
Method Article
אנקליציה רובוטית של בידוד פנים-לבלב בראש הלבלב
In This Article
Summary
כאן, אנו מציגים גישה רובוטית כדי. לעוקר מבודד בראש הלבלב
Abstract
הלבלב בתוך כירורגיה החוסך הניתוח עבור אינסולמות מונע את הסיכון של אי ספיקה האנדוקרינית אקסוקרינית ו הפוטנציאל הפוטנציאלי לאנמיה גבוהה הקשורים בניתוח הלבלב. ניתוחים רובוטיים ניתן להשתמש כחלופה עבור enuהלבלב פתוח מבלי להתפשר מיומנות 3D-vision.
אנו מציגים את המקרה של אישה בת 42 שהוצגה עם הזעה, רעידות ופרקים של היפוגליקמיה. מבחן צום אישר ייצור יתר של אינסולין. לאחר הדמיה לא חד-משמעית של CT-ו-MRI, בדיקת אולטרה-סאונד אנדוסקופית הראתה פצע היפוהד, שהיה מלא בתוך ראש הלבלב. למרות הסכמה הושגה עבור pancreatoduodenectomy, עקירה רובוטי נראה אפשרי. לאחר הגיוס, בדיקת אולטרה-סאונד הניתוח שימש כדי לזהות את הנגע ואת הקשר שלה עם תעלת הלבלב. חיתוך בוצע באמצעות תפר המתיחה, מזמרה חם diathermia דו קוטבית. תיקון איטום הוחל על הומוקיפאון וניקוז ממוקם. המטופל פיתח כיתה B הלבלב פיסטולה שעבורו בוצעה הפיום הספיטרסקופית. ניקוז כירורגי יכול להיות מוסר במרפאה לאחר 20 ימים. מחקרים פוטנציאליים צריכים לאשר את היתרונות לטווח קצר ולאורך זמן של עוקרים רובוטי של אינקלילימות.
Introduction
אינסולנומה היא הנפוצה ביותר לתפקוד הלבלב נוירואנדוקרינים (F-PNET) עם שכיחות שנתית של 1-32/100,000 חולים1. ניתוח חוסך לבלב (כלומר, enucleation) מצוין בעיקר עבור נגעים בודדים כמו כריתות הלבלב יכול להיות צורך בנגעים רב מוקדי או נרחב יותר1. יתרונות כלליים של הpancreatoduodenectomy בתוך המערכת באמצעות הגנה מפני שמירה על שימור הפונקציה (שניהם אקסוקרינית ו האנדוקרינית), פחות אובדן דם, זמן פעיל קצר יותר, והעדר של הארה בסיכון גבוה כנדרש לאחר pancreatoduodenectomy ומרכזי ריתה.
גישה מינימלית פולשנית כירורגי שואפת לקצר את הזמן להתאוששות תפקודית עם תוצאות דומות אונולוגיים1,2. בהשוואה ל-עקירה פתוח, עקירה רובוטית קשורה לזמן פעיל קצר יותר ואובדן דם נמוך עם סיכון דומה של פיסטולות הלבלב לאחר הניתוח וסיבוכים postאופרטיביים3,4. בהשוואה לפרוסקופי לפרוסקופ, עקירה רובוטיים נראה קשור לאיבוד דם פחות פנימי, אשר יכול להיות קשור לדרגות נוספות של חופש במהלך הניתוח זה יכול להוביל לניתוח מדויק יותר5.
שלושה מחקרים עד כה התייחס עקירה רובוטי של הלבלב, אחד מהם מתאר את הטכניקה כדי לעוקר מבודד בתוך הגדרת ילדים, האחרים לתאר טכניקות כדי לגרום לנגעים בלבלב שפיר6,7,8. במחקר זה, אנו מציגים טכניקה לעוקרים רובוטית של אינסוליומה שמקורם הלבלב. אנו מכירים באופן מלא כי וריאציות רבות אפשריות כמעט בכל צעד. זיהוי מדויק וניתוח קפדני, במיוחד בנוגע לצינור הלבלב העיקרי, הם קריטיים.
מקרה זה המוצג כאן כולל אישה בת 42 שהוצגו עם הזעה, רעידות ופרקים של היפוגליקמיה. מבחן צום אישר ייצור יתר של אינסולין. CT ו-MRI לא היו חד-משמעית; לכן, אולטראסאונד אנדוסקופי של ראש הלבלב נעשה. בדיקת אולטרה-סאונד אנדוסקופית הראתה שאינו בולטות, נגע היפואקו, שהיה מוטבע במלואו בתוך ראש הלבלב במרחק 1-2 מ"מ מצינור הלבלב הראשי. המטופל הסכים הן להליך pancreatoduodenectomy רובוטי והן לעוקרים רובוטציה. בשיתוף פעולה, ההחלטה הסופית נעשתה לבצע ביצוע.
Protocol
המטופל נתן הסכמה בכתב והודיע בעל פה להשתמש בנתונים רפואיים ובווידיאו המבצעי לחינוך ולמטרות מדעיות. מחקר זה בוצע בהתאם לכל ההנחיות המוסדיות, הלאומיות והבינלאומיות לרווחת האדם. קבלת הסכמה מושכלת בכתב הושגה מהמטופל לפרסום כתב יד זה וכל תמונה מלווה.
1. מיצוב
- מניחים את החולה על מזרן ואקום בתנוחה צרפתית פרקדן (הרגליים לפצל). הנמך את היד הימנית לצד הגוף על תמיכה בזרוע והארך את זרועו השמאלית. הטה את טבלת ההפעלה 10-20 ° ב-anti-טרנדלבורג ו-5-10 ° שמאלה.
2. הרובוט עגינה
- לאחר המחט Verres insufflation על הנקודה של פאלמרס, להציג ארבעה 8 מ"מ רובוט trocars (R1 4) בקו מעוקל למחצה ממש מעל הטבור. המרחק בין trocars הוא 6-7 ס מ: R1 בשורה השמאלית הקדמית הימנית, R2 בשורה midclavicular הנכון, R3 רק ימינה ומעל הטבור (מצלמה) ו-4 פשוט האמצעי האמצעי השמאלי בשורה midclavicular.
- להציג שני מסייע 5 מ"מ trocars 3-4 ס מ מתחת לשמאל (התקן איטום הספינה) ואת הזכות של הטבור.
3. הגיוס
- לגייס את flexure הכבד של המעי הגס באמצעות diathermia רובוטית או מכשיר איטום לפרוסקופי.
- להציג את הכבד מפסק משמאל ולמשוך את הכבד מפלח III ו-IV. הדבר מאפשר חשיפה אופטימלית של האתר הכירורגי. באופן אופציונלי, זה יכול להשעות את הקיבה.
- לזהות את הרצועה גקוליק ולחלק אותו עם המכשיר איטום כלי, ומכאן לפתוח את השק פחותה.
- המשך הגיוס מן לרוחב עד המדיאלי עד כופף הכבד של המעי הגס הוא שוחרר.
- בצע את התמרון של Kocher עד הווריד הכליה השמאלי מזוהה. לאחר מכן, לנתח את הווריד הימני משוחרר ולפנות באמצעות חותם כלי. שני השלבים הם אופציונליים אבל לשפר את החשיפה ואת השליטה אשר עשוי להיות שימושי במקרה של דימום מהראש הלבלב.
- למשוך את הלבלב ואת התריסריון עם הזרוע הרובוטית השלישית כדי לחשוף לחלוטין את העורקים הבטן והבנה קאווה הנחותים.
- לזהות את הווריד הימני ולחלק אותו עם המכשיר איטום לפרוסקופי וקליפים.
- מגייס את ראש הלבלב באמצעות קרס הקאטרי.
4. בדיקת אולטרה-סאונד מבצעית
- הציגו את הגשוש בדיקת אולטרה סאונד ולזהות את המסלול של צינור הלבלב ואת הנגע פנים-הלבלב.
- . עם הקרס הקואטרי, בעזרת לווין האולטרה-סאונד
5. חיתוך והרכבה
- מניחים תפר משיכה. דרך הנגע
- הרם את הנגע עם תפר את המתיחה ועוקרים את הנגע העוקף עם מספריים diathermic.
- חותכים אצבע מכפפה כירורגית סטרילי ולהציג אותו לתוך חלל הבטן. לשים את רקמת enucleated באצבע ולחלץ את הדגימה. הגג של צינור הלבלב נראה בתחתית האתר של העוקרים.
- חותכים אצבע מכפפה כירורגית סטרילית ולהכניס תיקון איטום יבש . הציגו את האצבע. בחלל הבטן מיקום תיקון איטום על הפגם בתוך הלבלב כימומה. מקום שני רטוב 10 x 10 ס מ על גבי ולהסיר את פדים לאחר 3-5 דקות, תיקון איטום נשאר על הראש הלבלב.
הערה: אין להרטיב את תיקון האיטום לפני המיצוב. הצבת תיקון היא אופציונלית; מחקרים לא להפגין את יעילותו בהפחתת הסיכון של פיסטולות הלבלב.
6. מיקום ניקוז
- הצג 18-20 הניקוז הצרפתי מהצד הימני של המטופל ולקדם אותו על הראש הלבלב.
- בדיקה המיוצר נוזלי ניקוז לרמות עמיקלז על היום הראשון והשלישי postoperבמשותף לבדוק לאחר הניתוח פיסטולה. שקול הצבת סטנט בצינור הלבלב אם רמת עמיקלז בעקביות עולה פי 3 מהמגבלה העליונה של המוסדות סרום נורמלי עמיקלז9.
תוצאות
זמן הפעולה הכולל היה 180 דקות עם אובדן דם של 5 מ ל. , ביום הפוסט השלישי. רמות עמילאז עדיין גבוהות לפיכך החלטנו לנסות מיקום סטנט בתעלת הלבלב. במהלך ERCP, זה היה באופן מבחינה טכנית לא ריאלי, ולכן בוצע פיום הלבלב. זה היה מסווג כציון B הלבלב פיסטולה, עקב התערבות ERCP9. המטופלת שוחררה. ביום הניתוח 7 לאחר בריחת עמילז היתה מנורמלת, הניקוז יכול להיות מוסר במרפאת החוץ ביום הפוסט-פעיל 20.
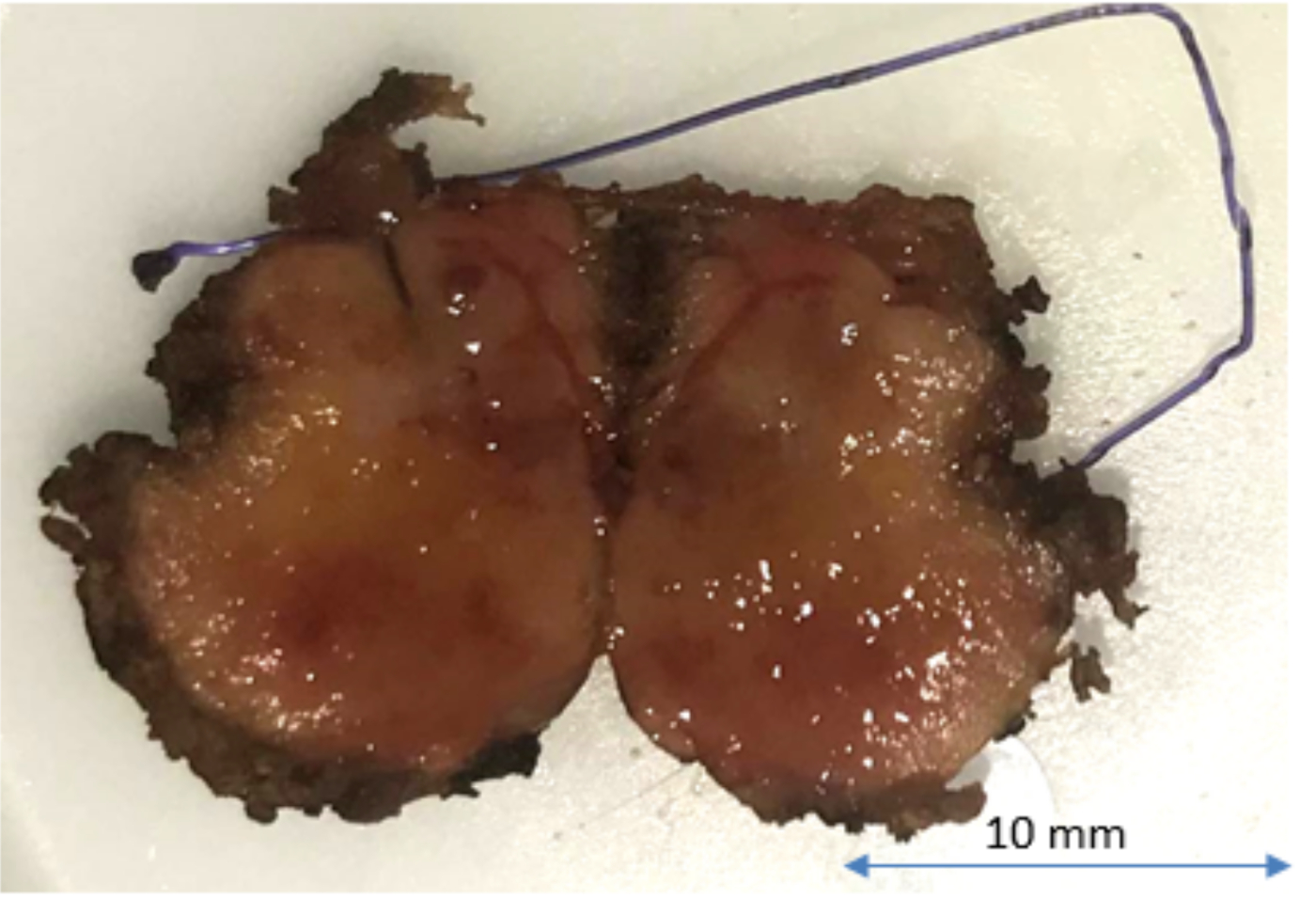
הבדיקה היסטראתולוגית חשפה כיתה 1 (mitotic index < 2/mm2 ו Ki67 < 3%) היטב הבדיל גידול נוירואנדוקרינים מדידה 1.5 ס מ עם מכתים אינסולין חיובי (ראה איור 1). תאים סרטניים היו מיקרו באופן מאכל שולי הריתת (R1).
תוצאות דומות מהספרות
באופן כללי, זמן עגינה רובוטית של 5-10 min כבר תיאר10 , כמו גם זמן פעיל של 206 ± 67 דקות, מפעיל אובדן דם 43 ML (iqr 27-98)11 ואת גודל הגידול החציוני של גידולים נוירואנדוקריניים הלבלב של 16 מ"מ (iqr 11-22)12. שהייה צפויה בבית החולים הפוסט הוא 5 ימים (iqr 3-12)11, שיעור תחלואה עיקריים 30%11, עם נמוך מאוד בבית החולים שיעור התמותה (0%)12,13. השיעור של שיעור פיסטולה הלבלב רלוונטי קלינית הוא דיווח להיות 30-40%11,12 ואת הקיבה מושהית ריקון שיעור 0-26%12,13.

איור 1: הדגימה. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
Discussion
ישנם שישה שלבים קריטיים מודגשים כאן: עגינה מיקום ורובוט, הגיוס, בדיקת אולטרה-סאונד הניתוח, תפר המתיחה, ניתוח, ומיקום ניקוז. המרה כדי לפרוטומיה צריך להתבצע במקרה של דימום פנימי בלתי נשלט, או במקרה הגידול אינו ממוקם כראוי עם אולטרסאונד.
מפסק כבד מועיל לחשוף. את האתר הכירורגי בדיקת אולטרה-סאונד ממלאת תפקיד חשוב בהפיכת מועד הפעולה החוסך באמצעות כימומה. רצוי, a (התערבותית) רדיולוג צריך לזהות את הנגע ובמיוחד את הקשר שלה עם תעלת הלבלב14. החלת תפר המתיחה דרך הנגע מקל על הקרע, במיוחד בתוך מעבר כריתת כימומה.
מלבד סיבוכים כלליים של ניתוח, פיסטולה הלבלב צריך להיות מנוטר הדוק אחרי הליך זה15. כפי שמוצג כאן, הנגע היה קשר קרוב עם צינור הלבלב עם המרחק 1-2 מ"מ בלבד בין אינסוליומה לבין תעלת הלבלב. בגלל הסיכון הזה, ניקוז רטרו הלבלב היה ממוקם במעקב לפחות במהלך הימים הראשונים לאחר הניתוח9.
שוליים מאכל באופן חיובי (R1) כריתה הושגה. למרות שוליים מאכל שליליים (R0) כריתה יהיה עדיף, זה לא נחשב הכרחי, כמו זה אינו קשור עם משופר לטווח ארוך ההישרדות גידולים נוירואנדוקריניים16.
מגבלות של ניתוחים רובוטיים הם הזמינות של מערכת רובוטית, הצורך הכשרה ספציפית, חוסר משוב מישוש ועלויות גבוהות17. הדרגות הנוספות של החופש המתקבל על ידי המערכת הרובוטית עשוי להיות שימושי עקירה של אינקלימות, במיוחד במקרה של קירבה לתעלת הלבלב, כמו במקרה זה הפגינו.
עוקרים רובוניציה של אינסולמות בידוד נראה אפשרי; עדיין, מחקרים פוטנציאליים עתידיים צריך לאשר הצעה זו. אנו מאמינים כי הטכניקה המתוארת, עם ההתאמה הטובה ביותר דיקת אולטרה סאונד של הנגע, יכול להיות חלופה רבת ערך עבור עקירה פתוח כאמור בהנחיות הבאות1. מחקרים נוספים נחוצים להשוואת תוצאות קצרות ולטווח ארוך לאחר התקרות רובוטית, פתוחה ולפרוסקופ.
Disclosures
. למחברים אין מה לגלות
Acknowledgements
למחברים אין ותודות.
Materials
| Name | Company | Catalog Number | Comments |
| Arietta V70 Ultrasound | Hitachi | - | The ultrasound system. |
| Cobra Liver Retractor Diamond-Flex | CareFusion | 89-6216 | Retracting the liver for optimal exposure of the surgical site. |
| da Vinci Surgeon Console | Intuitive Surgical | SS999 | Used to control the surgical robot. |
| da Vinci Vision Cart | Intuitive Surgical | VS999 | The vision cart houses advanced vision and energy technologies and provides communications across da Vinci system components. |
| da Vinci Xi | Intuitive Surgical | K131861 | The surgical robot: 'patient side-cart'. |
| da Vinci Xi Endoscope with Camera, 8 mm, 30° | Intuitive Surgical | 470027 | The camera of the da Vinci robot. |
| ENDOEYE Rigid Video Laparoscope, 10 mm, 30° | Olympus | WA50042A | To see within the intra-abdominal cavity. |
| ENDOWRIST Fenestrated Bipolar Forceps | Intuitive Surgical | 470205 | Used for dissection and coagulation. |
| ENDOWRIST HOT SHEARS | Intuitive Surgical | 470179 | Used for cutting and coagulation. |
| ENDOWRIST Mega SutureCut Needle Driver | Intuitive Surgical | 470309 | Used as a needle driver. |
| ENDOWRIST Permanent Cautery Hook | Intuitive Surgical | 470183 | Used for coagulation. |
| ENDOWRIST PROGrasp Forceps | Intuitive Surgical | 470093 | Used for dissection. |
| LigaSure Dolphin Tip 37cm | Medtronic | LS1500 | Used for vessel sealing and dividing. |
| Robotic ultrasonography transducer | Hitachi | L43K | Used for intraoperative laparoscopic ultrasonography. |
| TachoSil 4.8 cm x 4.8 cm | Baxter Healthcare Corporation | 1144923 | Used for coagulation. |
References
- Falconi, M., et al. ENETS Consensus Guidelines Update for the Management of Patients with Functional Pancreatic Neuroendocrine Tumors and Non-Functional Pancreatic Neuroendocrine Tumors. Neuroendocrinology. 103 (2), 153-171 (2016).
- Su, A. P., et al. Is laparoscopic approach for pancreatic insulinomas safe? Results of a systematic review and meta-analysis. Journal of Surgical Research. 186 (1), 126-134 (2014).
- Shi, Y., et al. Pancreatic enucleation using the da Vinci robotic surgical system: a report of 26 cases. The International Journal of Medical Robotics. 12 (4), 751-757 (2016).
- Tian, F., et al. Propensity score-matched analysis of robotic versus open surgical enucleation for small pancreatic neuroendocrine tumours. British Journal of Surgery. 103 (10), 1358-1364 (2016).
- Zhang, T., et al. Enucleation of pancreatic lesions: indications, outcomes, and risk factors for clinical pancreatic fistula. Journal of Gastrointestinal Surgery. 17 (12), 2099-2104 (2013).
- Liang, M., et al. Robotic enucleation for pediatric insulinoma with MEN1 syndrome: a case report and literature review. BMC Surgery. 18 (1), 44 (2018).
- Ore, A. S., Barrows, C. E., Solis-Velasco, M., Shaker, J., Moser, A. J. Robotic enucleation of benign pancreatic tumors. Journal of Visualized Surgery. 3 (10), (2017).
- Jin, J. B., et al. Robotic Enucleation for Benign or Borderline Tumours of the Pancreas: A Retrospective Analysis and Comparison from a High-Volume Centre in Asia. World Journal of Surgery. 40 (12), 3009-3020 (2016).
- Bassi, C., et al. The 2016 update of the International Study Group (ISGPS) definition and grading of postoperative pancreatic fistula: 11 Years After. Surgery. 161 (3), 584-591 (2017).
- Boone, B. A., et al. Assessment of quality outcomes for robotic pancreaticoduodenectomy: identification of the learning curve. JAMA Surgery. 150 (5), 416-422 (2015).
- Zureikat, A. H., et al. 250 robotic pancreatic resections: safety and feasibility. Annals of Surgery. 258 (4), 559-562 (2013).
- Jilesen, A. P. J., et al. Postoperative Outcomes of Enucleation and Standard Resections in Patients with a Pancreatic Neuroendocrine Tumor. World Journal of Surgery. 40 (3), 715-728 (2016).
- Crippa, S., et al. Surgical Management of Insulinomas: Short- and Long-term Outcomes After Enucleations and Pancreatic Resections. JAMA Surgery. 147 (3), 261-266 (2012).
- Li, W., et al. Laparoscopic ultrasound enhances diagnosis and localization of insulinoma in pancreatic head and neck for laparoscopic surgery with satisfactory postsurgical outcomes. Ultrasound in Medicine and Biology. 37 (7), 1017-1023 (2011).
- Lu, W. J., et al. Enucleation of benign or borderline pancreatic head tumors adjacent to the common pancreatic duct. Pancreas. 41 (2), 336-337 (2012).
- Zhang, X. F., et al. Margin status and long-term prognosis of primary pancreatic neuroendocrine tumor after curative resection: Results from the US Neuroendocrine Tumor Study Group. Surgery. 165 (3), 548-556 (2019).
- Gkegkes, I. D., Mamais, I. A., Iavazzo, C. Robotics in general surgery: A systematic cost assessment. Journal of Minimal Access Surgery. 13 (4), 243-255 (2017).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved