
このコンテンツを視聴するには、JoVE 購読が必要です。 サインイン又は無料トライアルを申し込む。
Method Article
マイクロ流体デバイスでパッシブポンピング用高速液滴ベースのデリバリーシステム
要約
小説マイクロ流体システムは受動的なポンプの現象とユーザ制御された流体供給システムを使用して開発されました。このマイクロ流体システムは、低コスト、使いやすさ、体積精度、高速、再現性と自動化を与えられた生物学的なさまざまなアプリケーションで使用される可能性があります。
要約
小説マイクロ流体システムは受動的なユーザー制御の液滴ベースの液体供給システムと一緒にポンプの現象を使用する開発されました。パッシブポンピングは表面張力が閉じたチャンネルで圧力差を駆動流体の運動を誘導する現象です。自動化された流体供給システムは、流体リザーバと制御システムに接続されているマイクロノズルを持つ電圧制御バルブのセットで構成されています。これらの電圧制御弁は、高い周波数の方法で、マイクロ流体デバイスの入口に流体の液滴を実現するために容積正確な方法を提供しています。現在の研究例に示す寸法に基づいて、システムは毎分4ミリリットルを(260um断面チャネルで2.2ミリメートルを介して)流れることが可能です。これらの同じチャンネルの寸法に基づいて、チャネル内の点の流体交換は、わずか8個もミリ秒単位で達成することができます。それはシステムのモメンタム(チャネルにおけるバルブおよび流体の速度によって作成された液滴の組み合わせによって与えられる)、および液体の表面張力との間の相互作用があることが観察される。勢いが流体の流れ(またはその逆)への速度を提供する場合、入口での表面張力の平衡は、任意のフローに急停止しています。この突然の停止は、ユーザーがチャネルの流動特性を制御することができ、試薬の納入から、薬物の細胞の研究にどこまで、生物学的なさまざまなアプリケーションのための扉を開きます。また、ノズルが浅い角度で入口を目指しているときに、液滴の運動量は入口で複数の液滴の混合などの追加の興味深い流体現象を、引き起こすことが観察される。
プロトコル
本報告書では、さまざまな流体現象の数を達成するために、マイクロ流体チャネルを介して所望のボリュームをポンプするために小さな液滴の表面張力を使用する流体の配信方法を示しています。たとえば、ユーザーは、できるだけ速やかに、単一の流体を流動させるかもしれません、または特定の流体のパターンを作成するために矢継ぎ早に複数の流体を提供する。これを行うためには、ユーザーは最初にマイクロ流体デバイスを中心に構築されたアプリケーションを持っている必要があります。 microflluidicデバイスが結合する必要はありませんが、親水性材料からなされるべきである。 Therforeは、メソッドは、主にマイクロ流体チャネルの幾何学的制約によって決まる性能で、ほとんどすべてのマイクロ流体デバイスを利用することができます。この方法の幾何学的制約を移動するため、関連する数値解析への導入が最初に表示されます。
- 分析方法:ラプラス法とウォッシュバーン法[1]によれば、人はその大きさと方程式に見られるように流れる液体(1)のプロパティへのマイクロ流体チャネル内の流量を関連付けることができます、
 (1)
(1)
ΔPは、入口と出口間の圧力差である、γは液体の表面張力である、、Rは流量Qが入口ドロップ半径、であり、式(2)で説明したように、Kは流体抵抗です。 (2)
(2)
ηは液体の粘度である場合、L 0は 、チャネルの長さ、hはチャネルの高さ、Wはチャネル幅である、λ= W / H と g(λ)= 1.5であればλ> 4.45または
λ<4.45であれば。常にそのH (3)
同じ分析はことを知っていることによって、チャネル内の流体の速度のために行うことができるVは流体の平均速度であるとHW断面積またはであるQ = VA、。式にこれらを差し込む(3)は、式(4)を思い付く
(4)
頻繁にマイクロ流体生物学に適用されている重要な機械的な概念は、式(5)によって速度と速度を流れるように関連するせん断応力、、です。
(5)
チャネル寸法と流体の性質の関数としての流量、速度とその物理的意味との関係を知ることは、特定の目的のためのマイクロ流体デバイスの設計に重要です。デバイスが作成されると、ユーザーは、デバイス内の所望の流れ特性を達成するために、流体供給システムをキャリブレーションしなければなりません。 - の設定と配信システムのキャリブレーションの手順 :
- ポリジメチルシロキサン(PDMS、Sylgard 184、ダウコーニング社)[2]を用いたソフトリソグラフィーの手法を使ってマイクロ流体デバイスを作成します。 PDMSマイクロ流体デバイス[5]作るための方法を示す数値Joveの記事があります。 2.2ミリメートル幅、10mmの長さと260umの高さ:このデモでは、我々は次のように大きさで、シンプルなストレートチャンネルを選んでいます。入口と出口の直径は、(図1)はそれぞれ1.8ミリメートルと5.1ミリメートルです。可逆的に[5]をガラススライド(または他の適当な基板)の上にそれを押すと、気泡を取り除いてガラススライドにPDMSデバイスを接続。可逆添付ファイルは、デバイスが複数回再使用することができます。方法はまた、恒久的に結合されたデバイスと併用できますが、それは必須ではありませんすることができます。
- 液体とデバイスを埋める。 PDMSの疎水性の性質とガラスの親水性は、チャネルに、入口に置かれているドロップ、またはコンセントを移動するのに役立ちます。液体のドロップは、それ自体がチャネルに入ることを望んでいませんか泡がチャンネルに移動した場合、ユーザーは、入口での液体のドロップ、またはコンセントを入れ、液体を吸うために反対側の端にピペットを使用することができる場合チャネルを介して。チャネルに液体の移動を手助けするもう一つの方法は、ガラススライドからPDMSデバイスを分離し、静かにPDMSデバイスとエタノールでガラススライドを洗浄することです。この時間と使用して弱体化されている可能性がそれぞれPDMS、ガラススライド、その疎水性と親水性の性質、、に戻ります。
- 液体でデバイスを充填した後、入口とbiggeに小さなドロップを配置rは、コンセントにドロップします。ポンピング受動を確認しては、入口の崩壊で、小さなドロップを見て、出口に向かって流体の流れを観察することによって起こっている。再び、チャネル内部に気泡がないことを確認してください。
- リー社の[3] VHSマイクロ分注開始キットを使用して、リーVHS M / 2の24Vバルブで構成される一つ以上のバルブ(図2のバルブのセットアップ)、0.0100のオリフィスサイズが0.062 MINSTACノズル"、まとめソフトチューブアダプター、リースパイクとホールドドライバ(ユーザーコントロールのための、図示せず)およびリード線Ass'y(スパイクにバルブを接続すると示され、ドライバのないホールド)の李0.062 Minstac。
- バルブを保持する簡単な方法は、バイオサイエンスのツールのミニチュアホルダーを使用している(図2)[4]。これらは、正確を目指して、ホルダーの一端に接着バルブで実験中に特定の位置でバルブを保持し、反対側にマグネットベース(図示せず)を使用してする方法を提供します。
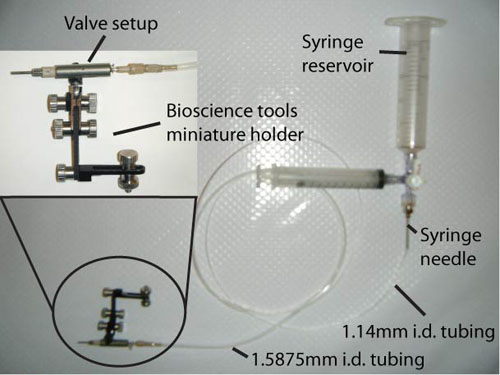
- 数フィートのPDMSマイクロ流体デバイス(私たちのケースで我々が使用される¾周囲にオープンオンスのシリンジは、図2を参照)上に配置されるタンクのシステムを作る。貯水池は、貯水池の高さに比例する圧力で、ノズルを駆動する圧力ヘッドが用意されています。またノズルのバルブは、さまざまな手段の任意の数(すなわち、圧縮ガス)によって加圧さすることができます。シリンジに注射針を取り付けます。典型的な注射針は簡単に1.14ミリメートル内径のチューブにアタッチされます。 1.14ミリメートルのチューブは、簡単に1.58ミリメートル(1 / 16")バルブのソフトチューブアダプター"自体が接続して内径のチューブ"にアタッチされます。 1.58ミリメートルのチューブの接続〜1.14 mmの液体の漏れを防止するためには、シール剤としてPDMSを使用することができます。注射針とリー(株)のバルブの間に線があるので、液体を注射器タンクを埋める。余分なシリンジとバルブは、パージプロセス(図示しかし、図2に分類されない)にするために使用されることがあります。これは、これらの弁がパージされる方法です(それらは通常、ソレノイドバルブを閉じている)、およびバルブを通って0.0100 ''ノズル外タンクから流れる液体のスタートを見て、バルブの側面に磁石を置きます。
- バルブ開放時間(オープン時間は、バルブが当たりのパルスごとに渡すために、流体許可されている時間です)と周波数(秒当たりのパルス数)を選択してシステムを校正します。選択した期間(分かそこら、単に全体の実行時間を覚えている)のための1つのバルブをアクティブにします。バルブから配信された液体を秤量する。総実行時間は、周波数と単位パルスのオープン時間は、ミリ秒当たりのグラム数を計算知ることは、バルブから出て撮影。この"ミリ秒当たりのグラム数"の値は、ユーザーがバルブから配信されるようにすることができる任意のボリュームのためのオープン時間を選択できるようになります。
例:システムは、分(60秒)のために活性化。周波数は15ヘルツ(1秒間に15パルス)であった。あたりのパルスのオープン時間は20ミリ秒(ms)であった。
(20ミリ秒)(15Hz)(60)= 18000ms。
これは1分間に60,000ミリ秒のその外を意味し、バルブは18,000ミリ秒のために実際に開いていた。
レッツは、流体の量が5グラムを秤量引き渡さ前提としています。その後、
5グラム/ 18000ミリ秒= 2.78e -4グラム/ミリ秒。
水の場合には、その密度はミリリットル当たり1グラム(ML)であることと、
2.78e -4グラム/ミリ秒= 2.78e -4 ML / MS。
キャリブレーション後は、ドロップの量は、オープン時間に依存しています。たとえば、20msの、そして前の例と同じように残りのすべてのパラメータの開いている時間と、
(2.78e -4 ML / MS)(20ミリ秒)= 5.56e -3 ML = 5.56μL。
yがxマイクロリットル(μL)ボリュームのドロップを作るために必要なオープン時間を見つけるには、
(XμL)/ [(2.78e -4 ML / MS)(1000μL/ mL)を] = yをミリ秒
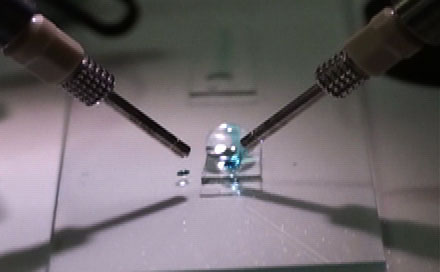
8)PDMSデバイス(図3)の入口に1つ以上のノズルを目指す。システムのキャリブレーションせず、マイクロ流体デバイスの寸法に基づいて、各バルブから出てくるボリュームを計算する。 (最大流量を得るために)ポンプの高速パッシブの場合は、入口面と90度の接触角を有するインレットドロップ[2]を作成するために必要な入口ドロップ量を計算する。パケットを作成するため、バルブの周波数と、オープン時間や順序で2つのバルブをアクティブにするために必要なバルブタイミングを計算する。図3に示すように、2つのノズルは、入口で指摘することができます。これは、すべてのチャネル入口を目指した、複数のノズルにも拡張できます。
代表的な結果:
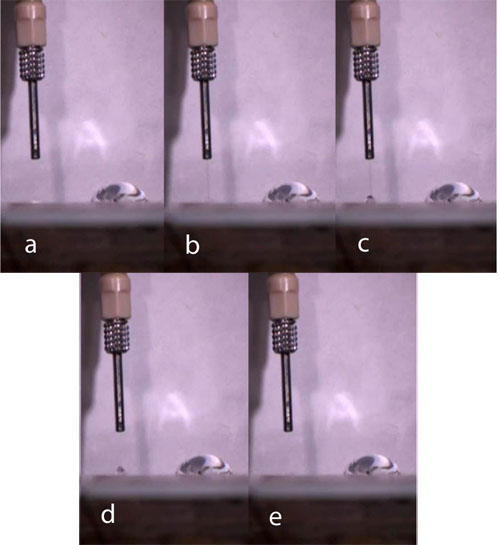
適切に校正されたときは、バルブ開正しく計算時間と適切に入口を目指したノズルで、ユーザが受動的にポンプ流量(図4)を参照することができるはずです。液体shのバーストオールドは、バルブから出て、入口に達する。液体が口に達すると、チャネルに入口ドロップの瞬間崩壊は、出口に向かって、そこです。チャネル内の液体は、入口の低下の崩壊中にのみ移動します。チャンネル内の完全な流体の動きは瞬間的流体の停止と明確に定義された流体の境界(ユーザーが複数の液体を流れている場合)を提供する、ドロップ崩壊の終わりで停止します。ドロップ崩壊の持続時間は、入口ポートの半径と入口のドロップ[1]のボリュームに依存する。私たちの実験と設計では、入口ドロップ崩壊は、数ミリ秒の問題で発生します。

図つの入口、左、と一つの出口1。PDMSマイクロ流体デバイス、右。してくださいここをクリックして図1の拡大バージョンを参照すること。
{kind=link}

図2。貯水池のシステムとバルブのセットアップ。してくださいここをクリックして図2の拡大バージョンを参照すること。
{kind=link}

図3 2つのバルブは、両方のマイクロ流体デバイスの単一の入口を目指した。してくださいここをクリックして図3の拡大バージョンを参照すること。
{kind=link}

図4バルブから流体の放出に続く入口ドロップ崩壊のタイムステップのシーケンス(33ミリ秒)。してくださいここをクリックして図4の拡大バージョンを参照すること。
{kind=link}
ディスカッション
- 周波数とあたりのパルス量(正しいオープン時間に起因する)の適切な組み合わせが選択されている場合、ポンプの高速パッシブの場合は、ユーザーが静的なドロップまたはシェル入口とチャネル内の非常に速い流速と思われるものを参照してくださいしてください。オーバフローが発生した場合は、オープン時間及び/または周波数が高すぎる。
- パルスが(最初から最後まで)行われている間に...
謝辞
資金調達は、ディスカバリーのウィスコンシン大学で提供されていました。
参考文献
- Berthier, E., Beebe, D. J. Flow rate analysis of a tension driven passive micropump. Lab Chip. 7, 1475-1478 (2007).
- Duffy, D. C., McDonald, J. C., Schueller, O. J. A., Whitesides, G. M. Rapid Prototyping of Microfluidic Systems in Poly(dimethylsiloxane). Anal. Chem. 70, 4974-4984 (1998).
- Harris, J., Lee, H., Vahidi, B., Tu, C., Cribbs, D., Cotman, C., NL, J. e. o. n. Non-plasma Bonding of PDMS for Inexpensive Fabrication of Microfluidic Devices. J Vis Exp. (9), (2007).
- Walker, G. M., Beebe, D. J. A passive pumping method for microfluidic devices. Lab Chip. 2 (3), 131-134 (2002).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved