Method Article
Preklinik Görüntüleme Modalitelerinin Multimodal Cihazlar Arası ve İşaretleyicisiz Ortak Kaydı
Bu Makalede
Özet
Patofizyolojinin kapsamlı bir şekilde anlaşılması için genellikle çoklu görüntüleme modalitelerinin kombinasyonu gereklidir. Bu yaklaşım, iki modalitenin koordinat sistemleri arasında diferansiyel bir dönüşüm oluşturmak için fantomları kullanır ve bu daha sonra ortak kayıt için uygulanır. Bu yöntem, üretim taramalarında referans maddelerine olan ihtiyacı ortadan kaldırır.
Özet
Pozitron emisyon tomografisi (PET) ile birleştirilmiş X-ışını bilgisayarlı tomografi (BT) veya PET ile birleştirilmiş manyetik rezonans görüntüleme (MRI) gibi entegre preklinik multimodal görüntüleme sistemleri yaygın olarak bulunur ve tipik olarak sağlam bir şekilde birlikte kaydedilmiş hacimler sağlar. Bununla birlikte, bağımsız bir MRG'yi mevcut bir PET-CT ile birleştirmek veya optik tomografi veya yüksek çözünürlüklü X-ışını mikrotomografisinden ek verileri dahil etmek için genellikle ayrı cihazlara ihtiyaç duyulur. Bu, çok modlu fare yatağı tasarımı, referans işaretleyici ekleme, görüntü yeniden yapılandırma ve yazılım tabanlı görüntü füzyonu gibi karmaşık yönleri içeren görüntü ortak kaydını gerektirir. Referans belirteçleri genellikle dinamik aralık sorunları, görüntüleme görüş alanındaki sınırlamalar, işaretleyici yerleştirmedeki zorluklar veya zaman içinde işaretleyici sinyal kaybı (örneğin, kuruma veya bozulmadan kaynaklanan) nedeniyle in vivo veriler için sorun oluşturur. Bu zorluklar, görüntü ortak kaydı gerektiren her bir araştırma grubu tarafından anlaşılmalı ve ele alınmalıdır, bu da ilgili ayrıntılar mevcut yayınlarda nadiren açıklandığından, tekrarlanan çabalarla sonuçlanmalıdır.
Bu protokol, bu sorunların üstesinden gelen genel bir iş akışını ana hatlarıyla belirtir. Başlangıçta referans belirteçleri veya görsel yapılar kullanılarak diferansiyel bir dönüşüm oluşturulsa da, üretim taramalarında bu tür belirteçler gerekli değildir. Yeniden yapılandırma yazılımı tarafından oluşturulan hacim verileri ve meta veriler için gereksinimler ayrıntılıdır. Tartışma, her modalite için gereksinimlerin ayrı ayrı elde edilmesini ve doğrulanmasını kapsar. İki görüntüleme modalitesinin koordinat sistemleri arasında diferansiyel bir dönüşüm oluşturmak için fantom tabanlı bir yaklaşım açıklanmaktadır. Bu yöntem, referans belirteçleri olmadan üretim taramalarının nasıl birlikte kaydedileceğini gösterir. Her adım, ticari olarak satılan fantomlar için önerilerle birlikte mevcut yazılım kullanılarak gösterilmiştir. Bu yaklaşımın, çeşitli bölgelere kurulan farklı görüntüleme modaliteleri kombinasyonları ile uygulanabilirliği sergilenmektedir.
Giriş
Farklı preklinik görüntüleme yöntemlerinin belirgin avantaj ve dezavantajları vardır. Örneğin, X-ışını bilgisayarlı tomografi (BT), kemikler ve akciğerler gibi farklı radyo yoğunluklarına sahip anatomik yapıları incelemek için çok uygundur. Hızlı çekim hızı, yüksek üç boyutlu çözünürlüğü, göreceli görüntü değerlendirme kolaylığı ve kontrast maddeleri olsun veya olmasın çok yönlülüğü nedeniyle yaygın olarak kullanılmaktadır 1,2,3. Manyetik rezonans görüntüleme (MRG), iyonlaştırıcı radyasyon olmadan en çok yönlü yumuşak doku kontrastını sağlar4. Öte yandan, pozitron emisyon tomografisi (PET), tek foton emisyon bilgisayarlı tomografi (SPECT), floresan aracılı tomografi (FMT) ve manyetik parçacık görüntüleme (MPI) gibi izleyici tabanlı modaliteler, moleküler süreçleri, metabolizmayı ve radyoaktif işaretli tanısal veya terapötik bileşiklerin biyolojik dağılımını yüksek hassasiyetle kantitatif olarak değerlendirmek için yerleşik araçlardır. Bununla birlikte, çözünürlük ve anatomik bilgiden yoksundurlar 5,6. Bu nedenle, daha anatomi odaklı modaliteler tipik olarak, izleyici tespitinde güçleri olan oldukça hassas olanlarla eşleştirilir7. Bu kombinasyonlar, belirli bir ilgi alanı içindeki izleyici konsantrasyonlarının nicelleştirilmesini mümkün kılar 8,9. Kombine görüntüleme cihazları için, modalite ortak kaydı genellikle yerleşik bir özelliktir. Bununla birlikte, örneğin cihazların ayrı olarak satın alınıp alınmadığı veya hibrit bir cihazın mevcut olup olmadığı gibi farklı cihazlardan yapılan taramaları birlikte kaydetmek de yararlıdır.
Bu makale, temel araştırma ve ilaç geliştirme için gerekli olan küçük hayvan görüntülemede çapraz modalite füzyonuna odaklanmaktadır. Önceki bir çalışma10 , bunun özellik tanıma, kontur haritalama veya referans belirteçleri (referanslar) ile elde edilebileceğine işaret etmektedir. Referanslar, farklı görüntüleme modalitelerinden gelen görüntüleri doğru bir şekilde hizalamak ve ilişkilendirmek için referans noktalarıdır. Özel durumlarda, referanslar çıplak farelerin derisinde Çin mürekkebi noktaları bile olabilir11; Bununla birlikte, genellikle, yerleşik referans işaretleyicilere sahip bir görüntüleme kartuşu kullanılır. Bu sağlam ve iyi geliştirilmiş bir yöntem10 olsa da, her tarama için kullanılması pratik sorunlar ortaya çıkarır. MRG ile tespit edilebilen referanslar genellikle sıvı bazlıdır ve depolama sırasında kuruma eğilimindedir. PET, sinyali yayıcının yarı ömür süresine göre bozulan, genellikle biyomedikal uygulamalar için kısa olan ve taramadan kısa bir süre önce hazırlık gerektiren radyoaktif belirteçler gerektirir. Referans işaretleyiciden ve incelenen nesneden gelen sinyalin dinamik aralığındaki uyumsuzluk gibi diğer sorunlar, in vivo görüntülemeyi güçlü bir şekilde etkiler. Geniş dinamik kontrast aralığı, işaretleyici sinyal gücünün incelenen nesneye sık sık uyarlanmasını gerektirir. Sonuç olarak, analizde zayıf bir işaretleyici sinyali tespit edilemeyebilirken, güçlü bir işaretleyici sinyali görüntü kalitesini bozan artefaktlar oluşturabilir. Ek olarak, işaretçileri tutarlı bir şekilde dahil etmek için, görüş alanının birçok uygulama için gereksiz yere büyük olması gerekir, bu da potansiyel olarak daha yüksek radyasyona maruz kalmaya, daha büyük veri hacimlerine, daha uzun tarama sürelerine ve bazı durumlarda daha düşük çözünürlüğe yol açar. Bu, laboratuvar hayvanlarının sağlığını ve üretilen verilerin kalitesini etkileyebilir.
Dönüşüm ve diferansiyel dönüşüm
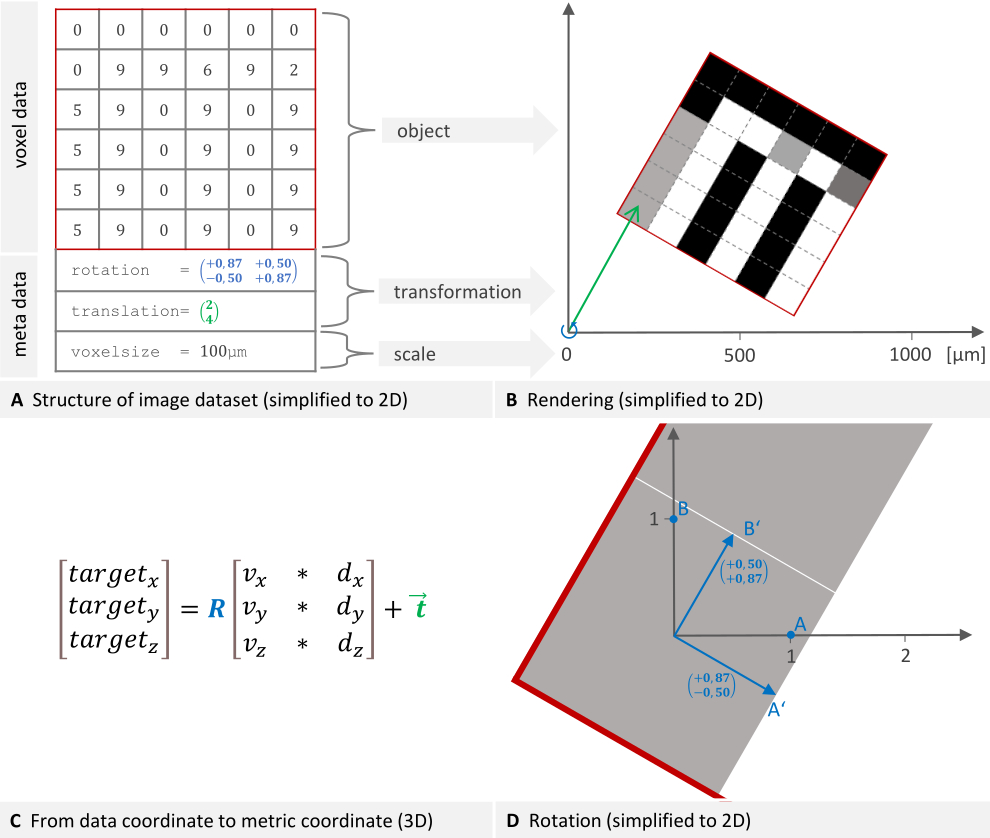
Bir görüntü veri kümesi, voksel verilerinden ve meta verilerden oluşur. Her voksel bir yoğunluk değeri ile ilişkilidir (Şekil 1A). Meta veriler, görüntüleme cihazının koordinat sistemindeki veri kümesi yerleşimini (Şekil 1B) ve koordinat sistemini ölçeklendirmek için kullanılan voksel boyutunu belirten bir dönüşüm içerir. Cihaz türü veya tarama tarihi gibi ek bilgiler isteğe bağlı olarak meta verilerde saklanabilir. Bahsedilen dönüşüm matematiksel olarak katı cisim dönüşümü olarak adlandırılır. Katı cisim dönüşümleri, her bir nokta çifti arasındaki mesafeyi korurken bir görüntüdeki veya geometrik uzaydaki nesnelerin yönünü veya konumunu değiştirmek için kullanılır, yani dönüştürülen nesne, uzayda döndürülürken ve çevrilirken boyutunu ve şeklini korur. Bu tür dönüşümlerin herhangi bir serisi, bir rotasyon ve ardından bir ötelemeden oluşan tek bir dönüşüm olarak tanımlanabilir. Yazılım tarafından veri koordinatından metrik hedef koordinata geçmek için kullanılan formül, R'nin bir ortonormal rotasyon matrisi olduğu, d ve v'nin voksel indeksleri ve boyutları olduğu ve t'nin 3 x 1 öteleme vektörü 12 olduğu Şekil 1C'de gösterilmiştir. Döndürme Şekil 1D'de detaylandırılmıştır.

Şekil 1: Bir görüntü veri kümesi yapısının 2B gösterimi ve küresel bir koordinat sistemine yerleştirilmesi. (A) Bir görüntü veri kümesi, voksel verileri ve meta verilerden oluşur. Yerleşimi ve voksel boyutunu belirten dönüşüm, temel meta veri bileşenleridir. (B) Görüntü, cihazın koordinat sistemine dönüştürülür. Nesneyi yerleştirmek için gerekli dönüştürme, bir döndürme (mavi) ve ardından bir ötelemeden (yeşil) oluşur. (C) Veri koordinatından hedef koordinata geçmek için yazılım, R'nin bir ortonormal rotasyon matrisi olduğu, d ve v'nin voksel indeksleri ve boyutları olduğu ve t'nin 3 x 1 öteleme vektörü olduğu bu formülü kullanır. (D) Bir dönme matrisi (A düzleminde mavi), dönen noktaların doğrusal dönüşümünü temsil eder. Bir noktanın koordinatlarını bu matrisle çarpmak, yeni, döndürülmüş koordinatlarla sonuçlanır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Diferansiyel dönüşüm, koordinatları bir koordinat sisteminden diğerine, örneğin PET'ten X-ışını mikrotomografisine (μCT) dönüştüren katı bir cisim dönüşümüdür ve referans belirteçleri kullanılarak hesaplanabilir. Her iki koordinat sisteminde de en az üç ortak nokta - referanslar - seçilir. Koordinatlarından, koordinatları dönüştüren matematiksel bir dönüşüm türetilebilir. Yazılım, ölçülen verilerde hata veya gürültü olan bir denklem sistemine en uygun çözümü sağlayan en küçük kareler yöntemini kullanır. Buna Procrustes Problemi13 denir ve tekil değer ayrıştırması kullanılarak çözülür. Yöntem güvenilir ve sağlamdır, çünkü benzersiz ve iyi tanımlanmış bir çözüme yol açar (en az üç doğrusal olmayan işaretleyici verilirse). Altı serbest parametre hesaplanır: üçü öteleme için ve üçü döndürme için. Aşağıda, teknik olarak bir döndürme matrisi ve öteleme vektöründen oluşmasına rağmen dönüşüm matrisi terimini kullanacağız.
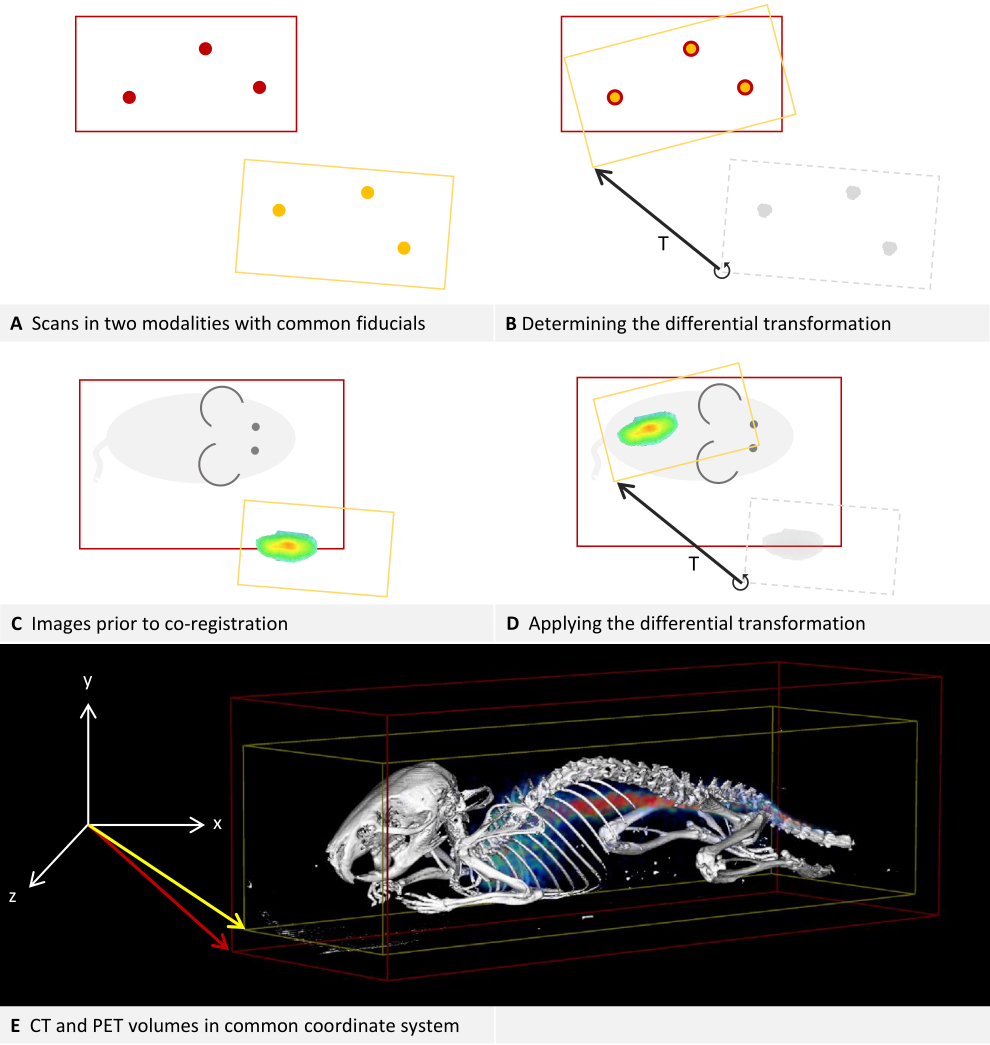
Her görüntüleme cihazının kendi koordinat sistemi vardır ve yazılım bunları hizalamak için diferansiyel bir dönüşüm hesaplar. Şekil 2A,B, diferansiyel dönüşümün nasıl belirlendiğini, Şekil 2C,D ise nasıl uygulandığını açıklar. Şekil 2E'de CT ve PET'in füzyonu ile örnek görüntüde gösterildiği gibi, her iki modalitenin görüntüleri farklı boyutlara sahip olabilir ve bunları süreçte tutabilir.

Şekil 2: Diferansiyel dönüşüm. (A-D) 2D'ye basitleştirilmiş. Diğer modaliteler için geçerli olsa da, bu örnek için modalitelerin CT ve PET olduğu varsayılmaktadır. (Bir,C) Kırmızı sınırlayıcı kutuya sahip bir CT görüntüsü koordinat sistemine yerleştirilir. Aynı koordinat sistemine uygulandığında, sarı bir sınırlayıcı kutuya sahip PET görüntüsü sapma göstererek konumlandırılır. (B) Hem CT hem de PET'te bulunabilen referans belirteçleri kullanılarak, diferansiyel bir dönüşüm T belirlenebilir. Bu ok ile sembolize edilir. Diferansiyel dönüşüm matrisi saklanır. (D) Önceden kaydedilmiş diferansiyel dönüşüm matrisi T daha sonra her PET görüntüsüne uygulanabilir. Bu, meta verilerdeki özgün dönüştürmenin yerini alan yeni bir dönüştürmeyle sonuçlanır. (E) Bir PET görüntüsü ile kaynaştırılmış bir CT görüntüsü. Her iki görüntünün meta verilerindeki dönüşümler aynı koordinat sistemine başvurur. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Yöntem ve gereksinimler
Sunulan yöntem için, her iki modalitede de görülebilen belirteçleri içeren bir fantom her iki cihazda da taranır. Daha sonra, iki modalite arasındaki diferansiyel dönüşümü hesaplamak için bu referansları önerilen yazılımda işaretlemek yeterlidir. Diferansiyel dönüşüm, her bir cihaz çifti için ayrı ayrı oluşturulmalıdır. Kaydedilebilir ve daha sonra herhangi bir yeni görüntüye uygulanabilir, böylece sonraki taramalarda referans işaretleyicilere olan ihtiyacı ortadan kaldırır. Görüntünün başka bir cihazın koordinat sistemine son olarak yerleştirilmesi yine bir dönüşüm olarak tanımlanabilir ve görüntünün meta verilerinde saklanabilir ve oradaki orijinal dönüşümün yerini alabilir.
Bu yöntem için dört gereksinim formüle edilebilir: (1) Multimodal fantom: Her iki modalitede de görülebilen belirteçleri içeren bir fantom mevcut olmalıdır. Ticari olarak geniş bir fantom yelpazesi elde edilebilir ve fantom yapımı için 3D baskının kullanımı, radyoizitopların15 dahil edilmesi de dahil olmak üzere geniş çapta tanımlanmıştır14. Aşağıdaki örneklerde kullanılan fantomlar Malzeme Tablosu'nda listelenmiştir. En az üç doğrusal olmayan nokta gereklidir16. İşaretleyiciler, uygun bir izleyici ile doldurulabilen boşluklar, her modalitede kolayca tespit edilebilen bir malzemeden yapılmış küçük nesneler veya her iki modalitede de tanımlanabildikleri sürece fantomun kendisindeki delikler, kesikler veya kenarlar olabilir. (2) Multimodal taşıyıcı: Her iki cihazda da tekrarlanabilir bir konumda sabitlenebilen fare yatağı gibi bir taşıyıcıya ihtiyaç vardır. İdeal olarak, hatalardan kaçınmak için ters konumda kullanmak mümkün olmamalıdır. Taşıyıcı, in vivo görüntüleme için özellikle önemlidir, çünkü sedasyonlu bir hayvanın pozisyonunu değiştirmeden bir görüntüleme cihazından diğerine taşınması gerekir. Deneyimlerimize dayanarak, sedasyonlu farelerin, içbükey şekilli bir fare yatağına kıyasla düz bir fare yatağındaki konumlarını değiştirme olasılığı daha yüksektir. Ek olarak, hareketi en aza indirmek için farenin kaval kemiğini tutmak için özel bir 3D baskılı aparat daha önce önerilmişti17. (3) Kendi kendine tutarlılık: Her görüntüleme cihazı, yeniden yapılandırılmış hacmin referans çerçevesinde tekrarlanabilir ve tutarlı bir şekilde döndürülmesini ve ötelenmesini sağlamalıdır. Bu aynı zamanda, yalnızca küçük bir bölge tarandığında tüm cihaz için bir koordinat sisteminin korunduğu anlamına gelir. Bir görüntüleme cihazının kendi kendine tutarlılığını test etmek protokolün bir parçasıdır. (4) Yazılım desteği: Önerilen yazılım, cihaz tarafından sağlanan yeniden yapılandırılmış hacimle depolanan meta verileri (voksel boyutu, çeviri, yönlendirme) yorumlayabilmelidir. Birim DICOM, NIfTI, Analiz veya GFF dosya biçiminde olabilir. Çeşitli dosya formatlarına genel bir bakış için, Yamoah et al.12'ye bakınız.
İki modalitenin birlikte kaydı açıklanırken, prosedür aynı zamanda üç veya daha fazla modaliteye de uygulanabilir, örneğin, iki modalitenin bir referans modalitesine birlikte kaydedilmesi yoluyla.
Protokol
Protokolün yazılım adımları, "analiz yazılımı" olarak adlandırılan Imalytics Preclinical'de gerçekleştirilecektir (bkz. Hacimleri "altlık" ve "kaplama" olarak adlandırılan iki farklı katman olarak yükleyebilir18. Altlık oluşturma genellikle bir segmentasyonun dayanabileceği anatomik olarak ayrıntılı bir veri setini incelemek için kullanılır; Saydam bir şekilde işlenebilen kaplama, görüntü içindeki ek bilgileri görselleştirmek için kullanılabilir. Genellikle, izleyici tabanlı bir modalitenin sinyal dağılımı kaplamada görüntülenir. Protokol, seçilen katmanın birkaç kez değiştirilmesini gerektirir. Bu, düzenleme işlemlerinden etkilenecek olan katmandır. Seçili olan katman, fare ve pencere simgeleri arasındaki üst araç çubuğundaki açılır listede görünür. Altlık ve kaplama arasında geçiş yapmak için sekme tuşuna basabilir veya doğrudan açılır listeden istenen katmanı seçebilirsiniz. Protokol, daha sonra içerik üreten görüntüleme için kullanılan "üretim taramaları"nın aksine, "kalibrasyon taramaları" olarak kendi kendine tutarlılığı test etmek ve diferansiyel bir dönüşümü belirlemek için kullanılan taramalara (veya görüntülere) atıfta bulunacaktır. Protokolde kullanılan modaliteler CT ve PET'tir. Bununla birlikte, daha önce açıklandığı gibi, bu yöntem hacimsel veri elde edebilen tüm klinik öncesi görüntüleme modaliteleri için geçerlidir.
1. Taşıyıcının ve fantomun montajı
NOT: Fantomun sabitlenebileceği uygun bir multimodal taşıyıcı, örneğin bir fare yatağı mevcut olmalıdır. Bu derlemeyle ilgili öneriler, sık karşılaşılan sorunlar ve sorun giderme için tartışmaya bakın.
- Fantomdaki referans işaretleyicileri hazırlayın.
NOT: Gerekli özel hazırlık, kullanılan modaliteye ve izleyiciye bağlı olarak değişir. Örneğin, birçok MRI fantomu suyla doldurulması gereken boşluklar içerirken, başka bir örnek olarak PET, radyoaktif bir izleyici gerektirir. - Fantomu taşıyıcıya yerleştirin ve görüntü kalitesini bozmayacak bant gibi bir malzeme ile sabitleyin.
NOT: Fantom için gereksinimler Giriş bölümünde ayrıntılı olarak açıklanmıştır.
2. Kalibrasyon taramalarının yapılması ve kendi kendine tutarlılığın kontrol edilmesi
NOT: Bu adımın her görüntüleme cihazı için tekrarlanması gerekir.
- Farklı görüş alanlarına sahip iki tarama elde edin.
- Taşıyıcıyı görüntüleme cihazına yerleştirin. Güvenilir ve tekrarlanabilir bir şekilde yerleştirildiğinden emin olun.
- Tüm fantomu kaplayan geniş bir görüş alanı kullanarak cihaz üreticisinin talimatlarına göre tarayın. Bu görüntü, aşağıdaki adımlarda "Görüntü A" olarak anılacaktır.
NOT: Bu tarama aynı zamanda diferansiyel dönüşüm matrisini hesaplamak için de kullanılacağından, tüm referansların dahil edilmesi önemlidir. - Taşıyıcıyı görüntüleme cihazından çıkarın ve yerine takın.
NOT: Bu adım, taşıyıcının cihazdaki yerleşiminin güvenilir olmasını sağlar. - Görüntüleme cihazı sınırlı bir görüş alanını desteklemiyorsa, yani her zaman tüm görüş alanını tarıyorsa, makul bir şekilde kendi kendine tutarlılık varsayılabilir. Doğrudan 3. adıma geçin.
- Cihaz üreticisinin talimatlarına göre, bu sefer önemli ölçüde daha küçük bir görüş alanı kullanarak ikinci bir tarama gerçekleştirin. Bu görüntü aşağıdaki adımlarda "Görüntü B" olarak adlandırılacaktır.
NOT: Farklı görüş alanlarına sahip iki tarama yapmak önemlidir. Görüş alanının tam konumu, hayalet yapılar veya mümkün olduğunca çok sayıda referans gibi bazı görünür bilgiler dahil edildiği sürece, görüntü B için kritik değildir.
- Altlığı yükleyin.
- Analiz yazılımını açın.
- Görüntü A'yı altlık olarak yükleyin: Altlık > Altlık > Altlık Yükle Menü Dosyası. Aşağıdaki iletişim kutusunda, görüntü dosyasını seçin ve aç'a tıklayın.
- 3D görünüm yoksa, etkinleştirmek için [Alt + 3] tuşlarına basın.
- Pencerelemeyi ayarlayın: [Ctrl + W] tuşlarına basın ve aşağıdaki iletişim kutusundaki sol ve sağ dikey çubukları ayarlayın, böylece hayalet veya modaliteye bağlı olarak izleyiciler net bir şekilde ayırt edilebilir. İletişim kutusunu kapatmak için Tamam'a tıklayın.
- Kaplamayı yükleyin.
- Görüntü B'yi kaplama olarak yükle: Menü Dosya > Kaplama > Kaplama yükle. Aşağıdaki iletişim kutusunda, görüntü dosyasını seçin ve aç'a tıklayın.
- Oluşturma yöntemini değiştirin: Menü 3D İşleme > Kaplama modu > Iso oluşturmayı kontrol edin.
NOT: PET veya SPECT gibi izleyici tabanlı modaliteler genellikle hacim oluşturma ile görüntülense de, bu durumda Iso oluşturma, konumların daha kolay karşılaştırılmasına olanak tanır. Alt katman, varsayılan olarak Iso işlemede açıldı. - Sınırlayıcı kutuların görünümünü etkinleştirin: Menü Görünümü > Sembolleri göster > Sınırlayıcı kutuyu göster > Altlık sınırlayıcı kutuyu göster; Menü Görünümü > Sembolleri göster > Sınırlayıcı kutuyu göster > Kaplama sınırlayıcı kutuyu göster.
- Görüntü hizalamasını kontrol edin.
- Fare işaretçisini 3B görünümün üzerine getirin ve her iki sınırlayıcı kutu da tamamen görünür olacak şekilde görünümü yakınlaştırmak için [Ctrl + fare tekerleği] tuşlarını kullanın. Görünümü döndürmek için fare işaretçisini hareket ettirirken [Alt + sol fare düğmesi] tuşunu basılı tutun.
- Seçili katmanı kaplamaya geçirin.
- Pencereyi ve renk tablosunu ayarlama: [Ctrl + w] tuşlarına basın. Aşağıdaki iletişim kutusunun solundaki açılan listede Sarı'yı seçin. Aşağıdaki iletişim kutusundaki aralığı, altlık için seçilen benzer bir aralıkla ayarlayın ve ardından, sarı görüntü oluşturma yalnızca beyaz işlemenin içinde görünene kadar ayarı küçük adımlarla değiştirin. İletişim kutusunu kapatmak için Tamam'a tıklayın.
NOT: Görüntü A'nın (altlık) görüntüsü artık beyaz renkte gösterilmiş ve kırmızı bir sınırlayıcı kutu ile çevrelenmiştir. Görüntü B'nin (kaplama) oluşturulması sarı renkle gösterilir ve sarı bir sınırlayıcı kutu ile çevrelenir. - Görüntüleme cihazının ve fantomu yerleştirme yönteminin gerektiği gibi kendi kendine tutarlı olup olmadığını görsel olarak kontrol edin. Fantom (veya modaliteye bağlı olarak izleyiciler) altlık ve kaplamada tamamen hizalanmalıdır. Sarı işleme, beyaz işlemenin bir alt kümesi olmalıdır.
NOT: Sarı sınırlayıcı kutu daha küçük olmalı ve kırmızı sınırlayıcı kutu içinde olmalıdır. Görsel örnekler için Temsili Sonuçlar bölümüne bakın. Hizalama eşleşmiyorsa, yaygın yerleşim sorunları ve sorun giderme için tartışmaya bakın.
3. Diferansiyel dönüşümün hesaplanması
- Her iki modalitenin görüntülerini yükleyin.
- Analiz yazılımını açın.
- CT görüntüsünü A'yı altlık olarak yükleyin: Altlık > Menü Dosyası > Altlık Yükle. Aşağıdaki iletişim kutusunda, görüntü dosyasını seçin ve aç'a basın.
- PET görüntüsünü A kaplama olarak yükleyin: Menü Dosyası > Yer Paylaşımı > Yer Paylaşımını Yükle. Aşağıdaki iletişim kutusunda, görüntü dosyasını seçin ve aç'a basın.
- Birden çok dilim görünümü gösterme: Eksenel, sagital ve koronal dilim görünümlerini göstermek için [Alt + A], [Alt + S] ve [Alt + C] tuşlarına basın.
NOT: Teknik olarak, referansları bulmak için bir uçak yeterli olsa da, tüm uçakların aynı anda görüntülenmesi daha iyi yönlendirme ve daha hızlı navigasyon sağlar.
- İşaretleyici tabanlı füzyon gerçekleştirin.
NOT: Adım 3.2 ve adım 3.3, altlık ve kaplamayı hizalamak için alternatif yöntemlerdir. Önce adım 3.2'yi deneyin çünkü yeniden üretilmesi daha kolaydır ve potansiyel olarak daha doğrudur. Adım 3.3, yeterli işaretçi açıkça ayırt edilemiyorsa bir geri dönüştür.- Görünümü yalnızca altlığı gösterecek şekilde değiştirin: Katman Görünürlüğü > Katman Ayarları > Menü Görünümü > kaplamanın işaretini kaldırın; Katman Ayarları > Katman Görünürlüğü > Menü Görünümü > altlığı kontrol edin.
- Seçili katmanı altlığa geçirin.
- Gerekirse, pencereyi ayarlayın: Referansları daha iyi görmek için [Ctrl + W] tuşlarına basın ve aşağıdaki iletişim kutusunda sol ve sağ dikey çubukları ayarlayın. İletişim kutusunu kapatmak için Tamam'a tıklayın.
- Sol taraftaki dikey araç çubuğundaki işaretçi sembolüne tıklayarak "işaretçi oluştur" fare eylem modunu etkinleştirin. Fare işaretçisi bir işaret sembolü gösterir.
- Hayaletin her bir referansı için performans sergileyin: Bir fiducial'a gidin. Bu amaçla, fare imlecini bir düzlem görünümünün üzerine getirin ve düzlemleri dilimlemek için [Alt + fare tekerleği] tuşlarını kullanın. Fare işaretçisini güvenin ortasına getirin ve sol tıklayın.
- Bu, yazılımın ardışık sayılardan oluşan bir ad önereceği bir iletişim kutusu açar. Önerilen adı koruyun, örneğin "Marker001" ve işaretçiyi kaydetmek için Tamam'a tıklayın.
NOT: Kaplama için aynı işaretçi adlarını tekrar kullanırsanız, farklı adlar kullanmak mümkündür.
- Bu, yazılımın ardışık sayılardan oluşan bir ad önereceği bir iletişim kutusu açar. Önerilen adı koruyun, örneğin "Marker001" ve işaretçiyi kaydetmek için Tamam'a tıklayın.
- Kaplamayı göstermek için görüntüleme ayarlarını yapın: Katman Görünürlüğü > Katman Görünümü > Menü Görünümü > kaplamayı kontrol edin.
NOT: Her iki modalitede de oryantasyonda kalmak ve doğru işaretleyiciyi belirlediğinizden emin olmak yararlı olduğundan, altlığın görünümünü aktif tutmanız önerilir. İki modalite çok senkronize değilse veya kaplama kafa karıştırıcıysa, devre dışı bırakın: Katman Görünürlüğü > Katman Ayarları > Menü Görünümü > altlığın işaretini kaldırın. - Seçili katmanı kaplamaya geçirin.
- Pencerelemeyi ayarlayın: Referans işaretleri net bir şekilde görünmüyorsa, [Ctrl + W] tuşlarına basın ve aşağıdaki iletişim kutusundaki sol ve sağ dikey çubukları, referansların mümkün olan en iyi şekilde yerleştirilebilmesi için ayarlayın. İletişim kutusunu kapatmak için Tamam'a tıklayın.
- Hayaletin her bir referansı için performans sergileyin: Bir fiducial'a gidin. Bu amaçla, fare imlecini bir düzlem görünümünün üzerine getirin ve düzlemleri dilimlemek için [Alt + fare tekerleği] tuşlarını kullanın. Fare işaretçisini güvenin ortasına getirin ve sol tıklayın.
- Bu, yazılımın ardışık sayılardan oluşan bir ad önereceği bir iletişim kutusu açar. Önerilen adı koruyun ve işaretçiyi kaydetmek için Tamam'a tıklayın.
NOT: Altlık ve kaplamadaki yazılım işaretleyicilerini eşleştirmek için aynı ada sahip olmak önemlidir. Bu, önerilen adları korursanız ve her iki modalitede de işaretçileri oluşturmak için aynı sırayı kullanırsanız sağlanır. Adları değiştirirseniz, eşleştiklerinden emin olun.
- Bu, yazılımın ardışık sayılardan oluşan bir ad önereceği bir iletişim kutusu açar. Önerilen adı koruyun ve işaretçiyi kaydetmek için Tamam'a tıklayın.
- Her iki katmanın görünümlerini etkinleştirin: Katman Ayarları > Menü Görünümü > Katman Görünürlüğü > altlığı kontrol edin; Katman Görünürlüğü > Katman Görünümü > Katman Görünümü > kaplamayı kontrol edin.
- Altlık ve kaplama işaretleyicilerini hizalayın: Menü Fusion > Altlık için kaplamayı kaydedin > Döndürme ve öteleme ( işaretçiler) hesaplama. Aşağıdaki iletişim kutusunda füzyon kalıntısı gösterilmektedir. Bu ölçümü not edin ve tamam'a tıklayın.
- Hizalamanın sonucunu kontrol edin: Altlık ve kaplamadaki işaretler görsel olarak eşleşmelidir. Sorun giderme ve füzyon kalıntısı ile ilgili doğrulukla ilgili notlar için tartışma bölümünü kontrol edin.
NOT: Kaplamanın dönüşümü değiştirildi. Yeni kaplama dönüşümünün ayrıntılarını görüntülemek için [Ctrl + I] tuşlarına basın.
- İşaretleyici tabanlı füzyon mümkün değilse, etkileşimli füzyon gerçekleştirin. Adım 3.2 tamamlanırsa, doğrudan adım 3.4'e geçin.
- Her iki katmanın görünümlerini etkinleştirin: Katman Ayarları > Katman Görünümü > Katman Görünürlüğü > altlığı kontrol edin; Katman Ayarları > Katman Görünürlüğü > Menü Görünümü > kaplamayı kontrol edin.
- Sol taraftaki dikey araç çubuğundaki sembole tıklayarak "etkileşimli görüntü füzyonu" fare modunu etkinleştirin. Sembol, ortak merkezde bir nokta bulunan üç ofset elipsten oluşur. Fare işaretçisi şimdi bu sembolü gösterir.
- Fare modu için ayarlar araç çubuğunun, kalıcı araç çubuğunun altındaki üst alanda göründüğünden emin olun. Altlık, kaplama ve segmentasyon için üç onay kutusu vardır. Kaplamayı kontrol edin. Altlık ve segmentasyonun işaretini kaldırın.
- Kaplamayı altlıkla etkileşimli olarak hizalayın: Altlık ve kaplama mümkün olan en iyi şekilde hizalanana kadar farklı görünümlerde döndürmeler ve ötelemeler gerçekleştirin:
- Döndürme: Fare işaretçisini bir görünümün kenarına yakın bir yere getirin (eksenel, koronal veya sagital); Fare işaretçisi simgesi artık bir okla çevrelenmiştir. Kaplamayı döndürmek için farenin sol düğmesini basılı tutun ve fareyi hareket ettirin.
- Çeviri: Fare işaretçisini görünümün merkezine yakın bir yere getirin. Fare işaretçisi daire içine alınmamış. Kaplamayı hareket ettirmek için farenin sol düğmesini basılı tutun ve fareyi hareket ettirin.
- Diferansiyel dönüşümü oluşturun ve kaydedin: Menü Füzyonu > Kaplama dönüşümü > Diferansiyel dönüşümü oluşturun ve kaydedin. Aşağıdaki iletişim kutusunda, orijinal kaplama dosyasını seçin ve Aç'a tıklayın. İkinci iletişim kutusunda, diferansiyel dönüştürme için bir dosya adı girin ve Kaydet'e basın.
NOT: Yazılım, orijinal dönüşümü okumak ve ardından diferansiyel dönüşümü hesaplamak için orijinal kaplama dosyasına ihtiyaç duyar. Diferansiyel dönüşüm matrisini, kullanılan görüntüleme aygıtlarını belirten bir dosya adıyla kaydetmenizi öneririz.
4. Üretim görüntüleme
- Her iki görüntüleme cihazında da tarayın.
- Numuneyi (örn. sedasyonlu bir laboratuvar hayvanı) taşıyıcıya sabitleyin.
NOT: Numunenin taşıyıcı içindeki konumunun iki tarama arasında değişmediğinden emin olmak önemlidir. - Taşıyıcıyı CT cihazına yerleştirin. Taşıyıcıyı, kalibrasyon taraması sırasında yapıldığı gibi yerleştirdiğinizden emin olun.
- Cihaz üreticisinin talimatlarına göre tarayın.
- Taşıyıcıyı PET cihazına yerleştirin. Taşıyıcıyı, kalibrasyon taraması sırasında yapıldığı gibi yerleştirdiğinizden emin olun.
- Cihaz üreticisinin talimatlarına göre tarayın.
- Numuneyi (örn. sedasyonlu bir laboratuvar hayvanı) taşıyıcıya sabitleyin.
- Diferansiyel dönüşümün uygulamasını gerçekleştirin.
- Analiz yazılımını açın.
- CT dosyasını altlık olarak yükleyin: Altlık > Altlık > Altlık Menüsü Yükleyin. Aşağıdaki iletişim kutusunda, CT görüntü dosyasını seçin ve Tamam'a basın.
- PET dosyasını kaplama olarak yükle: Menü Dosyası > Kaplama > Kaplama yükle. Aşağıdaki iletişim kutusunda, PET görüntü dosyasını seçin ve Tamam'a basın.
- Her iki katmanın görünümlerini etkinleştirin: Katman Ayarları > Menü Görünümü > Katman Görünürlüğü > altlığı kontrol edin; Katman Ayarları > Katman Görünümü > Katman Görünürlüğü > kaplamayı kontrol edin.
- Önceden kaydedilmiş diferansiyel dönüştürme matrisini yükleyin ve uygulayın: Menü > Fusion > Kaplama dönüşümü > Dönüşümü yükle ve uygula. Kalibrasyon işleminde kaydettiğiniz diferansiyel dönüşüm matrisini içeren dosyayı seçin ve aç'a basın.
NOT: Bu adım, kaplamanın meta verilerini değiştirir. - Değiştirilen kaplamayı kaydetme: Dosya > Kaplaması > Kaplamayı kaydet menü >. Aşağıdaki iletişim kutusunda bir ad girin ve kaydet'e tıklayın.
NOT: Değiştirilmemiş orijinal verilerin saklanması ve bu nedenle kaplamanın yeni bir adla kaydedilmesi önerilir.
Sonuçlar
Şekil 3 ve Şekil 4 , BT'de görülebilen ve bu durumda SPECT için bir izleyici ile doldurulmuş boru şeklinde boşluklar içeren bir fantom örnekleri sunmaktadır. Kullanılan hayalet ve izleyici, Malzeme Tablosu'nda listelenmiştir.
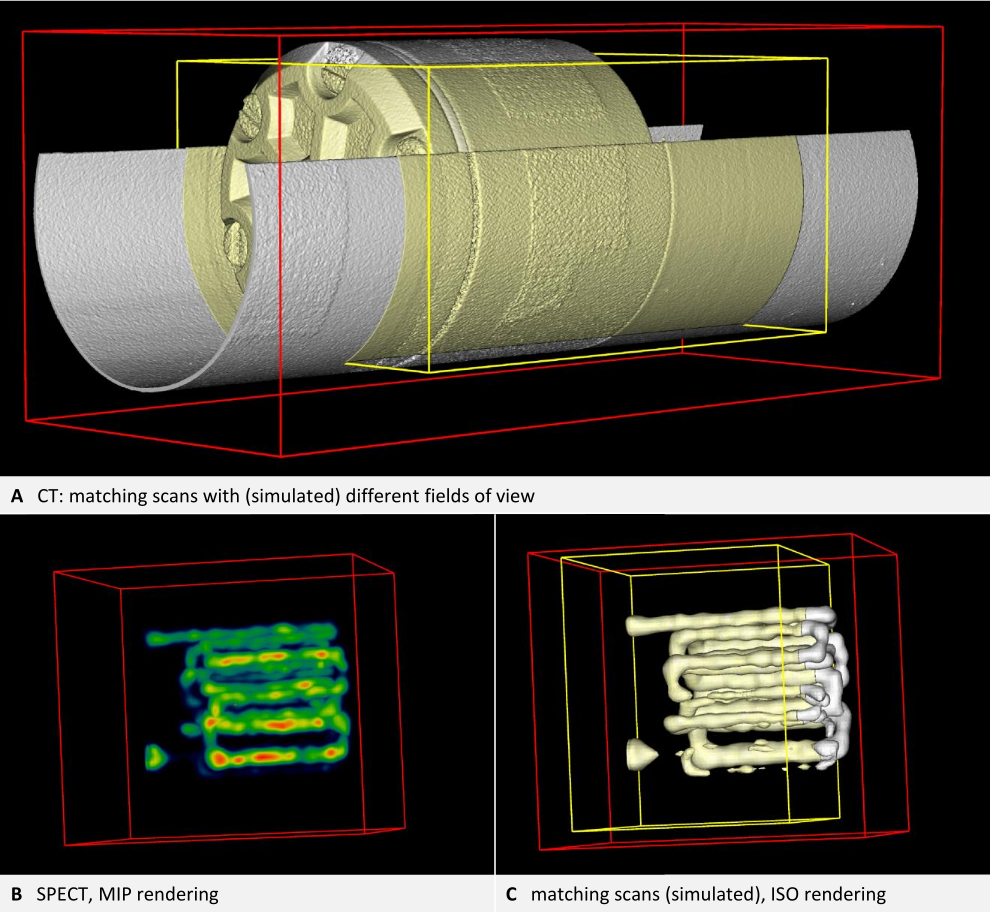
Protokolün 2. adımı, kalibrasyon taramalarını ana hatlarıyla belirtir ve her bir görüntüleme cihazının kendi tutarlılığını doğrular. Farklı görüş alanlarına sahip iki taramadan elde edilen işlemeler her cihaz için uyumlu olmalıdır. Sonuç olarak, sarı renkle gösterilen B görüntüsü, beyaz ile gösterilen A görüntüsünün bir alt kümesi olmalıdır. CT kullanan bir örnek Şekil 3A'da sunulmuştur. PET veya SPECT gibi izleyici tabanlı modaliteler tipik olarak hacim oluşturma ile görselleştirilir (Şekil 3B). Bununla birlikte, Iso oluşturma, daha kolay konum karşılaştırmalarını kolaylaştırır. Bu nedenle protokol, kullanıcılara, kullanılan modaliteden bağımsız olarak, altlığı ve kaplamayı Iso işlemeye geçirmeleri talimatını verir. Bu nedenle, SPECT örneğinde, sarı oluşturma aynı zamanda beyaz işlemenin bir alt kümesi olmalıdır (Şekil 3C). Her durumda, sarı sınırlayıcı kutu daha küçük olmalı ve kırmızı sınırlayıcı kutunun içine yerleştirilmelidir. Hizalama eşleşmezse, tartışma yaygın yerleşim sorunlarını vurgular ve sorun giderme önerileri sağlar.
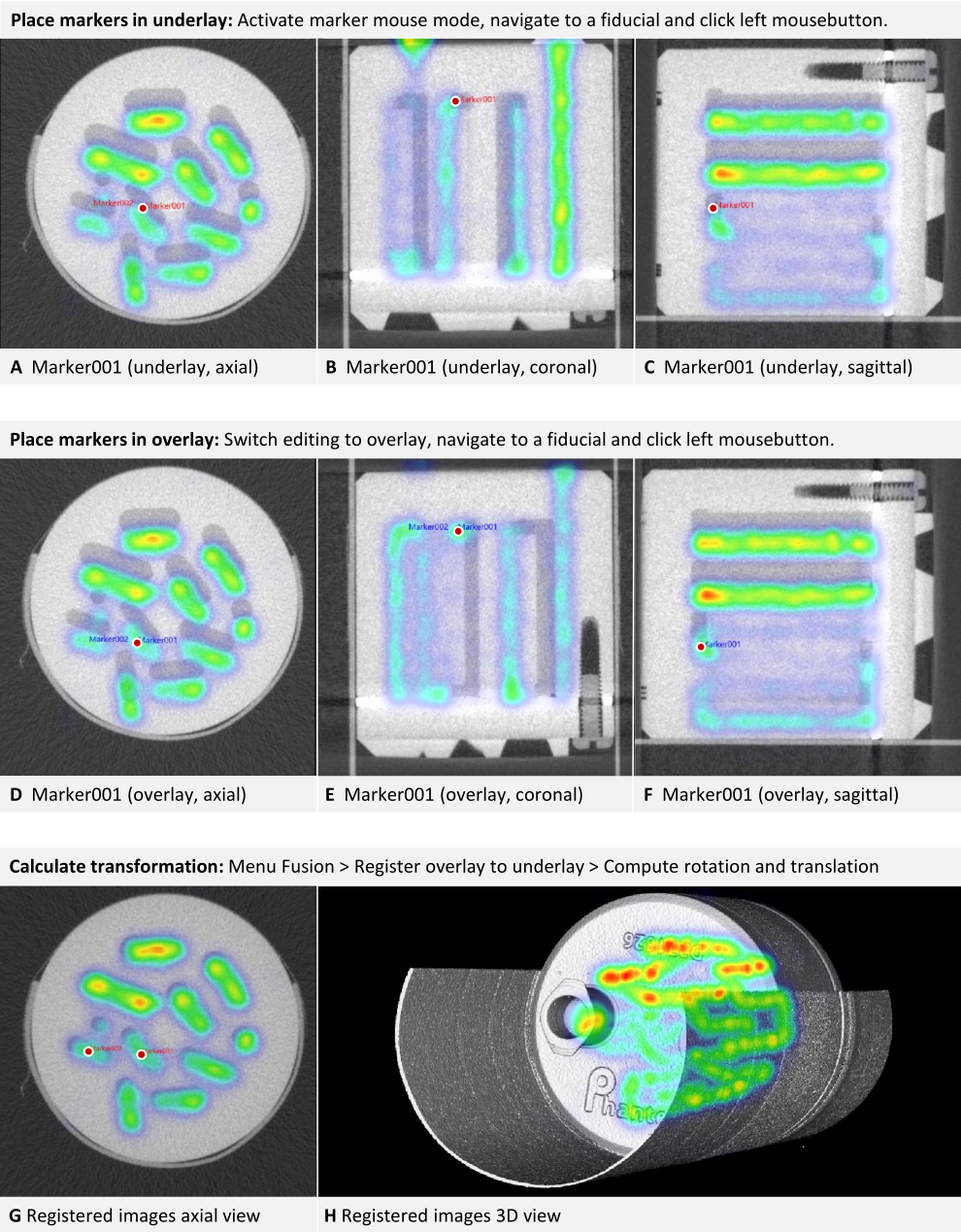
Protokolün 3. adımı, referans belirteçleri kullanılarak iki modalite arasındaki diferansiyel dönüşümün nasıl belirleneceğini açıklar. İzleyici tabanlı modalitelerde izleyici bir hacim olarak mevcut olduğundan, kullanıcının (nokta şeklinde) bir referans işaretleyici olarak kullanmak için uygun noktaları belirlemesi gerekir. Şekil 4'te, fantomun bir BT görüntüsü altlık olarak yüklenir ve bir SPECT görüntüsü altlık olarak yüklenir. Fantomun içindeki bir tüp eğrisinin merkezi, eksenel, koronal ve sagital görünümlerde Şekil 4A-C'de gösterildiği gibi, BT altlığı için referans bir belirteç olarak seçilir. İlgili noktanın, eksenel, koronal ve sagital görünümlerde Şekil 4D-F'de gösterilen kaplamada işaretlenmesi gerekir. Yazılım artık diferansiyel dönüşümü hesaplayabilir ve kaplamaya uygulayabilir. Bu, Şekil 4G,H'de gösterildiği gibi her iki modalitedeki belirteçleri hizalar.

Şekil 3: Öz tutarlılığı gösteren resimler. (A) CT hacmi. Protokolün 2.4 adımı, görüntü hizalamasının kontrol edilmesini gerektirir. Protokoldeki adımlara göre, altlık beyaz olarak gösterilirken, kaplama ve kaplamanın sınırlayıcı kutusu sarı olarak işlenir. Her iki katman da hizalıdır (burada, ikinci tarama, ilk taramanın kırpılmış bir kopyası ile simüle edilir). (B) İzleyici dolgulu tüplerle fantomun SPECT görüntülemesi. NIH renk tablosu ile hacim oluşturma. (C) ISO oluşturmada SPECT görüntüsü. Alt tabaka beyaz olarak gösterilirken, kaplamanın kaplaması ve sınırlayıcı kutusu sarı olarak gösterilir. Her iki katman da hizalıdır (burada, ikinci tarama, ilk taramanın kırpılmış bir kopyası ile simüle edilir). Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 4: CT ve SPECT görüntülerinde işaretleyicilerin yerleştirilmesi. Fantomun bir BT görüntüsü altlık olarak yüklenir. Bir SPECT görüntüsü bir kaplama olarak yüklenir ve NIH renk tablosu kullanılarak oluşturulur. (A-C) Protokolün 3.2 adımı, altlığa işaretleyicilerin yerleştirilmesini gerektirir. Fantomun içindeki bir tüp eğrisinin merkezi referans olarak seçilir ve eksenel, koronal ve sagital görünümlerde kırmızı bir nokta ile gösterildiği gibi Marker001 oraya yerleştirilir. (D-F) Eşleşen işaretçi kaplamaya yerleştirilir. (G) Dönüşümden sonra eksenel görünüm. (H) Kaynaşmış modalitelerin 3D görünümü. Maksimum yoğunluklu projeksiyon oluşturma, SPECT izleyiciyi fantom içinde görünür kılmak için kullanılır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Tartışmalar
Üretim taramaları için referans belirteçleri gerektirmeyen çok modlu görüntü ortak kaydı için bir yöntem sunulmaktadır. Fantom tabanlı yaklaşım, iki görüntüleme modalitesinin koordinat sistemleri arasında diferansiyel bir dönüşüm oluşturur.
Füzyon kalıntısı ve diferansiyel dönüşümün doğrulanması
Diferansiyel dönüşümü hesapladıktan sonra, yazılım, dönüşümün kök ortalama kare hatası19'u temsil eden milimetre cinsinden bir füzyon kalıntısı görüntüler. Bu kalıntı, voksel boyutunun büyüklük sırasını aşarsa, veri kümelerini genel sorunlar için incelemeniz önerilir. Bununla birlikte, tüm görüntülerde hafif bozulmalar olduğundan, kalıntı keyfi olarak küçük olamaz; yalnızca kullanılan işaretleyicilerin uyumunu yansıtır. Örneğin, üç işaretleyici ile ortak kayıt, aynı veri kümelerinde iyi dağıtılmış dört işaretleyici içeren bir dönüştürmeden daha küçük bir kalıntı ile sonuçlanabilir. Bunun nedeni, daha az referans kullanıldığında belirteçlerin kendilerinin aşırı takılabilmesidir. Tüm veri kümesindeki doğruluk, daha fazla sayıda işaretçi ile artar.
Yöntemin nicel doğruluğu, kullanılan spesifik cihaz çiftine bağlıdır. İki cihazın koordinat sistemleri arasındaki hesaplanan diferansiyel dönüşüm, aşağıdaki adımlar izlenerek doğrulanabilir: Protokolün 4. adımına bağlı kalarak, ancak tekrar "örnek" olarak referans işaretleyicili fantomu kullanarak. Fantomu herhangi bir konuma yerleştirmek, diferansiyel dönüşümü tahmin etmek için kullanılandan farklı olduğundan emin olmak. Varsa, ilgili modalitelere uygun farklı bir fantom kullanmak da mümkündür. Ardından, iki modaliteyi hizalamak için daha önce belirlenen diferansiyel dönüşümü (adım 4.2.5) uygulayın. Ardından, protokolün 3.2 adımına göre her iki modaliteden görüntülere işaretçiler yerleştirin. Bu işaretleyiciler için füzyon kalıntısını hesaplamak için, Kalıntı Skoru Göstermek > Altlık Oluşturmak için Füzyon > Kaplama Kaydet Menüsüne tıklayın.
Artık hata, sinyalin ortalama yanlış yerleştirilmesini tanımlar ve voksel boyutu sırasına göre olmalıdır. Somut kabul eşikleri uygulamaya bağlıdır ve görüntüleme sistemlerinin sertliği ve doğruluğu gibi çeşitli faktörlere bağlı olabilir, ancak aynı zamanda görüntü rekonstrüksiyon artefaktlarından da etkilenebilir.
Öz tutarlılık sorunlarını giderme
Genellikle, kendi kendine tutarlılık ile ilgili zorluklar güvenilmez yerleşimden kaynaklanır. Yaygın bir hata, taşıyıcıyı yanal olarak ters konuma yerleştirmektir. İdeal olarak, görüntüleme cihazına yalnızca bir yönde mekanik olarak yerleştirilmelidir. Bu mümkün değilse, kullanıcı için anlaşılır işaretler eklenmelidir. Diğer bir sık karşılaşılan sorun, uzunlamasına eksende hareket olasılığıdır ve bu da eksenel konumlandırmayı güvenilmez hale getirir. Fare yatağını yerine sabitlemek için bir ucuna takılabilen bir ara parça kullanılması önerilir. Örneğin, özel ara parçalar, 3D yazdırılarak hızlı ve kolay bir şekilde oluşturulabilir. Bununla birlikte, bazı cihazlar değişen görüş alanlarıyla kendi kendine tutarlılık sağlayamaz. Bu gibi durumlarda, uyumsuzluğu onaylaması ve gelecekteki bir güncellemede potansiyel olarak ele alması gereken satıcıyla iletişime geçilmesi tavsiye edilir. Aksi takdirde, kalibrasyon ve üretim görüntülemesi de dahil olmak üzere tüm taramalar için aynı görüş alanı korunursa yöntem güvenilir kalır.
Sapma yerleşimine sahip bazı üretim taramaları için, yeterli taşıyıcı yapısı fark edilebiliyorsa, kalibre edilmiş konuma dönüşüm mümkündür. İn vivo görüntüleme için, sedasyonlu hayvan tek bir taşıyıcıda kalmalıdır ve her iki cihaza da güvenli bir şekilde uyan tek bir taşıyıcı oluşturmak her zaman mümkün değildir. Genellikle, izleyici tabanlı bir modalite için bir fare yatağı kullanılır ve daha sonra yerleştirme bir CT cihazına doğaçlama yapılır. Örneğin, Şekil 5A'da, mekanik kısıtlamalar nedeniyle bir CT fare yatağının üzerine bir MPI fare yatağı yerleştirildi. Eksenel boşluk ve yuvarlanma olasılığı bu konumlandırmayı güvenilmez hale getirir. Bu gibi durumlarda, alt fare yatağının yerini alan ve birbirine kenetlenen bir oturmaya izin veren bir adaptör tasarlanması önerilir. Örneğin, alt kısma bağlı muylular ve üst fare yatağının altındaki ek delikler kullanabilir.
Bununla birlikte, BT görüntüsünde fare yatağı algılanabildiği için mevcut görüntüler için geriye dönük düzeltme mümkündür. Protokol, kalibrasyon taramalarını ve ardından kaplamanın altlığa diferansiyel dönüşümünün hesaplanmasını gerektirir. Prosedür benzerdir, ancak aynı zamanda fare yatağı yapılarını referans olarak kullanarak her bir üretim BT taramasını kalibrasyon taramasıyla eşleştirmelidir.

Şekil 5: Yerleştirme sorunlarını giderme. (A) Bir MPI fare yatağı, bir CT fare yatağının üzerine yerleştirilmiştir. Bu nedenle, BT'deki pozisyon güvenilir bir şekilde yeniden üretilemez. Her bir BT görüntüsünü, diferansiyel dönüşümü tahmin etmek için kullanılan referans BT görüntüsüne kaynaştırarak kendi kendine tutarlılık elde edilebilir. (B-D) 2D olarak basitleştirilmiştir. (B) Her prodüksiyon BT görüntüsü bir kaplama olarak yüklenir ve BT'de görünen fare yatağının yapıları kullanılarak referans BT görüntüsüne (altlık) kaydedilir. Düzeltilmiş üretim BT görüntüsü artık referans BT ile tutarlıdır ve diferansiyel dönüşüm T ile kullanılabilir. (C) Bir fantomun referans belirteçleri kullanılarak referans BT görüntüsüne bir MPI kaplaması kaydedilir. (D) Multimodal görüntüler bir araya getirilir. Bu amaçla, her bir CT görüntüsü, bireysel diferansiyel dönüşümü ile referans pozisyonuna eşlenir. Daha sonra, MPI kaplaması, cihazın tüm görüntüleri için geçerli olan diferansiyel dönüşüm kullanılarak referans konumuna da kaydedilir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Üretim CT taramalarını kalibrasyon taramasıyla eşleştirmek için, aşağıdaki değişiklikleri içeren protokolün 3. bölümüne bakın. Netlik sağlamak için, açıklama bir CT altlığı ve MPI kaplaması örneğini kullanarak devam eder: Adım 3.1'de, CT kalibrasyon taramasını (resim A) altlık olarak ve düzeltilecek CT taramasını kaplama olarak yükleyin. MPI fare yatağının yapılarını adım 3.2 için işaretleyici olarak veya adım 3.3 için görsel referanslar olarak kullanın. Adım 3.4'ü atlayın, ancak kaplamayı kaydedin, düzeltilmiş CT hacmini temsil eder (Menü Dosyası > Yer Paylaşımı > Yer Paylaşımı Farklı Kaydetme). Sonraki iletişim kutusunda yeni bir ad girin ve kaydet'e tıklayın. Dosya > Kaplama Menüsüne > Kaplamayı Kapatma'ya giderek kaplamayı kapatın. Düzeltme gerektiren bir sonraki CT taramasını kaplama olarak yükleyin ve prosedüre protokolün 3.2 adımından devam edin. Bu adımın altında yatan kavram Şekil 5B'de gösterilmiştir.
Fare yatağı artık yakın zamanda kaydedilen tüm CT hacimlerindeki kalibrasyon taramasıyla neredeyse aynı şekilde hizalanmıştır. Standart prosedürün bir parçası olarak, kalibrasyon taraması, diferansiyel dönüşüm T kullanılarak MPI görüntülerine kaydedilir (Şekil 5C). CT görüntüsünü daha sonra MPI ile birleştirmek için her zaman düzeltilmiş CT hacmini kullanın (Şekil 5D).
Ters çevrilmiş görüntülerde sorun giderme ve ölçekleme
Burada tanıtılan kayıt yöntemi, makul ölçüde doğru görüntü kalitesini varsayar ve yalnızca döndürme ve çevirmeyi ayarlar. Ters çevrilmiş görüntüleri veya yanlış ölçeklemeyi düzeltmez. Ancak, bu iki sorun, diferansiyel dönüşümü hesaplamadan önce manuel olarak ele alınabilir.
Farklı üreticilerin veri biçimleri arasındaki tutarsızlıklar, bazı veri kümelerinin, özellikle de DICOM biçimindeki veri kümelerinin, yazılımda ters çevrilmiş olarak görüntülenmesine neden olabilir. Fantomlar ve fare yatakları genellikle simetrik olduğundan, bu sorun hemen belli olmayabilir. Tarama, Şekil 3H'deki hayalette görülen doğru yönde yükseltilmiş harfler gibi, ilgili modalitede tanınabilir harfler içerdiğinde, ters çevrilmiş görüntüleri algılamak daha kolaydır. Şekil 6'da gösterilen örnekte, CT verileri altlık olarak yüklenir ve MPI verileri kaplama olarak yüklenir. Ekli referans işaretleyicileri olan bir MPI fare yatağına yerleştirilmiş bir farenin in vivo taramasıdır. MPI fare yatağı, bir μCT fare yatağının üzerine yerleştirilmiştir (Şekil 6A). Protokole bağlı kalarak ve hem altlıktaki hem de kaplamadaki referansları tutarlı bir dönüş yönünde işaretleyerek, gözle görülür şekilde uyumsuz bir sonuç elde edilir (Şekil 6B). Bununla birlikte, daha yakından incelendiğinde, sorun tespit edilebilir. Referanslar asimetrik bir üçgen oluşturur. Eksenel görünümde üçgenin kenarları incelendiğinde (Şekil 6C, D) en kısadan ortaya ve en uzuna kadar, CT verilerinde saat yönünde bir dönüş belirgin iken, MPI verilerinde saat yönünün tersine bir dönüş görülmektedir. Bu, görüntülerden birinin yanal olarak ters çevrildiğini gösterir. Bu durumda, CT verilerinin doğru olduğunu varsayıyoruz. MPI kaplamasını düzeltmek için görüntü ters çevrilir: bunu yapmak için, seçilen katmanı kaplamaya geçirin ve Menü Düzenle > Çevir > X'i Çevir'e tıklayın. Yazılım tarafından hesaplanan diferansiyel dönüşüm, gerekli tüm dönüşleri kapsar, bu nedenle görüntü başka bir yöne çevrilmiş gibi görünse bile "Flip X" yeterlidir.

Şekil 6: Sorun giderme dönüşümü. CT verileri 0.240 mm voksel boyutu ile altlık olarak ve MPI verileri 0.249 mm voksel boyutu ile kaplama olarak yüklenir. Fare yatağı, referans işaretleyiciler içerir. (A) Düzeltilmemiş kaplama görüntüsünün 3D görünümü. Bilgisayarlı tomografi altlığındaki referanslar oklarla belirtilmiştir. MPI kaplamasındaki referanslar, NIH renk tablosunda küreler olarak görünür. (B) Uygun düzeltmeler yapılmadan gerçekleştirilen bir dönüşümün eşleşmeyen sonucu. Füzyon kalıntısı = 6.94 mm. (C) CT'de referanslar arasındaki mesafelerin ölçümü. En kısa mesafeden en uzun mesafeye saat yönünde dönüş. (D) MPI'de referanslar arasındaki mesafelerin ölçümü. En kısa mesafeden en uzun mesafeye saat yönünün tersine dönüş. BT ölçümleri ile karşılaştırıldığında, 0.928774'lük bir ölçekleme faktörü ile sonuçlanır. (E) Çevirme ve ölçeklemeden sonra düzeltilmiş kaplama. (F) 3D görünümde eşleşen sonuçlarla dönüştürme. (G) Eksenel görünümde eşleşen sonuçlarla dönüştürme. Füzyon kalıntısı = 0.528 mm. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Yanlış voksel boyutlarına sahip veri kümeleri manuel olarak da düzeltilebilir. Fantomun boyutlarının bilinmesi gerektiğinden, bu görüntüde doğrulanabilir. En basit yöntem, bilinen uzunlukta bir kenar kullanmaktır. Kenarın bir ucundaki [Ctrl + sağ fare tuşu] tuşlarına basın ve düğmeyi basılı tutarken fare işaretçisini kenarın diğer ucuna getirin ve düğmeyi bırakın. Sonraki iletişim kutusunda, yazılım görüntüde ölçülen mesafenin uzunluğunu görüntüler. Şekil 6'da gösterilen örnekte, her iki modalitede de referanslar arasındaki mesafeler karşılaştırıldığında boyutların uyumlu olmadığı açıktır (Şekil 6C,D). Yine, CT verilerinin doğru olduğu varsayılır. Ölçeklendirmeyi değiştirmek için bir ölçeklendirme faktörü (SF) hesaplanır. Uzunlukların oranı (CT/MPI) üçgenin her iki kenarı için tam olarak aynı olmadığından, ortalama bölüm hesaplanır: SF = ((l1CT/l1MPI) + (l2CT/l2MPI) + (l2CT/l2MPI)) / 3.
Ardından, her bir boyutu SF ile çarparak kaplamanın voksel boyutunu ayarlayın. Bunu başarmak için, seçilen katmanı kaplamaya getirin ve Menü Düzenleme'yi açın > Voksel Boyutlarını Değiştirin. Her boyutu hesaplayın, değeri girin ve ardından Tamam'a tıklayın. Her iki düzeltmenin sonucu Şekil 6E'de gösterilmiştir. Bunu takiben, kaplama protokole göre altlığa kaydedilir. Ortaya çıkan hizalama Şekil 6F,G'de gösterilmektedir. Bu, mevcut bir taramayı düzeltmek için hızlı bir çözüm sağlasa da, görüntüleme cihazını üretim kullanımı için kalibre etmenizi öneririz.
Sınırlama
Bu yöntem, küp şeklindeki voksellerden oluşan mevcut hacimsel verilerin uzamsal olarak birlikte kaydedilmesi ile sınırlıdır. Görüntüleme cihazı tarafından üretilen ham verilerden (örneğin, BT'deki projeksiyonlar) hacmi hesaplayan bir yeniden yapılandırma sürecini içermez. Yinelemeli yöntemler20,21 ve yapay zekanın uygulanması21 gibi çeşitli görüntü geliştirme teknikleri bu adımla ilişkilendirilir. Açıklanan yöntem, prensip olarak, küp şeklindeki voksellerle 3D görüntüler üreten tüm modalitelere uygulanabilir olsa da, 2D kızılötesi termografi22 ile birleştirilmiş bir MRI hacmi veya görüntü kılavuzluğunda cerrahi uygulamalarla ilgili olabilecek floresan görüntüleme gibi 3D verileri 2D verilerle birleştirmek için kullanılamaz. 3D verilerin kaydedilmesi, bobin kenarındaki MRI görüntülerinde meydana gelenler gibi bozulmaları düzeltmez. Zorunlu olmamakla birlikte, rekonstrüksiyon işlemi sırasında bozulmalar düzeltildiğinde en iyi sonuçlar elde edilir. Otomatik dönüştürme, ters çevrilmiş görüntüleri veya yanlış ölçeklendirmeyi de ele almaz. Ancak, bu iki sorun sorun giderme bölümünde belirtildiği gibi manuel olarak çözülebilir.
Yöntemin önemi
Önerilen yöntem, üretim taramalarında referans belirteçlerine olan ihtiyacı ortadan kaldırarak çeşitli avantajlar sunar. Markör bakımının veya sık sık değiştirilmesinin gerekli olduğu modalitelere fayda sağlar. Örneğin, çoğu MRI belirteci neme dayanır ancak zamanla kuruma eğilimindedir ve radyoaktif PET belirteçleri bozulur. Üretim taramalarında referans maddelerine olan gereksinimi ortadan kaldırarak, görüş alanı azaltılabilir ve bu da daha kısa satın alma sürelerine yol açabilir. Bu, BT taramasında maliyetleri azaltmak ve x-ışını dozunu en aza indirmek için yüksek verimli ayarlarda yardımcı olur. Radyasyon, uzunlamasına görüntüleme çalışmalarında test hayvanlarının biyolojik yollarını etkileyebileceğinden, azaltılmış bir doz arzu edilir23.
Ayrıca, yöntem belirli modalitelerle sınırlı değildir. Bu çok yönlülüğün karşılığı, daha az adımın otomatikleştirilmesidir. μCT ve FMT verilerinin kaynaştırılması için daha önce yayınlanmış bir yöntem, her tarama için bir fare yatağında yerleşik işaretleyiciler kullanır ve rekonstrüksiyon sırasında otomatik işaretleyici algılama ve bozulma düzeltmesi gerçekleştirebilir24. Diğer yöntemler, görüntü benzerliğini kullanarak işaretleyici ihtiyacını ortadan kaldırır. Bu yaklaşım iyi sonuçlar verirken ve aynı zamanda bozulmalarıdüzeltebilir 25, ancak yalnızca iki modalite yeterince benzer görüntüler sağlıyorsa uygulanabilir. Anatomik olarak ayrıntılı bir modalite ile izleyici tabanlı bir modalitenin kombinasyonunda bu genellikle durum böyle değildir. Bununla birlikte, bu kombinasyonlar, antikanser nanoterapi 27,28 gibi alanlarda uygulamaları olan hedefe yönelik ajanların26 farmakokinetiğini değerlendirmek için gereklidir.
Preklinikte kalite kontrolün klinik uygulamalara kıyasla daha az titiz olması nedeniyle, kombine görüntüleme cihazlarının yanlış hizalanması bilinen bir sorundur29. Bu yanlış hizalamadan etkilenen veriler, bir hayaletin taranması ve diferansiyel dönüşümün belirlenmesi, potansiyel olarak maliyetlerin düşürülmesi ve hayvan zararının en aza indirilmesi yoluyla geriye dönük olarak iyileştirilebilir. Diferansiyel bir dönüşümü hesaplamak için referans belirteçleri kullanan ve daha sonra üretim taramalarına uygulanan gösterilen yönteme ek olarak, görüntü füzyonu için daha fazla olasılık açıklanır ve kullanılır. Mevcut çeşitli yazılımlara referanslar içeren bir genel bakış, Birkfellner ve ark.30'da bulunabilir.
Sonuç olarak, sunulan yöntem çok modlu görüntü ortak kaydı için etkili bir çözüm sunmaktadır. Protokol, çeşitli görüntüleme modaliteleri için kolayca uyarlanabilir ve sağlanan sorun giderme teknikleri, yöntemin tipik sorunlara karşı sağlamlığını artırır.
Açıklamalar
FG, biyomedikal görüntü analizi için yazılım ticarileştiren RWTH Aachen Üniversitesi'nin bir yan kuruluşu olan Gremse-IT GmbH'nin sahibidir. JJ, moleküler görüntüleme için fantomları ticarileştiren Phantech LLC'nin ortak sahibidir. Kalan yazarlar, araştırmanın potansiyel bir çıkar çatışması olarak yorumlanabilecek herhangi bir ticari veya finansal ilişkinin yokluğunda yürütüldüğünü beyan eder. M. T orijinal el yazmasını yazdı. J. J, makalede gösterildiği gibi örnek teşkil eden CT/SPECT taramalarını gerçekleştirdi. B. S ve Y. Z, makalede örnek gösterilen CT/MPI taramalarını gerçekleştirdiler. F. G çalışmayı denetledi ve makaleyi revize etti. Tüm yazarlar makaleye katkıda bulunmuş ve gönderilen versiyonu onaylamıştır.
Teşekkürler
Yazarlar, finansman için Kuzey Ren Vestfalya Federal Hükümeti'ne ve Avrupa Birliği'ne (EFRE), Alman Araştırma Vakfı'na (CRC1382 proje ID 403224013 - SFB 1382, proje Q1) teşekkür eder.
Malzemeler
| Name | Company | Catalog Number | Comments |
| 177Lu | radiotracer | ||
| Custom-build MPI mousebed | |||
| Hot Rod Derenzo | Phantech LLC. Madison, WI, USA | D271626 | linearly-filled channel derenzo phantom |
| Imalytics Preclinical 3.0 | Gremse-IT GmbH, Aachen, Germany | Analysis software | |
| Magnetic Insight | Magnetic Insight Inc., Alameda, CA, USA | MPI Imaging device | |
| Quantum GX microCT | PerkinElmer | µCT Imaging device | |
| U-SPECT/CT-UHR | MILabs B.V., CD Houten, The Netherlands | CT/SPECT Imaging device | |
| VivoTrax (5.5 Fe mg/mL) | Magnetic Insight Inc., Alameda, CA, USA | MIVT01-LOT00004 | MPI Markers |
Referanslar
- Hage, C., et al. Characterizing responsive and refractory orthotopic mouse models of hepatocellular carcinoma in cancer immunotherapy. PLOS ONE. 14 (7), (2019).
- Mannheim, J. G., et al. Comparison of small animal CT contrast agents. Contrast Media & Molecular Imaging. 11 (4), 272-284 (2016).
- Kampschulte, M., et al. Nano-computed tomography: technique and applications. RöFo - Fortschritte auf dem Gebiet der Röntgenstrahlen und der bildgebenden Verfahren. 188 (2), 146-154 (2016).
- Wang, X., Jacobs, M., Fayad, L. Therapeutic response in musculoskeletal soft tissue sarcomas: evaluation by magnetic resonance imaging. NMR in Biomedicine. 24 (6), 750-763 (2011).
- Hage, C., et al. Comparison of the accuracy of FMT/CT and PET/MRI for the assessment of Antibody biodistribution in squamous cell carcinoma xenografts. Journal of Nuclear Medicine: Official Publication, Society of Nuclear Medicine. 59 (1), 44-50 (2018).
- Borgert, J., et al. Fundamentals and applications of magnetic particle imaging. Journal of Cardiovascular Computed Tomography. 6 (3), 149-153 (2012).
- Vermeulen, I., Isin, E. M., Barton, P., Cillero-Pastor, B., Heeren, R. M. A. Multimodal molecular imaging in drug discovery and development. Drug Discovery Today. 27 (8), 2086-2099 (2022).
- Liu, Y. -. H., et al. Accuracy and reproducibility of absolute quantification of myocardial focal tracer uptake from molecularly targeted SPECT/CT: A canine validation. Journal of Nuclear Medicine Official Publication, Society of Nuclear Medicine. 52 (3), 453-460 (2011).
- Zhang, Y. -. D., et al. Advances in multimodal data fusion in neuroimaging: Overview, challenges, and novel orientation. An International Journal on Information Fusion. 64, 149-187 (2020).
- Nahrendorf, M., et al. Hybrid PET-optical imaging using targeted probes. Proceedings of the National Academy of Sciences. 107 (17), 7910-7915 (2010).
- Zhang, S., et al. In vivo co-registered hybrid-contrast imaging by successive photoacoustic tomography and magnetic resonance imaging. Photoacoustics. 31, 100506 (2023).
- Yamoah, G. G., et al. Data curation for preclinical and clinical multimodal imaging studies. Molecular Imaging and Biology. 21 (6), 1034-1043 (2019).
- Schönemann, P. H. A generalized solution of the orthogonal procrustes problem. Psychometrika. 31 (1), 1-10 (1966).
- Filippou, V., Tsoumpas, C. Recent advances on the development of phantoms using 3D printing for imaging with CT, MRI, PET, SPECT, and ultrasound. Medical Physics. 45 (9), e740-e760 (2018).
- Gear, J. I., et al. Radioactive 3D printing for the production of molecular imaging phantoms. Physics in Medicine and Biology. 65 (17), 175019 (2020).
- Sra, J. Cardiac image integration implications for atrial fibrillation ablation. Journal of Interventional Cardiac Electrophysiology: An International Journal of Arrhythmias and Pacing. 22 (2), 145-154 (2008).
- Zhao, H., et al. Reproducibility and radiation effect of high-resolution in vivo micro computed tomography imaging of the mouse lumbar vertebra and long bone. Annals of Biomedical Engineering. 48 (1), 157-168 (2020).
- Gremse, F., et al. Imalytics preclinical: interactive analysis of biomedical volume data. Theranostics. 6 (3), 328-341 (2016).
- Willmott, C. J., Matsuura, K. On the use of dimensioned measures of error to evaluate the performance of spatial interpolators. International Journal of Geographical Information Science. 20 (1), 89-102 (2006).
- Thamm, M., et al. Intrinsic respiratory gating for simultaneous multi-mouse µCT imaging to assess liver tumors. Frontiers in Medicine. 9, 878966 (2022).
- La Riviere, P. J., Crawford, C. R. From EMI to AI: a brief history of commercial CT reconstruction algorithms. Journal of Medical Imaging. 8 (5), 052111 (2021).
- Hoffmann, N., et al. Framework for 2D-3D image fusion of infrared thermography with preoperative MRI. Biomedical Engineering / Biomedizinische Technik. 62 (6), 599-607 (2017).
- Boone, J. M., Velazquez, O., Cherry, S. R. Small-animal X-ray dose from micro-CT. Molecular Imaging. 3 (3), 149-158 (2004).
- Gremse, F., et al. Hybrid µCt-Fmt imaging and image analysis. Journal of Visualized Experiments. 100, e52770 (2015).
- Bhushan, C., et al. Co-registration and distortion correction of diffusion and anatomical images based on inverse contrast normalization. NeuroImage. 115, 269-280 (2015).
- Lee, S. Y., Jeon, S. I., Jung, S., Chung, I. J., Ahn, C. -. H. Targeted multimodal imaging modalities. Advanced Drug Delivery Reviews. 76, 60-78 (2014).
- Dasgupta, A., Biancacci, I., Kiessling, F., Lammers, T. Imaging-assisted anticancer nanotherapy. Theranostics. 10 (3), 956-967 (2020).
- Zhu, X., Li, J., Peng, P., Hosseini Nassab, N., Smith, B. R. Quantitative drug release monitoring in tumors of living subjects by magnetic particle imaging nanocomposite. Nano Letters. 19 (10), 6725-6733 (2019).
- McDougald, W. A., Mannheim, J. G. Understanding the importance of quality control and quality assurance in preclinical PET/CT imaging. EJNMMI Physics. 9 (1), 77 (2022).
- Birkfellner, W., et al. Multi-modality imaging: a software fusion and image-guided therapy perspective. Frontiers in Physics. 6, 00066 (2018).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır