
Method Article
改进的精益和释放技术,强调反应抑制和反应平衡中的动作选择
摘要
在这里,我们提供一个协议,允许用户有选择地改变负担和/或限制运动,与恢复平衡后姿势扰动。
摘要
对反应平衡的评估传统上对直立姿势或步态施加某种扰动,然后测量由此产生的矫正行为。这些措施包括肌肉反应、肢体运动、地面反应力,甚至直接的神经生理测量,如脑电图。使用这种方法,研究人员和临床医生可以推断出一些关于神经系统如何控制平衡以避免跌倒的基本原则。目前使用这些评估方式的一个限制是,它们严重强调反身行为,无需修改自动姿势反应。这种对这些高度陈规定型反应的独到注意力,将不能充分解决在出现需要时我们如何改变这些反应的问题(例如,通过恢复步骤避免障碍)。当人们考虑到我们每天面临的环境的巨大复杂性时,这似乎是一个明显的疏忽。总体而言,评估平衡的神经控制时的现状无法真正揭示大脑资源越高对防止复杂环境中跌倒的贡献。本议定书提供了一种方法,要求抑制自动但不适当的矫正平衡反应,并强制在替代行动选择中做出选择,以在姿势扰动后成功恢复平衡。
引言
尽管公认的跌倒和认知衰退之间的相关性11,2,3,2,3一个主要的差距仍然存在于理解大脑实际上做什么,以帮助我们避免跌倒。从理论上讲,随着环境复杂性的增加,以及我们需要修正本能行为的情况,认知需求会更加突出。然而,大多数平衡测试未能有效地对更高的大脑功能征税,而是强调反射右反应。虽然反应速度等因素对于防止跌倒至关重要,但在某些情况下,其他认知因素(如抑制控制和/或根据给定上下文选择适当操作的能力)可能也很重要。因此,我们可能不了解大脑在反应平衡中的作用的一个原因是目前使用的研究协议。罗杰斯等人最近总结了使用外部扰动4评估平衡控制的不同方式。这些方法包括平台转换、倾斜和/或跌落,以及使用自动系统推动、拉动或删除姿势支持。尽管使用各种技术来破坏直立平衡,但随后的矫正反应几乎总是在一个畅通无阻的环境中进行的,从而最大限度地减少了对运动的限制。在这里,我们提出了一种方法,其中需要认知过程来覆盖特权行动,并在反应平衡任务中的备选方案中选择适当的响应。
测试反应平衡的一种常见方法是施加相对较小的姿势扰动,可以使用固定支撑(通常就地英尺)反应55、6、7、86,7,8、99进行反击。相对较少的研究侧重于通过腰部拉扯、平台翻译和从支撑电缆释放的扰动来响应支持平衡反应。10后一组的重要性可以认识到,当扰动很大时,改变支持反应是恢复稳定性的唯一选择11。事实上,即使对于可以使用就地脚(即臀部和/或脚踝)策略进行管理的较小扰动,人们也常常喜欢在选择11时步步。研究这种支助反应变化的价值不仅在于必须应对更大的扰动,而且还要考虑到在重新定位四肢以建立新的支助基础时出现的挑战。对行动的承受和/或限制是许多实际环境中的常规部分。这强制选择过程在出现余额损失时建立新的支持基础。为了适应复杂的环境,对更高大脑资源的需求更高。当四肢必须建立新的支持基础时,情况尤其如此。强调和暴露被动平衡中的认知角色,需要重新引入杂乱,用四肢迫使改变支持策略,这似乎是合乎逻辑的。
提供外部诱导姿势扰动的一种简单方法是精益和释放技术,即个人突然从支持的正向精益中释放出来。这种方法允许评估补偿反应,以避免向前下降,并已成功地用于健康和临床人群12,13,14。12,13,14尽管精益和释放技术有些基本,但它为被动平衡能力提供了有价值的见解(例如,某人启动恢复步骤的速度,或确定恢复稳定性所需的步骤数)。就目前而言,精益和释放技术提供了一种探索反应平衡中的认知角色的简单方法,因为许多扰动特征保持不变。这为与动作选择和响应抑制特别相关的变量提供了更大的实验控制。虽然其他姿势扰动模式通常依赖于扰动方向、振幅和时序方面的不可预测性,但周围的环境始终保持不变。即使在研究中,腿块已经被用来强调接触到抓握的反应15块固定到位,无需根据腿块的存在或不存在快速调整步进行为。通过目前提出的方法,我们可以以一种要求行为适应的方式改变环境,以避免跌倒。
除了实验室设置没有充分暴露反应平衡中的认知作用之外,另一个主要问题是严重依赖外部措施,如肌肉启动、地面反应力和视频运动捕捉来推断神经过程。虽然这些措施是有价值的,但仅仅依赖这些措施不能直接洞察有助于平衡的基本神经机制。当考虑到大脑在复杂环境中可能采取的大部分措施可能在坠落之前发生,这个问题就更加复杂了。秋季预防中的预测作用最近得到了更广泛的讨论。研究方向包括预测未来不稳定17,在我们通过环境18时建造视觉空间地图,以及可能根据环境形成应急,即使事先不知道秋天19。如果不使用直接的神经生理探针,揭示这种制剂将是完全无法访问的。
目前提议的改进的精益和释放方法提供了克服上述一些现有限制的方法。这是通过使用测试场景来实现的,在这种情况下需要四肢在要求选择的环境中建立新的支持基础。在姿势扰动前后,通过直接测量大脑活动(例如颅内磁刺激、TMS)来增强这种方法,这可以补充力生成和运动捕捉的外部措施。这种实验功能的组合代表了该领域的一项重要创新,旨在揭示大脑如何有助于在复杂环境中平衡,在这种环境中,需要响应抑制和选择选项之间的操作来防止跌倒。在这里,我们演示了一种在强调认知过程需要调整行为以避免跌倒的环境中测试反应平衡的新方法。障碍和行动能力的结合迫使各种选择之间需要反应抑制、有针对性的行动和反应选择。此外,我们演示了对视觉访问、神经探测器计时、改变响应环境以及姿势扰动的开始的精确时间控制。
研究方案
所有程序都得到犹他州立大学机构审查委员会的批准,并且是按照《赫尔辛基宣言》进行的。
1. 参与者筛查
- 在测试前,让参与者对程序提供书面知情同意。
- 对于TMS测试,在测试前筛选参与者,以便使用由专家组20制定的指南来评估他们对TMS的适用性。
2. 数据采集:电成像(EMG)
- 使用表面电极和放大信号记录EMG(增益= 1,000;参见材料表)。
- 使用数据采集接口和适当的软件获取数据和带通滤波器(10~1,000 Hz)(参见材料表)。使用此设备和软件可以控制各种电机、电缆释放和遮挡护目镜,如这些方法后面所述。
- 轻轻磨损皮肤表面,并用酒精擦拭目标肌肉部位。使用双面胶带将表面 EMG 电极固定到目标肌肉上,并使用预包装进一步固定,以确保电极保持固定,尤其是在与手臂和腿部快速响应时。
- 从右手的两个内在手部肌肉(第一性间体、FDI 和蛋白酶波雷、OP)和双腿的脚踝多索多器(前背骨,TA)收集 EMG 数据。
注:这些特定的肌肉的选择是基于它们与抓握动作或前进步骤的相关性,但可以根据需要选择其他肌肉。
3. 平衡测试设备

图 1.使用腿块的精益和释放设置。在此示例中,一个支腿块设置在打开位置,而另一个腿块设置为阻止步骤。这些模块通过计算机控制的电机(连接到支撑柱的灰色盒子)移动。手柄盖也会移动到块或允许触手可及的响应。在这里,盖子被分离,以允许手柄的完整视图。释放磁铁在后墙上可见。所有线路都通过木平台本身馈入后角的灰色电路箱。请点击此处查看此图形的较大版本。
{kind=link}

图 2.使用力板的精益和释放设置。下图描绘了如何选择将三个力板嵌入到木平台上。如果不需要强制板,可设置木塞。这些插头是可见的,靠在侧壁上。此图像还显示学员佩戴的安全带。如果学员无法自行恢复平衡,则此线束固定在天花板上,作为安全机制。请点击此处查看此图形的较大版本。
{kind=link}
- 改进的精益和释放系统
- 使用定制的精益和释放电缆系统施加正向扰动(参见图 1和图 2)。
- 让参与者站在一个向前倾斜的位置,他们的脚大约臀部宽度分开(参见图3)。使用连接到电缆的车身线束保持向前倾斜,然后固定在电缆后面的墙壁上。将电缆固定在线束的背面(大约中胸水平)。用磁铁将支撑电缆固定在墙上。磁体将被短暂停用以释放电缆。
- 使特定的试验过程(即电缆释放和电缆释放时)对参与者不可预测。通过预设到软件配置的计算机命令控制电缆释放的精确时间。此配置将允许控制电缆释放的时间,以便它可以在试验中随机进行。
注: 控制所有实验设备的软件配置(例如,触发电机定位支腿块)设置特定的试验条件(例如,如果存在支腿块)。这可以编程为随机化条件或以块形式提供条件,以控制可预见性级别。 - 除了连接到线束背面的释放电缆外,还将学员固定在悬挂在天花板上的支撑电缆上。除非绝对必要,否则此防故障电缆不提供重量支撑。如果参与者无法自行恢复平衡,电缆在坠落地面之前会捕获它们。
- 由于可靠的视觉信息的重要性,请验证参与者在佩戴护目镜时是否能够实际看到手柄和腿块。开始每次试验,指示参与者直接查看地板上的固定点,即前方约 3 米处的固定点,同时将头部放在舒适的位置。放置参与者,以便其凝视设置为查看外围视觉场中的手柄和障碍物的顶部。
- 放置身体,确保手柄在可把握范围内。让学员向前倾斜,同时保持双脚与地板接触。这将需要旋转脚踝,而身体的其余部分保持直线。
- 确定特定的倾斜位置作为最小倾斜角度,在电缆松开时需要向前一步来恢复平衡。这是一个迭代过程,用于在踝关节上找到阈值倾斜角,这是参与者不再能够使用就地反应防止向前坠落的角度。建立后,使用测角仪验证整个测试的精益角度。
- 补偿性平衡反应的支付和限制
- 将安全手柄固定在右侧参与者旁边的墙上。使用电动盖来控制对此手柄的访问。如果发现手柄,当参与者从其支持的向前倾斜中释放时,它可以用来恢复平衡。
- 在发现手柄的试验中,在参与者的腿部前面放置一个腿块。腿块阻碍一步,但不是硬设置到位,这意味着它可以被踢移。对腿块进行编程,允许自由移动,并构造其符合材料以避免受伤。
注:腿块被构造,以迫使一个'全或无'步骤的决定,因为他们上升近30英寸离地面(在大多数个人的中高水平)。对于对恢复步骤进行更细微封锁的研究人员来说,这些设备可以修改为使用更小/更短的障碍,然后允许调整步骤来清除它们。 - 使用黑色篷布盖住手柄,并阻止它在某些试验中查看。手柄将保持在同一位置,但将实际覆盖,以防止直接的视觉访问,并防止任何支持性抓地力。覆盖此支撑手柄时,拆下支腿块,以便在必要时进行步进反应。
- 视觉控制
- 通过液晶护目镜将视力限制在姿势扰动和控制之前的时间范围(参见材料表)。关闭后,护目镜会阻止进入视觉场景,因此参与者不知道即将出现的反应情况。
- 在护目镜关闭时,更改腿块的特定配置并处理每次试验的可用性,以便学员在护目镜打开后需要快速感知环境。在每个试验开始时,通过计算机触发的伺服电机将手柄盖和支腿块移到位置。让参与者佩戴耳塞,使电机在视觉遮挡期间持续移动,以避免对即将出现的情况进行任何高级提示。
4. 实验设计
- 在测试之前,简要地熟悉参与者如何到达手柄并从倾斜位置向前走。
- 向学员提供即将进行的练习条件的全面了解,并确保没有不确定性。指示学员,一旦护目镜打开,他们将看到覆盖的手柄,步进路径将清晰。不久之后,支撑电缆将松开,他们必须快速踩下,以避免向前掉下来。
- 使用类似的说明,说明手柄是否可用于抓握以避免步进。
- 在整个测试和实践过程中,指示学员保持放松,除非突然发出电缆释放。
注:在正式测试开始之前,参与者平均需要大约 10 次练习尝试。
- 随机更改试验之间的响应设置。如果从支撑电缆中松开,参与者必须通过伸手去拿壁挂式安全手柄或踩进步骤(如果步进路径清晰)来恢复稳定性。
- 每次试验开始时,始终关闭遮挡护目镜,此时响应设置将更改。关闭护目镜的随机周期(通常约为 3⁄4 s),以便更改设置。
- 当护目镜打开时,提供两种可能的响应设置之一:(1) 存在支腿块且支撑手柄存在,或 (2) 不存在支腿块,并且不存在支撑手柄。
注:在第一个条件下,支撑手柄在舒适的距离内可用,并且腿块可防止步进。此设置强制设置一个上下文,其中唯一可用的选项是快速掌握可用支持手柄,其右臂。第二个条件允许恢复步骤,同时防止使用支持句柄。 - 在确实发生扰动的试验中,在护目镜打开后不久松开电缆。此延迟期随学习要求而异,但范围为 200-1,000 毫秒。
- 对于某些审判,不要释放作为抓捕审判。这有助于避免仅基于视力的预见性反应。
- 每个试验都持续10次,在试验之间稍作停顿,让参与者有机会根据需要重置。在每个测试块之间给参与者一个短暂的休息时间,并允许他们坐下来。基本实验设计如图3(下图)所示。
注:总试验数各不相同,以适应每个研究的需要,但往往包括大约100个试验,分为三到四个测试块。

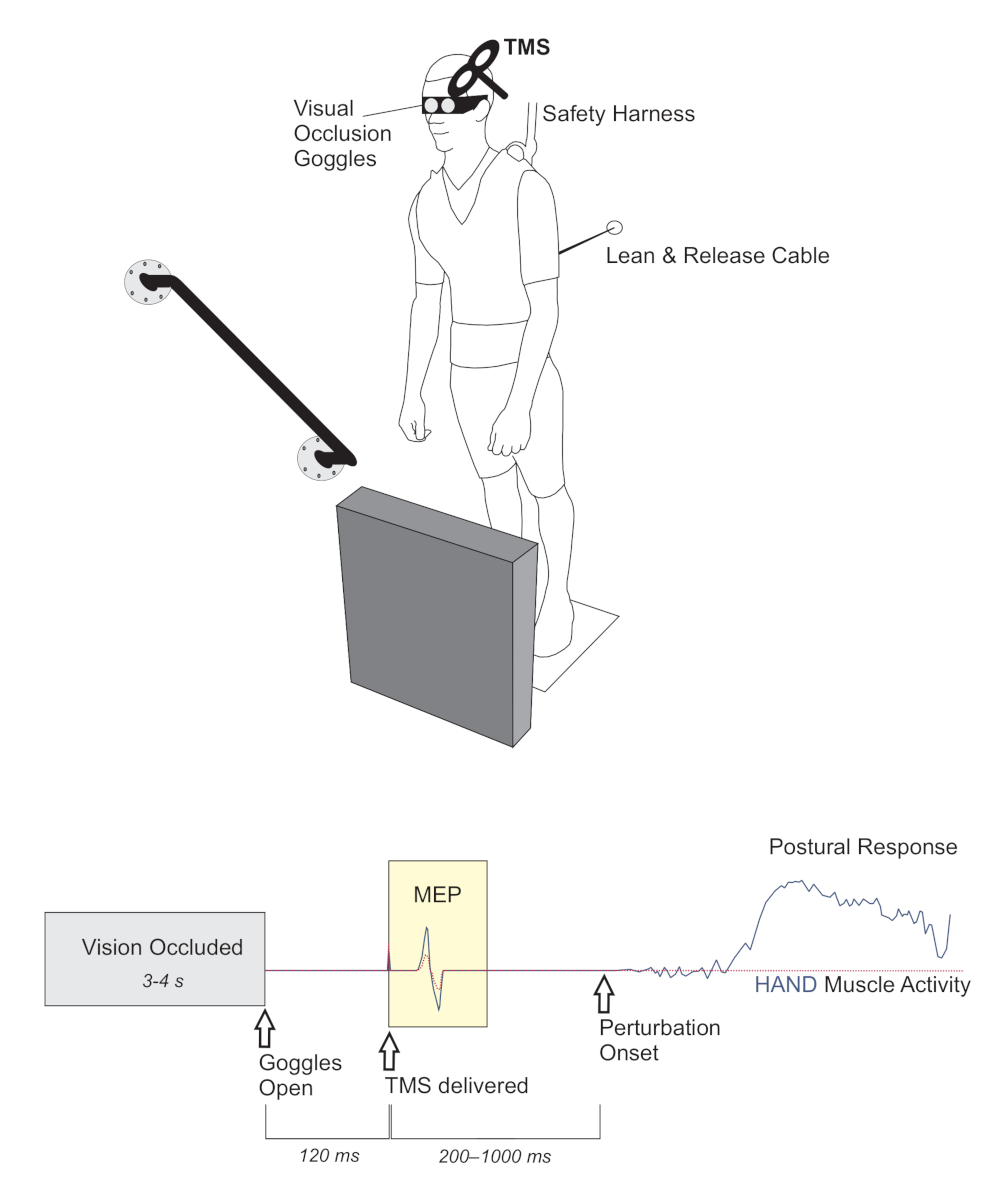
图 3.基于 TMS 的方法,用于调查感知环境负担和/或限制电机制备的影响。顶部。精益和释放装置以不可预知的方式释放参与者(仅限扰动测试块)。扰动的程度需要快速改变支持反应,使用手臂或腿通过到达安全手握或向前迈出一步来重建稳定的支撑基础。在试验之间,使用液晶遮挡眼镜遮挡了视觉,前景中的物体被随机重新排列。底部。时间线描述了何时可以使用可视环境访问,以及 TMS 探测器相对于视觉访问和扰动的时间。肌肉对TMS的反应的峰值到峰值振幅(即运动调用电位,MEP)提供了在扰动前的期间皮质脊柱可兴奋性指数。此图提供理论响应数据,以演示手操作(实线、蓝线)与覆盖手柄(虚线、红线)的试验的假设影响。在这一图中,两种试验/条件都叠加在一起,以说明准备电机输出以促进或抑制基于特定环境环境的潜在作用的假设效应。改编自博尔顿等人21中的图1。请注意,在此示例中,TMS 用于探测皮质脊柱的兴奋性。但是,这仅用于使用此修改的精益和发布提供事件序列的基本表示形式。请点击此处查看此图形的较大版本。
{kind=link}
5. TMS 协议(可选)
- 在手电机皮质表示上提供单脉冲 TMS,同时支持参与者向前倾斜。在打开护目镜后不久,但在任何运动之前提供 TMS 脉冲,以调查查看环境如何影响电机组。参见图 3以可视化试用期间的事件序列,包括 TMS 交付时间。
- 根据研究问题设置 TMS 交付的时间。在具有代表性的结果中,刺激在100毫秒和200毫秒后视觉之间变化。除了上面列出的响应设置外,在整个测试过程中随机穿插"无视觉"参考试验,以便在不打开护目镜的情况下提供 TMS。此条件的目的是为电机活动中与任务相关的任何更改(例如,增加唤醒)提供基准。
注:有关具体TMS程序的进一步详情见博尔顿等人21和古德等人22。 - 将磁性刺激输送到初级运动皮层(M1),刺激线圈方向约为45°至下垂平面(参见材料表)。在最佳位置应用刺激,以获得右侧 FDI 肌肉(即电机"热点")中的电机调用电位 (MEP)。
- 找到"热点"后,确定测试刺激强度。就当前研究目的而言,这是平均 MEP 约为 1-1.5 mV 峰值峰值的刺激强度。将 TMS 线圈固定在此位置,并在发生头运动时(例如,在电缆释放后)重置线圈位置。确定测试刺激强度,而受试者站在向前精益,以考虑任何姿势状态对皮质脊柱兴奋性的影响。
结果
所有提出的范例研究都是对18-30岁的年轻男女进行的。每项研究的总样本大小如下:例1(Rydalch等人23)包括12名参与者,示例2(博尔顿等人21)包括63名参与者,示例3(Goode等人22)包括19名参与者。读者应参考完整的研究,了解方法和分析的详细信息。
示例 1
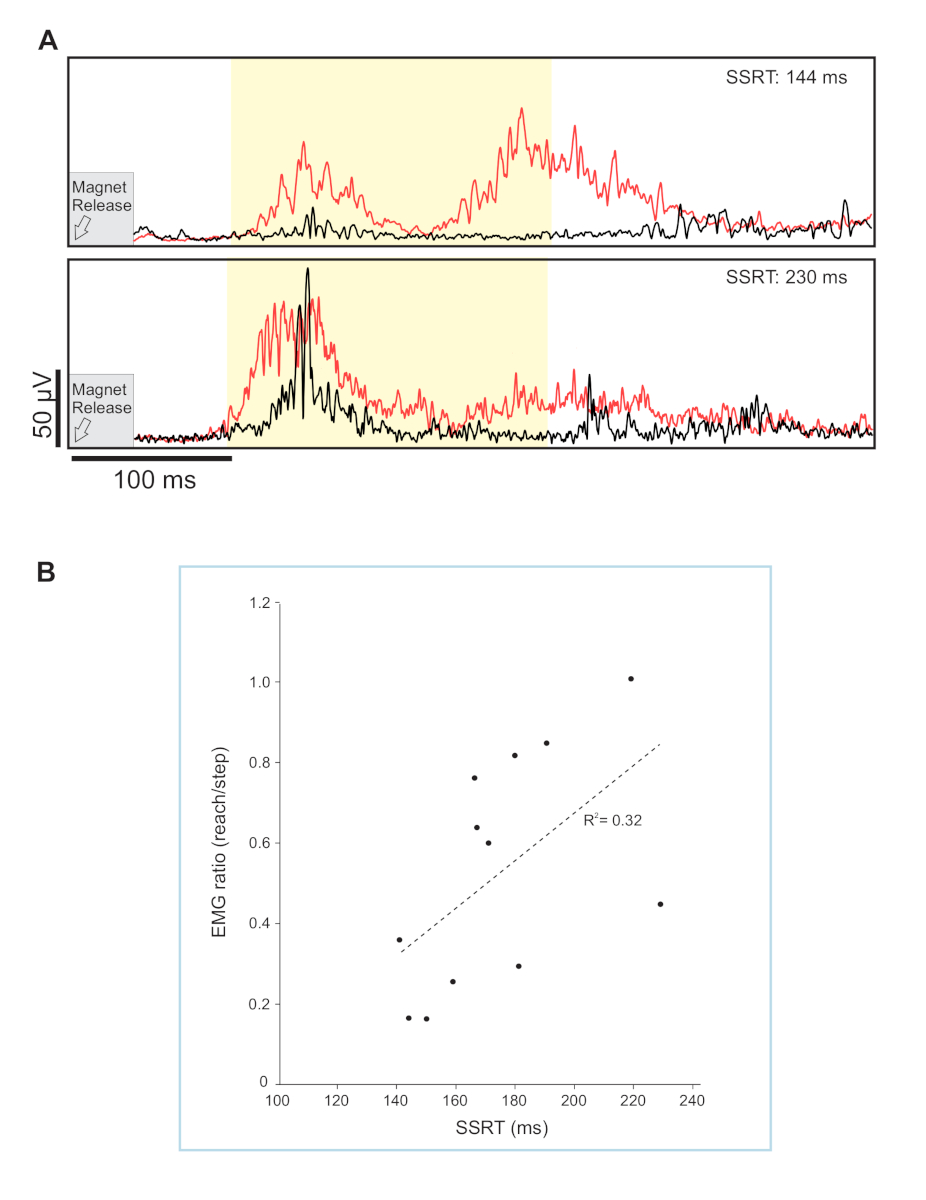
阻止快速恢复步骤,特别是当步进通过频繁重复自动进行时,允许在姿势语境中评估反应抑制。在这里,我们比较了腿部肌肉的反应,当向前一步是允许或阻碍23。步进腿的肌肉反应在试验之间比较,参与者应该达到与试验,他们应该步。这是通过比较在接触手柄和步进试验期间脚踝多西多弗斯(前双体)的反应幅度来实现的。具体来说,在200 ms窗口(即100 ms至300 ms的扰动后)上的集成EMG用于计算肌肉反应比。较小的值表明,在Rydalch等人23中详细描述的那样,有更大的能力避免踩踏。通过使用肌肉反应的大小,我们的目的是提供一个敏感的量表,对腿部的反应倾向。在此示例中,我们研究的目标是确定响应抑制是否通过坐式认知测试(即停止信号任务,SST)测量,与需要抑制平衡恢复步骤的被动平衡任务的性能相关。在平衡任务中,共收集了256个试验,其中30%使用腿块。在图4A中,我们突出显示了连续体两端用于抑制步进相关腿部活动的个人的平均波形。图 4B中的散点图描述了抑制阻塞步进的能力与停止信号反应时间测量的响应抑制之间的小相关性。
在解释这些结果时,重要的是要认识到SST(在附录中描述),实际上大多数认知测试,依赖于坐姿的参与者对计算机屏幕上显示的强制性提示做出的简单化反应(通常是手指动作)。Rydalch等人的这项研究讨论了在反应抑制的标准坐位测试中,停止特能反应的能力是否与反应平衡测试相比,补偿步骤必须偶尔被抑制。结果表明,认知测试结果(停止信号反应时间)与补偿性步进之间存在相关性,这表明个体的停止能力在不同任务中普遍化。

图 4.平均步腿响应。 (A) 平均波形显示在步进腿的前壁座前。步进试验以红色显示,并到达黑色试验。为两个参与者显示的肌肉反应数据,具有快速(顶部)或慢停止(底部)信号反应时间。此停止信号反应时间提供一毫秒的停止能力测量。早期肌肉反应(集成EMG)从100~300毫秒(浅黄色浅区域)测量。(B) 显示肌肉响应比与停止信号反应时间 (SSRT) 在 400 ms 视觉延迟时的相关性的散点图, r = 0.561;p = 0.029。改编自图3和图5,Rydalch等人23。请点击此处查看此图形的较大版本。
{kind=link}
示例 2
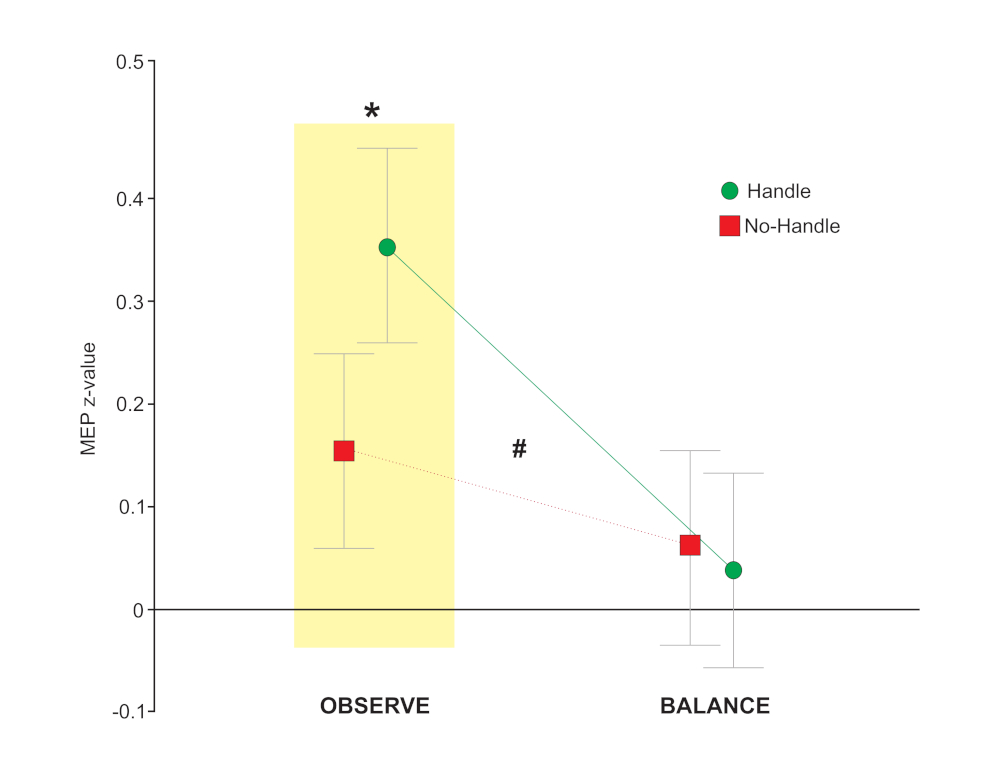
本研究举例说明了,当与TMS结合使用改进的精益和释放设置时,如何用于研究基于视觉的运动准备。负担的概念(最初由吉布森24提出)是在站立的姿势语境中测试的,以确定在查看支撑手柄时,手肌的皮质脊柱兴奋性(用于抓握)是否得到促进。这种方法的关键是评估电机系统的兴奋状态如何仅受视觉的影响。具体来说,TMS 脉冲是在护目镜打开后不久交付的,但在任何移动提示(即电缆释放)之前交付。以这种方式,仅分析与视觉场景相关的运动活动,而对扰动的行为反应是次要的。与上述研究不同,该研究强调需要更频繁地呈现步进响应,该研究使用同等概率的手柄(到达)与无手柄(步长)来关注手部动作的视觉刺激。结果表明,观察手柄可以促进内在手(即抓握)肌肉,但只能在纯观察条件下(图5)21。21注:有关示例数据、采集和分析软件代码,以及指导说明,请参阅开放式科学框架 (https://osf.io/9z3nw/)。示例 1 和 3 使用了类似的代码和过程,并修改了特定状态。

图 5.数据显示,在参与者站在支持的瘦中时,REACH(即手柄)与 STEP(即无手柄)试验的皮质脊柱兴奋性存在差异。这表明当手柄存在时,手部的活动更大,参与者只是查看手柄 (OBS),但在电缆定期释放的单独平衡 (BAL) 试验块中不存在此效果。误差条显示均值的标准误差。双向重复测量 ANOVA 揭示了条件与负担之间的相互作用,F1、62 = 5.69、= #p = 0.020。为了解决我们的具体假设,我们使用事先计划的比较来确定当处理单独存在于每个条件中时,FDI 中的 MEP 振幅是否更大。对于假设 1,计划比较用于比较 OBS 条件内的承受率(STEP、REACH),并在手柄可见时显示振幅显著增加,t121 = 2.62, =p = 0.010。对于假设2,我们最初预测了相互作用,但与所发现的方向相反。在 BAL 条件内对 afford 的有计划比较显示,与句柄的存在(t121 = -0.46、p = 0.644)没有显著差异。改编自图5,博尔顿等人21。请点击此处查看此图形的较大版本。
{kind=link}
示例 3
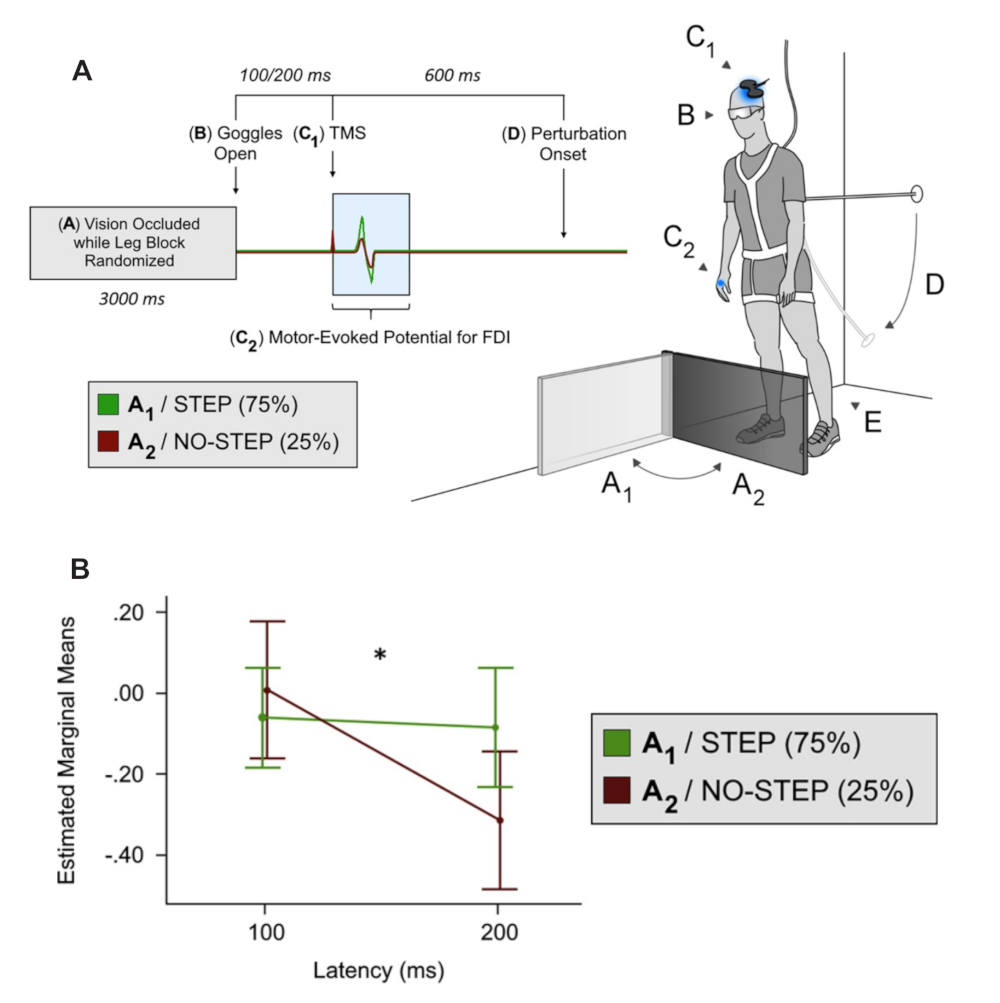
最后一个例子强调我们如何调整这个设备,以再次研究基于视力的手肌肉的运动准备,但侧重于快速抑制腿部动作的需要。在此版本中,手柄盖被永久覆盖,而只有腿块移动。与示例 1 一样,通过操纵停止与步骤条件的概率来鼓励自动步骤。鉴于手柄在本研究中不再是一种选择,在脚踝处测量的向前倾斜程度略有下降(*6° vs. ±10°,如上述两项研究所示),以允许固定的支持反应。这个版本的任务的具体用途是研究全球抑制的概念,以前曾在坐姿任务中探讨过这种概念,其中使用焦点按钮按下来响应25日电脑显示屏上呈现的视觉刺激。与示例 2 一样,TMS 被交付用于评估内在手肌在进入响应环境(即块或无块)后立即在内陆手肌肉中皮质脊柱的兴奋性,但在任何移动提示(即电缆释放)之前。在只使用腿部反应的任务中测试内在手肌的理由是,看看一个不相关的肌肉是否能够显示整个运动系统普遍抑制的证据。下图6所示的结果显示了当自动步进突然停止22时,整个电机系统普遍停机的证据。

图 6.仅使用腿块修改的精益和释放任务(即,没有用于抓住支撑手柄的选项)。(A) 此图描绘了出现腿部阻塞时内在手肌肉中的 MEP 振幅抑制(即 NO-STEP 条件)。(B) 从重复测量 ANOVA 中,步进条件 x 延迟交互,F1,18 = 4.47,p = 0.049,是显著的。 p对线图 2 的目视检查显示,仅通过后续比较,NO-STEP 条件会随时间而减小 MEP 振幅,并证实了这一点。具体来说,这些比较显示,与 100 ms t18 = 2.595 相比,在 200 毫秒时显著降低 , *p = 0.009 为 NO-STEP 条件。相比之下,STEP 条件在 200 毫秒和 100 毫秒之间进行的类似比较显示没有区别 t18 = 0.346,p = 0.367。 p改编自图1和图2,古德等人22。请点击此处查看此图形的较大版本。
{kind=link}
讨论
这种经过修改的精益和释放系统为评估反应平衡中的认知角色提供了一种新方法。与标准精益和释放程序一样,姿势扰动的方向和振幅是可预测的,而电缆释放的时间是不可预测的。当前方法的独特之处是,在主题保持固定且响应环境改变时,对视觉的访问将受到精确控制,从而产生不同的行动机会和/或约束。通过操纵存在障碍和负担,这种方法强调认知过程,如决策(即行动选择)和响应抑制与平衡恢复有关。
该方法有可能对平衡的神经控制提供独特的一瞥,但存在某些局限性。例如,当使用精益和释放方法时,电缆释放是从正向精益启动的,这与其他外部姿势扰动方法相比,需要明显的平衡恢复步骤。此外,扰动的方向和幅度是可预测的,这可能导致肌肉的预计激活,通常不会参与更现实的秋季场景。最后,在电缆释放之前,视力被暂时遮挡,这也偏离了个人的日常体验。这些功能使我们对平衡的评估有些人为,并可能排除不同扰动模式的概括。重要的是要认识到,当从任何特定评估方法推断平衡如何控制时,对现实世界的可概括性总是一个令人关切的问题。事实上,目前不存在一个公认的平衡能力综合测试。目前,一组向前坠落允许保持扰动特性和响应设置不变,同时操纵在传统平衡评估中经常被忽视或无法访问的特定认知需求。这种实验性控制是有益的,但在解释结果时应考虑。
作为第二个限制,测试设备的建造和必要的工程技能可能是实施此方法的挑战。来自犹他州立大学的三名电气工程专业学生搭建了这个平台,设置了电子装置,并编程了微控制器,以驱动伺服电机的手柄盖和腿块。建筑费用微薄(即,15,000美元不包括安装在平台上的力板)。然而,这可能构成挑战,这取决于现有资源。
使用这种方法获得了对平衡神经控制的具体见解。这些例子表明,非侵入性的大脑刺激可用于捕捉基于在姿势上下文中观察物体的运动集,并提供一种技术,使用肌肉反应评估反应抑制。值得注意的是,改进后的精益和释放技术可以很容易地适应,以纳入其他神经生理学探测器,如脑电图和功能近红外光谱。即使没有包含直接的神经测量,完全专注于外力、肌肉激活和运动学的研究设计也能为认知缺陷的行为标记提供重要的见解。例如,Cohen等人26日演示了一个有趣的应用,即使用力板捕捉反应步进任务期间的预计姿势移位。在他们的研究中,老年人反应抑制的不足被不当的体重转移所揭示,这反过来又导致选择反应步骤时间的延迟。这种办法可应用于目前的范式,以获得重量转移和步进误差的敏感衡量标准。
此新方法基于已建立的被动平衡测试构建,参与者从支持的精益中释放,现在包括需要行为灵活性的方案。适合暴露响应抑制和动作选择的测试设计允许我们一种将认知心理学的概念应用于平衡控制领域的方法。这种方法是必要的,以建立认知衰退和下降流行是相关的认识,并获得认知资源如何防止跌倒的机械理解。大概这个设置不仅可以用作研究工具,还可以作为一种平衡训练认知角色的手段。我们的实验室正在进行的工作的一个重要目的是了解大脑如何利用上下文信息来更新哪种运动最适合防止环境下降。线索,如一个稳定的手握或潜在的步障可以指导哪些反应,当需要出现,并可能秘密塑造预测性的大脑过程16。值得注意的是,如果需要抑制干扰控制或视觉空间记忆等心理能力,适当使用这些信息的能力可能会随着年龄的增长而恶化。鉴于认知衰退与下降1-3之间的关系,实施强调需要整合上下文相关性的研究设计,可以为许多弱势群体的平衡缺陷提供有价值的见解。
披露声明
作者没有什么可透露的。
致谢
本出版物中报告的研究得到了国家卫生研究院国家老龄研究所R21AG061688号奖励的支持。内容完全由作者负责,不一定代表国家卫生研究院的官方观点。
材料
| Name | Company | Catalog Number | Comments |
| CED Power1401 | Cambridge Electronic Design | Data acquisition interface | |
| Delsys Bagnoli-4 amplifier | Delsys | EMG equipment | |
| Figure-eight D702 Coil | Magstim Company Ltd | TMS coil | |
| Kistler Force Plates | Kistler Instrument Corp. | Multicomponent Force Plate Type 9260AA | Force plates |
| Magstim 200 stimulator | Magstim Company Ltd | TMS stimulation units | |
| PLATO occlusion spectacles | Translucent Technologies Inc | visual occlusion | |
| Signal software | Cambridge Electronic Design | Version 7 |
参考文献
- Mirelman, A., et al. Executive function and falls in older adults: new findings from a five-year prospective study link fall risk to cognition. PloS one. 7 (6), 40297 (2012).
- Herman, T., Mirelman, A., Giladi, N., Schweiger, A., Hausdorff, J. M. Executive control deficits as a prodrome to falls in healthy older adults: a prospective study linking thinking, walking, and falling. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 65 (10), 1086-1092 (2010).
- Saverino, A., Waller, D., Rantell, K., Parry, R., Moriarty, A., Playford, E. D. The Role of Cognitive Factors in Predicting Balance and Fall Risk in a Neuro-Rehabilitation Setting. PLOS ONE. 11 (4), 0153469 (2016).
- Rogers, M. W., Mille, M. -. L. Chapter 5 - Balance perturbations. Handbook of Clinical Neurology. 159, 85-105 (2018).
- Adkin, A. L., Campbell, A. D., Chua, R., Carpenter, M. G. The influence of postural threat on the cortical response to unpredictable and predictable postural perturbations. Neuroscience Letters. 435 (2), 120-125 (2008).
- Marlin, A., Mochizuki, G., Staines, W. R., McIlroy, W. E. Localizing evoked cortical activity associated with balance reactions: does the anterior cingulate play a role. Journal of Neurophysiology. 111 (12), 2634-2643 (2014).
- Horak, F. B., Nashner, L. M. Central programming of postural movements: adaptation to altered support-surface configurations. Journal of Neurophysiology. 55 (6), 1369-1381 (1986).
- Nashner, L. M. Fixed patterns of rapid postural responses among leg muscles during stance. Experimental Brain Research. 30 (1), 13-24 (1977).
- Varghese, J. P., Marlin, A., Beyer, K. B., Staines, W. R., Mochizuki, G., McIlroy, W. E. Frequency characteristics of cortical activity associated with perturbations to upright stability. Neuroscience Letters. 578, 33-38 (2014).
- Mansfield, A., Maki, B. E. Are age-related impairments in change-in-support balance reactions dependent on the method of balance perturbation. Journal of Biomechanics. 42 (8), 1023-1031 (2009).
- Maki, B. E., McIlroy, W. E. The role of limb movements in maintaining upright stance: the "change-in-support" strategy. Physical Therapy. 77 (5), 488-507 (1997).
- Lakhani, B., Mansfield, A., Inness, E. L., McIlroy, W. E. Characterizing the determinants of limb preference for compensatory stepping in healthy young adults. Gait & Posture. 33 (2), 200-204 (2011).
- Mansfield, A., et al. Training rapid stepping responses in an individual with stroke. Physical Therapy. 91 (6), 958-969 (2011).
- Mansfield, A., Inness, E. L., Lakhani, B., McIlroy, W. E. Determinants of limb preference for initiating compensatory stepping poststroke. Archives of Physical Medicine and Rehabilitation. 93 (7), 1179-1184 (2012).
- Cheng, K. C., Pratt, J., Maki, B. E. Effects of spatial-memory decay and dual-task interference on perturbation-evoked reach-to-grasp reactions in the absence of online visual feedback. Human Movement Science. 32 (2), 328-342 (2013).
- Dakin, C. J., Bolton, D. A. E. Forecast or Fall: Prediction's Importance to Postural Control. Frontiers in Neurology. 9, 924 (2018).
- Slobounov, S., Cao, C., Jaiswal, N., Newell, K. M. Neural basis of postural instability identified by VTC and EEG. Experimental Brain Research. 199 (1), 1-16 (2009).
- Maki, B. E., McIlroy, W. E. Cognitive demands and cortical control of human balance-recovery reactions. Journal of Neural Transmission. 114 (10), 1279-1296 (2007).
- Bolton, D. A. The role of the cerebral cortex in postural responses to externally induced perturbations. Neuroscience and Biobehavioral Reviews. 57, 142-155 (2015).
- Rossi, S., Hallett, M., Rossini, P. M., Pascual-Leone, A. Safety of TMS Consensus Group Safety, ethical considerations, and application guidelines for the use of transcranial magnetic stimulation in clinical practice and research. Clinical Neurophysiology: official journal of the International Federation of Clinical Neurophysiology. 120 (12), 2008-2039 (2009).
- Bolton, D. A. E., et al. Motor preparation for compensatory reach-to-grasp responses when viewing a wall-mounted safety handle. Cortex. 117, 135-146 (2019).
- Goode, C., Cole, D. M., Bolton, D. A. E. Staying upright by shutting down? Evidence for global suppression of the motor system when recovering balance. Gait & Posture. 70, 260-263 (2019).
- Rydalch, G., Bell, H. B., Ruddy, K. L., Bolton, D. A. E. Stop-signal reaction time correlates with a compensatory balance response. Gait & Posture. 71, 273-278 (2019).
- Gibson, J. J. . The Ecological Approach To Visual Perception. , (1979).
- Majid, D. S. A., Cai, W., George, J. S., Verbruggen, F., Aron, A. R. Transcranial Magnetic Stimulation Reveals Dissociable Mechanisms for Global Versus Selective Corticomotor Suppression Underlying the Stopping of Action. Cerebral Cortex. 22 (2), 363-371 (2012).
- Cohen, R. G., Nutt, J. G., Horak, F. B. Errors in postural preparation lead to increased choice reaction times for step initiation in older adults. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 66 (6), 705-713 (2011).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。