
Method Article
Una tecnica di magra e di rilascio modificata per enfatizzare l'inibizione della risposta e la selezione dell'azione in equilibrio reattivo
In questo articolo
Riepilogo
Qui offriamo un protocollo che permette all'utente di cambiare selettivamente affordances e/o vincoli sui movimenti che sono rilevanti per il recupero dell'equilibrio dopo la perturbazione posturale.
Abstract
La valutazione dell'equilibrio reattivo impone tradizionalmente un certo tipo di perturbazione alla posizione o all'andatura eretta seguita dalla misurazione del comportamento correttivo risultante. Queste misure includono risposte muscolari, movimenti degli arti, forze di reazione al suolo, e anche misure neurofisiologiche dirette come l'elettroencefalografia. Utilizzando questo approccio, ricercatori e medici possono dedurre alcuni principi di base per quanto riguarda il modo in cui il sistema nervoso controlla l'equilibrio per evitare una caduta. Un limite al modo in cui queste valutazioni sono attualmente utilizzate è che enfatizzano pesantemente le azioni riflessive senza alcuna necessità di rivedere le reazioni posturali automatiche. Un'attenzione così esclusiva su queste reazioni altamente stereotipate non riuscirebbe ad affrontare adeguatamente come possiamo modificare queste reazioni in caso di necessità (ad esempio, evitare un ostacolo con una fase di recupero). Questa sembra essere un'evidente omissione se si considera l'enorme complessità degli ambienti che affrontiamo quotidianamente. Nel complesso, lo status quo quando si valuta il controllo neurale dell'equilibrio non riesce a esporre veramente come le risorse cerebrali superiori contribuiscono a prevenire le cadute in ambienti complessi. Il presente protocollo offre un modo per richiedere la soppressione delle reazioni automatiche, ma inappropriate di equilibrio correttivo, e forzare una selezione tra le scelte di azione alternative per recuperare con successo l'equilibrio dopo la perturbazione posturale.
Introduzione
Nonostante la correlazione riconosciuta tra cadute e declino cognitivo1,2,3, un divario importante persiste nel capire ciò che il cervello fa effettivamente per aiutarci a evitare una caduta. In teoria, le esigenze cognitive sarebbero accentuate con l'aumentare della complessità ambientale e nelle situazioni in cui abbiamo bisogno di un comportamento istintivo rivistivo. Tuttavia, la maggior parte dei test di equilibrio non riescono a tassare efficacemente la funzione cerebrale superiore, invece sottolineando le reazioni di raddalio riflessivo. Mentre fattori come la velocità di risposta sono essenziali per prevenire una caduta, fattori cognitivi aggiuntivi, come il controllo inibitorio e/o la capacità di selezionare un'azione appropriata in base a un determinato contesto possono anche essere importanti in determinate situazioni. Di conseguenza, uno dei motivi per cui potremmo non riuscire a capire il ruolo del cervello nell'equilibrio reattivo è dovuto ai protocolli di ricerca attualmente in uso. Rogers e altri hanno recentemente riassunto i diversi modi in cui il controllo dell'equilibrio è stato valutato utilizzando la perturbazione esterna4. Questi metodi includono la traduzione della piattaforma, inclinazioni e/o gocce, così come l'uso di sistemi automatizzati che spingono, tirano, o rimuovono il supporto posturale. Nonostante la grande varietà di tecniche utilizzate per interrompere l'equilibrio eretto, le reazioni correttive che ne derivano sono quasi sempre fatte in un ambiente libero, riducendo così al minimo i vincoli di movimento. Qui, proponiamo un metodo in cui i processi cognitivi sono necessari per ignorare l'azione prepotente e selezionare risposte adeguate tra alternative in un compito di equilibrio reattivo.
Un modo comune per testare l'equilibrio reattivo consiste nell'imporre perturbazioni posturali relativamente piccole che possono essere contrastate utilizzando una reazione di supporto fisso (tipicamente piedi sul posto)5,6,7,8,9. Comparativamente meno studi si sono concentrati sulle reazioni di equilibrio di cambiamento di supporto in risposta a perturbazioni tramite tirate, traslazione della piattaforma e rilascio da un cavo di supporto Ad esempio, vedere Mansfield et al.10. L'importanza di quest'ultimo gruppo può essere apprezzata riconoscendo che quando le perturbazioni sono di grandi dimensioni, le reazioni di cambiamento di sostegno sono l'unica opzione per recuperare la stabilità11. Infatti, anche per le perturbazioni più piccole che potrebbero essere gestite utilizzando le strategie piedi-in-place (cioè, dell'anca e/o della caviglia), le persone spesso preferiscono fare un passo quando viene data la scelta11. Il valore nello studio di tali reazioni di cambiamento di supporto sta non solo nel fatto che una maggiore grandezza della perturbazione deve essere contrastata, ma anche le sfide che emergono quando si riposizionano gli arti per stabilire una nuova base di supporto. La presenza di affordances e/o vincoli di azione sono una parte regolare di molte impostazioni del mondo reale. In questo modo un processo di selezione per stabilire una nuova base di supporto quando si verifica una perdita di equilibrio. Per adattare il comportamento ad ambienti complessi, c'è una maggiore domanda di risorse cerebrali più elevate. Ciò è particolarmente vero quando gli arti devono stabilire una nuova base di supporto. Sottolineare ed esporre i ruoli cognitivi in equilibrio reattivo la necessità di reintrodurre il disordine e forzare una strategia di cambiamento di supporto con gli arti sembra logica.
Un modo semplice per fornire una perturbazione posturale indotta esternamente è la tecnica di lean & release, in cui un individuo viene improvvisamente rilasciato da una magra in avanti supportata. Questo approccio consente la valutazione delle reazioni compensative per evitare una caduta in avanti ed è stato utilizzato con successo in popolazioni sane e cliniche12,13,14. Anche se la tecnica lean & release è un po 'semplice, offre preziose informazioni sulla capacità di bilanciamento reattivo (ad esempio, quanto velocemente qualcuno può avviare una fase di recupero, o per determinare il numero di passaggi necessari per recuperare la stabilità). Per gli scopi attuali, la tecnica lean & release fornisce un modo semplice per esplorare i ruoli cognitivi in equilibrio reattivo perché molte delle caratteristiche di perturbazione sono tenute costanti. Ciò fornisce un maggiore controllo sperimentale sulle variabili specificamente rilevanti per la selezione dell'azione e l'inibizione della risposta. Mentre altri modi di perturbazione posturale in genere si basano sull'imprevedibilità in termini di direzione di perturbazione, ampiezza e tempismo, l'ambiente circostante è sempre costante. Anche negli studi in cui i blocchi delle gambe sono stati utilizzati per enfatizzare le reazioni reach-to-grasp15 i blocchi sono fissati in posizione senza la necessità di adattare rapidamente i comportamenti di stepping in base alla presenza o all'assenza di un blocco di gambe. Con il metodo attualmente proposto, possiamo cambiare l'ambiente in un modo che richiede adattamento comportamentale per evitare una caduta.
Al di là delle impostazioni di laboratorio che espongono in modo inadeguato i ruoli cognitivi in equilibrio reattivo, un altro problema importante è una forte dipendenza da misure esterne come l'insorgenza muscolare, le forze di reazione al suolo e l'acquisizione del movimento video per dedurre i processi neurali. Mentre queste misure sono preziose, l'esclusiva dipendenza da tali misure non riesce a fornire una visione diretta dei meccanismi neurali sottostanti che contribuiscono all'equilibrio. Questo problema è aggravato quando si considera che gran parte di ciò che il cervello può fare per prevenire una caduta in ambienti complessi probabilmente accade prima della caduta. I ruoli predittivi nella prevenzione dell'autunno sono stati recentemente discussi in modo più approfondito16. Le indicazioni di ricerca includono la previsione dell'instabilità futura17, la costruzione di mappe visuospatiali mentre ci muoviamo attraverso il nostro ambiente18, e possibilmente formando contingenze basate sull'ambiente anche senza presunzione di un autunno19. Rivelare tale preparazione sarebbe del tutto inaccessibile senza l'uso di sonde neurofisiologiche dirette.
L'approccio lean & release modificato come attualmente proposto offre un mezzo per superare alcune delle limitazioni esistenti menzionate. Questo viene fatto utilizzando uno scenario di test in cui gli arti sono necessari per stabilire una nuova base di supporto in un ambiente che richiede la scelta. Questo approccio è potenziato includendo misure dirette dell'attività cerebrale (ad esempio, stimolazione magnetica transcranica, TMS) sia prima che dopo la perturbazione posturale, che può integrare le misure esterne della produzione di forza e della cattura del movimento. Questa combinazione di caratteristiche sperimentali rappresenta un'importante innovazione nel campo per esporre come il cervello contribuisce all'equilibrio in ambienti complessi in cui sono necessarie inibizioni di risposta e la selezione di azioni tra le opzioni per prevenire una caduta. Qui dimostriamo un nuovo metodo per testare l'equilibrio reattivo in un ambiente che enfatizza la necessità che i processi cognitivi adattino il comportamento per evitare una caduta. La combinazione di ostacoli e affordances per l'azione forza la necessità di inibizione della risposta, azione mirata, e la selezione della risposta tra le opzioni. Inoltre, dimostriamo un preciso controllo temporale sull'accesso visivo, la temporizzazione delle sonde neurali, la modifica dell'ambiente di risposta e l'insorgenza della perturbazione posturale.
Protocollo
Tutte le procedure sono state approvate dall'Institutional Review Board della Utah State University e sono state condotte in conformità con la Dichiarazione di Helsinki.
1. Screening dei partecipanti
- Chiedi ai partecipanti di fornire un consenso informato scritto alle procedure prima della prova.
- Per i test con TMS, i partecipanti allo screening prima dei test al fine di valutare la loro idoneità per TMS utilizzando linee guida sviluppate da un gruppo di esperti20.
2. Acquisizione dati: elettromiografia (EMG)
- Registrare EMG utilizzando elettrodi di superficie e amplificare i segnali (guadagno 1.000; vedi Tabella dei materiali).
- Acquisire dati e filtro passabanda (10-1.000 Hz) utilizzando un'interfaccia di acquisizione dati e un software appropriato (vedere Tabella dei materiali). Utilizzare questo dispositivo e il software per controllare i vari motori, il rilascio dei cavi e gli occhiali occlusion, come descritto più avanti nei metodi.
- Abrade delicatamente la superficie della pelle e pulire con l'alcol sopra le posizioni muscolari di destinazione. Fissare gli elettrodi EMG di superficie sui muscoli bersaglio utilizzando nastro adesivo a due lati e fissare ulteriormente utilizzando il prewrap per garantire che gli elettrodi rimangano fissi, soprattutto durante le risposte rapide con le braccia e le gambe.
- Raccogliere i dati EMG da due muscoli intrinseci della mano sulla mano destra (primo interosseus dorsale, FDI e opsiens pollicus, OP) e dorsiflexor alla caviglia su entrambe le gambe (tibialis, TA anteriore).
NOTA: Questi particolari muscoli sono stati selezionati in base alla loro rilevanza per un'azione reach-to-grasp o un passo in avanti, ma altri muscoli potrebbero essere selezionati in base alle esigenze.
3. Attrezzature di prova di bilanciamento

come illustrato nella Figura 1. Lean & rilasciare setup con blocchi di gamba. In questo esempio, un blocco gamba è impostato in posizione aperta, mentre l'altro è impostato per evitare un passo. Questi blocchi vengono spostati tramite motori controllati dal computer (scatole grigie attaccate ai posti di supporto). Anche le coperture delle maniglie vengono spostate in blocchi o consentono una risposta reach-to-grasp. Qui, le coperture sono staccate per consentire la vista completa della maniglia. Il magnete di rilascio è visibile sulla parete posteriore. Tutto il cablaggio si alimenta attraverso la piattaforma di legno stessa ed entra nella scatola del circuito grigio situato nell'angolo posteriore. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

come illustrato nella Figura 2. Lean & rilasciare setup con piastre di forza. Questa figura mostra come tre piastre di forza possono essere facoltativamente incorporate nella piattaforma di legno. Se non sono necessarie piastre di forza, è possibile posizionare le spine di legno. Questi tappi sono visibili, appoggiati alla parete laterale. Questa immagine mostra anche l'imbracatura di sicurezza indossata dai partecipanti. Questa imbracatura è fissata al soffitto per fungere da meccanismo di sicurezza se il partecipante non riesce a recuperare il proprio equilibrio da solo. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Sistema di lean & release modificato
- Utilizzare un sistema di cavi su misura, snello e di rilascio per imporre perturbazioni in avanti (vedere Figura 1 e Figura 2).
- Chiedi ai partecipanti di stare in posizione di magra in avanti con i piedi di circa la larghezza dell'anca (vedi Figura 3). Mantenere questa magra in avanti utilizzando un cablaggio di corpo attaccato ad un cavo, che viene poi fissato alla parete dietro di loro. Fissare il cavo alla parte posteriore dell'imbracatura (livello mediotocico circa). Fissare il cavo di supporto alla parete da un magnete. Il magnete verrà brevemente disattivato per rilasciare il cavo.
- Rendere imprevedibili per il partecipante le procedure di prova specifiche (ad esempio, quando il cavo viene rilasciato e l'insorgenza del rilascio del cavo). Controllare l'esatta tempistica del rilascio del cavo tramite comandi del computer preimpostati in una configurazione software. Questa configurazione consentirà di controllare la tempistica del rilascio del cavo in modo che possa essere randomizzato tra le prove.
NOTA: la configurazione software che controlla tutti i dispositivi sperimentali (ad esempio, l'attivazione del motore per posizionare un blocco gamba) imposta la condizione di prova specifica (ad esempio, se un blocco gamba è presente o meno). Questo può essere programmato per randomizzare le condizioni o consegnarle in blocchi per controllare il livello di prevedibilità. - Oltre a questo cavo di rilascio collegato alla parte posteriore del cablaggio, anche i partecipanti sicuri a un cavo di supporto appeso al soffitto. Questo cavo failsafe non fornisce alcun supporto per il peso corporeo a meno che non sia assolutamente necessario. Se un partecipante non è in grado di recuperare l'equilibrio da solo, il cavo lo cattura prima di cadere a terra.
- A causa dell'importanza di informazioni visive affidabili, verificare che i partecipanti possano effettivamente vedere il blocco della maniglia e della gamba quando indossano gli occhiali. Iniziare ogni prova istruendo ai partecipanti di guardare direttamente un punto fisso sul pavimento, circa 3 m di fronte a loro, tenendo la testa in una posizione comoda. Posizionare i partecipanti in modo che il loro sguardo sia impostato per visualizzare la maniglia nel campo visivo periferico e la parte superiore dell'ostacolo.
- Posizionare il corpo per assicurarsi che la maniglia sia all'interno della portata comprensibile. Chiedi al partecipante di appoggiare in avanti mantenendo entrambi i piedi a contatto con il pavimento. Ciò richiederà una rotazione intorno alla caviglia, mentre il resto del corpo rimane in linea retta.
- Determinare la posizione di magra specifica come angolo minimo magra in cui è necessario un passo in avanti per recuperare il bilanciamento quando il cavo viene rilasciato. Questo è un processo iterativo per trovare un angolo di soglia magra all'articolazione della caviglia, che è l'angolo in cui il partecipante non è più in grado di prevenire una caduta in avanti utilizzando una reazione piedi-in-place. Una volta che questo è stabilito, verificare l'angolo di magra durante il test utilizzando la goniometria.
- Convenienza e vincoli sulle risposte al saldo compensativo
- Fissare una maniglia di sicurezza sul muro accanto ai partecipanti sul loro lato destro. Utilizzare una copertura motorizzata per controllare l'accesso a questa maniglia. Se la maniglia viene scoperta, quando i partecipanti vengono rilasciati dalla loro magra in avanti supportata può essere utilizzata per ritrovare l'equilibrio.
- Durante le prove in cui la maniglia è scoperta, posizionare un blocco gamba davanti alle gambe del partecipante. Il blocco delle gambe impedisce un passo, ma non è rigidamente impostato in posizione, il che significa che può essere spostato quando calciato. Programmare il blocco gamba per consentire la libera circolazione e costruirlo con materiale conforme per evitare lesioni.
NOTA: I blocchi delle gambe sono stati costruiti per forzare una decisione di passo 'all-or-none' dato che si alzano quasi 30 pollici da terra (livello medio-coscia sulla maggior parte degli individui). Per i ricercatori interessati a un blocco più sfumato di una fase di recupero, questi dispositivi potrebbero essere modificati per utilizzare un ostacolo più piccolo/più corto che consentirebbe quindi un passo adattato per eliminarli. - Utilizzare un telo nero per coprire la maniglia e bloccarlo dalla vista su alcune prove. La maniglia rimarrà montata nella stessa posizione, ma sarà fisicamente coperta per impedire l'accesso visivo diretto e per evitare qualsiasi presa di supporto. Quando questa maniglia di supporto è coperta, rimuovere il blocco gamba per consentire una reazione passo se necessario.
- Controllo della visione
- Limitare la visione all'intervallo di tempo appena prima della perturbazione posturale e del controllo tramite occhiali a cristalli liquidi (vedi Tabella dei materiali). Quando sono chiusi, gli occhiali impediscono l'accesso alla scena visiva in modo che i partecipanti non siano consapevoli della prossima condizione di risposta.
- Modificare la configurazione specifica del blocco gamba e gestire la disponibilità per ogni prova mentre gli occhiali sono chiusi in modo che i partecipanti devono percepire rapidamente l'ambiente una volta che gli occhiali aperti. Spostare il coperchio della maniglia e il blocco gamba in posizione tramite servo motori innescati dal computer all'inizio di ogni prova. Chiedi ai partecipanti di indossare tappi per le orecchie e di far muovere continuamente i motori durante il periodo di occlusione visiva per evitare qualsiasi segnale avanzato per le condizioni imminenti.
4. Progettazione sperimentale
- Prima del test, acquisire brevemente ai partecipanti come raggiungere la maniglia e fare un passo avanti da una posizione di macizola.
- Fornire ai partecipanti una conoscenza completa della condizione di pratica imminente e assicurarsi che non vi sia alcuna incertezza. Istruire i partecipanti che una volta che gli occhiali sono aperti, vedranno la maniglia coperta, e il percorso di passo sarà chiaro. Poco dopo, il cavo di supporto si rilascerà e dovranno fare un passo rapidamente per evitare di cadere in avanti.
- Utilizzare istruzioni simili per quanto riguarda se la maniglia è disponibile o meno per afferrare per evitare un passo.
- Durante i test e la pratica, istruisci i partecipanti a rimanere rilassati a meno che non venga richiesto di muoversi con un improvviso rilascio via cavo.
NOTA: In media, i partecipanti richiedono circa 10 tentativi di pratica prima dell'inizio dei test formali.
- Modificare in modo casuale l'impostazione di risposta tra le prove. Se rilasciate dal cavo di supporto, i partecipanti devono recuperare stabilità raggiungendo la maniglia di sicurezza montata a parete o facendo un passo avanti se il percorso del passo è chiaro.
- Chiudere sempre gli occhiali occlusion all'inizio di ogni prova, in cui l'impostazione della risposta verrà modificata. Chiudere gli occhiali per un periodo casuale (di solito circa 3-4 s) per consentire l'impostazione di cambiare.
- Quando gli occhiali si aprono, fornire una delle due possibili impostazioni di risposta: (1) il blocco gamba è presente e la maniglia di supporto è presente, o (2) nessun blocco gamba è presente e non è presente alcuna maniglia di supporto.
NOTA: Nella prima condizione, una maniglia di supporto è disponibile a una distanza di distanza confortevole e il blocco gamba impedisce un passo. Questa impostazione impone un contesto in cui l'unica opzione disponibile è quella di afferrare rapidamente la maniglia di supporto disponibile con il braccio destro. La seconda condizione consente un passaggio di ripristino impedendo l'utilizzo dell'handle di supporto. - Nelle prove in cui si verifica una perturbazione, rilasciare il cavo poco dopo l'apertura degli occhiali. Questo periodo di ritardo varia in base ai requisiti dello studio, ma varia da 200 a 1.000 ms.
- Per alcune prove, non rilasciare per agire come una prova di cattura. Ciò consente di evitare risposte anticipative basate solo sulla visione.
- Fai in modo che ogni prova duri 10 s, con una breve pausa tra una prova e l'altro per consentire ai partecipanti di reimpostarsi in base alle esigenze. Concedi ai partecipanti un breve periodo di riposo tra ogni blocco di prova e consenti loro di sedersi. Il progetto sperimentale di base è illustrato nella Figura 3 (in basso).
NOTA: il numero totale di prove è variato in base alle esigenze di ogni studio, ma tende a includere circa 100 prove suddivise in tre o quattro blocchi di prova.

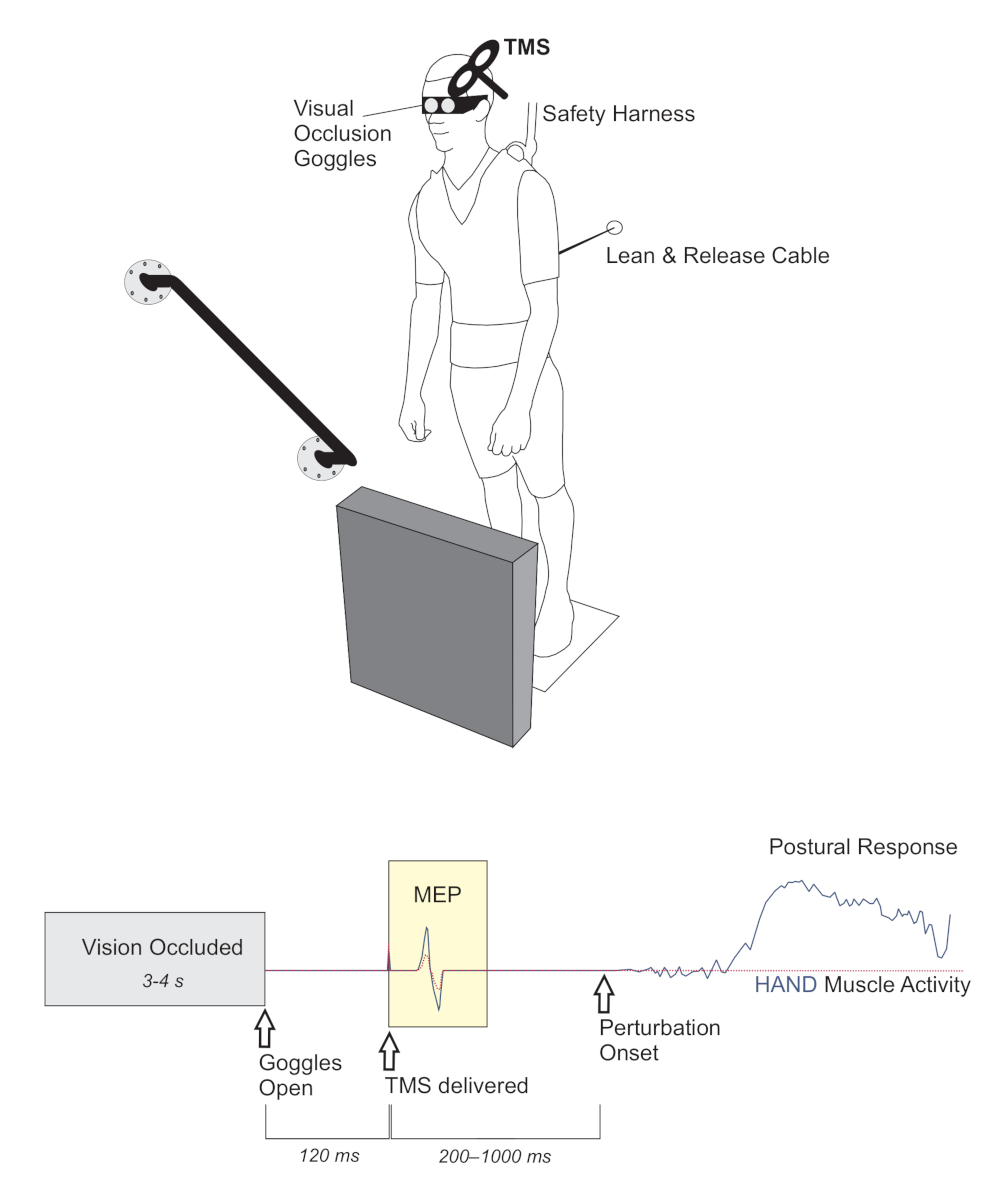
come illustrato nella figura 3. Metodo basato su TMS per studiare l'impatto della percezione delle affordance ambientali e/o dei vincoli sulla preparazione motoria. IN ALTO. Un apparato snello e di rilascio ha rilasciato i partecipanti in modo imprevedibile (solo blocchi di prova perturbazione). La magnitudine della perturbazione richiedeva una rapida reazione di cambio di supporto, usando il braccio o la gamba per ristabilire una base stabile di supporto raggiungendo una presa a mano sicura o facendo un passo avanti. Tra una prova e l'altro, la visione è stata occlusa usando occhiali di occlusione a cristalli liquidi e gli oggetti in primo piano sono stati riorganizzati a caso. IN FONDO. La sequenza temporale illustra quando l'accesso visivo all'ambiente è diventato disponibile e la temporizzazione delle sonde TMS relative sia all'accesso visivo che alla perturbazione. L'ampiezza picco-picco della risposta muscolare al TMS (cioè, il potenziale evocato dal motore, MEP) ha fornito un indice di eccitabilità corticospinale nel periodo di tempo prima della perturbazione. Questa figura presenta i dati teorici di risposta per dimostrare l'impatto ipotizzato di un'azione della mano (linea solida, blu) rispetto a una prova in cui la maniglia è coperta (linea punteggiata, rossa). In questa figura, entrambe le prove/condizioni sono sovrapposte per illustrare l'effetto ipotetico della preparazione della produzione motoria per facilitare o sopprimere le azioni potenziali sulla base di un particolare contesto ambientale. Adattato dalla Figura 1 a Bolton et al.21. Si noti che TMS è stato utilizzato per sondare l'eccitabilità corticospinale in questo esempio. Tuttavia, questo ha solo lo scopo di fornire una rappresentazione di base della sequenza di eventi utilizzando questa lean & release modificata. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
5. Protocollo TMS (opzionale)
- Fornire TMS a impulso singolo sulla rappresentazione corticale del motore a mano, mentre i partecipanti sono supportati in una magra in avanti. Fornire impulsi TMS poco dopo l'apertura degli occhiali, ma prima di qualsiasi movimento per studiare l'impatto della visualizzazione dell'ambiente sul set del motore. Vedere Figura 3 per visualizzare la sequenza di eventi durante una versione di prova, incluso quando TMS viene recapitato.
- Impostare i tempi per la consegna TMS in base alla domanda di ricerca. Nei risultati rappresentativi, la stimolazione variava tra 100 ms e 200 ms post-visione. Oltre alle impostazioni di risposta elencate in precedenza, si intersecano casualmente le prove di riferimento "no-vision" durante i test per fornire TMS senza aprire gli occhiali. Lo scopo di questa condizione è quello di fornire una linea di base per eventuali cambiamenti relativi all'attività nell'attività motoria (ad esempio, aumento dell'eccitazione).
NOTA: ulteriori dettagli sulle procedure specifiche di TMS sono disponibili in Bolton et al.21 e Goode etal. - Fornire stimoli magnetici alla corteccia motoria primaria (M1) con la bobina stimolante orientata di circa 45 gradi al piano sagittale (vedi Tabella dei materiali). Applicare gli stimoli nella posizione ottimale per ottenere un potenziale di motore evocato (MEP) nel muscolo FDI sulla mano destra (cioè, il motore 'hotspot').
- Una volta trovato l'"hotspot", determinare che viene determinata un'intensità di stimolo di prova. Per gli attuali scopi di ricerca, questa è l'intensità dello stimolo in cui l'eurodeputato medio è di circa 1–1,5 mV da picco a picco. Fissare la bobina TMS su questa posizione e reimpostare la posizione della bobina se si verifica il movimento della testa (ad esempio, dopo il rilascio del cavo). Determinare l'intensità dello stimolo di prova mentre i soggetti stanno in avanti magra per tenere conto di qualsiasi influenza dello stato posturale sull'eccitabilità corticospinale.
Risultati
Tutti gli studi esemplari presentati sono stati condotti con giovani donne e uomini tra i 18 e i 30 anni. La dimensione totale del campione per ogni studio era la seguente: l'esempio 1 (Rydalch et al.23) includeva 12 partecipanti, l'esempio 2 (Bolton et al.21) includeva 63 partecipanti e l'esempio 3 (Goode et al.22) includeva 19 partecipanti. Il lettore deve fare riferimento agli studi completi per i dettagli sui metodi e le analisi.
Esempio 1
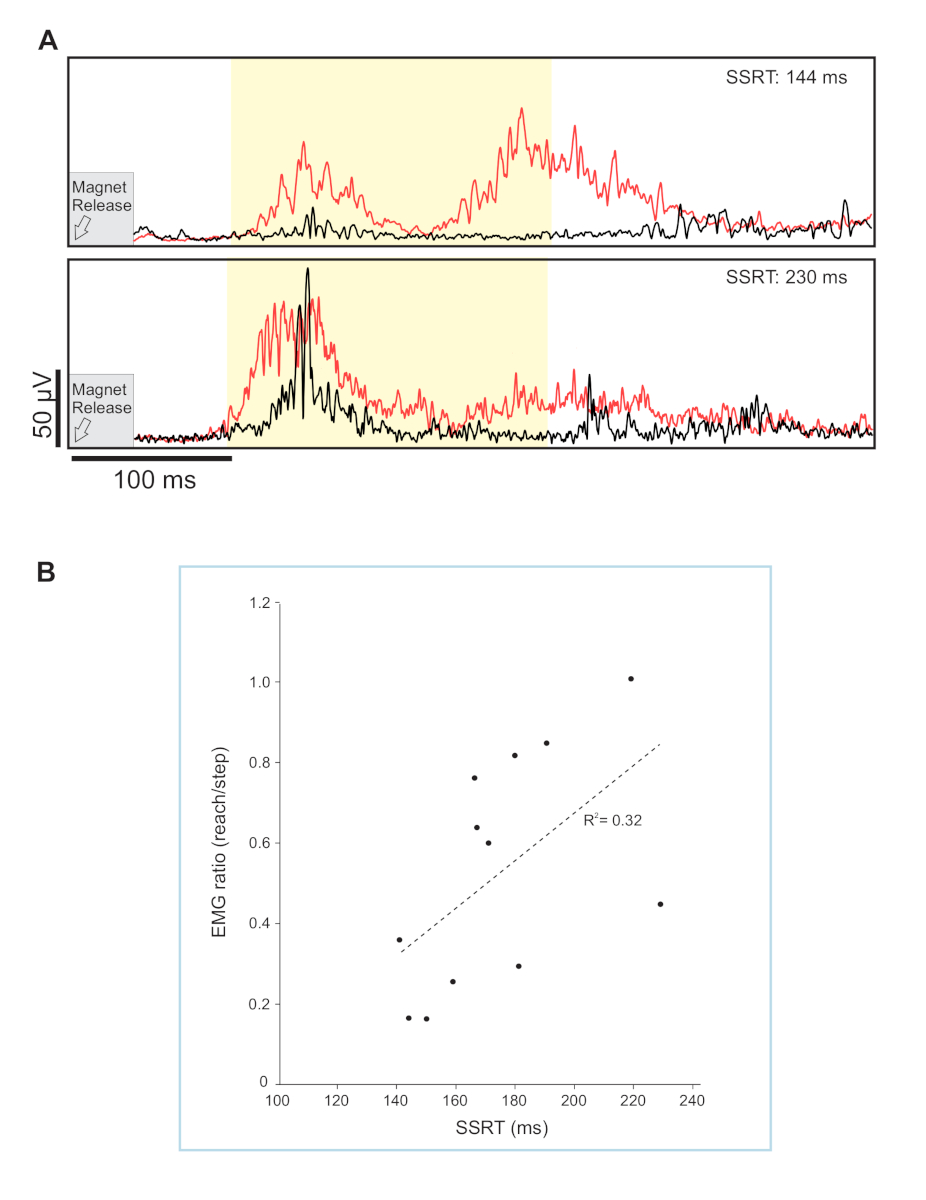
Bloccare una rapida fase di recupero, in particolare quando il passo è stato reso automatico da frequenti ripetizioni, ha permesso la valutazione dell'inibizione della risposta in un contesto posturale. Qui, abbiamo confrontato la risposta muscolare della gamba quando un passo in avanti è stato consentito o ostruito23. La risposta muscolare dalla gamba del passo è stata confrontata tra le prove in cui il partecipante dovrebbe raggiungere rispetto alle prove in cui dovrebbero fare un passo. Ciò è stato ottenuto confrontando la grandezza di risposta dei dosfori alla caviglia (tibialis anteriore) durante le prove reach-to-handle contro step. In particolare, l'EMG integrato su una finestra di 200 ms (cioè da 100 ms a 300 ms dopo la perturbazione) è stato utilizzato per calcolare un rapporto di risposta muscolare. Un valore più piccolo indicava una maggiore capacità di astenersi dal passo come descritto in dettaglio in Rydalch et al.23. Utilizzando la grandezza della risposta muscolare, la nostra intenzione era quella di fornire un indicatore sensibile per una tendenza a rispondere con la gamba. In questo esempio, l'obiettivo del nostro studio era quello di determinare se l'inibizione della risposta misurata con un test cognitivo seduto (cioè, l'attività di stop signal, SST) correlava con le prestazioni in un'attività di bilanciamento reattivo in cui era necessaria la soppressione di una fase di recupero del bilanciamento. Nell'attività di saldo sono state raccolte 256 prove, di cui il 30% ha utilizzato un blocco per le gambe. Nella Figura 4Aviene evidenziata la media delle forme d'onda degli individui che si trovavano alle estremità opposte del continuum per sopprimere l'attività delle gambe correlate al passaggio. Lo scatterplot in Figura 4B illustra una correlazione piccola, ma significativa tra la capacità di sopprimere un passo bloccato e l'inibizione della risposta misurata dal tempo di reazione del segnale di arresto.
Nell'interpretare questi risultati, è importante riconoscere che l'SST (descritto nell'Appendice), e in effetti la maggior parte dei test cognitivi, si basano su risposte semplicistiche (spesso movimenti delle dita) effettuate dai partecipanti seduti in risposta a segnali imperativi visualizzati sullo schermo di un computer. Questo studio di Rydalch et al. ha affrontato se la capacità di interrompere una risposta prepotente è stata preservata attraverso una prova standard di inibizione della risposta seduta rispetto a un test di equilibrio reattivo in cui le misure compensative devono essere occasionalmente soppresse23. I risultati hanno mostrato una correlazione tra il risultato del test cognitivo (tempo di reazione del segnale di arresto) e il passo compensativo, il che suggerisce che la capacità di arresto di un individuo si generalizza tra compiti diversi.

come illustrato nella Figura 4. Risposta media gamba passo. (A) Le forme d'onda medie sono mostrate per il tibialis anteriore nella gamba del passo. Le prove a gradini sono mostrate in rosso e raggiungono le prove in nero. Dati di risposta muscolare esemplari mostrati per due partecipanti con un tempo di reazione al segnale di arresto rapido (in alto) o lento (in basso). Questo tempo di reazione del segnale di arresto offre una misura di millisecondo della capacità di arresto. La risposta muscolare precoce (EMG integrata) è stata misurata da 100-300 ms (regione ombreggiata di colore giallo chiaro). (B) Grafico a dispersione che mostra la correlazione tra il rapporto di risposta muscolare e il tempo di reazione stop-segnale (SSRT) al ritardo visivo di 400 ms, r - 0,561; p - 0,029. Adattato dalle figure 3 e 5, Rydalch et al.23. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
Esempio 2
Questo studio esemplifica come la nostra configurazione lean & release modificata quando combinata con TMS possa essere utilizzata per studiare la preparazione del motore in base alla visione. Il concetto di affordances (originariamente proposto da Gibson24) è stato testato in un contesto posturale permanente, per determinare se l'eccitabilità corticospinale di un muscolo della mano (utilizzato per la presa) è stato facilitato durante la visualizzazione di una maniglia di supporto. La chiave di questo approccio è stata la valutazione di come lo stato eccitatorio del sistema motorio sia stato influenzato dalla sola visione. In particolare, gli impulsi TMS sono stati consegnati poco dopo l'apertura degli occhiali, ma prima di qualsiasi segnale di movimento (ad esempio, il rilascio del cavo). In questo modo solo l'attività motoria relativa alla scena visiva è stata analizzata mentre la risposta comportamentale alla perturbazione era secondaria. A differenza dello studio di cui sopra, che ha sottolineato la necessità di inibizione della risposta presentando più frequentemente la risposta al passo, questo studio ha usato una probabilità uguale di maniglia (raggiungere) contro nessuna maniglia (passo) per concentrarsi sull'innesco visivo dell'azione della mano. I risultati hanno indicato che la visualizzazione dell'handle comportava la facilitazione di un muscolo intrinseco della mano (cioè di presa), ma solo nella condizione di osservazione pura (Figura 5)21. NOTA: per i dati di esempio, l'acquisizione e il codice software di analisi, insieme alle note di orientamento, fare riferimento al framework scientifico aperto (https://osf.io/9z3nw/). Gli esempi 1 e 3 hanno utilizzato codice e procedure simili, con modifiche a stati specifici.

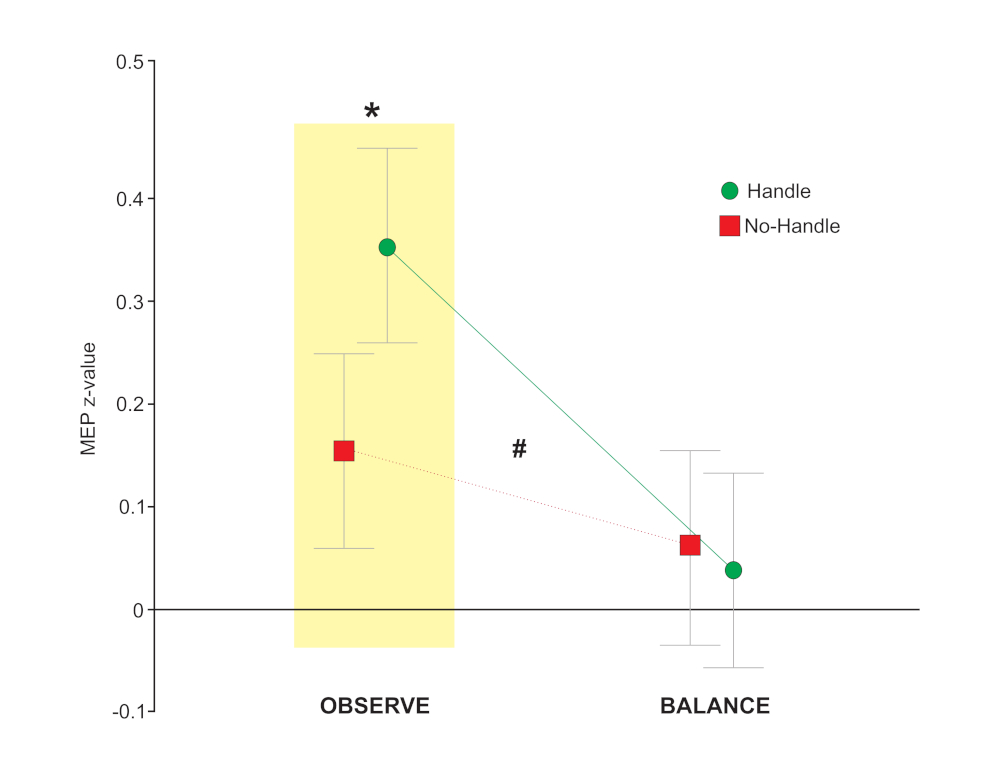
come illustrato nella Figura 5. Dati che mostrano la differenza di eccitabilità corticospinale per le prove REACH (cioè, maniglia) rispetto a STEP (cioè senza handle) in un muscolo intrinseco della mano mentre i partecipanti si trovavano in una magra supportata. Questo ha mostrato una maggiore attività nella mano quando il manico era presente e i partecipanti hanno semplicemente visto la maniglia (OBS), ma questo effetto è stato assente durante una bilancia separata (BAL) blocchi di prova in cui il cavo è stato rilasciato periodicamente. Le barre di errore mostrano l'errore standard della media. Misure ripetute a due vie ANOVA hanno rivelato un'interazione tra condizione #e convenienza, F1, 62 , 5,69,p , 0,020. Per affrontare le nostre ipotesi specifiche, abbiamo utilizzato confronti pianificati in precedenza per determinare se l'ampiezza dell'MEP nell'IDE fosse maggiore quando l'handle era presente all'interno di ogni condizione separatamente. Per l'ipotesi 1, i confronti pianificati sono stati utilizzati per confrontare i livelli di affordance (STEP, REACH) all'interno della condizione OBS e hanno rivelato un aumento significativo dell'ampiezza quando la maniglia era visibile, t121 , 2,62,p , 0,010. Per l'ipotesi 2, avevamo originariamente previsto un'interazione, ma nella direzione opposta a quella che è stata trovata. Il confronto pianificato della convenienza all'interno della condizione BAL non ha mostrato alcuna differenza significativa in relazione alla presenza di una maniglia, t121 - -0,46, p - 0,644. Adattato dalla Figura 5, Bolton etal. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
Esempio 3
Questo ultimo esempio sottolinea come abbiamo adattato questo dispositivo per studiare ancora una volta la preparazione motoria di un muscolo della mano basato sulla visione, ma focalizzato sulla necessità di sopprimere rapidamente l'azione delle gambe. In questa versione, il coperchio della maniglia era coperto in modo permanente, mentre solo il blocco gamba si muoveva. Come esempio 1, la probabilità di stop contro condizioni di passaggio è stata manipolata per incoraggiare un passaggio automatico. Dato che la maniglia non era più un'opzione in questo studio, il grado di magra in avanti misurato alla caviglia è stato leggermente ridotto (6s contro 10 gradi come nei due studi precedenti) per consentire una reazione di supporto fisso. L'uso specifico per questa versione del compito è stato quello di studiare il concetto di soppressione globale, che è stato precedentemente esplorato in attività sedute in cui sono state utilizzate pressioni dei pulsanti focali in risposta agli stimoli visivi presentati su un display del computer25. Come nell'esempio 2, TMS è stato consegnato per valutare l'eccitabilità corticospinale in un muscolo intrinseco della mano subito dopo l'accesso all'ambiente di risposta (ad esempio, blocco o nessun blocco), ma prima di qualsiasi segnale di movimento (cioè il rilascio del cavo). La logica per testare un muscolo intrinseco della mano in un compito che usava solo le risposte delle gambe era quello di vedere se un muscolo irrilevante compito avrebbe mostrato la prova di una soppressione generale in tutto il sistema motorio. I risultati illustrati di seguito in Figura 6 mostrano la prova di un arresto diffuso attraverso il sistema motore quando un passaggio automatico viene bruscamente fermato22.

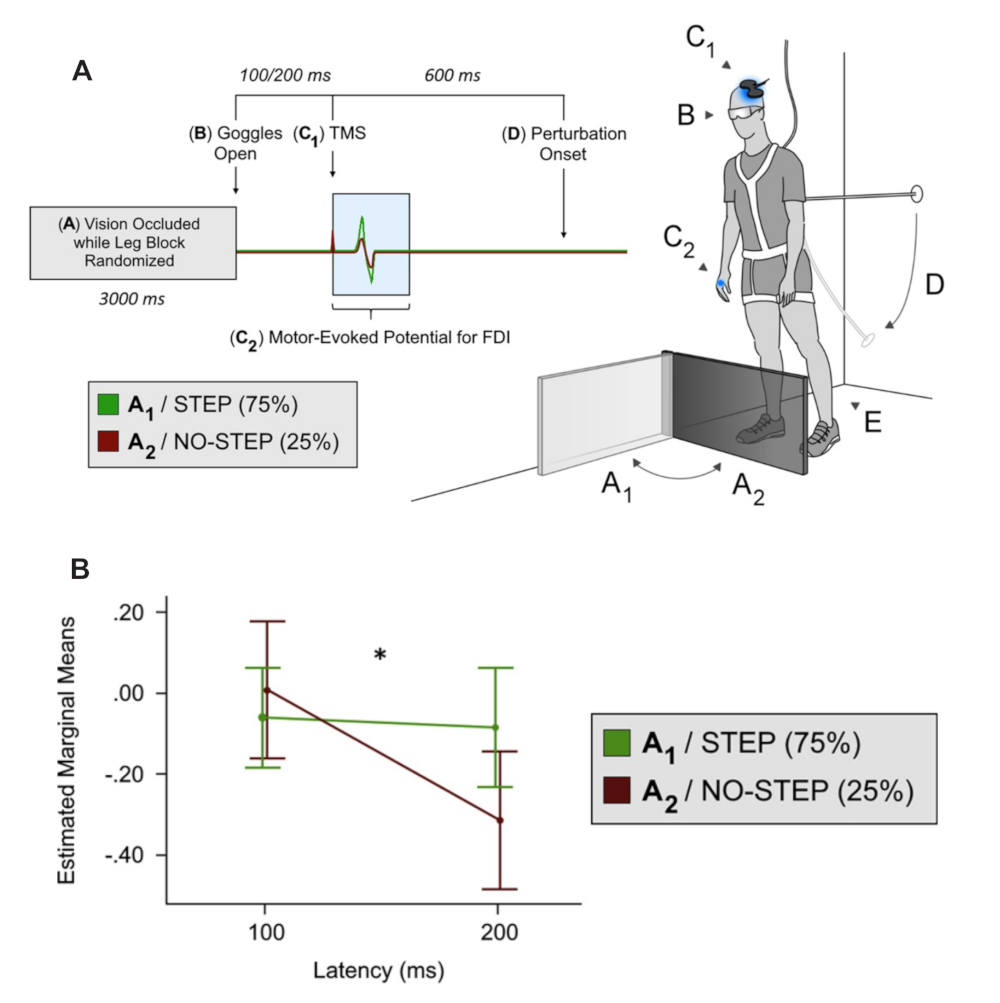
come illustrato nella Figura 6. Attività di lean & release modificata solo con blocco gamba (ad esempio, nessuna opzione per afferrare una maniglia di supporto). (A) Questa figura illustra la soppressione dell'ampiezza dell'MEP in un muscolo intrinseco della mano quando è stato presentato un blocco delle gambe (cioè la condizione NO-STEP). (B) Dalle misure ripetute ANOVA, la condizione di fase x interazione di latenza, F1,18 x 4,47, p , 0,049, era significativa. L'ispezione visiva del grafico a linee 2 rivela una diminuzione dell'ampiezza dell'euro deputato al tempo solo per la condizione NO-STEP e ciò è stato confermato con confronti di follow-up. In particolare, questi confronti hanno rivelato una diminuzione significativa a 200 ms rispetto a 100 ms t18 , 2,595,, p , 0,009 per la condizione NO-STEP. Al contrario, un confronto simile tra 200 ms e 100 ms per la condizione STEP non rivela alcuna differenza t18 : 0,346, p - 0,367. Adattato dalle figure 1 e 2, Goode et al.22. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
Discussione
Questo sistema lean & release modificato fornisce un nuovo modo per valutare i ruoli cognitivi in equilibrio reattivo. Come per la procedura standard lean & release, la direzione e l'ampiezza della perturbazione posturale sono prevedibili per il soggetto, mentre la tempistica del rilascio del cavo è imprevedibile. Ciò che è unico nell'approccio attuale è che l'accesso alla visione è controllato con precisione mentre il soggetto rimane fisso e l'ambiente di risposta viene modificato intorno a loro per creare diverse opportunità di azione e/o vincoli. Manipolando la presenza di ostacoli e affordances questo metodo enfatizza i processi cognitivi come il processo decisionale (cioè la selezione dell'azione) e l'inibizione della risposta in relazione al recupero dell'equilibrio.
Il metodo proposto ha il potenziale per fornire uno sguardo unico nel controllo neurale dell'equilibrio, ma pone alcune limitazioni. Ad esempio, quando si utilizza il metodo lean & release, il rilascio del cavo viene avviato da una magra in avanti, che richiede una fase di recupero pronunciata del bilanciamento rispetto ad altri metodi di perturbazione posturale esterna10. Inoltre, la direzione e la grandezza della perturbazione sono prevedibili, il che può portare all'attivazione anticipata dei muscoli che normalmente non sarebbero impegnati in scenari di caduta più realistici. Infine, la visione è temporaneamente occlusa prima del rilascio del cavo, che si discosta anche dall'esperienza quotidiana di un individuo. Queste caratteristiche rendono la nostra valutazione dell'equilibrio un po ' artificiale e possono impedire la generalizzazione tra diversi modi di perturbazione. È importante riconoscere che la generalizzabilità al mondo reale cade è sempre un problema quando si traggono inferenze su come l'equilibrio è controllato da un particolare metodo di valutazione. Infatti, attualmente non esiste un test completo comunemente riconosciuto per la capacità di equilibrio4. Ai fini attuali, una caduta in avanti consente di mantenere costanti le caratteristiche di perturbazione e le impostazioni di risposta manipolando specifiche richieste cognitive che sono spesso trascurate o inaccessibili nelle valutazioni di equilibrio tradizionali. Tale controllo sperimentale è vantaggioso, ma dovrebbe essere preso in considerazione nell'interpretazione dei risultati.
Come seconda limitazione, la costruzione delle attrezzature di prova e le competenze ingegneristiche necessarie possono rappresentare una sfida per implementare questo metodo. Tre studenti di ingegneria elettrica della Utah State University hanno costruito la piattaforma, creato l'elettronica e programmato microcontrollori per guidare i servomotori per il coperchio della maniglia e il blocco delle gambe. I costi di costruzione erano modesti (cioè, <15.000 dollari, escluse le piastre di forza montate nella piattaforma). Tuttavia, ciò può rappresentare una sfida a seconda delle risorse disponibili.
Informazioni specifiche sul controllo neurale dell'equilibrio sono state ottenute utilizzando questo approccio. Questi esempi indicano che la stimolazione cerebrale non invasiva può essere utilizzata per catturare il set di motori in base agli oggetti di visualizzazione in un contesto posturale e offrono una tecnica per valutare l'inibizione della risposta utilizzando le risposte muscolari. In particolare, la tecnica lean & release modificata potrebbe essere facilmente adattata per incorporare altre sonde neurofisiologiche come l'elettroencefalografia e la spettroscopia funzionale nel vicino infrarosso. Anche senza l'inclusione di misure neurali dirette, i progetti di studio che si concentrano interamente sulle forze esterne, l'attivazione muscolare e la cinematica possono fornire importanti informazioni sui marcatori comportamentali dei deficit cognitivi. Per esempio, Cohen et al.26hanno dimostrato un'interessante applicazione per l'utilizzo di lastre di forza per catturare i turni posturali anticipati durante un'attività di stepping reattiva. Nel loro studio, i deficit nell'inibizione della risposta negli adulti più anziani sono stati rivelati da spostamento inappropriato del peso, che a sua volta ha portato a ritardi nei tempi di fase di reazione scelta. Tale approccio potrebbe essere applicato al paradigma attuale per ottenere misure sensibili di errori di spostamento e stepping di peso.
Questo nuovo metodo viene compilato da un test di bilanciamento reattivo stabilito in cui i partecipanti vengono rilasciati da una lean snella supportata e ora include scenari che richiedono flessibilità comportamentale. I progetti di test adatti per esporre l'inibizione della risposta e la selezione dell'azione ci permettono di applicare concetti dalla psicologia cognitiva al dominio del controllo dell'equilibrio. Tale approccio è necessario per costruire sul riconoscimento che il declino cognitivo e la prevalenza caduta sono correlati, e per ottenere una comprensione meccanicistica su come le risorse cognitive prevenire le cadute. Presumibilmente questa configurazione potrebbe essere utilizzata non solo come strumento di ricerca, ma anche come mezzo per la formazione di ruoli cognitivi in equilibrio. Un obiettivo importante del lavoro in corso il nostro laboratorio è quello di capire come il cervello utilizza le informazioni contestuali per aggiornare quale movimento sarebbe più adatto per prevenire una caduta dato l'ambiente circostante. Cue come la disponibilità di una manofissa stabile o di una potenziale barriera passo può guidare quale risposta da fare in caso di necessità e può nascondere i processi predittivi del cervello16. In particolare, la capacità di utilizzare in modo appropriato queste informazioni può deteriorarsi con l'età se sono necessarie facoltà mentali come il controllo delle interferenze inibitorie o la memoria visivo-spaziale. Dato il rapporto tra declino cognitivo e cadute1–3, l'attuazione di progetti di studio che enfatizzano la necessità di integrare la rilevanza contestuale potrebbe fornire preziose informazioni sui deficit di equilibrio in molte popolazioni vulnerabili.
Divulgazioni
Gli autori non hanno nulla da rivelare.
Riconoscimenti
La ricerca riportata in questa pubblicazione è stata sostenuta dal National Institute on Aging of the National Institutes of Health sotto il award number R21AG061688. Il contenuto è di esclusiva responsabilità degli autori e non rappresenta necessariamente le opinioni ufficiali dei National Institutes of Health.
Materiali
| Name | Company | Catalog Number | Comments |
| CED Power1401 | Cambridge Electronic Design | Data acquisition interface | |
| Delsys Bagnoli-4 amplifier | Delsys | EMG equipment | |
| Figure-eight D702 Coil | Magstim Company Ltd | TMS coil | |
| Kistler Force Plates | Kistler Instrument Corp. | Multicomponent Force Plate Type 9260AA | Force plates |
| Magstim 200 stimulator | Magstim Company Ltd | TMS stimulation units | |
| PLATO occlusion spectacles | Translucent Technologies Inc | visual occlusion | |
| Signal software | Cambridge Electronic Design | Version 7 |
Riferimenti
- Mirelman, A., et al. Executive function and falls in older adults: new findings from a five-year prospective study link fall risk to cognition. PloS one. 7 (6), 40297 (2012).
- Herman, T., Mirelman, A., Giladi, N., Schweiger, A., Hausdorff, J. M. Executive control deficits as a prodrome to falls in healthy older adults: a prospective study linking thinking, walking, and falling. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 65 (10), 1086-1092 (2010).
- Saverino, A., Waller, D., Rantell, K., Parry, R., Moriarty, A., Playford, E. D. The Role of Cognitive Factors in Predicting Balance and Fall Risk in a Neuro-Rehabilitation Setting. PLOS ONE. 11 (4), 0153469 (2016).
- Rogers, M. W., Mille, M. -. L. Chapter 5 - Balance perturbations. Handbook of Clinical Neurology. 159, 85-105 (2018).
- Adkin, A. L., Campbell, A. D., Chua, R., Carpenter, M. G. The influence of postural threat on the cortical response to unpredictable and predictable postural perturbations. Neuroscience Letters. 435 (2), 120-125 (2008).
- Marlin, A., Mochizuki, G., Staines, W. R., McIlroy, W. E. Localizing evoked cortical activity associated with balance reactions: does the anterior cingulate play a role. Journal of Neurophysiology. 111 (12), 2634-2643 (2014).
- Horak, F. B., Nashner, L. M. Central programming of postural movements: adaptation to altered support-surface configurations. Journal of Neurophysiology. 55 (6), 1369-1381 (1986).
- Nashner, L. M. Fixed patterns of rapid postural responses among leg muscles during stance. Experimental Brain Research. 30 (1), 13-24 (1977).
- Varghese, J. P., Marlin, A., Beyer, K. B., Staines, W. R., Mochizuki, G., McIlroy, W. E. Frequency characteristics of cortical activity associated with perturbations to upright stability. Neuroscience Letters. 578, 33-38 (2014).
- Mansfield, A., Maki, B. E. Are age-related impairments in change-in-support balance reactions dependent on the method of balance perturbation. Journal of Biomechanics. 42 (8), 1023-1031 (2009).
- Maki, B. E., McIlroy, W. E. The role of limb movements in maintaining upright stance: the "change-in-support" strategy. Physical Therapy. 77 (5), 488-507 (1997).
- Lakhani, B., Mansfield, A., Inness, E. L., McIlroy, W. E. Characterizing the determinants of limb preference for compensatory stepping in healthy young adults. Gait & Posture. 33 (2), 200-204 (2011).
- Mansfield, A., et al. Training rapid stepping responses in an individual with stroke. Physical Therapy. 91 (6), 958-969 (2011).
- Mansfield, A., Inness, E. L., Lakhani, B., McIlroy, W. E. Determinants of limb preference for initiating compensatory stepping poststroke. Archives of Physical Medicine and Rehabilitation. 93 (7), 1179-1184 (2012).
- Cheng, K. C., Pratt, J., Maki, B. E. Effects of spatial-memory decay and dual-task interference on perturbation-evoked reach-to-grasp reactions in the absence of online visual feedback. Human Movement Science. 32 (2), 328-342 (2013).
- Dakin, C. J., Bolton, D. A. E. Forecast or Fall: Prediction's Importance to Postural Control. Frontiers in Neurology. 9, 924 (2018).
- Slobounov, S., Cao, C., Jaiswal, N., Newell, K. M. Neural basis of postural instability identified by VTC and EEG. Experimental Brain Research. 199 (1), 1-16 (2009).
- Maki, B. E., McIlroy, W. E. Cognitive demands and cortical control of human balance-recovery reactions. Journal of Neural Transmission. 114 (10), 1279-1296 (2007).
- Bolton, D. A. The role of the cerebral cortex in postural responses to externally induced perturbations. Neuroscience and Biobehavioral Reviews. 57, 142-155 (2015).
- Rossi, S., Hallett, M., Rossini, P. M., Pascual-Leone, A. Safety of TMS Consensus Group Safety, ethical considerations, and application guidelines for the use of transcranial magnetic stimulation in clinical practice and research. Clinical Neurophysiology: official journal of the International Federation of Clinical Neurophysiology. 120 (12), 2008-2039 (2009).
- Bolton, D. A. E., et al. Motor preparation for compensatory reach-to-grasp responses when viewing a wall-mounted safety handle. Cortex. 117, 135-146 (2019).
- Goode, C., Cole, D. M., Bolton, D. A. E. Staying upright by shutting down? Evidence for global suppression of the motor system when recovering balance. Gait & Posture. 70, 260-263 (2019).
- Rydalch, G., Bell, H. B., Ruddy, K. L., Bolton, D. A. E. Stop-signal reaction time correlates with a compensatory balance response. Gait & Posture. 71, 273-278 (2019).
- Gibson, J. J. . The Ecological Approach To Visual Perception. , (1979).
- Majid, D. S. A., Cai, W., George, J. S., Verbruggen, F., Aron, A. R. Transcranial Magnetic Stimulation Reveals Dissociable Mechanisms for Global Versus Selective Corticomotor Suppression Underlying the Stopping of Action. Cerebral Cortex. 22 (2), 363-371 (2012).
- Cohen, R. G., Nutt, J. G., Horak, F. B. Errors in postural preparation lead to increased choice reaction times for step initiation in older adults. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 66 (6), 705-713 (2011).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati