
Method Article
Une technique de lean et de libération modifiée pour mettre l’accent sur l’inhibition de la réponse et la sélection d’action dans l’équilibre réactif
Dans cet article
Résumé
Ici, nous offrons un protocole qui permet à l’utilisateur de modifier sélectivement les offres et / ou des contraintes sur les mouvements qui sont pertinents pour récupérer l’équilibre après la perturbation posturale.
Résumé
L’évaluation de l’équilibre réactif impose traditionnellement un certain type de perturbation à la position verticale ou à la démarche suivie de la mesure du comportement correctif qui en résulte. Ces mesures comprennent des réponses musculaires, des mouvements de membres, des forces de réaction au sol, et même des mesures neurophysiologiques directes telles que l’électroencéphalographie. Grâce à cette approche, les chercheurs et les cliniciens peuvent déduire certains principes de base concernant la façon dont le système nerveux contrôle l’équilibre pour éviter une chute. Une limitation avec la façon dont ces évaluations sont actuellement utilisées est qu’ils mettent fortement l’accent sur les actions réflexives sans qu’il soit nécessaire de réviser les réactions posturales automatiques. Une telle focalisation exclusive sur ces réactions hautement stéréotypées ne permettrait pas d’aborder adéquatement la façon dont nous pouvons modifier ces réactions si le besoin se fait sentir (p. ex., éviter un obstacle à une étape de récupération). Cela semble être une omission flagrante quand on considère l’énorme complexité des environnements auxquels nous sommes confrontés quotidiennement. Dans l’ensemble, le statu quo lors de l’évaluation du contrôle neuronal de l’équilibre ne permet pas d’exposer vraiment comment des ressources cérébrales plus élevées contribuent à prévenir les chutes dans des contextes complexes. Le protocole actuel offre un moyen d’exiger la suppression des réactions d’équilibre corrective automatiques, mais inappropriées, et de forcer une sélection parmi les choix d’action alternatifs pour récupérer avec succès l’équilibre après une perturbation posturale.
Introduction
Malgré la corrélation reconnue entre les chutes et le déclin cognitif1,2,3, un écart majeur persiste dans la compréhension de ce que le cerveau fait réellement pour nous aider à éviter une chute. En théorie, les exigences cognitives seraient accentuées à mesure que la complexité environnementale augmente et dans les situations où nous devons réviser le comportement instinctif. Cependant, la plupart des tests d’équilibre ne parviennent pas à taxer efficacement la fonction cérébrale plus élevée, mettant plutôt l’accent sur les réactions de redressement réflexive. Bien que des facteurs tels que la vitesse de réponse soient essentiels pour prévenir une chute, d’autres facteurs cognitifs, tels que le contrôle inhibiteur et/ou la capacité de choisir des mesures appropriées en fonction d’un contexte donné, peuvent également être importants dans certaines situations. En conséquence, l’une des raisons pour lesquelles nous pouvons ne pas comprendre le rôle du cerveau dans l’équilibre réactif est due à des protocoles de recherche actuellement en cours d’utilisation. Rogers et coll. ont récemment résumé les différentes façons dont le contrôle de l’équilibre a été évalué à l’aide de perturbations externes4. Ces méthodes comprennent la traduction de la plate-forme, les inclinaisons et/ou les gouttes, ainsi que l’utilisation de systèmes automatisés qui poussent, tirent ou suppriment le support postural. Malgré la grande variété de techniques utilisées pour perturber l’équilibre droit, les réactions correctives qui s’ensuivent sont presque toujours effectuées dans un environnement dégagé, minimisant ainsi les contraintes de mouvement. Ici, nous proposons une méthode où des processus cognitifs sont nécessaires pour remplacer l’action prépotente et sélectionner des réponses appropriées entre les alternatives dans une tâche d’équilibre réactif.
Une façon courante de tester l’équilibre réactif est d’imposer des perturbations posturales relativement petites qui peuvent être contrecarrées à l’aide d’un support fixe (généralement pieds en place) réaction5,6,7,8,9. Comparativement, moins d’études se sont concentrées sur les réactions d’équilibre de changement de support en réponse aux perturbations par le biais des tractions de taille, la traduction de plate-forme, et la libération d’un câble de support Par exemple, voir Mansfield et al.10. L’importance de ce dernier groupe peut être appréciée en reconnaissant que lorsque les perturbations sont importantes, les réactions de changement de support sont la seule option pour retrouver la stabilité11. En fait, même pour les perturbations plus petites qui pourraient être gérées à l’aide de stratégies pieds en place (c.-à-d. hanche et/ou cheville), les gens préfèrent souvent marcher lorsqu’on leur donne le choix11. La valeur de l’étude de ces réactions de changement de support réside non seulement dans le fait qu’une plus grande ampleur de perturbation doit être contrecarrée, mais aussi les défis qui émergent lors du repositionnement des membres pour établir une nouvelle base de soutien. La présence d’agréments et/ou de contraintes sur l’action font régulièrement partie de nombreux contextes réels. Cela oblige un processus de sélection à établir une nouvelle base de soutien lorsqu’une perte d’équilibre se produit. Pour adapter le comportement à des environnements complexes, il y a une demande accrue sur des ressources cérébrales plus élevées. Cela est particulièrement vrai lorsque les membres doivent établir une nouvelle base de soutien. Mettre l’accent sur les rôles cognitifs dans l’équilibre réactif, la nécessité de réintroduire l’encombrement et de forcer une stratégie de changement de soutien avec les membres semble logique.
Une façon simple de livrer une perturbation posturale induite par l’extérieur est la technique de maigre et de libération, où un individu est soudainement libéré d’un maigre vers l’avant soutenu. Cette approche permet l’évaluation des réactions compensatoires pour éviter une chute vers l’avant et a été utilisé avec succès dans les populations saines et cliniques12,13,14. Bien que la technique de maigre et de libération soit quelque peu basique, elle offre un aperçu précieux de la capacité d’équilibre réactive (p. ex., la rapidité avec laquelle quelqu’un peut déclencher une étape de récupération ou pour déterminer le nombre d’étapes nécessaires pour retrouver la stabilité). À cette fin, la technique de maigre et de libération fournit un moyen simple d’explorer les rôles cognitifs dans l’équilibre réactif parce que beaucoup des caractéristiques de perturbation sont maintenues constantes. Cela permet un meilleur contrôle expérimental sur les variables spécifiquement pertinentes à la sélection d’action et l’inhibition de réponse. Alors que d’autres modes de perturbation posturale reposent généralement sur l’imprévisibilité en termes de direction de perturbation, d’amplitude et de timing, l’environnement environnant est toujours constant. Même dans les études où des blocs de jambe ont été utilisés pour mettre l’accent sur les réactions de portée à portée de main15 les blocs sont fixés en place sans avoir besoin d’adapter rapidement les comportements de marche en fonction de la présence ou l’absence d’un bloc de jambe. Avec la méthode actuellement proposée, nous pouvons changer l’environnement d’une manière qui exige l’adaptation comportementale pour éviter une chute.
Au-delà des milieux de laboratoire qui exposent insuffisamment les rôles cognitifs dans l’équilibre réactif, un autre problème majeur est une forte dépendance à l’égard de mesures externes telles que l’apparition musculaire, les forces de réaction au sol et la capture de mouvement vidéo pour inférer les processus neuronaux. Bien que ces mesures soient précieuses, le recours exclusif à ces mesures ne permet pas de donner un aperçu direct des mécanismes neuronaux sous-jacents qui contribuent à l’équilibre. Ce problème est aggravé lorsque l’on considère qu’une grande partie de ce que le cerveau peut faire pour prévenir une chute dans des environnements complexes se produit probablement avant l’automne. Les rôles prédictifs dans la prévention des chutes ont récemment été discutés plus largement16. Les orientations de recherche incluent la prévision de l’instabilité future17, la construction de cartes visuospatiales que nous nous déplaçons à travers notre environnement18, et peut-être la formation d’éventualités basées sur l’environnement, même sans la connaissance d’une chute19. Révéler une telle préparation serait tout à fait inaccessible sans l’utilisation de sondes neurophysiologiques directes.
L’approche de maigre et de libération modifiée telle qu’elle est proposée actuellement offre un moyen de surmonter certaines des limitations existantes mentionnées. Ceci est fait en utilisant un scénario d’essai où les membres sont nécessaires pour établir une nouvelle base de soutien dans un environnement exigeant de choix. Cette approche est complétée par des mesures directes de l’activité cérébrale (p. ex., stimulation magnétique transcrânienne, TMS) avant et après la perturbation posturale, ce qui peut compléter les mesures externes de production de force et de captage des mouvements. Cette combinaison de caractéristiques expérimentales représente une innovation importante dans le domaine pour exposer comment le cerveau contribue à l’équilibre dans des contextes complexes où l’inhibition de la réponse et la sélection des actions entre les options sont nécessaires pour prévenir une chute. Ici, nous démontrons une nouvelle méthode pour tester l’équilibre réactif dans un cadre qui met l’accent sur la nécessité pour les processus cognitifs d’adapter le comportement afin d’éviter une chute. La combinaison d’obstacles et d’autorisations d’action force la nécessité d’une inhibition de l’intervention, d’une action ciblée et d’une sélection d’interventions parmi les options. En outre, nous démontrons le contrôle temporel précis sur l’accès visuel, le synchronisation des sondes neurales, le changement de l’environnement de réponse, et le début de la perturbation posturale.
Protocole
Toutes les procédures ont reçu l’approbation de l’Institutional Review Board de l’Université d’État de l’Utah et ont été menées conformément à la Déclaration d’Helsinki.
1. Dépistage des participants
- Demandez aux participants de donner un consentement éclairé écrit aux procédures avant les tests.
- Pour les tests effectués avec TMS, filtrez les participants avant les tests afin d’évaluer leur aptitude à la SMT à l’aide de lignes directrices élaborées par un groupe d’experts20.
2. Acquisition de données : électromyographie (EMG)
- Enregistrez EMG à l’aide d’électrodes de surface et amplifiez les signaux (gain de 1 000 euros; voir Tableau des matériaux).
- Acquérir des données et du filtre bandpass (10 à 1 000 Hz) à l’aide d’une interface d’acquisition de données et d’un logiciel approprié (voir Tableau des matériaux). Utilisez cet appareil et ce logiciel pour contrôler les différents moteurs, la libération du câble et les lunettes d’occlusion décrites plus tard dans les méthodes.
- Abrade doucement la surface de la peau et essuyer avec de l’alcool sur les emplacements musculaires cibles. Fixez les électrodes EMG de surface sur les muscles cibles à l’aide de ruban adhésif à double face, et fixez-les à l’aide de préamorce pour s’assurer que les électrodes restent fixées, en particulier lors de réponses rapides avec les bras et les jambes.
- Recueillir des données EMG à partir de deux muscles intrinsèques de la main sur la main droite (premier interosseus dorsal, IDI et opponens pollicus, OP) et dorsiflexors cheville sur les deux jambes (tibialis antérieur, TA).
REMARQUE : Ces muscles particuliers ont été sélectionnés en fonction de leur pertinence pour une action de portée à portée de main ou un pas en avant, mais d’autres muscles pourraient être sélectionnés au besoin.
3. Matériel d’essai d’équilibre

Figure 1. Installation lean et libération avec des blocs de jambe. Dans cet exemple, un bloc de jambe est placé en position ouverte, tandis que l’autre est réglé pour empêcher une étape. Ces blocs sont déplacés par des moteurs contrôlés par ordinateur (boîtes grises attachées aux poteaux de support). Les couvercles de poignée sont également déplacés pour bloquer ou permettre une réponse de portée à la prise. Ici, les couvercles sont détachés pour permettre une vue complète de la poignée. L’aimant de dégagement est visible sur le mur arrière. Tout le câblage se nourrit à travers la plate-forme en bois elle-même et entre dans la boîte de circuit gris située sur le coin arrière. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}

Figure 2. Installation lean et relâche avec des plaques de force. Cette figure montre comment trois plaques de force peuvent être intégrées en option dans la plate-forme en bois. Si des plaques de force ne sont pas nécessaires, des bouchons en bois peuvent être mis en place. Ces bouchons sont visibles, appuyés sur le mur latéral. Cette image montre également le harnais de sécurité porté par les participants. Ce harnais est fixé au plafond pour servir de mécanisme de sécurité si le participant ne parvient pas à recouvrer son équilibre par lui-même. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
- Système de maigre et de libération modifié
- Utilisez un système de câble sur mesure, maigre et de dégagement pour imposer des perturbations vers l’avant (voir la figure 1 et la figure 2).
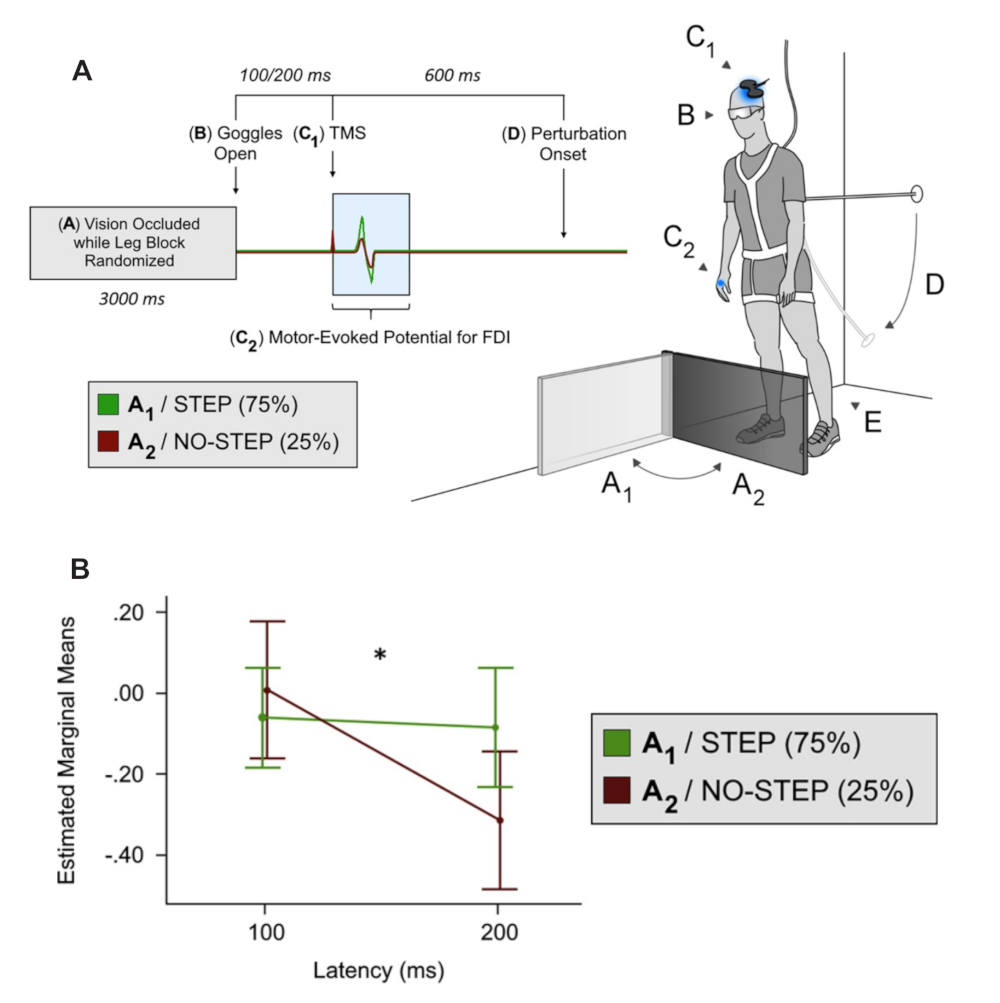
- Demandez aux participants de se tenir en position de vaches maigres vers l’avant, les pieds à peu près la largeur des hanches (voir la figure 3). Maintenez ce maigre vers l’avant à l’aide d’un harnais de carrosserie attaché à un câble, qui est ensuite fixé au mur derrière eux. Attachez le câble à l’arrière du harnais (environ niveau midthoracique). Fixer le câble de soutien au mur par un aimant. L’aimant sera brièvement désactivé pour libérer le câble.
- Rendre les procédures d’essai spécifiques (c.-à-d., lorsque le câble est libéré et le début de la libération du câble) imprévisibles pour le participant. Contrôlez le moment précis de la libération du câble via des commandes informatiques prédéfinies dans une configuration logicielle. Cette configuration permettra de contrôler le moment de la libération du câble afin qu’il puisse être randomisé à travers les essais.
REMARQUE : La configuration logicielle qui contrôle tous les appareils expérimentaux (p. ex., déclencher le moteur pour positionner un bloc de jambe) définit l’état d’essai spécifique (p. ex., si un bloc de jambe est présent ou non). Cela peut être programmé pour randomiser les conditions ou les livrer en blocs pour contrôler le niveau de prévisibilité. - En plus de ce câble de dégagement attaché à l’arrière du harnais, sécurisez également les participants à un câble de soutien suspendu au plafond. Ce câble failsafe ne fournit aucun support de poids corporel sauf si absolument nécessaire. Si un participant n’est pas en mesure de recouvrer l’équilibre par lui-même, le câble l’attrape avant de tomber au sol.
- En raison de l’importance d’informations visuelles fiables, vérifiez que les participants peuvent réellement voir le bloc de poignée et de jambe lorsqu’ils portent les lunettes. Commencez chaque essai en demandant aux participants de regarder directement un point fixe sur le sol, environ 3 m en face d’eux, tout en tenant leur tête dans une position confortable. Placez les participants de façon à ce que leur regard soit placé pour voir la poignée dans le champ visuel périphérique et la partie supérieure de l’obstacle.
- Placez le corps pour s’assurer que la poignée est à portée de main. Demandez au participant de se pencher vers l’avant tout en gardant les deux pieds en contact avec le sol. Cela nécessitera une rotation sur la cheville tandis que le reste du corps reste en ligne droite.
- Déterminez la position maigre spécifique comme angle maigre minimal où un pas vers l’avant est nécessaire pour récupérer l’équilibre lorsque le câble est libéré. Il s’agit d’un processus itératif pour trouver un angle maigre seuil à l’articulation de la cheville, qui est l’angle où le participant n’est plus en mesure d’empêcher une chute vers l’avant en utilisant une réaction pieds en place. Une fois cela établi, vérifiez l’angle maigre tout au long des essais à l’aide de la goniometry.
- Les moyens et les contraintes sur les réponses compensatoires à l’équilibre
- Fixez une poignée de sécurité sur le mur à côté des participants sur leur côté droit. Utilisez une couverture motorisée pour contrôler l’accès à cette poignée. Si la poignée est découverte, lorsque les participants sont libérés de leur soutien vers l’avant maigre, il peut être utilisé pour retrouver l’équilibre.
- Pendant les essais où la poignée est découverte, placez un bloc de jambe devant les jambes du participant. Le bloc de jambe empêche une étape, mais n’est pas rigidement mis en place, ce qui signifie qu’il peut être déplacé lorsqu’il est botté. Programmez le bloc de jambe pour permettre la libre circulation et le construire avec du matériel conforme pour éviter les blessures.
REMARQUE : Les blocs de jambe ont été construits pour forcer une décision d’étape « tout ou rien » étant donné qu’ils s’élèvent presque 30 pouces du sol (niveau milieu de la cuisse sur la plupart des individus). Pour les chercheurs intéressés par un blocus plus nuancé d’une étape de récupération, ces dispositifs pourraient être modifiés pour utiliser un obstacle plus petit/plus court qui permettrait alors une étape adaptée pour les dégager. - Utilisez une bâche noire pour couvrir la poignée et la bloquer de la vue sur certains essais. La poignée restera montée au même endroit, mais sera physiquement couverte pour empêcher l’accès visuel direct et pour empêcher toute prise de soutien. Lorsque cette poignée de support est couverte, retirez le bloc de jambe pour permettre une réaction d’étape si nécessaire.
- Contrôle de la vision
- Limitez la vision au délai juste avant la perturbation posturale et le contrôle par l’intermédiaire de lunettes de cristal liquide (voir Tableau des matériaux). Une fois fermées, les lunettes empêchent l’accès à la scène visuelle afin que les participants ne soient pas au courant de l’état de réponse à venir.
- Modifiez la configuration spécifique du bloc de jambe et gérez la disponibilité pour chaque essai pendant que les lunettes sont fermées de sorte que les participants doivent percevoir rapidement l’environnement une fois les lunettes ouvertes. Déplacez le couvercle de la poignée et le bloc de jambe en position via des moteurs servo déclenchés par ordinateur au début de chaque essai. Demandez aux participants de porter des bouchons d’oreilles et de faire bouger les moteurs en continu pendant la période d’occlusion visuelle afin d’éviter toute repère avancée pour l’état à venir.
4. Conception expérimentale
- Avant de tester, familiariser brièvement les participants sur la façon d’atteindre la poignée et de passer d’une position penchée.
- Fournir aux participants une connaissance complète de l’état de pratique à venir et s’assurer qu’il n’y a pas d’incertitude. Informez les participants qu’une fois les lunettes ouvertes, ils verront la poignée couverte, et le chemin de marche sera clair. Peu de temps après, le câble de soutien se relâchera et ils devront intervenir rapidement pour éviter de tomber en avant.
- Utilisez des instructions similaires pour savoir si la poignée est disponible pour saisir pour éviter une étape.
- Tout au long des essais et de la pratique, demandez aux participants de rester détendus à moins d’être incités à se déplacer par un dégagement soudain du câble.
REMARQUE : En moyenne, les participants ont besoin d’une dizaine de tentatives de pratique avant le début des tests officiels.
- Modifiez aléatoirement le paramètre de réponse entre les essais. S’ils sont libérés du câble de soutien, les participants doivent retrouver la stabilité en atteignant la poignée de sécurité murale ou en s’avançant si le chemin d’étape est dégagé.
- Fermez toujours les lunettes d’occlusion au début de chaque essai, date à laquelle le réglage de réponse sera modifié. Fermez les lunettes pendant une période randomisée (généralement d’environ 3 à 4 s) pour permettre au réglage de changer.
- Lorsque les lunettes s’ouvrent, fournir l’un des deux paramètres de réponse possibles: (1) le bloc de jambe est présent et la poignée de soutien est présente, ou (2) aucun bloc de jambe n’est présent et aucune poignée de soutien n’est présente.
REMARQUE : Dans la première condition, une poignée de support est disponible à une distance d’accès confortable et le bloc de jambe empêche une étape. Ce paramètre impose un contexte où la seule option disponible est de saisir rapidement la poignée de support disponible avec leur bras droit. La deuxième condition permet une étape de récupération tout en empêchant l’utilisation de la poignée de soutien. - Lors des essais où une perturbation se produit, relâchez le câble peu de temps après l’ouverture des lunettes. Cette période de retard variera selon les exigences de l’étude, mais varie de 200 à 1 000 ms.
- Pour certains procès, ne relâchez pas pour agir comme un procès de capture. Cela permet d’éviter les réponses anticipées basées uniquement sur la vision.
- Faites durer chaque essai de 10 s, avec une courte pause entre les essais pour permettre aux participants de se réinitialiser au besoin. Donnez aux participants une brève période de repos entre chaque bloc d’essai et laissez-les s’asseoir. La conception expérimentale de base est représentée dans la figure 3 (en bas).
REMARQUE : Le nombre total d’essais est varié en fonction des besoins de chaque étude, mais il a tendance à inclure environ 100 essais répartis sur trois à quatre blocs d’essai.

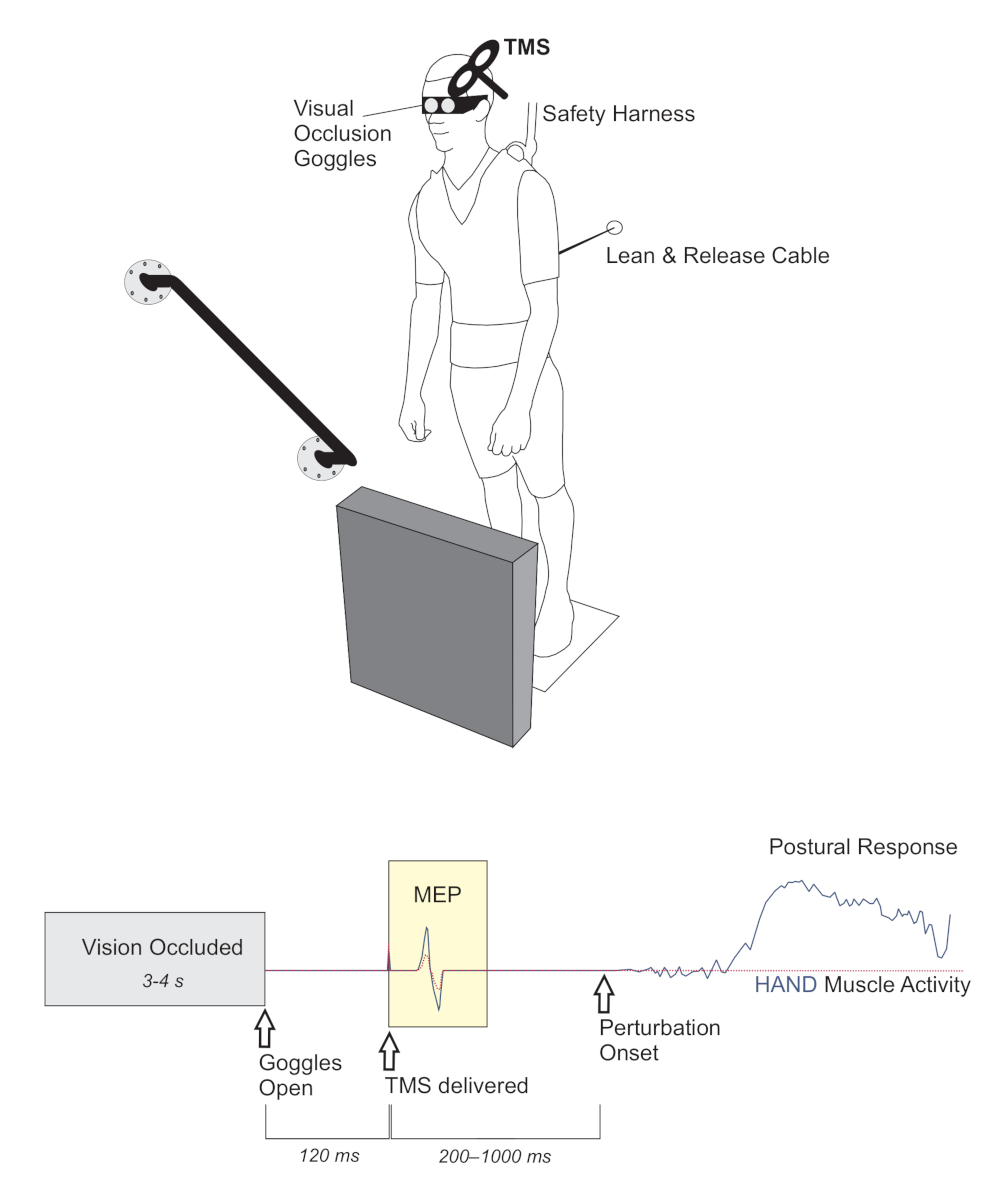
Figure 3. Méthode basée sur TMS pour étudier l’impact de la perception des avantages environnementaux et / ou des contraintes sur la préparation du moteur. EN HAUT. Un appareil maigre et de libération a libéré les participants d’une manière imprévisible (blocs d’essai de perturbation seulement). L’ampleur de la perturbation a nécessité une réaction rapide de changement de support, en utilisant le bras ou la jambe pour rétablir une base stable de soutien en atteignant à une main sécurisée, ou en faisant un pas en avant. Entre les essais, la vision a été occluse à l’aide de lunettes d’occlusion de cristal liquide et les objets au premier plan ont été réarrangés au hasard. EN BAS. La chronologie montre quand l’accès visuel à l’environnement est devenu disponible et le moment des sondes TMS par rapport à la fois à l’accès visuel et à la perturbation. L’amplitude maximale à pic de la réponse musculaire à TMS (c.-à-d. le potentiel évoqué par le moteur, MEP) a fourni un indice d’excitabilité corticospinal dans la période précédant la perturbation. Ce chiffre présente des données de réponse théoriques pour démontrer l’impact hypothétique d’une offre d’action à la main (solide, ligne bleue) par rapport à un essai où la poignée est couverte (pointillée, ligne rouge). Dans ce chiffre, les deux essais/conditions sont superposés pour illustrer l’effet hypothétique de la préparation de la production automobile pour faciliter ou supprimer une action potentielle basée sur un contexte environnemental particulier. Adapté de la figure 1 à Bolton et al.21. Notez que TMS a été utilisé pour sonder l’excitabilité corticospinal dans cet exemple. Toutefois, cela n’a pour but que de fournir une représentation de base de la séquence des événements à l’aide de ce maigre modifié et la libération. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
5. Protocole TMS (facultatif)
- Fournir une seule impulsion TMS sur la représentation corticale moteur main tandis que les participants sont soutenus dans un maigre vers l’avant. Fournir des impulsions TMS peu de temps après l’ouverture des lunettes, mais avant tout mouvement pour étudier comment la visualisation de l’environnement affecte l’ensemble moteur. Voir la figure 3 pour visualiser la séquence des événements au cours d’un essai, y compris lorsque TMS est livré.
- Définissez le moment de la livraison de TMS en fonction de la question de recherche. Dans les résultats représentatifs, la stimulation variait entre 100 ms et 200 ms post-vision. En plus des paramètres de réponse énumérés ci-dessus, entremêlez aléatoirement les essais de référence « sans vision » tout au long des essais pour livrer TMS sans ouvrir les lunettes. Le but de cette condition est de fournir une base de référence pour tout changement lié à la tâche dans l’activité motrice (p. ex., augmentation de l’excitation).
REMARQUE : D’autres détails sur les procédures TMS spécifiques peuvent être trouvés dans Bolton et al.21 et Goode et al.22. - Fournir des stimuli magnétiques au cortex moteur primaire (M1) avec la bobine stimulante orientée vers environ 45 degrés au plan sagittal (voir Tableau des matériaux). Appliquer des stimuli à la position optimale pour obtenir un potentiel d’intervention moteur (MEP) dans le muscle de l’IED sur la main droite (c.-à-d. le moteur 'hotspot').
- Une fois que le « point chaud » est trouvé, déterminez l’intensité du stimulus d’essai. Aux fins de la recherche actuelle, il s’agit de l’intensité de stimulation où le PEOA moyen est d’environ 1 à 1,5 mV de pointe à pic. Fixez la bobine TMS à cet endroit et réinitialisez la position de bobine si le mouvement de la tête se produit (p. ex., après la libération du câble). Déterminez l’intensité de stimulus d’essai tandis que les sujets se tiennent vers l’avant se penchent pour tenir compte de n’importe quelle influence posturale d’état sur l’excitabilité corticospinal.
Résultats
Toutes les études exemplaires présentées ont été menées auprès de jeunes femmes et hommes âgés de 18 à 30 ans. La taille totale de l’échantillon pour chaque étude était la suivante : l’exemple 1 (Rydalch et coll.23) comprenait 12 participants, l’exemple 2 (Bolton et al.21) comprenait 63 participants, et l’exemple 3 (Goode et al.22) comprenait 19 participants. Le lecteur doit se référer aux études complètes pour plus de détails sur les méthodes et les analyses.
Exemple 1
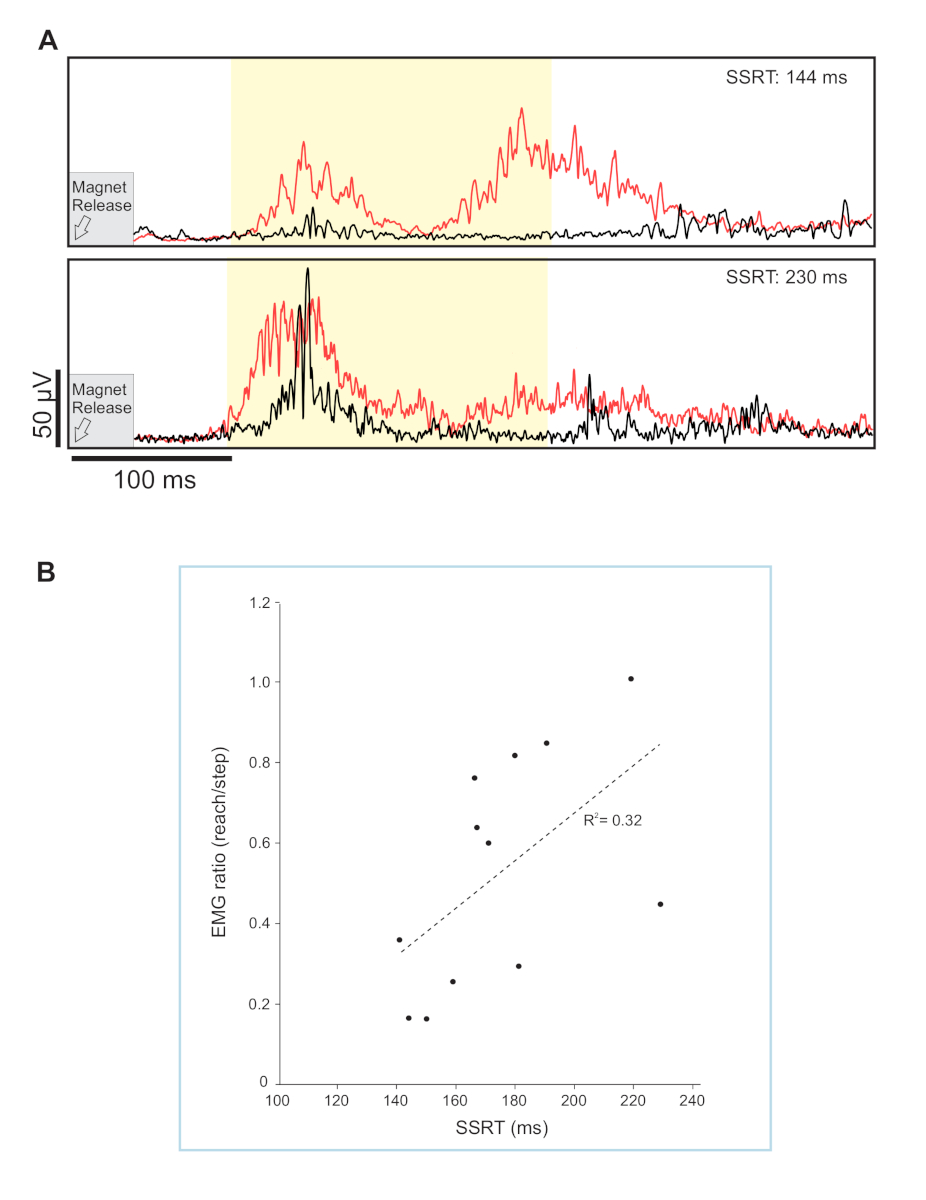
Le blocage d’une étape de récupération rapide, en particulier lorsque le pas a été rendu automatique par la répétition fréquente, a permis l’évaluation de l’inhibition de réponse dans un contexte postural. Ici, nous avons comparé la réponse musculaire de la jambe quand un pas en avant a été autorisé ou obstrué23. La réponse musculaire de la jambe de marche a été comparée entre les essais où le participant devrait atteindre par rapport aux essais où ils devraient marcher. Ceci a été accompli en comparant l’ampleur de réponse des dorsiflexors de cheville (tibialis antérieur) pendant les essais de portée-à-poignée contre étape. Plus précisément, l’EMG intégré sur une fenêtre de 200 ms (c.-à-d. 100 ms à 300 ms post-perturbation) a été utilisé pour calculer un rapport de réponse musculaire. Une valeur plus faible indiquait une plus grande capacité de s’abstenir de marcher comme décrit en détail dans Rydalch et coll.23. En utilisant l’ampleur de la réponse musculaire, notre intention était de fournir une jauge sensible pour une tendance à répondre avec la jambe. Dans cet exemple, l’objectif de notre étude était de déterminer si l’inhibition de réponse mesurée avec un test cognitif assis (c.-à-d. la tâche de signal d’arrêt, SST) était corrélée avec la performance sur une tâche réactive d’équilibre où la suppression d’une étape de rétablissement d’équilibre était exigée. Dans la tâche d’équilibre, un total de 256 essais ont été collectés, dont 30% ont utilisé un bloc de jambe. Dans la figure 4A, nous mettons en évidence les formes d’onde moyennes des individus qui étaient aux extrémités opposées du continuum pour supprimer l’activité des jambes liées à l’étape. Le scatterplot de la figure 4B représente une corrélation faible, mais significative, entre la capacité de supprimer une étape bloquée et l’inhibition de réponse mesurée par le temps de réaction stop-signal.
Lors de l’interprétation de ces résultats, il est important de reconnaître que le TSS (décrit à l’Annexe), et en effet la plupart des tests cognitifs, s’appuient sur des réponses simplistes (souvent des mouvements de doigts) faites par les participants assis en réponse à des indices impératifs affichés sur un écran d’ordinateur. Cette étude de Rydalch et coll. portait sur la possibilité d’arrêter une réponse prépotente qui était préservée dans un test d’inhibition de la réponse assis standard par rapport à un critère d’équilibre réactif où les étapes compensatoires doivent être parfois supprimées23. Les résultats ont montré une corrélation entre les résultats du test cognitif (temps de réaction du signal d’arrêt) et le pas compensatoire, ce qui suggère que la capacité d’arrêt d’une personne se généralise à travers diverses tâches.

Figure 4. Réponse moyenne de jambe d’étape. (A) Des formes d’onde moyennes sont indiquées pour l’antérieur tibialis dans la jambe de marche. Les essais d’étapes sont montrés en rouge et atteignent les essais en noir. Données de réponse musculaire exmplares montrées pour deux participants avec un temps de réaction rapide (en haut) ou à un arrêt lent (en bas). Ce temps de réaction de signal d’arrêt offre une milliseconde mesure de la capacité d’arrêt. La réponse musculaire précoce (EMG intégrée) a été mesurée de 100 à 300 ms (région ombragée jaune clair). (B) Scatterplot montrant la corrélation entre le rapport de réponse musculaire et le temps de réaction stop-signal (SSRT) au retard visuel de 400 ms, r - 0,561; p 0,029. Adapté des figures 3 et 5, Rydalch et al.23. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
Exemple 2
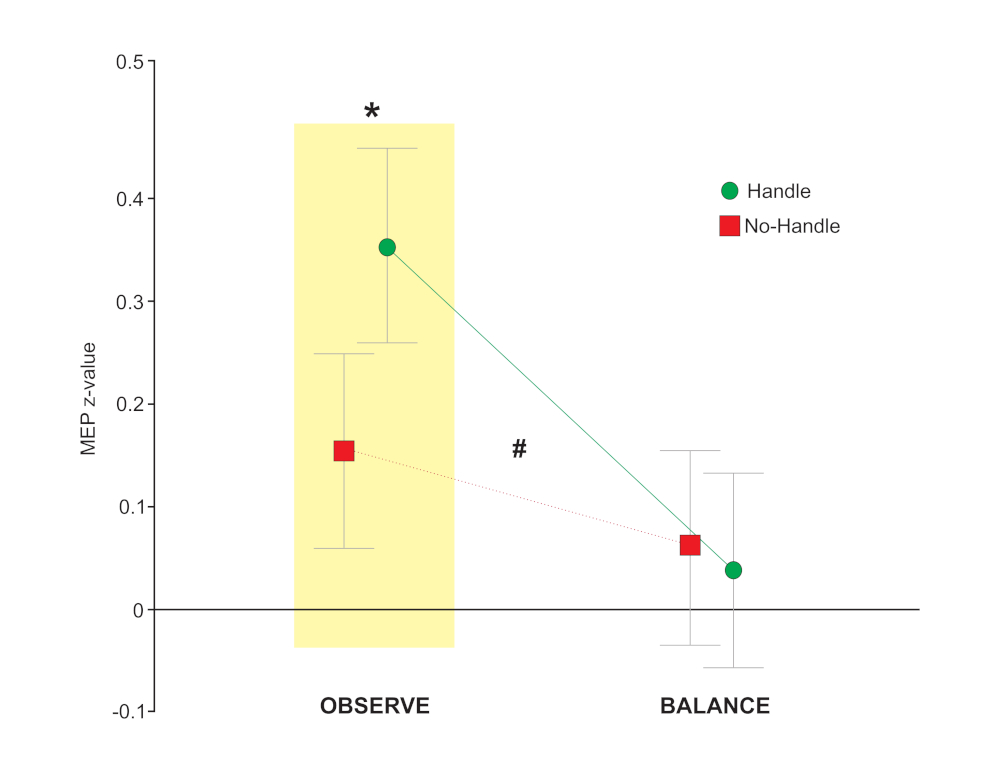
Cette étude illustre comment notre configuration de maigre et de libération modifiée lorsqu’elle est combinée avec TMS peut être utilisée pour étudier la préparation du moteur basée sur la vision. Le concept d’acompentances (initialement proposé par Gibson24) a été testé dans un contexte postural permanent, afin de déterminer si l’excitabilité corticospinale d’un muscle de la main (utilisé pour la prise) a été facilitée lors de l’affichage d’une poignée de soutien. La clé de cette approche était d’évaluer comment l’état excitatif du système moteur était affecté par la seule vision. Plus précisément, les impulsions TMS ont été livrées peu de temps après l’ouverture des lunettes, mais avant tout signal de mouvement (c.-à-d. la libération du câble). De cette manière, seule l’activité motrice liée à la scène visuelle a été analysée tandis que la réponse comportementale à la perturbation était secondaire. Contrairement à l’étude ci-dessus, qui a mis l’accent sur la nécessité d’inhibition de la réponse en présentant la réponse étape plus fréquemment, cette étude a utilisé une probabilité égale de poignée (portée) vs no-handle (étape) pour se concentrer sur l’amorçage visuel de l’action de la main. Les résultats ont indiqué que la visualisation de la poignée a entraîné la facilitation d’une main intrinsèque (c.-à-d., la prise) musculaire, mais seulement dans l’état d’observation pure (figure 5)21. REMARQUE : Pour les données exemplaires, l’acquisition et le code logiciel d’analyse, ainsi que les notes d’orientation, veuillez consulter le cadre scientifique ouvert (https://osf.io/9z3nw/). Les exemples 1 et 3 ont utilisé des codes et des procédures similaires, avec des modifications à des états spécifiques.

Figure 5. Données montrant la différence d’excitabilité corticospinal pour les essais REACH (c.-à-d., poignée) par rapport aux essais STEP (c.-à-d. sans poignée) dans un muscle intrinsèque de la main pendant que les participants se tenaient dans un maigre soutenu. Cela a montré une plus grande activité dans la main lorsque la poignée était présente et les participants ont simplement vu la poignée (OBS), mais cet effet était absent lors d’un équilibre séparé (BAL) blocs d’essais où le câble a été périodiquement libéré. Les barres d’erreur montrent l’erreur standard de la moyenne. Les mesures répétées bidirectionnelles ANOVA ont révélé une interaction entre l’état et l’offre, F1, 62 - 5,69, #p - 0,020. Pour répondre à nos hypothèses spécifiques, nous avons utilisé des comparaisons planifiées antérieures pour déterminer si l’amplitude des eurodéputés dans l’IED était plus grande lorsque la poignée était présente dans chaque état séparément. Pour l’hypothèse 1, des comparaisons prévues ont été utilisées pour comparer les niveaux d’acompétence (STEP, REACH) dans l’état d’OBS et ont indiqué une augmentation significative de l’amplitude lorsque la poignée était visible, t121 - 2,62,p - 0,010. Pour l’hypothèse 2, nous avions initialement prédit une interaction, mais dans la direction opposée de ce qui a été trouvé. La comparaison prévue de l’offre dans l’état de BAL n’a montré aucune différence significative liée à la présence d’une poignée, t121 - -0.46, p - 0.644. Adapté de la figure 5, Bolton et coll.21. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
Exemple 3
Cet exemple final met l’accent sur la façon dont nous avons adapté ce dispositif pour étudier une fois de plus la préparation motrice d’un muscle de la main basé sur la vision, mais axé sur la nécessité de supprimer rapidement l’action des jambes. Dans cette version, le couvercle du manche était couvert en permanence, tandis que seul le bloc de jambe déplacé. Comme l’exemple 1, la probabilité d’arrêt par rapport aux conditions d’étape a été manipulée pour encourager une étape automatique. Étant donné que la poignée n’était plus une option dans cette étude, le degré de maigre avant mesuré à la cheville a été légèrement réduit (6 degrés contre 10 euros comme dans les deux études ci-dessus) pour permettre une réaction de soutien fixe. L’utilisation spécifique pour cette version de la tâche était d’étudier le concept de suppression globale, qui a déjà été exploré dans les tâches assises où les presses bouton focales ont été utilisés en réponse aux stimuli visuels présentés sur un écran d’ordinateur25. Comme l’exemple 2, TMS a été livré pour évaluer l’excitabilité corticospinal dans un muscle intrinsèque de main immédiatement après l’accès à l’environnement de réponse (c.-à-bloc ou aucun bloc), mais avant n’importe quel signal de se déplacer (c.-à-d., la libération de câble). La raison d’être pour tester un muscle intrinsèque de la main dans une tâche qui n’a utilisé que des réponses aux jambes était de voir si une tâche musculaire non pertinente montrerait la preuve d’une suppression générale dans tout le système moteur. Les résultats présentés ci-dessous dans la figure 6 montrent la preuve d’un arrêt généralisé dans tout le système moteur lorsqu’une étape automatique est brusquement arrêtée22.

Figure 6. Tâche de lean et de libération modifiée avec bloc de jambe seulement (c.-à-d. pas d’option pour saisir une poignée de support). (A) Cette figure représente la suppression de l’amplitude de l’eurodéputé dans un muscle intrinsèque de main quand un bloc de jambe a été présenté (c.-à-d., état de NO-STEP). (B) Des mesures répétées ANOVA, l’interaction de latence de l’état d’étape x, F1,18 - 4,47, p - 0,049, était significative. L’inspection visuelle du graphique de ligne 2 révèle l’amplitude décroissante de l’eurodéputé au fil du temps pour l’état NO-STEP seulement et ceci a été confirmé avec des comparaisons de suivi. Plus précisément, ces comparaisons ont révélé une diminution significative à 200 ms par rapport à 100 ms t18 - 2.595,p - 0.009 pour la condition DE NO-STEP. En revanche, une comparaison similaire entre 200 ms et 100 ms pour l’état STEP ne révèle aucune différence t18 -0.346, p - 0.367. Adapté des figures 1 et 2, Goode et coll.22. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
Discussion
Ce système de maigre et de libération modifié offre une nouvelle façon d’évaluer les rôles cognitifs dans l’équilibre réactif. Comme pour la procédure de maigre et de libération standard, la direction et l’amplitude des perturbations posturales sont prévisibles pour le sujet tandis que le moment de la libération du câble est imprévisible. Ce qui est unique dans l’approche actuelle, c’est que l’accès à la vision est contrôlé avec précision alors que le sujet reste fixe et que l’environnement de réponse est modifié autour d’eux pour créer différentes opportunités d’action et/ou contraintes. En manipulant la présence d’obstacles et d’avantages, cette méthode met l’accent sur les processus cognitifs tels que la prise de décision (c.-à-d. la sélection de l’action) et l’inhibition de la réponse par rapport à la récupération de l’équilibre.
La méthode proposée a le potentiel de fournir un aperçu unique dans le contrôle neuronal de l’équilibre, mais pose certaines limitations. Par exemple, lors de l’utilisation de la méthode de maigre et de libération, la libération du câble est initiée à partir d’un maigre avant, ce qui nécessite une étape de récupération d’équilibre prononcée par rapport à d’autres méthodes de perturbation posturale externe10. En outre, la direction et l’ampleur de la perturbation sont prévisibles, ce qui peut conduire à l’activation anticipée des muscles qui ne seraient normalement pas engagés dans des scénarios d’automne plus réalistes. Enfin, la vision est temporairement occluse avant la sortie du câble, qui s’écarte également de l’expérience quotidienne d’une personne. Ces caractéristiques rendent notre évaluation de l’équilibre quelque peu artificielle et peuvent empêcher la généralisation entre les différents modes de perturbation. Il est important de reconnaître que la généralisation des chutes dans le monde réel est toujours une préoccupation lorsqu’on tire des inférences sur la façon dont l’équilibre est contrôlé à partir d’une méthode d’évaluation particulière. En effet, il n’existe pas actuellement de critère complet reconnu pour la capacité d’équilibre4. À l’heure actuelle, une chute en avant permet de maintenir constamment les caractéristiques de perturbation et les paramètres de réponse tout en manipulant des exigences cognitives spécifiques qui sont souvent négligées ou inaccessibles dans les évaluations traditionnelles de l’équilibre. Un tel contrôle expérimental est bénéfique, mais doit être pris en considération lors de l’interprétation des résultats.
En tant que deuxième limitation, la construction de l’équipement d’essai et les compétences techniques requises peuvent représenter un défi à mettre en œuvre cette méthode. Trois étudiants en génie électrique de l’Université d’État de l’Utah ont construit la plate-forme, mis en place l’électronique, et programmé des microcontrôleurs pour conduire des servo-moteurs pour le couvercle de poignée et le bloc de jambe. Les coûts de construction étaient modestes (c.-à-d. 15 000 $ sans compter les plaques de force montées dans la plate-forme). Néanmoins, cela peut poser un défi en fonction des ressources disponibles.
Des aperçus spécifiques du contrôle neuronal de l’équilibre ont été obtenus à l’aide de cette approche. Ces exemples indiquent que la stimulation cérébrale non invasive peut être utilisée pour capturer l’ensemble de moteur basé sur des objets d’observation dans un contexte postural et offrent une technique pour évaluer l’inhibition de réponse utilisant des réponses musculaires. Notamment, la technique de maigre et de libération modifiée pourrait être facilement adaptée pour incorporer d’autres sondes neurophysiologiques telles que l’électroencéphalographie et la spectroscopie proche infrarouge fonctionnelle. Même sans l’inclusion de mesures neuronales directes, les conceptions d’étude qui se concentrent entièrement sur les forces externes, l’activation musculaire, et la cinématique peuvent fournir un aperçu important dans les marqueurs comportementaux des déficits cognitifs. Par exemple, Cohen et coll.26ont démontré une application intéressante pour l’utilisation de plaques de force pour capturer des changements posturaux anticipés au cours d’une tâche de passation de pouvoir réactive. Dans leur étude, les déficits dans l’inhibition de réponse chez les personnes âgées ont été révélés par le déplacement inapproprié du poids, qui à son tour a mené à des retards dans les temps d’étape de choix-réaction. Une telle approche pourrait être appliquée au paradigme actuel pour prendre des mesures sensibles de changement de poids et d’erreurs de pas.
Cette nouvelle méthode s’appuie sur un test d’équilibre réactif établi où les participants sont libérés d’un maigre pris en charge, et comprend maintenant des scénarios qui exigent une flexibilité comportementale. Les conceptions de test adaptées à l’exposition de l’inhibition de réponse et de la sélection d’action nous permettent d’appliquer des concepts de la psychologie cognitive au domaine du contrôle de l’équilibre. Une telle approche est nécessaire pour s’appuyer sur la reconnaissance que le déclin cognitif et la prévalence des chutes sont corrélés, et pour acquérir une compréhension mécaniste de la façon dont les ressources cognitives préviennent les chutes. Vraisemblablement cette configuration pourrait être utilisée non seulement comme un outil de recherche, mais aussi comme un moyen de formation des rôles cognitifs en équilibre. Un objectif important du travail continu de notre laboratoire est de comprendre comment le cerveau utilise des informations contextuelles pour mettre à jour quel mouvement serait le plus approprié pour prévenir une chute étant donné l’environnement. Des indices tels que la disponibilité d’une main stable ou d’une barrière d’étape potentielle peuvent guider la réponse à apporter en cas de besoin et peut façonner secrètement les processus prédictifs du cerveau16. Notamment, la capacité d’utiliser ces informations de façon appropriée peut se détériorer avec l’âge si des facultés mentales telles que le contrôle des interférences inhibitrices ou la mémoire visuelle-spatiale sont nécessaires. Étant donné la relation entre le déclin cognitif et les chutes1-3, la mise en œuvre de conceptions d’études qui mettent l’accent sur la nécessité d’intégrer la pertinence contextuelle pourrait fournir un aperçu précieux des déficits d’équilibre dans de nombreuses populations vulnérables.
Déclarations de divulgation
Les auteurs n’ont rien à divulguer.
Remerciements
La recherche rapportée dans cette publication a été soutenue par le National Institute on Aging of the National Institutes of Health sous le numéro de prix R21AG061688. Le contenu est uniquement la responsabilité des auteurs et ne représente pas nécessairement les vues officielles des National Institutes of Health.
matériels
| Name | Company | Catalog Number | Comments |
| CED Power1401 | Cambridge Electronic Design | Data acquisition interface | |
| Delsys Bagnoli-4 amplifier | Delsys | EMG equipment | |
| Figure-eight D702 Coil | Magstim Company Ltd | TMS coil | |
| Kistler Force Plates | Kistler Instrument Corp. | Multicomponent Force Plate Type 9260AA | Force plates |
| Magstim 200 stimulator | Magstim Company Ltd | TMS stimulation units | |
| PLATO occlusion spectacles | Translucent Technologies Inc | visual occlusion | |
| Signal software | Cambridge Electronic Design | Version 7 |
Références
- Mirelman, A., et al. Executive function and falls in older adults: new findings from a five-year prospective study link fall risk to cognition. PloS one. 7 (6), 40297 (2012).
- Herman, T., Mirelman, A., Giladi, N., Schweiger, A., Hausdorff, J. M. Executive control deficits as a prodrome to falls in healthy older adults: a prospective study linking thinking, walking, and falling. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 65 (10), 1086-1092 (2010).
- Saverino, A., Waller, D., Rantell, K., Parry, R., Moriarty, A., Playford, E. D. The Role of Cognitive Factors in Predicting Balance and Fall Risk in a Neuro-Rehabilitation Setting. PLOS ONE. 11 (4), 0153469 (2016).
- Rogers, M. W., Mille, M. -. L. Chapter 5 - Balance perturbations. Handbook of Clinical Neurology. 159, 85-105 (2018).
- Adkin, A. L., Campbell, A. D., Chua, R., Carpenter, M. G. The influence of postural threat on the cortical response to unpredictable and predictable postural perturbations. Neuroscience Letters. 435 (2), 120-125 (2008).
- Marlin, A., Mochizuki, G., Staines, W. R., McIlroy, W. E. Localizing evoked cortical activity associated with balance reactions: does the anterior cingulate play a role. Journal of Neurophysiology. 111 (12), 2634-2643 (2014).
- Horak, F. B., Nashner, L. M. Central programming of postural movements: adaptation to altered support-surface configurations. Journal of Neurophysiology. 55 (6), 1369-1381 (1986).
- Nashner, L. M. Fixed patterns of rapid postural responses among leg muscles during stance. Experimental Brain Research. 30 (1), 13-24 (1977).
- Varghese, J. P., Marlin, A., Beyer, K. B., Staines, W. R., Mochizuki, G., McIlroy, W. E. Frequency characteristics of cortical activity associated with perturbations to upright stability. Neuroscience Letters. 578, 33-38 (2014).
- Mansfield, A., Maki, B. E. Are age-related impairments in change-in-support balance reactions dependent on the method of balance perturbation. Journal of Biomechanics. 42 (8), 1023-1031 (2009).
- Maki, B. E., McIlroy, W. E. The role of limb movements in maintaining upright stance: the "change-in-support" strategy. Physical Therapy. 77 (5), 488-507 (1997).
- Lakhani, B., Mansfield, A., Inness, E. L., McIlroy, W. E. Characterizing the determinants of limb preference for compensatory stepping in healthy young adults. Gait & Posture. 33 (2), 200-204 (2011).
- Mansfield, A., et al. Training rapid stepping responses in an individual with stroke. Physical Therapy. 91 (6), 958-969 (2011).
- Mansfield, A., Inness, E. L., Lakhani, B., McIlroy, W. E. Determinants of limb preference for initiating compensatory stepping poststroke. Archives of Physical Medicine and Rehabilitation. 93 (7), 1179-1184 (2012).
- Cheng, K. C., Pratt, J., Maki, B. E. Effects of spatial-memory decay and dual-task interference on perturbation-evoked reach-to-grasp reactions in the absence of online visual feedback. Human Movement Science. 32 (2), 328-342 (2013).
- Dakin, C. J., Bolton, D. A. E. Forecast or Fall: Prediction's Importance to Postural Control. Frontiers in Neurology. 9, 924 (2018).
- Slobounov, S., Cao, C., Jaiswal, N., Newell, K. M. Neural basis of postural instability identified by VTC and EEG. Experimental Brain Research. 199 (1), 1-16 (2009).
- Maki, B. E., McIlroy, W. E. Cognitive demands and cortical control of human balance-recovery reactions. Journal of Neural Transmission. 114 (10), 1279-1296 (2007).
- Bolton, D. A. The role of the cerebral cortex in postural responses to externally induced perturbations. Neuroscience and Biobehavioral Reviews. 57, 142-155 (2015).
- Rossi, S., Hallett, M., Rossini, P. M., Pascual-Leone, A. Safety of TMS Consensus Group Safety, ethical considerations, and application guidelines for the use of transcranial magnetic stimulation in clinical practice and research. Clinical Neurophysiology: official journal of the International Federation of Clinical Neurophysiology. 120 (12), 2008-2039 (2009).
- Bolton, D. A. E., et al. Motor preparation for compensatory reach-to-grasp responses when viewing a wall-mounted safety handle. Cortex. 117, 135-146 (2019).
- Goode, C., Cole, D. M., Bolton, D. A. E. Staying upright by shutting down? Evidence for global suppression of the motor system when recovering balance. Gait & Posture. 70, 260-263 (2019).
- Rydalch, G., Bell, H. B., Ruddy, K. L., Bolton, D. A. E. Stop-signal reaction time correlates with a compensatory balance response. Gait & Posture. 71, 273-278 (2019).
- Gibson, J. J. . The Ecological Approach To Visual Perception. , (1979).
- Majid, D. S. A., Cai, W., George, J. S., Verbruggen, F., Aron, A. R. Transcranial Magnetic Stimulation Reveals Dissociable Mechanisms for Global Versus Selective Corticomotor Suppression Underlying the Stopping of Action. Cerebral Cortex. 22 (2), 363-371 (2012).
- Cohen, R. G., Nutt, J. G., Horak, F. B. Errors in postural preparation lead to increased choice reaction times for step initiation in older adults. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 66 (6), 705-713 (2011).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.