
Method Article
反応バランスにおける反応抑制と行動選択を強調する変更されたリーンおよびリリース技術
要約
ここでは、姿勢摂動後のバランス回復に関連する動きに対するアフォーダンスや制約をユーザーが選択的に変更できるようにするプロトコルを提供します。
要約
反応バランスの評価は、伝統的に直立姿勢または歩行に何らかの摂動を課し、その後に結果的な矯正行動を測定する。これらの措置には、筋肉応答、四肢の動き、地上反応力、さらには脳波などの直接的な神経生理学的手段が含まれる。このアプローチを使用して,研究者および臨床医は,神経系が転倒を避けるためにどのようにバランスをコントロールするかについて,いくつかの基本的な原則を推測することができる。これらの評価が現在使用されている方法の1つの制限は、自動姿勢反応を修正する必要なしに反射的な行動を重視していることです。このような非常にステレオタイプな反応に対する排他的な焦点は、必要に応じてこれらの反応を変更する方法(例えば、回復ステップで障害を避ける)に十分に対処することができません。これは、私たちが日々直面する環境の巨大な複雑さを考えると、明らかな省略であるように見えます。全体として、バランスの神経制御を評価する際の現状は、より高い脳資源が複雑な設定での転倒を防ぐことにどのように寄与しているかを真に明かすことができない。本プロトコルは、自動で不適切な修正バランス反応の抑制を要求し、後方摂動後のバランスを正常に回復するために、代替アクション選択肢の中から選択を強制する方法を提供します。
概要
転倒と認知機能の低下の間の認識された相関関係にもかかわらず 1,,2,3,脳が実際に私たちが落ちるのを避けるために何をするのかを理解する上で大きなギャップが残っています。理論的には、環境の複雑さが増し、本能的な行動を修正する必要がある状況では、認知的要求が強調されます。しかし、ほとんどのバランステストは、より高い脳機能に効果的に課税できず、代わりに反射的な権利反応を強調する。応答速度などの要因は、落下を防ぐために不可欠であるが、阻害制御や特定の状況に基づいて適切なアクションを選択する能力などの追加の認知要因も特定の状況で重要である可能性があります。その結果、反応バランスにおける脳の役割を理解できない理由の1つは、現在使用されている研究プロトコルによるものです。Rogersら は最近、外部摂動4を使用してバランス制御を評価するさまざまな方法を要約した。これらの方法には、プラットフォームの翻訳、傾きやドロップ、および、姿勢サポートをプッシュ、プル、または削除する自動化システムの使用が含まれます。直立平衡を乱すために使用される多種多様な技術にもかかわらず、続く矯正反応は、ほとんど常に妨げられない環境で行われ、動きの制約を最小限に抑えます。ここでは、認知プロセスが、有効な作用を上書きし、反応バランスタスクで代替者の間で適切な応答を選択する必要がある方法を提案する。
反応バランスをテストする一般的な方法は、固定サポート(通常はフィート,インプレース)反応5、6、7、8、96,を使用して対抗できる比較的小さな5姿勢摂動を課8,す方法です。7ウエストプルによる摂動、プラットフォーム翻訳、およびサポートケーブルからのリリースを伴うサポートバランスの変化反応に焦点を当てた研究は比較的少ない例として、Mansfieldら10を参照してください。後者のグループの重要性は摂動が大きい場合、支持の変化反応が安定性11を回復する唯一の選択肢であることを認識することによって理解することができる。実際には、フィートインプレース(すなわち、股関節および/または足首)戦略を使用して管理することができる小さな摂動のためにも、人々はしばしば選択11を与えられたときにステップすることを好む。このような支持の変化反応を研究する価値は、摂動の大きさが高く対抗されなければならないという事実だけでなく、新しい支持基盤を確立するために手足を再配置する際に現れる課題でもあります。行動に対するアフォーダンスや制約の存在は、多くの現実世界の設定の一部です。これにより、バランスの損失が発生したときに、選択プロセスによって新しい支持基盤が確立されます。複雑な環境に行動を適応させるために、より高い脳資源に対する需要が高まっています。これは、手足が新しい支持基盤を確立しなければならない場合に特に当てはまります。反応バランスで認知的役割を強調し、暴露するために、乱雑さを再導入し、手足とのサポートの変更戦略を強制する必要性は論理的に思えます。
外部から誘発された姿勢摂動を提供する簡単な方法の1つは、個人がサポートされているフォワードリーンから突然解放されるリーン&リリース技術です。このアプローチは、前方の落下を避けるために補償反応の評価を可能にし、正常に健康な集団と臨床集団12、13、1413,14で使用されています。12リーン&リリース技術はやや基本的ですが、反応性バランス能力(回復ステップをどれだけ早く開始できるか、または安定性を取り戻すために必要なステップ数を決定する)に関する貴重な洞察を提供します。現在の目的のために、リーン&リリース技術は、摂動特性の多くが一定に保持されているので、反応バランスの認知的役割を探求するための簡単な方法を提供します。これにより、アクション選択と応答抑制に特に関連する変数に対する実験的制御が大きくなります。他の姿勢摂動モードは、通常、摂動方向、振幅、およびタイミングの観点から予測不能に依存しますが、周囲の環境は常に一定です。脚ブロックがリーチツー把握反応を強調するために使用されている研究でさえ、ブロックは脚ブロックの有無に基づいてステップ動作を迅速に適応させる必要がなく、所定の位置に固定されています。現在提案されている方法では、落下を避けるために行動適応を要求する方法で環境を変えることができます。
反応バランスで認知的役割を不十分に暴露する実験室の設定を超えて、もう一つの大きな問題は、筋肉のオンセット、地上反応力、ビデオモーションキャプチャなどの外部対策に大きく依存して神経プロセスを推測することです。これらの措置は貴重ですが、そのような措置への排他的な依存は、バランスに寄与する基礎となる神経メカニズムに対する直接的な洞察を提供することができません。この問題は、脳が落下前に起こる可能性が高い複雑な環境での落下を防ぐために何をすることができるかを考えるときに複雑化しています.秋の予防における予測的役割は、最近、より広範囲に議論されています16.研究の方向性としては、将来の不安定性17の予測、環境18を移動する際のvisuospatialマップの構築、秋19の予知なしに環境に基づく不測の時合いが生じ得る。このような製剤を明らかにすることは、直接神経生理学的プローブを使用せずに完全にアクセスできないであろう。
現在提案されているように変更されたリーン&リリースアプローチは、言及された既存の制限のいくつかを克服するための手段を提供しています。これは、肢が選択要求の厳しい環境で新しいサポート基盤を確立するために必要なテスト シナリオを使用して行われます。このアプローチは、脳活動の直接的な尺度(例えば、経頭蓋磁気刺激、TMS)の前後の前後の力の生産および動きの捕獲の外的な尺度を補足することができるによって増強される。この実験的特徴の組み合わせは、脳が落下を防ぐために応答阻害と選択肢の中でアクションを選択することが求めされる複雑な設定でバランスにどのように寄与するかを明示する分野の重要な革新を表しています。ここでは、転倒を避けるために認知プロセスが行動を適応させる必要性を強調する設定で反応バランスをテストするための新しい方法を示す。アクションのための障害物とアフォーダンスの組み合わせは、応答抑制、ターゲットアクション、およびオプション間の応答選択の必要性を強制します。さらに、視覚アクセス、神経プローブのタイミング、応答環境の変化、姿勢摂動の開始に対する正確な時間的制御を実証する。
プロトコル
すべての手続きはユタ州立大学の機関審査委員会から承認を受け、ヘルシンキ宣言に従って行われました。
1. 参加者の審査
- テストの前に、参加者に手続きに対する書面によるインフォームド・コンセントを提供してもらいます。
- TMS を使用したテストでは、専門家グループ20によって開発されたガイドラインを使用して TMS に対する適合性を評価するために、テストの前にスクリーン参加者が
2. データ取得:電図(EMG)
- EMGを表面電極を使用して記録し、信号を増幅します(ゲイン = 1,000;材料表を参照)。
- データ収集インターフェースと適切なソフトウェアを使用して、データおよびバンドパスフィルタ(10~1,000 Hz)を取得します(資料表を参照)。このデバイスとソフトウェアを使用して、方法の後半で説明するように、各種モータ、ケーブルリリース、オクルージョンゴーグルを制御します。
- 皮膚表面を優しくブラドし、ターゲットの筋肉の位置にアルコールで拭きます。両面テープを使用してターゲット筋肉にEMG電極を表面に固定し、特に腕と脚との迅速な応答中に電極が固定されたままであることを確認するために、プリラップを使用してさらに安全にします。
- 右手の2つの固有の手筋(最初の背部インターソセウス、FDIおよびオポネーンのポリカス、OP)および両足の足首背反射体(脛眼前部、TA)からEMGデータを収集する。
注:これらの特定の筋肉は、リーチ・ツー・ラニクションまたはフォワードステップとの関連性に基づいて選択されましたが、必要に応じて他の筋肉を選択することができます。
3. バランス試験装置

図 1.足ブロックを備えたリーン&リリース設定。この例では、片方の脚ブロックが開いた位置に設定され、もう一方の脚ブロックはステップを防ぐために設定されています。これらのブロックはコンピュータ制御のモーター(サポートポストに取り付けられた灰色の箱)によって動かされる。ハンドルカバーは、ブロックに移動するか、または把握に到達する応答を可能にします。ここでは、カバーがハンドルの完全なビューを許可するために切り離されています。剥離磁石は後壁に見える。すべての配線は木製のプラットフォーム自体を通して供給し、バックコーナーにある灰色の回路ボックスに入ります。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図 2.リーン&フォースプレートでセットアップをリリースします。この図は、3つのフォースプレートをオプションで木製のプラットフォームに埋め込むことができる方法を示しています。力の版が要求されない場合は、所定の位置に木製のプラグを置くことができる。これらのプラグは、側面壁に寄りかかって、目に見える。この画像は、参加者が着用する安全ハーネスも示しています。このハーネスは、参加者が自分でバランスを回復できなかった場合に安全メカニズムとして機能するために天井に固定されています。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- 変更されたリーンおよびリリースシステム
- カスタムメイドのリーン&リリースケーブルシステムを使用して、前方摂動を課します(図1および図2を参照)。
- 参加者は、足のヒップ幅をほぼ離れて前方のリーン位置に立たせている(図3参照)。ケーブルに取り付けられたボディハーネスを使用して、この前方リーンを維持し、その後、その後の壁に固定します。ケーブルをハーネスの背面(ほぼ中間部レベル)に接続します。支線を磁石で壁に固定します。磁石はケーブルを解放するために一時的に非アクティブ化されます。
- 特定の試用手順(ケーブルが解放され、ケーブルリリースが始まったとき)を参加者に予測しないでください。ソフトウェア構成にプリセットされたコンピュータコマンドを介してケーブルリリースの正確なタイミングを制御します。この設定により、ケーブルリリースのタイミングを制御できるため、試行間でランダム化することができます。
注: すべての実験デバイスを制御するソフトウェア構成(例えば、脚ブロックを配置するモーターをトリガする)は、特定の試行条件(例えば、脚ブロックが存在する場合)を設定します。これは、条件をランダム化するか、ブロックで提供して予測可能性のレベルを制御するようにプログラムできます。 - ハーネスの背面に取り付けられたこのリリースケーブルに加えて、天井から吊り下げられたサポートケーブルに参加者を固定します。このフェイルセーフケーブルは、絶対に必要でない限り、体重をサポートしません。参加者が自分でバランスを取り戻すことができない場合、ケーブルは地面に落ちる前にそれらをキャッチします。
- 信頼性の高い視覚情報の重要性のために、参加者が実際にゴーグルを着用するときにハンドルと脚のブロックを見ることができることを確認してください。各試験を開始し、参加者は快適な位置に頭を保持しながら、床の上の固定点、約3mの前を直接見るように指示します。周辺視野と障害物の上部にハンドルを表示するように、参加者を配置します。
- ハンドルが把握可能な範囲内になるように本体を配置します。両足を床に接触させながら、参加者に身を乗り出してもらいます。これは、体の残りの部分が直線に残っている間、足首の周りの回転を必要とします。
- ケーブルが解放されたときにバランスを回復するために前進ステップが必要な最小のリーン角度として、特定のリーン位置を決定します。これは足首関節のしきい値の無駄のない角度を見つけるための反復的なプロセスであり、これは参加者がフィートインプレース反応を使用して前方落下を防ぐことができなくなった角度です。これが確立されたら、ゴニオメトリーを使用してテスト全体を通して無駄のない角度を確認します。
- 補償残高の対応に対するアフォーダンスと制約
- 右側の参加者の横にある壁に安全ハンドルを固定します。このハンドルへのアクセスを制御するには、電動カバーを使用します。ハンドルが発見された場合、参加者がサポートされている前方リーンから解放されると、バランスを取り戻すために使用できます。
- ハンドルが発見された試験の間、参加者の足の前に脚ブロックを置きます。脚ブロックはステップを妨げるが、所定の位置に固定されていないので、蹴ったときに変位する可能性があります。自由な動きを可能にし、損傷を避けるために準拠材料とそれを構築するように脚ブロックをプログラムします。
注:脚ブロックは、地面からほぼ30インチ(ほとんどの個人では太もものレベルの中間)に上昇することを考えると、「オールオア・ノー」ステップの決定を強制するために構築されています。回復ステップのより微妙な封鎖に興味を持つ研究者のために、これらのデバイスは、それらをクリアするための適応ステップを可能にする小さい/短い障害物を使用するように変更することができます。 - 黒いタープを使用してハンドルを覆い、特定のトライアルで視界からブロックします。ハンドルは同じ場所に取り付けられたままですが、物理的に覆われ、直接の視覚的アクセスを防ぎ、支持的な把握を防ぎます。このサポートハンドルがカバーされている場合は、必要に応じてステップの反応を可能にするために脚ブロックを取り外します。
- ビジョンの制御
- 液晶ゴーグルを介して姿勢摂動と制御の直前の時間枠にビジョンを制限します(材料表を参照)。閉じると、ゴーグルはビジュアルシーンへのアクセスを妨げるので、参加者は今後の応答条件に気づいていません。
- ゴーグルが閉じている間に脚ブロックの特定の構成を変更し、各トライアルの可用性を処理して、参加者がゴーグルが開いたら環境を素早く認識する必要があります。各試験の開始時に、コンピュータトリガのサーボモーターを介して、ハンドルカバーと脚ブロックを位置に移動します。参加者に耳栓を着用させ、視覚的な閉塞の期間中にモーターを継続的に動かして、今後の状態に対する高度な手がかりを避けます。
4. 実験計画
- テストの前に、参加者にハンドルに到達する方法を簡単に理解し、傾いた位置から前進してください。
- 今後の練習状況を完全に把握し、不確実性がないことを確認します。ゴーグルが開いたらハンドルが覆われて、ステップパスがはっきりすることを参加者に指示します。その直後に、サポートケーブルがリリースされ、彼らは前方に落ちないように迅速にステップする必要があります。
- ステップを回避するためにハンドルを把握できるかどうかに関して同様の指示を使用します。
- テストと練習を通して、突然のケーブルの解放によって動くように促されない限り、参加者はリラックスしたままにするように指示します。
注: 参加者は、正式なテストを開始する前に、平均して約 10 回の実習を行う必要があります。
- 試行間の応答設定をランダムに変更します。サポートケーブルから解放された場合、参加者は壁に取り付けられた安全ハンドルに手を伸ばすか、ステップパスが明確であれば前進することによって安定性を取り戻す必要があります。
- 各試行の開始時に必ずオクルージョンゴーグルを閉じ、その時点で応答設定が変更されます。設定を変更できるように、ランダム化された期間(通常は約 3 ~ 4 s)のゴーグルを閉じます。
- ゴーグルが開いているときに、(1)脚ブロックが存在し、サポートハンドルが存在するか、(2)脚ブロックが存在しない、サポートハンドルが存在しない、2つの可能な応答設定のいずれかを提供します。
注:最初の条件では、サポートハンドルは快適な到達距離で利用可能であり、脚ブロックはステップを防ぎます。この設定は、使用可能な唯一のオプションは、使用可能なサポート ハンドルを右腕で素早く把握する場合に適用されます。2 番目の条件では、サポート・ハンドルの使用を妨げながら、リカバリー・ステップを実行できます。 - 摂動が起こる試験では、ゴーグルが開いた直後にケーブルを放します。この遅延期間は学習要件によって異なりますが、200 ~ 1,000 ミリ秒の範囲です。
- 一部の試験では、キャッチトライアルとして機能するようにリリースしないでください。これは、ビジョンのみに基づく予想応答を避けるのに役立ちます。
- 各トライアルを最後の10 sにし、トライアルの間に短い休止を行い、参加者が必要に応じてリセットできるようにします。各テストブロックの間に参加者に短い休息期間を与え、座ることができるようにします。基本的な実験計画は図3(下)に示されています。
注: 試験回数の合計は、各試験のニーズに合わせて変化しますが、3~4個のテストブロックに分けて約100回の試験が含まれる傾向があります。

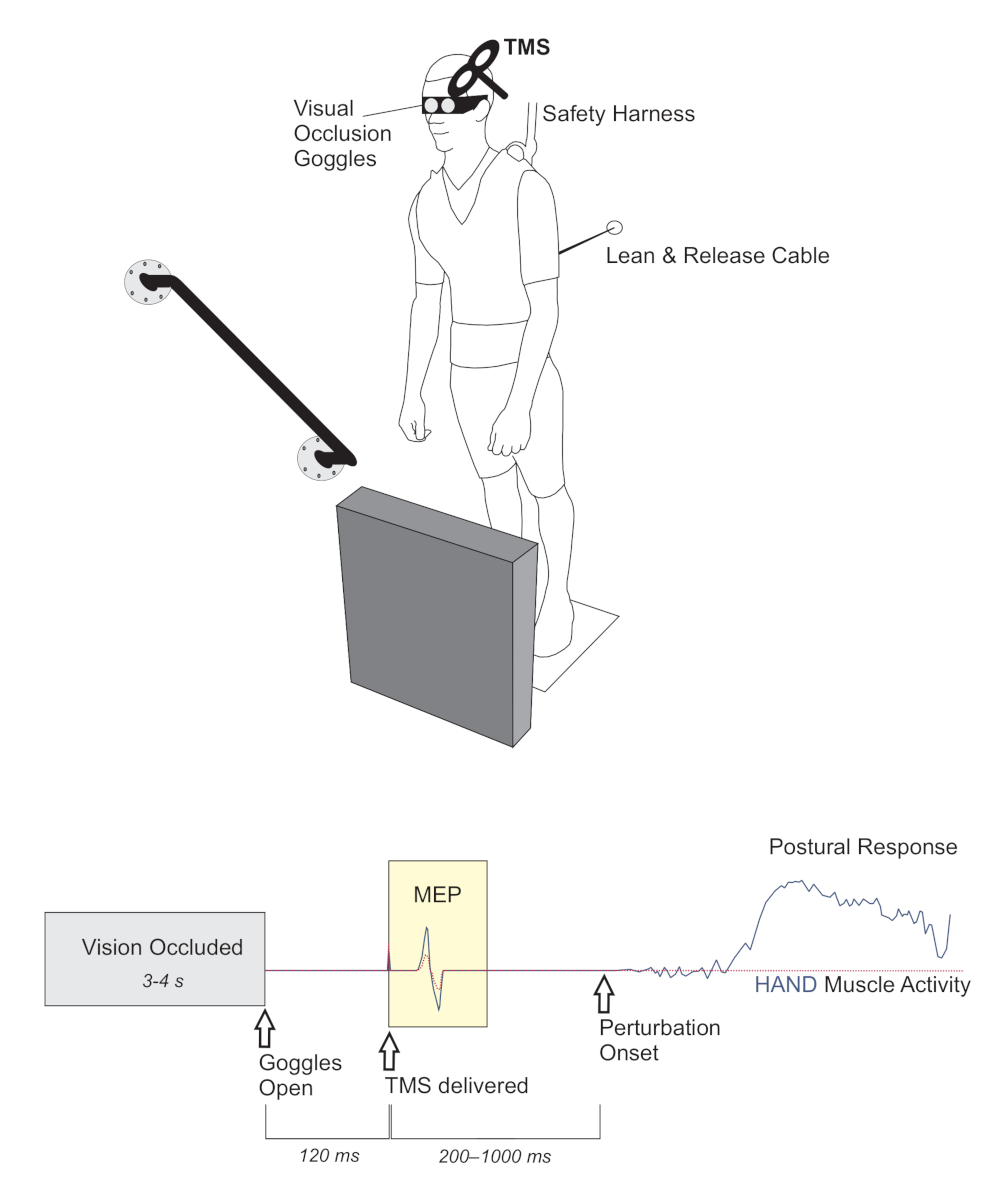
図 3.TMSベースの手法は、モータの準備に対する環境アフォーダンスや制約の認識の影響を調査する。トップ。リーン&リリース装置は、予測不可能な方法で参加者を解放しました(摂動テストブロックのみ)。摂動の大きさは、腕または脚のいずれかを使用して、安全なハンドホールドに到達するか、前進することによって、サポートの安定した基盤を再確立するために、迅速な支持の変更反応を必要としました。試験の合間に、液晶閉塞眼鏡を使用して視力を閉塞させ、前景の物体を無作為に再配置した。下。タイムラインは、環境へのビジュアルアクセスが利用可能になった時期と、視覚的アクセスと摂動の両方に関連するTMSプローブのタイミングを示しています。TMSに対する筋肉応答のピークからピークへの振幅(すなわち、運動誘発電位、MEP)は摂動前の期間におけるコルチコ脊髄興奮性の指標を提供した。この図は、手の行動(実線、青線)とハンドルが覆われている試行(点線、赤い線)のアフォーダンスの仮説的な影響を示す理論的な応答データを示しています。この図では、両方の試験/条件が、特定の環境コンテキストに基づいて潜在的な作用を促進または抑制するためにモーター出力を準備することの仮説的な効果を示すために重ね合わせられています。ボルトンらの図1から適応した.なお、この例では、TMSを用い、コルチコ脊髄興奮性を調査した。ただし、これは、この変更されたリーン & リリースを使用して、イベントのシーケンスの基本的な表現を提供することを目的としています。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
5. TMS プロトコル(オプション)
- 参加者が前方リーンでサポートされている間、手の運動皮質表現の上に単一パルスTMSを提供する。ゴーグルを開いた直後にTMSパルスを送り、動きの前に、環境を見ることはモーターセットにどのような影響を与えるのかを調査します。TMS が配信されるタイミングを含め、トライアル中のイベントのシーケンスを視覚化するには、図 3を参照してください。
- 研究の質問に従ってTMS配信のタイミングを設定します。代表的な結果では、刺激は100 msと200 msポストビジョンの間で変化した。上記の応答設定に加えて、テスト中に「ビジョンなし」のリファレンス試験がランダムに散在し、ゴーグルを開かずにTMSを提供します。この条件の目的は、運動活動におけるタスク関連の変化(例えば、覚醒の増加)のベースラインを提供することにある。
注:特定のTMS手順の詳細については、ボルトンら21とGoodeら22を参照してください。 - 磁気刺激を一次運動皮質(M1)に、約45°の方向の刺激コイルを矢状平面に送り出します(材料表を参照)。最適な位置で刺激を適用して、右手のFDI筋肉に運動誘発電位(MEP)を得る(すなわち、モーターの「ホットスポット」)。
- 「ホットスポット」が見つかると、テスト刺激強度が決定される決定します。現在の研究目的では、平均MEPが約1〜1.5mVのピークからピークまでの刺激強度です。この位置にTMSコイルを固定し、ヘッドモーションが発生した場合(例えば、ケーブルリリース後)コイルの位置をリセットします。被験者が前方に傾いている間にテスト刺激強度を決定し、コルチコ脊髄興奮性に対する姿勢状態の影響を説明する。
結果
提示されたすべての模範的な研究は,18歳から30歳までの若い女性と男性とともに行われました。各試験のサンプルサイズの合計は以下の通りであった:実施例1(Rydalchら23)には12人の参加者が含まれ、例2(Boltonら21)には63人の参加者が含まれ、実施例3(Goode etal. 22)には19人の参加者が含まれていた。この読者は、方法と分析の詳細については、完全な研究を参照する必要があります。
例 1
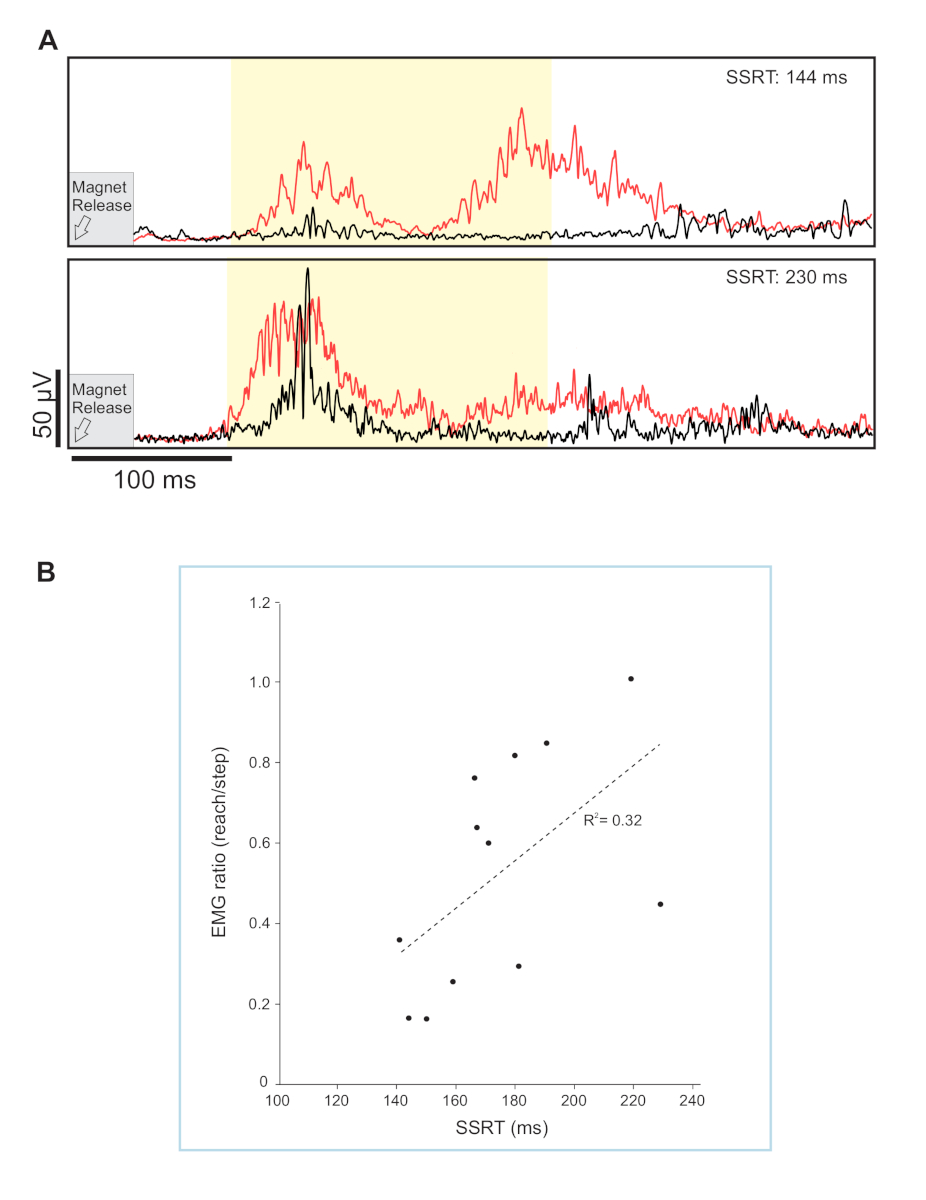
迅速な回復ステップを遮断し、特に頻繁に繰り返しでステッピングを自動で行った場合、姿勢コンテキストにおける応答阻害の評価を可能にする。ここでは、前進ステップが許可または妨害されたときの脚筋応答を比較した23.足の足からの筋肉の応答は、参加者が到達すべき試験と、ステップする必要のある試験の間で比較されました。これは、手の届く操作とステップの試験の間に足首のドシレクサ(脛理前)の応答の大きさを比較することによって達成された。具体的には、200msのウィンドウ(すなわち、100ms〜300msの摂動後)にわたって統合されたEMGを使用して、筋肉応答比を計算した。小さい値は、Rydalchら23に詳細に記載されているように、踏み出しを控える能力が大きいことを示した。筋肉の応答の大きさを使用して、私たちの意図は、脚で応答する傾向のための敏感なゲージを提供することであった。この例では、我々の研究の目的は、座った認知テスト(すなわち、停止信号タスク、SST)で測定された応答阻害が、バランス回復ステップの抑制が必要な反応バランスタスクのパフォーマンスと相関しているかどうかを判断することであった。バランスタスクでは、合計256の試験が収集され、そのうち30%が脚ブロックを使用しました。図4Aでは、ステップ関連の脚の活動を抑制するために連続体の反対側にあった個体の平均波形を強調した。図4Bの散布図は、ストップシグナル反応時間で測定したブロックステップを抑制する能力と応答阻害との間に小さいが有意な相関関係を示している。
これらの結果を解釈する際には、SST (付録に記載されている)と実際にほとんどの認知テストが、コンピュータ画面に表示される命令的な手掛かりに応じて着席した参加者によって行われた単純な応答(しばしば指の動き)に依存していることを認識することが重要です。Rydalchらのこの研究は、代償ステップを時折抑制しなければならない反応バランス試験と比較して、応答阻害の標準的な着席試験にわたって、能率的応答を停止する能力が保持された場合に対処した。結果は、認知テストの結果(停止信号反応時間)と補償ステッピングとの間の相関関係を示し、これは個人の停止能力が多様なタスクにわたって一般化することを示唆している。

図 4.平均ステップレッグ応答: (A) 足脚の脛石症前の平均波形が表示される。ステップ試験は赤で示され、黒で試験に達する。速い(上)または遅い停止(下)シグナル反応時間のいずれかを有する2人の参加者について示される例示筋応答データ。この停止信号反応時間は、停止能力のミリ秒単位を提供します。初期の筋肉応答(統合EMG)は100〜300 ms(薄黄色のシェーディング領域)から測定された。(B) 400 ms の視覚遅延での筋肉応答比とストップシグナル反応時間(SSRT)の相関を示す散布図 r = 0.561;p = 0.029.図3と図5から適応, Rydalchら23. .この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
例 2
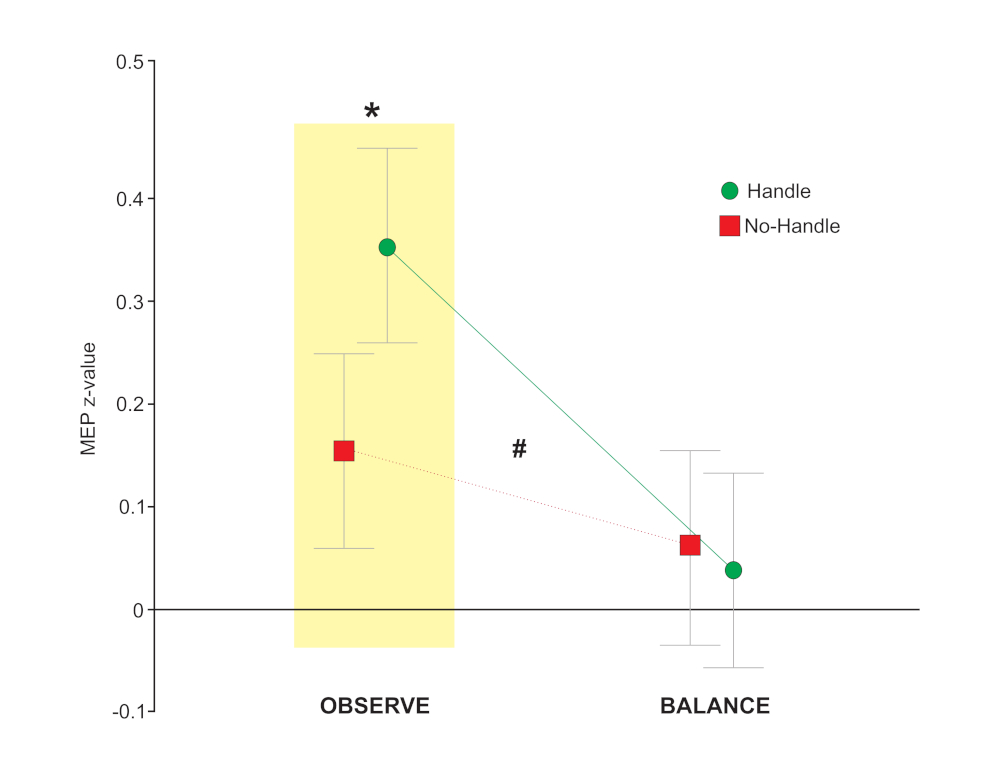
この研究は、TMSと組み合わせたときに、私たちの変更されたリーン&リリースセットアップがビジョンに基づいて運動準備を研究するためにどのように使用できるかを例示しています。アフォーダンスの概念(もともとギブソン24によって提案された)は、支持的なハンドルを見たときに手の筋肉のコルチコ脊髄興奮性(把握に使用される)が容易であったかどうかを判断するために、立っている姿勢の文脈でテストされた。このアプローチの鍵は、運動システムの興奮状態が視力だけでどのように影響を受けたかを評価することであった。具体的には、TMSパルスはゴーグルが開いた直後に送達されたが、動き(すなわち、ケーブル解放)のための任意の手がかりに先立って。この方法では、視覚シーンに関連する運動活動のみを分析し、摂動に対する行動応答は二次的であった。ステップ応答をより頻繁に提示することによって応答阻害の必要性を強調した上記の研究とは異なり、この研究は、手の行動の視覚的プライミングに焦点を当てるためにハンドル(リーチ)対ノーハンドル(ステップ)の同等の確率を使用しました。結果は、ハンドルを見ることは、本質的な手の促進(すなわち、つかむ)筋肉の結果をもたらしたが、純粋な観察状態(図5)21でだけ21であることを示した。注: 例示的なデータ、取得、および解析ソフトウェア コードについては、ガイダンス ノートと共に、オープン サイエンス フレームワーク (https://osf.io/9z3nw/) を参照してください。例 1 と 3 では、類似したコードとプロシージャを使用し、特定の状態を変更しました。

図 5.参加者が支えられた無駄のない中に立っている間に、REACH(すなわち、ハンドル)とSTEP(すなわち、ハンドルなし)試験に対するコルチコ脊髄興奮性の差を示すデータ。これは、ハンドルが存在し、参加者が単にハンドル(OBS)を見たときに手の中でより大きな活動を示したが、この効果は、ケーブルが定期的に解放された別のバランス(BAL)試験ブロックの間に存在しなかった。誤差範囲は平均の標準誤差を示します。双方向反復測定ANOVAは、条件とアフォーダンスの間の相互作用を明らかにしました, F1, 62 = 5.69, #p = 0.020.具体的な仮説に対処するために、各条件内にハンドルが別々に存在する場合にFDIのMEP振幅が大きかったかどうかを判断するために、事前に計画された比較を使用しました。仮説1では、OBS条件内のアフォーダンスレベル(STEP、REACH)を比較するために計画比較を使用し、ハンドルが見えるときに振幅が有意に増加したことを明らかにした、t121 = 2.62、*p = 0.010。仮説2では、当初は相互作用を予測していましたが、見つかったものとは反対の方向に予測していました。BAL条件内でのアフォーダンスの計画比較では、ハンドルの存在に関連する有意な差は示さなかった、 t121 = -0.46, p = 0.644.図5から適応し、ボルトンら21.この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
例 3
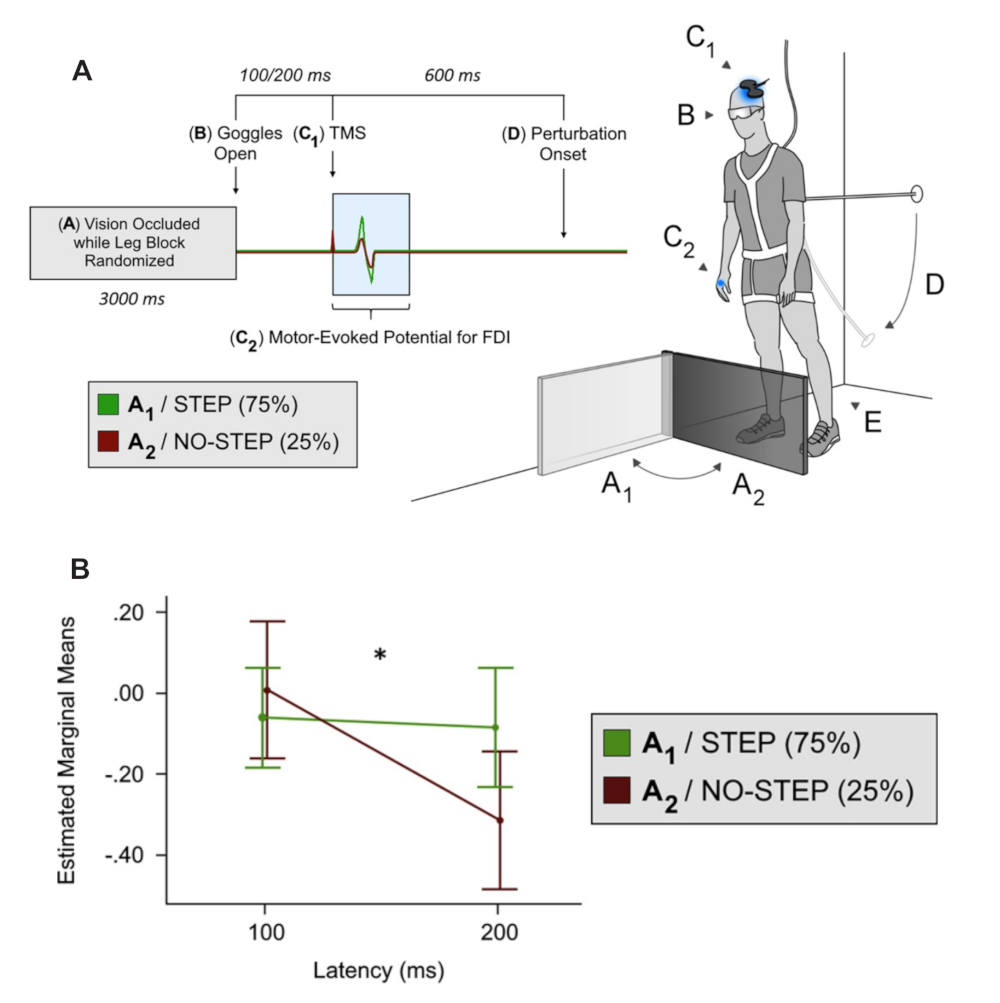
この最後の例は、このデバイスを再び視力に基づいて手筋の運動準備を研究するために適応させたが、脚の作用を迅速に抑制する必要性に焦点を当てた方法を強調する。このバージョンでは、ハンドルカバーは永久に覆われ、脚ブロックだけが移動しました。例1と同様に、停止とステップ条件の確率は、自動ステップを奨励するために操作されました。この研究ではハンドルがもはや選択肢ではなくなったことを考えると、足首で測定されたフォワードリーンの度合いは、固定支持反応を可能にするためにわずかに減少した(〜6°対~10°)。このバージョンのタスクの具体的な用途は、コンピュータディスプレイ25に提示された視覚刺激に応答して焦点ボタン押しが使用された着席タスクで以前に探求されたグローバル抑制の概念を調査することであった。例2と同様に、TMSは応答環境へのアクセス直後の固有の手筋(すなわち、ブロックまたはブロックなし)におけるコルチコ脊髄興奮性を評価するために送達されたが、移動する手がかり(すなわち、ケーブルリリース)の前に行われた。脚の応答のみを使用したタスクで本質的な手の筋肉をテストするための根拠は、タスク無関係な筋肉が運動システム全体で一般的な抑制の証拠を示すかどうかを確認することでした。図6に示す結果は、自動ステップが突然停止した場合のモータシステム全体にわたる広範囲にわたるシャットダウンの証拠を示しています。

図 6.脚ブロックのみで変更されたリーン&リリースタスク(サポートハンドルを把握するためのオプションなし)。(A) この図は、脚ブロックが提示されたときの固有の手筋におけるMEP振幅抑制(すなわち、NO-STEP状態)を示す。(B)反復測定ANOVAから、ステップ条件x待ち時間相互作用、F1,18 = 4.47、p = 0.049、有意であった。 p線グラフ2の目視検査は、NO-STEP条件に対してのみ時間の経過とともにMEP振幅が減少したことを明らかにし、これはフォローアップ比較で確認された。具体的には、これらの比較は、NO-STEP条件の100 ms t18 = 2.595、*p = 0.009と比較して200 msで有意な減少を明らかにした。対照的に、STEP 条件の 200 ミリ秒と 100 ミリ秒の類似比較では、t18 = 0.346、p = 0.367 の差は示されません。 p図1と2から適応し、グッドら22.この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
ディスカッション
この変更されたリーン&リリースシステムは、反応バランスにおける認知的役割を評価する新しい方法を提供します。標準のリーン&リリース手順と同様に、姿勢摂動の方向と振幅は、ケーブルリリースのタイミングが予測不可能である一方で、被検体に予測可能です。現在のアプローチでユニークなのは、視覚へのアクセスは正確に制御され、被験者は固定されたままであり、応答環境は周囲に変更され、異なるアクションの機会や制約を生み出すということです。障害とアフォーダンスの存在を操作することにより、この方法は、バランス回復に関連して意思決定(すなわち、行動選択)および応答阻害などの認知プロセスを強調する。
提案された方法は、バランスの神経制御にユニークな一見を提供する可能性を持っていますが、特定の制限を提起します。例えば、リーン&リリース方式を使用する場合、ケーブル放出は、前方リーンから開始され、外部姿勢摂動10の他の方法と比較して顕著なバランス回復ステップを必要とする。また、摂動の方向と大きさは予測可能であり、通常はより現実的な落下シナリオに従事しない筋肉の予想活性化につながる可能性があります。最後に、ビジョンはケーブルリリースの前に一時的に閉塞され、個人の日々の経験からも逸脱します。これらの機能は、バランスの評価をやや人工的に行い、異なる摂動モード間の一般化を妨げる可能性があります。現実世界に対する一般化の容易性は、特定の評価方法からバランスがどのように制御されるかについて推論を引き出す際に常に懸念されることを認識することが重要です。実際、バランス能力に関する一般的に認められた包括的なテストは、現在4存在しない。現在の目的のために、セットフォワードフォールは摂動特性と応答設定を一定に保持し、従来のバランス評価では無視されたりアクセスできない特定の認知要求を操作することができます。このような実験的制御は有益であるが、結果を解釈する際に考慮すべきである。
第2の制限として、試験装置の構築と必要な工学技能は、この方法を実装するための課題を表している可能性がある。ユタ州立大学の3人の電気工学の学生は、プラットフォームを構築し、エレクトロニクスを設定し、ハンドルカバーと脚ブロック用のサーボモーターを駆動するようにマイクロコントローラをプログラムしました。建設費は控えめでした(つまり、プラットフォームに取り付けられたフォースプレートを含まない<$15,000)。ただし、これは、利用可能なリソースによっては、問題を引き起こす可能性があります。
このアプローチを用いて、バランスの神経制御に関する具体的な洞察が得られた。これらの例は、非侵襲的な脳刺激が姿勢の中で物体を観察することに基づいて運動セットを捕獲し、筋肉応答を用いて応答抑制を評価する技術を提供するために使用できることを示している。特に、この修飾されたリーン&リリース技術は、脳波や機能性近赤外分光法などの他の神経生理学的プローブを組み込むために容易に適応することができる。直接的な神経対策を含めなくても、外部力、筋肉の活性化、運動学に完全に焦点を当てた研究設計は、認知障害の行動マーカーに関する重要な洞察を提供することができます。例えば、反応的なステッピングタスク中に予想的な姿勢シフトをキャプチャするためにフォースプレートを使用するための興味深いアプリケーションが、Cohenららによって実証されている。彼らの研究では、高齢者の応答阻害の赤字は、不適切な体重シフトによって明らかにされ、その結果、選択反応ステップ時間の遅れにつながった。このようなアプローチは、重量シフトとステップエラーの敏感な尺度を得るために、現在のパラダイムに適用することができます。
この新しい方法は、参加者がサポートされているリーンから解放される確立された反応バランステストから構築され、行動の柔軟性を要求するシナリオが含まれます。応答阻害と行動選択を暴露するのに適したテスト設計は、認知心理学からバランス制御の領域に概念を適用する方法を可能にする。このようなアプローチは、認知機能の低下と転倒の有病率が相関しているという認識に基づいて構築し、認知リソースが転倒を防ぐ方法についての機械的な理解を得るために必要です。おそらく、このセットアップは、研究ツールとしてだけでなく、バランスのとれた認知的役割を訓練するための手段としても使用することができます。私たちの研究室では、脳が文脈情報を利用して、周囲の落下を防ぐのに最適な動きを更新する方法を理解することが重要な目的です。安定したハンドホールドの入手可能性や潜在的なステップバリアなどの手がかりは、必要が生じた場合にどの応答を行うかを導き、予測脳プロセス16をひそかに形作る可能性がある。特に、阻害性干渉制御や視覚空間記憶などの精神能力が必要な場合、この情報を適切に使用する能力は年齢とともに悪化する可能性がある。認知機能の低下と転倒の関係が1~3度あることを考えると、文脈上の関連性を統合する必要性を強調する研究計画を実施することは、多くの脆弱な集団におけるバランスの赤字に関する貴重な洞察を提供する可能性がある。
開示事項
著者らは開示するものは何もない。
謝辞
この出版物で報告された研究は、賞番号R21AG061688の下で国立衛生研究所の高齢化研究所によってサポートされました。コンテンツは著者の責任であり、必ずしも国立衛生研究所の公式見解を表すものではありません。
資料
| Name | Company | Catalog Number | Comments |
| CED Power1401 | Cambridge Electronic Design | Data acquisition interface | |
| Delsys Bagnoli-4 amplifier | Delsys | EMG equipment | |
| Figure-eight D702 Coil | Magstim Company Ltd | TMS coil | |
| Kistler Force Plates | Kistler Instrument Corp. | Multicomponent Force Plate Type 9260AA | Force plates |
| Magstim 200 stimulator | Magstim Company Ltd | TMS stimulation units | |
| PLATO occlusion spectacles | Translucent Technologies Inc | visual occlusion | |
| Signal software | Cambridge Electronic Design | Version 7 |
参考文献
- Mirelman, A., et al. Executive function and falls in older adults: new findings from a five-year prospective study link fall risk to cognition. PloS one. 7 (6), 40297 (2012).
- Herman, T., Mirelman, A., Giladi, N., Schweiger, A., Hausdorff, J. M. Executive control deficits as a prodrome to falls in healthy older adults: a prospective study linking thinking, walking, and falling. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 65 (10), 1086-1092 (2010).
- Saverino, A., Waller, D., Rantell, K., Parry, R., Moriarty, A., Playford, E. D. The Role of Cognitive Factors in Predicting Balance and Fall Risk in a Neuro-Rehabilitation Setting. PLOS ONE. 11 (4), 0153469 (2016).
- Rogers, M. W., Mille, M. -. L. Chapter 5 - Balance perturbations. Handbook of Clinical Neurology. 159, 85-105 (2018).
- Adkin, A. L., Campbell, A. D., Chua, R., Carpenter, M. G. The influence of postural threat on the cortical response to unpredictable and predictable postural perturbations. Neuroscience Letters. 435 (2), 120-125 (2008).
- Marlin, A., Mochizuki, G., Staines, W. R., McIlroy, W. E. Localizing evoked cortical activity associated with balance reactions: does the anterior cingulate play a role. Journal of Neurophysiology. 111 (12), 2634-2643 (2014).
- Horak, F. B., Nashner, L. M. Central programming of postural movements: adaptation to altered support-surface configurations. Journal of Neurophysiology. 55 (6), 1369-1381 (1986).
- Nashner, L. M. Fixed patterns of rapid postural responses among leg muscles during stance. Experimental Brain Research. 30 (1), 13-24 (1977).
- Varghese, J. P., Marlin, A., Beyer, K. B., Staines, W. R., Mochizuki, G., McIlroy, W. E. Frequency characteristics of cortical activity associated with perturbations to upright stability. Neuroscience Letters. 578, 33-38 (2014).
- Mansfield, A., Maki, B. E. Are age-related impairments in change-in-support balance reactions dependent on the method of balance perturbation. Journal of Biomechanics. 42 (8), 1023-1031 (2009).
- Maki, B. E., McIlroy, W. E. The role of limb movements in maintaining upright stance: the "change-in-support" strategy. Physical Therapy. 77 (5), 488-507 (1997).
- Lakhani, B., Mansfield, A., Inness, E. L., McIlroy, W. E. Characterizing the determinants of limb preference for compensatory stepping in healthy young adults. Gait & Posture. 33 (2), 200-204 (2011).
- Mansfield, A., et al. Training rapid stepping responses in an individual with stroke. Physical Therapy. 91 (6), 958-969 (2011).
- Mansfield, A., Inness, E. L., Lakhani, B., McIlroy, W. E. Determinants of limb preference for initiating compensatory stepping poststroke. Archives of Physical Medicine and Rehabilitation. 93 (7), 1179-1184 (2012).
- Cheng, K. C., Pratt, J., Maki, B. E. Effects of spatial-memory decay and dual-task interference on perturbation-evoked reach-to-grasp reactions in the absence of online visual feedback. Human Movement Science. 32 (2), 328-342 (2013).
- Dakin, C. J., Bolton, D. A. E. Forecast or Fall: Prediction's Importance to Postural Control. Frontiers in Neurology. 9, 924 (2018).
- Slobounov, S., Cao, C., Jaiswal, N., Newell, K. M. Neural basis of postural instability identified by VTC and EEG. Experimental Brain Research. 199 (1), 1-16 (2009).
- Maki, B. E., McIlroy, W. E. Cognitive demands and cortical control of human balance-recovery reactions. Journal of Neural Transmission. 114 (10), 1279-1296 (2007).
- Bolton, D. A. The role of the cerebral cortex in postural responses to externally induced perturbations. Neuroscience and Biobehavioral Reviews. 57, 142-155 (2015).
- Rossi, S., Hallett, M., Rossini, P. M., Pascual-Leone, A. Safety of TMS Consensus Group Safety, ethical considerations, and application guidelines for the use of transcranial magnetic stimulation in clinical practice and research. Clinical Neurophysiology: official journal of the International Federation of Clinical Neurophysiology. 120 (12), 2008-2039 (2009).
- Bolton, D. A. E., et al. Motor preparation for compensatory reach-to-grasp responses when viewing a wall-mounted safety handle. Cortex. 117, 135-146 (2019).
- Goode, C., Cole, D. M., Bolton, D. A. E. Staying upright by shutting down? Evidence for global suppression of the motor system when recovering balance. Gait & Posture. 70, 260-263 (2019).
- Rydalch, G., Bell, H. B., Ruddy, K. L., Bolton, D. A. E. Stop-signal reaction time correlates with a compensatory balance response. Gait & Posture. 71, 273-278 (2019).
- Gibson, J. J. . The Ecological Approach To Visual Perception. , (1979).
- Majid, D. S. A., Cai, W., George, J. S., Verbruggen, F., Aron, A. R. Transcranial Magnetic Stimulation Reveals Dissociable Mechanisms for Global Versus Selective Corticomotor Suppression Underlying the Stopping of Action. Cerebral Cortex. 22 (2), 363-371 (2012).
- Cohen, R. G., Nutt, J. G., Horak, F. B. Errors in postural preparation lead to increased choice reaction times for step initiation in older adults. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 66 (6), 705-713 (2011).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved