
Method Article
Reaktif Dengede Yanıt İnhibisyonu ve Eylem Seçimini Vurgulamak Için Modifiye Yalın ve Serbest Bırakma Tekniği
Bu Makalede
Özet
Burada, kullanıcının postural pertürbasyon sonrası dengeyi kurtarmak için uygun fiyatlı ve/veya kısıtlamaları seçici olarak değiştirmesine olanak tanıyan bir protokol sunuyoruz.
Özet
Reaktif dengenin değerlendirilmesi geleneksel olarak dik duruş veya yürüyüş için bir tür tedirginlik ve ardından ortaya çıkan düzeltici davranışın ölçülmesi de yüklenir. Bu önlemler kas yanıtları, ekstremite hareketleri, yer reaksiyon kuvvetleri ve hatta elektroensefalografi gibi doğrudan nörofizyolojik önlemleri içerir. Bu yaklaşımı kullanarak, araştırmacılar ve klinisyenler sinir sisteminin bir düşüşü önlemek için dengeyi nasıl kontrol ettiğini bazı temel ilkeler çıkarabilirsiniz. Bu değerlendirmelerin şu anda kullanılma şekliyle ilgili bir sınırlama da, otomatik postural reaksiyonları gözden geçirmeye gerek kalmadan refleksif eylemleri yoğun bir şekilde vurgulamalarıdır. Bu son derece basmakalıp tepkilere bu kadar özel bir odaklanma, ihtiyaç duyulması halinde bu reaksiyonları nasıl değiştirebileceğimizi yeterince ele almakta başarısız olacaktır (örneğin, bir kurtarma adımı ile bir engelden kaçınmak). Bu, her gün karşılaştığımız ortamların muazzam karmaşıklığı nı göz önüne alındığında göz kamaştırıcı bir ihmal gibi görünüyor. Genel olarak, dengenin nöral kontrolünü değerlendirirken statüko, daha yüksek beyin kaynaklarının karmaşık ortamlarda ki düşmeleri önlemeye nasıl katkıda bulundurduğuna gerçekten maruz kalmaktadır. Bu protokol, otomatik, ancak uygun olmayan düzeltici denge reaksiyonlarının bastırılmasını gerektiren bir yol sunar ve postural tedirginlik sonrasında dengeyi başarılı bir şekilde kurtarmak için alternatif eylem seçenekleri arasında bir seçim yapmaya zorlar.
Giriş
Düşme ve bilişsel gerileme arasındaki bilinen korelasyon rağmen1,2,3, büyük bir boşluk beyin aslında bize bir düşüş önlemek için ne yaptığını anlamada devam ediyor. Teoride, çevresel karmaşıklık arttıkça ve içgüdüsel davranışı gözden geçirmemiz gereken durumlarda bilişsel talepler vurgulanır. Ancak, çoğu denge testleri etkili yüksek beyin fonksiyonu vergi başarısız, bunun yerine refleksif düzeltme reaksiyonları vurgulayarak. Bir düşüşü önlemek için yanıt hızı gibi faktörler gerekli olmakla birlikte, inhibitör kontrolü ve/veya belirli bir içeriğe dayalı uygun eylemi seçme becerisi gibi ek bilişsel faktörler de bazı durumlarda önemli olabilir. Sonuç olarak, beynin reaktif dengedeki rolünü anlamamızın bir nedeni şu anda kullanılmakta olan araştırma protokolleridir. Rogers ve ark. son zamanlarda denge kontrolü dış pertürbasyon4kullanılarak değerlendirildi hangi farklı şekillerde özetlenmiştir. Bu yöntemler arasında platform çevirisi, eğimler ve/veya düşmelerin yanı sıra postural desteği iten, çeken veya kaldıran otomatik sistemlerin kullanımı yer almaktadır. Dik dengeyi bozmak için kullanılan çok çeşitli tekniklere rağmen, takip eden düzeltici reaksiyonlar hemen hemen her zaman engelsiz bir ortamda yapılır ve böylece hareket üzerindeki kısıtlamalar en aza indirilir. Burada, bilişsel süreçlerin güçlü eylemi geçersiz kılmak ve reaktif denge görevinde alternatifler arasında uygun yanıtları seçmek için gerekli olan bir yöntem öneriyoruz.
Reaktif dengeyi test etmek için ortak bir yol sabit bir destek (genellikle ayak-in-place) reaksiyonu,6,,7,8,9kullanarak karşı olabilir nispeten küçük postural pertürbasyonlar empoze etmektir. Nispeten daha az çalışma bel çeker, platform çeviri yoluyla tedirginliklere yanıt olarak destek dengesi reaksiyonları değişim odaklanmıştır ve bir örnek olarak bir destek kablosu serbest, Mansfield ve ark10bakın . İkinci grubun önemi, tedirginlikler büyük olduğunda, destek değişimi reaksiyonlarının stabiliteyi geri kazanmak için tek seçenek olduğunu kabul ederek takdir edilebilir11. Aslında, ayak-in-place (yani, kalça ve / veya ayak bileği) stratejileri kullanılarak yönetilebilir küçük pertürbations için bile, insanlar sık sık seçim verildiğinde adım tercih11. Bu tür destek değişim tepkilerini incelemenin değeri sadece daha büyük bir tedirginlik büyüklüğüne karşı koymakla kalmıyor, aynı zamanda yeni bir destek tabanı oluşturmak için uzuvları yeniden konumlandırırken ortaya çıkan zorluklarda da yatacaktır. Uygun fiyatlı ve/veya eylem kısıtlamalarının varlığı birçok gerçek dünya ayarlarının düzenli bir parçasıdır. Bu, denge kaybı olduğunda yeni bir destek üssü oluşturmaya bir seçim süreci zorlar. Karmaşık ortamlara davranış adapte etmek için, yüksek beyin kaynakları üzerinde artan bir talep vardır. Bu özellikle uzuvlar destek yeni bir temel kurmak gerekir doğrudur. Reaktif dengede bilişsel rolleri vurgulamak ve ortaya çıkarmak için dağınıklığı yeniden ortaya koyma ve uzuvlarla destek değiştirme stratejisini zorlama ihtiyacı mantıklı görüner.
Harici kaynaklı postural pertürbasyon sunmak için basit bir yolu yalın & serbest bırakma tekniği, bir birey aniden desteklenen bir ileri yalın serbest bırakılır. Bu yaklaşım, ileri bir düşüş önlemek için telafi edici reaksiyonların değerlendirilmesi sağlar ve başarıyla hem sağlıklı hem de klinik popülasyonlarda kullanılmıştır12,13,14. Yalın ve serbest bırakma tekniği biraz temel olmasına rağmen, reaktif denge kapasitesi (örneğin, bir kurtarma adımını ne kadar hızlı başlatabilir veya kararlılığı yeniden kazanmak için gereken adımların sayısını belirlemek için) hakkında değerli bilgiler sunar. Mevcut amaçlar için, yalın ve serbest bırakma tekniği reaktif dengebilişsel rolleri keşfetmek için basit bir yol sağlar çünkü pertürbasyon özellikleri nin çoğu sabit tutulur. Bu, özellikle eylem seçimi ve yanıt inhibisyonu ile ilgili değişkenler üzerinde daha fazla deneysel kontrol sağlar. Postural pertürbasyonun diğer modları genellikle tedirginlik yönü, genlik ve zamanlama açısından öngörülemezliğe dayansa da, çevre deki ortam her zaman sabittir. Bacak bloklarının kavrama tepkilerini vurgulamak için kullanıldığı çalışmalarda bile15 blok, bir bacak bloğunun varlığına veya yokluğuna bağlı olarak adım atma davranışlarını hızlı bir şekilde uyarlamaya gerek kalmadan sabitlenir. Şu anda önerilen yöntemle, düşmeyi önlemek için çevreyi davranışsal adaptasyon gerektiren bir şekilde değiştirebiliriz.
Reaktif dengede bilişsel rolleri yetersiz bir şekilde ortaya çıkaran laboratuvar ayarlarının ötesinde, bir diğer önemli konu da kas setleri, yer tepki kuvvetleri ve nöral süreçleri ortaya çıkarmak için video çekimi gibi dış önlemlere aşırı derecede güvenmektir. Bu önlemler değerli olmakla birlikte, bu tür önlemlere özel güven dengeye katkıda bulunan temel sinirsel mekanizmalar hakkında doğrudan bilgi sağlamaz. Bu sorun, beynin karmaşık ortamlarda bir düşüşü önlemek için neler yapabileceğini göz önünde bulundurarak daha da karmaşık bir şekilde düşmeden önce meydana gelebilir. Sonbahar önlemede tahmine dayalı roller son zamanlarda daha kapsamlı bir şekilde tartışılmıştır16. Araştırma yönleri gelecekteki istikrarsızlık tahmin içerir17, çevremiz de hareket olarak visuospatial haritalar bina18, ve muhtemelen bir sonbahar19önceden bilmeden bile çevreye dayalı olası durumlar oluşturma . Bu tür hazırlıkların ortaya çıkması doğrudan nörofizyolojik problar kullanılmadan tamamen erişilemez olacaktır.
Şu anda önerilen değiştirilmiş yalın ve sürüm yaklaşımı, bahsedilen mevcut sınırlamaların bazılarını aşmak için bir araç sunar. Bu, ekstremitelerin seçim gerektiren bir ortamda yeni bir destek tabanı oluşturması gereken bir test senaryosu kullanılarak yapılır. Bu yaklaşım, kuvvet üretimi ve hareket yakalama nın dış salkımlarını tamamlayabilen postural pertürbasyondan önce ve sonra doğrudan beyin aktivitesi (örn. transkraniyal manyetik stimülasyon, TMS) dahil edilerek artırılır. Deneysel özelliklerin bu birleşimi, beynin yanıt inhibisyonu ve seçenekler arasında eylem seçiminin bir düşüşü önlemek için çağrıldığı karmaşık ortamlarda dengeye nasıl katkıda bulunduğuyla ortaya çıkan önemli bir yeniliği temsil eder. Burada, bir düşüşü önlemek için bilişsel süreçlerin davranışı adapte etmesi gereğini vurgulayan bir ortamda reaktif dengeyi test etmek için yeni bir yöntem gösteriyoruz. Engellerin ve eylem için uygun lukların birleşimi, yanıt inhibisyonu, hedefli eylem ve seçenekler arasında yanıt seçimi gereksinimini zorlar. Ayrıca, görsel erişim, nöral probların zamanlaması, yanıt ortamının değiştirilmesi ve postural pertürbasyonun başlangıcı üzerinde kesin zamansal kontrol gösteriyoruz.
Protokol
Tüm prosedürler Utah Eyalet Üniversitesi Kurumsal İnceleme Kurulu'ndan onay aldı ve Helsinki Bildirgesi'ne uygun olarak yürütüldü.
1. Katılımcı taraması
- Katılımcıların test öncesinde prosedürlere yazılı bilgilendirilmiş izin vermelerini sağlayın.
- TMS ile test etmek için, bir grup uzman tarafından geliştirilen yönergeleri kullanarak TMS'ye uygunluklarını değerlendirmek için test öncesi ekran katılımcıları20.
2. Veri toplama: elektromiyografi (EMG)
- Yüzey elektrotlarını kullanarak EMG kaydedin ve sinyalleri yükseltin (kazanç = 1.000; bkz. Malzeme Tablosu).
- Veri toplama arabirimi ve uygun yazılım (bkz. Malzeme Tablosu)kullanarak veri ve bandpass filtresi (10-1.000 Hz) edinin. Çeşitli motorları, kablo salınımını ve oklüzyon gözlüklerini daha sonra yöntemlerde açıklandığı gibi kontrol etmek için bu cihazı ve yazılımı kullanın.
- Yavaşça cilt yüzeyini aşındırın ve hedef kas yerleri üzerinde alkol ile silin. Yüzey EMG elektrotlarını iki taraflı bant kullanarak hedef kaslara sabitleyin ve özellikle kollar ve bacaklarla hızlı tepkiler sırasında elektrotların sabit kalmasını sağlamak için prewrap kullanarak daha da güvenli hale getirilin.
- Sağ el (ilk dorsal interosseus, DYP ve opponens pollicus, OP) ve her iki bacakta ayak bileği dorsifleksörler (tibialis anterior, TA) iki içsel el kaslarından EMG verileri toplamak.
NOT: Bu özel kaslar bir ulaşmak-kavramak eylem veya ileri adım alaka göre seçilmiştir, ancak diğer kaslar gerektiği gibi seçilebilir.
3. Denge test ekipmanları

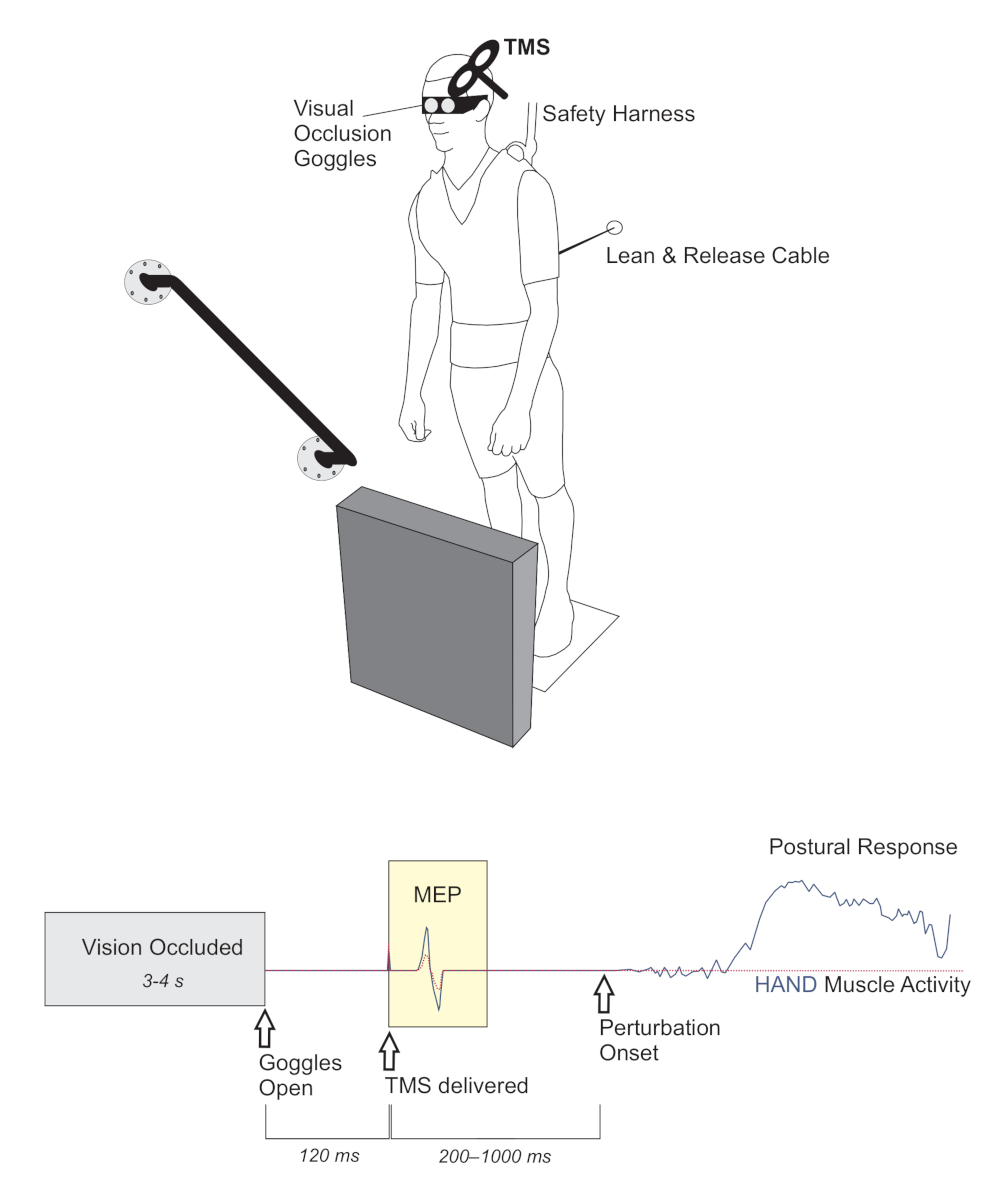
Şekil 1. Bacak blokları ile Yalın ve serbest kurulum. Bu örnekte, bir bacak bloğu açık konumda, diğeri ise bir adımı engelleyecek şekilde ayarlanır. Bu bloklar bilgisayar kontrollü motorlar (destek direklerine bağlı gri kutular) ile taşınır. Tutamak kapakları da blok veya bir erişim-kavrama tepkisi ne izin taşınır. Burada, kapaklar tutamacın tam görünümünü sağlamak için ayrılmıştır. Serbest bırakma mıknatısı arka duvarda görülebilir. Tüm kablolar ahşap platformun kendisinden beslenir ve arka köşede bulunan gri devre kutusuna girer. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 2. Kuvvet plakaları ile yalın ve serbest kurulum. Bu şekil, üç kuvvet plakasının isteğe bağlı olarak ahşap platforma nasıl yerleştirilebileceğini tasvir eder. Kuvvet plakaları gerekli değilse, ahşap fişler yerine ayarlanabilir. Bu fişler, yan duvara yaslanmış görünür. Bu resim aynı zamanda katılımcılar tarafından giyilen emniyet kemerini de göstermektedir. Bu koşum, katılımcının dengesini kendi başına toparlayamadığı takdirde bir güvenlik mekanizması olarak hareket etmek üzere tavana sabitlenir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Modifiye yalın & sürüm sistemi
- İleriye dönük tedirginlikleri empoze etmek için özel yapım, yalın ve serbest bir kablo sistemi kullanın (Bkz. Şekil 1 ve Şekil 2).
- Katılımcıların ayakları yaklaşık kalça genişliği dışında ileri yalın bir pozisyonda durmalarını öngörmelerini (bkz. Şekil 3). Kabloya bağlı bir gövde kayışı kullanarak bu ileri yaslanmayı koruyun, bu da arkalarındaki duvara sabitlenir. Kabloyu koşumun arkasına (yaklaşık orta toraks seviyesinde) bağlayın. Destek kablosunu duvara mıknatısla sabitleyin. Mıknatıs kabloyu serbest bırakmak için kısa bir süre devre dışı bırakılacaktır.
- Belirli deneme prosedürlerini (örneğin, kablo serbest bırakıldığında ve kablo nun piyasaya sürülmesi nin başlangıcı) katılımcı için öngörülemez hale getirin. Önceden ayarlanmış bilgisayar komutları aracılığıyla kablo yayınının kesin zamanlamasını bir yazılım yapılandırmasına dönüştürün. Bu yapılandırma, kablo yayınının zamanlamasının denetimini sağlayarak denemeler arasında rasgele hale getirilebilir.
NOT: Tüm deneysel aygıtları kontrol eden yazılım yapılandırması (örneğin, bir bacak bloğunu konumlandırmak için motoru tetikleyen) belirli deneme durumunu ayarlar (örneğin, bir bacak bloğu varsa veya değilse). Bu, koşulları rasgele hale getirmek veya öngörülebilirlik düzeyini kontrol etmek için bloklar halinde teslim etmek için programlanabilir. - Koşumunun arkasına takılan bu serbest bırakma kablosuna ek olarak, katılımcıları tavandan sarkan bir destek kablosuna sabitleyin. Bu arıza emniyetli kablo kesinlikle gerekli olmadıkça vücut ağırlığı desteği sağlamaz. Bir katılımcı dengeyi kendi başına toparlayamıyorsa, kablo yere düşmeden önce onları yakalar.
- Güvenilir görsel bilgilerin önemi nedeniyle, katılımcıların gözlükleri takarken sap ve bacak bloğunu gerçekten görebiyi doğrulayın. Her denemeye, katılımcılara başlarını rahat bir pozisyonda tutarken, yaklaşık 3 m önde, yerdeki sabit bir noktaya doğrudan bakmalarını öğreterek başlayın. Katılımcıları, bakışlarını periferik görme alanında ve engelin üst kısmında görmek üzere ayarlı şekilde konumlandırın.
- Tutamacın kavranabilir aralıkta olduğundan emin olmak için gövdeyi yerleştirin. Katılımcının her iki ayağını da zeminle temas halinde tutarken öne doğru eğilin. Vücudun geri kalanı düz bir çizgide kalırken bu ayak bileği hakkında rotasyon gerektirir.
- Kablo serbest bırakıldığında dengeyi kurtarmak için ileri adımın gerekli olduğu minimum yalın açı olarak belirli yalın konumu belirleyin. Bu, ayak bileği ekleminde bir eşik yalın açısı bulmak için bir yinelemeli bir süreçtir, hangi katılımcı artık bir ayak-in-yerinde reaksiyon kullanarak ileri düşmesini önlemek mümkün olduğu açıdır. Bu kurulduktan sonra, goniometri kullanarak test boyunca yalın açı doğrulayın.
- Telafi edici denge yanıtları için uygun luklar ve kısıtlamalar
- Sağ taraftakatılımcıların yanında duvara bir güvenlik kolu sabit. Bu tutamak erişimini kontrol etmek için motorlu bir kapak kullanın. Tutamak ortaya çıkarsa, katılımcılar desteklenen ileri yalın serbest bırakıldığında dengeyi yeniden kazanmak için kullanılabilir.
- Sapının ortaya çıktığı denemeler sırasında, katılımcının bacaklarının önüne bir bacak bloğu yerleştirin. Bacak bloğu bir adımı engeller, ancak katı bir şekilde yerleştirilmez, yani tekmelendiğinde yerinden edilebilir. Serbest dolaşıma izin vermek için bacak bloğunu programla ve yaralanmayı önlemek için uyumlu malzeme ile inşa edin.
NOT: Bacak blokları yerden yaklaşık 30 inç (çoğu kişi de orta uyluk seviyesi) yükselmeye verilen bir 'all-or-none' adım kararı zorlamak için inşa edilmiştir. Bir kurtarma adımı daha nüanslı bir abluka ilgilenen araştırmacılar için, bu cihazlar daha sonra onları temizlemek için uyarlanmış bir adım sağlayacak daha küçük / daha kısa bir engel kullanmak için değiştirilebilir. - Tutamacı kapatmak ve belirli denemelerde görünümünü engellemek için siyah bir muşamba kullanın. Tutamaç aynı konumda monte kalır, ancak doğrudan görsel erişimi önlemek ve destekleyici kavramayı önlemek için fiziksel olarak kaplanır. Bu destek kolu kaplandığında, gerekirse bir adım reaksiyonu sağlamak için bacak bloğunu çıkarın.
- Görme nin kontrolü
- Görme yetisini, sıvı kristal gözlüklerle postural tedirginlik ve kontrolden hemen önceki zaman dilimiyle sınırlandırın (bkz. Malzemeler Tablosu). Kapalıyken, gözlükler görsel sahneye erişimi engeller, böylece katılımcılar yaklaşan yanıt durumundan habersizdir.
- Gözlükler kapalıyken bacak bloğunun özel yapılandırmasını değiştirin ve her deneme için kullanılabilirliği saplayın, böylece katılımcıların gözlükler açıldıktan sonra ortamı hızlı bir şekilde algılamaları gerekir. Her denemenin başında bilgisayar tetikli servo motorlar aracılığıyla sap kapağını ve bacak bloğunu konuma getirin. Katılımcıların kulak tıkacı takmalarını ve yaklaşan durum için ileri derecede işaretlenmeyi önlemek için görsel tıkanma döneminde motorları sürekli hareket ettirmelerini bekleyin.
4. Deneysel tasarım
- Testten önce, katılımcılara sapa nasıl ulaşacakları ve eğilmiş bir konumdan nasıl ileri ye gideceklerini kısaca öğrenin.
- Katılımcılara yaklaşan uygulama durumu hakkında tam bilgi sağlayın ve belirsizlik olmadığından emin olun. Katılımcılara, gözlükler açıldıktan sonra tutamacın kapalı olduğunu ve atlama yolunun açık olacağını öğretin. Kısa bir süre sonra, destek kablosu serbest kalacak ve öne düşmemek için hızlı bir şekilde adım atmak zorunda kalacak.
- Bir adımdan kaçınmak için tutamacın kullanılabilir olup olmadığına ilişkin benzer yönergeleri kullanın.
- Test ve uygulama boyunca, katılımcılara ani bir kablo yayını ile hareket etmek istenmedikçe rahat kalmalarını emredin.
NOT: Katılımcılar, resmi testler başlamadan önce ortalama olarak yaklaşık 10 alıştırma denemesi gerektirir.
- Denemeler arasındaki yanıt ayarını rasgele değiştirin. Destek kablosundan serbest bırakılırsa, katılımcıların duvara monte edilmiş güvenlik koluna uzanarak veya adım yolu açıksa öne çıkarak stabilitelerini yeniden kazanmalıdır.
- Her denemenin başındaki tıkalı gözlükleri her zaman kapatın ve yanıt ayarı değiştirilecektir. Ayarın değişmesine izin vermek için gözlükleri randomize bir süre (genellikle yaklaşık 3-4 s) kapatın.
- Gözlükler açıldığında, iki olası yanıt ayarlarından birini sağlayın: (1) bacak bloğu mevcut ve destek kolu mevcut veya (2) bacak bloğu yok ve destek kolu yok.
NOT: İlk durumda, rahat bir erişim mesafesinde bir destek kolu mevcuttur ve bacak bloğu bir adımı engeller. Bu ayar, mevcut tek seçeneğin sağ kollarıyla kullanılabilir destek kolunu hızlı bir şekilde kavramak olduğu bir bağlam dayatmar. İkinci koşul, destek tanıtıcısının kullanımını engellerken bir kurtarma adımına olanak tanır. - Tedirginlik meydana geldiği denemelerde, gözlükler açıldıktan kısa bir süre sonra kabloyu bırakın. Bu gecikme süresi çalışma gereksinimlerine göre değişir, ancak 200-1.000 ms arasında değişmektedir.
- Bazı denemeler için, bir yakalama deneme olarak hareket serbest bırakmayın. Bu, yalnızca vizyona dayalı beklenti yanıtlarını önlemeye yardımcı olur.
- Katılımcıların gerektiği gibi sıfırlamaşansı sağlamak için denemeler arasında kısa bir duraklama ile her deneme son 10 s var. Katılımcılara her test bloğu arasında kısa bir dinlenme süresi verin ve onların oturabilmelerine izin verin. Temel deneysel tasarım Şekil 3'te (altta) gösterilmiştir.
NOT: Toplam deneme sayısı her çalışmanın ihtiyaçlarına göre değişir, ancak üç ila dört test bloğu arasında bölünmüş yaklaşık 100 deneme yi içerme eğilimindedir.

Şekil 3. TMS tabanlı yöntem, çevresel karşılanmaları ve/veya kısıtlamaların motor hazırlığı üzerindeki etkisini araştırmak için kullanılır. ÜST TE. Bir yalın & serbest bırakma aparatı, katılımcıları öngörülemeyen bir şekilde serbest bıraktı (yalnızca pertürbasyon test blokları). Tedirginliğin büyüklüğü, ya güvenli bir dayanak noktası ulaşarak ya da ileri bir adım atarak istikrarlı bir destek tabanı nı yeniden kurmak için kol veya bacağı kullanarak hızlı bir destek tepkisi ne gerektirmiş? Denemeler arasında sıvı kristal oklüzyon gözlükleri kullanılarak görüş ler tıkandı ve ön plandaki nesneler rastgele yeniden düzenlendi. ALT TABAKADAN. Zaman çizelgesi, ortama görsel erişimin ne zaman kullanılabilir hale geldigini ve TMS sondalarinin zamanlamasını hem görsel eriyme hem de tedirginlilik ile göregiyi gaçıkeder. TMS kas yanıtı pik-to-pik genlik (yani, motor uyarılmış potansiyel, MEP) pertürbasyon öncesi zaman diliminde kortikospinal uyarılabilirlik bir indeks sağladı. Bu şekil, el eylemi için bir karşıgücün (düz, mavi çizgi) ve tutamacın kaplandığı (noktalı, kırmızı çizgi) bir denemenin varsayımsal etkisini göstermek için teorik yanıt verilerini sunar. Bu şekilde, her iki deneme/ koşul, belirli bir çevresel içeriğe dayalı potansiyel eylemi kolaylaştırmak veya bastırmak için motor çıktısının hazırlanmasının varsayımsal etkisini göstermek için üst üste bindirilir. Bolton ve ark.21'dekiŞekil 1'den uyarlanmıştır. Bu örnekte Kortikospinal eksizitlenebilirliği araştırmak için TMS'nin kullanıldığını unutmayın. Ancak, bu yalnızca bu değiştirilmiş yalın ve sürüm kullanarak olayların dizisinin temel bir temsili sağlamak için tasarlanmıştır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
5. TMS protokolü (isteğe bağlı)
- Katılımcılar ileri ye doğru desteklenirken el motor kortikal gösterimi üzerinden tek darbeli TMS sunun. Gözlükleri açtıktan kısa bir süre sonra ancak herhangi bir hareketten önce çevrenin görüntülenmesinin motor kümesini nasıl etkilediğini araştırmak için TMS darbeleri sunun. TMS'nin teslim edildiğinde dahil olmak üzere, deneme sırasındaki olayların dizisini görselleştirmek için Şekil 3'e bakın.
- TMS tesliminin zamanlamasını araştırma sorusuna göre ayarlayın. Temsili sonuçlarda stimülasyon 100 ms ile 200 ms arasında görüş sonrası değişmektedir. Yukarıda listelenen yanıt ayarlarına ek olarak, gözlükleri açmadan TMS sunmak için test boyunca rasgele 'görmeme' referans denemelerini serpiştirin. Bu koşulun amacı, motor aktivitesindeki görevle ilgili herhangi bir değişiklik için bir temel sağlamaktır (örn. artan uyarılma).
NOT: Belirli TMS prosedürleri hakkında daha fazla bilgi Bolton ve ark.21 ve Goode ve ark.22bulunabilir. - Sagital düzleme yaklaşık 45° yönlendirilen uyarıcı bobinile birincil motor kortekse (M1) manyetik uyaranlar sunun (Bkz. Malzeme Tablosu). Sağ taraftaki FDI kaslarında motor uyarılmış potansiyel (MEP) elde etmek için en uygun pozisyonda uyaranları uygulayın (örn. motor 'hotspot').
- 'Hotspot' bulunduktan sonra, bir test uyarıcı yoğunluğu belirlenir belirlemek. Mevcut araştırma amaçları için, bu ortalama MEP yaklaşık 1-1,5 mV tepeden tırnak tır. Bu konumdaki TMS bobinini düzeltin ve kafa hareketi oluşursa (örneğin, kablo salınımını takip ederek) bobin konumunu sıfırlayın. Denekler kortikospinal eksititititititite üzerinde herhangi bir postural durum etkisi için hesap ileri yalın dururken test uyarıcı yoğunluğunu belirleyin.
Sonuçlar
Sunulan tüm örnek çalışmalar 18-30 yaş arası genç kadın ve erkeklerde yapılmıştır. Her çalışmanın toplam örneklem büyüklüğü aşağıdaki gibidir: Örnek 1 (Rydalch ve ark.23)12 katılımcıyı, Örnek 2'yi (Bolton ve ark.21)63 katılımcıdan, Örnek 3 'e (Goode ve ark.22)19 katılımcıdan olenmiştir. Okuyucu yöntem ve analizler hakkında ayrıntılı bilgi için tam çalışmalara başvurmalıdır.
Örnek 1
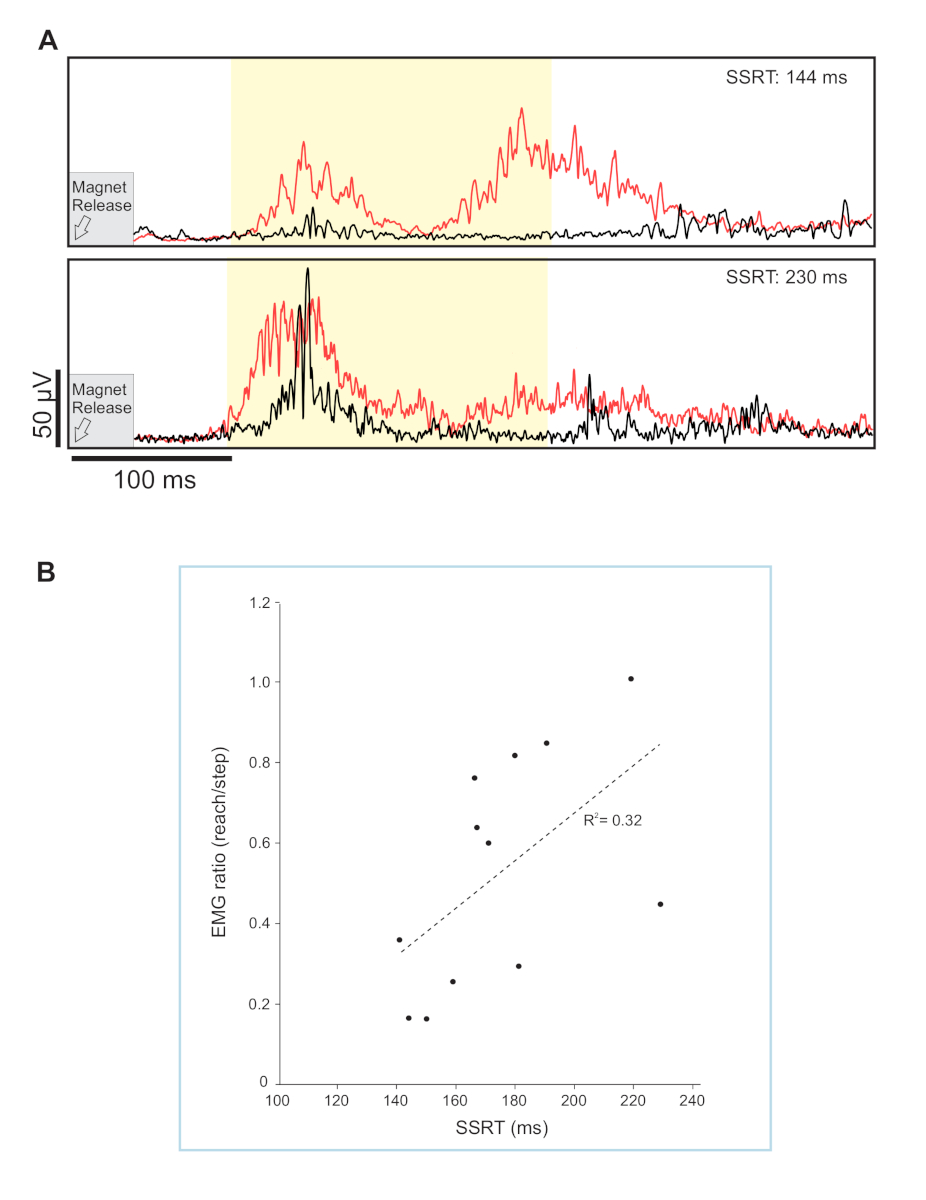
Hızlı bir iyileşme adımını engelleme, özellikle de sık tekrarla otomatik olarak adım atıldığında, postural bağlamda yanıt inhibisyonunun değerlendirilmesinde izin verilir. Burada, bir ileri adım ya izin verildi ya da23engelledi bacak kas yanıtı karşılaştırıldı. Step bacak kas yanıtı katılımcının ulaşması gereken reach çalışmalar ile adım atması gereken denemeler arasında karşılaştırıldı. Bu, ayak bileği dorsiflektörlerinin (tibialis anterior) yanıt büyüklüğünü nkarşılatılarak adım denemelerine ulaşArak gerçekleştirilmiştir. Özellikle, 200 ms pencere (yani, 100 ms için 300 ms pertürbasyon sonrası) üzerinde entegre EMG bir kas yanıt oranı hesaplamak için kullanılmıştır. Daha küçük bir değer Rydalch ve ark.23ayrıntılı olarak açıklandığı gibi adım kaçınmak için daha büyük bir yetenek gösterdi. Kas tepkisinin büyüklüğünü kullanarak, niyetimiz bacakla yanıt verme eğilimi için hassas bir gösterge sağlamaktı. Bu örnekte, çalışmamızın amacı, bir denge kurtarma adımının bastırılmasının gerekli olduğu reaktif denge görevinde performansla ilişkili bir bilişsel testle (yani, sinyal görevini durdurma, SST) ile ölçülen yanıt inhibisyonu olup olmadığını belirlemektir. Denge görevinde, %30'u bacak bloğu olmak üzere toplam 256 deneme toplandı. Şekil 4A'da,adımla ilgili bacak aktivitesini bastırmak için sürekliliğin zıt uçlarında olan bireylerin ortalama dalga formlarını vurgularız. Şekil 4B'deki dağılım konusu, dur-sinyal tepki süresi ile ölçülen engellenmiş bir adımı bastırma yeteneği ile yanıt inhibisyonu arasında küçük ama önemli bir korelasyon gösteriş.
Bu sonuçları yorumlarken, sst (Ekaçıklanan), ve gerçekten en bilişsel testler, basit yanıtlar (genellikle parmak hareketleri) bir bilgisayar ekranında görüntülenen zorunlu ipuçları yanıt olarak oturan katılımcılar tarafından yapılan güvenmek tanımak önemlidir. Rydalch ve ark. tarafından yapılan bu çalışmada, prepotent bir yanıtı durdurma yeteneğinin, telafi edici adımların zaman zaman bastırılması gereken reaktif denge testi ile karşılaştırıldığında standart bir oturmuş yanıt inhibisyonu testi boyunca korunup korunmadığı ele alınmıştır23. Sonuçlar bilişsel test sonucu (sinyal reaksiyonu süresi durdurmak) ve telafi edici adım arasında bir korelasyon gösterdi, hangi bir bireyin durdurma kapasitesi çeşitli görevler arasında genelleşir düşündürmektedir.

Şekil 4. Ortalama adım bacak yanıtı. (A) Ortalama dalga formları, basamak bacağındaki tibialis anterior için gösterilir. Adım denemeleri kırmızı renkte gösterilir ve siyah alalı denemelere ulaşır. Hızlı (üstte) veya yavaş durdurma (alt) sinyal tepki süresine sahip iki katılımcı için gösterilen örnek kas yanıtı verileri. Bu durdurma sinyali reaksiyon süresi durdurma yeteneği milisaniye lik bir ölçü sunar. Erken kas yanıtı (entegre EMG) 100-300 ms (açık sarı gölgeli bölge) ölçüldü. (B) 400 ms görsel gecikmede kas tepki oranı ile stop-signal reaksiyon süresi (SSRT) arasındaki korelasyongösteren dağılım, r = 0,561; p = 0,029' u. Şekil 3 ve 5'ten uyarlanan Rydalch ve ark.23. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Örnek 2
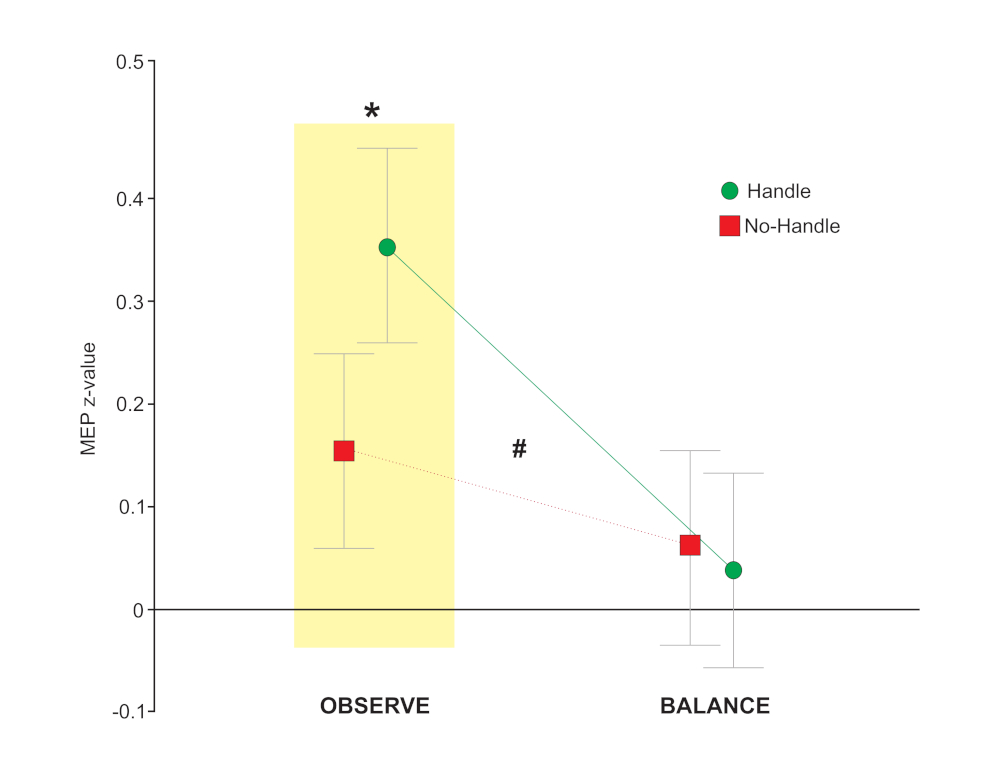
Bu çalışma, TMS ile kombine edildiğinde modifiye yalın ve sürüm kurulumuzun vizyona dayalı motor hazırlığı nda nasıl kullanılabileceğini örneklemektedir. Göze alım sadas kavramı (başlangıçta Gibson tarafından önerilen24)ayakta postural bağlamda test edildi, bir el kası kortikospinal uyarılabilirlik olup olmadığını belirlemek için (kavramak için kullanılan) destekleyici bir kolu görüntülerken kolaylaştırıldı. Bu yaklaşımın anahtarı, motor sistemin uyarıcı durumunun sadece görmeden nasıl etkilendiğini değerlendirmekti. Özellikle, TMS darbeleri gözlükler açıldıktan kısa bir süre sonra, ancak hareket için herhangi bir işaret (yani, kablo serbest bırakılması) önce teslim edildi. Bu şekilde sadece görme sahnesiile ilgili motor aktivite analiz edilirken, tedirginlik için davranışsal yanıt ikincil olarak ele alındı. Yukarıdaki çalışmadan farklı olarak, adım yanıtını daha sık sunarak yanıt inhibisyonu ihtiyacını vurgulayan bu çalışmada, el eyleminin görsel astarına odaklanmak için eşit işlemde elek (erişim) ve no-handle (adım) olasılığı kullanılmıştır. Sonuçlar, sapın görüntülenmesinin içsel bir elin (yani kavrama) kasının kolaylaştırılmasına yol açtığını, ancak sadece saf gözlem durumunda olduğunu göstermiştir(Şekil 5)21. NOT: Örnek veri, edinme ve analiz yazılım kodu için, rehberlik notları ile birlikte açık bilim çerçevesine (https://osf.io/9z3nw/) bakın. Örnekler 1 ve 3 belirli eyaletlerde değişiklikler ile, benzer kod ve yordamlar kullanılır.

Şekil 5. Katılımcılar destekli bir yalın durdu ise REACH için kortikospinal uyarılabilirlik farkı gösteren veriler (yani, kolu) ve STEP (yani, no-sap) içsel bir el kası denemeler. Bu, tutamaç mevcutken elde daha fazla etkinlik gösterdi ve katılımcılar sadece tutamacı (OBS) görüntüledi, ancak kablonun periyodik olarak serbest bırakıldığı ayrı bir denge (BAL) deneme blokları sırasında bu etki yoktu. Hata çubukları ortalamanın standart hatasını gösterir. İki yönlü tekrarlanan önlemler ANOVA durum ve uygunluk, F1, 62 = 5,69, #p = 0,020 arasında bir etkileşim ortaya koymuştur. Belirli hipotezlerimizi ele almak için, her koşulda ayrı ayrı kullanılabilir durumda bulunan fdi'deki MEP genliği daha büyük olup olmadığını belirlemek için önceden planlanmış karşılaştırmalar yaptık. Hipotez 1 için, OBS koşulu ndaki uygun fiyat düzeylerini (STEP, REACH) karşılaştırmak için planlı karşılaştırmalar kullanıldı ve sap görünürken genlikte önemli bir artış ortaya çıktı, t121 = 2.62, *p = 0.010. Hipotez 2 için, başlangıçta bir etkileşimi öngörmüştük, ama bulunandan tam tersi yönde. BAL koşulu içinde uygun fiyatlı planlı karşılaştırma bir kolu varlığı ile ilgili önemli bir fark gösterdi, t121 = -0.46, p = 0.644. Şekil 5, Bolton ve ark.21'denuyarlanmıştır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Örnek 3
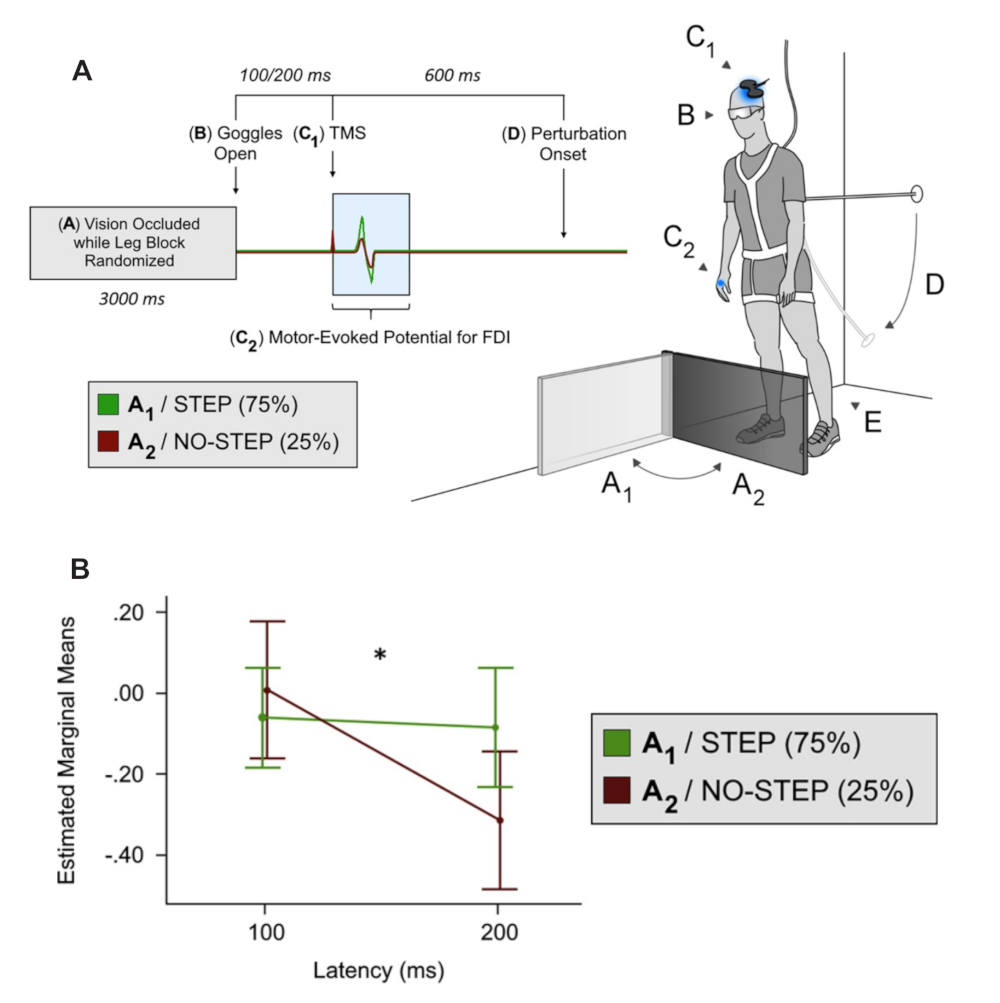
Bu son örnek, bu cihazı bir kez daha görme dayalı bir el kasının motor hazırlık çalışması için nasıl adapte olduğunu vurgular ama hızlı bir şekilde bacak eylem bastırmak için ihtiyaç üzerinde duruldu. Bu sürümde, sap kapağı kalıcı olarak kapatıldı, sadece bacak bloğu hareket ederken. Örnek 1'de olduğu gibi, otomatik bir adımı teşvik etmek için adım adedine karşı durma olasılığı manipüle edilmiştir. Bu çalışmada sapın artık bir seçenek olmadığı göz önüne alındığında, ayak bileğinde ölçülen ileri eğilme derecesi sabit bir destek reaksiyonuna izin vermek için biraz düşürüldü (yukarıdaki iki çalışmada olduğu gibi ~6° vs. ~10°). Görevin bu sürümü için özel kullanım küresel bastırma kavramını araştırmak oldu, daha önce odak düğme presleri bir bilgisayar ekranında sunulan görsel uyaranlara yanıt olarak kullanılan oturmuş görevlerde araştırılmıştır25. Örnek 2'de olduğu gibi, Yanıt ortamına (yani blok veya blok suz) erişildikten hemen sonra içsel bir el kasındaki kortikospinal eksitititititeyi değerlendirmek için TMS teslim edilmiştir, ancak herhangi bir işaretten önce (yani, kablo yayını). Sadece bacak yanıtları kullanılan bir görev bir içsel el kas test etmek için mantığı bir görev alakasız kas motor sistemi boyunca genel bir bastırma kanıtı göstereceğini görmek oldu. Şekil 6'da aşağıda gösterilen sonuçlar, otomatik bir adım aniden durdurulduğunda motor sistemi genelinde yaygın bir kapatma kanıtı göstermektedir22.

Şekil 6. Yalnızca bacak bloğu ile modifiye yalın ve serbest bırakma görevi (örneğin, bir destek tutamacı nı kavrama seçeneği yoktur). (A) Bu şekil, bir bacak bloğu sunulduğunda içsel bir el kasıme MEP genlik bastırma gösteriş (yani, NO-STEP durum). (B) Tekrarlanan ölçümlerden ANOVA, adım koşulu x gecikme etkileşimi, F1,18 = 4,47, p = 0,049 anlamlıydı. Çizgi grafiği 2'nin görsel incelemesi, yalnızca NO-STEP durumu için zaman içinde MEP genliği azalan ortaya koymaktadır ve bu takip karşılaştırmaları ile doğrulandı. Özellikle, bu karşılaştırmalar NO-STEP durumu için 100 ms t18 = 2.595, *p = 0.009 ile karşılaştırıldığında 200 ms önemli bir azalma ortaya koymuştur. Buna karşılık, STEP durumu için 200 ms ile 100 ms arasında benzer bir karşılaştırma t18 = 0.346, p = 0.367 arasında bir fark olmadığını gösterir. Şekil 1 ve 2'den uyarlanan Goode ve ark.22. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Tartışmalar
Bu değiştirilmiş yalın ve serbest bırakma sistemi reaktif dengebilişsel rolleri değerlendirmek için yeni bir yol sağlar. Standart yalın ve serbest bırakma prosedüründe olduğu gibi, kablo salınımının zamanlaması tahmin edilemezken, postural pertürbasyonun yönü ve genliği konu için tahmin edilebilir. Mevcut yaklaşımda benzersiz olan şey, özne sabit kalırken vizyona erişimin tam olarak kontrol edilmesi ve farklı eylem fırsatları ve/veya kısıtlamalar oluşturmak için yanıt ortamının etraflarında değiştirilmesidir. Engellerin ve uygun gücün varlığını manipüle ederek bu yöntem, denge geri kazanımıile ilgili olarak karar verme (yani, eylem seçimi) ve yanıt inhibisyonu gibi bilişsel süreçleri vurgular.
Önerilen yöntem dengenin nöral kontrolüne benzersiz bir bakış sağlama potansiyeline sahiptir ancak belirli sınırlamalar oluşturur. Örneğin, yalın ve serbest bırakma yöntemini kullanırken, kablo salınımı, diğer dış postural pertürbasyon yöntemleriile karşılaştırıldığında belirgin bir denge kurtarma adımı gerektiren bir ileri yalından başlatılır10. Ayrıca, yön ve tedirginlik büyüklüğü tahmin edilebilir, normalde daha gerçekçi sonbahar senaryoları meşgul olmaz kasların beklentisiyle aktivasyonuyol açabilir. Son olarak, görme geçici olarak kablo sürümünden önce tıkanır, bu da bireyin günlük deneyiminden sapıyor. Bu özellikler dengeyi biraz yapay hale getirir ve farklı tedirginlik biçimleri arasında genelleştirilmesine engel olabilir. Dengenin belirli bir değerlendirme yönteminden nasıl kontrol edildiğinde gerçek dünyaya genellenebilirliğin her zaman bir endişe kaynağı olduğunu kabul etmek önemlidir. Nitekim, denge yeteneği için yaygın olarak tanınan kapsamlı bir test şu anda4yok. Mevcut amaçlar için, bir set ileri düşüş genellikle ihmal veya geleneksel denge değerlendirmeleri erişilemez belirli bilişsel talepleri manipüle ederken tedirginlik özellikleri ve yanıt ayarları sabit tutulmasını sağlar. Bu tür deneysel kontrol yararlıdır ancak sonuçları yorumlarken dikkate alınmalıdır.
İkinci bir sınırlama olarak, test ekipmanlarının inşası ve gerekli mühendislik becerileri bu yöntemi uygulamak için bir meydan okuma temsil edebilir. Utah State Üniversitesi'nden üç elektrik mühendisliği öğrencisi platformu inşa etti, elektronik cihazları kurdu ve kol kapağı ve bacak bloğu için servo motorları kullanmak için mikrodenetleyicileri programladı. İnşaat maliyetleri mütevazıydı (platforma monte edilen kuvvet plakaları hariç 15.000 $). Yine de, bu mevcut kaynaklara bağlı olarak bir sorun teşkil edebilir.
Bu yaklaşım la dengenin nöral kontrolüne ilişkin özel bilgiler elde edilebildi. Bu örnekler, noninvaziv beyin stimülasyonunun, nesneleri postural bir bağlamda görüntülemeye dayalı olarak motor seti yakalamak için kullanılabileceğini ve kas yanıtlarını kullanarak yanıt inhibisyonunu değerlendirmek için bir teknik sunduğunu göstermektedir. Özellikle, modifiye yalın ve serbest bırakma tekniği kolayca elektroensefalografi ve fonksiyonel yakın kızılötesi spektroskopi gibi diğer nörofizyolojik problar dahil adapte edilebilir. Doğrudan nöral önlemlerin dahil edilmeden bile, tamamen dış güçlere odaklanan çalışma tasarımları, kas aktivasyonu ve kinematik bilişsel açıkların davranışsal belirteçleri hakkında önemli bir içgörü sağlayabilir. Örneğin, bir reaktif atlama görevi sırasında beklentili postural vardiya yakalamak için kuvvet plakaları kullanmak için ilginç bir uygulama Cohen ve ark.26tarafından gösterilmiştir. Çalışmalarında, yaşlı erişkinlerde yanıt inhibisyonu açıkları uygunsuz ağırlık kayması ile ortaya çıktı, hangi sırayla seçim-reaksiyon adım süreleri gecikmelere yol açtı. Böyle bir yaklaşım ağırlık kayması ve atlama hataları hassas önlemler kazanmak için mevcut paradigma uygulanabilir.
Bu yeni yöntem, katılımcıların desteklenen bir yalından serbest bırakıldığı yerleşik bir reaktif denge testinden oluşturulur ve şimdi davranışsal esneklik gerektiren senaryolar içerir. Yanıt inhibisyonu ve eylem seçimini ortaya çıkarmak için uygun test tasarımları, bilişsel psikolojiden denge kontrolü alanına kadar kavramları uygulamanın bir yolunu sağlar. Böyle bir yaklaşım bilişsel gerileme ve düşme yaygınlığı ilişkili olduğunu tanıma üzerine inşa etmek için gereklidir, ve bilişsel kaynakların düşmesini önlemek için nasıl bir mekanistik anlayış kazanmak için. Muhtemelen bu kurulum sadece bir araştırma aracı olarak değil, aynı zamanda denge bilişsel rolleri eğitmek için bir araç olarak kullanılabilir. Devam eden çalışmaların önemli bir amacı, beynin çevreye verilen bir düşüşü önlemek için hangi hareketin en uygun olacağını güncellemek için bağlamsal bilgileri nasıl kullandığını anlamaktır. Sabit bir el tutma veya potansiyel bir adım bariyerdurumu gibi ipuçları, ihtiyaç ortaya çıkması halinde hangi yanıtı yapmak için kılavuz olabilir ve öngörücü beyin süreçlerini gizlice şekillendirebilir16. Özellikle, inhibitör girişim kontrolü veya görsel-uzamsal bellek gibi zihinsel yetenekler gerekli olduğunda, bu bilgileri uygun şekilde kullanma kapasitesi yaşla birlikte bozulabilir. Bilişsel gerileme ve1-3düşme arasındaki ilişki göz önüne alındığında, bağlamsal alaka entegre için bir ihtiyaç vurgulamak çalışma tasarımları uygulanması birçok savunmasız popülasyonlarda denge açıkları içine değerli bir fikir sağlayabilir.
Açıklamalar
Yazarların açıklayacak bir şeyi yok.
Teşekkürler
Bu yayında bildirilen araştırma, R21AG061688 Ödül Numarası altında Ulusal Sağlık Enstitüleri Yaşlanma Ulusal Enstitüsü tarafından desteklenmiştir. İçerik sadece yazarların sorumluluğundadır ve Ulusal Sağlık Enstitüleri'nin resmi görüşlerini temsil etmek zorunda değildir.
Malzemeler
| Name | Company | Catalog Number | Comments |
| CED Power1401 | Cambridge Electronic Design | Data acquisition interface | |
| Delsys Bagnoli-4 amplifier | Delsys | EMG equipment | |
| Figure-eight D702 Coil | Magstim Company Ltd | TMS coil | |
| Kistler Force Plates | Kistler Instrument Corp. | Multicomponent Force Plate Type 9260AA | Force plates |
| Magstim 200 stimulator | Magstim Company Ltd | TMS stimulation units | |
| PLATO occlusion spectacles | Translucent Technologies Inc | visual occlusion | |
| Signal software | Cambridge Electronic Design | Version 7 |
Referanslar
- Mirelman, A., et al. Executive function and falls in older adults: new findings from a five-year prospective study link fall risk to cognition. PloS one. 7 (6), 40297 (2012).
- Herman, T., Mirelman, A., Giladi, N., Schweiger, A., Hausdorff, J. M. Executive control deficits as a prodrome to falls in healthy older adults: a prospective study linking thinking, walking, and falling. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 65 (10), 1086-1092 (2010).
- Saverino, A., Waller, D., Rantell, K., Parry, R., Moriarty, A., Playford, E. D. The Role of Cognitive Factors in Predicting Balance and Fall Risk in a Neuro-Rehabilitation Setting. PLOS ONE. 11 (4), 0153469 (2016).
- Rogers, M. W., Mille, M. -. L. Chapter 5 - Balance perturbations. Handbook of Clinical Neurology. 159, 85-105 (2018).
- Adkin, A. L., Campbell, A. D., Chua, R., Carpenter, M. G. The influence of postural threat on the cortical response to unpredictable and predictable postural perturbations. Neuroscience Letters. 435 (2), 120-125 (2008).
- Marlin, A., Mochizuki, G., Staines, W. R., McIlroy, W. E. Localizing evoked cortical activity associated with balance reactions: does the anterior cingulate play a role. Journal of Neurophysiology. 111 (12), 2634-2643 (2014).
- Horak, F. B., Nashner, L. M. Central programming of postural movements: adaptation to altered support-surface configurations. Journal of Neurophysiology. 55 (6), 1369-1381 (1986).
- Nashner, L. M. Fixed patterns of rapid postural responses among leg muscles during stance. Experimental Brain Research. 30 (1), 13-24 (1977).
- Varghese, J. P., Marlin, A., Beyer, K. B., Staines, W. R., Mochizuki, G., McIlroy, W. E. Frequency characteristics of cortical activity associated with perturbations to upright stability. Neuroscience Letters. 578, 33-38 (2014).
- Mansfield, A., Maki, B. E. Are age-related impairments in change-in-support balance reactions dependent on the method of balance perturbation. Journal of Biomechanics. 42 (8), 1023-1031 (2009).
- Maki, B. E., McIlroy, W. E. The role of limb movements in maintaining upright stance: the "change-in-support" strategy. Physical Therapy. 77 (5), 488-507 (1997).
- Lakhani, B., Mansfield, A., Inness, E. L., McIlroy, W. E. Characterizing the determinants of limb preference for compensatory stepping in healthy young adults. Gait & Posture. 33 (2), 200-204 (2011).
- Mansfield, A., et al. Training rapid stepping responses in an individual with stroke. Physical Therapy. 91 (6), 958-969 (2011).
- Mansfield, A., Inness, E. L., Lakhani, B., McIlroy, W. E. Determinants of limb preference for initiating compensatory stepping poststroke. Archives of Physical Medicine and Rehabilitation. 93 (7), 1179-1184 (2012).
- Cheng, K. C., Pratt, J., Maki, B. E. Effects of spatial-memory decay and dual-task interference on perturbation-evoked reach-to-grasp reactions in the absence of online visual feedback. Human Movement Science. 32 (2), 328-342 (2013).
- Dakin, C. J., Bolton, D. A. E. Forecast or Fall: Prediction's Importance to Postural Control. Frontiers in Neurology. 9, 924 (2018).
- Slobounov, S., Cao, C., Jaiswal, N., Newell, K. M. Neural basis of postural instability identified by VTC and EEG. Experimental Brain Research. 199 (1), 1-16 (2009).
- Maki, B. E., McIlroy, W. E. Cognitive demands and cortical control of human balance-recovery reactions. Journal of Neural Transmission. 114 (10), 1279-1296 (2007).
- Bolton, D. A. The role of the cerebral cortex in postural responses to externally induced perturbations. Neuroscience and Biobehavioral Reviews. 57, 142-155 (2015).
- Rossi, S., Hallett, M., Rossini, P. M., Pascual-Leone, A. Safety of TMS Consensus Group Safety, ethical considerations, and application guidelines for the use of transcranial magnetic stimulation in clinical practice and research. Clinical Neurophysiology: official journal of the International Federation of Clinical Neurophysiology. 120 (12), 2008-2039 (2009).
- Bolton, D. A. E., et al. Motor preparation for compensatory reach-to-grasp responses when viewing a wall-mounted safety handle. Cortex. 117, 135-146 (2019).
- Goode, C., Cole, D. M., Bolton, D. A. E. Staying upright by shutting down? Evidence for global suppression of the motor system when recovering balance. Gait & Posture. 70, 260-263 (2019).
- Rydalch, G., Bell, H. B., Ruddy, K. L., Bolton, D. A. E. Stop-signal reaction time correlates with a compensatory balance response. Gait & Posture. 71, 273-278 (2019).
- Gibson, J. J. . The Ecological Approach To Visual Perception. , (1979).
- Majid, D. S. A., Cai, W., George, J. S., Verbruggen, F., Aron, A. R. Transcranial Magnetic Stimulation Reveals Dissociable Mechanisms for Global Versus Selective Corticomotor Suppression Underlying the Stopping of Action. Cerebral Cortex. 22 (2), 363-371 (2012).
- Cohen, R. G., Nutt, J. G., Horak, F. B. Errors in postural preparation lead to increased choice reaction times for step initiation in older adults. The Journals of Gerontology. Series A, Biological Sciences and Medical Sciences. 66 (6), 705-713 (2011).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiDaha Fazla Makale Keşfet
This article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır