
Method Article
创新竞技场:一种跨群体比较创新问题解决方法的方法
摘要
创新竞技场是一种研究动物每次时间单位技术创新率的新型比较方法。它由20个不同的问题解决任务组成,这些任务同时呈现。创新可以自由进行,并且该设置在个体,种群或物种水平的易感性方面是稳健的。
摘要
解决问题的任务通常用于研究技术,创新行为,但在广泛的物种中比较这种能力是一项具有挑战性的工作。特定的易感性,例如物种的形态学工具包或勘探技术,可以极大地影响此类任务的性能,这使得直接比较变得困难。这里介绍的方法被开发为在这种物种特定的差异方面更加稳健:创新竞技场提出了20种不同的解决问题的任务。所有任务同时呈现。受试者反复面对该设备,这可以测量随着时间的推移出现的创新 - 这是研究动物如何通过创新行为适应不断变化的环境条件的重要下一步。
每个人都用该设备进行测试,直到它停止发现解决方案。测试结束后,我们分析了视频记录,并对奖励和多种设备导向行为的成功检索进行了编码。后者使用主成分分析进行分析,然后将所得成分与会话数和感兴趣的组比较一起包含在广义线性混合模型中,以预测成功概率。
我们在第一项研究中使用了这种方法,以长期圈养是否会影响以其创新行为而闻名的鹦鹉物种的问题解决能力:Goffin's cockatoo。我们发现动机程度有影响,但短期和长期俘虏群体之间解决问题的能力没有差异。
引言
一只大山雀(Parus major)面对着一个牛奶瓶,但它不能直接进入牛奶,因为瓶子被铝箔封闭。它通过啄过铝箔找到解决这个问题的方法,这样它就可以喝奶油了。这种情况描述了最广为人知的动物创新例子之一1。
解决此类问题可能是有利的,尤其是在经常变化的环境中。Kummer和Goodall2 将创新广义地定义为"找到新问题的解决方案,或为旧问题找到新颖的解决方案"。Tebbich及其同事3 对创新的更详细定义是"发现与社会或物理环境的新行为互动,利用现有机会和/或创造新机会"。
见证自发的创新需要彻底和耗时的观察,这在包括各种物种的框架内通常是不可行的。为了应对这一挑战,研究人员进行了严格的文献综述,以估计创新率4,5 ,并揭示了创新倾向与其他因素(如神经学措施6,7,8 和喂养生态学9,10,11)之间的相关性。.然而,实验测试可以在受控环境中引发创新行为。出于这个原因,技术问题解决任务中的表现通常被用作动物创新能力的代理(见12中的综述)。
已经使用了各种不同的方法来研究创新的解决问题的方法:例如,可以根据它们在特定任务上的表现来比较不同的动物群体。这些研究通常针对特定的创新或认知能力(例如,钩弯曲行为;见13,14,15)。这使得研究人员能够在特定的背景下获得详细信息,但对任何相似性或差异的解释都受到任务性质的限制,这可能需要来自不同群体的不同创新能力(如13,14中所述)。
其他研究已经实施了一系列连续的任务16,17。通过这种方法,可以比较多个任务的性能并估计特定领域内的整体能力。然而,这种研究的局限性在于连续提出不同的任务,这不允许对随着时间的推移而出现的创新进行调查。
另一种方法是同时提供不同的选择来获得单一奖励。这通常是通过使用多接入盒(MAB)18,19,20,21,22,23,24,25,26来实现的,其中一个奖励放置在拼图盒的中心,可以通过四种不同的解决方案进行检索。一旦一致地使用相同的解决方案,它就会被阻止,动物需要切换到另一个解决方案才能获得奖励。通过这样的实验,可以检测和解释物种之间和物种内部的偏好,但它仍然将创新行为的表达限制在每次试验的一个解决方案18,19,20,21。在其他研究中,动物还被介绍过同时包含多种溶液的装置,每种溶液都有单独的奖励。这允许在一次试验中进行多项创新,但到目前为止,任务在很大程度上仅限于一些运动上不同的解决方案。鉴于它不是这些研究的重点,实验设置不涉及重复暴露于该装置,这将允许测量每个时间单位27,28,29的创新率。
在这里,我们提出了一种方法,除了其他方法之外,还可以帮助我们比较不同物种的创新解决问题的能力。我们在单个设置中开发了更广泛的任务,预计每个组或物种的难度会有所不同。因此,特定任务的差异不太可能影响找到解决方案的总体概率。此外,我们同时和反复地呈现所有任务,以衡量创新随时间推移的出现。这项措施有可能增强我们对创新行为适应性价值的理解。
使用这种方法的第一项研究调查了长期圈养是否影响了Goffin's cockatoo(Cacatua goffiniana;以下简称:Goffins)的解决问题的能力(如所谓的圈养效应所暗示的那样;见30),Goffin's cockatoo (Cacatua goffiniana;以下简称:Goffins),这是一种具有技术创新性的鸟类模型物种(在31中进行了审查)。
研究方案
这项研究由维也纳兽医大学伦理与动物福利委员会根据良好的科学实践指南和国家立法批准。该实验纯粹是开胃菜,严格非侵入性,因此根据奥地利动物实验法(TVG 2012)被归类为非动物实验。在印度尼西亚进行的实验部分由研究,技术和高等教育部(RISTEK)根据外国研究人员许可协调小组(10 / TKPIPA / E5 / Dit.KI / X / 2016)的会议批准,该小组将进行这项研究的许可授予M.O.(410 / SIP / FRP / E5 / Dit.KI / XII / 2016)和B.M(411 / SIP / FRP / E5 / Dit.KI / XII / 2016)。
1. 前提条件/先决条件
- 基本
- 确保可以单独识别受试者。研究物种可能具有不同的个体模式或个体可以被标记(例如,用色环或无毒油漆)。
注意:有关振铃以及捕获和释放野生戈芬的更多信息,请参阅32补充信息中的捕获释放程序。 - 确保有一个视觉遮挡的房间可用于测试,以避免受试者之间的社交学习。
- 通过测试多种不同的可用零食,为研究物种和组确定高度优选的奖励(参见参考文献32 的补充信息中的33或食物偏好测试)。
- 考虑各组之间的喂养时间是否有很大差异。如果是这样,请考虑使用一种协议,确保进纸时间不会大大减少可用于解决其中一个组的任务的时间(有关详细信息,请参阅步骤 4.8)。
注意:在这项研究中,长期圈养组偏爱腰果,短期圈养组偏爱干玉米。
- 确保可以单独识别受试者。研究物种可能具有不同的个体模式或个体可以被标记(例如,用色环或无毒油漆)。
- 设计创新竞技场
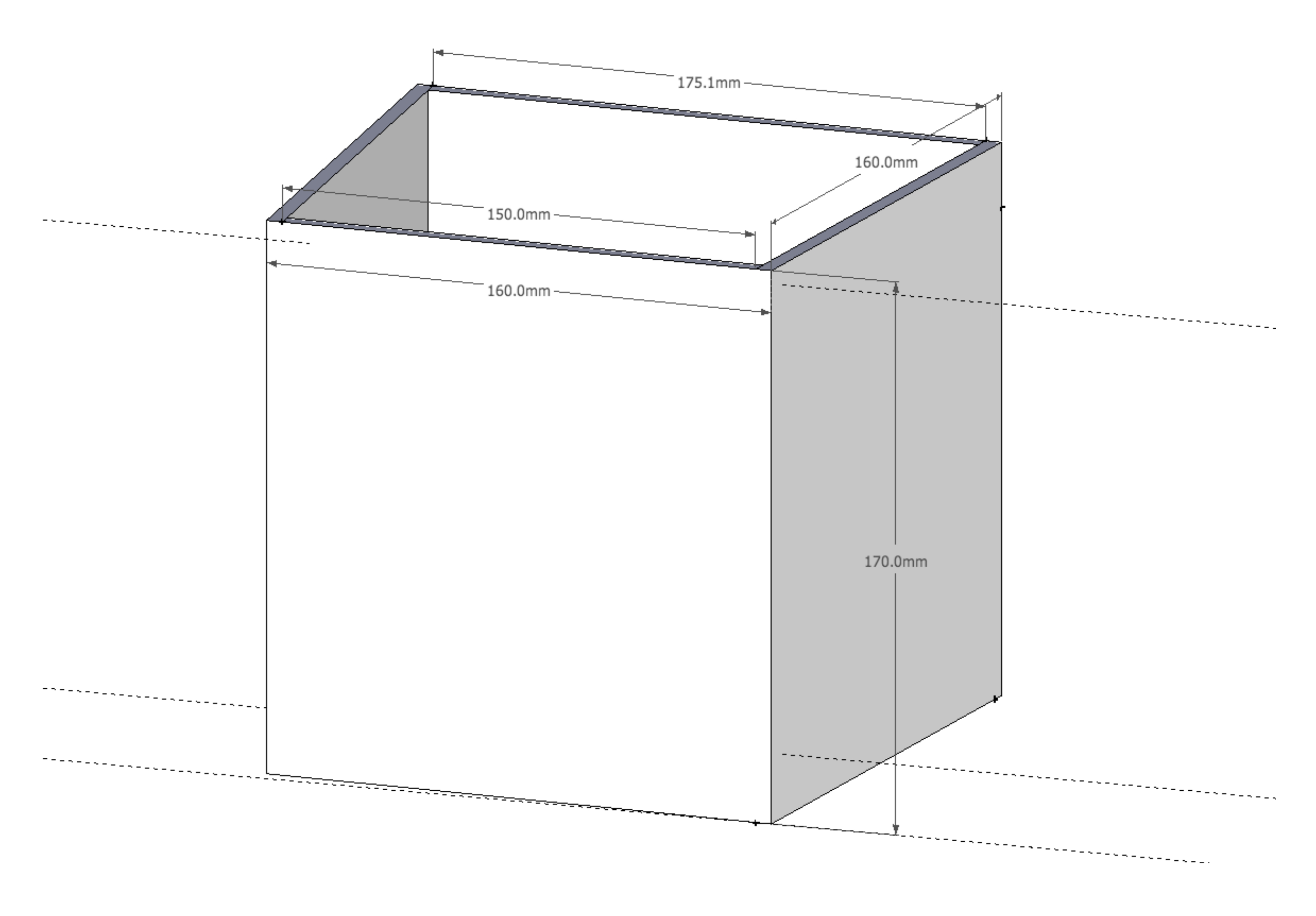
注意:完整的设备,即创新竞技场,由20个不同的拼图盒组成,在木制平台上以半圆形排列。- 以适用于研究物种的大小设计框的基本轮廓。使用具有梯形形状(便于在半圆形中对齐),可拆卸盖子(允许在会话之间诱饵)和可拆卸底座的透明盒子(见 图1)。
注意:每个底座稍后将保持在永久位置,而其余的盒子将改变位置。在所介绍的研究中,选择了盒子的大小,以确保鹦鹉可以轻松访问每个拼图。可以为每个研究物种调整尺寸。 - 设计一个平台来容纳20个拼图盒。
- 设计一个固定系统,该系统将在测试期间将盒子的盖子保持在适当的位置,因此在测试过程中不能被受试者取下。
注意:它必须从设备上拆卸,因为需要取下盒子的盖子进行诱饵。 - 对于每个盒子的正面,设计20个不同的任务,每个任务将构成不同的技术挑战(见 图2)。
注意:本实验的任务旨在使溶液属于许多不同物种的形态学范围。为了比较优势,最好使用尽可能相似的任务,但请记住,任务对受试者来说是新颖的,这一点更为重要。有关精确测量,请参阅 材料表 ,有关任务的更详细说明,请参阅 补充技术图纸 。 - 获取设备所需的所有材料。
- 确保拥有广角相机,编码软件(推荐,例如,行为观察研究交互式软件,BORIS34)和用于统计分析的软件(推荐,例如,R35)。
注意:对于实地研究,理想情况下,在前往研究地点之前设计竞技场,并尽可能多地携带基本设备,例如预切割的丙烯酸玻璃。
- 以适用于研究物种的大小设计框的基本轮廓。使用具有梯形形状(便于在半圆形中对齐),可拆卸盖子(允许在会话之间诱饵)和可拆卸底座的透明盒子(见 图1)。

图 1:基本三面框的示意图。请单击此处查看此图的大图。
{kind=link}

图2:创新竞技场的任务 ,并相应地描述了解决任务所需的机动动作( =奖励;红色箭头表示解决任务所需的行动方向;黄色箭头表示奖励轨迹)。任务根据其平均难度(从左到右,从上到下)进行安排。之前发表于32. 请点击此处查看此图的大图。
=奖励;红色箭头表示解决任务所需的行动方向;黄色箭头表示奖励轨迹)。任务根据其平均难度(从左到右,从上到下)进行安排。之前发表于32. 请点击此处查看此图的大图。
{kind=link}
2. 准备工作
- 将盒子的三个侧面粘合在一起:左侧,背面和右侧,但不是正面,顶部和底部。
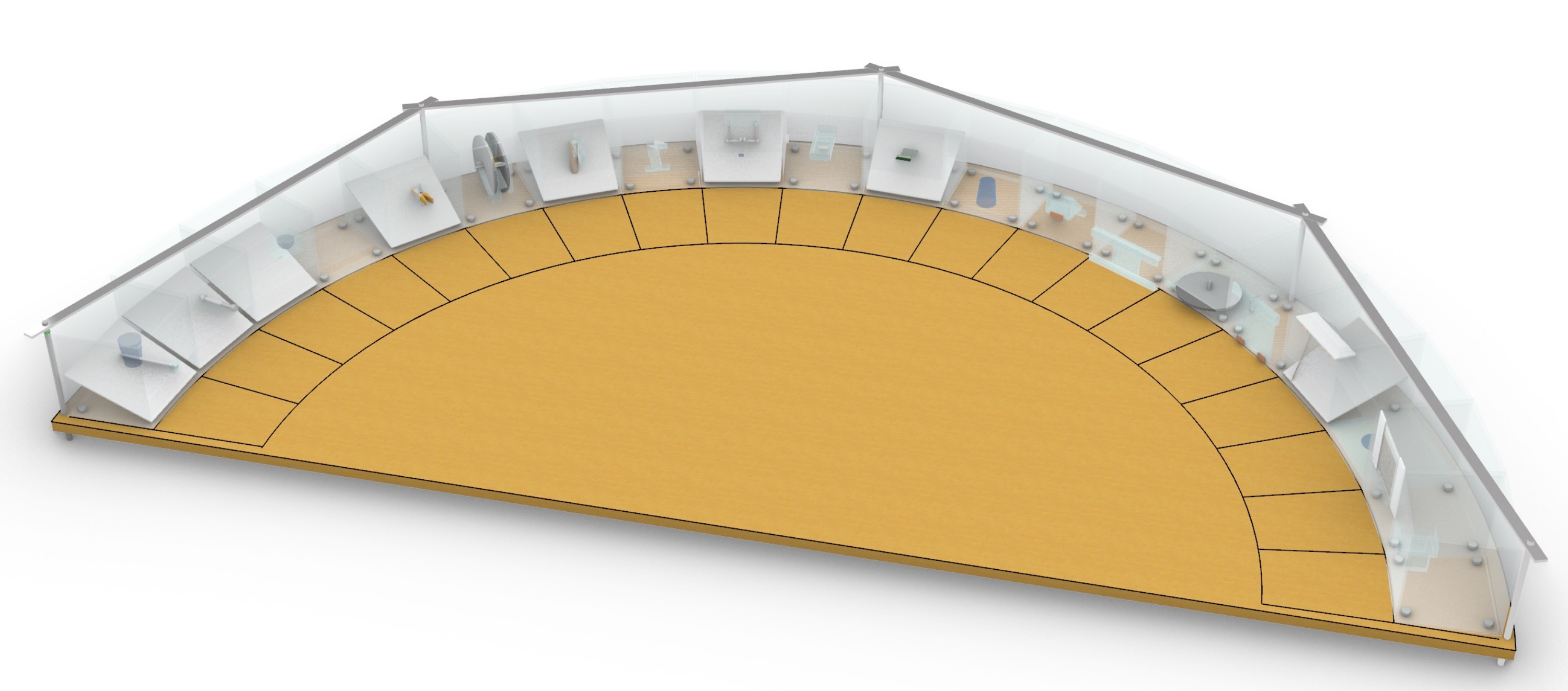
- 将每个三面框放在每个底座的顶部,并在平台上将它们均匀地对齐成半圆(图3)。每个盒子的前部应位于离中心1米处。
注意:构成任务的机制(盒子的正面和可能的内容)将在实验的稍后时间点添加。 - 从每个盒子向竞技场中心方向绘制一条20厘米的线,并连接这些线,从而形成一个接近网格(图3)。
注意:根据研究物种的大小,不同的距离可能更合适。对于这里介绍的研究,选择了20厘米,因为它大约是Goffin的长度(不包括尾羽)。 - 卸下除盒子底座之外的所有东西,并将它们永久地连接到平台上。这将确保盒子在实验过程中保持在原位。
- 在竞技场上方的天花板上安装广角摄像机。
- 为每个会话和主题的每个盒子的位置准备一个时间表。每个主题将始终面对所有盒子,但每个会话都有新的安排。每个任务的位置(位置1到20)应随机分配,但限制每个主题在同一位置没有框两次。
注意:这是理想情况。如果无法计划受试者的测试顺序(这在实地研究中更有可能),那么在会话之间(但不在受试者内)的这种随机化限制(在同一位置两次没有框)必须足够。

图 3:创新竞技场。 任务安排在半圆中;20个任务的位置是可交换的。邻近网格(每个框前面 20 厘米)标记为黑色。 请点击此处查看此图的大图。
{kind=link}
3. 习惯化
注意:习惯化的目的是减少新恐惧反应对竞技场的影响。通过要求每个人达到两个标准的习惯化程序,确保所有受试者的最低习惯化水平。
- 习惯于非功能性领域(直到标准I)
- 将所有三面盒放在底座上,添加每个盒子的盖子,并用固定系统将它们固定到位(没有受试者在场)。
注意:考虑在适合每个物种的阶段中习惯受试者,例如,通过逐步向平台添加更多的盒子,在他们的家庭区域展示竞技场,在平台的任何位置放置奖励,例如周围,顶部和盒子,或者首先在更大的组中与他们对抗设备,并逐渐最小化组大小。 - 让受试者熟悉可能引发新恐惧症反应的任务的不同元素。
注意:这些单独的元素(即,除基本盒子,平台和固定系统之外的所有元素)在此阶段不得组合成功能机制。 - 在盒子内放置一个奖励(中心)。将受试者带入隔间。
- 等待会话的长度而不会造成干扰。受试者现在应该吃掉奖励。
注意:这些习惯性训练的持续时间在实验中有所不同:长期圈养的鸟接受10分钟,而短期圈养的凤头鹦鹉有20分钟的时间来吃奖励。这是必要的,因为奖励类型不同,喂养时间大大延长。此问题在稍后的测试会话中以不同的方式得到解决(请参阅步骤 4.8)。 - 对每个科目重复(每个测试日一次),直到达到标准:每个人在连续三个会话中消耗三面盒子(每个盒子一个奖励)中的所有奖励,同时在视觉上与小组隔离。
- 将所有三面盒放在底座上,添加每个盒子的盖子,并用固定系统将它们固定到位(没有受试者在场)。
- 适应功能领域(直到标准II)
- 粘合并永久地将所有必要的元素附加到盒子上,使它们成为功能性的拼图盒。
注意:此时,竞技场的功能与测试会话相同。 - 将盒子随机放在平台上(它们将由底座保持在适当的位置),并将盖子固定在盒子上。
- 在最靠近竞技场中心边缘的每个盒子的盖子上放置一个奖励。
- 将受试者带入隔间。
- 等待会话的长度而不会造成干扰。
注意:受试者现在应该吃掉奖励。 - 对每个科目重复(每个测试日一个会话),直到达到标准。
注意:标准II:个人在一次会话中消耗功能性拼图盒顶部的所有奖励(每个框一个奖励),同时在视觉上与组隔离。该标准II将确保受试者不害怕竞技场,即使附加了新部件。然而,它们不应与这些机制相互作用,如果它们这样做,就应被打断。
- 粘合并永久地将所有必要的元素附加到盒子上,使它们成为功能性的拼图盒。
4. 测试
- 根据随机化计划将盒子放在平台上。
- 将每个任务放在框内的适当位置(请参阅 图 2)。
注意:每个奖励的确切位置取决于具体任务,可以在视频中看到。 - 将盖子固定在盒子上,并用固定系统固定(以确保受试者无法将其拉下)。
- 将一个单独的受试者分开,并将其带入测试室。科目一次测试一个,以避免社会学习的干扰。
- 要么将它们放在起始位置(即,与平台中心的所有任务相等距离的点),要么在起始位置放置激励(例如,奖励),以确保主体从那里开始。
- 启动计时器并等待20分钟(会话持续时间),而不会干扰或与主体交互。主题可以解决尽可能多的任务。
- 如果受试者被非设备相关的物体分散注意力,实验者可以将它们放回竞技场的起始位置(如果可能的话)。
- 如果受试者在奖励上喂食时间超过3秒,请停止计时器,等到喂食完成,然后恢复计时。
注意:这样做是为了确保可用于解决任务的最长时间不会因进纸时间而减少,因此对于两组而言相等。 - 如果受试者在前3分钟内没有与任何任务互动,也没有被激动,请应用动机方案(见第5节)。
- 一旦20分钟过去了(一个会话的最长持续时间)或参与者解决了所有任务,受试者就完成了当天的测试,并且可以被释放回家庭区域。
- 在下一个测试日,重复此过程。
- 继续测试每个人,直到它在过去五个会话中没有解决任何新任务,或者在连续10个会话中根本没有解决任何任务。
5. 激励协议
注意:如上所述(步骤4.9),如果个人在会话的前3分钟内不与任何任务进行交互,则可以实施激励协议。
- 在方框顶部放置三个奖励(为此,请在左侧,中间和右侧选择一个框)。如果受试者在消耗奖励后3分钟开始与任何任务互动,请恢复会话(20分钟的持续时间从此时开始)。
- 如果没有,则将五个奖励分散在接近线上(即接近网格)。如果受试者在消耗奖励后3分钟开始与任何任务互动,请恢复会话(20分钟的持续时间从此时开始)。
- 如果没有,请在起始位置放置五个奖励。如果受试者在消耗奖励后3分钟开始与任何任务互动,请恢复会话(20分钟时间范围从此时开始)。
- 如果没有,请在开始位置放置一些奖励并终止这一天的测试会话(但给受试者一些时间来消耗奖励)。
6. 分析
- 行为编码
- 在分析视频之前,请详细检查编码协议(表1),并考虑是否需要对被测物种进行调整。
注意:编码变量的描述应尽可能具体,以避免不同研究人员之间的编码差异。 - 注释点事件:接触的不同任务的数量(任务触摸;请注意,接触的最大任务数为 20)、已解决的任务数(已解决的任务数)、与诱饵任务的联系(诱饵联系)以及与已解决的任务的联系(已解决的接触)。
- 注释延迟的持续时间,直到主题穿过网格线的外部边界 (LatencyGrid) 和网格内花费的时间 (GridTime)。
- 在分析视频之前,请详细检查编码协议(表1),并考虑是否需要对被测物种进行调整。
- 统计分析
- 确定设备导向行为(LatencyGrid、GridTime、TasksTouched、BaitedContact、SolvedContact)的度量值是否相关。
- 如果是,则使用主成分分析提取主成分,然后再将其作为预测变量包含在模型中。
- 如果它们不相关,请将它们作为预测变量单独包含在模型中。
- 运行具有二项式误差结构和logit链接函数36的广义线性混合模型。为了预测成功的概率(即响应变量被SolvedTasks),请用最大随机斜率结构拟合模型,并包括主题,任务,主题和会话的组合因子(SessionID)以及主题和任务的组合因子(Subj.Task)的随机截获,以避免伪复制。使用感兴趣值(例如,物种)和主成分的比较作为会话的预测变量和控制。考虑可能的相互作用。
- 为了避免隐晦的多重检验37 ,在测试单个预测因子之前,首先将模型与缺少所有固定感兴趣效应的模型进行比较。
- 要测试组之间任务难度的总体差异,请将(完整)模型与任务中缺少组随机斜率的模型进行比较。
结果
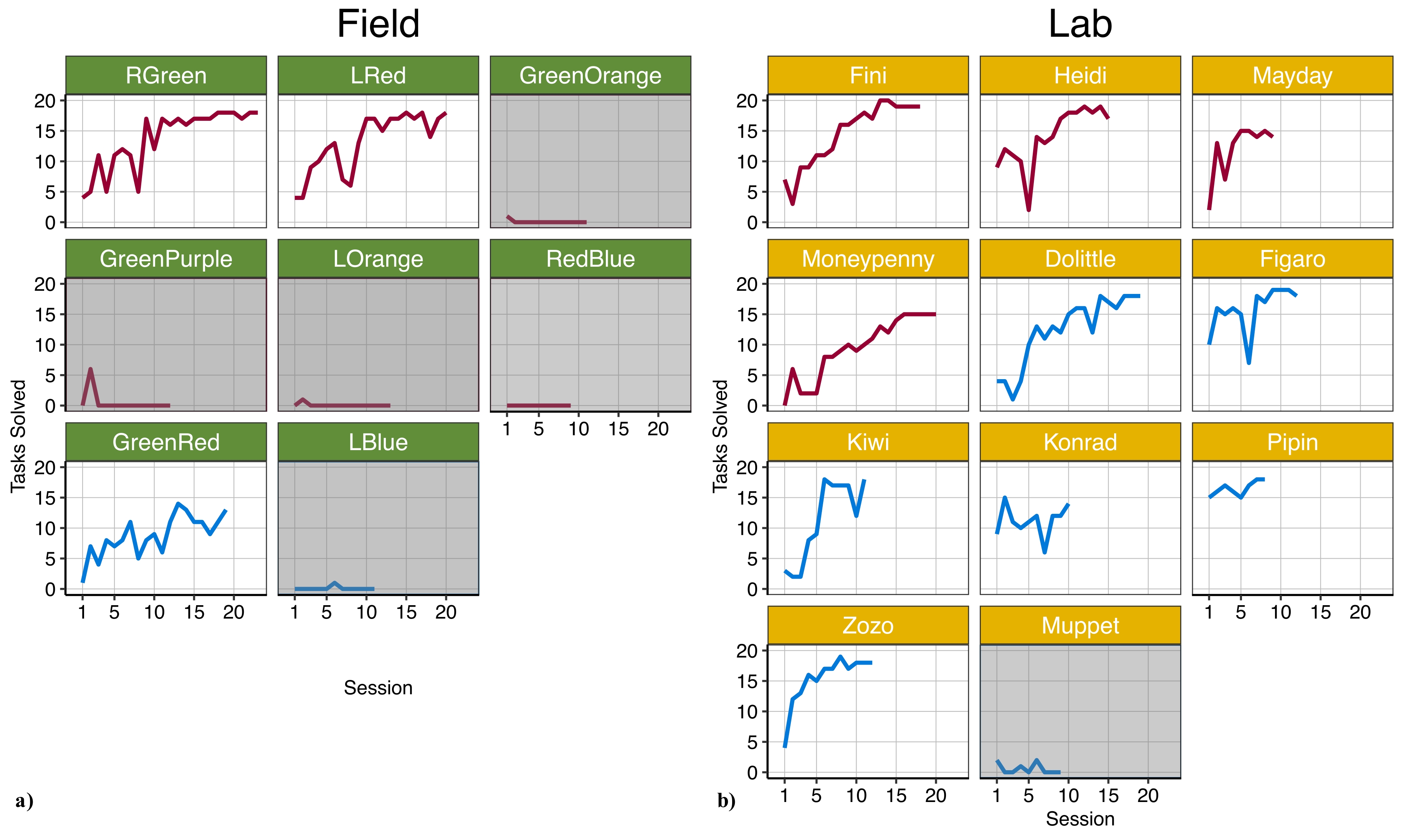
使用创新竞技场测试了19名受试者:11只长期和8只短期圈养凤头鹦鹉(图4)。

图 4:每个人每个会话解决的任务数概览。 a) 现场组,b) 实验室组。红线 = 女性;蓝线 = 男性。由于不愿意与设备互动而接受激励协议的受试者被归类为无动机,并以灰色背景描绘。曾发表于《补充资料》第32条。 请点击此处查看此图的大图。
{kind=link}
主成分分析导致两个分量的特征值高于凯撒标准38 (PCA输出见 表2 )。PC1 加载与任务接触的频率、在任务附近(即网格内)花费的时间以及接触的任务数。PC2受到与已解决任务的接触数量的积极影响,与接触但未解决的任务数量产生负面影响。这种以任务为导向的行为经常用于衡量动机(参见12 的评论)。因此,我们使用PC1和PC2作为定量测量,以激励与模型中的设备进行交互。他们共同解释了设备导向行为中76.7%的方差,并且两者以及会话都显着影响了解决任务的概率(PC1:估计= 2.713, SE ±0.588, χ2 = 28.64, p <0.001;PC2: 估计值 = 0.906, SE ± 0.315, χ2 = 9.106, p = 0.003;会话: 估计 = 1.719, SE ± 0.526, χ2 = 6.303, p = 0.001;见 图5;见表4)。

图 5:控制预测变量对求解概率的影响: (a) PC1,(b) PC2,(c) 会话。点表示观测数据,点面积表示每个数据点的观测值,虚线表示模型的拟合值,面积表示模型的置信区间。之前发表于32. 请点击此处查看此图的大图。
{kind=link}
19名受试者中有6名在实验期间接受了激励方案(实验室:11人中有1人;字段:8 个中的 5 个)。这些鸟类的PC1,我们将其归类为无动机,范围在-2.934至-2.2之间,而所有其他有动机的个体都发现了正值(表3)。
使用所提出的方法,我们发现组在解决创新领域的20个技术问题解决任务的概率上没有差异(估计= −0.089, SE ±1.012, χ2 = 0.005, p = 0.945; 图5;固定效应估计数见 表4 ;包括所有鸟类)。
将模型与包含组与会话交互项的模型进行事后比较(估计 = 2.924, SE ± 0.854, χ2 = 14.461, p < 0.001)表明,在较早的会话中,在场组中求解的概率较低,但在较晚的会话中解的概率较低。早期会话中的这种差异可能是由于组域中大量动机较少/没有动机的鸟类(由于在10到13个会话之间连续10个会话中未解决任何任务的规则而停止测试的个人)。
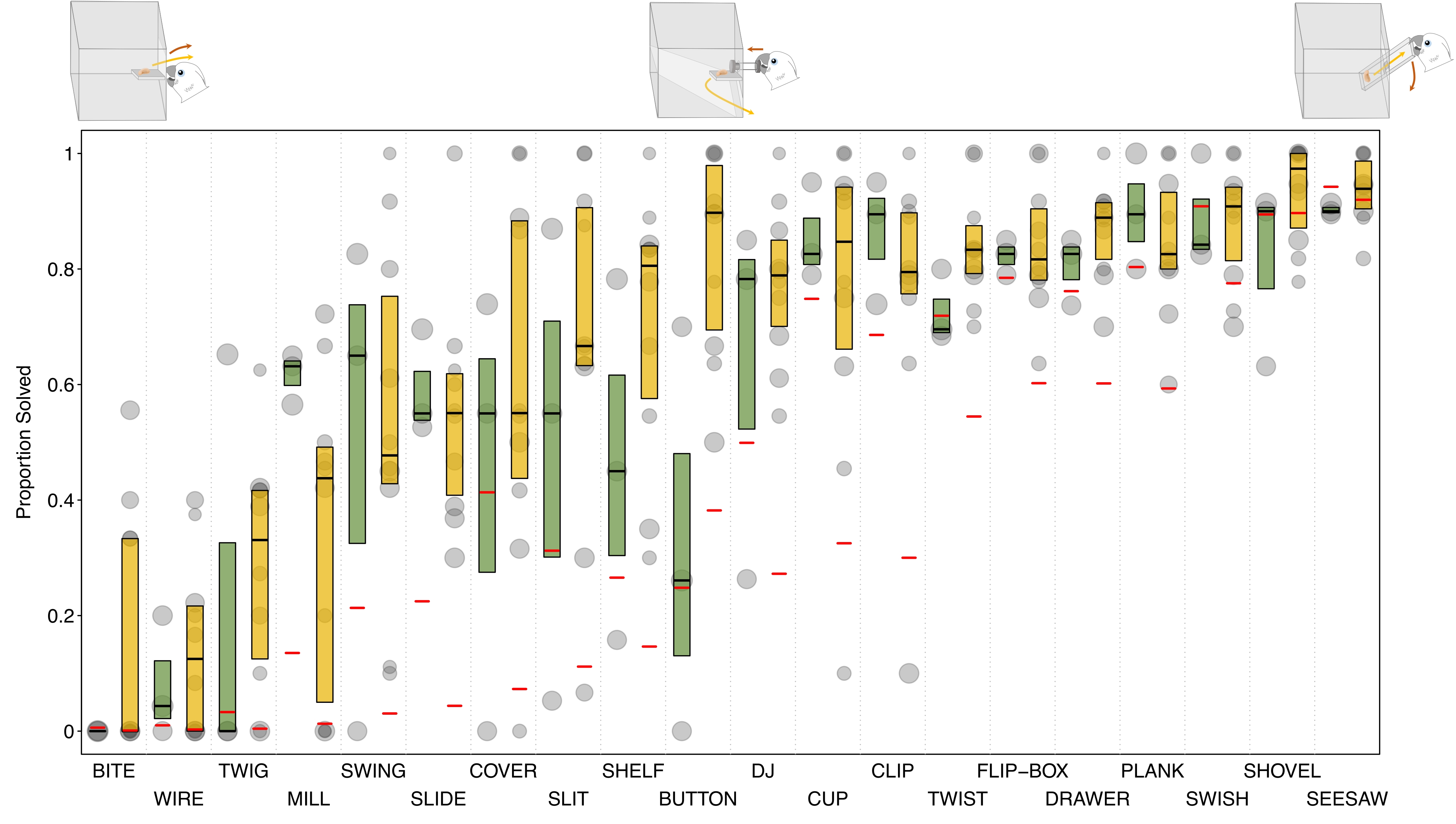
此外,我们发现各组之间在任务的总体难度方面没有差异(将完整模型与包括所有鸟类进行比较,任务内缺少组随机斜率的简化模型:χ2 = 7.589, df = 5, p = 0.18)。然而,对从来不需要动机试验的鸟类的视觉比较,暗示了单个任务的能力存在一些差异(例如,参见 图6中的按钮任务)。

图 6:观察到的有动机受试者的数据以及每个任务和组的模型拟合值: Boxplots 显示了两组每个任务的成功比例(绿色 = 字段;橙色 = 实验室)。粗体水平线表示中值,框从鸟类的第一个四分位数跨越到第三个四分位数。箱线图仅说明来自有动机的鸟类的数据(以提高视觉清晰度)。单个观测值由点表示(面积越大表示每个数据点的观测值越多)。红色水平线显示拟合值。拟合值源自整个数据集。包括咬(左下),按钮(中上)和跷跷板(右上角)任务的插图。之前发表于32. 请点击此处查看此图的大图。
{kind=link}
这些结果证明了即使动物具有不同的经验和生态环境,比较研究方法的可行性。仅使用单个任务(例如Button任务)比较创新解决问题的能力可能会得出一个错误的结论,即长期圈养的鸟类是更好的问题解决者。这种差异可以通过实验室人群在棒插入实验中的经验来解释,而运动动作可能与野生种群的生态相关性不高。当比较不同物种时,这种差异可能会更加明显(见19)。我们进一步测试了动机如何影响解决问题的能力,同时在控制动机的同时比较两组的结果。
因此,创新竞技场的20个技术问题可用于检测特定任务上的群体差异,也可用于估计团队的整体创新能力。在戈芬鹦鹉的情况下,两个群体都可以,即,有能力,获得许多奖励,如果他们愿意,即,有动力与机器互动。
表 1:编码行为协议: 编码行为变量的详细说明。之前发表于32. 请按此下载此表格。
表2:主成分输出: 高于 0.40 的因子载荷以粗体显示。之前发表于32. 请按此下载此表格。
表3:任务导向行为和主成分的主题和值的详细信息: 如果测量负载高于每台 PC 的 0.40,则会出现上标。之前发表于32. 请按此下载此表格。
表4:概率求解模型的固定效应结果。 之前发表于32. 请按此下载此表格。
补充文件:创新竞技场的技术图纸(InnovationArena.3dm)。 尺寸可能会略有偏差。可以加载,例如,在 3dviewer.net,这是一个免费的和开源的3D模型查看器39。 请点击此处下载此文件。
讨论
创新竞技场是一种测试创新技术问题解决能力的新协议。在设计创新竞技场的任务时,我们仔细考虑了在给定一系列物种形态约束的情况下(例如,使用喙,鼻子,爪子,爪子或手)的任务应该是可以解决的。为了使已经测试的物种和将来将要测试的物种之间具有更广泛的可比性,我们鼓励在各自模型中可行的情况下使用这些任务。但是,我们知道某些任务可能需要调整到物种的特定形态极限。最重要的是,任务需要对受试者来说很新颖,这可能需要新的替代设计。创新领域的一个优点是,由于不同任务的数量,即使某些任务需要在将来的研究中进行调整或更改,比较仍然是可能的,并且具有信息量。
在计划研究时,应考虑预测试阶段(例如,设计和构建设备)可能需要相当长的时间。此外,重要的是要使受试者彻底习惯于该装置。不同的群体在探索方法和新生反应方面可以有很大差异40,41,42。消除(或减少)新恐惧反应将使比较更加可靠,并允许确定动机的作用。为了衡量个人随着时间的推移而出现的创新并避免社会学习,对受试者进行反复和单独测试至关重要,这在现场条件下可能具有挑战性。对于许多物种来说,野生捕获的受试者将需要大量的时间来适应新的环境,人类的存在和互动,并制定一个有效的分离程序。此外,实际上可能无法严格遵守每个会话每个人的随机化时间表。虽然我们研究中长期圈养的凤头鹦鹉被训练成在用它们的名字叫到测试室时进入测试室,但我们需要对哪个个体进入现场测试室更加投机取巧。除了动机水平之外,我们还遇到了另一个可能影响使用创新竞技场进行比较研究结果的因素。由于喂养偏好和食物可用性,我们对两组使用了不同的奖励类型,与实验室鸟类相比,这增加了野生凤头鹦鹉的摄食时间。我们通过在个体面对竞技场的总时间中增加喂食持续时间(如果超过3秒)来解释这些差异。该协议确保了与竞技场互动的时间不会因喂食时间而减少。未来的研究应该考虑这个潜在的问题,并可能旨在实施这个已经在习惯化阶段的协议。
这种方法的优势和新颖性包括组合更多种类的任务,同时呈现这些任务,每次与设备相遇时都会获得多个奖励,以及每个主题重复暴露于设备。
此外,对个人进行测试,直到他们不解决任何新任务。与固定数量的会话相比,此最大(或渐近级别)解决方案发现以及每个会话解决的任务数可以提供有关组对不断变化的环境的潜在适应的信息。
替代方法的一个例子是多接入盒(MAB),其中可以通过四种不同的解决方案来解决一个任务,但每次与设备18 相遇只能检索一个奖励,因此随着时间的推移,对创新率的估计是显着限制的。此外,单项任务的困难可能是物种特异性的,可以强烈影响与认知能力方面的表现比较。据我们所知,在以前的研究中,使用运动上不同的解决方案同时呈现任务仅限于最多六个任务(Federspiel,mynah鸟类的6路MAB,迄今为止尚未发表的数据)。虽然人与生物圈计划是发现探索技术的非常有用的工具,但我们认为创新竞技场更适合比较创新本身的能力。范围更广的任务,难度也各不相同,可以更能说明整体技术解决问题的能力29.
在我们的第一项研究中,我们成功地比较了同一物种的两组,即戈芬鹦鹉,它们在经验上有很大不同。通过这种比较,我们专门针对长期囚禁是否会影响解决问题的能力的问题。以前的研究表明,延长的圈养生活方式可以增强这些能力(见30,43),但通过对照实验方法进行直接比较是罕见的(但见44,45)。通过使用创新竞技场,我们能够针对这个问题,发现没有支持对Goffins寻找新解决方案的整体能力的囚禁效应,而是对动机水平32的影响。
此外,创新竞技场可用于解决专注于创新问题解决不同方面的问题。进一步的步骤可包括针对分歧和趋同效果的调查。例如,生态学上不同的密切相关物种(例如,岛屿物种与非岛屿物种)之间的比较,以及远亲物种之间的比较,例如鹦鹉和鸬鹚代表或禽类和灵长类物种,这些物种以前在解决个体物理问题方面表现出相似的表现46。创新竞技场的开发是为了比较许多不同的物种,甚至是那些远亲的物种。
也就是说,这种方法也非常适合用于调查个体间的差异。例如,可以使用性格评分作为预测因子来估计它们对创新率的影响。我们相信所提出的方法可以由研究动物和人类创新的研究小组使用,和/或由专门研究不同物种的实验室合作使用。
披露声明
作者声明没有利益冲突。
致谢
我们感谢Stefan Schierhuber和David Lang协助制作本视频,Christoph Rössler在技术图纸方面的帮助,以及Poppy Lambert校对这份手稿。该出版物由奥地利科学基金会(FWF;START项目Y01309授予A.A.)。所提出的研究由奥地利科学基金(FWF;项目P29075和P29083授予A.A.和项目J 4169-B29授予M.O.)以及维也纳科学技术基金(WWTF;项目CS18-023授予A.A.)资助。
材料
| Name | Company | Catalog Number | Comments |
| wooden platform | Dimensions: wooden semicircle, radius approx. 1.5m | ||
| FIXATION SYSTEM | |||
| 5 x metal nut | Dimensions: M8 | ||
| 5 x rod | (possibly with U-profile) | ||
| 5 x threaded rod | Dimensions: M8; length: 25cm | ||
| 5 x wing nut | Dimensions: M8 | ||
| PUZZLE BOXES WITHOUT FUNCTION PARTS | |||
| 20 x acrylic glass back | Dimensions: 17cm x 17.5cm x 0.5cm | ||
| 20 x acrylic glass base | 4 holes for screws roughly 2cm from each side Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| 20 x acrylic glass front | acrylic glass fronts need to be cut differently for each puzzle box (see drawing) Dimensions: 17cm x 15cm x 0.5cm | ||
| 20 x acrylic glass lid | cut out 0.5cm at the edges for better fit Dimensions: trapezoid shape: 18.5cm x 16cm x 16cm x 1cm (thick) | ||
| 40 x acrylic glass side | Dimensions: 17cm x 16cm x 0.5cm | ||
| 80 x small screw | to attach bases to the platform (4 screws per base) | ||
| PARTS FOR EACH MECHANSIM PER TASK | |||
| to assemble the parts use technical drawing InnovationArena.3dm | can be loaded e.g. in 3dviewer.net, which is a free and open source 3D model viewer. github repository: https://github.com/kovacsv/Online3DViewer; please contact authors if you are in need of a different format | ||
| TASK TWIST | |||
| 5x small nut | to attach glass (punch holes) and acrylic glass cube to threaded rod | ||
| acrylic glass | Dimensions: 2cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5cm; base diameter: 3cm | ||
| thin threaded rod | Dimensions: length: approx. 10cm | ||
| TASK BUTTON | |||
| 2x nut | attach to rod; glue outer nut to rod Dimensions: M8 | ||
| acrylic glass | V-cut to facilitate sliding of rod Dimensions: 4cm x 3cm x 1cm (0.5cm V-cut in the middle) | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| threaded rod | Dimensions: M8, length: 5cm | ||
| TASK SHELF | |||
| acrylic glass top | Dimensions: 5cm x 4cm x 0.3cm | ||
| acrylic glass lower | Dimensions: 5cm x 4cm x 1cm | ||
| acrylic glass side 1 | Dimensions: 4cm x 3cm x 0.5cm | ||
| acrylic glass side 2 | Dimensions: 4.5cm x 3cm x 0.5cm | ||
| thin plastic bucket | one side cut off to fit Dimensions: diameter: approx. 4.5 cm; height: 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| TASK SLIT | room to reach in: 2cm in height | ||
| - | recommended: add small plastic barrier behind reward so it cannot be pushed further into the box | ||
| TASK CLIP | |||
| 2x acrylic glass | Dimensions: 1cm x 1cm x 2cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| peg | Dimensions: length: approx. 6 cm | ||
| thin threaded rod | Dimensions: length: approx. 6 cm | ||
| TASK MILL | |||
| 2x arylic glass triangle | Dimensions: 10cm x 7.5cm x 7.5cm; thickness: 1cm | ||
| 2x plastic disc | Dimensions: diameter: 12cm | ||
| 4x small nut | for attachment | ||
| 7x acrylic glass | Dimensions: 4.5cm x 2cm, 0.5cm | ||
| acrylic glass long | position the mill with longer acrylic glass touching lower half of the front (this way the mill can only turn in one direction) Dimensions: 6.5cm x 2cm, 0.5cm | ||
| thin threaded rod | Dimensions: length: approx. 4cm | ||
| wooden cylinder | Dimensions: diameter: 2cm | ||
| TASK SWISH | |||
| 2x acrylic glass | Dimensions: 2cm x 1cm x 1cm | ||
| 4x small nut | for attachment | ||
| acrylic glass | Dimensions: 10cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin threaded rod | Dimensions: length: approx. 7cm | ||
| wooden cylinder | Dimensions: diameter: 2cm, cut-off slantwise; longest part: 7cm, shortest part: 5cm | ||
| TASK SHOVEL | |||
| acrylic glass | Dimensions: 20cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 7.5cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 5cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SWING | |||
| 4x nut | Dimensions: M8 | ||
| acrylic glass | Dimensions: 7.5cm x 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| cord strings | Dimensions: 2x approx. 11cm | ||
| thin bent plastic | bucket to hold reward; positioned on slant | ||
| threaded rod | Dimensions: M8; length: 7cm | ||
| TASK SEESAW | |||
| 2x acrylic glass | Dimensions: 10cm x 1.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 1.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 10cm x 3cm x 0.5cm | ||
| acrylic glass | Dimensions: 4cm x 1.5cm x 1cm | ||
| small hinge | |||
| TASK PLANK | |||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin tin | bent approx. 1cm inside box Dimensions: 6.5cm x 3cm | ||
| TASK CUP | |||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5; base diameter: 3cm | ||
| TASK FLIP-BOX | |||
| 2x acrylic glass triangle | Dimensions: 7cm x 5cm x 5cm; thickness: 0.5cm | ||
| 2x acrylic glass | Dimensions: 4.5cm x 5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 7cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SLIDE | |||
| 4x acrylic glass | Dimensions: 15cm x 1cm x 0.5cm | ||
| acrylic glass door | Dimensions: 6cm x 6cm x 0.5cm | ||
| TASK DJ | |||
| 2x small nut | for attachment | ||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| plastic disc | Dimensions: diameter 12cm | ||
| thin threaded rod | Dimensions: length: approx. 3cm | ||
| TASK WIRE | |||
| acrylic glass | Dimensions: 9.5cm x 9.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 12cm x 2cm x 1cm | ||
| 2x small hinge | |||
| wire from a paperclip | |||
| TASK TWIG | |||
| 2x small hinge | |||
| acrylic glass | Dimensions: 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| white cardboard | Dimensions: 13cm x 4cm | ||
| Y-shaped twig | Dimensions: length: approx. 14cm | ||
| TASK COVER | |||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| thin plastic | Dimensions: diameter: 5cm | ||
| TASK BITE | recommended: put tape on sides of platform the keep reward from falling off | ||
| 2-3 paper clips | |||
| 2x cutout from clipboard | Dimensions: 10cm x 3cm | ||
| acrylic glass | hole in middle Dimensions: 5cm x 3cm x 1cm | ||
| toilet paper | |||
| TASK DRAWER | |||
| 2x acrylic glass | Dimensions: 5cm x 2.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 3cm x 1cm | ||
| acrylic glass | hole approx. 2 cm from front Dimensions: 5cm x 5cm x 1cm | ||
| OTHER MATERIAL | |||
| wide-angle videocamera |
参考文献
- Fisher, J. The opening of milkbottles by birds. British Birds. 42, 347-357 (1949).
- Kummer, H., Goodall, J. Conditions of innovative behaviour in primates. Philosophical Transactions of the Royal Society of London. B, Biological Sciences. 308 (1135), 203-214 (1985).
- Tebbich, S., Griffin, A. S., Peschl, M. F., Sterelny, K. From mechanisms to function: an integrated framework of animal innovation. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150195 (2016).
- Reader, S. M., Laland, K. N. Social intelligence, innovation, and enhanced brain size in primates. Proceedings of the National Academy of Sciences. 99 (7), 4436-4441 (2002).
- Reader, S. M., Laland, K. N. Primate innovation: Sex, age and social rank differences. International Journal of Primatology. 22 (5), 787-805 (2001).
- Lefebvre, L., Whittle, P., Lascaris, E., Finkelstein, A. Feeding innovations and forebrain size in birds. Animal Behaviour. 53 (3), 549-560 (1997).
- Lefebvre, L., et al. Feeding innovations and forebrain size in Australasian birds. Behaviour. 135 (8), 1077-1097 (1998).
- Timmermans, S., Lefebvre, L., Boire, D., Basu, P. Relative size of the hyperstriatum ventrale is the best predictor of feeding innovation rate in birds. Brain, Behavior and Evolution. 56 (4), 196-203 (2000).
- Ducatez, S., Clavel, J., Lefebvre, L. Ecological generalism and behavioural innovation in birds: technical intelligence or the simple incorporation of new foods. Journal of Animal Ecology. 84 (1), 79-89 (2015).
- Sol, D., Lefebvre, L., Rodríguez-Teijeiro, J. D. Brain size, innovative propensity and migratory behaviour in temperate Palaearctic birds. Proceedings of the Royal Society B: Biological Sciences. 272 (1571), 1433-1441 (2005).
- Sol, D., Sayol, F., Ducatez, S., Lefebvre, L. The life-history basis of behavioural innovations. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150187 (2016).
- Griffin, A. S., Guez, D. Innovation and problem solving: A review of common mechanisms. Behavioural Processes. 109, 121-134 (2014).
- Laumer, I. B., Bugnyar, T., Reber, S. A., Auersperg, A. M. I. Can hook-bending be let off the hook? Bending/unbending of pliant tools by cockatoos. Proceedings of the Royal Society B. Biological Sciences. 284 (1862), 20171026 (2017).
- Rutz, C., Sugasawa, S., Vander Wal, J. E. M., Klump, B. C., St Clair, J. J. H. Tool bending in New Caledonian crows. Royal Society Open Science. 3 (8), 160439 (2016).
- Weir, A. A. S., Kacelnik, A. A New Caledonian crow (Corvus moneduloides) creatively re-designs tools by bending or unbending aluminium strips. Animal Cognition. 9 (4), 317-334 (2006).
- Herrmann, E., Hare, B., Call, J., Tomasello, M. Differences in the cognitive skills of bonobos and chimpanzees. PloS One. 5 (8), 12438 (2010).
- Herrmann, E., Call, J., Hernández-Lloreda, M. V., Hare, B., Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science. 317 (5843), 1360-1366 (2007).
- Auersperg, A. M. I., Gajdon, G. K., von Bayern, A. M. P. A new approach to comparing problem solving, flexibility and innovation. Communicative & Integrative Biology. 5 (2), 140-145 (2012).
- Auersperg, A. M. I., von Bayern, A. M. P., Gajdon, G. K., Huber, L., Kacelnik, A. Flexibility in problem solving and tool use of Kea and New Caledonian crows in a multi access box paradigm. PLoS One. 6 (6), 20231 (2011).
- Daniels, S. E., Fanelli, R. E., Gilbert, A., Benson-Amram, S. Behavioral flexibility of a generalist carnivore. Animal Cognition. 22 (3), 387-396 (2019).
- Johnson-Ulrich, L., Holekamp, K. E., Hambrick, D. Z. Innovative problem-solving in wild hyenas is reliable across time and contexts. Scientific Reports. 10 (1), 13000 (2020).
- Johnson-Ulrich, L., Johnson-Ulrich, Z., Holekamp, K. Proactive behavior, but not inhibitory control, predicts repeated innovation by spotted hyenas tested with a multi-access box. Animal Cognition. 21 (3), 379-392 (2018).
- Williams, D. M., Wu, C., Blumstein, D. T. Social position indirectly influences the traits yellow-bellied marmots use to solve problems. Animal Cognition. 24 (4), 829-842 (2021).
- Cooke, A. C., Davidson, G. L., van Oers, K., Quinn, J. L. Motivation, accuracy and positive feedback through experience explain innovative problem solving and its repeatability. Animal Behaviour. 174, 249-261 (2021).
- Huebner, F., Fichtel, C. Innovation and behavioral flexibility in wild redfronted lemurs (Eulemur rufifrons). Animal Cognition. 18 (3), 777-787 (2015).
- Godinho, L., Marinho, Y., Bezerra, B. Performance of blue-fronted amazon parrots (Amazona aestiva) when solving the pebbles-and-seeds and multi-access-box paradigms: ex situ and in situ experiments. Animal Cognition. 23 (3), 455-464 (2020).
- Bouchard, J., Goodyer, W., Lefebvre, L. Social learning and innovation are positively correlated in pigeons (Columba livia). Animal Cognition. 10 (2), 259-266 (2007).
- Griffin, A. S., Diquelou, M., Perea, M. Innovative problem solving in birds: a key role of motor diversity. Animal Behaviour. 92, 221-227 (2014).
- Webster, S. J., Lefebvre, L. Problem solving and neophobia in a columbiform-passeriform assemblage in Barbados. Animal Behaviour. 62 (1), 23-32 (2001).
- Haslam, M. 34;Captivity bias" in animal tool use and its implications for the evolution of hominin technology. Philosophical Transactions of the Royal Society B: Biological Sciences. 368 (1630), 20120421 (2013).
- Lambert, M. L., Jacobs, I., Osvath, M., von Bayern, A. M. P. Birds of a feather? Parrot and corvid cognition compared. Behaviour. , 1-90 (2018).
- Rössler, T., et al. Using an Innovation Arena to compare wild-caught and laboratory Goffin´s cockatoos. Scientific Reports. 10 (1), 8681 (2020).
- Laumer, I. B., Bugnyar, T., Auersperg, A. M. I. Flexible decision-making relative to reward quality and tool functionality in Goffin cockatoos (Cacatua goffiniana). Scientific Reports. 6, 28380 (2016).
- Friard, O., Gamba, M. BORIS: a free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- R. Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. , (2020).
- McCullagh, P., Nelder, J. A. Generalized linear models. Monographs on Statistics and Applied Probability. , (1989).
- Forstmeier, W., Schielzeth, H. Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner's curse. Behavioral Ecology and Sociobiology. 65 (1), 47-55 (2011).
- Kaiser, H. F. The application of electronic computers to factor analysis. Educational and Psychological Measurement. 20 (1), 141-151 (1960).
- . Online 3D Viewer Available from: https://github.com/lovacsv/Online3DViewer (2021)
- Greenberg, R. S., Mettke-Hofmann, C. Ecological aspects of neophobia and neophilia in birds. Current Ornithology. 16, 119-169 (2001).
- Mettke-Hofmann, C., Winkler, H., Leisler, B. The Significance of Ecological Factors for Exploration and Neophobia in Parrots. Ethology. 108 (3), 249-272 (2002).
- O'Hara, M., et al. The temporal dependence of exploration on neotic style in birds. Scientific Reports. 7 (1), 4742 (2017).
- Chevalier-Skolnikoff, S., Liska, J. O. Tool use by wild and captive elephants. Animal Behaviour. 46 (2), 209-219 (1993).
- Benson-Amram, S., Weldele, M. L., Holekamp, K. E. A comparison of innovative problem-solving abilities between wild and captive spotted hyaenas, Crocuta crocuta. Animal Behaviour. 85 (2), 349-356 (2013).
- Gajdon, G. K., Fijn, N., Huber, L. Testing social learning in a wild mountain parrot, the kea (Nestor notabilis). Animal Learning and Behavior. 32 (1), 62-71 (2004).
- Shettleworth, S. J. . Cognition, Evolution, and Behavior. , (2009).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。