
Method Article
A Arena de Inovação: um método para comparar problemas inovadores entre grupos
Neste Artigo
Resumo
A Arena de Inovação é um novo método comparativo para estudar taxa de inovação técnica por unidade de tempo em animais. É composto por 20 tarefas diferentes de resolução de problemas, que são apresentadas simultaneamente. As inovações podem ser realizadas livremente e a configuração é robusta no que diz respeito a predisposições em nível individual, populacional ou de espécies.
Resumo
Tarefas de resolução de problemas são comumente usadas para investigar comportamentos técnicos e inovadores, mas uma comparação dessa capacidade em uma ampla gama de espécies é um empreendimento desafiador. Predisposições específicas, como o kit de ferramentas morfológicas de uma espécie ou técnicas de exploração, podem influenciar substancialmente o desempenho em tais tarefas, o que dificulta as comparações diretas. O método aqui apresentado foi desenvolvido para ser mais robusto no que diz respeito a tais diferenças específicas das espécies: a Arena de Inovação apresenta 20 diferentes tarefas de resolução de problemas. Todas as tarefas são apresentadas simultaneamente. Os sujeitos são confrontados com o aparelho repetidamente, o que permite medir o surgimento de inovações ao longo do tempo - um importante próximo passo para investigar como os animais podem se adaptar às mudanças das condições ambientais por meio de comportamentos inovadores.
Cada indivíduo foi testado com o aparelho até que deixou de descobrir soluções. Após a conclusão dos testes, analisamos as gravações de vídeo e codificamos a recuperação bem sucedida de recompensas e múltiplos comportamentos dirigidos por aparelhos. Estes últimos foram analisados por meio de uma Análise de Componentes Principais e os componentes resultantes foram então incluídos em um Modelo Misto Linear Generalizado juntamente com o número da sessão e a comparação de grupo de interesse para prever a probabilidade de sucesso.
Usamos essa abordagem em um primeiro estudo para abordar a questão de se o cativeiro a longo prazo influencia a capacidade de resolução de problemas de uma espécie de papagaio conhecida por seu comportamento inovador: a cacatua de Goffin. Encontramos um efeito no grau de motivação, mas não há diferença na capacidade de resolução de problemas entre grupos cativos de curto e longo prazo.
Introdução
Uma grande teta (Parus maior) é confrontada com uma garrafa de leite, mas não pode acessar o leite diretamente, pois a garrafa é fechada por uma folha de alumínio. Ele encontra uma solução para este problema bicando através da folha para que ele possa beber o creme. Esta situação descreve um dos exemplos mais conhecidos de inovação animal1.
Resolver tais problemas pode ser vantajoso, especialmente em ambientes sujeitos a mudanças frequentes. Kummer e Goodall2 definiram amplamente a inovação como encontrar "uma solução para um novo problema, ou uma nova solução para um antigo". Uma definição mais detalhada de inovação foi postulada por Tebbich e seus colegas3 como "a descoberta de uma nova interação comportamental com o ambiente social ou físico, aproveitando uma oportunidade existente e/ou criando uma nova oportunidade".
Testemunhar inovações espontâneas exige observações minuciosas e demoradas, o que muitas vezes não é viável em uma estrutura que inclui uma grande variedade de espécies. Para lidar com esse desafio, pesquisadores realizaram rigorosas revisões de literatura para estimar a taxa de inovação 4,5 e descobriram correlações entre a propensão a inovar e outros fatores como medidas neurológicas 6,7,8 e ecologia alimentar 9,10,11 . Testes experimentais, no entanto, podem provocar comportamentos inovadores em um ambiente controlado. Por essa razão, os desempenhos em tarefas técnicas de resolução de problemas são frequentemente usados como um proxy para capacidades inovadoras em animais (ver revisão em12).
Uma variedade de abordagens diferentes têm sido usadas para investigar a resolução inovadora de problemas: por exemplo, diferentes grupos de animais podem ser comparados pelo seu desempenho em uma determinada tarefa. Esses estudos são tipicamente direcionados a inovações específicas ou habilidades cognitivas (por exemplo, comportamento de dobra de gancho; ver 13,14,15). Isso permite que os pesquisadores obtenham informações detalhadas dentro de um contexto específico, mas a interpretação de quaisquer semelhanças ou diferenças é limitada pela natureza da tarefa, o que pode exigir diferentes força inovadora de diferentes grupos (como discutido em13,14).
Outros estudos implementaram uma série de tarefas consecutivas16,17. Uma comparação de desempenhos em múltiplas tarefas e uma estimativa da competência geral dentro de domínios específicos é possível por este método. Uma limitação desses estudos, no entanto, está na apresentação sucessiva das diferentes tarefas, o que não permite uma investigação do surgimento de inovações ao longo do tempo.
Outra abordagem é oferecer simultaneamente diferentes opções de acesso a uma única recompensa. Isso é frequentemente conseguido usando a Multi Access Box (MAB)18,19,20,21,22,23,24,25,26, onde uma recompensa é colocada no centro de uma caixa de quebra-cabeça e é recuperada através de quatro soluções diferentes. Uma vez que a mesma solução é usada de forma consistente, ela é bloqueada e o animal precisa mudar para outra solução para acessar a recompensa. Através desse experimento, entre e dentro das preferências das espécies podem ser detectadas e contabilizadas, mas ainda limita a expressão de comportamento inovador a uma solução por ensaio 18,19,20,21. Em outros estudos, os animais também foram apresentados com aparelhos contendo múltiplas soluções ao mesmo tempo, cada um com recompensas separadas. Isso permite múltiplas inovações dentro de um único teste, mas, até agora, as tarefas foram em grande parte limitadas a algumas soluções motoricamente distintas. Como não era o foco desses estudos, as configurações experimentais não envolviam exposições repetidas ao aparelho, o que permitiria uma medida da taxa de inovação por tempounidade 27,28,29.
Aqui apresentamos um método que, além de outras abordagens, pode nos ajudar no objetivo de comparar diferentes espécies em suas habilidades inovadoras de resolução de problemas. Desenvolvemos uma gama mais ampla de tarefas dentro de uma única configuração, que devem diferir em dificuldade por grupo ou espécie. É, portanto, menos provável que as disparidades específicas de tarefas influenciem a probabilidade global de encontrar soluções. Além disso, apresentamos todas as tarefas simultaneamente e repetidamente para medir o surgimento de inovações ao longo do tempo. Essa medida tem o potencial de melhorar nossa compreensão sobre o valor adaptativo do comportamento inovador.
Um primeiro estudo usando esse método investigou se o cativeiro a longo prazo influencia as habilidades de resolução de problemas (como sugerido pelo chamado efeito cativeiro; ver30) da cacatua goffiniana (Cacatua goffiniana; de agora em diante: Goffins), uma espécie modelo aviária para a inovação técnica (revisada em31).
Protocolo
Este estudo foi aprovado pelo Comitê de Ética e Bem-Estar Animal da Universidade de Medicina Veterinária de Viena, de acordo com as diretrizes de boas práticas científicas e legislação nacional. O experimento foi puramente apetitoso e estritamente não invasivo e, portanto, foi classificado como um experimento não-animal de acordo com a Lei austríaca de Experimentos Animais (TVG 2012). A parte do experimento realizado na Indonésia foi aprovada pelo Ministério da Pesquisa, Tecnologia e Ensino Superior (RISTEK) com base em reunião da Equipe Coordenadora de Licenças de Pesquisadores Estrangeiros (10/TKPIPA/E5/Dit.KI/X/2016) que concedeu as licenças para conduzir esta pesquisa ao M.O. (410/SIP/FRP/E5/Dit.KI/XII/2016) e B.M. (411/SIP/FRP/ E5/Dit.KI/XII/2016).
1. Pré-requisitos/pré-requisitos
- Básico
- Certifique-se de que os sujeitos possam ser identificados individualmente. As espécies de estudo podem ter padrões individuais distintos ou indivíduos podem ser marcados (por exemplo, com anéis de cor ou tinta não tóxica).
NOTA: Para obter mais informações sobre o toque, bem como capturar e liberar Goffins selvagens, consulte o Procedimento de liberação de captura em Informações Suplementares de32. - Certifique-se de que uma sala visualmente ocluída está disponível para testes para evitar o aprendizado social entre os sujeitos.
- Identifique uma recompensa altamente preferida para as espécies e grupos de estudo testando múltiplos mimos diferentes disponíveis (ver33 ou Teste de Preferência Alimentar em Informações Complementares de referência32).
- Considere se o tempo de alimentação difere substancialmente entre os grupos. Nesse caso, considere um protocolo que garanta que o tempo de alimentação não reduza fortemente o tempo disponível para resolver tarefas para um dos grupos (consulte o passo 4.8 para obter mais informações).
NOTA: Neste estudo, houve preferência do grupo cativo de longo prazo para cajus e milho seco em grupo cativo de curto prazo.
- Certifique-se de que os sujeitos possam ser identificados individualmente. As espécies de estudo podem ter padrões individuais distintos ou indivíduos podem ser marcados (por exemplo, com anéis de cor ou tinta não tóxica).
- Projetando a Arena de Inovação
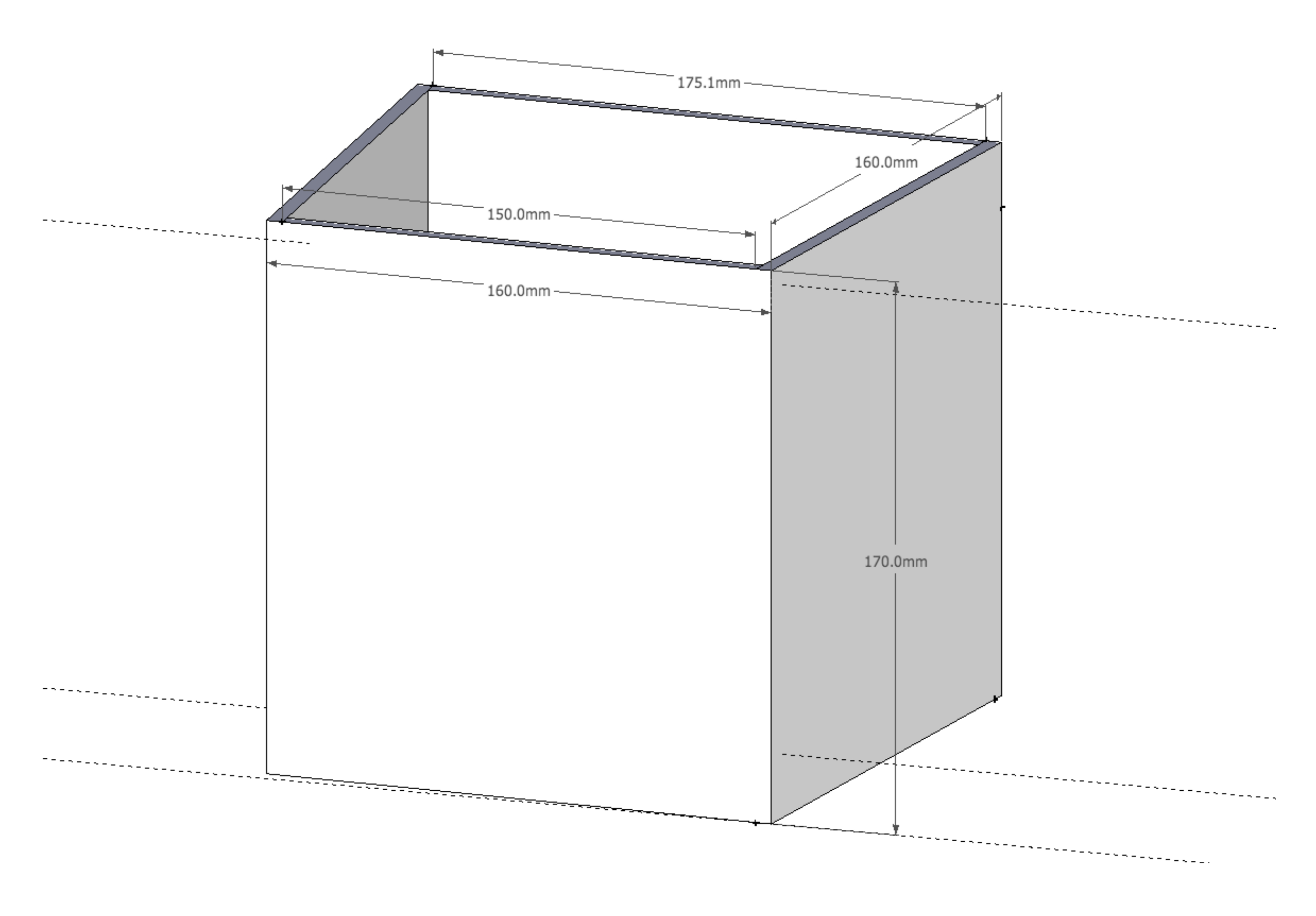
NOTA: O aparelho completo, ou seja, a Arena de Inovação, consiste em 20 caixas de quebra-cabeças diferentes, dispostas em um semi-círculo em uma plataforma de madeira.- Projete o contorno básico das caixas em um tamanho aplicável para as espécies de estudo. Use caixas transparentes com forma trapezoide (para fácil alinhamento em um semi-círculo), tampas removíveis (para permitir iscas entre as sessões) e bases destacáveis (ver Figura 1).
NOTA: Cada base permanecerá mais tarde em uma posição permanente, enquanto o resto das caixas mudará de posição. No estudo apresentado, o tamanho das caixas foi escolhido para garantir que cada quebra-cabeça seja facilmente acessível pelas cacatuas. As dimensões podem ser ajustadas para cada espécie de estudo. - Projete uma plataforma para segurar as 20 caixas de quebra-cabeça.
- Projete um sistema de fixação que mantenha as tampas das caixas no lugar durante o teste e, portanto, não possa ser removido pelos sujeitos durante as sessões de teste.
NOTA: Tem que ser destacável do aparelho, pois as tampas das caixas precisam ser retiradas para isca. - Para a frente de cada caixa, projete 20 tarefas diferentes, cada uma delas constituirá um desafio técnico diferente (ver Figura 2).
NOTA: As tarefas para este experimento foram projetadas com o objetivo de que as soluções se enquadram na gama morfológica de muitas espécies diferentes. Para a força comparativa, seria ideal usar tarefas tão semelhantes a essas quanto possível, mas tenha em mente que é de importância ainda maior que as tarefas sejam novas para os sujeitos. Consulte a Tabela de Materiais para medições exatas e o Desenho Técnico Suplementar para uma ilustração mais detalhada das tarefas. - Adquira todo o material necessário para o aparelho.
- Certifique-se de ter uma câmera grande angular, um software de codificação (recomendado, por exemplo, Software Interativo de Pesquisa de Observação Comportamental, BORIS34) e software para análise estatística (recomendado, por exemplo, R35).
NOTA: Para estudos de campo, o ideal é projetar a arena antes de partir para o local de estudo e trazer o máximo possível dos equipamentos essenciais, como vidro acrílico pré-cortado, junto.
- Projete o contorno básico das caixas em um tamanho aplicável para as espécies de estudo. Use caixas transparentes com forma trapezoide (para fácil alinhamento em um semi-círculo), tampas removíveis (para permitir iscas entre as sessões) e bases destacáveis (ver Figura 1).

Figura 1: Diagrama de uma caixa básica de três lados. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 2: Tarefas da Arena de Inovação com uma descrição correspondente da ação motorica necessária para a resolução ( = recompensa; setas vermelhas indicam direções de ações necessárias para resolver tarefas; setas amarelas indicam trajetórias de recompensa). As tarefas são organizadas de acordo com sua dificuldade média (da esquerda para a direita, de cima para baixo). Publicado anteriormente em32. Clique aqui para ver uma versão maior desta figura.
= recompensa; setas vermelhas indicam direções de ações necessárias para resolver tarefas; setas amarelas indicam trajetórias de recompensa). As tarefas são organizadas de acordo com sua dificuldade média (da esquerda para a direita, de cima para baixo). Publicado anteriormente em32. Clique aqui para ver uma versão maior desta figura.
{kind=link}
2. Preparativos
- Cole três lados das caixas: esquerda, costas e lado direito, mas não na frente, superior e base.
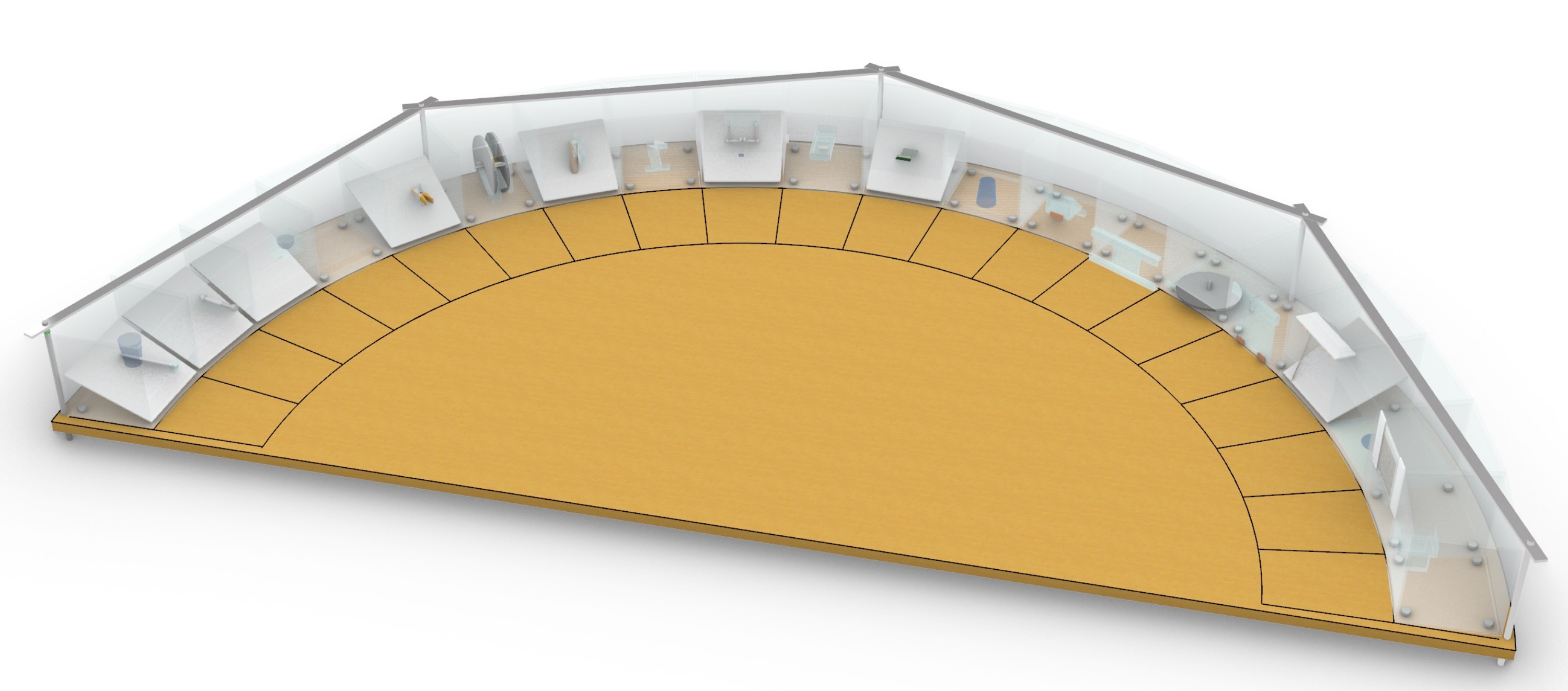
- Posicione cada caixa de três lados em cima de cada base e alinhe-as uniformemente em um semicírculo na plataforma (Figura 3). A parte frontal de cada caixa deve sentar-se a 1 m do centro.
NOTA: Os mecanismos que constituem a tarefa (faces frontais das caixas e possíveis conteúdos) serão adicionados em um momento posterior durante o experimento. - Desenhe uma linha de cada caixa 20 cm em direção ao centro da arena e conecte as linhas, resultando em uma grade de proximidade (Figura 3).
NOTA: Dependendo do tamanho da espécie de estudo, uma distância diferente pode ser mais apropriada. Para o estudo aqui apresentado, 20 cm foi escolhido por ter aproximadamente o comprimento de um Goffin (penas traseiras excluídas). - Remova tudo, exceto as bases das caixas e conecte-as permanentemente à plataforma. Isso garantirá que as caixas permaneçam no lugar durante o experimento.
- Coloque uma câmera grande angular no teto acima da arena.
- Prepare um cronograma para a posição de cada caixa por sessão e assunto. Cada assunto será sempre confrontado com todas as caixas, mas com um novo arranjo a cada sessão. A localização (posições de 1 a 20) de cada tarefa deve ser atribuída aleatoriamente com a restrição de nenhuma caixa estar na mesma posição duas vezes por assunto.
NOTA: Esta é a situação ideal. Se não se pode planejar a ordem de teste dos sujeitos (o que é mais provável em estudos de campo) essa limitação de randomização (sem caixa na mesma posição duas vezes) entre as sessões (mas não dentro do assunto) deve ser suficiente.

Figura 3: A Arena de Inovação. Tarefas organizadas em um semi-círculo; as posições das 20 tarefas são trocadas. Uma grade de proximidade (20 cm na frente de cada caixa) é marcada em preto. Clique aqui para ver uma versão maior desta figura.
{kind=link}
3. Habituação
NOTA: O objetivo da habitação é reduzir as influências das reações neofóbicas em relação à arena. Garantir um nível mínimo de habitação para todos os sujeitos através de um procedimento de habitação que exige que cada indivíduo atinja dois critérios.
- Habituação à arena não funcional (até o critério I)
- Posicione todas as caixas de três lados nas bases, adicione a tampa de cada caixa e segure-as no lugar com o sistema de fixação (sem o assunto presente).
NOTA: Considere habituar os sujeitos em etapas apropriadas para cada espécie, por exemplo, adicionando incrementalmente mais caixas à plataforma, apresentando a arena em sua área de origem, colocando recompensas em qualquer posição da plataforma, como ao redor, no topo, e com as caixas ou confrontá-las com o aparelho em grupos maiores primeiro e gradualmente minimizar o tamanho do grupo. - Familiarize os sujeitos com elementos separados das tarefas que podem provocar reações neofóbicas.
NOTA: Esses elementos separados (ou seja, tudo menos as caixas básicas, plataforma e sistema de fixação) não devem ser combinados em mecanismos funcionais nesta fase. - Coloque uma recompensa dentro da caixa (centro). Traga o sujeito para o compartimento.
- Aguarde o duração de uma sessão sem interferir. Os sujeitos agora devem comer as recompensas.
NOTA: A duração dessas sessões de habituação difere no experimento: aves em cativeiro de longo prazo receberam 10 minutos, enquanto as cacatuas em cativeiro de curto prazo tinham 20 minutos para comer as recompensas. Isso foi necessário para explicar um tempo de alimentação substancialmente maior devido a diferentes tipos de recompensa. Este problema foi abordado de forma diferente mais tarde nas sessões de teste (ver etapa 4.8). - Repita para cada assunto (uma sessão por dia de teste) até que o critério seja atingido: Cada indivíduo consome todas as recompensas de caixas de três lados (uma recompensa por caixa) dentro de três sessões consecutivas enquanto está visualmente isolado do grupo.
- Posicione todas as caixas de três lados nas bases, adicione a tampa de cada caixa e segure-as no lugar com o sistema de fixação (sem o assunto presente).
- Habituação à arena funcional (até o critério II)
- Cole e anexa permanentemente todos os elementos necessários às caixas para torná-los caixas de quebra-cabeça funcionais.
NOTA: Neste ponto, a arena está totalmente funcional como nas sessões de teste. - Coloque as caixas aleatoriamente na plataforma (elas serão mantidas no lugar pelas bases) e fixe as tampas nas caixas.
- Coloque uma recompensa na tampa de cada caixa na borda mais próxima do centro da arena.
- Traga o sujeito para o compartimento.
- Aguarde o duração de uma sessão sem interferir.
NOTA: Os sujeitos devem agora comer as recompensas. - Repita para cada assunto (uma sessão por dia de teste) até que o critério seja atingido.
NOTA: Critério II: O indivíduo consome todas as recompensas do topo das caixas de quebra-cabeça funcionais (uma recompensa por caixa) dentro de uma sessão enquanto é visualmente isolado do grupo. Esse critério II garantirá que os sujeitos não tenham medo da arena, mesmo quando novas peças forem anexadas. No entanto, eles não devem interagir com os mecanismos e devem ser interrompidos se o fizerem.
- Cole e anexa permanentemente todos os elementos necessários às caixas para torná-los caixas de quebra-cabeça funcionais.
4. Teste
- Coloque as caixas na plataforma de acordo com o cronograma de randomização.
- Isca cada tarefa no local apropriado dentro das caixas (ver Figura 2).
NOTA: A localização exata de cada recompensa depende da tarefa específica e pode ser vista no vídeo. - Conecte as tampas às caixas e fixe-as com o sistema de fixação (para garantir que os sujeitos não possam retirá-las).
- Separe um assunto individual e leve-o para o compartimento de teste. Os sujeitos são testados um de cada vez para evitar interferências na aprendizagem social.
- Posicione-os na posição inicial (ou seja, o ponto que está a uma distância igual a todas as tarefas no centro da plataforma) ou coloque um incentivo (por exemplo, uma recompensa) na posição inicial para garantir que o assunto comece lá.
- Inicie o temporizador e aguarde por 20 minutos (duração da sessão) sem interferir ou interagir com o assunto. O sujeito pode resolver o máximo de tarefas possível.
- Se o sujeito se distrair com objetos não relacionados ao aparelho, o experimentador poderá colocá-los de volta na posição inicial da arena (se possível).
- Se o sujeito se alimentar por mais de 3 s na recompensa, pare o temporizador, espere até que a alimentação esteja concluída e, em seguida, retome o tempo.
NOTA: Isso é feito para garantir que o tempo máximo disponível para resolver tarefas não seja reduzido pelo tempo de alimentação e, portanto, igual para ambos os grupos. - Se o sujeito não interagir com nenhuma tarefa dentro dos primeiros 3 minutos e também não estiver agitado, aplique um protocolo de motivação (ver seção 5).
- Uma vez que os 20 min tenham transcorrido (duração máxima de uma sessão) ou o participante tenha resolvido todas as tarefas, o assunto é feito com o teste do dia e pode ser liberado de volta para a área de origem.
- No dia do teste seguinte, repita este procedimento.
- Continue testando cada indivíduo até que ele não resolva nenhuma nova tarefa nas últimas cinco sessões ou não resolva nenhuma tarefa em 10 sessões consecutivas.
5. Protocolo de motivação
NOTA: Conforme descrito acima (etapa 4.9), um protocolo motivacional pode ser implementado se um indivíduo não interagir com qualquer tarefa nos primeiros 3 minutos de uma sessão.
- Coloque três recompensas em cima das caixas (escolha uma caixa no lado esquerdo, médio e direito para isso). Se o sujeito começar a interagir com qualquer tarefa 3 minutos depois de consumir as recompensas, retome a sessão (a duração de 20 minutos começa neste momento).
- Caso não, coloque cinco recompensas dispersas na linha de aproximação (ou seja, grade de proximidade). Se o sujeito começar a interagir com qualquer tarefa 3 minutos depois de consumir as recompensas, retome a sessão (a duração de 20 minutos começa neste momento).
- Se não, coloque cinco recompensas na posição inicial. Se o sujeito começar a interagir com qualquer tarefa 3 minutos depois de consumir as recompensas, retome a sessão (o prazo de 20 minutos começa neste momento).
- Se não, coloque um punhado de recompensas na posição inicial e encerre a sessão de teste para este dia (mas dê ao sujeito algum tempo para consumir as recompensas).
6. Análise
- Codificação comportamental
- Antes de analisar os vídeos, examine o protocolo de codificação em detalhes (Tabela 1) e considere se são necessários ajustes para que as espécies sejam testadas.
NOTA: As descrições das variáveis de codificação devem ser as mais específicas possíveis para evitar diferenças de codificação entre vários pesquisadores. - Eventos de ponto anotados de: Número de tarefas diferentes tocadas (TarefasAstocadas; Observe que o número máximo de tarefas tocadas é de 20), número de tarefas resolvidas (Tarefas Resolvidas), contato com tarefas iscas (BaitedContact) e contato com tarefas resolvidas (SolvedContact).
- Anotar durações para latência até que o sujeito cruze o pensionista externo da linha de grade (LatencyGrid) e o tempo gasto dentro da grade (GridTime).
- Antes de analisar os vídeos, examine o protocolo de codificação em detalhes (Tabela 1) e considere se são necessários ajustes para que as espécies sejam testadas.
- Análise estatística
- Determine se as medidas para comportamentos direcionados ao aparelho (LatencyGrid, GridTime, TasksTouched, BaitedContact, SolvedContact) estão correlacionadas.
- Se sim, extrair os principais componentes usando uma análise de componentes principais antes de incluí-los no modelo como preditores.
- Se eles não estiverem correlacionados, inclua-os separadamente no modelo como preditores.
- Execute um modelo misto linear generalizado com estrutura de erro binomial e função de link logit36. Para prever a probabilidade de sucesso (ou seja, a variável de resposta sendo SolvedTasks), encaixar o modelo com estrutura de inclinação aleatória máxima e incluir interceptações aleatórias para sujeito, tarefa, um fator combinado de assunto e sessão (SessionID), e um fator combinado de assunto e tarefa (Subj.Task) para evitar pseudo-replicação. Use a comparação de interesses (por exemplo, espécies) e os Componentes Principais como variáveis preditoras e controle para sessão. Considere possíveis interações.
- Para evitar testes múltiplos enigmáticos37 primeiro compare o modelo com um modelo sem todos os efeitos fixos de interesse antes de testar preditores individuais.
- Para testar uma diferença geral de dificuldade nas tarefas entre grupos, compare o modelo (completo) com um que não tem a inclinação aleatória do grupo dentro da tarefa.
Resultados
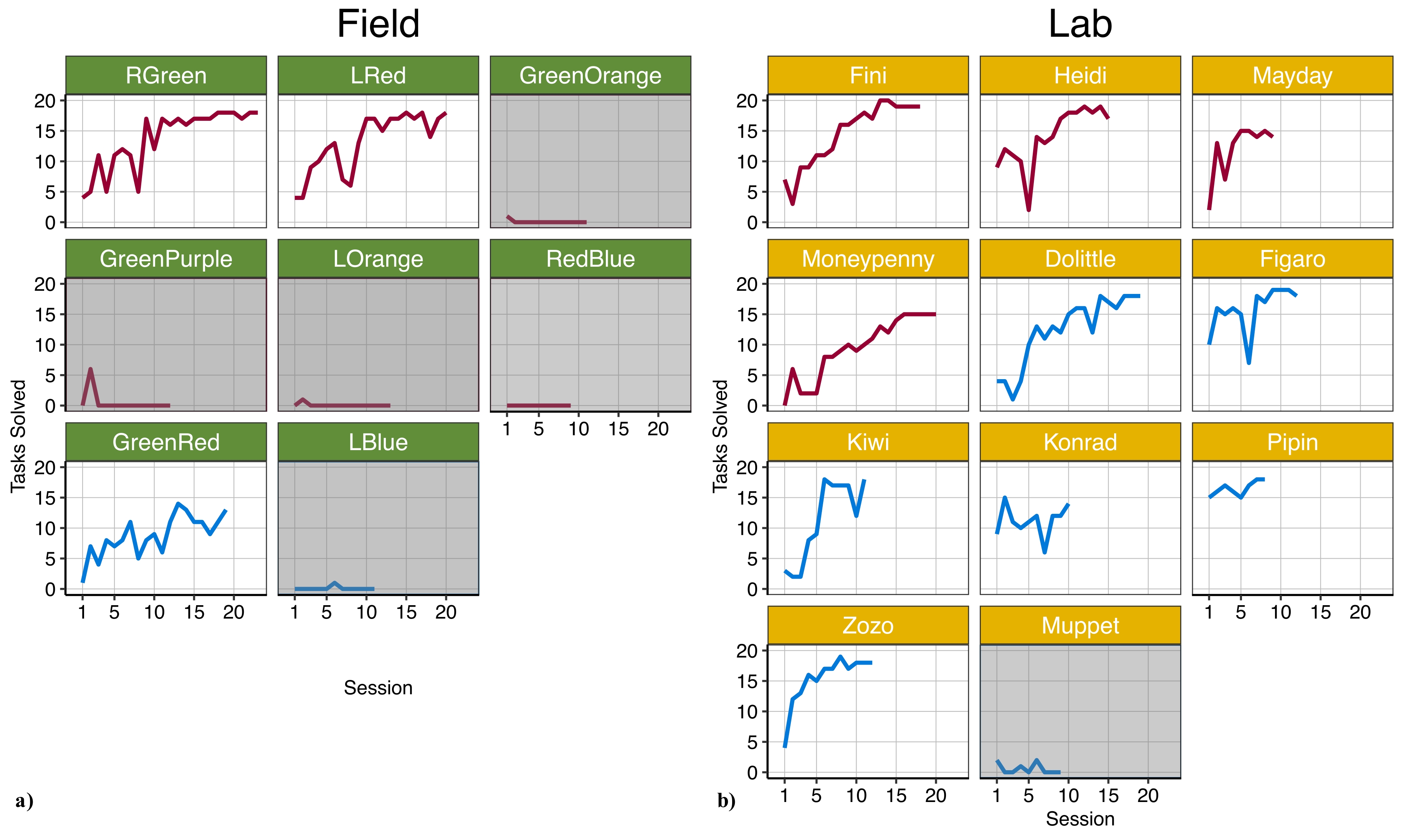
Dezenove sujeitos foram testados utilizando-se a Arena de Inovação: 11 cacatuas cativas de longo prazo e 8 de curto prazo (Figura 4).

Figura 4: Uma visão geral do número de tarefas resolvidas por sessão para cada indivíduo. a) Grupo de campo, b) Grupo de laboratório. Linhas vermelhas = feminino; linhas azuis = masculino. Os sujeitos que receberam o protocolo motivacional devido à sua relutância em interagir com o aparelho foram classificados como não motivados e retratados com fundo cinza. Publicado anteriormente em Informações Complementares de32. Clique aqui para ver uma versão maior desta figura.
{kind=link}
A Análise de Componentes Principais resultou em dois componentes com Valores Eigen acima do critério38 da Kaiser (ver Tabela 2 para saída PCA). O PC1 carregado na frequência de contatos com tarefas, o tempo gasto nas proximidades (ou seja, dentro da grade) das tarefas e o número de tarefas tocadas. O PC2 foi positivamente afetado pelo número de contatos com tarefas já resolvidas e negativamente com o número de tarefas tocadas, não resolvidas. Tais comportamentos orientados por tarefas são frequentemente usados para medir motivação (ver12 para uma revisão). Por isso, utilizamos PC1 e PC2 como medidas quantitativas para motivação para interagir com o aparelho em nosso modelo. Juntos, explicaram 76,7% da variância em comportamentos direcionados a aparelhos e ambos, bem como a sessão, influenciaram significativamente a probabilidade de resolver tarefas (PC1: estimativa = 2,713, SE ± 0,588, χ 2= 28,64 , p < 0,001; PC2: estimativa = 0,906, SE ± 0,315, χ2 = 9,106, p = 0,003; sessão: estimativa = 1.719, SE ± 0,526, χ2 = 6,303, p = 0,001; ver Figura 5; ver Tabela 4).

Figura 5: Influência dos preditores de controle sobre a probabilidade de resolver: (a ) PC1, (b) PC2, (c) Sessão. Os pontos mostram dados observados, área de pontos indica o número de observações para cada ponto de dados, linhas tracejadas mostram valores ajustados do modelo e as áreas simbolizam intervalos de confiança do modelo. Publicado anteriormente em32. Clique aqui para ver uma versão maior desta figura.
{kind=link}
Seis dos 19 sujeitos receberam o protocolo motivacional durante o experimento (Laboratório: 1 em cada 11; Campo: 5 de 8). O PC1 dessas aves, que classificamos como não motivados, variou entre -2.934 a -2,2, enquanto valores positivos foram encontrados para todos os outros indivíduos motivados (Tabela 3).
Com o método apresentado não encontramos diferença de grupo sobre a probabilidade de resolver as 20 tarefas técnicas de resolução de problemas da Arena de Inovação (estimativa = −0,089, SE ± 1,012, χ2 = 0,005, p = 0,945; Figura 5; ver Tabela 4 para estimativas de efeitos fixos; todos os pássaros incluídos).
Uma comparação pós-hoc do modelo com um incluindo um termo de interação de grupo com sessão (estimativa = 2,924, SE ± 0,854, χ2 = 14,461, p < 0,001) sugere menor probabilidade de resolver no grupo de campo em sessões anteriores, mas não nas posteriores. Essa diferença nas sessões anteriores pode ser devido ao alto número de aves menos/não motivadas no campo de grupo (indivíduos para os quais os testes pararam devido à regra de não resolver qualquer tarefa em 10 sessões consecutivas recebidas entre 10 e 13 sessões).
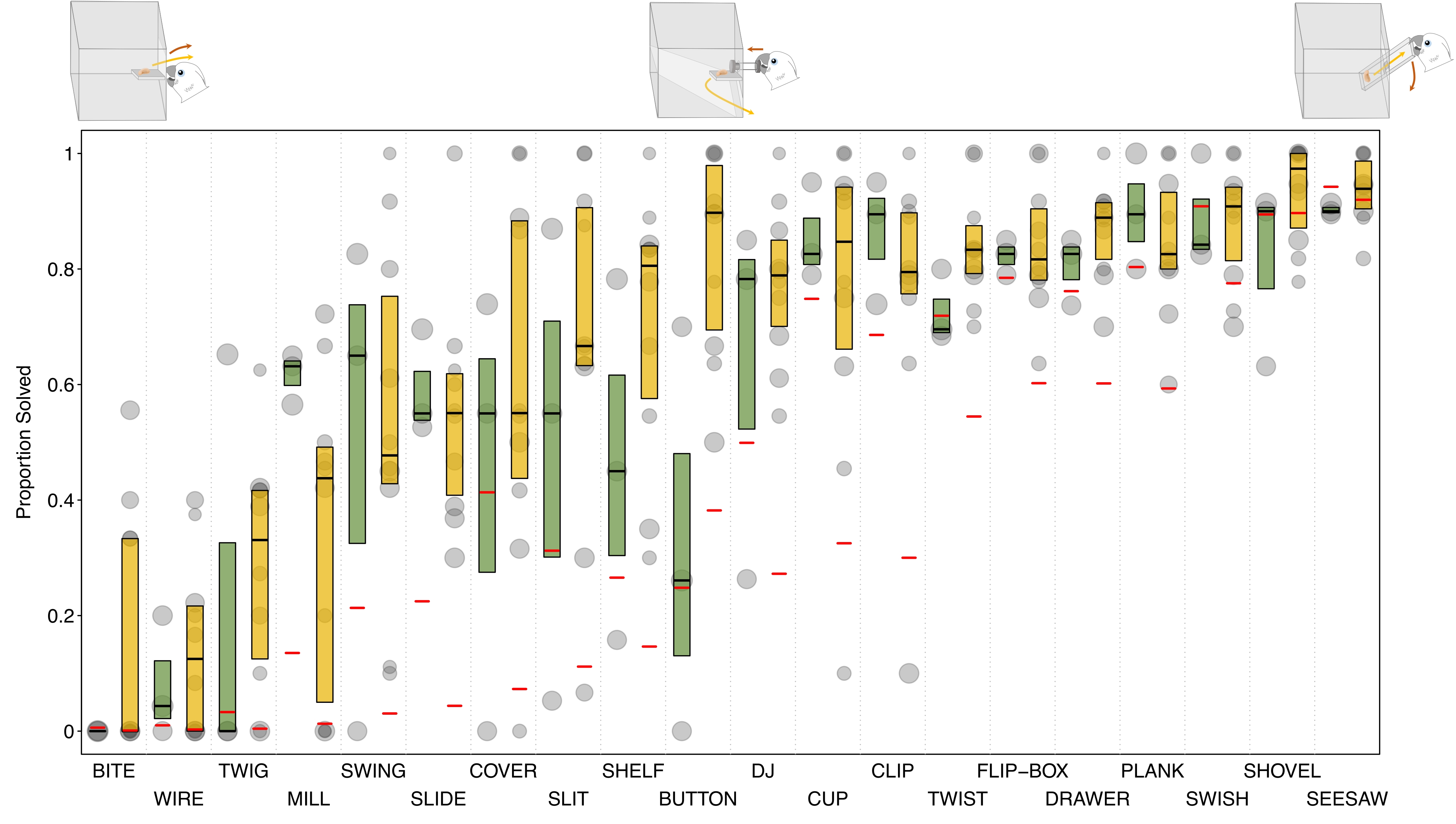
Além disso, não encontramos diferença entre os grupos em relação à dificuldade geral das tarefas (comparação do modelo completo com todas as aves incluídas, com um modelo reduzido sem inclinação aleatória do Grupo dentro da Tarefa: χ2 = 7,589, df = 5, p = 0,18). No entanto, comparações visuais de pássaros que nunca exigiram um teste motivacional, sugerem algumas diferenças na capacidade para tarefas individuais individuais (veja, por exemplo, a tarefa button na Figura 6).

Figura 6: Dados observados de sujeitos motivados e valores ajustados de modelo por tarefa e grupo: Boxplots mostram a proporção de sucessos por tarefa para ambos os grupos (verde = Campo; laranja = Laboratório). Linhas horizontais ousadas indicam valores medianos, caixas abrangem do primeiro ao terceiro quartis para aves. Boxplots ilustram dados apenas de aves motivadas (para melhorar a clareza visual). Observações individuais são retratadas por pontos (área maior indica mais observações por ponto de dados). Linhas horizontais vermelhas mostram valores ajustados. Os valores ajustados são originários de todo o conjunto de dados. Incluem-se ilustrações das tarefas Bite (inferior esquerdo), Button (superior médio) e Gangorra (canto superior direito). Publicado anteriormente em32. Clique aqui para ver uma versão maior desta figura.
{kind=link}
Esses resultados demonstram a viabilidade da metodologia para pesquisa comparativa, mesmo que os animais tenham experiências e circunstâncias ecológicas diferentes. Uma comparação de habilidades inovadoras de resolução de problemas usando apenas uma única tarefa, como a tarefa Button, pode ter dado uma falsa conclusão de que pássaros em cativeiro a longo prazo são melhores solucionadores de problemas. Essa diferença pode ser explicada pela experiência da população de laboratório com experimentos de inserção de varas, enquanto a ação motora pode não ser tão ecologicamente relevante para populações selvagens. Tais diferenças poderiam ser potencialmente mais acentuadas quando diferentes espécies são comparadas (ver19). Fomos ainda capazes de testar como a motivação afeta a capacidade de resolução de problemas, ao mesmo tempo em que comparamos os resultados dos dois grupos enquanto controlamos a motivação.
Os 20 problemas técnicos da Arena de Inovação podem, portanto, ser usados para detectar diferenças de grupos em tarefas específicas, mas também para estimar a capacidade inovadora geral dos grupos. No caso da cacatua do Goffin, ambos os grupos podem, ou seja, ter a capacidade de recuperar muitas recompensas, se quiserem, ou seja, são motivados a interagir com o aparelho.
Tabela 1: Protocolo para comportamentos de codificação: Descrição detalhada das variáveis comportamentais codificadas. Publicado anteriormente em32. Clique aqui para baixar esta Tabela.
Tabela 2: Saída do componente principal: Cargas de fatores acima de 0,40 são impressas em negrito. Publicado anteriormente em32. Clique aqui para baixar esta Tabela.
Tabela 3: Detalhes sobre assuntos e valores de comportamentos orientados por tarefas e componentes principais: Sobrescritos se as cargas de medida forem acima de 0,40 por PC. Publicado anteriormente em32. Clique aqui para baixar esta Tabela.
Tabela 4: Resultados de efeitos fixos do modelo para a probabilidade de resolver. Publicado anteriormente em32. Clique aqui para baixar esta Tabela.
Arquivo Complementar: Desenho técnico da Arena de Inovação (InnovationArena.3dm). As dimensões podem desviar-se ligeiramente. Pode ser carregado, por exemplo, em 3dviewer.net, que é um visualizador modelo 3D de código livre e aberto39. Clique aqui para baixar este Arquivo.
Discussão
A Arena de Inovação é um novo protocolo para testar a solução de problemas inovadores e técnicos. Ao projetar as tarefas da Arena de Inovação, consideramos cuidadosamente que as tarefas devem ser possíveis para resolver, dada uma série de restrições morfológicas das espécies (por exemplo, usando bicos, focinhos, patas, garras ou mãos). Para permitir que a comparabilidade mais ampla entre espécies já testadas e espécies sejam testadas no futuro, incentivamos o uso dessas tarefas, se possível com o respectivo modelo. No entanto, estamos cientes de que algumas tarefas podem precisar ser ajustadas a limites morfológicos específicos de uma espécie. Mais importante, as tarefas precisam ser novas para os sujeitos, o que pode exigir novos projetos alternativos. Uma vantagem da Arena de Inovação é que, devido ao número de tarefas diferentes, as comparações ainda serão possíveis e informativas, mesmo que algumas tarefas precisem ser ajustadas ou alteradas em estudos futuros.
Ao planejar o estudo, deve-se considerar que a fase de pré-teste (por exemplo, projetar e construir o aparelho) pode exigir um tempo considerável. Além disso, é importante habituar minuciosamente os sujeitos ao aparelho. Diferentes grupos podem diferir substancialmente em sua abordagem explorativa e reações neoticas 40,41,42. A eliminação (ou redução) das reações neofóbicas tornará as comparações mais confiáveis e permitirá que o papel da motivação seja identificado. Para medir o surgimento individual de inovações ao longo do tempo e evitar a aprendizagem social, é fundamental que os sujeitos sejam testados repetida e individualmente, o que pode ser desafiador em condições de campo. Para muitas espécies, os sujeitos capturados selvagens precisarão de muito tempo para habituar-se ao novo ambiente, à presença humana e à interação e desenvolver um procedimento de separação de trabalho. Além disso, pode não ser praticamente possível aderir rigorosamente o cronograma de randomização de cada indivíduo por sessão. Embora as cacatuas cativas de longo prazo em nosso estudo tenham sido treinadas para entrar no compartimento de teste quando chamadas pelo seu nome individual, precisávamos ser mais oportunistas em relação a qual indivíduo entra na sala de teste no campo. Além dos níveis de motivação, encontramos outro fator que poderia influenciar os resultados de um estudo comparativo utilizando a Arena de Inovação. Devido às preferências de alimentação e disponibilidade de alimentos, utilizamos diferentes tipos de recompensa para os dois grupos, o que aumentou os tempos de alimentação de cacatuas selvagens em comparação com as aves de laboratório. Contabilizamos essas diferenças adicionando a duração da alimentação (se excedeu 3 s) ao tempo total em que um indivíduo foi confrontado com a arena. Este protocolo garantiu que o tempo para interagir com a arena não fosse reduzido em um grupo devido ao tempo de alimentação. Estudos futuros devem considerar essa potencial questão e podem ter como objetivo implementar esse protocolo já em fase de habitação.
A força e a novidade deste método incluem a combinação de uma maior variedade de tarefas, apresentação simultânea dessas tarefas, múltiplas recompensas por encontro com o aparelho e exposição repetida ao aparelho para cada sujeito.
Além disso, os indivíduos são testados até que não resolvam novas tarefas. Em contraste com um número fixo de sessões, esse nível máximo (ou assintotótico) de descoberta de soluções, juntamente com o número de tarefas resolvidas por sessão, pode ser informativo sobre a potencial adaptação de um grupo a um ambiente em mudança.
Um exemplo de método alternativo é a Multi Access Box (MAB), na qual é possível resolver uma tarefa através de quatro soluções diferentes, mas apenas uma recompensa pode ser recuperada por encontro com o aparelho18 e, portanto, a estimativa da taxa de inovação ao longo do tempo é significativamente limitada. Além disso, as dificuldades com tarefas individuais, que podem ser específicas das espécies, podem influenciar fortemente a comparação das performances em relação às habilidades cognitivas. Para nosso conhecimento, a apresentação simultânea de tarefas com soluções motoricamente distintas foi limitada a um máximo de seis tarefas em estudos anteriores (Federspiel, MAB de 6 vias sobre aves de mynah, dados até agora inéditos). Embora o MAB seja uma ferramenta muito útil para descobrir técnicas de exploração, achamos que a Arena de Inovação é mais adequada para a comparação da capacidade de inovar-se. Uma gama mais ampla de tarefas, que também variam em dificuldade, pode ser mais informativa sobre uma competência técnica de resolução de problemas29.
Em nosso primeiro estudo, comparamos com sucesso dois grupos da mesma espécie, a cacatua de Goffin, que difere substancialmente em sua experiência. Com essa comparação, visamos especificamente a questão de se o cativeiro a longo prazo influencia as habilidades de resolução de problemas. Estudos anteriores sugerem que um estilo de vida cativo prolongado aumenta essas habilidades (ver30,43), mas comparações diretas através de abordagens experimentais controladas têm sido raras (mas ver44,45). Usando a Arena de Inovação, conseguimos direcionar essa questão e não encontramos apoio para um efeito de cativeiro na capacidade geral de Goffins de encontrar novas soluções, mas sim um efeito em um nível motivacional32.
Além disso, a Arena de Inovação pode ser usada para abordar questões com foco em diferentes aspectos da resolução inovadora de problemas. Outras etapas podem incluir investigações visando os efeitos da divergência e da convergência. Por exemplo, comparações entre espécies intimamente relacionadas que diferem em suas ecologies (por exemplo, espécies insulares vs. espécies não insulares), mas também espécies distantes, como um papagaio e um representante corvíduo ou espécies aviárias e primatas que anteriormente apresentaram desempenhos semelhantes na resolução de problemas físicos individuais46. A Arena de Inovação foi desenvolvida para comparar muitas espécies diferentes, mesmo aquelas que estão distantes.
Dito isto, este método poderia muito bem ser usado também para investigar diferenças inter-individuais. Por exemplo, pode-se usar pontuações de personalidade como preditores para estimar sua influência na taxa de inovação. Acreditamos que o método apresentado pode ser utilizado por grupos de pesquisa que estudam a inovação animal e humana, e/ou de forma colaborativa por laboratórios especializados no estudo de diferentes espécies.
Divulgações
Os autores não declaram conflitos de interesse.
Agradecimentos
Agradecemos a Stefan Schierhuber e David Lang por sua ajuda na produção deste vídeo, Christoph Rössler por sua ajuda com desenhos técnicos, e Poppy Lambert por revisar este manuscrito. Esta publicação foi financiada pelo Fundo Austríaco de Ciência (FWF; Projeto START Y01309 concedido à A.A.). A pesquisa apresentada foi financiada pelo Fundo Austríaco de Ciência (FWF; projetos P29075 e P29083 concedidos à A.A. e ao projeto J 4169-B29 concedido ao M.O.), bem como o Fundo de Ciência e Tecnologia de Viena (WWTF; projeto CS18-023 concedido à A.A.).
Materiais
| Name | Company | Catalog Number | Comments |
| wooden platform | Dimensions: wooden semicircle, radius approx. 1.5m | ||
| FIXATION SYSTEM | |||
| 5 x metal nut | Dimensions: M8 | ||
| 5 x rod | (possibly with U-profile) | ||
| 5 x threaded rod | Dimensions: M8; length: 25cm | ||
| 5 x wing nut | Dimensions: M8 | ||
| PUZZLE BOXES WITHOUT FUNCTION PARTS | |||
| 20 x acrylic glass back | Dimensions: 17cm x 17.5cm x 0.5cm | ||
| 20 x acrylic glass base | 4 holes for screws roughly 2cm from each side Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| 20 x acrylic glass front | acrylic glass fronts need to be cut differently for each puzzle box (see drawing) Dimensions: 17cm x 15cm x 0.5cm | ||
| 20 x acrylic glass lid | cut out 0.5cm at the edges for better fit Dimensions: trapezoid shape: 18.5cm x 16cm x 16cm x 1cm (thick) | ||
| 40 x acrylic glass side | Dimensions: 17cm x 16cm x 0.5cm | ||
| 80 x small screw | to attach bases to the platform (4 screws per base) | ||
| PARTS FOR EACH MECHANSIM PER TASK | |||
| to assemble the parts use technical drawing InnovationArena.3dm | can be loaded e.g. in 3dviewer.net, which is a free and open source 3D model viewer. github repository: https://github.com/kovacsv/Online3DViewer; please contact authors if you are in need of a different format | ||
| TASK TWIST | |||
| 5x small nut | to attach glass (punch holes) and acrylic glass cube to threaded rod | ||
| acrylic glass | Dimensions: 2cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5cm; base diameter: 3cm | ||
| thin threaded rod | Dimensions: length: approx. 10cm | ||
| TASK BUTTON | |||
| 2x nut | attach to rod; glue outer nut to rod Dimensions: M8 | ||
| acrylic glass | V-cut to facilitate sliding of rod Dimensions: 4cm x 3cm x 1cm (0.5cm V-cut in the middle) | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| threaded rod | Dimensions: M8, length: 5cm | ||
| TASK SHELF | |||
| acrylic glass top | Dimensions: 5cm x 4cm x 0.3cm | ||
| acrylic glass lower | Dimensions: 5cm x 4cm x 1cm | ||
| acrylic glass side 1 | Dimensions: 4cm x 3cm x 0.5cm | ||
| acrylic glass side 2 | Dimensions: 4.5cm x 3cm x 0.5cm | ||
| thin plastic bucket | one side cut off to fit Dimensions: diameter: approx. 4.5 cm; height: 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| TASK SLIT | room to reach in: 2cm in height | ||
| - | recommended: add small plastic barrier behind reward so it cannot be pushed further into the box | ||
| TASK CLIP | |||
| 2x acrylic glass | Dimensions: 1cm x 1cm x 2cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| peg | Dimensions: length: approx. 6 cm | ||
| thin threaded rod | Dimensions: length: approx. 6 cm | ||
| TASK MILL | |||
| 2x arylic glass triangle | Dimensions: 10cm x 7.5cm x 7.5cm; thickness: 1cm | ||
| 2x plastic disc | Dimensions: diameter: 12cm | ||
| 4x small nut | for attachment | ||
| 7x acrylic glass | Dimensions: 4.5cm x 2cm, 0.5cm | ||
| acrylic glass long | position the mill with longer acrylic glass touching lower half of the front (this way the mill can only turn in one direction) Dimensions: 6.5cm x 2cm, 0.5cm | ||
| thin threaded rod | Dimensions: length: approx. 4cm | ||
| wooden cylinder | Dimensions: diameter: 2cm | ||
| TASK SWISH | |||
| 2x acrylic glass | Dimensions: 2cm x 1cm x 1cm | ||
| 4x small nut | for attachment | ||
| acrylic glass | Dimensions: 10cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin threaded rod | Dimensions: length: approx. 7cm | ||
| wooden cylinder | Dimensions: diameter: 2cm, cut-off slantwise; longest part: 7cm, shortest part: 5cm | ||
| TASK SHOVEL | |||
| acrylic glass | Dimensions: 20cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 7.5cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 5cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SWING | |||
| 4x nut | Dimensions: M8 | ||
| acrylic glass | Dimensions: 7.5cm x 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| cord strings | Dimensions: 2x approx. 11cm | ||
| thin bent plastic | bucket to hold reward; positioned on slant | ||
| threaded rod | Dimensions: M8; length: 7cm | ||
| TASK SEESAW | |||
| 2x acrylic glass | Dimensions: 10cm x 1.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 1.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 10cm x 3cm x 0.5cm | ||
| acrylic glass | Dimensions: 4cm x 1.5cm x 1cm | ||
| small hinge | |||
| TASK PLANK | |||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin tin | bent approx. 1cm inside box Dimensions: 6.5cm x 3cm | ||
| TASK CUP | |||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5; base diameter: 3cm | ||
| TASK FLIP-BOX | |||
| 2x acrylic glass triangle | Dimensions: 7cm x 5cm x 5cm; thickness: 0.5cm | ||
| 2x acrylic glass | Dimensions: 4.5cm x 5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 7cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SLIDE | |||
| 4x acrylic glass | Dimensions: 15cm x 1cm x 0.5cm | ||
| acrylic glass door | Dimensions: 6cm x 6cm x 0.5cm | ||
| TASK DJ | |||
| 2x small nut | for attachment | ||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| plastic disc | Dimensions: diameter 12cm | ||
| thin threaded rod | Dimensions: length: approx. 3cm | ||
| TASK WIRE | |||
| acrylic glass | Dimensions: 9.5cm x 9.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 12cm x 2cm x 1cm | ||
| 2x small hinge | |||
| wire from a paperclip | |||
| TASK TWIG | |||
| 2x small hinge | |||
| acrylic glass | Dimensions: 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| white cardboard | Dimensions: 13cm x 4cm | ||
| Y-shaped twig | Dimensions: length: approx. 14cm | ||
| TASK COVER | |||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| thin plastic | Dimensions: diameter: 5cm | ||
| TASK BITE | recommended: put tape on sides of platform the keep reward from falling off | ||
| 2-3 paper clips | |||
| 2x cutout from clipboard | Dimensions: 10cm x 3cm | ||
| acrylic glass | hole in middle Dimensions: 5cm x 3cm x 1cm | ||
| toilet paper | |||
| TASK DRAWER | |||
| 2x acrylic glass | Dimensions: 5cm x 2.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 3cm x 1cm | ||
| acrylic glass | hole approx. 2 cm from front Dimensions: 5cm x 5cm x 1cm | ||
| OTHER MATERIAL | |||
| wide-angle videocamera |
Referências
- Fisher, J. The opening of milkbottles by birds. British Birds. 42, 347-357 (1949).
- Kummer, H., Goodall, J. Conditions of innovative behaviour in primates. Philosophical Transactions of the Royal Society of London. B, Biological Sciences. 308 (1135), 203-214 (1985).
- Tebbich, S., Griffin, A. S., Peschl, M. F., Sterelny, K. From mechanisms to function: an integrated framework of animal innovation. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150195 (2016).
- Reader, S. M., Laland, K. N. Social intelligence, innovation, and enhanced brain size in primates. Proceedings of the National Academy of Sciences. 99 (7), 4436-4441 (2002).
- Reader, S. M., Laland, K. N. Primate innovation: Sex, age and social rank differences. International Journal of Primatology. 22 (5), 787-805 (2001).
- Lefebvre, L., Whittle, P., Lascaris, E., Finkelstein, A. Feeding innovations and forebrain size in birds. Animal Behaviour. 53 (3), 549-560 (1997).
- Lefebvre, L., et al. Feeding innovations and forebrain size in Australasian birds. Behaviour. 135 (8), 1077-1097 (1998).
- Timmermans, S., Lefebvre, L., Boire, D., Basu, P. Relative size of the hyperstriatum ventrale is the best predictor of feeding innovation rate in birds. Brain, Behavior and Evolution. 56 (4), 196-203 (2000).
- Ducatez, S., Clavel, J., Lefebvre, L. Ecological generalism and behavioural innovation in birds: technical intelligence or the simple incorporation of new foods. Journal of Animal Ecology. 84 (1), 79-89 (2015).
- Sol, D., Lefebvre, L., Rodríguez-Teijeiro, J. D. Brain size, innovative propensity and migratory behaviour in temperate Palaearctic birds. Proceedings of the Royal Society B: Biological Sciences. 272 (1571), 1433-1441 (2005).
- Sol, D., Sayol, F., Ducatez, S., Lefebvre, L. The life-history basis of behavioural innovations. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150187 (2016).
- Griffin, A. S., Guez, D. Innovation and problem solving: A review of common mechanisms. Behavioural Processes. 109, 121-134 (2014).
- Laumer, I. B., Bugnyar, T., Reber, S. A., Auersperg, A. M. I. Can hook-bending be let off the hook? Bending/unbending of pliant tools by cockatoos. Proceedings of the Royal Society B. Biological Sciences. 284 (1862), 20171026 (2017).
- Rutz, C., Sugasawa, S., Vander Wal, J. E. M., Klump, B. C., St Clair, J. J. H. Tool bending in New Caledonian crows. Royal Society Open Science. 3 (8), 160439 (2016).
- Weir, A. A. S., Kacelnik, A. A New Caledonian crow (Corvus moneduloides) creatively re-designs tools by bending or unbending aluminium strips. Animal Cognition. 9 (4), 317-334 (2006).
- Herrmann, E., Hare, B., Call, J., Tomasello, M. Differences in the cognitive skills of bonobos and chimpanzees. PloS One. 5 (8), 12438 (2010).
- Herrmann, E., Call, J., Hernández-Lloreda, M. V., Hare, B., Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science. 317 (5843), 1360-1366 (2007).
- Auersperg, A. M. I., Gajdon, G. K., von Bayern, A. M. P. A new approach to comparing problem solving, flexibility and innovation. Communicative & Integrative Biology. 5 (2), 140-145 (2012).
- Auersperg, A. M. I., von Bayern, A. M. P., Gajdon, G. K., Huber, L., Kacelnik, A. Flexibility in problem solving and tool use of Kea and New Caledonian crows in a multi access box paradigm. PLoS One. 6 (6), 20231 (2011).
- Daniels, S. E., Fanelli, R. E., Gilbert, A., Benson-Amram, S. Behavioral flexibility of a generalist carnivore. Animal Cognition. 22 (3), 387-396 (2019).
- Johnson-Ulrich, L., Holekamp, K. E., Hambrick, D. Z. Innovative problem-solving in wild hyenas is reliable across time and contexts. Scientific Reports. 10 (1), 13000 (2020).
- Johnson-Ulrich, L., Johnson-Ulrich, Z., Holekamp, K. Proactive behavior, but not inhibitory control, predicts repeated innovation by spotted hyenas tested with a multi-access box. Animal Cognition. 21 (3), 379-392 (2018).
- Williams, D. M., Wu, C., Blumstein, D. T. Social position indirectly influences the traits yellow-bellied marmots use to solve problems. Animal Cognition. 24 (4), 829-842 (2021).
- Cooke, A. C., Davidson, G. L., van Oers, K., Quinn, J. L. Motivation, accuracy and positive feedback through experience explain innovative problem solving and its repeatability. Animal Behaviour. 174, 249-261 (2021).
- Huebner, F., Fichtel, C. Innovation and behavioral flexibility in wild redfronted lemurs (Eulemur rufifrons). Animal Cognition. 18 (3), 777-787 (2015).
- Godinho, L., Marinho, Y., Bezerra, B. Performance of blue-fronted amazon parrots (Amazona aestiva) when solving the pebbles-and-seeds and multi-access-box paradigms: ex situ and in situ experiments. Animal Cognition. 23 (3), 455-464 (2020).
- Bouchard, J., Goodyer, W., Lefebvre, L. Social learning and innovation are positively correlated in pigeons (Columba livia). Animal Cognition. 10 (2), 259-266 (2007).
- Griffin, A. S., Diquelou, M., Perea, M. Innovative problem solving in birds: a key role of motor diversity. Animal Behaviour. 92, 221-227 (2014).
- Webster, S. J., Lefebvre, L. Problem solving and neophobia in a columbiform-passeriform assemblage in Barbados. Animal Behaviour. 62 (1), 23-32 (2001).
- Haslam, M. 34;Captivity bias" in animal tool use and its implications for the evolution of hominin technology. Philosophical Transactions of the Royal Society B: Biological Sciences. 368 (1630), 20120421 (2013).
- Lambert, M. L., Jacobs, I., Osvath, M., von Bayern, A. M. P. Birds of a feather? Parrot and corvid cognition compared. Behaviour. , 1-90 (2018).
- Rössler, T., et al. Using an Innovation Arena to compare wild-caught and laboratory Goffin´s cockatoos. Scientific Reports. 10 (1), 8681 (2020).
- Laumer, I. B., Bugnyar, T., Auersperg, A. M. I. Flexible decision-making relative to reward quality and tool functionality in Goffin cockatoos (Cacatua goffiniana). Scientific Reports. 6, 28380 (2016).
- Friard, O., Gamba, M. BORIS: a free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- R. Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. , (2020).
- McCullagh, P., Nelder, J. A. Generalized linear models. Monographs on Statistics and Applied Probability. , (1989).
- Forstmeier, W., Schielzeth, H. Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner's curse. Behavioral Ecology and Sociobiology. 65 (1), 47-55 (2011).
- Kaiser, H. F. The application of electronic computers to factor analysis. Educational and Psychological Measurement. 20 (1), 141-151 (1960).
- . Online 3D Viewer Available from: https://github.com/lovacsv/Online3DViewer (2021)
- Greenberg, R. S., Mettke-Hofmann, C. Ecological aspects of neophobia and neophilia in birds. Current Ornithology. 16, 119-169 (2001).
- Mettke-Hofmann, C., Winkler, H., Leisler, B. The Significance of Ecological Factors for Exploration and Neophobia in Parrots. Ethology. 108 (3), 249-272 (2002).
- O'Hara, M., et al. The temporal dependence of exploration on neotic style in birds. Scientific Reports. 7 (1), 4742 (2017).
- Chevalier-Skolnikoff, S., Liska, J. O. Tool use by wild and captive elephants. Animal Behaviour. 46 (2), 209-219 (1993).
- Benson-Amram, S., Weldele, M. L., Holekamp, K. E. A comparison of innovative problem-solving abilities between wild and captive spotted hyaenas, Crocuta crocuta. Animal Behaviour. 85 (2), 349-356 (2013).
- Gajdon, G. K., Fijn, N., Huber, L. Testing social learning in a wild mountain parrot, the kea (Nestor notabilis). Animal Learning and Behavior. 32 (1), 62-71 (2004).
- Shettleworth, S. J. . Cognition, Evolution, and Behavior. , (2009).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados