
Method Article
El campo de la innovación: un método para comparar la resolución innovadora de problemas entre grupos
En este artículo
Resumen
El Innovation Arena es un método comparativo novedoso para estudiar la tasa de innovación técnica por unidad de tiempo en animales. Se compone de 20 tareas diferentes de resolución de problemas, que se presentan simultáneamente. Las innovaciones se pueden llevar a cabo libremente y la configuración es robusta con respecto a las predisposiciones a nivel individual, poblacional o de especie.
Resumen
Las tareas de resolución de problemas se utilizan comúnmente para investigar el comportamiento técnico e innovador, pero una comparación de esta capacidad en una amplia gama de especies es una tarea desafiante. Las predisposiciones específicas, como el conjunto de herramientas morfológicas de una especie o las técnicas de exploración, pueden influir sustancialmente en el rendimiento en tales tareas, lo que dificulta las comparaciones directas. El método presentado aquí fue desarrollado para ser más robusto con respecto a tales diferencias específicas de la especie: el Innovation Arena presenta 20 tareas diferentes de resolución de problemas. Todas las tareas se presentan simultáneamente. Los sujetos se enfrentan al aparato repetidamente, lo que permite medir la aparición de innovaciones a lo largo del tiempo, un siguiente paso importante para investigar cómo los animales pueden adaptarse a las condiciones ambientales cambiantes a través de un comportamiento innovador.
Cada individuo fue probado con el aparato hasta que dejó de descubrir soluciones. Después de que concluyeron las pruebas, analizamos las grabaciones de video y codificamos la recuperación exitosa de recompensas y múltiples comportamientos dirigidos por aparatos. Estos últimos se analizaron mediante un Análisis de Componentes Principales y los componentes resultantes se incluyeron en un Modelo Mixto Lineal Generalizado junto con el número de sesión y la comparación de grupos de interés para predecir la probabilidad de éxito.
Utilizamos este enfoque en un primer estudio para abordar la cuestión de si el cautiverio a largo plazo influye en la capacidad de resolución de problemas de una especie de loro conocida por su comportamiento innovador: la cacatúa de Goffin. Se encontró un efecto en el grado de motivación, pero no hubo diferencias en la capacidad de resolución de problemas entre los grupos cautivos a corto y largo plazo.
Introducción
Una gran teta (Parus major) se enfrenta a una botella de leche, pero no puede acceder a la leche directamente ya que la botella está cerrada por un papel de aluminio. Encuentra una solución a este problema picoteando a través de la lámina para que pueda beber la crema. Esta situación describe uno de los ejemplos más conocidos de innovación animal1.
Resolver tales problemas puede ser ventajoso, especialmente en entornos que están sujetos a cambios frecuentes. Kummer y Goodall2 han definido ampliamente la innovación como encontrar "una solución a un problema novedoso, o una solución novedosa a uno antiguo". Una definición más detallada de innovación fue postulada por Tebbich y sus colegas3 como "el descubrimiento de una nueva interacción conductual con el entorno social o físico, aprovechando una oportunidad existente y / o creando una nueva oportunidad".
Presenciar innovaciones espontáneas exige observaciones exhaustivas y lentas, lo que a menudo no es factible en un marco que incluye una amplia variedad de especies. Para hacer frente a este desafío, los investigadores han realizado rigurosas revisiones bibliográficas para estimar la tasa de innovación 4,5 y han descubierto correlaciones entre la propensión a innovar y otros factores como las medidas neurológicas 6,7,8 y la ecología de la alimentación 9,10,11 . Las pruebas experimentales, sin embargo, pueden provocar un comportamiento innovador en un entorno controlado. Por esta razón, el rendimiento en tareas técnicas de resolución de problemas se utiliza a menudo como un indicador de las capacidades innovadoras en los animales (véase la revisión en12).
Se han utilizado una variedad de enfoques diferentes para investigar la resolución innovadora de problemas: por ejemplo, se pueden comparar diferentes grupos de animales por su desempeño en una tarea en particular. Tales estudios generalmente se dirigen a innovaciones específicas o habilidades cognitivas (por ejemplo, comportamiento de flexión de gancho; ver 13,14,15). Esto permite a los investigadores obtener información detallada dentro de un contexto específico, pero la interpretación de cualquier similitud o diferencia está limitada por la naturaleza de la tarea, lo que podría requerir una fuerza innovadora diferente de diferentes grupos (como se discutió en13,14).
Otros estudios han implementado una serie de tareas consecutivas16,17. Este método permite comparar el rendimiento en múltiples tareas y estimar la competencia general dentro de dominios específicos. Una limitación de tales estudios, sin embargo, está en la presentación sucesiva de las diferentes tareas, lo que no permite una investigación de la aparición de innovaciones a lo largo del tiempo.
Otro enfoque es ofrecer simultáneamente diferentes opciones de acceso a una sola recompensa. Esto se logra con frecuencia mediante el uso de la Caja de Acceso Múltiple (MAB)18,19,20,21,22,23,24,25,26, donde una recompensa se coloca en el centro de una caja de rompecabezas y es recuperable a través de cuatro soluciones diferentes. Una vez que la misma solución se usa de manera consistente, se bloquea y el animal necesita cambiar a otra solución para acceder a la recompensa. A través de un experimento de este tipo, se pueden detectar y contabilizar las preferencias entre las especies y dentro de ellas, pero aún así se limita la expresión del comportamiento innovador a una solución por ensayo 18,19,20,21. En otros estudios, a los animales también se les han presentado aparatos que contienen múltiples soluciones al mismo tiempo, cada una con recompensas separadas. Esto permite múltiples innovaciones dentro de una sola prueba, pero, hasta ahora, las tareas se han limitado en gran medida a unas pocas soluciones motoramente distintas. Dado que no fue el foco de estos estudios, las configuraciones experimentales no implicaron exposiciones repetidas al aparato, lo que permitiría una medida de la tasa de innovación por unidad de tiempo 27,28,29.
Aquí presentamos un método que, además de otros enfoques, puede ayudarnos en el objetivo de comparar diferentes especies en sus innovadoras habilidades de resolución de problemas. Desarrollamos una gama más amplia de tareas dentro de una sola configuración, que se espera que difieran en dificultad por grupo o especie. Por lo tanto, es menos probable que las disparidades específicas de la tarea influyan en la probabilidad general de encontrar soluciones. Además, presentamos todas las tareas de forma simultánea y repetida para medir la aparición de innovaciones a lo largo del tiempo. Esta medida tiene el potencial de mejorar nuestra comprensión sobre el valor adaptativo del comportamiento innovador.
Un primer estudio que utiliza este método ha investigado si el cautiverio a largo plazo influye en las capacidades de resolución de problemas (como sugiere el llamado efecto cautiverio; ver30) de la cacatúa de Goffin (Cacatua goffiniana; en adelante: Goffins), una especie modelo aviar para la innovación técnica (revisado en31).
Protocolo
Este estudio fue aprobado por el Comité de Ética y Bienestar Animal de la Universidad de Medicina Veterinaria de Viena de acuerdo con las directrices de buenas prácticas científicas y la legislación nacional. El experimento fue puramente apetecible y estrictamente no invasivo y, por lo tanto, se clasificó como un experimento no animal de acuerdo con la Ley de Experimentos con Animales de Austria (TVG 2012). La parte del experimento realizada en Indonesia fue aprobada por el Ministerio de Investigación, Tecnología y Educación Superior (RISTEK) sobre la base de una reunión del Equipo Coordinador de Permisos de Investigador Extranjero (10/TKPIPA/E5/Dit.KI/X/2016) que otorgó los permisos para realizar esta investigación a M.O. (410/SIP/FRP/E5/Dit.KI/XII/2016) y B.M. (411/SIP/FRP/E5/Dit.KI/XII/2016).
1. Condiciones previas/requisitos previos
- Básico
- Asegúrese de que los sujetos puedan ser identificados individualmente. Las especies de estudio pueden tener patrones individuales distintos o los individuos pueden ser marcados (por ejemplo, con anillos de color o pintura no tóxica).
NOTA: Para obtener más información sobre el anillamiento, así como la captura y liberación de Goffins silvestres, consulte Procedimiento de captura-liberación en Información suplementaria de32. - Asegúrese de que haya una sala visualmente ocluida disponible para las pruebas para evitar el aprendizaje social entre los sujetos.
- Identifique una recompensa altamente preferida para la especie y el grupo de estudio probando múltiples golosinas diferentes disponibles (ver33 o Prueba de preferencia de alimentos en Información suplementaria de referencia32).
- Considere si el tiempo de alimentación difiere sustancialmente entre los grupos. Si es así, considere un protocolo que garantice que el tiempo de alimentación no reduzca en gran medida el tiempo disponible para resolver tareas para uno de los grupos (consulte el paso 4.8 para obtener más información).
NOTA: En este estudio, hubo una preferencia del grupo cautivo a largo plazo por los anacardos y por el maíz seco en el grupo cautivo a corto plazo.
- Asegúrese de que los sujetos puedan ser identificados individualmente. Las especies de estudio pueden tener patrones individuales distintos o los individuos pueden ser marcados (por ejemplo, con anillos de color o pintura no tóxica).
- Diseñando el Campo de la Innovación
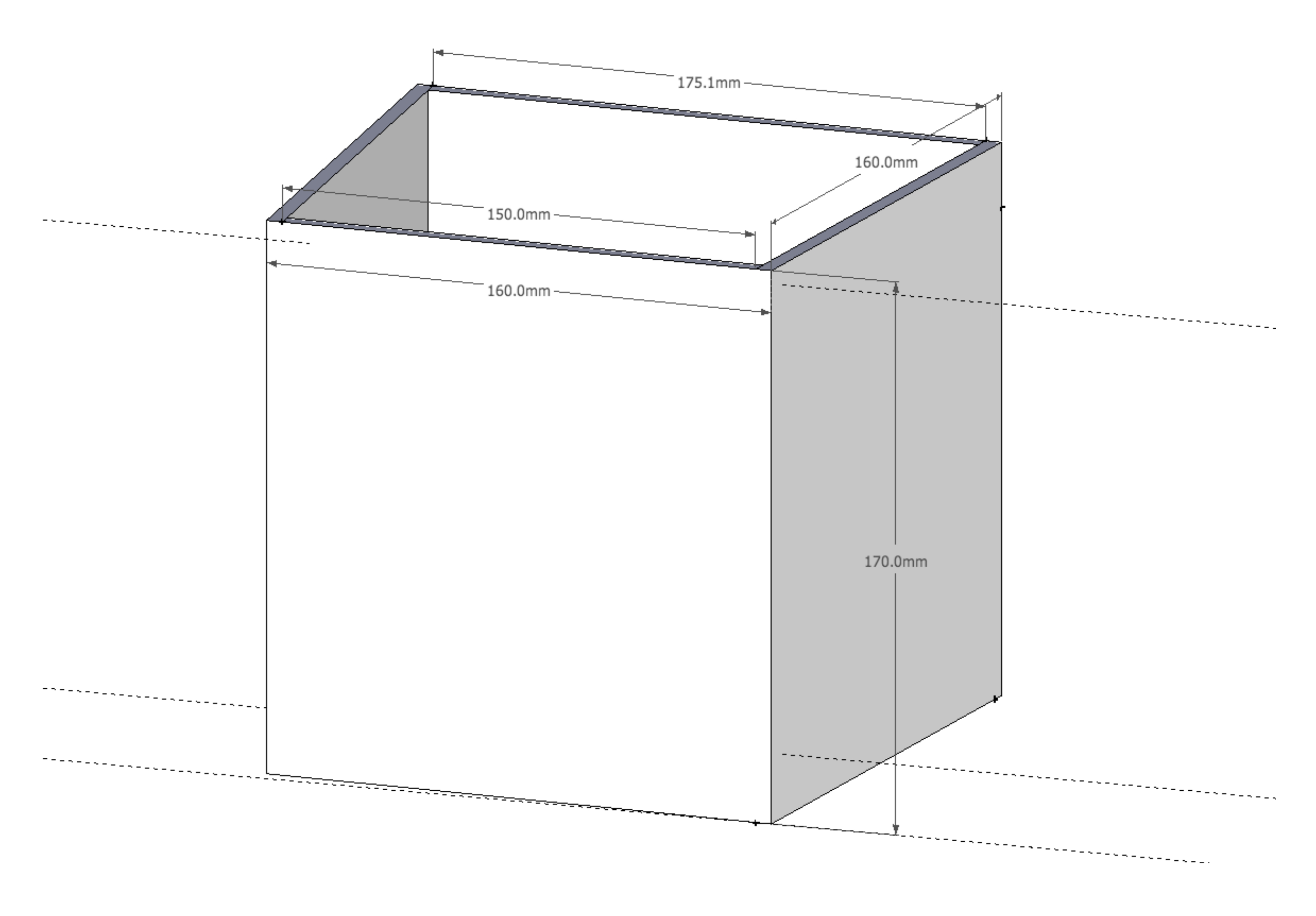
NOTA: El aparato completo, es decir, el Innovation Arena, consta de 20 cajas de rompecabezas diferentes, dispuestas en un semicírculo sobre una plataforma de madera.- Diseñar el esquema básico de las cajas en un tamaño aplicable a las especies de estudio. Use cajas transparentes con forma trapezoidal (para una fácil alineación en un semicírculo), tapas extraíbles (para permitir el cebo entre sesiones) y bases desmontables (consulte la Figura 1).
NOTA: Cada base permanecerá más tarde en una posición permanente, mientras que el resto de las cajas cambiarán de posición. En el estudio presentado, se eligió el tamaño de las cajas para asegurar que cada rompecabezas sea fácilmente accesible por las cacatúas. Las dimensiones se pueden ajustar para cada especie de estudio. - Diseña una plataforma para contener las 20 cajas de rompecabezas.
- Diseñar un sistema de fijación que mantenga las tapas de las cajas en su lugar durante las pruebas y, por lo tanto, no pueda ser retirado por los sujetos durante las sesiones de prueba.
NOTA: Tiene que ser desmontable del aparato, ya que las tapas de las cajas deben quitarse para el cebo. - Para el frente de cada caja, diseñe 20 tareas diferentes, cada una de las cuales constituirá un desafío técnico diferente (ver Figura 2).
NOTA: Las tareas para este experimento fueron diseñadas con el objetivo de que las soluciones caigan dentro del rango morfológico de muchas especies diferentes. Para la fuerza comparativa, sería ideal utilizar tareas lo más similares posible a estas, pero tenga en cuenta que es aún más importante que las tareas sean novedosas para los sujetos. Consulte la Tabla de materiales para obtener medidas exactas y el Dibujo técnico complementario para obtener una ilustración más detallada de las tareas. - Adquirir todo el material necesario para el aparato.
- Asegúrese de tener una cámara gran angular, un software de codificación (recomendado, por ejemplo, Behavioral Observation Research Interactive Software, BORIS34) y un software para el análisis estadístico (recomendado, por ejemplo, R35).
NOTA: Para los estudios de campo, idealmente, diseñe la arena antes de partir hacia el sitio de estudio y traiga la mayor cantidad posible del equipo esencial, como el vidrio acrílico precortado.
- Diseñar el esquema básico de las cajas en un tamaño aplicable a las especies de estudio. Use cajas transparentes con forma trapezoidal (para una fácil alineación en un semicírculo), tapas extraíbles (para permitir el cebo entre sesiones) y bases desmontables (consulte la Figura 1).

Figura 1: Diagrama de un cuadro básico de tres caras. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 2: Tareas del Innovation Arena con una descripción correspondiente de la acción motora requerida para resolver ( = recompensa; las flechas rojas indican las direcciones de las acciones requeridas para resolver tareas; las flechas amarillas indican las trayectorias de recompensa). Las tareas se organizan de acuerdo con su dificultad media (de izquierda a derecha, de arriba a abajo). Publicado anteriormente en32. Haga clic aquí para ver una versión más grande de esta figura.
= recompensa; las flechas rojas indican las direcciones de las acciones requeridas para resolver tareas; las flechas amarillas indican las trayectorias de recompensa). Las tareas se organizan de acuerdo con su dificultad media (de izquierda a derecha, de arriba a abajo). Publicado anteriormente en32. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
2. Preparativos
- Pegue tres lados de las cajas: izquierdo, posterior y derecho, pero no el frente, la parte superior y la base.
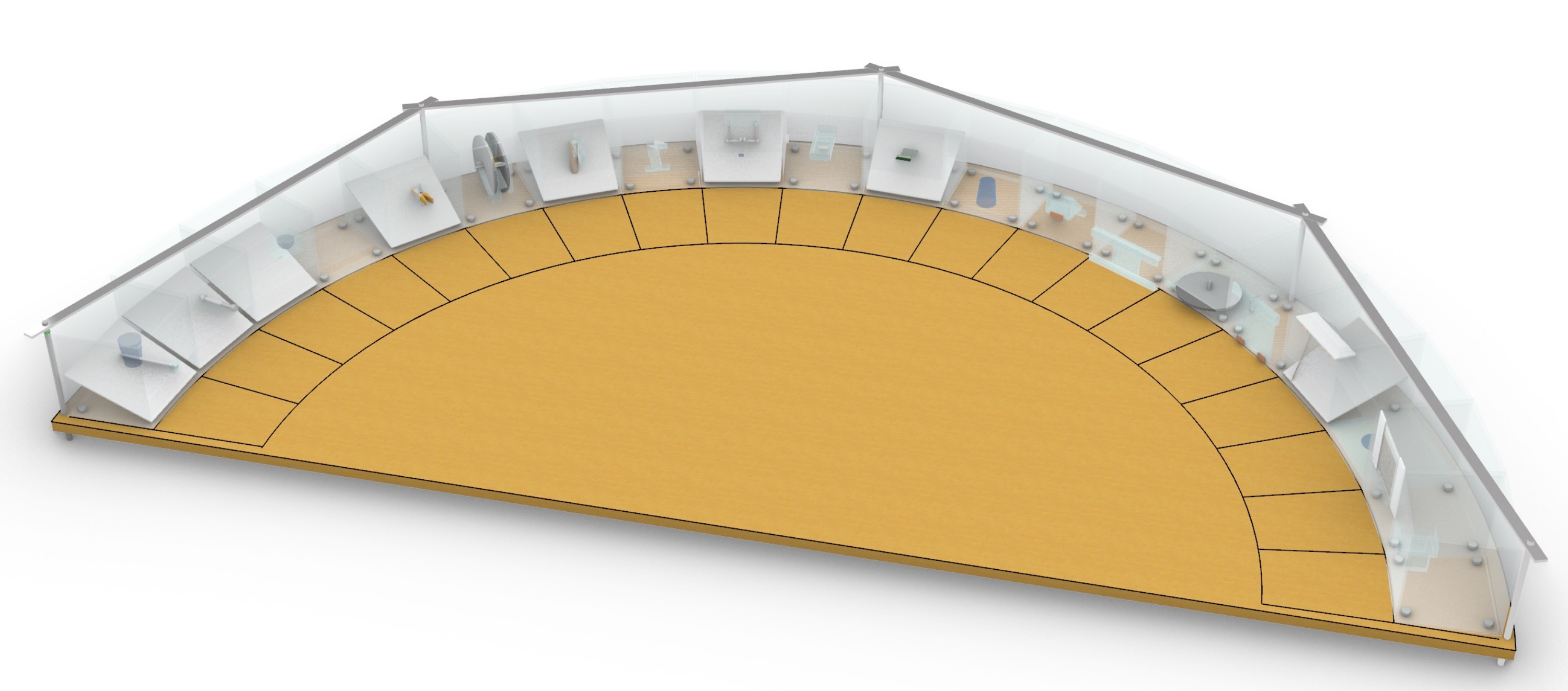
- Coloque cada caja de tres lados en la parte superior de cada base y alinee uniformemente en un semicírculo en la plataforma (Figura 3). La sección frontal de cada caja debe estar a 1 m del centro.
NOTA: Los mecanismos que constituyen la tarea (caras frontales de las cajas y posibles contenidos) se añadirán en un momento posterior durante el experimento. - Dibuje una línea de cada caja de 20 cm hacia el centro de la arena y conecte las líneas, lo que resulta en una cuadrícula de proximidad (Figura 3).
NOTA: Dependiendo del tamaño de la especie de estudio, una distancia diferente podría ser más apropiada. Para el estudio presentado aquí, se eligieron 20 cm, ya que es aproximadamente la longitud de un Goffin (excluidas las plumas de la cola). - Retire todo excepto las bases de las cajas y colóquelas permanentemente a la plataforma. Esto asegurará que las cajas permanezcan en su lugar durante el experimento.
- Coloque una cámara gran angular en el techo sobre la arena.
- Preparar un cronograma para la posición de cada casilla por sesión y tema. Cada sujeto siempre se enfrentará con todas las casillas, pero con una nueva disposición en cada sesión. La ubicación (posiciones 1 a 20) de cada tarea debe asignarse aleatoriamente con la restricción de que ninguna casilla esté en la misma posición dos veces por sujeto.
NOTA: Esta es la situación ideal. Si no se puede planificar el orden de prueba de los sujetos (lo cual es más probable en los estudios de campo), esta limitación de aleatorización (no hay casilla en la misma posición dos veces) entre sesiones (pero no dentro de la asignatura) debe ser suficiente.

Figura 3: El campo de la innovación. Tareas dispuestas en un semicírculo; las posiciones de las 20 tareas son intercambiables. Una rejilla de proximidad (20 cm delante de cada caja) está marcada en negro. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
3. Habituación
NOTA: El propósito de la habituación es reducir las influencias de las reacciones neofóbicas hacia la arena. Asegurar un nivel mínimo de habituación para todos los sujetos a través de un procedimiento de habituación que requiere que cada individuo alcance dos criterios.
- Habituación a la arena no funcional (hasta el criterio I)
- Coloque todas las cajas de tres lados en las bases, agregue la tapa de cada caja y manténgalas en su lugar con el sistema de fijación (sin el sujeto presente).
NOTA: Considere habituar a los sujetos en etapas que sean apropiadas para cada especie, por ejemplo, agregando gradualmente más cajas a la plataforma, presentando la arena en su área de origen, colocando recompensas en cualquier posición de la plataforma, como alrededor, en la parte superior y con las cajas o confrontarlos con el aparato en grupos más grandes primero y minimizar gradualmente el tamaño del grupo. - Familiarice a los sujetos con elementos separados de las tareas que podrían provocar reacciones neofóbicas.
NOTA: Estos elementos separados (es decir, todo menos las cajas básicas, la plataforma y el sistema de fijación) no deben combinarse en mecanismos funcionales en esta etapa. - Coloque una recompensa dentro de la caja (centro). Lleve el sujeto al compartimento.
- Espere la duración de una sesión sin interferir. Ahora se supone que los sujetos deben comer las recompensas.
NOTA: La duración de estas sesiones de habituación difirió en el experimento: las aves cautivas a largo plazo recibieron 10 minutos, mientras que las cacatúas cautivas a corto plazo tuvieron 20 minutos para comer las recompensas. Esto era necesario para tener en cuenta un tiempo de alimentación sustancialmente más largo debido a los diferentes tipos de recompensa. Este problema se solucionó de manera diferente más adelante en las sesiones de prueba (consulte el paso 4.8). - Repita para cada asignatura (una sesión por día de prueba) hasta que se alcance el criterio: cada individuo consume todas las recompensas de las cajas de tres lados (una recompensa por caja) dentro de tres sesiones consecutivas mientras se aísla visualmente del grupo.
- Coloque todas las cajas de tres lados en las bases, agregue la tapa de cada caja y manténgalas en su lugar con el sistema de fijación (sin el sujeto presente).
- Habituación a la arena funcional (hasta el criterio II)
- Pega y fija permanentemente todos los elementos necesarios a las cajas para hacerlas cajas de rompecabezas funcionales.
NOTA: En este punto, la arena es completamente funcional como en las sesiones de prueba. - Coloque las cajas al azar en la plataforma (las bases las mantendrán en su lugar) y asegure las tapas a las cajas.
- Coloque una recompensa en la tapa de cada caja en el borde más cercano al centro de la arena.
- Lleve el sujeto al compartimento.
- Espere la duración de una sesión sin interferir.
NOTA: Se supone que los sujetos ahora deben comer las recompensas. - Repetir para cada asignatura (una sesión por día de prueba) hasta que se alcance el criterio.
NOTA: Criterio II: El individuo consume todas las recompensas de la parte superior de las cajas de rompecabezas funcionales (una recompensa por caja) dentro de una sesión mientras se aísla visualmente del grupo. Este criterio II asegurará que los sujetos no tengan miedo de la arena, incluso cuando se adjunten nuevas partes. Sin embargo, no deben interactuar con los mecanismos y deben interrumpirse si lo hacen.
- Pega y fija permanentemente todos los elementos necesarios a las cajas para hacerlas cajas de rompecabezas funcionales.
4. Pruebas
- Coloque las cajas en la plataforma de acuerdo con el cronograma de aleatorización.
- Ceba cada tarea en el lugar apropiado dentro de las cajas (ver Figura 2).
NOTA: La ubicación exacta de cada recompensa depende de la tarea específica y se puede ver en el video. - Fije las tapas a las cajas y asegúrelas con el sistema de fijación (para asegurarse de que los sujetos no puedan arrancarlas).
- Separe un sujeto individual y llévelo al compartimento de prueba. Los sujetos se evalúan de uno en uno para evitar la interferencia del aprendizaje social.
- Colóquelos en la posición inicial (es decir, el punto que está a la misma distancia de todas las tareas en el centro de la plataforma) o coloque un incentivo (por ejemplo, una recompensa) en la posición inicial para garantizar que el tema comience allí.
- Inicie el temporizador y espere 20 minutos (duración de la sesión) sin interferir o interactuar con el sujeto. El sujeto puede resolver tantas tareas como sea posible.
- Si el sujeto se distrae con objetos no relacionados con el aparato, el experimentador puede colocarlos de nuevo en la posición inicial de la arena (si es posible).
- Si el sujeto se alimenta durante más de 3 s de la recompensa, detenga el temporizador, espere hasta que finalice la alimentación y luego reanude el tiempo.
NOTA: Esto se hace para garantizar que el tiempo máximo disponible para resolver tareas no se reduzca por el tiempo de alimentación y, por lo tanto, sea igual para ambos grupos. - Si el sujeto no interactúa con ninguna tarea dentro de los primeros 3 min y tampoco está agitado, aplique un protocolo de motivación (ver sección 5).
- Una vez transcurridos los 20 min (duración máxima de una sesión) o el participante ha resuelto todas las tareas, el sujeto se realiza con las pruebas del día y se puede liberar de nuevo en la zona de origen.
- El siguiente día de prueba, repita este procedimiento.
- Continúe probando cada individuo hasta que no resuelva ninguna tarea nueva en las últimas cinco sesiones o no resuelva ninguna tarea en absoluto en 10 sesiones consecutivas.
5. Protocolo de motivación
NOTA: Como se describió anteriormente (paso 4.9), se puede implementar un protocolo motivacional si un individuo no interactúa con ninguna tarea dentro de los primeros 3 minutos de una sesión.
- Coloque tres recompensas en la parte superior de las cajas (elija una caja en el lado izquierdo, medio y derecho para esto). Si el sujeto comienza a interactuar con cualquier tarea 3 minutos después de consumir las recompensas, reanude la sesión (la duración de 20 minutos comienza en este punto).
- De lo contrario, coloque cinco recompensas dispersas en la línea de aproximación (es decir, cuadrícula de proximidad). Si el sujeto comienza a interactuar con cualquier tarea 3 minutos después de consumir las recompensas, reanude la sesión (la duración de 20 minutos comienza en este punto).
- De lo contrario, coloque cinco recompensas en la posición inicial. Si el sujeto comienza a interactuar con cualquier tarea 3 minutos después de consumir las recompensas, reanude la sesión (el marco de tiempo de 20 minutos comienza en este punto).
- De lo contrario, coloque un puñado de recompensas en la posición inicial y termine la sesión de prueba para este día (pero dele al sujeto algo de tiempo para consumir las recompensas).
6. Análisis
- Codificación conductual
- Antes de analizar los videos, examine el protocolo de codificación en detalle (Tabla 1) y considere si los ajustes son necesarios para la especie que se está probando.
NOTA: Las descripciones de las variables de codificación deben ser lo más específicas posible para evitar diferencias de codificación entre varios investigadores. - Anotar eventos puntuales de: Número de tareas diferentes tocadas (TasksTouched; Tenga en cuenta que el número máximo de tareas tocadas es 20), el número de tareas resueltas (Tareas resueltas), el contacto con tareas cebadas (BaitedContact) y el contacto con tareas resueltas (SolvedContact).
- Anote las duraciones de la latencia hasta que el sujeto cruce la frontera exterior de la línea de cuadrícula (LatencyGrid) y el tiempo pasado dentro de la cuadrícula (GridTime).
- Antes de analizar los videos, examine el protocolo de codificación en detalle (Tabla 1) y considere si los ajustes son necesarios para la especie que se está probando.
- Análisis estadístico
- Determine si las medidas para los comportamientos dirigidos por aparatos (LatencyGrid, GridTime, TasksTouched, BaitedContact, SolvedContact) están correlacionadas.
- En caso afirmativo, extraiga los componentes principales mediante un análisis de componentes principales antes de incluirlos en el modelo como predictores.
- Si no están correlacionados, inclúyalos por separado en el modelo como predictores.
- Ejecute un modelo mixto lineal generalizado con estructura de error binomial y función de enlace logit36. Para predecir la probabilidad de éxito (es decir, la variable de respuesta es SolvedTasks), ajuste el modelo con una estructura de pendiente aleatoria máxima e incluya intercepciones aleatorias para sujeto, tarea, un factor combinado de sujeto y sesión (SessionID) y un factor combinado de sujeto y tarea (Subj.Task) para evitar la pseudoreplicación. Utilice la comparación de interés (por ejemplo, especies) y los componentes principales como variables predictoras y de control para la sesión. Considere las posibles interacciones.
- Para evitar pruebas múltiples crípticas37 , primero compare el modelo con un modelo que carezca de todos los efectos fijos de interés antes de probar predictores individuales.
- Para probar una diferencia general de dificultad en las tareas entre grupos, compare el modelo (completo) con uno que carezca de la pendiente aleatoria del grupo dentro de la tarea.
Resultados
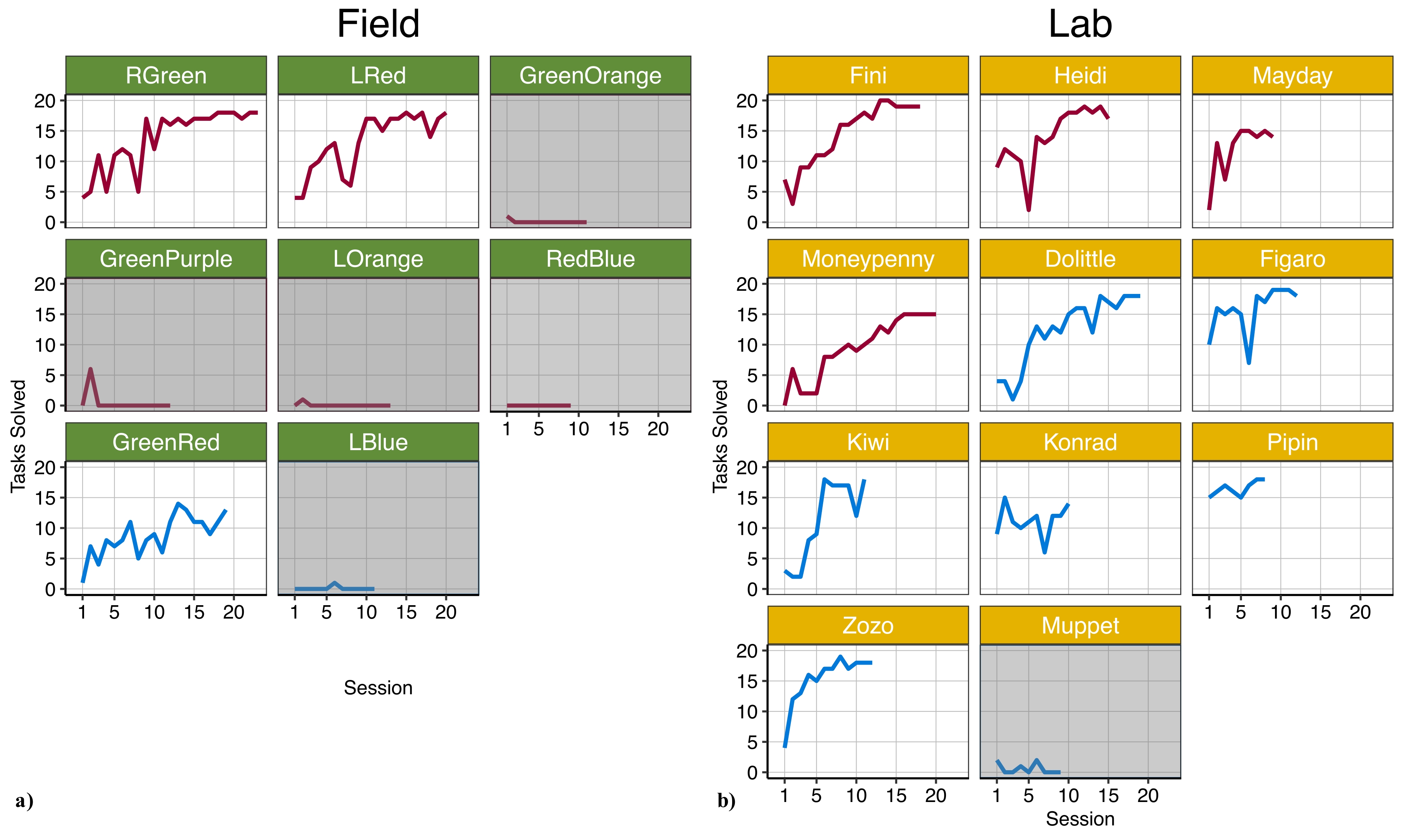
Diecinueve sujetos fueron evaluados utilizando el Innovation Arena: 11 cacatúas cautivas a largo plazo y 8 a corto plazo (Figura 4).

Figura 4: Una visión general del número de tareas resueltas por sesión para cada individuo. a) Grupo de campo, b) Grupo de laboratorio. Líneas rojas = hembra; líneas azules = macho. Los sujetos que recibieron el protocolo motivacional debido a su renuencia a interactuar con el aparato se clasificaron como no motivados y representados con un fondo gris. Publicado anteriormente en Información Complementaria de32. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
El análisis de componentes principales dio como resultado que dos componentes tuvieran valores propios por encima del criterio38 de Kaiser (véase la Tabla 2 para la salida de PCA). PC1 se carga en la frecuencia de los contactos con las tareas, el tiempo que se pasa cerca (es decir, dentro de la cuadrícula) de las tareas y el número de tareas tocadas. PC2 se vio afectado positivamente por el número de contactos con tareas ya resueltas y negativamente con el número de tareas tocadas, no resueltas. Tales comportamientos dirigidos a tareas se utilizan con frecuencia para medir la motivación (ver12 para una revisión). Por lo tanto, utilizamos PC1 y PC2 como medidas cuantitativas para la motivación para interactuar con el aparato en nuestro modelo. Juntos explicaron el 76,7% de la varianza en los comportamientos dirigidos por aparatos y ambos, así como la sesión, influyeron significativamente en la probabilidad de resolver tareas (PC1: estimación = 2,713, SE ± 0,588, χ2 = 28,64, p < 0,001; PC2: estimación = 0,906, SE ± 0,315, χ2 = 9,106, p = 0,003; sesión: estimación = 1,719, SE ± 0,526, χ2 = 6,303, p = 0,001; ver Figura 5; véase el cuadro 4).

Figura 5: Influencia de los predictores de control sobre la probabilidad de resolver: (a ) PC1, (b) PC2, (c) Sesión. Los puntos muestran los datos observados, el área de puntos indica el número de observaciones para cada punto de datos, las líneas discontinuas muestran los valores ajustados del modelo y las áreas simbolizan los intervalos de confianza del modelo. Publicado anteriormente en32. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Seis de los 19 sujetos recibieron el protocolo motivacional durante el experimento (Laboratorio: 1 de 11; Campo: 5 de 8). El PC1 de estas aves, que categorizamos como no motivadas, osciló entre -2.934 y -2.2, mientras que se encontraron valores positivos para todos los demás individuos motivados (Tabla 3).
Con el método presentado no encontramos diferencia de grupo en la probabilidad de resolver las 20 tareas técnicas de resolución de problemas del Innovation Arena (estimación = −0,089, SE ± 1,012, χ2 = 0,005, p = 0,945; Figura 5; véase el cuadro 4 para las estimaciones de los efectos fijos; todas las aves incluidas).
Una comparación post-hoc del modelo con uno que incluye un término de interacción de grupo con sesión (estimación = 2,924, SE ± 0,854, χ2 = 14,461, p < 0,001) sugiere una menor probabilidad de resolver en el grupo de campo en sesiones anteriores pero no en las posteriores. Esta diferencia en sesiones anteriores podría deberse al alto número de aves menos/no motivadas en el campo grupal (individuos para los que las pruebas se detuvieron debido a la regla de no resolver ninguna tarea en 10 sesiones consecutivas recibidas entre 10 y 13 sesiones).
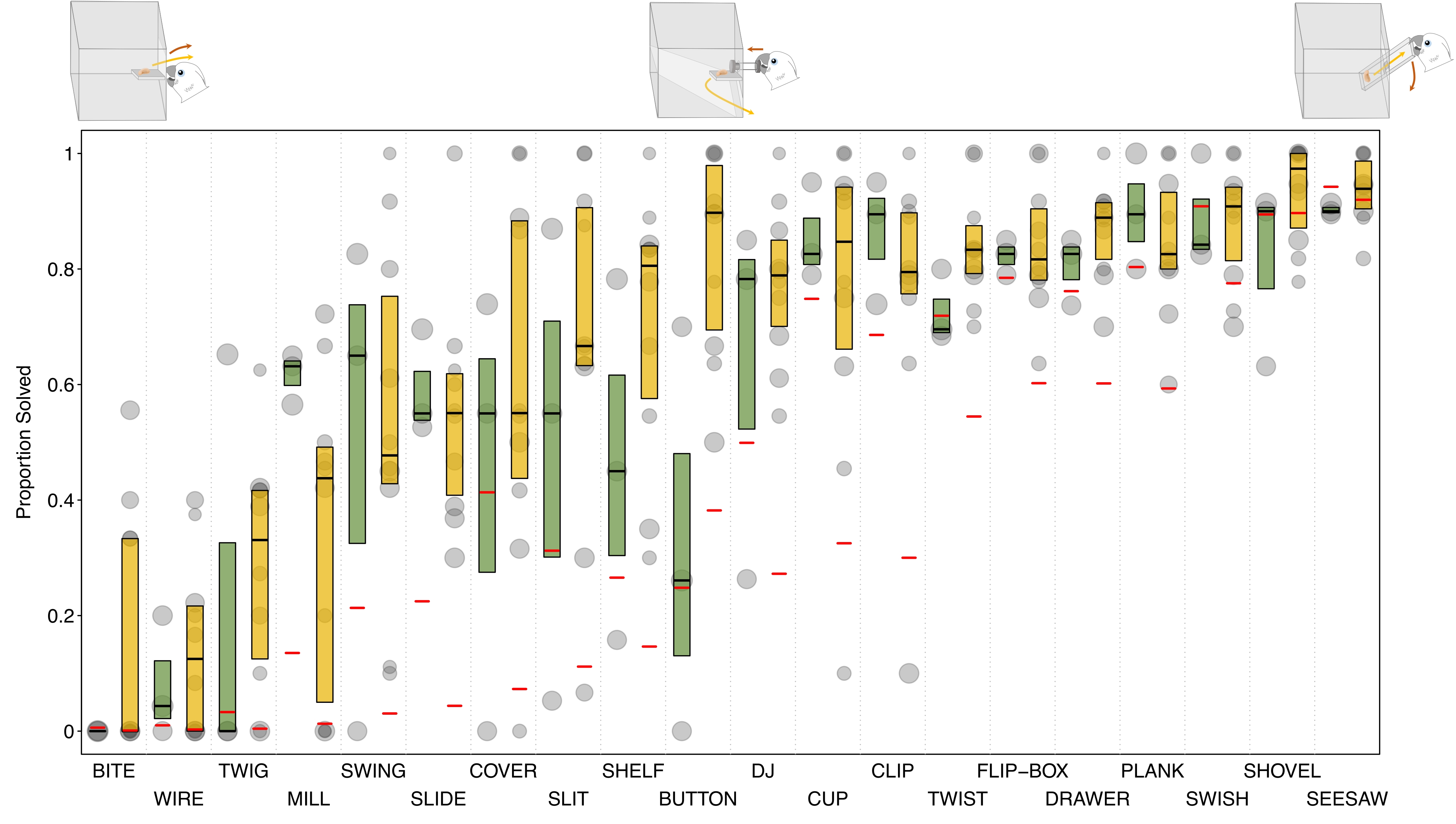
Además, no se encontraron diferencias entre los grupos con respecto a la dificultad general de las tareas (comparación del modelo completo con todas las aves incluidas, con un modelo reducido que carecía de pendiente aleatoria del grupo dentro de la tarea: χ2 = 7,589, df = 5, p = 0,18). Sin embargo, las comparaciones visuales de aves que nunca requirieron un ensayo motivacional, sugieren algunas diferencias en la capacidad para tareas individuales individuales (véase, por ejemplo, la tarea Botón en la Figura 6).

Figura 6: Datos observados de sujetos motivados y valores ajustados de modelo por tarea y grupo: Los diagramas de caja muestran la proporción de éxitos por tarea para ambos grupos (verde = Campo; naranja = Laboratorio). Las líneas horizontales en negrita indican los valores medios, las cajas abarcan desde el primer hasta el tercer cuartil para las aves. Los diagramas de caja ilustran solo datos de aves motivadas (para mejorar la claridad visual). Las observaciones individuales se representan por puntos (un área más grande indica más observaciones por punto de datos). Las líneas horizontales rojas muestran los valores ajustados. Los valores ajustados se originan en todo el conjunto de datos. Se incluyen ilustraciones de las tareas Bite (abajo a la izquierda), Button (arriba en el medio) y Seesaw (arriba a la derecha). Publicado anteriormente en32. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Estos resultados demuestran la viabilidad de la metodología para la investigación comparativa, incluso si los animales tienen diferentes experiencias y circunstancias ecológicas. Una comparación de habilidades innovadoras de resolución de problemas utilizando una sola tarea, como la tarea Button, podría haber arrojado una conclusión falsa de que las aves cautivas a largo plazo son mejores solucionadoras de problemas. Esta diferencia podría explicarse por la experiencia de la población de laboratorio con los experimentos de inserción de palos, mientras que la acción motora podría no ser tan ecológicamente relevante para las poblaciones silvestres. Tales diferencias podrían ser potencialmente más pronunciadas cuando se comparan diferentes especies (ver19). Además, pudimos probar cómo la motivación afecta la capacidad de resolución de problemas, mientras que al mismo tiempo comparamos los resultados de los dos grupos mientras controlamos la motivación.
Por lo tanto, los 20 problemas técnicos del Innovation Arena se pueden utilizar para detectar diferencias de grupo en tareas particulares, pero también para estimar la capacidad innovadora general de los grupos. En el caso de la cacatúa de Goffin, ambos grupos pueden, es decir, tener la capacidad de, recuperar muchas recompensas, si lo desean, es decir, están motivados para interactuar con el aparato.
Tabla 1: Protocolo para codificar comportamientos: Descripción detallada de variables de comportamiento codificadas. Publicado anteriormente en32. Haga clic aquí para descargar esta tabla.
Cuadro 2: Resultados de los componentes principales: Las cargas de factor por encima de 0,40 se imprimen en negrita. Publicado anteriormente en32. Haga clic aquí para descargar esta tabla.
Tabla 3: Detalles sobre temas y valores de los comportamientos dirigidos a tareas y componentes principales: Los superíndices si las cargas de medida superan los 0,40 por PC. Publicado anteriormente en32. Haga clic aquí para descargar esta tabla.
Tabla 4: Resultados de efectos fijos del modelo para la probabilidad de resolver. Publicado anteriormente en32. Haga clic aquí para descargar esta tabla.
Expediente Complementario: Dibujo técnico del Ámbito de la Innovación (InnovationArena.3dm). Las dimensiones pueden desviarse ligeramente. Se puede cargar, por ejemplo, en 3dviewer.net, que es un visor de modelos 3D gratuito y de código abierto39. Haga clic aquí para descargar este archivo.
Discusión
El Innovation Arena es un nuevo protocolo para probar la resolución de problemas técnicos innovadores. Al diseñar las tareas del Innovation Arena, consideramos cuidadosamente que las tareas deberían ser posibles de resolver dadas una variedad de limitaciones morfológicas de las especies (por ejemplo, usando picos, hocicos, patas, garras o manos). Para permitir una comparabilidad más amplia entre las especies ya probadas y las especies que se probarán en el futuro, alentamos el uso de estas tareas, si es factible con el modelo respectivo. Sin embargo, somos conscientes de que algunas tareas pueden necesitar ser ajustadas a los límites morfológicos específicos de una especie. Lo más importante es que las tareas deben ser novedosas para los sujetos, lo que puede requerir diseños nuevos y alternativos. Una ventaja del Innovation Arena es que, debido a la cantidad de tareas diferentes, las comparaciones seguirán siendo posibles e informativas, incluso si algunas tareas deben ajustarse o cambiarse en estudios futuros.
Al planificar el estudio, se debe considerar que la fase previa a la prueba (por ejemplo, el diseño y la construcción del aparato) puede requerir una cantidad considerable de tiempo. Además, es importante habituar completamente a los sujetos al aparato. Los diferentes grupos pueden diferir sustancialmente en su abordaje exploratorio y reacciones nóticas 40,41,42. La eliminación (o reducción) de las reacciones neofóbicas hará que las comparaciones sean más fiables y permitirá identificar el papel de la motivación. Para medir la aparición individual de innovaciones a lo largo del tiempo y evitar el aprendizaje social, es crucial que los sujetos se prueben repetida e individualmente, lo que puede ser un desafío en condiciones de campo. Para muchas especies, los sujetos capturados en la naturaleza necesitarán mucho tiempo para habituarse al nuevo entorno, la presencia humana y la interacción y para desarrollar un procedimiento de separación de trabajo. Además, es posible que no sea prácticamente posible cumplir estrictamente con el programa de aleatorización para cada individuo por sesión. Si bien las cacatúas cautivas a largo plazo en nuestro estudio fueron entrenadas para ingresar al compartimiento de prueba cuando se las llama por su nombre individual, necesitábamos ser más oportunistas con respecto a qué individuo ingresa a la sala de pruebas en el campo. Aparte de los niveles de motivación, nos encontramos con otro factor que podría influir en los resultados de un estudio comparativo utilizando el Innovation Arena. Debido a las preferencias de alimentación y la disponibilidad de alimentos, utilizamos diferentes tipos de recompensa para los dos grupos, lo que aumentó los tiempos de alimentación de las cacatúas silvestres en comparación con las aves de laboratorio. Se tuvieron en cuenta estas diferencias agregando la duración de la alimentación (si excedía los 3 s) a la cantidad total de tiempo que un individuo se enfrentó a la arena. Este protocolo aseguró que el tiempo para interactuar con la arena no se redujera en un grupo debido al tiempo de alimentación. Los estudios futuros deberían considerar este problema potencial y podrían tener como objetivo implementar este protocolo ya en la fase de habituación.
La fuerza y novedad de este método incluye la combinación de una mayor variedad de tareas, la presentación simultánea de estas tareas, múltiples recompensas por encuentro con el aparato y la exposición repetida al aparato para cada sujeto.
Además, los individuos son probados hasta que no resuelven ninguna tarea nueva. A diferencia de un número fijo de sesiones, este nivel máximo (o asintótico) de descubrimiento de soluciones, junto con el número de tareas resueltas por sesión, puede ser informativo sobre la posible adaptación de un grupo a un entorno cambiante.
Un ejemplo de método alternativo es el Multi Access Box (MAB), en el que es posible resolver una tarea a través de cuatro soluciones diferentes pero solo se puede recuperar una recompensa por encuentro con el aparato18 y por lo tanto la estimación de la tasa de innovación a lo largo del tiempo es significativamente limitada. Además, las dificultades con tareas individuales, que pueden ser específicas de la especie, pueden influir fuertemente en la comparación de los rendimientos con respecto a las capacidades cognitivas. Hasta donde sabemos, la presentación simultánea de tareas con soluciones motoramente distintas se ha limitado a un máximo de seis tareas en estudios previos (Federspiel, MAB de 6 vías sobre aves mynah, datos hasta ahora inéditos). Si bien el MAB es una herramienta muy útil para descubrir técnicas de exploración, creemos que el Innovation Arena es más adecuado para la comparación de la capacidad de innovar por sí mismo. Una gama más amplia de tareas, que también varían en dificultad, puede ser más informativa sobre una competencia técnica general de resolución de problemas29.
En nuestro primer estudio, comparamos con éxito dos grupos de la misma especie, la cacatúa de Goffin, que difería sustancialmente en su experiencia. Con esta comparación, nos enfocamos específicamente en la cuestión de si el cautiverio a largo plazo influye en las habilidades de resolución de problemas. Estudios previos han sugerido que un estilo de vida cautivo prolongado mejora esas habilidades (ver30,43), pero las comparaciones directas a través de enfoques experimentales controlados han sido raras (pero ver44,45). Al utilizar el Innovation Arena, pudimos abordar esta pregunta y no encontramos apoyo para un efecto de cautiverio en la capacidad general de Goffins para encontrar soluciones novedosas, sino más bien un efecto en un nivel motivacional32.
Además, el Innovation Arena se puede utilizar para abordar preguntas centradas en diferentes aspectos de la resolución innovadora de problemas. Otras medidas podrían incluir investigaciones dirigidas a los efectos de la divergencia y la convergencia. Por ejemplo, comparaciones entre especies estrechamente relacionadas que difieren en sus ecologías (por ejemplo, especies insulares vs. especies no insulares), pero también especies relacionadas distantemente, como un loro y un representante de córvidos o especies de aves y primates que previamente mostraron rendimientos similares en la resolución de problemas físicos individuales46. El Innovation Arena fue desarrollado para comparar muchas especies diferentes, incluso aquellas que están distantemente relacionadas.
Dicho esto, este método también podría usarse para investigar las diferencias interindividuales. Por ejemplo, uno podría usar los puntajes de personalidad como predictores para estimar su influencia en la tasa de innovación. Creemos que el método presentado puede ser utilizado por grupos de investigación que estudian la innovación animal y humana, y / o en colaboración por laboratorios que se especializan en el estudio de diferentes especies.
Divulgaciones
Los autores declaran que no hay conflictos de intereses.
Agradecimientos
Agradecemos a Stefan Schierhuber y David Lang por su ayuda en la producción de este video, a Christoph Rössler por su ayuda con los dibujos técnicos y a Poppy Lambert por revisar este manuscrito. Esta publicación fue financiada por el Fondo Austriaco para la Ciencia (FWF; Proyecto START Y01309 adjudicado a A.A.). La investigación presentada fue financiada por el Fondo Austriaco para la Ciencia (FWF; proyectos P29075 y P29083 otorgados a A.A. y el proyecto J 4169-B29 otorgado a M.O.), así como el Fondo de Ciencia y Tecnología de Viena (WWTF; proyecto CS18-023 otorgado a A.A.).
Materiales
| Name | Company | Catalog Number | Comments |
| wooden platform | Dimensions: wooden semicircle, radius approx. 1.5m | ||
| FIXATION SYSTEM | |||
| 5 x metal nut | Dimensions: M8 | ||
| 5 x rod | (possibly with U-profile) | ||
| 5 x threaded rod | Dimensions: M8; length: 25cm | ||
| 5 x wing nut | Dimensions: M8 | ||
| PUZZLE BOXES WITHOUT FUNCTION PARTS | |||
| 20 x acrylic glass back | Dimensions: 17cm x 17.5cm x 0.5cm | ||
| 20 x acrylic glass base | 4 holes for screws roughly 2cm from each side Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| 20 x acrylic glass front | acrylic glass fronts need to be cut differently for each puzzle box (see drawing) Dimensions: 17cm x 15cm x 0.5cm | ||
| 20 x acrylic glass lid | cut out 0.5cm at the edges for better fit Dimensions: trapezoid shape: 18.5cm x 16cm x 16cm x 1cm (thick) | ||
| 40 x acrylic glass side | Dimensions: 17cm x 16cm x 0.5cm | ||
| 80 x small screw | to attach bases to the platform (4 screws per base) | ||
| PARTS FOR EACH MECHANSIM PER TASK | |||
| to assemble the parts use technical drawing InnovationArena.3dm | can be loaded e.g. in 3dviewer.net, which is a free and open source 3D model viewer. github repository: https://github.com/kovacsv/Online3DViewer; please contact authors if you are in need of a different format | ||
| TASK TWIST | |||
| 5x small nut | to attach glass (punch holes) and acrylic glass cube to threaded rod | ||
| acrylic glass | Dimensions: 2cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5cm; base diameter: 3cm | ||
| thin threaded rod | Dimensions: length: approx. 10cm | ||
| TASK BUTTON | |||
| 2x nut | attach to rod; glue outer nut to rod Dimensions: M8 | ||
| acrylic glass | V-cut to facilitate sliding of rod Dimensions: 4cm x 3cm x 1cm (0.5cm V-cut in the middle) | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| threaded rod | Dimensions: M8, length: 5cm | ||
| TASK SHELF | |||
| acrylic glass top | Dimensions: 5cm x 4cm x 0.3cm | ||
| acrylic glass lower | Dimensions: 5cm x 4cm x 1cm | ||
| acrylic glass side 1 | Dimensions: 4cm x 3cm x 0.5cm | ||
| acrylic glass side 2 | Dimensions: 4.5cm x 3cm x 0.5cm | ||
| thin plastic bucket | one side cut off to fit Dimensions: diameter: approx. 4.5 cm; height: 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| TASK SLIT | room to reach in: 2cm in height | ||
| - | recommended: add small plastic barrier behind reward so it cannot be pushed further into the box | ||
| TASK CLIP | |||
| 2x acrylic glass | Dimensions: 1cm x 1cm x 2cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| peg | Dimensions: length: approx. 6 cm | ||
| thin threaded rod | Dimensions: length: approx. 6 cm | ||
| TASK MILL | |||
| 2x arylic glass triangle | Dimensions: 10cm x 7.5cm x 7.5cm; thickness: 1cm | ||
| 2x plastic disc | Dimensions: diameter: 12cm | ||
| 4x small nut | for attachment | ||
| 7x acrylic glass | Dimensions: 4.5cm x 2cm, 0.5cm | ||
| acrylic glass long | position the mill with longer acrylic glass touching lower half of the front (this way the mill can only turn in one direction) Dimensions: 6.5cm x 2cm, 0.5cm | ||
| thin threaded rod | Dimensions: length: approx. 4cm | ||
| wooden cylinder | Dimensions: diameter: 2cm | ||
| TASK SWISH | |||
| 2x acrylic glass | Dimensions: 2cm x 1cm x 1cm | ||
| 4x small nut | for attachment | ||
| acrylic glass | Dimensions: 10cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin threaded rod | Dimensions: length: approx. 7cm | ||
| wooden cylinder | Dimensions: diameter: 2cm, cut-off slantwise; longest part: 7cm, shortest part: 5cm | ||
| TASK SHOVEL | |||
| acrylic glass | Dimensions: 20cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 7.5cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 5cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SWING | |||
| 4x nut | Dimensions: M8 | ||
| acrylic glass | Dimensions: 7.5cm x 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| cord strings | Dimensions: 2x approx. 11cm | ||
| thin bent plastic | bucket to hold reward; positioned on slant | ||
| threaded rod | Dimensions: M8; length: 7cm | ||
| TASK SEESAW | |||
| 2x acrylic glass | Dimensions: 10cm x 1.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 1.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 10cm x 3cm x 0.5cm | ||
| acrylic glass | Dimensions: 4cm x 1.5cm x 1cm | ||
| small hinge | |||
| TASK PLANK | |||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin tin | bent approx. 1cm inside box Dimensions: 6.5cm x 3cm | ||
| TASK CUP | |||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5; base diameter: 3cm | ||
| TASK FLIP-BOX | |||
| 2x acrylic glass triangle | Dimensions: 7cm x 5cm x 5cm; thickness: 0.5cm | ||
| 2x acrylic glass | Dimensions: 4.5cm x 5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 7cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SLIDE | |||
| 4x acrylic glass | Dimensions: 15cm x 1cm x 0.5cm | ||
| acrylic glass door | Dimensions: 6cm x 6cm x 0.5cm | ||
| TASK DJ | |||
| 2x small nut | for attachment | ||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| plastic disc | Dimensions: diameter 12cm | ||
| thin threaded rod | Dimensions: length: approx. 3cm | ||
| TASK WIRE | |||
| acrylic glass | Dimensions: 9.5cm x 9.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 12cm x 2cm x 1cm | ||
| 2x small hinge | |||
| wire from a paperclip | |||
| TASK TWIG | |||
| 2x small hinge | |||
| acrylic glass | Dimensions: 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| white cardboard | Dimensions: 13cm x 4cm | ||
| Y-shaped twig | Dimensions: length: approx. 14cm | ||
| TASK COVER | |||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| thin plastic | Dimensions: diameter: 5cm | ||
| TASK BITE | recommended: put tape on sides of platform the keep reward from falling off | ||
| 2-3 paper clips | |||
| 2x cutout from clipboard | Dimensions: 10cm x 3cm | ||
| acrylic glass | hole in middle Dimensions: 5cm x 3cm x 1cm | ||
| toilet paper | |||
| TASK DRAWER | |||
| 2x acrylic glass | Dimensions: 5cm x 2.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 3cm x 1cm | ||
| acrylic glass | hole approx. 2 cm from front Dimensions: 5cm x 5cm x 1cm | ||
| OTHER MATERIAL | |||
| wide-angle videocamera |
Referencias
- Fisher, J. The opening of milkbottles by birds. British Birds. 42, 347-357 (1949).
- Kummer, H., Goodall, J. Conditions of innovative behaviour in primates. Philosophical Transactions of the Royal Society of London. B, Biological Sciences. 308 (1135), 203-214 (1985).
- Tebbich, S., Griffin, A. S., Peschl, M. F., Sterelny, K. From mechanisms to function: an integrated framework of animal innovation. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150195 (2016).
- Reader, S. M., Laland, K. N. Social intelligence, innovation, and enhanced brain size in primates. Proceedings of the National Academy of Sciences. 99 (7), 4436-4441 (2002).
- Reader, S. M., Laland, K. N. Primate innovation: Sex, age and social rank differences. International Journal of Primatology. 22 (5), 787-805 (2001).
- Lefebvre, L., Whittle, P., Lascaris, E., Finkelstein, A. Feeding innovations and forebrain size in birds. Animal Behaviour. 53 (3), 549-560 (1997).
- Lefebvre, L., et al. Feeding innovations and forebrain size in Australasian birds. Behaviour. 135 (8), 1077-1097 (1998).
- Timmermans, S., Lefebvre, L., Boire, D., Basu, P. Relative size of the hyperstriatum ventrale is the best predictor of feeding innovation rate in birds. Brain, Behavior and Evolution. 56 (4), 196-203 (2000).
- Ducatez, S., Clavel, J., Lefebvre, L. Ecological generalism and behavioural innovation in birds: technical intelligence or the simple incorporation of new foods. Journal of Animal Ecology. 84 (1), 79-89 (2015).
- Sol, D., Lefebvre, L., Rodríguez-Teijeiro, J. D. Brain size, innovative propensity and migratory behaviour in temperate Palaearctic birds. Proceedings of the Royal Society B: Biological Sciences. 272 (1571), 1433-1441 (2005).
- Sol, D., Sayol, F., Ducatez, S., Lefebvre, L. The life-history basis of behavioural innovations. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150187 (2016).
- Griffin, A. S., Guez, D. Innovation and problem solving: A review of common mechanisms. Behavioural Processes. 109, 121-134 (2014).
- Laumer, I. B., Bugnyar, T., Reber, S. A., Auersperg, A. M. I. Can hook-bending be let off the hook? Bending/unbending of pliant tools by cockatoos. Proceedings of the Royal Society B. Biological Sciences. 284 (1862), 20171026 (2017).
- Rutz, C., Sugasawa, S., Vander Wal, J. E. M., Klump, B. C., St Clair, J. J. H. Tool bending in New Caledonian crows. Royal Society Open Science. 3 (8), 160439 (2016).
- Weir, A. A. S., Kacelnik, A. A New Caledonian crow (Corvus moneduloides) creatively re-designs tools by bending or unbending aluminium strips. Animal Cognition. 9 (4), 317-334 (2006).
- Herrmann, E., Hare, B., Call, J., Tomasello, M. Differences in the cognitive skills of bonobos and chimpanzees. PloS One. 5 (8), 12438 (2010).
- Herrmann, E., Call, J., Hernández-Lloreda, M. V., Hare, B., Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science. 317 (5843), 1360-1366 (2007).
- Auersperg, A. M. I., Gajdon, G. K., von Bayern, A. M. P. A new approach to comparing problem solving, flexibility and innovation. Communicative & Integrative Biology. 5 (2), 140-145 (2012).
- Auersperg, A. M. I., von Bayern, A. M. P., Gajdon, G. K., Huber, L., Kacelnik, A. Flexibility in problem solving and tool use of Kea and New Caledonian crows in a multi access box paradigm. PLoS One. 6 (6), 20231 (2011).
- Daniels, S. E., Fanelli, R. E., Gilbert, A., Benson-Amram, S. Behavioral flexibility of a generalist carnivore. Animal Cognition. 22 (3), 387-396 (2019).
- Johnson-Ulrich, L., Holekamp, K. E., Hambrick, D. Z. Innovative problem-solving in wild hyenas is reliable across time and contexts. Scientific Reports. 10 (1), 13000 (2020).
- Johnson-Ulrich, L., Johnson-Ulrich, Z., Holekamp, K. Proactive behavior, but not inhibitory control, predicts repeated innovation by spotted hyenas tested with a multi-access box. Animal Cognition. 21 (3), 379-392 (2018).
- Williams, D. M., Wu, C., Blumstein, D. T. Social position indirectly influences the traits yellow-bellied marmots use to solve problems. Animal Cognition. 24 (4), 829-842 (2021).
- Cooke, A. C., Davidson, G. L., van Oers, K., Quinn, J. L. Motivation, accuracy and positive feedback through experience explain innovative problem solving and its repeatability. Animal Behaviour. 174, 249-261 (2021).
- Huebner, F., Fichtel, C. Innovation and behavioral flexibility in wild redfronted lemurs (Eulemur rufifrons). Animal Cognition. 18 (3), 777-787 (2015).
- Godinho, L., Marinho, Y., Bezerra, B. Performance of blue-fronted amazon parrots (Amazona aestiva) when solving the pebbles-and-seeds and multi-access-box paradigms: ex situ and in situ experiments. Animal Cognition. 23 (3), 455-464 (2020).
- Bouchard, J., Goodyer, W., Lefebvre, L. Social learning and innovation are positively correlated in pigeons (Columba livia). Animal Cognition. 10 (2), 259-266 (2007).
- Griffin, A. S., Diquelou, M., Perea, M. Innovative problem solving in birds: a key role of motor diversity. Animal Behaviour. 92, 221-227 (2014).
- Webster, S. J., Lefebvre, L. Problem solving and neophobia in a columbiform-passeriform assemblage in Barbados. Animal Behaviour. 62 (1), 23-32 (2001).
- Haslam, M. 34;Captivity bias" in animal tool use and its implications for the evolution of hominin technology. Philosophical Transactions of the Royal Society B: Biological Sciences. 368 (1630), 20120421 (2013).
- Lambert, M. L., Jacobs, I., Osvath, M., von Bayern, A. M. P. Birds of a feather? Parrot and corvid cognition compared. Behaviour. , 1-90 (2018).
- Rössler, T., et al. Using an Innovation Arena to compare wild-caught and laboratory Goffin´s cockatoos. Scientific Reports. 10 (1), 8681 (2020).
- Laumer, I. B., Bugnyar, T., Auersperg, A. M. I. Flexible decision-making relative to reward quality and tool functionality in Goffin cockatoos (Cacatua goffiniana). Scientific Reports. 6, 28380 (2016).
- Friard, O., Gamba, M. BORIS: a free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- R. Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. , (2020).
- McCullagh, P., Nelder, J. A. Generalized linear models. Monographs on Statistics and Applied Probability. , (1989).
- Forstmeier, W., Schielzeth, H. Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner's curse. Behavioral Ecology and Sociobiology. 65 (1), 47-55 (2011).
- Kaiser, H. F. The application of electronic computers to factor analysis. Educational and Psychological Measurement. 20 (1), 141-151 (1960).
- . Online 3D Viewer Available from: https://github.com/lovacsv/Online3DViewer (2021)
- Greenberg, R. S., Mettke-Hofmann, C. Ecological aspects of neophobia and neophilia in birds. Current Ornithology. 16, 119-169 (2001).
- Mettke-Hofmann, C., Winkler, H., Leisler, B. The Significance of Ecological Factors for Exploration and Neophobia in Parrots. Ethology. 108 (3), 249-272 (2002).
- O'Hara, M., et al. The temporal dependence of exploration on neotic style in birds. Scientific Reports. 7 (1), 4742 (2017).
- Chevalier-Skolnikoff, S., Liska, J. O. Tool use by wild and captive elephants. Animal Behaviour. 46 (2), 209-219 (1993).
- Benson-Amram, S., Weldele, M. L., Holekamp, K. E. A comparison of innovative problem-solving abilities between wild and captive spotted hyaenas, Crocuta crocuta. Animal Behaviour. 85 (2), 349-356 (2013).
- Gajdon, G. K., Fijn, N., Huber, L. Testing social learning in a wild mountain parrot, the kea (Nestor notabilis). Animal Learning and Behavior. 32 (1), 62-71 (2004).
- Shettleworth, S. J. . Cognition, Evolution, and Behavior. , (2009).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados