
Method Article
Die Innovationsarena: Eine Methode zum Vergleich innovativer Problemlösungen zwischen Gruppen
In diesem Artikel
Zusammenfassung
Die Innovation Arena ist eine neuartige Vergleichsmethode zur Untersuchung der technischen Innovationsrate pro Zeiteinheit bei Tieren. Es setzt sich aus 20 verschiedenen Problemlösungsaufgaben zusammen, die gleichzeitig vorgestellt werden. Innovationen können frei durchgeführt werden und das Setup ist robust in Bezug auf Veranlagungen auf Einzel-, Populations- oder Artebene.
Zusammenfassung
Problemlösungsaufgaben werden häufig verwendet, um technisches, innovatives Verhalten zu untersuchen, aber ein Vergleich dieser Fähigkeit über ein breites Spektrum von Arten hinweg ist ein herausforderndes Unterfangen. Spezifische Veranlagungen, wie das morphologische Instrumentarium einer Art oder Explorationstechniken, können die Leistung bei solchen Aufgaben erheblich beeinflussen, was direkte Vergleiche erschwert. Die hier vorgestellte Methode wurde entwickelt, um in Bezug auf solche artspezifischen Unterschiede robuster zu sein: Die Innovation Arena präsentiert 20 verschiedene Problemlösungsaufgaben. Alle Aufgaben werden gleichzeitig vorgestellt. Die Probanden werden immer wieder mit dem Apparat konfrontiert, was eine Messung der Entstehung von Innovationen im Laufe der Zeit ermöglicht - ein wichtiger nächster Schritt, um zu untersuchen, wie sich Tiere durch innovatives Verhalten an veränderte Umweltbedingungen anpassen können.
Jeder Einzelne wurde mit dem Gerät getestet, bis es aufhörte, Lösungen zu entdecken. Nachdem die Tests abgeschlossen waren, analysierten wir die Videoaufzeichnungen und codierten den erfolgreichen Abruf von Belohnungen und mehreren apparategesteuerten Verhaltensweisen. Letztere wurden mit Hilfe einer Hauptkomponentenanalyse analysiert und die resultierenden Komponenten wurden dann zusammen mit der Sitzungsnummer und dem interessierenden Gruppenvergleich in ein verallgemeinertes lineares gemischtes Modell aufgenommen, um die Erfolgswahrscheinlichkeit vorherzusagen.
Wir haben diesen Ansatz in einer ersten Studie verwendet, um die Frage zu beantworten, ob die langfristige Gefangenschaft die Problemlösungsfähigkeit einer Papageienart beeinflusst, die für ihr innovatives Verhalten bekannt ist: der Goffin-Kakadu. Wir fanden einen Effekt im Grad der Motivation, aber keinen Unterschied in der Problemlösungsfähigkeit zwischen kurz- und langfristigen Gruppen in Gefangenschaft.
Einleitung
Eine Kohlmeise (Parus major) wird mit einer Milchflasche konfrontiert, kann aber nicht direkt auf die Milch zugreifen, da die Flasche durch eine Aluminiumfolie verschlossen ist. Es findet eine Lösung für dieses Problem, indem es durch die Folie pickt, damit es die Sahne trinken kann. Diese Situation beschreibt eines der bekanntesten Beispiele für tierische Innovation1.
Die Lösung solcher Probleme kann von Vorteil sein, insbesondere in Umgebungen, die häufigen Änderungen unterliegen. Kummer und Goodall2 haben Innovation im Großen und Ganzen definiert als das Finden "einer Lösung für ein neuartiges Problem oder einer neuartigen Lösung für ein altes". Eine detailliertere Definition von Innovation wurde von Tebbich und Kollegen3 postuliert als "die Entdeckung einer neuen Verhaltensinteraktion mit der sozialen oder physischen Umgebung, die Erschließung einer bestehenden Gelegenheit und / oder die Schaffung einer neuen Gelegenheit".
Spontane Innovationen zu beobachten, erfordert gründliche und zeitaufwendige Beobachtungen, die in einem Rahmen, der eine Vielzahl von Arten umfasst, oft nicht durchführbar sind. Um dieser Herausforderung zu begegnen, haben Forscher rigorose Literaturrecherchen durchgeführt, um die Innovationsrate4,5 zu schätzen, und Korrelationen zwischen der Innovationsneigung und anderen Faktoren wie neurologischen Messungen 6,7,8 und Fütterungsökologie 9,10,11 aufgedeckt. . Experimentelle Tests können jedoch innovatives Verhalten in einer kontrollierten Umgebung hervorrufen. Aus diesem Grund werden Leistungen bei technischen Problemlösungsaufgaben häufig als Stellvertreter für Innovationsfähigkeit bei Tieren herangezogen (siehe Review in12).
Eine Vielzahl von verschiedenen Ansätzen wurde verwendet, um innovative Problemlösungen zu untersuchen: Zum Beispiel können verschiedene Gruppen von Tieren anhand ihrer Leistung bei einer bestimmten Aufgabe verglichen werden. Solche Studien zielen typischerweise auf bestimmte Innovationen oder kognitive Fähigkeiten ab (z. B. Hakenbiegeverhalten; siehe13,14,15). Dies ermöglicht es den Forschern, detaillierte Informationen in einem bestimmten Kontext zu erhalten, aber die Interpretation von Ähnlichkeiten oder Unterschieden ist durch die Art der Aufgabe begrenzt, die möglicherweise unterschiedliche Innovationskraft von verschiedenen Gruppen erfordert (wie in13,14 diskutiert).
Andere Studien haben eine Reihe von aufeinanderfolgenden Aufgabendurchgeführt 16,17. Ein Vergleich der Leistungen bei mehreren Aufgaben und eine Abschätzung der Gesamtkompetenz innerhalb spezifischer Domänen wird durch diese Methode ermöglicht. Eine Einschränkung solcher Studien liegt jedoch in der sukzessiven Darstellung der verschiedenen Aufgaben, die keine Untersuchung der Entstehung von Innovationen im Laufe der Zeit zulässt.
Ein weiterer Ansatz besteht darin, gleichzeitig verschiedene Optionen für den Zugriff auf eine einzelne Belohnung anzubieten. Dies wird häufig durch die Verwendung der Multi Access Box (MAB) 18,19,20,21,22,23,24,25,26 erreicht, wobei eine Belohnung in der Mitte einer Puzzlebox platziert wird und über vier verschiedene Lösungen abrufbar ist. Sobald die gleiche Lösung konsequent verwendet wird, wird sie blockiert und das Tier muss zu einer anderen Lösung wechseln, um auf die Belohnung zugreifen zu können. Durch ein solches Experiment können Präferenzen zwischen und innerhalb der Arten nachgewiesen und berücksichtigt werden, aber es begrenzt immer noch den Ausdruck von innovativem Verhalten auf eine Lösung pro Versuch 18,19,20,21. In anderen Studien wurden den Tieren auch Apparaturen vorgestellt, die mehrere Lösungen gleichzeitig enthielten, jede mit unterschiedlichen Belohnungen. Dies ermöglicht mehrere Innovationen innerhalb eines einzigen Versuchs, aber bisher waren die Aufgaben weitgehend auf einige wenige motorisch unterschiedliche Lösungen beschränkt. Da dies nicht der Schwerpunkt dieser Untersuchungen war, beinhalteten die Versuchsaufbauten keine wiederholten Expositionen an der Apparatur, was ein Maß für die Innovationsrate pro Zeiteinheit27,28,29 ermöglichen würde.
Hier stellen wir eine Methode vor, die uns neben anderen Ansätzen helfen kann, verschiedene Arten in ihren innovativen Problemlösungsfähigkeiten zu vergleichen. Wir haben eine breitere Palette von Aufgaben innerhalb eines einzigen Setups entwickelt, von denen erwartet wird, dass sie sich je nach Gruppe oder Spezies in ihrem Schwierigkeitsgrad unterscheiden. Es ist daher weniger wahrscheinlich, dass aufgabenspezifische Disparitäten die Gesamtwahrscheinlichkeit der Lösungsfindung beeinflussen. Darüber hinaus stellen wir alle Aufgaben gleichzeitig und wiederholt vor, um die Entstehung von Innovationen im Zeitverlauf zu messen. Diese Maßnahme hat das Potenzial, unser Verständnis über den adaptiven Wert von innovativem Verhalten zu verbessern.
Eine erste Studie, die diese Methode verwendet, hat untersucht, ob die Langzeitgefangenschaft die Problemlösungsfähigkeiten (wie der sogenannte Gefangenschaftseffekt nahelegt; siehe30) des Goffin-Kakadus ( Cacatua goffiniana; im Folgenden: Goffins), einer Vogelmodellart für technische Innovationsfähigkeit (überprüft in31), beeinflusst.
Protokoll
Diese Studie wurde von der Ethik- und Tierschutzkommission der Veterinärmedizinischen Universität Wien in Übereinstimmung mit den Leitlinien guter wissenschaftlicher Praxis und der nationalen Gesetzgebung genehmigt. Der Versuch war rein appetitiv und streng nicht-invasiv und wurde daher gemäß dem österreichischen Tierversuchsgesetz (TVG 2012) als tierversuchsfreier Versuch eingestuft. Der Teil des in Indonesien durchgeführten Experiments wurde vom Ministerium für Forschung, Technologie und Hochschulbildung (RISTEK) genehmigt, basierend auf einem Treffen des Foreign Researcher Permit Coordinating Team (10 / TKPIPA / E5 / Dit.KI / X / 2016), das die Genehmigungen für die Durchführung dieser Forschung an M.O. (410 / SIP / FRP / E5 / Dit.KI / XII / 2016) und B.M. (411 / SIP / FRP / E5 / Dit.KI / XII / 2016) erteilte.
1. Voraussetzungen/Voraussetzungen
- Grundlagen
- Stellen Sie sicher, dass die Subjekte individuell identifiziert werden können. Die Studienspezies können unterschiedliche individuelle Muster aufweisen oder Individuen können markiert werden (z. B. mit Farbringen oder ungiftiger Farbe).
HINWEIS: Weitere Informationen zum Beringen sowie zum Fangen und Freilassen wilder Goffins finden Sie unter Capture-Release Procedure in Supplementary Informationof 32. - Stellen Sie sicher, dass ein visuell verschlossener Raum zum Testen zur Verfügung steht, um soziales Lernen zwischen den Probanden zu vermeiden.
- Identifizieren Sie eine sehr bevorzugte Belohnung für die untersuchten Spezies und Gruppe, indem Sie mehrere verschiedene, verfügbare Leckereien testen (siehe33 oder Food Preference Test in Supplementary Information of reference32).
- Überlegen Sie, ob sich die Fütterungszeit zwischen den Gruppen wesentlich unterscheidet. Wenn dies der Fall ist, sollten Sie ein Protokoll in Betracht ziehen, das sicherstellt, dass die Fütterungszeit die Zeit, die zum Lösen von Aufgaben für eine der Gruppen zur Verfügung steht, nicht erheblich verkürzt (weitere Informationen finden Sie in Schritt 4.8).
HINWEIS: In dieser Studie gab es eine Präferenz der Langzeit-Captive-Gruppe für Cashewnüsse und für getrockneten Mais in der Kurzzeit-Captive-Gruppe.
- Stellen Sie sicher, dass die Subjekte individuell identifiziert werden können. Die Studienspezies können unterschiedliche individuelle Muster aufweisen oder Individuen können markiert werden (z. B. mit Farbringen oder ungiftiger Farbe).
- Gestaltung der Innovation Arena
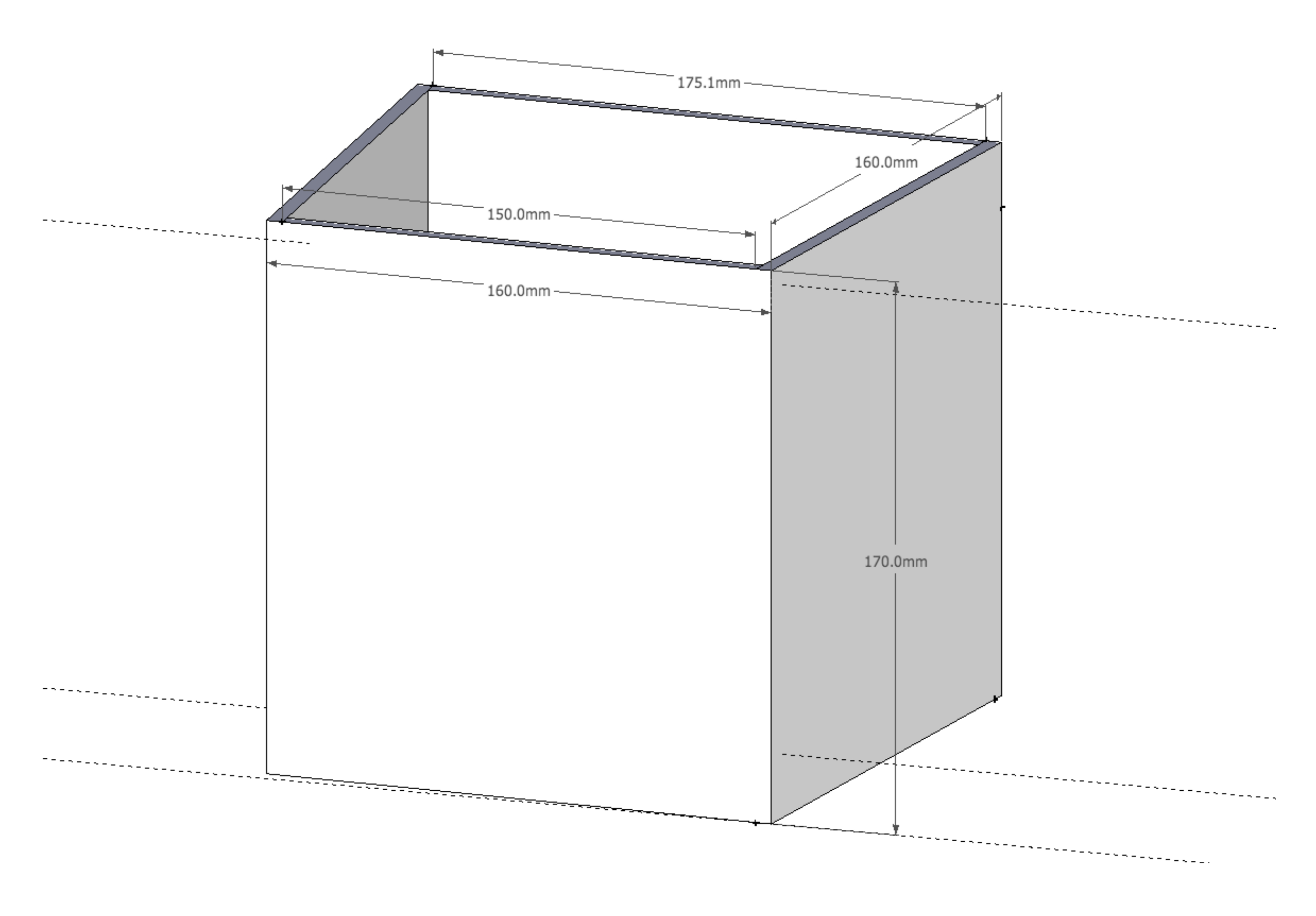
HINWEIS: Der gesamte Apparat, d.h. die Innovation Arena, besteht aus 20 verschiedenen Puzzleboxen, die in einem Halbkreis auf einer Holzplattform angeordnet sind.- Entwerfen Sie den Grundumriss der Boxen in einer Größe, die für die untersuchten Arten geeignet ist. Verwenden Sie transparente Boxen mit Trapezform (für eine einfache Ausrichtung in einem Halbkreis), abnehmbaren Deckeln (um das Ködern zwischen den Sitzungen zu ermöglichen) und abnehmbaren Basen (siehe Abbildung 1).
HINWEIS: Jede Basis bleibt später in einer permanenten Position, während der Rest der Boxen die Position ändert. In der vorgestellten Studie wurde die Größe der Boxen gewählt, um sicherzustellen, dass jedes Puzzle für die Kakadus leicht zugänglich ist. Die Abmessungen können für jede Studienart angepasst werden. - Entwerfen Sie eine Plattform für die 20 Puzzleboxen.
- Entwerfen Sie ein Befestigungssystem, das die Deckel der Boxen während des Tests an Ort und Stelle hält und daher von den Probanden während der Testsitzungen nicht entfernt werden kann.
HINWEIS: Es muss vom Gerät abnehmbar sein, da die Deckel der Kisten zum Ködern abgenommen werden müssen. - Entwerfen Sie für die Vorderseite jeder Box 20 verschiedene Aufgaben, von denen jede eine andere technische Herausforderung darstellt (siehe Abbildung 2).
HINWEIS: Die Aufgaben für dieses Experiment wurden mit dem Ziel entworfen, dass Lösungen in den morphologischen Bereich vieler verschiedener Arten fallen. Für die vergleichende Stärke wäre es ideal, Aufgaben so ähnlich wie möglich zu verwenden, aber denken Sie daran, dass es von noch größerer Bedeutung ist, dass die Aufgaben für die Probanden neu sind. Siehe die Materialtabelle für genaue Messungen und die ergänzende technische Zeichnung für eine detailliertere Darstellung der Aufgaben. - Erwerben Sie das gesamte Material, das für das Gerät benötigt wird.
- Stellen Sie sicher, dass Sie über eine Weitwinkelkamera, eine Kodierungssoftware (empfohlen, z. B. Interactive Software für die Verhaltensbeobachtungsforschung, BORIS34) und eine Software für die statistische Analyse (empfohlen, z. B. R35) verfügen.
HINWEIS: Für Feldstudien entwerfen Sie idealerweise die Arena, bevor Sie zum Studienort aufbrechen, und bringen Sie so viel wie möglich von der wesentlichen Ausrüstung, wie z.B. vorgeschnittenem Acrylglas, mit.
- Entwerfen Sie den Grundumriss der Boxen in einer Größe, die für die untersuchten Arten geeignet ist. Verwenden Sie transparente Boxen mit Trapezform (für eine einfache Ausrichtung in einem Halbkreis), abnehmbaren Deckeln (um das Ködern zwischen den Sitzungen zu ermöglichen) und abnehmbaren Basen (siehe Abbildung 1).

Abbildung 1: Diagramm einer einfachen dreiseitigen Box. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 2: Aufgaben der Innovation Arena mit entsprechender Beschreibung der motorischen Aktion, die zum Lösen erforderlich ist ( = Belohnung; rote Pfeile zeigen Richtungen von Aktionen an, die zur Lösung von Aufgaben erforderlich sind; gelbe Pfeile zeigen Belohnungstrajektorien an). Die Aufgaben sind nach ihrem mittleren Schwierigkeitsgrad angeordnet (von links nach rechts, von oben nach unten). Zuvor veröffentlicht in32. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
= Belohnung; rote Pfeile zeigen Richtungen von Aktionen an, die zur Lösung von Aufgaben erforderlich sind; gelbe Pfeile zeigen Belohnungstrajektorien an). Die Aufgaben sind nach ihrem mittleren Schwierigkeitsgrad angeordnet (von links nach rechts, von oben nach unten). Zuvor veröffentlicht in32. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}
2. Vorbereitungen
- Verkleben Sie drei Seiten der Boxen zusammen: links, hinten und rechts, aber nicht die Vorderseite, oben und Basis.
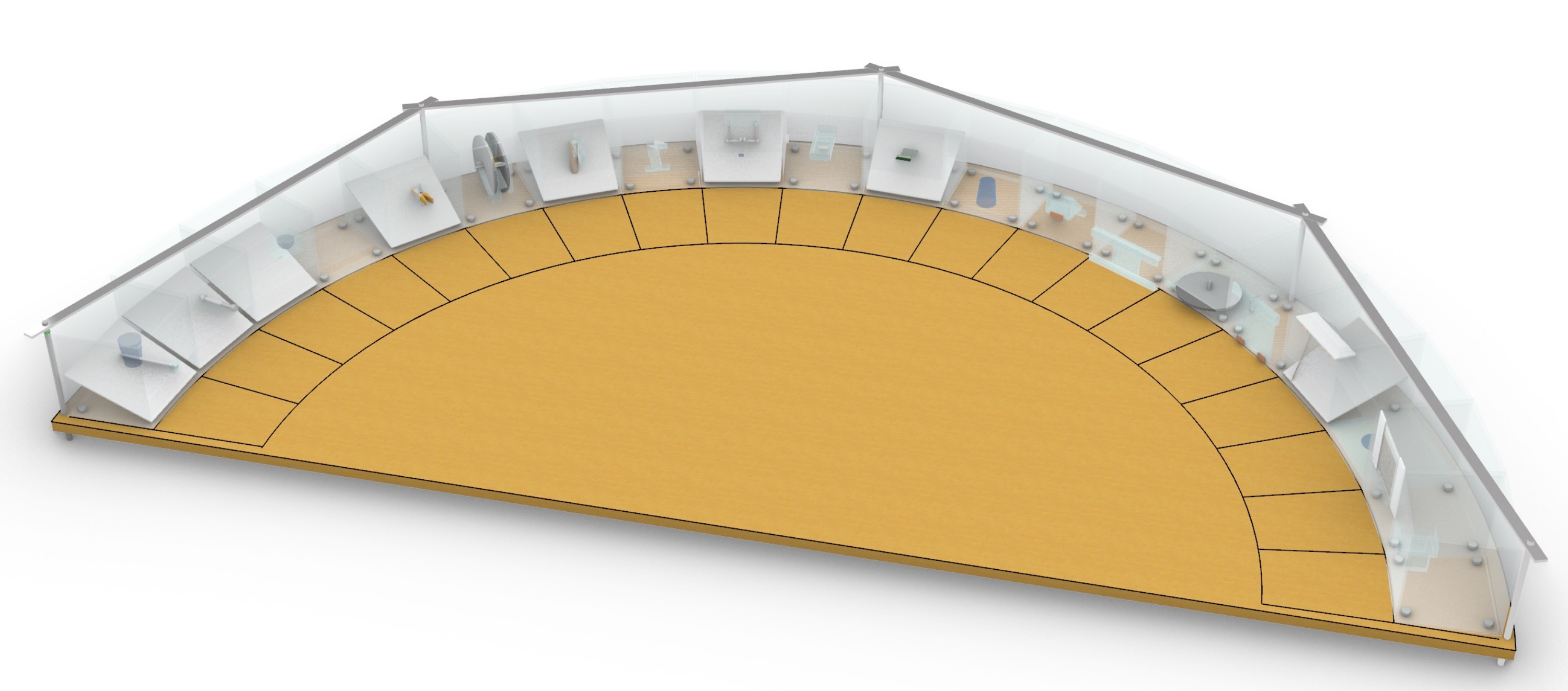
- Positionieren Sie jede dreiseitige Box auf jeder Basis und richten Sie sie gleichmäßig in einem Halbkreis auf der Plattform aus (Abbildung 3). Der vordere Teil jeder Box sollte 1 m von der Mitte entfernt sitzen.
HINWEIS: Die Mechanismen, aus denen sich die Aufgabe zusammensetzt (Frontseiten von Boxen und möglicher Inhalt), werden zu einem späteren Zeitpunkt während des Experiments hinzugefügt. - Zeichnen Sie eine Linie von jedem Kasten 20 cm in Richtung der Mitte der Arena und verbinden Sie die Linien, was zu einem Annäherungsraster führt (Abbildung 3).
HINWEIS: Abhängig von der Größe der Untersuchungsspezies kann eine andere Entfernung angemessener sein. Für die hier vorgestellte Studie wurden 20 cm gewählt, da es sich in etwa um die Länge eines Goffins handelt (Schwanzfedern ausgenommen). - Entfernen Sie alles außer den Basen der Boxen und befestigen Sie sie dauerhaft an der Plattform. Dadurch wird sichergestellt, dass die Boxen während des Experiments an Ort und Stelle bleiben.
- Befestigen Sie eine Weitwinkelkamera an der Decke über der Arena.
- Bereiten Sie einen Zeitplan für die Position jeder Box pro Sitzung und Thema vor. Jedes Thema wird immer mit allen Boxen konfrontiert, aber mit einer neuen Anordnung in jeder Sitzung. Der Standort (Positionen 1 bis 20) jeder Aufgabe sollte nach dem Zufallsprinzip zugewiesen werden, wobei die Einschränkung gilt, dass sich keine Box zweimal pro Subjekt an derselben Position befindet.
HINWEIS: Dies ist die ideale Situation. Wenn man die Testreihenfolge der Probanden nicht planen kann (was in Feldstudien wahrscheinlicher ist), muss diese Randomisierungsbeschränkung (keine Box an der gleichen Position zweimal) zwischen den Sitzungen (aber nicht innerhalb des Probanden) ausreichen.

Abbildung 3: Die Innovationsarena. Aufgaben, die in einem Halbkreis angeordnet sind; Die Positionen der 20 Aufgaben sind austauschbar. Ein Annäherungsraster (20 cm vor jeder Box) ist schwarz markiert. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}
3. Gewöhnung
HINWEIS: Der Zweck der Gewöhnung besteht darin, die Einflüsse neophober Reaktionen auf die Arena zu reduzieren. Stellen Sie ein Mindestgewöhnungsniveau für alle Probanden durch ein Gewöhnungsverfahren sicher, bei dem jeder Einzelne zwei Kriterien erreichen muss.
- Gewöhnung an nicht-funktionale Arena (bis Kriterium I)
- Positionieren Sie alle dreiseitigen Boxen auf den Basen, fügen Sie den Deckel jeder Box hinzu und halten Sie sie mit dem Fixiersystem (ohne das Subjekt vorhanden) an Ort und Stelle.
HINWEIS: Erwägen Sie, die Probanden in Stufen zu gewöhnen, die für jede Art geeignet sind, z. B. indem Sie schrittweise weitere Kisten zur Plattform hinzufügen, die Arena in ihrem Heimatbereich präsentieren, Belohnungen an jeder Position der Plattform platzieren, z. B. um, oben und mit den Kisten, oder konfrontieren Sie sie zuerst mit dem Gerät in größeren Gruppen und minimieren Sie allmählich die Gruppengröße. - Machen Sie die Probanden mit separaten Elementen der Aufgaben vertraut, die neophobe Reaktionen hervorrufen könnten.
HINWEIS: Diese separaten Elemente (d.h. alles außer den Grundkästen, der Plattform und dem Fixierungssystem) dürfen in diesem Stadium nicht zu Funktionsmechanismen kombiniert werden. - Platzieren Sie eine Belohnung in der Box (Mitte). Bringen Sie das Motiv in das Fach.
- Warten Sie auf die Länge einer Sitzung, ohne sich einzumischen. Probanden sollen jetzt die Belohnungen essen.
HINWEIS: Die Dauer dieser Gewöhnungssitzungen unterschied sich im Experiment: Langfristig gefangene Vögel erhielten 10 Minuten, während kurzfristig gefangene Kakadus 20 Minuten Zeit hatten, um die Belohnungen zu essen. Dies war notwendig, um eine wesentlich längere Fütterungszeit aufgrund unterschiedlicher Belohnungsarten zu berücksichtigen. Dieses Problem wurde später in den Testsitzungen anders behandelt (siehe Schritt 4.8). - Wiederholen Sie dies für jedes Fach (eine Sitzung pro Testtag), bis das Kriterium erreicht ist: Jeder Einzelne verbraucht alle Belohnungen aus dreiseitigen Boxen (eine Belohnung pro Box) innerhalb von drei aufeinanderfolgenden Sitzungen, während er visuell von der Gruppe isoliert ist.
- Positionieren Sie alle dreiseitigen Boxen auf den Basen, fügen Sie den Deckel jeder Box hinzu und halten Sie sie mit dem Fixiersystem (ohne das Subjekt vorhanden) an Ort und Stelle.
- Gewöhnung an funktionale Arena (bis Kriterium II)
- Kleben und befestigen Sie alle notwendigen Elemente dauerhaft an den Boxen, um sie zu funktionalen Puzzle-Boxen zu machen.
HINWEIS: Zu diesem Zeitpunkt ist die Arena wie in den Testsitzungen voll funktionsfähig. - Platzieren Sie die Boxen zufällig auf der Plattform (sie werden von den Basen an Ort und Stelle gehalten) und befestigen Sie die Deckel an den Boxen.
- Platzieren Sie eine Belohnung auf dem Deckel jeder Box an der Kante, die der Mitte der Arena am nächsten ist.
- Bringen Sie das Motiv in das Fach.
- Warten Sie auf die Länge einer Sitzung, ohne sich einzumischen.
HINWEIS: Die Probanden sollen jetzt die Belohnungen essen. - Wiederholen Sie dies für jedes Fach (eine Sitzung pro Testtag), bis das Kriterium erreicht ist.
HINWEIS: Kriterium II: Der Einzelne verbraucht alle Belohnungen von der Spitze der funktionalen Puzzleboxen (eine Belohnung pro Box) innerhalb einer Sitzung, während er visuell von der Gruppe isoliert ist. Dieses Kriterium II stellt sicher, dass die Probanden keine Angst vor der Arena haben, auch wenn neue Teile angebracht werden. Sie sollten jedoch nicht mit den Mechanismen interagieren und sollten unterbrochen werden, wenn sie dies tun.
- Kleben und befestigen Sie alle notwendigen Elemente dauerhaft an den Boxen, um sie zu funktionalen Puzzle-Boxen zu machen.
4. Testen
- Platzieren Sie die Boxen auf der Plattform gemäß dem Zufallsplan.
- Ködern Sie jede Aufgabe an der entsprechenden Stelle in den Boxen (siehe Abbildung 2).
HINWEIS: Der genaue Ort jeder Belohnung hängt von der jeweiligen Aufgabe ab und ist im Video zu sehen. - Befestigen Sie die Deckel an den Boxen und befestigen Sie sie mit dem Befestigungssystem (um sicherzustellen, dass die Probanden sie nicht abziehen können).
- Trennen Sie ein einzelnes Subjekt und bringen Sie es in den Testraum. Die Probanden werden einzeln getestet, um eine Beeinträchtigung des sozialen Lernens zu vermeiden.
- Positionieren Sie sie entweder auf der Startposition (dh dem Punkt, der in gleichem Abstand zu allen Aufgaben in der Mitte der Plattform liegt) oder setzen Sie einen Anreiz (z. B. eine Belohnung) an der Startposition, um sicherzustellen, dass das Thema dort beginnt.
- Starten Sie den Timer und warten Sie 20 Minuten (Sitzungsdauer), ohne das Motiv zu stören oder mit ihm zu interagieren. Das Thema kann so viele Aufgaben wie möglich lösen.
- Wenn das Subjekt mit nicht apparationsbezogenen Objekten abgelenkt wird, darf der Experimentator sie wieder an der Startposition der Arena platzieren (wenn möglich).
- Wenn das Subjekt länger als 3 s auf der Belohnung füttert, stoppen Sie den Timer, warten Sie, bis die Fütterung beendet ist, und setzen Sie dann das Timing fort.
HINWEIS: Dies geschieht, um sicherzustellen, dass die maximale Zeit, die zum Lösen von Aufgaben zur Verfügung steht, nicht durch die Fütterungszeit reduziert wird und daher für beide Gruppen gleich ist. - Wenn das Subjekt innerhalb der ersten 3 Minuten nicht mit einer Aufgabe interagiert und auch nicht aufgeregt ist, wenden Sie ein Motivationsprotokoll an (siehe Abschnitt 5).
- Sobald die 20 Minuten verstrichen sind (maximale Dauer einer Sitzung) oder der Teilnehmer alle Aufgaben gelöst hat, ist das Subjekt mit dem Testen für den Tag fertig und kann wieder in den Heimbereich entlassen werden.
- Wiederholen Sie diesen Vorgang am nächsten Testtag.
- Testen Sie jeden Einzelnen weiter, bis er entweder in den letzten fünf Sitzungen keine neue Aufgabe oder in 10 aufeinanderfolgenden Sitzungen überhaupt keine Aufgabe löst.
5. Motivationsprotokoll
HINWEIS: Wie oben beschrieben (Schritt 4.9), kann ein Motivationsprotokoll implementiert werden, wenn eine Person innerhalb der ersten 3 Minuten einer Sitzung nicht mit einer Aufgabe interagiert.
- Platziere drei Belohnungen über den Kästchen (wähle dafür ein Kästchen auf der linken, mittleren und rechten Seite). Wenn das Subjekt 3 Minuten nach dem Verbrauch der Belohnungen mit einer Aufgabe interagiert, setzen Sie die Sitzung fort (die Dauer von 20 Minuten beginnt an diesem Punkt).
- Wenn nicht, platzieren Sie fünf Belohnungen, die auf der Anfluglinie verteilt sind (d. H. Näherungsraster). Wenn das Subjekt 3 Minuten nach dem Verbrauch der Belohnungen mit einer Aufgabe interagiert, setzen Sie die Sitzung fort (die Dauer von 20 Minuten beginnt an diesem Punkt).
- Wenn nicht, platzieren Sie fünf Belohnungen an der Startposition. Wenn das Subjekt 3 Minuten nach dem Verbrauch der Belohnungen mit einer Aufgabe interagiert, setzen Sie die Sitzung fort (der 20-minütige Zeitrahmen beginnt an diesem Punkt).
- Wenn nicht, platzieren Sie eine Handvoll Belohnungen an der Startposition und beenden Sie die Testsitzung für diesen Tag (aber geben Sie dem Probanden etwas Zeit, um die Belohnungen zu konsumieren).
6. Analyse
- Verhaltenskodierung
- Vor der Analyse der Videos untersuchen Sie das Kodierungsprotokoll im Detail (Tabelle 1) und überlegen Sie, ob Anpassungen für die zu testende Art erforderlich sind.
HINWEIS: Die Beschreibungen der Codierungsvariablen sollten so spezifisch wie möglich sein, um Codierungsunterschiede zwischen verschiedenen Forschern zu vermeiden. - Kommentieren von Punktereignissen von: Anzahl der verschiedenen berührten Aufgaben (TasksTouched; Beachten Sie, dass die maximale Anzahl der berührten Aufgaben 20), die Anzahl der gelösten Aufgaben (TasksSolved), der Kontakt mit geköderten Aufgaben (BaitedContact) und der Kontakt mit gelösten Aufgaben (SolvedContact) beträgt.
- Kommentieren Sie die Wartezeit, bis das Subjekt die äußere Grenze der Gitterlinie (LatencyGrid) und die im Raster verbrachte Zeit (GridTime) überschreitet.
- Vor der Analyse der Videos untersuchen Sie das Kodierungsprotokoll im Detail (Tabelle 1) und überlegen Sie, ob Anpassungen für die zu testende Art erforderlich sind.
- Statistische Analyse
- Bestimmen Sie, ob Messgrößen für apparategesteuertes Verhalten (LatencyGrid, GridTime, TasksTouched, BaitedContact, SolvedContact) korreliert sind.
- Wenn ja, extrahieren Sie die Hauptkomponenten mithilfe einer Hauptkomponentenanalyse, bevor Sie sie als Prädiktoren in das Modell aufnehmen.
- Wenn sie nicht korreliert sind, schließen Sie sie separat als Prädiktoren in das Modell ein.
- Führen Sie ein verallgemeinertes lineares gemischtes Modell mit binomialer Fehlerstruktur und Logit-Link-Funktion36 aus. Um die Erfolgswahrscheinlichkeit vorherzusagen (d. h. die Antwortvariable ist SolvedTasks), passen Sie das Modell mit der maximalen zufälligen Steigungsstruktur an und schließen Sie zufällige Abschnitte für Subjekt, Aufgabe, einen kombinierten Faktor von Subjekt und Sitzung (SessionID) und einen kombinierten Faktor von Subjekt und Aufgabe (Subj.Task) ein, um eine Pseudoreplikation zu vermeiden. Verwenden Sie den Vergleich von Interesse (z. B. Arten) und den Hauptkomponenten als Prädiktorvariablen und steuern Sie die Sitzung. Berücksichtigen Sie mögliche Interaktionen.
- Um kryptische Mehrfachtestszu vermeiden 37 , vergleichen Sie das Modell zunächst mit einem Modell, dem alle festen Effekte von Interesse fehlen, bevor Sie einzelne Prädiktoren testen.
- Um einen Gesamtunterschied in der Schwierigkeit von Aufgaben zwischen Gruppen zu testen, vergleichen Sie das (vollständige) Modell mit einem, dem die zufällige Steigung der Gruppe innerhalb der Aufgabe fehlt.
Ergebnisse
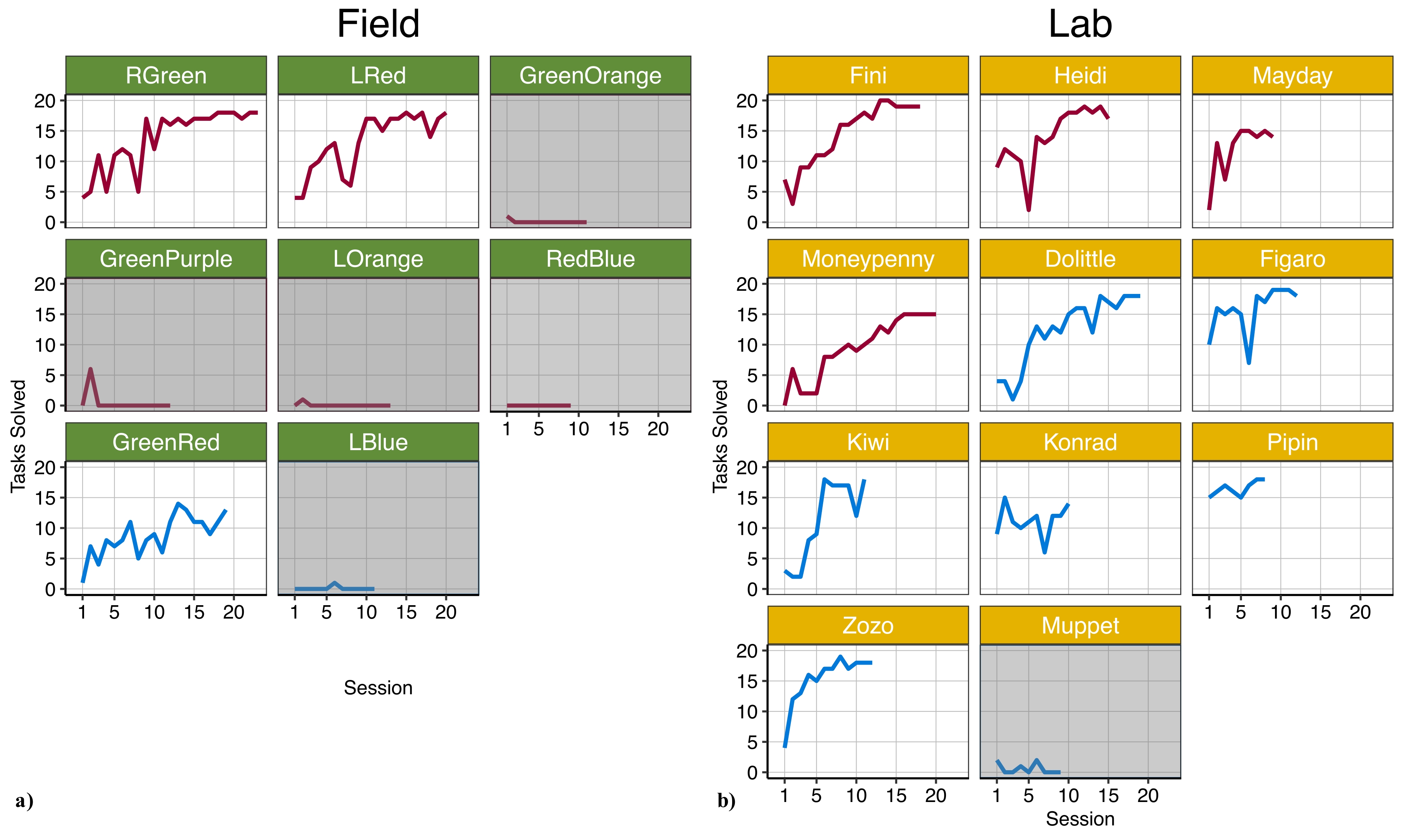
Neunzehn Probanden wurden mit der Innovation Arena getestet: 11 Langzeit- und 8 Kurzzeitkakadus in Gefangenschaft (Abbildung 4).

Abbildung 4: Eine Übersicht über die Anzahl der pro Sitzung gelösten Aufgaben für jeden Einzelnen . a) Feldgruppe, b) Laborgruppe. Rote Linien = weiblich; blaue Linien = männlich. Probanden, die das Motivationsprotokoll aufgrund ihrer Zurückhaltung, mit dem Gerät zu interagieren, erhielten, wurden als nicht motiviert eingestuft und mit einem grauen Hintergrund dargestellt. Zuvor veröffentlicht in Supplementary Information of32. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}
Die Hauptkomponentenanalyse ergab zwei Komponenten mit Eigenwerten oberhalb des Kaiserschen Kriteriums38 (siehe Tabelle 2 für die PCA-Ausgabe). PC1 wird mit der Häufigkeit der Kontakte mit Aufgaben, der in der Nähe (d. h. innerhalb des Rasters) der Aufgaben verbrachten Zeit und der Anzahl der berührten Aufgaben belastet. PC2 wurde positiv durch die Anzahl der Kontakte mit bereits gelösten Aufgaben und negativ durch die Anzahl der berührten, nicht gelösten Aufgaben beeinflusst. Solche aufgabengesteuerten Verhaltensweisen werden häufig zur Messung der Motivation verwendet (siehe12 für eine Überprüfung). Daher haben wir PC1 und PC2 als quantitative Messgrößen für die Motivation verwendet, mit dem Gerät in unserem Modell zu interagieren. Zusammen erklärten sie 76,7% der Varianz in apparategerichteten Verhaltensweisen und sowohl die Sitzung als auch die Sitzung beeinflussten signifikant die Wahrscheinlichkeit, Aufgaben zu lösen (PC1: Schätzung = 2,713, SE ± 0,588, χ 2= 28,64 , p < 0,001; PC2: Schätzung = 0,906, SE ± 0,315, χ2 = 9,106, p = 0,003; Sitzung: Schätzung = 1,719, SE ± 0,526, χ2 = 6,303, p = 0,001; siehe Abbildung 5; siehe Tabelle 4).

Abbildung 5: Einfluss von Kontrollprädiktoren auf die Lösungswahrscheinlichkeit: (a) PC1, (b) PC2, (c) Sitzung. Punkte zeigen beobachtete Daten, Fläche von Punkten gibt die Anzahl der Beobachtungen für jeden Datenpunkt an, gestrichelte Linien zeigen angepasste Werte des Modells und Bereiche symbolisieren Konfidenzintervalle des Modells. Zuvor veröffentlicht in32. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}
Sechs der 19 Probanden erhielten während des Experiments das Motivationsprotokoll (Labor: 1 von 11; Feld: 5 von 8). PC1 dieser Vögel, die wir als nicht motiviert einstuften, lag zwischen -2,934 und -2,2, während positive Werte für alle anderen motivierten Individuen gefunden wurden (Tabelle 3).
Mit der vorgestellten Methode fanden wir keinen Unterschied der Gruppe über die Wahrscheinlichkeit, die 20 technischen Problemlösungsaufgaben der Innovation Arena zu lösen (Schätzung = −0,089, SE ± 1,012, χ2 = 0,005, p = 0,945; Abbildung 5; Siehe Tabelle 4 für Schätzungen mit festen Effekten; alle Vögel inklusive).
Ein post-hoc-Vergleich des Modells mit einem, einschließlich eines Interaktionsbegriffs von Gruppe mit Sitzung (Schätzung = 2,924, SE ± 0,854, χ2 = 14,461, p < 0,001) deutet auf eine geringere Wahrscheinlichkeit hin, in der Feldgruppe in früheren Sitzungen zu lösen, aber nicht in den späteren. Dieser Unterschied in früheren Sitzungen könnte auf die hohe Anzahl von weniger / nicht motivierten Vögeln im Gruppenfeld zurückzuführen sein (Personen, für die die Tests aufgrund der Regel gestoppt wurden, keine Aufgabe in 10 aufeinanderfolgenden Sitzungen zwischen 10 und 13 Sitzungen zu lösen).
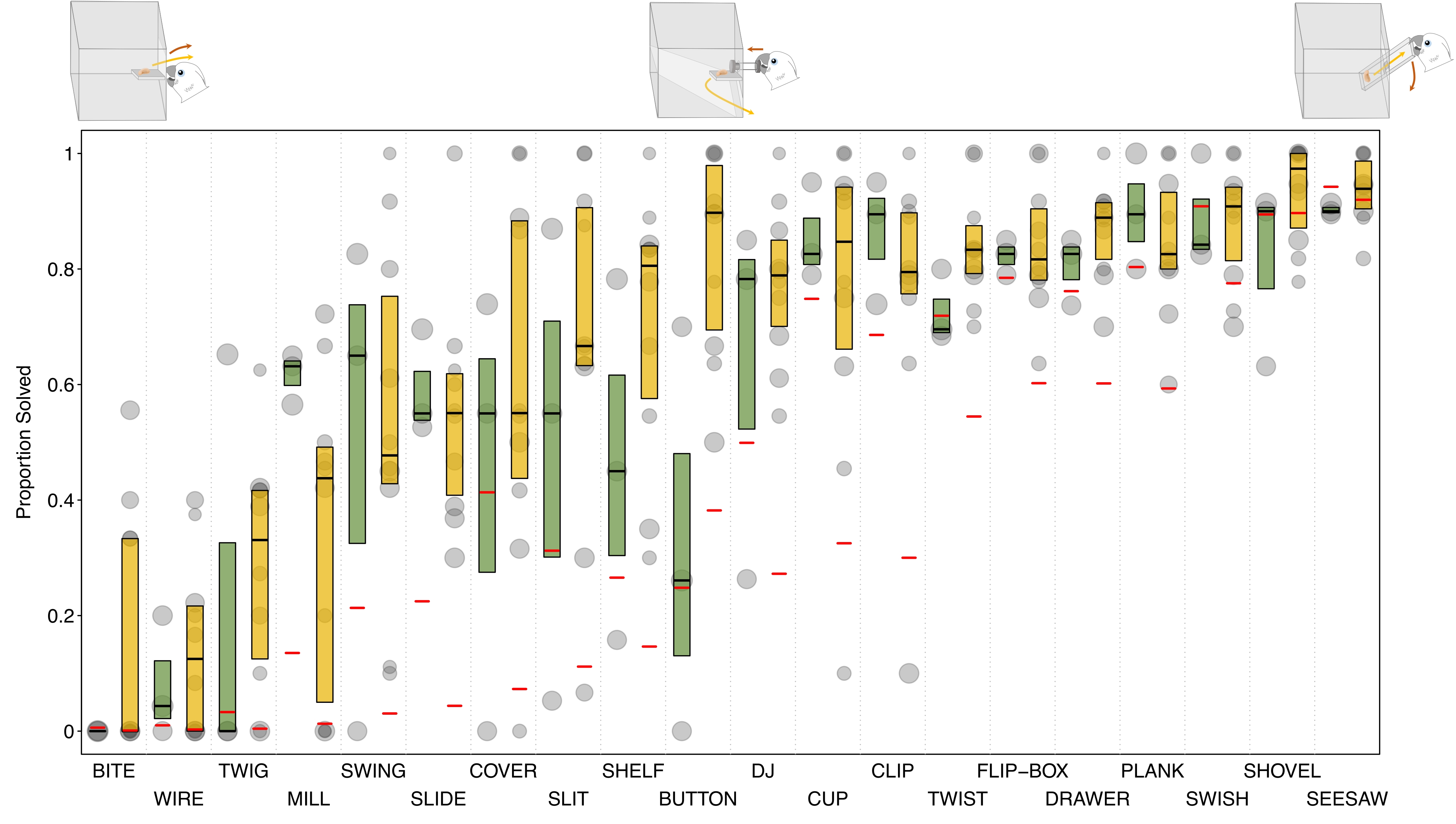
Darüber hinaus fanden wir keinen Unterschied zwischen den Gruppen in Bezug auf die Gesamtschwierigkeit der Aufgaben (Vergleich des vollständigen Modells mit allen enthaltenen Vögeln, wobei ein reduziertes Modell keine zufällige Steigung der Gruppe innerhalb der Aufgabe aufweist: χ2 = 7,589, df = 5, p = 0,18). Visuelle Vergleiche von Vögeln, die nie einen Motivationsversuch erforderten, deuten jedoch auf einige Unterschiede in der Fähigkeit einzelner Einzelaufgaben hin (siehe z. B. die Button-Aufgabe in Abbildung 6).

Abbildung 6: Beobachtete Daten motivierter Probanden und angepasste Werte des Modells pro Aufgabe und Gruppe: Boxplots zeigen den Anteil der Erfolge pro Aufgabe für beide Gruppen (grün = Feld; orange = Lab). Fette horizontale Linien zeigen Medianwerte an, Kästchen reichen vom ersten bis zum dritten Quartil für Vögel. Boxplots veranschaulichen nur Daten von motivierten Vögeln (um die visuelle Klarheit zu verbessern). Einzelne Beobachtungen werden durch Punkte dargestellt (größere Fläche zeigt mehr Beobachtungen pro Datenpunkt an). Rote horizontale Linien zeigen angepasste Werte. Angepasste Werte stammen aus dem gesamten Datensatz. Enthalten sind Abbildungen der Aufgaben Bite (unten links), Button (oben Mitte) und Seesaw (oben rechts). Zuvor veröffentlicht in32. Bitte klicken Sie hier, um eine größere Version dieser Abbildung zu sehen.
{kind=link}
Diese Ergebnisse belegen die Machbarkeit der Methodik für vergleichende Forschungen, auch wenn die Tiere unterschiedliche Erfahrungen und ökologische Umstände haben. Ein Vergleich innovativer Problemlösungsfähigkeiten mit nur einer einzigen Aufgabe, wie der Button-Aufgabe, könnte zu einer falschen Schlussfolgerung geführt haben, dass langfristig gefangene Vögel bessere Problemlöser sind. Dieser Unterschied könnte durch die Erfahrung der Laborpopulation mit Stick-Insertionsexperimenten erklärt werden, während die motorische Aktion für Wildpopulationen möglicherweise nicht so ökologisch relevant ist. Solche Unterschiede könnten beim Vergleich verschiedener Arten möglicherweise ausgeprägter sein (siehe19). Darüber hinaus konnten wir testen, wie sich Motivation auf die Problemlösungsfähigkeit auswirkt, während wir gleichzeitig die Ergebnisse der beiden Gruppen verglichen und gleichzeitig die Motivation kontrollierten.
Die 20 technischen Probleme der Innovation Arena können daher genutzt werden, um Gruppenunterschiede bei bestimmten Aufgaben zu erkennen, aber auch die allgemeine Innovationsfähigkeit von Gruppen abzuschätzen. Im Falle des Goffin-Kakadus können beide Gruppen, d.h. die Fähigkeit, viele Belohnungen zu erhalten, wenn sie wollen, d.h. motiviert sind, mit dem Apparat zu interagieren.
Tabelle 1: Protokoll für das Codierungsverhalten: Detaillierte Beschreibung der codierten Verhaltensvariablen. Zuvor veröffentlicht in32. Bitte klicken Sie hier, um diese Tabelle herunterzuladen.
Tabelle 2: Ausgabe der Hauptkomponente: Faktorbelastungen über 0,40 sind fett gedruckt. Zuvor veröffentlicht in32. Bitte klicken Sie hier, um diese Tabelle herunterzuladen.
Tabelle 3: Details zu Themen und Werten aufgabengesteuerter Verhaltensweisen und Hauptkomponenten: Hochgestellt, wenn Messlasten über 0,40 pro PC liegen. Zuvor veröffentlicht in32. Bitte klicken Sie hier, um diese Tabelle herunterzuladen.
Tabelle 4: Feste Effekte Ergebnisse des Modells für die Wahrscheinlichkeit zu lösen. Zuvor veröffentlicht in32. Bitte klicken Sie hier, um diese Tabelle herunterzuladen.
Ergänzende Datei: Technische Zeichnung der Innovationsarena (InnovationArena.3dm). Die Abmessungen können leicht abweichen. Kann z.B. in 3dviewer.net geladen werden, das ist ein freier und quelloffener 3D-Modell-Viewer39. Bitte klicken Sie hier, um diese Datei herunterzuladen.
Diskussion
Die Innovation Arena ist ein neues Protokoll, um innovative, technische Problemlösungen zu testen. Bei der Gestaltung der Aufgaben der Innovation Arena haben wir sorgfältig überlegt, dass die Aufgaben angesichts der morphologischen Einschränkungen einer Reihe von Arten (z. B. Verwendung von Schnäbeln, Schnauzen, Pfoten, Klauen oder Händen) gelöst werden können. Um eine breitere Vergleichbarkeit zwischen bereits getesteten und in Zukunft zu testenden Arten zu ermöglichen, empfehlen wir die Nutzung dieser Aufgaben, sofern dies mit dem jeweiligen Modell machbar ist. Wir sind uns jedoch bewusst, dass einige Aufgaben möglicherweise an bestimmte morphologische Grenzen einer Art angepasst werden müssen. Am wichtigsten ist, dass die Aufgaben für die Fächer neu sein müssen, was neue, alternative Designs erfordern kann. Ein Vorteil der Innovation Arena ist, dass aufgrund der Vielzahl unterschiedlicher Aufgaben Vergleiche auch dann möglich und informativ sein werden, wenn einige Aufgaben in zukünftigen Studien angepasst oder geändert werden müssen.
Bei der Planung der Studie sollte berücksichtigt werden, dass die Vortestphase (z. B. Entwurf und Bau des Geräts) viel Zeit in Anspruch nehmen kann. Darüber hinaus ist es wichtig, die Subjekte gründlich an den Apparat zu gewöhnen. Verschiedene Gruppen können sich in ihrem explorativen Ansatz und ihren neotischen Reaktionen erheblich unterscheiden40,41,42. Die Beseitigung (oder Reduktion) neophober Reaktionen wird Vergleiche zuverlässiger machen und es ermöglichen, die Rolle der Motivation zu identifizieren. Um die individuelle Entstehung von Innovationen im Zeitverlauf zu messen und soziales Lernen zu vermeiden, ist es entscheidend, dass Probanden wiederholt und individuell getestet werden, was unter Feldbedingungen eine Herausforderung darstellen kann. Für viele Arten benötigen wild gefangene Probanden viel Zeit, um sich an die neue Umgebung, die menschliche Präsenz und Interaktion zu gewöhnen und ein funktionierendes Trennverfahren zu entwickeln. Darüber hinaus ist es praktisch nicht möglich, den Randomisierungsplan für jede Person pro Sitzung strikt einzuhalten. Während die langfristig in Gefangenschaft gehaltenen Kakadus in unserer Studie darauf trainiert wurden, das Testfach zu betreten, wenn sie mit ihrem individuellen Namen aufgerufen wurden, mussten wir opportunistischer sein, welche Person den Testraum im Feld betritt. Neben der Motivation stießen wir auf einen weiteren Faktor, der die Ergebnisse einer vergleichenden Studie mit der Innovation Arena beeinflussen könnte. Aufgrund von Fütterungspräferenzen und Futterverfügbarkeit verwendeten wir für die beiden Gruppen unterschiedliche Belohnungsarten, was die Fütterungszeiten von wilden Kakadus im Vergleich zu den Laborvögeln erhöhte. Wir haben diese Unterschiede berücksichtigt, indem wir die Fütterungsdauer (wenn sie 3 s überschritten hat) zu der Gesamtzeit addierten, in der eine Person mit der Arena konfrontiert wurde. Dieses Protokoll stellte sicher, dass die Zeit für die Interaktion mit der Arena in einer Gruppe nicht aufgrund der Fütterungszeit verkürzt wurde. Zukünftige Studien sollten dieses potenzielle Problem berücksichtigen und könnten darauf abzielen, dieses Protokoll bereits in der Gewöhnungsphase umzusetzen.
Die Stärke und Neuheit dieser Methode umfasst die Kombination einer größeren Vielfalt von Aufgaben, die gleichzeitige Präsentation dieser Aufgaben, mehrere Belohnungen pro Begegnung mit dem Gerät und die wiederholte Exposition gegenüber dem Gerät für jedes Subjekt.
Darüber hinaus werden Einzelpersonen getestet, bis sie keine neuen Aufgaben mehr lösen. Im Gegensatz zu einer festen Anzahl von Sitzungen kann diese maximale (oder asymptotische Ebene) der Lösungsfindung zusammen mit der Anzahl der pro Sitzung gelösten Aufgaben aufschlussreich über die mögliche Anpassung einer Gruppe an eine sich ändernde Umgebung sein.
Ein Beispiel für eine alternative Methode ist die Multi Access Box (MAB), bei der es möglich ist, eine Aufgabe durch vier verschiedene Lösungen zu lösen, aber nur eine Belohnung pro Begegnung mit dem Gerät18 abgerufen werden kann und somit die Schätzung der Innovationsrate im Laufe der Zeit signifikant begrenzt ist. Darüber hinaus können Schwierigkeiten mit einzelnen Aufgaben, die artspezifisch sein können, den Leistungsvergleich in Bezug auf kognitive Fähigkeiten stark beeinflussen. Unseres Wissens wurde die gleichzeitige Darstellung von Aufgaben mit motorisch unterschiedlichen Lösungen in früheren Studien auf maximal sechs Aufgaben beschränkt (Federspiel, 6-Wege-MAB zu Mynah-Vögeln, bisher unveröffentlichte Daten). Während das MAB ein sehr nützliches Werkzeug ist, um Explorationstechniken aufzudecken, denken wir, dass die Innovation Arena besser für den Vergleich der Innovationsfähigkeit selbst geeignet ist. Ein breiteres Spektrum von Aufgaben, die auch im Schwierigkeitsgrad variieren, kann informativer über eine technische Gesamtlösungskompetenzsein 29.
In unserer ersten Studie verglichen wir erfolgreich zwei Gruppen derselben Art, den Goffin-Kakadu, die sich in ihrer Erfahrung erheblich unterschieden. Mit diesem Vergleich haben wir gezielt die Frage ins Visier genommen, ob langfristige Gefangenschaft die Problemlösungsfähigkeit beeinflusst. Frühere Studien haben gezeigt, dass ein längerer Lebensstil in Gefangenschaft diese Fähigkeiten verbessert (siehe30,43), aber direkte Vergleiche durch kontrollierte experimentelle Ansätze waren selten (sieheaber 44,45). Durch die Nutzung der Innovation Arena konnten wir diese Frage angehen und fanden keine Unterstützung für einen Captivity-Effekt auf die Gesamtfähigkeit von Goffins, neue Lösungen zu finden, sondern eher einen Effekt auf einer Motivationsebene32.
Darüber hinaus kann die Innovation Arena genutzt werden, um Fragen zu beantworten, die sich auf verschiedene Aspekte innovativer Problemlösung konzentrieren. Weitere Schritte könnten Untersuchungen umfassen, die sich mit den Auswirkungen von Divergenz und Konvergenz befassen. Zum Beispiel Vergleiche zwischen eng verwandten Arten, die sich in ihren Ökologien unterscheiden (z. B. Inselarten vs. Nicht-Inselarten), aber auch entfernt verwandten Arten, wie einem Papagei und einem Korbenvertreter oder Vogel- und Primatenarten, die zuvor ähnliche Leistungen bei der individuellen physischen Problemlösung zeigten46. Die Innovation Arena wurde entwickelt, um viele verschiedene Arten zu vergleichen, auch solche, die entfernt verwandt sind.
Allerdings könnte diese Methode sehr wohl auch zur Untersuchung interindividueller Unterschiede eingesetzt werden. Zum Beispiel könnte man Persönlichkeitswerte als Prädiktoren verwenden, um ihren Einfluss auf die Innovationsrate abzuschätzen. Wir glauben, dass die vorgestellte Methode von Forschungsgruppen verwendet werden kann, die tierische und menschliche Innovationen untersuchen, und / oder kollaborativ von Labors, die sich auf das Studium verschiedener Arten spezialisiert haben.
Offenlegungen
Die Autoren erklären keine Interessenkonflikte.
Danksagungen
Wir danken Stefan Schierhuber und David Lang für ihre Unterstützung bei der Produktion dieses Videos, Christoph Rössler für seine Hilfe bei technischen Zeichnungen und Poppy Lambert für das Korrekturlesen dieses Manuskripts. Diese Publikation wurde gefördert durch den Fonds zur Förderung der wissenschaftlichen Forschung (FWF; START-Projekt Y01309 an A.A. vergeben. Die vorgestellte Forschung wurde vom Fonds zur Förderung der wissenschaftlichen Forschung (FWF; Projekte P29075 und P29083 an A.A. und Projekt J 4169-B29 an M.O.) sowie vom Wiener Wissenschafts- und Technologiefonds (WWTF; Projekt CS18-023 an A.A. vergeben) finanziert.
Materialien
| Name | Company | Catalog Number | Comments |
| wooden platform | Dimensions: wooden semicircle, radius approx. 1.5m | ||
| FIXATION SYSTEM | |||
| 5 x metal nut | Dimensions: M8 | ||
| 5 x rod | (possibly with U-profile) | ||
| 5 x threaded rod | Dimensions: M8; length: 25cm | ||
| 5 x wing nut | Dimensions: M8 | ||
| PUZZLE BOXES WITHOUT FUNCTION PARTS | |||
| 20 x acrylic glass back | Dimensions: 17cm x 17.5cm x 0.5cm | ||
| 20 x acrylic glass base | 4 holes for screws roughly 2cm from each side Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| 20 x acrylic glass front | acrylic glass fronts need to be cut differently for each puzzle box (see drawing) Dimensions: 17cm x 15cm x 0.5cm | ||
| 20 x acrylic glass lid | cut out 0.5cm at the edges for better fit Dimensions: trapezoid shape: 18.5cm x 16cm x 16cm x 1cm (thick) | ||
| 40 x acrylic glass side | Dimensions: 17cm x 16cm x 0.5cm | ||
| 80 x small screw | to attach bases to the platform (4 screws per base) | ||
| PARTS FOR EACH MECHANSIM PER TASK | |||
| to assemble the parts use technical drawing InnovationArena.3dm | can be loaded e.g. in 3dviewer.net, which is a free and open source 3D model viewer. github repository: https://github.com/kovacsv/Online3DViewer; please contact authors if you are in need of a different format | ||
| TASK TWIST | |||
| 5x small nut | to attach glass (punch holes) and acrylic glass cube to threaded rod | ||
| acrylic glass | Dimensions: 2cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5cm; base diameter: 3cm | ||
| thin threaded rod | Dimensions: length: approx. 10cm | ||
| TASK BUTTON | |||
| 2x nut | attach to rod; glue outer nut to rod Dimensions: M8 | ||
| acrylic glass | V-cut to facilitate sliding of rod Dimensions: 4cm x 3cm x 1cm (0.5cm V-cut in the middle) | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| threaded rod | Dimensions: M8, length: 5cm | ||
| TASK SHELF | |||
| acrylic glass top | Dimensions: 5cm x 4cm x 0.3cm | ||
| acrylic glass lower | Dimensions: 5cm x 4cm x 1cm | ||
| acrylic glass side 1 | Dimensions: 4cm x 3cm x 0.5cm | ||
| acrylic glass side 2 | Dimensions: 4.5cm x 3cm x 0.5cm | ||
| thin plastic bucket | one side cut off to fit Dimensions: diameter: approx. 4.5 cm; height: 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| TASK SLIT | room to reach in: 2cm in height | ||
| - | recommended: add small plastic barrier behind reward so it cannot be pushed further into the box | ||
| TASK CLIP | |||
| 2x acrylic glass | Dimensions: 1cm x 1cm x 2cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| peg | Dimensions: length: approx. 6 cm | ||
| thin threaded rod | Dimensions: length: approx. 6 cm | ||
| TASK MILL | |||
| 2x arylic glass triangle | Dimensions: 10cm x 7.5cm x 7.5cm; thickness: 1cm | ||
| 2x plastic disc | Dimensions: diameter: 12cm | ||
| 4x small nut | for attachment | ||
| 7x acrylic glass | Dimensions: 4.5cm x 2cm, 0.5cm | ||
| acrylic glass long | position the mill with longer acrylic glass touching lower half of the front (this way the mill can only turn in one direction) Dimensions: 6.5cm x 2cm, 0.5cm | ||
| thin threaded rod | Dimensions: length: approx. 4cm | ||
| wooden cylinder | Dimensions: diameter: 2cm | ||
| TASK SWISH | |||
| 2x acrylic glass | Dimensions: 2cm x 1cm x 1cm | ||
| 4x small nut | for attachment | ||
| acrylic glass | Dimensions: 10cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin threaded rod | Dimensions: length: approx. 7cm | ||
| wooden cylinder | Dimensions: diameter: 2cm, cut-off slantwise; longest part: 7cm, shortest part: 5cm | ||
| TASK SHOVEL | |||
| acrylic glass | Dimensions: 20cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 7.5cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 5cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SWING | |||
| 4x nut | Dimensions: M8 | ||
| acrylic glass | Dimensions: 7.5cm x 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| cord strings | Dimensions: 2x approx. 11cm | ||
| thin bent plastic | bucket to hold reward; positioned on slant | ||
| threaded rod | Dimensions: M8; length: 7cm | ||
| TASK SEESAW | |||
| 2x acrylic glass | Dimensions: 10cm x 1.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 1.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 10cm x 3cm x 0.5cm | ||
| acrylic glass | Dimensions: 4cm x 1.5cm x 1cm | ||
| small hinge | |||
| TASK PLANK | |||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin tin | bent approx. 1cm inside box Dimensions: 6.5cm x 3cm | ||
| TASK CUP | |||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5; base diameter: 3cm | ||
| TASK FLIP-BOX | |||
| 2x acrylic glass triangle | Dimensions: 7cm x 5cm x 5cm; thickness: 0.5cm | ||
| 2x acrylic glass | Dimensions: 4.5cm x 5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 7cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SLIDE | |||
| 4x acrylic glass | Dimensions: 15cm x 1cm x 0.5cm | ||
| acrylic glass door | Dimensions: 6cm x 6cm x 0.5cm | ||
| TASK DJ | |||
| 2x small nut | for attachment | ||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| plastic disc | Dimensions: diameter 12cm | ||
| thin threaded rod | Dimensions: length: approx. 3cm | ||
| TASK WIRE | |||
| acrylic glass | Dimensions: 9.5cm x 9.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 12cm x 2cm x 1cm | ||
| 2x small hinge | |||
| wire from a paperclip | |||
| TASK TWIG | |||
| 2x small hinge | |||
| acrylic glass | Dimensions: 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| white cardboard | Dimensions: 13cm x 4cm | ||
| Y-shaped twig | Dimensions: length: approx. 14cm | ||
| TASK COVER | |||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| thin plastic | Dimensions: diameter: 5cm | ||
| TASK BITE | recommended: put tape on sides of platform the keep reward from falling off | ||
| 2-3 paper clips | |||
| 2x cutout from clipboard | Dimensions: 10cm x 3cm | ||
| acrylic glass | hole in middle Dimensions: 5cm x 3cm x 1cm | ||
| toilet paper | |||
| TASK DRAWER | |||
| 2x acrylic glass | Dimensions: 5cm x 2.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 3cm x 1cm | ||
| acrylic glass | hole approx. 2 cm from front Dimensions: 5cm x 5cm x 1cm | ||
| OTHER MATERIAL | |||
| wide-angle videocamera |
Referenzen
- Fisher, J. The opening of milkbottles by birds. British Birds. 42, 347-357 (1949).
- Kummer, H., Goodall, J. Conditions of innovative behaviour in primates. Philosophical Transactions of the Royal Society of London. B, Biological Sciences. 308 (1135), 203-214 (1985).
- Tebbich, S., Griffin, A. S., Peschl, M. F., Sterelny, K. From mechanisms to function: an integrated framework of animal innovation. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150195 (2016).
- Reader, S. M., Laland, K. N. Social intelligence, innovation, and enhanced brain size in primates. Proceedings of the National Academy of Sciences. 99 (7), 4436-4441 (2002).
- Reader, S. M., Laland, K. N. Primate innovation: Sex, age and social rank differences. International Journal of Primatology. 22 (5), 787-805 (2001).
- Lefebvre, L., Whittle, P., Lascaris, E., Finkelstein, A. Feeding innovations and forebrain size in birds. Animal Behaviour. 53 (3), 549-560 (1997).
- Lefebvre, L., et al. Feeding innovations and forebrain size in Australasian birds. Behaviour. 135 (8), 1077-1097 (1998).
- Timmermans, S., Lefebvre, L., Boire, D., Basu, P. Relative size of the hyperstriatum ventrale is the best predictor of feeding innovation rate in birds. Brain, Behavior and Evolution. 56 (4), 196-203 (2000).
- Ducatez, S., Clavel, J., Lefebvre, L. Ecological generalism and behavioural innovation in birds: technical intelligence or the simple incorporation of new foods. Journal of Animal Ecology. 84 (1), 79-89 (2015).
- Sol, D., Lefebvre, L., Rodríguez-Teijeiro, J. D. Brain size, innovative propensity and migratory behaviour in temperate Palaearctic birds. Proceedings of the Royal Society B: Biological Sciences. 272 (1571), 1433-1441 (2005).
- Sol, D., Sayol, F., Ducatez, S., Lefebvre, L. The life-history basis of behavioural innovations. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150187 (2016).
- Griffin, A. S., Guez, D. Innovation and problem solving: A review of common mechanisms. Behavioural Processes. 109, 121-134 (2014).
- Laumer, I. B., Bugnyar, T., Reber, S. A., Auersperg, A. M. I. Can hook-bending be let off the hook? Bending/unbending of pliant tools by cockatoos. Proceedings of the Royal Society B. Biological Sciences. 284 (1862), 20171026 (2017).
- Rutz, C., Sugasawa, S., Vander Wal, J. E. M., Klump, B. C., St Clair, J. J. H. Tool bending in New Caledonian crows. Royal Society Open Science. 3 (8), 160439 (2016).
- Weir, A. A. S., Kacelnik, A. A New Caledonian crow (Corvus moneduloides) creatively re-designs tools by bending or unbending aluminium strips. Animal Cognition. 9 (4), 317-334 (2006).
- Herrmann, E., Hare, B., Call, J., Tomasello, M. Differences in the cognitive skills of bonobos and chimpanzees. PloS One. 5 (8), 12438 (2010).
- Herrmann, E., Call, J., Hernández-Lloreda, M. V., Hare, B., Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science. 317 (5843), 1360-1366 (2007).
- Auersperg, A. M. I., Gajdon, G. K., von Bayern, A. M. P. A new approach to comparing problem solving, flexibility and innovation. Communicative & Integrative Biology. 5 (2), 140-145 (2012).
- Auersperg, A. M. I., von Bayern, A. M. P., Gajdon, G. K., Huber, L., Kacelnik, A. Flexibility in problem solving and tool use of Kea and New Caledonian crows in a multi access box paradigm. PLoS One. 6 (6), 20231 (2011).
- Daniels, S. E., Fanelli, R. E., Gilbert, A., Benson-Amram, S. Behavioral flexibility of a generalist carnivore. Animal Cognition. 22 (3), 387-396 (2019).
- Johnson-Ulrich, L., Holekamp, K. E., Hambrick, D. Z. Innovative problem-solving in wild hyenas is reliable across time and contexts. Scientific Reports. 10 (1), 13000 (2020).
- Johnson-Ulrich, L., Johnson-Ulrich, Z., Holekamp, K. Proactive behavior, but not inhibitory control, predicts repeated innovation by spotted hyenas tested with a multi-access box. Animal Cognition. 21 (3), 379-392 (2018).
- Williams, D. M., Wu, C., Blumstein, D. T. Social position indirectly influences the traits yellow-bellied marmots use to solve problems. Animal Cognition. 24 (4), 829-842 (2021).
- Cooke, A. C., Davidson, G. L., van Oers, K., Quinn, J. L. Motivation, accuracy and positive feedback through experience explain innovative problem solving and its repeatability. Animal Behaviour. 174, 249-261 (2021).
- Huebner, F., Fichtel, C. Innovation and behavioral flexibility in wild redfronted lemurs (Eulemur rufifrons). Animal Cognition. 18 (3), 777-787 (2015).
- Godinho, L., Marinho, Y., Bezerra, B. Performance of blue-fronted amazon parrots (Amazona aestiva) when solving the pebbles-and-seeds and multi-access-box paradigms: ex situ and in situ experiments. Animal Cognition. 23 (3), 455-464 (2020).
- Bouchard, J., Goodyer, W., Lefebvre, L. Social learning and innovation are positively correlated in pigeons (Columba livia). Animal Cognition. 10 (2), 259-266 (2007).
- Griffin, A. S., Diquelou, M., Perea, M. Innovative problem solving in birds: a key role of motor diversity. Animal Behaviour. 92, 221-227 (2014).
- Webster, S. J., Lefebvre, L. Problem solving and neophobia in a columbiform-passeriform assemblage in Barbados. Animal Behaviour. 62 (1), 23-32 (2001).
- Haslam, M. 34;Captivity bias" in animal tool use and its implications for the evolution of hominin technology. Philosophical Transactions of the Royal Society B: Biological Sciences. 368 (1630), 20120421 (2013).
- Lambert, M. L., Jacobs, I., Osvath, M., von Bayern, A. M. P. Birds of a feather? Parrot and corvid cognition compared. Behaviour. , 1-90 (2018).
- Rössler, T., et al. Using an Innovation Arena to compare wild-caught and laboratory Goffin´s cockatoos. Scientific Reports. 10 (1), 8681 (2020).
- Laumer, I. B., Bugnyar, T., Auersperg, A. M. I. Flexible decision-making relative to reward quality and tool functionality in Goffin cockatoos (Cacatua goffiniana). Scientific Reports. 6, 28380 (2016).
- Friard, O., Gamba, M. BORIS: a free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- R. Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. , (2020).
- McCullagh, P., Nelder, J. A. Generalized linear models. Monographs on Statistics and Applied Probability. , (1989).
- Forstmeier, W., Schielzeth, H. Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner's curse. Behavioral Ecology and Sociobiology. 65 (1), 47-55 (2011).
- Kaiser, H. F. The application of electronic computers to factor analysis. Educational and Psychological Measurement. 20 (1), 141-151 (1960).
- . Online 3D Viewer Available from: https://github.com/lovacsv/Online3DViewer (2021)
- Greenberg, R. S., Mettke-Hofmann, C. Ecological aspects of neophobia and neophilia in birds. Current Ornithology. 16, 119-169 (2001).
- Mettke-Hofmann, C., Winkler, H., Leisler, B. The Significance of Ecological Factors for Exploration and Neophobia in Parrots. Ethology. 108 (3), 249-272 (2002).
- O'Hara, M., et al. The temporal dependence of exploration on neotic style in birds. Scientific Reports. 7 (1), 4742 (2017).
- Chevalier-Skolnikoff, S., Liska, J. O. Tool use by wild and captive elephants. Animal Behaviour. 46 (2), 209-219 (1993).
- Benson-Amram, S., Weldele, M. L., Holekamp, K. E. A comparison of innovative problem-solving abilities between wild and captive spotted hyaenas, Crocuta crocuta. Animal Behaviour. 85 (2), 349-356 (2013).
- Gajdon, G. K., Fijn, N., Huber, L. Testing social learning in a wild mountain parrot, the kea (Nestor notabilis). Animal Learning and Behavior. 32 (1), 62-71 (2004).
- Shettleworth, S. J. . Cognition, Evolution, and Behavior. , (2009).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten