
Method Article
イノベーションアリーナ:グループ間で革新的な問題解決を比較する方法
要約
イノベーションアリーナは、動物の時間単位あたりの技術革新率を研究するための新しい比較方法です。これは、同時に提示される20の異なる問題解決タスクで構成されています。イノベーションは自由に行うことができ、セットアップは個人、集団、または種レベルでの素因に関して堅牢です。
要約
問題解決タスクは、技術的で革新的な行動を調査するために一般的に使用されますが、幅広い種にわたってこの能力を比較することは困難な作業です。種の形態学的ツールキットや探査技術などの特定の素因は、そのようなタスクのパフォーマンスに実質的に影響する可能性があり、直接的な比較を困難にします。ここで提示された方法は、そのような種固有の違いに関してより堅牢であるように開発されました:イノベーションアリーナは20の異なる問題解決タスクを提示します。すべてのタスクが同時に表示されます。被験者は装置に繰り返し直面し、時間の経過とともに革新の出現を測定することができます - 動物が革新的な行動を通して変化する環境条件にどのように適応できるかを調査するための重要な次のステップ。
各個体は、解決策の発見が止まるまで装置で試験された。テストが終了した後、ビデオ録画を分析し、報酬の正常な取得と複数の機器主導の行動をコード化しました。後者は主成分分析を使用して分析され、得られた成分はセッション番号および目的のグループ比較とともに一般化線型混合モデルに含まれ、成功の確率が予測された。
我々は、このアプローチを最初の研究で使用して、長期的な飼育が、その革新的な行動で知られるオウム種、すなわちゴフィンのオウムの問題解決能力に影響を与えるかどうかという問題を標的にした。モチベーションの程度には効果が認められたが、短期囚われの身のグループと長期の問題解決能力に差はなかった。
概要
大きなおっぱい(Parus major)は牛乳瓶に直面しますが、瓶がアルミホイルで閉じられているため、牛乳に直接アクセスすることはできません。それはクリームを飲むことができるようにホイルをつつくことによってこの問題の解決策を見つけます。この状況は、動物イノベーションの最も広く知られている例の1つを説明しています1。
このような問題を解決することは、特に頻繁に変更される可能性のある環境では有利です。Kummer と Goodall2 は、イノベーションを「新しい問題に対する解決策、または古い問題に対する新しい解決策」を見つけることと広く定義しています。Tebbichら3 は、イノベーションのより詳細な定義を、「社会的または物理的環境との新しい行動的相互作用の発見、既存の機会の活用および/または新しい機会の創出」として仮定した。
自発的なイノベーションを目撃するには、徹底的で時間のかかる観察が必要であり、多種多様な種を含む枠組みでは実現不可能なことがよくあります。この課題に対処するために、研究者はイノベーション率4,5を推定するために厳格な文献レビューを実施し、イノベーション傾向と神経学的尺度6,7,8および摂食生態学9,10,11などの他の要因との相関関係を明らかにしました。.しかし、実験的なテストは、制御された環境で革新的な動作を引き出すことができます。このため、技術的な問題解決タスクにおけるパフォーマンスは、動物の革新的な能力の代理としてよく使用されます(12のレビューを参照)。
革新的な問題解決を調査するために、さまざまな異なるアプローチが使用されてきました:例えば、動物の異なるグループは、特定のタスクにおける彼らのパフォーマンスによって比較することができます。このような研究は、典型的には、特定の革新または認知能力(例えば、フック曲げ行動;13、14、15参照)を標的としている。これにより、研究者は特定のコンテキスト内で詳細な情報を得ることができますが、類似点や相違点の解釈はタスクの性質によって制限され、異なるグループとは異なる革新的な強みが必要になる可能性があります(13,14で議論されているように)。
他の研究は、一連の連続したタスク16,17を実装している。複数のタスクのパフォーマンスを比較し、特定のドメイン内の全体的な能力の推定は、この方法によって可能になります。しかし、そのような研究の限界は、異なるタスクの連続したプレゼンテーションにあり、時間の経過とともにイノベーションの出現の調査は許されません。
さらに別のアプローチは、単一の報酬にアクセスするための異なるオプションを同時に提供することです。これは、マルチアクセスボックス(MAB)18,19,20,21,22,23,24,25,26を使用して頻繁に達成され、1つの報酬がパズルボックスの中央に配置され、4つの異なるソリューションを介して取得可能である。同じ解決策が一貫して使用されると、それはブロックされ、動物は報酬にアクセスするために別の解決策に切り替える必要があります。このような実験を通じて、種間および種内の選好を検出して説明することができるが、それでもなお、革新的な行動の発現を試行ごとに1つの解決策に制限する18、19、20、21。他の研究では、動物には複数の溶液を同時に含む装置も提示されており、それぞれに別々の報酬があります。これにより、1回の試行で複数のイノベーションが可能になりますが、これまでのところ、タスクは主にいくつかのモーター的に異なるソリューションに限定されていました。それがこれらの研究の焦点ではなかったことを考えると、実験セットアップは装置への反復暴露を伴わず、時間単位27、28、29あたりの革新率の尺度を可能にするであろう。
ここでは、他のアプローチに加えて、革新的な問題解決能力において異なる種を比較することを目的として私たちを助けるかもしれない方法を提示します。私たちは、グループや種ごとに難易度が異なることが予想される1つのセットアップで、より広い範囲のタスクを開発しました。したがって、タスク固有の格差が解を見つける全体的な確率に影響を与える可能性は低くなります。さらに、すべてのタスクを同時に繰り返し提示して、時間の経過に伴うイノベーションの出現を測定します。この尺度は、革新的な行動の適応価値に関する私たちの理解を深める可能性を秘めています。
この方法を用いた最初の研究では、技術的革新性のための鳥類モデル種であるゴフィンのオウム(Cacatua goffiniana;以下:Goffins)の問題解決能力(いわゆる捕われの身効果によって示唆されるように、30参照)が長期的な捕われの身が問題解決能力(いわゆる捕われの身効果によって示唆されるように;30参照)に影響を与えるかどうかを調査した。
プロトコル
この研究は、優れた科学的実践ガイドラインと国内法に従って、ウィーン獣医学部の倫理および動物福祉委員会によって承認されました。この実験は純粋に食欲をそそり、厳密に非侵襲的であったため、オーストリア動物実験法(TVG 2012)に従って非動物実験として分類されました。インドネシアで実施された実験の一部は、M.O.(410/SIP/FRP/E5/Dit.KI/XII/2016)とB.(411/SIP/FRP/E5/Dit.KI/XII/2016)に本研究の実施許可を与えた外国人研究者許可調整チーム(10/TKPIPA/E5/Dit.KI/X/2016)の会合に基づき、研究技術高等教育省(RISTEK)によって承認さ.Mた。
1. 前提条件/前提条件
- 基本
- 被験者を個別に識別できることを確認します。研究種は、別個の個々のパターンを有してもよく、または個体をマークすることができる(例えば、カラーリングまたは非毒性塗料で)。
メモ: リンギング、および野生のゴフィンの捕捉と解放の詳細については、「補足情報 32」の「キャプチャ解放手順」を参照してください。 - 被験者間の社会的学習を避けるために、視覚的に遮られた部屋がテストに利用できることを確認してください。
- 複数の異なる利用可能な御馳走を試験することによって、研究種および群にとって非常に好ましい報酬を特定する(参考文献32 の補足情報の33または食物嗜好試験を参照)。
- 給餌時間がグループ間で大きく異なるかどうかを検討してください。その場合は、給餌時間がいずれかのグループのタスクを解決するために使用できる時間を大幅に短縮しないようにするプロトコルを検討してください (詳細については、ステップ 4.8 を参照してください)。
注:この研究では、長期飼育下群ではカシューナッツが、短期飼育下群では乾燥トウモロコシが好まれていました。
- 被験者を個別に識別できることを確認します。研究種は、別個の個々のパターンを有してもよく、または個体をマークすることができる(例えば、カラーリングまたは非毒性塗料で)。
- イノベーションアリーナの設計
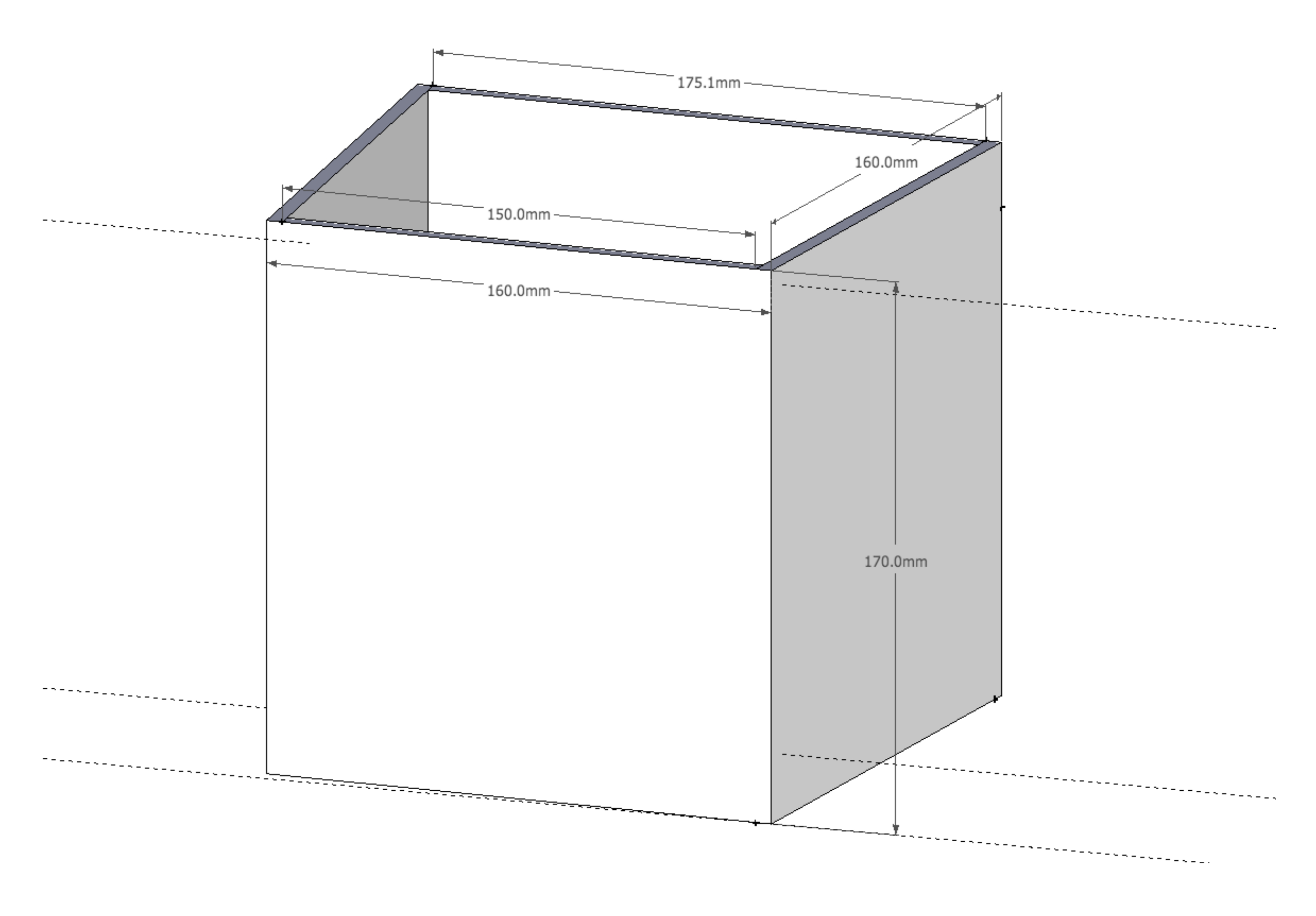
注:完全な装置、すなわちイノベーションアリーナは、木製のプラットフォーム上に半円形に配置された20種類のパズルボックスで構成されています。- 箱の基本的な輪郭を、研究種に適したサイズで設計します。台形 (半円で簡単に位置合わせするため)、取り外し可能なふた (セッション間の餌付けを可能にするため)、および取り外し可能なベースを持つ透明なボックスを使用します ( 図 1 参照)。
注:各ベースは後で恒久的な位置にとどまり、残りのボックスは位置を変更します。提示された研究では、各パズルがオウムによって簡単にアクセスできることを保証するために、ボックスのサイズが選択されました。寸法は、研究種ごとに調整できます。 - 20個のパズルボックスを保持するプラットフォームを設計します。
- テスト中にボックスの蓋を所定の位置に保ち、テストセッション中に被験者が取り外すことができない固定システムを設計します。
注:箱の蓋を餌付けのために取り外す必要があるため、装置から取り外し可能でなければなりません。 - 各ボックスの前面には、20 個の異なるタスクを設計すれば、それぞれが異なる技術的な課題となります ( 図 2 参照)。
注:この実験のタスクは、溶液が多くの異なる種の形態学的範囲内に入ることを目的として設計されました。比較の強さのためには、できるだけこれらに似たタスクを使用するのが理想的ですが、タスクが被験者にとって新しいものであることがさらに重要であることに留意してください。正確な測定値については 材料表 を、タスクのより詳細な図については 補足技術図面 を参照してください。 - 装置に必要なすべての材料を取得します。
- 広角カメラ、コーディングソフトウェア(推奨、例えば、行動観察研究インタラクティブソフトウェア、BORIS34)、および統計分析のためのソフトウェア(例えば、R35)を持っていることを確認してください。
注:フィールドスタディの場合、理想的には、研究現場に出発する前にアリーナを設計し、事前にカットされたアクリルガラスなどの重要な機器をできるだけ多く持参してください。
- 箱の基本的な輪郭を、研究種に適したサイズで設計します。台形 (半円で簡単に位置合わせするため)、取り外し可能なふた (セッション間の餌付けを可能にするため)、および取り外し可能なベースを持つ透明なボックスを使用します ( 図 1 参照)。

図 1: 基本的な 3 面ボックスの図。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}

図2:イノベーションアリーナのタスク と、解決に必要な運動アクションの対応する説明( = 報酬、赤い矢印はタスクを解決するために必要なアクションの方向、黄色の矢印は報酬の軌跡を示す)。タスクは、平均難易度(左から右、上から下)に従って配置されます。32で以前に公開されました。 この図の拡大版を表示するには、ここをクリックしてください。
= 報酬、赤い矢印はタスクを解決するために必要なアクションの方向、黄色の矢印は報酬の軌跡を示す)。タスクは、平均難易度(左から右、上から下)に従って配置されます。32で以前に公開されました。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
2. 準備
- ボックスの左側、背面、右側の3つの側面を接着しますが、前面、上部、ベースは接着しません。
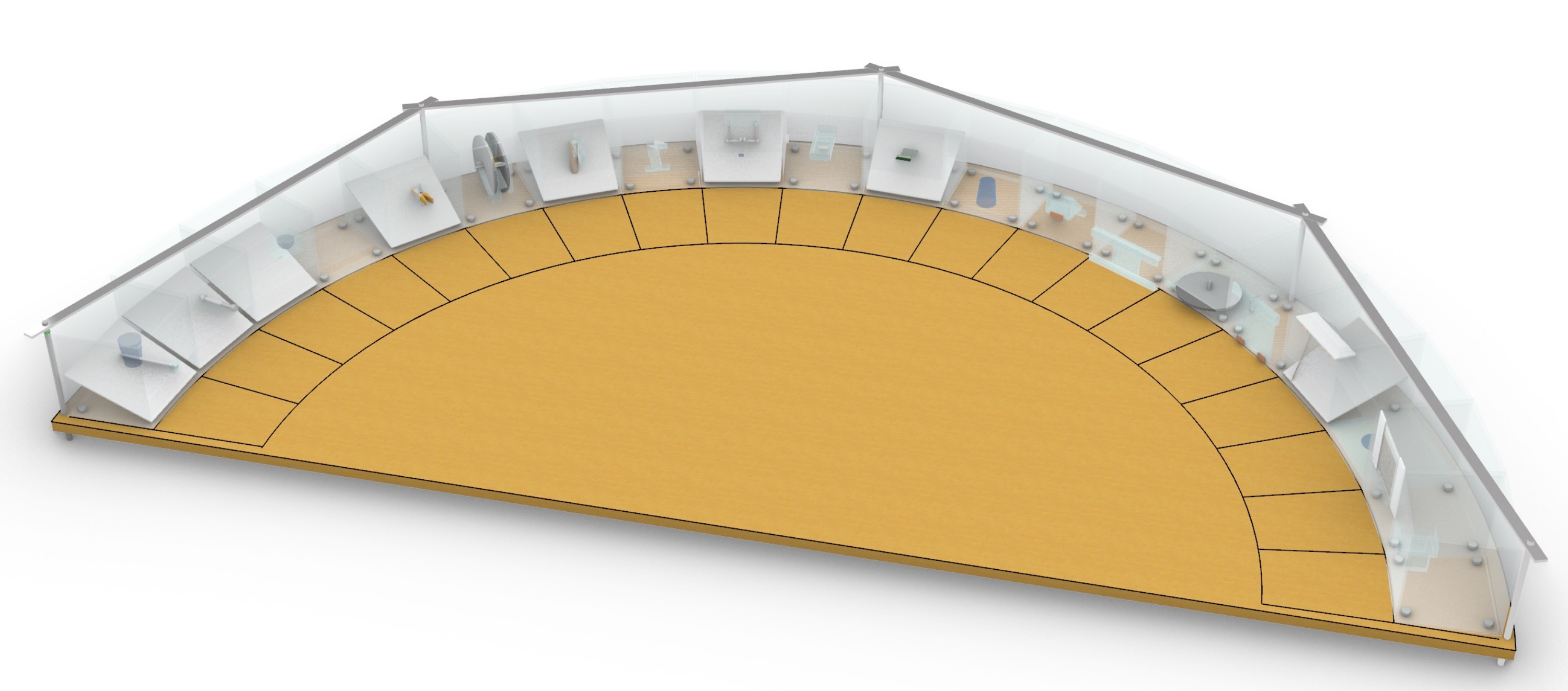
- 各3つの側面のボックスを各ベースの上に置き、プラットフォーム上の半円に均等に整列させます(図3)。各ボックスの前面セクションは、中央から1 mの位置に配置する必要があります。
注:タスクを構成するメカニズム(ボックスの前面と可能な内容)は、実験中の後の時点で追加されます。 - 各ボックスからアリーナの中心に向かって 20 cm の線を引き、線を接続すると、近接グリッドが作成されます (図 3)。
注: 研究種のサイズによっては、異なる距離の方が適している場合があります。ここで提示された研究のために、20cmはゴフィン(尾羽を除く)の長さであるので選択された。 - ボックスのベース以外のすべてを取り外し、プラットフォームに恒久的に取り付けます。これにより、実験中にボックスが所定の位置にとどまることが保証されます。
- アリーナの上の天井に広角カメラを取り付けます。
- セッションと科目ごとの各ボックスの位置のスケジュールを準備します。各主題は常にすべてのボックスに直面しますが、セッションごとに新しい配置が行われます。各タスクの位置 (位置 1 から 20) は、被験者ごとに 2 回同じ位置にボックスがないという制限付きでランダムに割り当てる必要があります。
注: これは理想的な状況です。被験者のテスト順序を計画できない場合(フィールドスタディではより可能性が高い)、セッション間の(ただし被験者内ではそうではない)このランダム化制限(同じ位置にボックスが2回ない)で十分です。

図3:イノベーションアリーナ 半円状に配置されたタスク。20のタスクの位置は交換可能です。近接グリッド (各ボックスの前に 20 cm) は黒でマークされています。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
3. 慣れ
注:馴化の目的は、アリーナに対するネオフォビア反応の影響を減らすことです。各個人が2つの基準に達することを要求する慣れ親しんだ手順を通して、すべての被験者の最低限の慣れレベルを確保します。
- 非機能的領域への馴化(基準Iまで)
- すべての3つの側面のボックスをベースに置き、各ボックスの蓋を追加し、固定システム(被験者がいなくても)で所定の位置に保持します。
注:例えば、プラットフォームに徐々にボックスを追加したり、アリーナをホームエリアに提示したり、周り、上、ボックスなどのプラットフォームの任意の位置に報酬を配置したり、最初に大きなグループの装置と対峙したりして、種ごとに適切な段階で被験者に慣れることを検討してくださいグループサイズを徐々に最小化します。 - 被験者に、新生恐怖反応を引き起こす可能性のあるタスクの別々の要素に慣れ親しませます。
注:これらの別々の要素(すなわち、基本的なボックス、プラットフォーム、および固定システムを除くすべて)は、この段階で機能的なメカニズムに結合してはなりません。 - 箱(中央)の中に1つの報酬を置きます。被写体をコンパートメントに持ち込む。
- 干渉せずにセッションの長さを待ちます。被験者は今、報酬を食べることになっています。
注:これらの慣れセッションの期間は実験で異なり、長期の捕獲された鳥は10分を受け取りましたが、短期の捕獲されたオウムは報酬を食べるのに20分かかりました。これは、報酬の種類が異なるため、給餌時間がかなり長くなったことを説明するために必要でした。この問題は、テストセッションの後半で異なる方法で対処されました(ステップ4.8を参照)。 - 基準に達するまで被験者ごとに(テスト日に1セッションずつ)繰り返します:各個人は、グループから視覚的に分離されている間に、3つの連続したセッション内で3つの側面ボックス(ボックスごとに1つの報酬)からすべての報酬を消費します。
- すべての3つの側面のボックスをベースに置き、各ボックスの蓋を追加し、固定システム(被験者がいなくても)で所定の位置に保持します。
- 機能領域への馴化(基準IIまで)
- それらを機能的なパズルボックスにするために、ボックスに必要なすべての要素を接着し、恒久的に取り付けます。
メモ: この時点で、アリーナはテストセッションと同様に完全に機能しています。 - 箱をプラットフォーム上にランダムに置き(ベースによって所定の位置に保持されます)、蓋を箱に固定します。
- アリーナの中心に最も近い端にある各ボックスのふたに1つの報酬を置きます。
- 被写体をコンパートメントに持ち込む。
- 干渉せずにセッションの長さを待ちます。
注:被験者は報酬を食べることになっています。 - 基準に達するまで、被験者ごとに繰り返します(テスト1日あたり1セッション)。
注:基準II:個人は、グループから視覚的に分離されている間、1つのセッション内で機能パズルボックスの上部からすべての報酬(ボックスごとに1つの報酬)を消費します。この基準IIは、被験者が新しい部品が取り付けられた場合でも、アリーナを恐れないことを保証します。ただし、メカニズムと対話すべきではなく、対話する場合は中断する必要があります。
- それらを機能的なパズルボックスにするために、ボックスに必要なすべての要素を接着し、恒久的に取り付けます。
4. テスト
- ランダム化スケジュールに従ってボックスをプラットフォームに配置します。
- 各タスクをボックス内の適切な場所にベイトします ( 図 2 参照)。
注: 各報酬の正確な位置は、特定のタスクによって異なり、ビデオで確認できます。 - 蓋を箱に取り付け、固定システムで固定します(被験者がそれらを引き離すことができないようにするため)。
- 1つの個々の被験者を分離し、テストコンパートメントに持ち込む。被験者は、社会的学習の干渉を避けるために一度に1つずつテストされます。
- それらを開始位置(すなわち、プラットフォームの中心にあるすべてのタスクに等しい距離にある点)に配置するか、開始位置にインセンティブ(例えば、報酬)を配置して、被験者がそこから始まるようにする。
- タイマーを起動し、被験者に干渉したり対話したりすることなく、20分(セッション時間)待ちます。被験者はできるだけ多くのタスクを解決できます。
- 被験者が装置以外の物体に気を取られた場合、実験者はそれらをアリーナの開始位置に戻すことが許される(可能な場合)。
- 被験者が報酬に3秒以上給餌する場合は、タイマーを停止し、給餌が終了するまで待ってからタイミングを再開します。
注: これは、タスクの解決に使用できる最大時間が供給時間によって短縮されず、したがって両方のグループで等しくなるようにするために行われます。 - 被験者が最初の3分以内にどのタスクとも対話せず、また動揺していない場合は、モチベーションプロトコルを適用します(セクション5を参照)。
- 20分が経過し(最大1セッション)、または参加者がすべてのタスクを解決したら、被験者はその日のテストを完了し、ホームエリアに戻すことができます。
- 次のテスト日に、この手順を繰り返します。
- 最後の 5 つのセッションで新しいタスクが解決されなくなるか、10 回の連続したセッションでまったくタスクが解決されなくなるまで、各個人のテストを続けます。
5. モチベーションプロトコル
注:上記のように(ステップ4.9)、個人がセッションの最初の3分以内にどのタスクとも対話しない場合、動機付けプロトコルを実装できます。
- ボックスの上に3つの報酬を置きます(このために、左側、中央側、右側のボックスを選択します)。被験者が報酬を消費してから3分後にタスクとの対話を開始した場合は、セッションを再開します(20分の継続時間はこの時点で開始されます)。
- そうでない場合は、アプローチライン(近接グリッド)に分散した5つの報酬を配置します。被験者が報酬を消費してから3分後にタスクとの対話を開始した場合は、セッションを再開します(20分の継続時間はこの時点で開始されます)。
- そうでない場合は、開始位置に5つの報酬を配置します。被験者が報酬を消費してから3分後にタスクとの対話を開始した場合は、セッションを再開します(20分の時間枠はこの時点で開始されます)。
- そうでない場合は、開始位置にいくつかの報酬を配置し、この日のテストセッションを終了します(ただし、被験者に報酬を消費する時間を与えます)。
6. 分析
- ビヘイビアコーディング
- ビデオを分析する前に、コーディングプロトコルを詳細に調べ(表1)、テストする種に調整が必要かどうかを検討します。
注: コーディング変数の説明は、さまざまな研究者間のコーディングの違いを避けるために、できるだけ具体的にする必要があります。 - ポイント イベントに注釈を付ける: タッチされたさまざまなタスクの数 (TasksTouched;タッチされたタスクの最大数は 20)、解決されたタスクの数 (TasksSolved)、ベイトされたタスクとの接触 (BaitedContact)、および解決されたタスクとの接触 (解決済みの連絡先) であることに注意してください。
- サブジェクトがグリッド線の外側のボーダーを横切るまでの待機時間 (LatencyGrid) とグリッド内で費やされた時間 (GridTime) に注釈を付けます。
- ビデオを分析する前に、コーディングプロトコルを詳細に調べ(表1)、テストする種に調整が必要かどうかを検討します。
- 統計解析
- 装置指向の動作 (LatencyGrid、GridTime、TasksTouched、BaitedContact、SolvedContact) のメジャーが相関しているかどうかを判断します。
- 「はい」の場合、主成分分析を使用して主成分を抽出してから、予測変数としてモデルに含めます。
- 相関していない場合は、予測変数としてモデルに個別に含めます。
- 二項誤差構造とロジットリンク関数36で一般化線型混合モデルを実行する。成功の確率を予測するには(つまり、応答変数がSolvedTasksである)、モデルを最大ランダムスロープ構造で適合させ、サブジェクト、タスク、サブジェクトとセッションの複合係数(SessionID)、およびサブジェクトとタスクの複合係数(Subj.Task)のランダム切片を含めて、擬似レプリケーションを回避します。対象(種など)と主成分の比較を予測変数およびセッションの制御として使用します。可能な相互作用を検討します。
- 不可解な多重検定37 を回避するために、個々の予測変数を検定する前に、まず、関心のあるすべての固定効果を欠いているモデルとモデルを比較する。
- グループ間のタスクの難易度の全体的な差をテストするには、(完全な)モデルと、タスク内のグループのランダムな傾きを持たないモデルを比較します。
結果
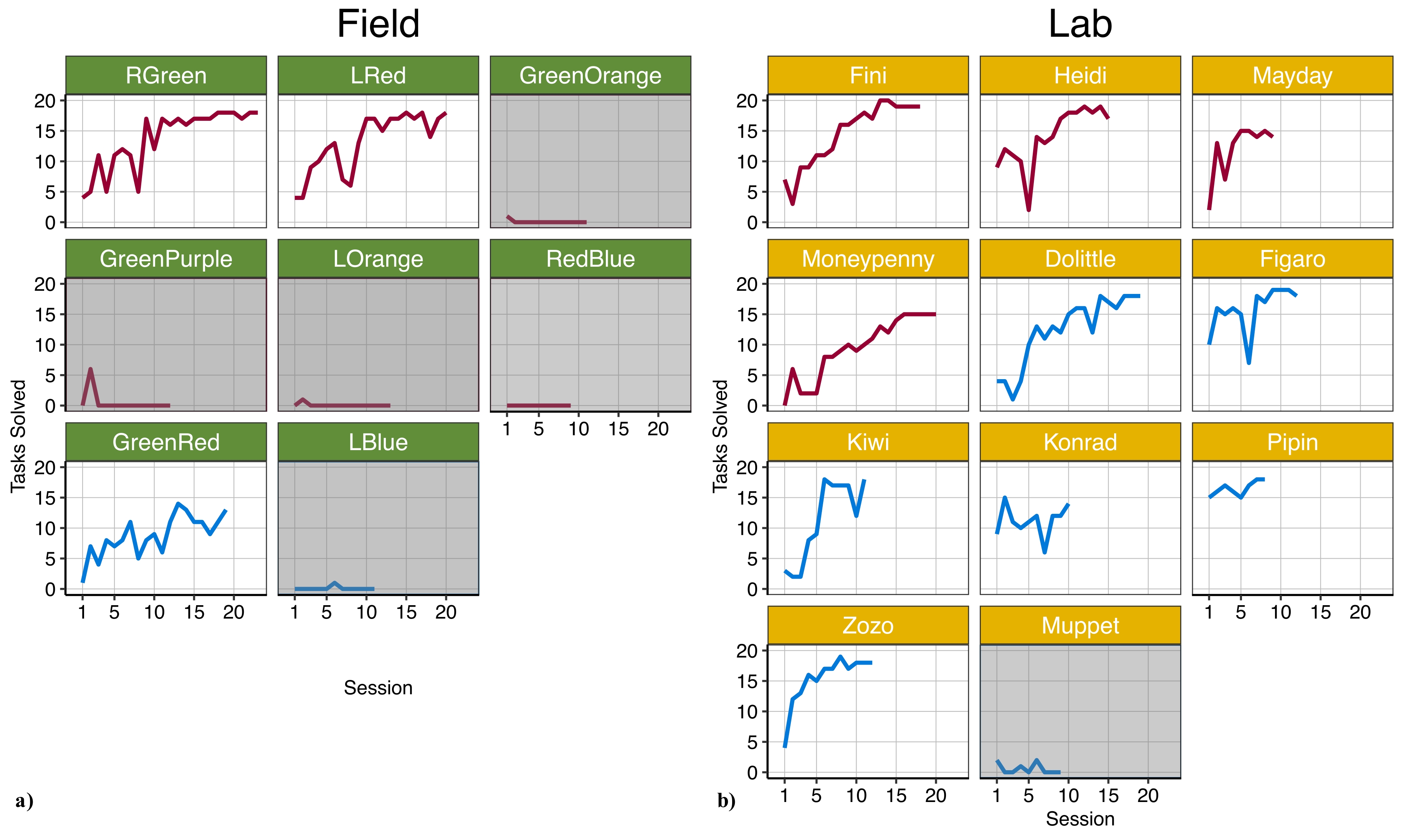
イノベーションアリーナを使用して19人の被験者がテストされました:11の長期および8つの短期捕獲オウム(図4)。

図 4: 各個人のセッションごとに解決されたタスクの数の概要 。a) フィールド グループ、b) ラボ グループ。赤い線 = 女性;青い線 = 男性。装置と対話することを躊躇するために動機付けプロトコルを受けた被験者は、動機付けされていないと分類され、灰色の背景で描かれた。以前、32の補足情報に掲載されました。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
主成分分析の結果、カイザーの基準38を超える固有値を持つ2つの成分が得られました(PCA出力については表2を参照)。PC1は、タスクとの接触の頻度、タスクの近接(すなわち、グリッド内)で費やされた時間、およびタッチされたタスクの数にロードされた。PC2は、すでに解決されたタスクとの接触の数によってプラスの影響を受け、解決されていないタッチされたタスクの数にマイナスの影響を受けました。このようなタスク指向の行動は、モチベーションを測定するためによく使用されます(レビューについては12を参照)。そこで、PC1とPC2を、我々のモデルで装置と対話する動機付けの定量的尺度として用いた。一緒に彼らは装置指向行動の分散の76.7%を説明し、セッションと同様に両方がタスクを解決する確率に有意に影響を与えた(PC1:推定値= 2.713、SE±0.588、χ2= 28.64 、p < 0.001;PC2: 推定値 = 0.906, SE ± 0.315, χ2 = 9.106, p = 0.003;セッション: 推定値 = 1.719, SE ± 0.526, χ2 = 6.303, p = 0.001;図 5 を参照してください。表4参照)。

図5:(a)PC1、(b)PC2、(c)セッションの解く確率に対する制御予測変数の影響。点は観測データを示し、点の面積は各データ点の観測値を示し、破線はモデルの適合値を示し、面積はモデルの信頼区間を象徴します。32で以前に公開されました。この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
19人の被験者のうち6人が実験中に動機付けプロトコルを受けた(ラボ:11人中1人;フィールド: 5 のうち 8)。私たちが動機付けていないと分類したこれらの鳥のPC1は、-2.934から-2.2の範囲であったが、他のすべての動機付けされた個体について正の値が見出された(表3)。
提示された方法では、イノベーションアリーナの20の技術的問題解決タスクを解決する確率に関するグループの差は見つからなかった(推定値= −0.089、SE± 1.012、χ2= 0.005、p = 0.945;図 5;固定効果の推定値については、表4を参照してください。すべての鳥が含まれています)。
セッションを持つ群の交互作用項を含むモデル(推定値= 2.924、 SE ± 0.854、 χ2 = 14.461、 p < 0.001)を含むモデルとの事後比較は、以前のセッションではフィールド群で解く確率が低いが、後のセッションでは解く確率が低いことを示唆している。以前のセッションでのこの違いは、グループフィールド(10〜13セッションの間に受け取った10の連続したセッションでタスクを解決しないというルールのためにテストが停止した個人)のモチベーションの低い/ない鳥の数が多いためかもしれません。
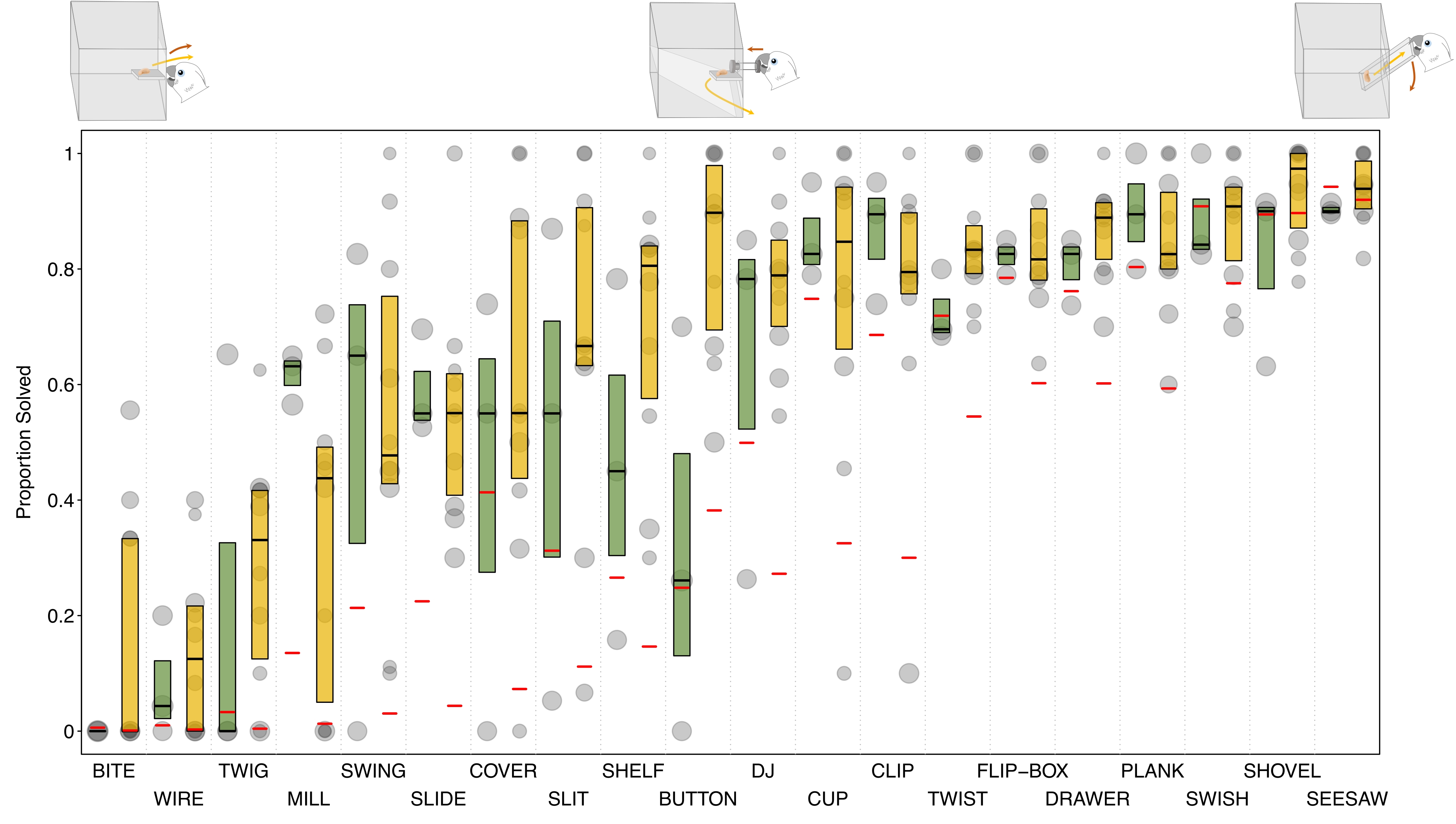
さらに、タスクの全体的な難易度に関してグループ間に差は見られなかった(タスク内のグループのランダムな傾きを欠いている縮小モデルと、すべての鳥を含むフルモデルの比較:χ2 = 7.589、 df = 5、 p = 0.18)。しかし、動機付けの試行を必要としない鳥の視覚的な比較は、単一の個々のタスクに対する能力のいくつかの違いを示唆しています(例えば、 図6のButtonタスクを参照)。

図6:やる気のある被験者の観察データと、タスクおよびグループごとのモデルの適合値:箱ひげ図は、両方のグループのタスクごとの成功の割合を示しています(緑 = フィールド、オレンジ = ラボ)。太字の水平線は中央値を示し、ボックスは鳥の第1四分位数から第3四分位数にまたがります。箱ひげ図は、やる気のある鳥からのデータのみを示しています(視覚的な明瞭さを向上させるため)。個々の観測値は点ごとに表示されます(面積が大きいほど、データ点あたりの観測値が多いことを示します)。赤い水平線は適合値を示します。適合値はデータセット全体から取得されます。バイト(左下)、ボタン(中央上)、シーソー(右上)のタスクのイラストが含まれています。32で以前に公開されました。この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
これらの結果は、動物が異なる経験や生態学的状況を有していても、比較研究のための方法論の実現可能性を実証する。ボタンタスクのような単一のタスクのみを使用した革新的な問題解決能力を比較すると、長期飼育下の鳥がより良い問題解決者であるという誤った結論が得られた可能性があります。この違いは、スティック挿入実験における実験室集団の経験によって説明できるが、運動作用は野生個体群にとって生態学的に関連性がないかもしれない。このような違いは、異なる種を比較すると、より顕著になる可能性があります(19参照)。さらに、モチベーションが問題解決能力にどのように影響するかを検証すると同時に、モチベーションをコントロールしながら2つのグループの結果を比較することができました。
したがって、イノベーションアリーナの20の技術的問題は、特定のタスクに関するグループの違いを検出するだけでなく、グループの全体的な革新的能力を推定するためにも使用できます。ゴフィンのオウムの場合、両方のグループは、すなわち、彼らが望むならば、すなわち、装置と相互作用するように動機づけられるならば、多くの報酬を取り出す能力を有することができる。
表 1: コーディング動作のプロトコル: コード化された動作変数の詳細な説明。32で以前に公開されました。 この表をダウンロードするには、ここをクリックしてください。
表 2: 主成分の出力: 因子負荷量が0.40を超える場合は太字で印刷されます。32で以前に公開されました。 この表をダウンロードするには、ここをクリックしてください。
表 3: タスク指向の行動と主成分の主題と値の詳細: メジャー負荷が PC あたり 0.40 を超える場合の上付き文字。32で以前に公開されました。 この表をダウンロードするには、ここをクリックしてください。
表4:解く確率のモデルの固定効果結果。 32で以前に公開されました。 この表をダウンロードするには、ここをクリックしてください。
補足ファイル:イノベーションアリーナ(イノベーションアリーナ.3dm)の技術図面。 寸法が若干ずれることがあります。例えば、3dviewer.net にロードすることができ、これは、フリーでオープンソースの3Dモデルビューア39である。 このファイルをダウンロードするには、ここをクリックしてください。
ディスカッション
イノベーションアリーナは、革新的で技術的な問題解決をテストするための新しいプロトコルです。イノベーションアリーナのタスクを設計する際には、種の形態学的制約の範囲(例えば、くちばし、鼻、足、爪、または手の使用)を考えると、タスクは解決可能であるべきであると慎重に考えました。既に試験されている種と将来試験される種との間のより広範な比較可能性を可能にするため、我々は、それぞれのモデルで実現可能であれば、これらのタスクの使用を奨励する。しかし、いくつかのタスクは、種の特定の形態学的限界に合わせて調整する必要があるかもしれないことを認識しています。最も重要なのは、タスクは被験者にとって斬新である必要があり、新しい代替設計が必要になる可能性があることです。イノベーションアリーナの利点の1つは、さまざまなタスクの数が多いため、将来の研究でいくつかのタスクを調整または変更する必要がある場合でも、比較が引き続き可能で有益であることです。
研究を計画する際には、事前試験段階(例えば、装置の設計および構築)にかなりの時間を必要とする可能性があることを考慮すべきである。また、被験者を装置に充分に馴化させることが重要である。異なる基は、それらの探索的アプローチおよびネオティック反応において実質的に異なる可能性がある40、41、42。ネオフォビア反応の排除(または減少)は、比較をより信頼できるものにし、動機付けの役割を特定することを可能にする。時間の経過とともにイノベーションの個々の出現を測定し、社会的学習を避けるためには、被験者が繰り返し個別にテストされることが重要であり、現場では困難な場合があります。多くの種にとって、野生の捕獲された被験者は、新しい環境、人間の存在、相互作用に慣れ、作業分離手順を開発するために長い時間を必要とするでしょう。さらに、セッションごとの各個人のランダム化スケジュールを厳密に遵守することは現実的に不可能かもしれません。私たちの研究の長期捕獲されたオウムは、個人名で呼ばれたときにテストコンパートメントに入るように訓練されていましたが、どの個人がフィールドでテストルームに入るかについては、より日和見的である必要がありました。モチベーションのレベルとは別に、イノベーションアリーナを使用した比較研究の結果に影響を与える可能性のある別の要因に遭遇しました。餌の好みと食物の入手可能性のために、私たちは2つのグループに異なる報酬タイプを使用し、実験鳥と比較して野生のオウムの餌やり時間を長くしました。これらの違いを説明するには、個人がアリーナに直面した合計時間に摂食時間(3秒を超えた場合)を追加しました。このプロトコルは、アリーナと対話する時間が摂食時間のために1つのグループで短縮されないことを確実にしました。今後の研究では、この潜在的な問題を考慮する必要があり、すでに慣れの段階にあるこのプロトコルを実装することを目指すかもしれません。
この方法の強さおよび新規性は、より多様なタスクの組み合わせ、これらのタスクの同時提示、装置との遭遇ごとの複数の報酬、および各被験者の装置への反復暴露を含む。
さらに、個人は新しいタスクを解決しなくなるまでテストされます。固定数のセッションとは対照的に、このソリューション発見の最大(または漸近的レベル)は、セッションごとに解決されたタスクの数とともに、変化する環境へのグループの潜在的な適応について有益であり得る。
代替方法の一例は、マルチアクセスボックス(MAB)であり、そこでは、4つの異なる解決策を通してタスクを解決することが可能であるが、装置18 との遭遇ごとに1つの報酬しか取り出すことができず、したがって、経時的な革新率の推定は著しく制限される。さらに、種固有の単一のタスクの困難さは、認知能力に関するパフォーマンスの比較に強く影響する可能性があります。我々の知る限り、運動的に異なる解決策を伴うタスクの同時提示は、以前の研究では最大6つのタスクに制限されていた(Federspiel、mynah birdsの6ウェイMAB、これまでのところ未発表のデータ)。MABは探査技術を明らかにするのに非常に便利なツールですが、イノベーションアリーナはそれ自体を革新する能力の比較に適していると考えています。難易度も異なるより広い範囲のタスクは、全体的な技術的問題解決能力29についてより有益であり得る。
私たちの最初の研究では、同じ種の2つのグループ、ゴフィンのオウムを比較することに成功しましたが、これは彼らの経験が大きく異なっていました。この比較では、長期の捕われが問題解決能力に影響を与えるかどうかという問題を特にターゲットにしました。以前の研究では、長期の飼育下生活様式がこれらの能力を高めることが示唆されているが(30,43参照)、制御された実験的アプローチによる直接比較はまれであった(しかし、44,45参照)。イノベーションアリーナを使用することで、私たちはこの質問をターゲットにすることができ、ゴフィンズが新しい解決策を見つけるための全体的な能力に対する捕われの身の影響を支持することはなく、むしろ動機付けのレベル32への影響を見つけました。
さらに、イノベーションアリーナは、革新的な問題解決のさまざまな側面に焦点を当てた質問に対処するために使用できます。さらなるステップには、発散と収束の影響を対象とする調査が含まれる可能性があります。例えば、生態学が異なる近縁種(例えば、島嶼種対非島嶼種)だけでなく、オウムやコルビッドの代表種、または鳥類や霊長類種など、これまで個々の物理的問題解決において同様の性能を示した遠縁種との比較46。イノベーションアリーナは、遠く離れた種であっても、多くの異なる種を比較するために開発されました。
そうは言っても、この方法は個人間差を調査するためにも非常にうまく使用できます。たとえば、パーソナリティスコアを予測変数として使用して、イノベーション率への影響を推定することができます。提示された方法は、動物と人間のイノベーションを研究する研究グループ、および/または異なる種の研究を専門とする研究室によって共同で使用できると考えています。
開示事項
著者らは利益相反がないと宣言しています。
謝辞
このビデオの制作に協力してくれたStefan SchierhuberとDavid Lang、技術的な図面の協力をしてくれたChristoph Rössler、そしてこの原稿の校正に協力してくれたPoppy Lambertに感謝します。この出版物はオーストリア科学基金(FWF;STARTプロジェクトY01309がA.A.に授与されました)。発表された研究は、オーストリア科学基金(FWF、A.A.に授与されたプロジェクトP29075およびP29083およびM.O.に授与されたプロジェクトJ 4169-B29)およびウィーン科学技術基金(WWTF、A.A.に授与されたプロジェクトCS18-023)によって資金提供されました。
資料
| Name | Company | Catalog Number | Comments |
| wooden platform | Dimensions: wooden semicircle, radius approx. 1.5m | ||
| FIXATION SYSTEM | |||
| 5 x metal nut | Dimensions: M8 | ||
| 5 x rod | (possibly with U-profile) | ||
| 5 x threaded rod | Dimensions: M8; length: 25cm | ||
| 5 x wing nut | Dimensions: M8 | ||
| PUZZLE BOXES WITHOUT FUNCTION PARTS | |||
| 20 x acrylic glass back | Dimensions: 17cm x 17.5cm x 0.5cm | ||
| 20 x acrylic glass base | 4 holes for screws roughly 2cm from each side Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| 20 x acrylic glass front | acrylic glass fronts need to be cut differently for each puzzle box (see drawing) Dimensions: 17cm x 15cm x 0.5cm | ||
| 20 x acrylic glass lid | cut out 0.5cm at the edges for better fit Dimensions: trapezoid shape: 18.5cm x 16cm x 16cm x 1cm (thick) | ||
| 40 x acrylic glass side | Dimensions: 17cm x 16cm x 0.5cm | ||
| 80 x small screw | to attach bases to the platform (4 screws per base) | ||
| PARTS FOR EACH MECHANSIM PER TASK | |||
| to assemble the parts use technical drawing InnovationArena.3dm | can be loaded e.g. in 3dviewer.net, which is a free and open source 3D model viewer. github repository: https://github.com/kovacsv/Online3DViewer; please contact authors if you are in need of a different format | ||
| TASK TWIST | |||
| 5x small nut | to attach glass (punch holes) and acrylic glass cube to threaded rod | ||
| acrylic glass | Dimensions: 2cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5cm; base diameter: 3cm | ||
| thin threaded rod | Dimensions: length: approx. 10cm | ||
| TASK BUTTON | |||
| 2x nut | attach to rod; glue outer nut to rod Dimensions: M8 | ||
| acrylic glass | V-cut to facilitate sliding of rod Dimensions: 4cm x 3cm x 1cm (0.5cm V-cut in the middle) | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| threaded rod | Dimensions: M8, length: 5cm | ||
| TASK SHELF | |||
| acrylic glass top | Dimensions: 5cm x 4cm x 0.3cm | ||
| acrylic glass lower | Dimensions: 5cm x 4cm x 1cm | ||
| acrylic glass side 1 | Dimensions: 4cm x 3cm x 0.5cm | ||
| acrylic glass side 2 | Dimensions: 4.5cm x 3cm x 0.5cm | ||
| thin plastic bucket | one side cut off to fit Dimensions: diameter: approx. 4.5 cm; height: 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| TASK SLIT | room to reach in: 2cm in height | ||
| - | recommended: add small plastic barrier behind reward so it cannot be pushed further into the box | ||
| TASK CLIP | |||
| 2x acrylic glass | Dimensions: 1cm x 1cm x 2cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| peg | Dimensions: length: approx. 6 cm | ||
| thin threaded rod | Dimensions: length: approx. 6 cm | ||
| TASK MILL | |||
| 2x arylic glass triangle | Dimensions: 10cm x 7.5cm x 7.5cm; thickness: 1cm | ||
| 2x plastic disc | Dimensions: diameter: 12cm | ||
| 4x small nut | for attachment | ||
| 7x acrylic glass | Dimensions: 4.5cm x 2cm, 0.5cm | ||
| acrylic glass long | position the mill with longer acrylic glass touching lower half of the front (this way the mill can only turn in one direction) Dimensions: 6.5cm x 2cm, 0.5cm | ||
| thin threaded rod | Dimensions: length: approx. 4cm | ||
| wooden cylinder | Dimensions: diameter: 2cm | ||
| TASK SWISH | |||
| 2x acrylic glass | Dimensions: 2cm x 1cm x 1cm | ||
| 4x small nut | for attachment | ||
| acrylic glass | Dimensions: 10cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin threaded rod | Dimensions: length: approx. 7cm | ||
| wooden cylinder | Dimensions: diameter: 2cm, cut-off slantwise; longest part: 7cm, shortest part: 5cm | ||
| TASK SHOVEL | |||
| acrylic glass | Dimensions: 20cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 7.5cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 5cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SWING | |||
| 4x nut | Dimensions: M8 | ||
| acrylic glass | Dimensions: 7.5cm x 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| cord strings | Dimensions: 2x approx. 11cm | ||
| thin bent plastic | bucket to hold reward; positioned on slant | ||
| threaded rod | Dimensions: M8; length: 7cm | ||
| TASK SEESAW | |||
| 2x acrylic glass | Dimensions: 10cm x 1.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 1.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 10cm x 3cm x 0.5cm | ||
| acrylic glass | Dimensions: 4cm x 1.5cm x 1cm | ||
| small hinge | |||
| TASK PLANK | |||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin tin | bent approx. 1cm inside box Dimensions: 6.5cm x 3cm | ||
| TASK CUP | |||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5; base diameter: 3cm | ||
| TASK FLIP-BOX | |||
| 2x acrylic glass triangle | Dimensions: 7cm x 5cm x 5cm; thickness: 0.5cm | ||
| 2x acrylic glass | Dimensions: 4.5cm x 5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 7cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SLIDE | |||
| 4x acrylic glass | Dimensions: 15cm x 1cm x 0.5cm | ||
| acrylic glass door | Dimensions: 6cm x 6cm x 0.5cm | ||
| TASK DJ | |||
| 2x small nut | for attachment | ||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| plastic disc | Dimensions: diameter 12cm | ||
| thin threaded rod | Dimensions: length: approx. 3cm | ||
| TASK WIRE | |||
| acrylic glass | Dimensions: 9.5cm x 9.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 12cm x 2cm x 1cm | ||
| 2x small hinge | |||
| wire from a paperclip | |||
| TASK TWIG | |||
| 2x small hinge | |||
| acrylic glass | Dimensions: 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| white cardboard | Dimensions: 13cm x 4cm | ||
| Y-shaped twig | Dimensions: length: approx. 14cm | ||
| TASK COVER | |||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| thin plastic | Dimensions: diameter: 5cm | ||
| TASK BITE | recommended: put tape on sides of platform the keep reward from falling off | ||
| 2-3 paper clips | |||
| 2x cutout from clipboard | Dimensions: 10cm x 3cm | ||
| acrylic glass | hole in middle Dimensions: 5cm x 3cm x 1cm | ||
| toilet paper | |||
| TASK DRAWER | |||
| 2x acrylic glass | Dimensions: 5cm x 2.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 3cm x 1cm | ||
| acrylic glass | hole approx. 2 cm from front Dimensions: 5cm x 5cm x 1cm | ||
| OTHER MATERIAL | |||
| wide-angle videocamera |
参考文献
- Fisher, J. The opening of milkbottles by birds. British Birds. 42, 347-357 (1949).
- Kummer, H., Goodall, J. Conditions of innovative behaviour in primates. Philosophical Transactions of the Royal Society of London. B, Biological Sciences. 308 (1135), 203-214 (1985).
- Tebbich, S., Griffin, A. S., Peschl, M. F., Sterelny, K. From mechanisms to function: an integrated framework of animal innovation. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150195 (2016).
- Reader, S. M., Laland, K. N. Social intelligence, innovation, and enhanced brain size in primates. Proceedings of the National Academy of Sciences. 99 (7), 4436-4441 (2002).
- Reader, S. M., Laland, K. N. Primate innovation: Sex, age and social rank differences. International Journal of Primatology. 22 (5), 787-805 (2001).
- Lefebvre, L., Whittle, P., Lascaris, E., Finkelstein, A. Feeding innovations and forebrain size in birds. Animal Behaviour. 53 (3), 549-560 (1997).
- Lefebvre, L., et al. Feeding innovations and forebrain size in Australasian birds. Behaviour. 135 (8), 1077-1097 (1998).
- Timmermans, S., Lefebvre, L., Boire, D., Basu, P. Relative size of the hyperstriatum ventrale is the best predictor of feeding innovation rate in birds. Brain, Behavior and Evolution. 56 (4), 196-203 (2000).
- Ducatez, S., Clavel, J., Lefebvre, L. Ecological generalism and behavioural innovation in birds: technical intelligence or the simple incorporation of new foods. Journal of Animal Ecology. 84 (1), 79-89 (2015).
- Sol, D., Lefebvre, L., Rodríguez-Teijeiro, J. D. Brain size, innovative propensity and migratory behaviour in temperate Palaearctic birds. Proceedings of the Royal Society B: Biological Sciences. 272 (1571), 1433-1441 (2005).
- Sol, D., Sayol, F., Ducatez, S., Lefebvre, L. The life-history basis of behavioural innovations. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150187 (2016).
- Griffin, A. S., Guez, D. Innovation and problem solving: A review of common mechanisms. Behavioural Processes. 109, 121-134 (2014).
- Laumer, I. B., Bugnyar, T., Reber, S. A., Auersperg, A. M. I. Can hook-bending be let off the hook? Bending/unbending of pliant tools by cockatoos. Proceedings of the Royal Society B. Biological Sciences. 284 (1862), 20171026 (2017).
- Rutz, C., Sugasawa, S., Vander Wal, J. E. M., Klump, B. C., St Clair, J. J. H. Tool bending in New Caledonian crows. Royal Society Open Science. 3 (8), 160439 (2016).
- Weir, A. A. S., Kacelnik, A. A New Caledonian crow (Corvus moneduloides) creatively re-designs tools by bending or unbending aluminium strips. Animal Cognition. 9 (4), 317-334 (2006).
- Herrmann, E., Hare, B., Call, J., Tomasello, M. Differences in the cognitive skills of bonobos and chimpanzees. PloS One. 5 (8), 12438 (2010).
- Herrmann, E., Call, J., Hernández-Lloreda, M. V., Hare, B., Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science. 317 (5843), 1360-1366 (2007).
- Auersperg, A. M. I., Gajdon, G. K., von Bayern, A. M. P. A new approach to comparing problem solving, flexibility and innovation. Communicative & Integrative Biology. 5 (2), 140-145 (2012).
- Auersperg, A. M. I., von Bayern, A. M. P., Gajdon, G. K., Huber, L., Kacelnik, A. Flexibility in problem solving and tool use of Kea and New Caledonian crows in a multi access box paradigm. PLoS One. 6 (6), 20231 (2011).
- Daniels, S. E., Fanelli, R. E., Gilbert, A., Benson-Amram, S. Behavioral flexibility of a generalist carnivore. Animal Cognition. 22 (3), 387-396 (2019).
- Johnson-Ulrich, L., Holekamp, K. E., Hambrick, D. Z. Innovative problem-solving in wild hyenas is reliable across time and contexts. Scientific Reports. 10 (1), 13000 (2020).
- Johnson-Ulrich, L., Johnson-Ulrich, Z., Holekamp, K. Proactive behavior, but not inhibitory control, predicts repeated innovation by spotted hyenas tested with a multi-access box. Animal Cognition. 21 (3), 379-392 (2018).
- Williams, D. M., Wu, C., Blumstein, D. T. Social position indirectly influences the traits yellow-bellied marmots use to solve problems. Animal Cognition. 24 (4), 829-842 (2021).
- Cooke, A. C., Davidson, G. L., van Oers, K., Quinn, J. L. Motivation, accuracy and positive feedback through experience explain innovative problem solving and its repeatability. Animal Behaviour. 174, 249-261 (2021).
- Huebner, F., Fichtel, C. Innovation and behavioral flexibility in wild redfronted lemurs (Eulemur rufifrons). Animal Cognition. 18 (3), 777-787 (2015).
- Godinho, L., Marinho, Y., Bezerra, B. Performance of blue-fronted amazon parrots (Amazona aestiva) when solving the pebbles-and-seeds and multi-access-box paradigms: ex situ and in situ experiments. Animal Cognition. 23 (3), 455-464 (2020).
- Bouchard, J., Goodyer, W., Lefebvre, L. Social learning and innovation are positively correlated in pigeons (Columba livia). Animal Cognition. 10 (2), 259-266 (2007).
- Griffin, A. S., Diquelou, M., Perea, M. Innovative problem solving in birds: a key role of motor diversity. Animal Behaviour. 92, 221-227 (2014).
- Webster, S. J., Lefebvre, L. Problem solving and neophobia in a columbiform-passeriform assemblage in Barbados. Animal Behaviour. 62 (1), 23-32 (2001).
- Haslam, M. 34;Captivity bias" in animal tool use and its implications for the evolution of hominin technology. Philosophical Transactions of the Royal Society B: Biological Sciences. 368 (1630), 20120421 (2013).
- Lambert, M. L., Jacobs, I., Osvath, M., von Bayern, A. M. P. Birds of a feather? Parrot and corvid cognition compared. Behaviour. , 1-90 (2018).
- Rössler, T., et al. Using an Innovation Arena to compare wild-caught and laboratory Goffin´s cockatoos. Scientific Reports. 10 (1), 8681 (2020).
- Laumer, I. B., Bugnyar, T., Auersperg, A. M. I. Flexible decision-making relative to reward quality and tool functionality in Goffin cockatoos (Cacatua goffiniana). Scientific Reports. 6, 28380 (2016).
- Friard, O., Gamba, M. BORIS: a free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- R. Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. , (2020).
- McCullagh, P., Nelder, J. A. Generalized linear models. Monographs on Statistics and Applied Probability. , (1989).
- Forstmeier, W., Schielzeth, H. Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner's curse. Behavioral Ecology and Sociobiology. 65 (1), 47-55 (2011).
- Kaiser, H. F. The application of electronic computers to factor analysis. Educational and Psychological Measurement. 20 (1), 141-151 (1960).
- . Online 3D Viewer Available from: https://github.com/lovacsv/Online3DViewer (2021)
- Greenberg, R. S., Mettke-Hofmann, C. Ecological aspects of neophobia and neophilia in birds. Current Ornithology. 16, 119-169 (2001).
- Mettke-Hofmann, C., Winkler, H., Leisler, B. The Significance of Ecological Factors for Exploration and Neophobia in Parrots. Ethology. 108 (3), 249-272 (2002).
- O'Hara, M., et al. The temporal dependence of exploration on neotic style in birds. Scientific Reports. 7 (1), 4742 (2017).
- Chevalier-Skolnikoff, S., Liska, J. O. Tool use by wild and captive elephants. Animal Behaviour. 46 (2), 209-219 (1993).
- Benson-Amram, S., Weldele, M. L., Holekamp, K. E. A comparison of innovative problem-solving abilities between wild and captive spotted hyaenas, Crocuta crocuta. Animal Behaviour. 85 (2), 349-356 (2013).
- Gajdon, G. K., Fijn, N., Huber, L. Testing social learning in a wild mountain parrot, the kea (Nestor notabilis). Animal Learning and Behavior. 32 (1), 62-71 (2004).
- Shettleworth, S. J. . Cognition, Evolution, and Behavior. , (2009).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved