
Zum Anzeigen dieser Inhalte ist ein JoVE-Abonnement erforderlich. Melden Sie sich an oder starten Sie Ihre kostenlose Testversion.
Method Article
Taktiler halbautomatischer Passiv-Finger-Winkelstimulator (TSPAS)
In diesem Artikel
Zusammenfassung
Präsentiert wird der taktile semiautomatische Passiv-Finger-Winkelstimulator TSPAS, eine neue Möglichkeit, taktile räumliche Schärfe und taktile Winkeldiskriminierung mit einem computergesteuerten taktilen Stimulussystem zu bewerten, das erhöhte Winkelreize auf das passive Fingerpad eines Subjekts anwendet und dabei Bewegungsgeschwindigkeit, Entfernung und Kontaktdauer steuert.
Zusammenfassung
Passive taktile Wahrnehmung ist die Fähigkeit, stimulierende Informationen aus der Haut passiv und statisch wahrzunehmen; zum Beispiel ist die Fähigkeit, räumliche Informationen zu spüren, die stärkste in der Haut an den Händen. Diese Fähigkeit wird als taktile räumliche Schärfe bezeichnet und wird durch die taktile Schwelle oder Diskriminierungsschwelle gemessen. Derzeit wird die Zwei-Punkte-Schwelle weitgehend als Maß für die taktile räumliche Schärfe verwendet, obwohl viele Studien gezeigt haben, dass kritische Defizite bei der Zwei-Punkt-Diskriminierung bestehen. Daher wurde ein computergesteuertes taktiles Stimulussystem entwickelt, der taktile semiautomatische Passivfingerwinkelstimulator (TSPAS), der die taktile Winkeldiskriminierungsschwelle als neues Maß für taktile räumliche Schärfe verwendet. Das TSPAS ist ein einfaches, einfach zu bedienendes System, das erhöhte Winkelreize auf das passive Fingerpad eines Motivs anwendet und dabei Bewegungsgeschwindigkeit, Entfernung und Kontaktdauer steuert. Die Komponenten des TSPAS werden detailliert beschrieben, ebenso wie das Verfahren zur Berechnung der Schwellenwertfür die Diskriminierung in taktilen Winkeln.
Einleitung
Die Berührungswahrnehmung ist eine grundlegende Form der Empfindungen, die vom somatosensorischen System verarbeitet werden, einschließlich haptischer Wahrnehmung und taktiler Wahrnehmung. Passive taktile Wahrnehmung, im Gegensatz zur aktiven Exploration, bedeutet, dass das Objekt bewegt wird, um Kontakt mit statischer Haut1,2zu machen. Wie in anderen Sinnen wird die räumliche Auflösung in der taktilen Wahrnehmung, auch als taktile räumliche Schärfe bezeichnet, in der Regel durch die taktile Schwelle, die Erkennungsschwelle oder die Diskriminierungsschwelle2,3dargestellt. In den letzten 100 Jahren wurde die Zwei-Punkte-Schwelle häufig als Maß für die taktile räumliche Schärfe4verwendet. Viele Studien haben jedoch gezeigt, dass der Zwei-Punkte-Schwellenwert ein ungültiger Index der taktilen räumlichen Fähigkeit ist, da Zweipunktdiskriminierung (TPD) nicht räumliche Hinweise nicht ausschließen kann (z. B. wenn zwei Punkte zu nahe sind, können sie ein einzelnes affektives empfängliches Feld lokalisieren, das leicht eine erhöhte neuronale Aktivität hervorruft) und ein stabiles Kriterium für die Antworten3,4,5beibehalten können). Aufgrund der Anzahl der Nachteile von TPD wurden mehrere neue und vielversprechende Methoden als Ersatz entwickelt, wie taktile Gitterorientierung (GO)3,6, Zweipunkt-Orientierungsdiskriminierung5, erhöhte Buchstabenerkennung, Lückenerkennung7, Punktmuster, Landolt C Ringe8und Winkeldiskriminierung (AD)9,10. Aufgrund der Vorteile des Betriebs von GO sowie der räumlichen Struktur und Komplexität des verwendeten Stimulus wird GO derzeit zunehmend zur Messung der taktilen räumlichen Schärfe11,12,13verwendet.
Obwohl man davon ausgeht, dass sich taktiles GO auf zugrunde liegende räumliche Mechanismen stützt und damit ein zuverlässiges Maß für die taktile räumliche Schärfe liefert, wird immer noch diskutiert, ob die GO-Leistung teilweise durch nicht räumliche Hinweise 14 beeinflusst wird (z.B. intensive Anzeichen, die einen Hinweis auf die Identifizierung des Unterschieds zwischen Orientierungsreizen liefern können). Darüber hinaus besteht GO nur aus einfachen räumlichen Orientierungsaufgaben (d.h. horizontalen und vertikalen) Aufgaben und beinhaltet in erster Linie die sensorische Verarbeitung, die seine Verwendung bei der Erforschung des hierarchischen Zusammenspiels zwischen taktiler Primärverarbeitung im primären somatosensorischen Kortex und dem taktilen fortgeschrittenen Besitz mit dem hinteren parietalen Kortex (PPC) und dem supramarginalen Gyrus (SMG)15,16,17einschränkt. Um diese Nachteile auszugleichen, wurde taktile AD entwickelt, um taktile räumliche Schärfe9,10zu messen. In AD gleiten passiv zwei Winkel über die Fingerspitze. Die Winkel variieren in der Größe, und der Betreff muss bestimmen, welcher der Winkel größer ist. Um diese Aufgabe konsequent zu erfüllen, müssen räumliche Merkmale taktiler Winkel dargestellt und im Arbeitsgedächtnis gespeichert und dann verglichen und erkannt werden. Daher beinhaltet taktile AD nicht nur primäre Verarbeitung, sondern auch fortgeschrittene Kognition der taktilen Wahrnehmung, wie Arbeitsgedächtnis und Aufmerksamkeit.
Wie in einer Vielzahl von Linienorientierungswahrnehmungstests wird das Motiv in taktiler AD sukzessive mit einem Bezugswinkel und einem Vergleichswinkel dargestellt und wird gebeten anzugeben, welcher der größere Winkel18,19,20,21ist. Die Linien, die die Winkel zusammenstellen, sind gleich lang und symmetrisch entlang eines imaginären Bisektors verteilt. Durch symmetrisches Ändern der räumlichen Bemaßungen der Linien können alle Arten von erhöhten Ebenenwinkeln erstellt werden. Ein entscheidender Vorteil dieser Methode besteht daher darin, dass die differenzierten Winkel ähnliche räumliche Strukturen aufweisen. Darüber hinaus ist die räumliche Darstellung, die im AD gewonnen wird, sequenzieller als die in GO gewonnene. Der AD-Schwellenwert liefert jedoch Beweise dafür, dass taktile räumliche Schärfe ausreicht, um eine räumliche Diskriminierung zwischen Objekten zu ermöglichen22. Darüber hinaus kann die taktile räumliche Wahrnehmung des Winkels von Punkt zu Linie erlebt werden und schließlich einen zweidimensionalen Ebenenwinkel bilden, in dem nicht räumliche Hinweise nur eine kleine Rolle spielen können.
Es wurde festgestellt, dass die AD-Schwelle mit zunehmendem Alter zunimmt, was auf die Notwendigkeit einer hohen kognitiven Belastung in der taktilen AD-Aufgabe zurückzuführen sein könnte. So, Es kann einen Überwachungsmechanismus in kognitive Beeinträchtigung Diagnose9,10. Obwohl die AD-Leistung durch den altersbedingten Rückgang beeinträchtigt wird, kann sie bei jungen Menschen durch kontinuierliche Weiterbildung oder ähnliche taktile Aufgabenausbildung deutlich verbessert werden23. Darüber hinaus zeigten fMRI-Studien, dass eine verzögerte Taktwinkelaufgabe mit Übereinstimmung mit Derstichprobe bestimmte kortikale Bereiche aktivierte, die für das Arbeitsgedächtnis verantwortlich waren, wie z. B. der hintere parietale Kortex17,24. Diese Ergebnisse deuten darauf hin, dass taktile Winkeldiskriminierung eine vielversprechende Maßnahme für taktile räumliche Schärfe mit fortgeschrittener Kognition ist. Hier wird die taktile AD-Ausrüstung und ihre Verwendung ausführlich beschrieben. Andere taktile Forscher können die AD-Geräte reproduzieren und in ihrer Forschung verwenden.
Die taktile AD-Ausrüstung oder der taktile halbautomatische Passivfingerwinkelstimulator (TSPAS) verwendet einen elektronischen Schlitten, um ein Paar Winkelreize zu transportieren, um passiv über die Haut zu gleiten (Abbildung 1). Die Arme der Probanden liegen bequem, auf einer Tischplatte. Die rechte Hand sitzt auf einer Handplatte in der Tabelle, und ein Zeigefingerpad befindet sich etwas unterhalb der Öffnung der Platte. Computersoftware kann die Folie steuern, sie mit einer festen Geschwindigkeit bewegen und vorwärts und rückwärts bewegen. Wenn sich die Folie vorwärts bewegt, gleiten die Winkelreize passiv mit fester Geschwindigkeit über die Haut, beginnend mit der Fingerspitze. Wenn sich die Folie rückwärts in ihre Ausgangsposition bewegt und sich in ein anderes Paar Winkelreize ändert, muss das Subjekt den Zeigefinger nach oben heben und auf einen Befehl warten, um ihn wieder leicht an der Öffnung zu platzieren. So präsentiert das Gerät taktile Winkelreize bei kontrollierter Geschwindigkeit, stabile Kontaktdauer und konstantes Interstimulus-Intervall. Der Betreff meldet mündlich eine Sequenznummer, und der Experimentator registriert sie als Antwort und führt die nächste Studie durch.

Abbildung 1: Übersicht über das TSPAS.
Das Gerät besteht aus vier Teilen: 1) taktilen Winkelreizen (d. h. dem Referenzwinkel und zehn Vergleichswinkeln); 2) die Handplatte, die die Hand des Motivs an Ort und Stelle fixiert und nur den Zeigefinger in Kontakt mit den Reizen hält; 3) der elektronische Schieber, der die taktilen Reize trägt; und 4) das PC-Steuerungssystem, das die Geschwindigkeit und den Bewegungsabstand des elektronischen Dias steuert. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Protokoll
Schriftliche informierte Zustimmung wurde von den Probanden in Übereinstimmung mit den Richtlinien der lokalen medizinischen Ethik-Kommission der Okayama Universität eingeholt. Die Testverfahren erhielten Überprüfung und Zustimmung von der lokalen medizinischen Ethikkommission der Okayama Universität.
1. Detaillierte Zusammensetzung und Funktion der Ausrüstung
- Taktile Winkelreize
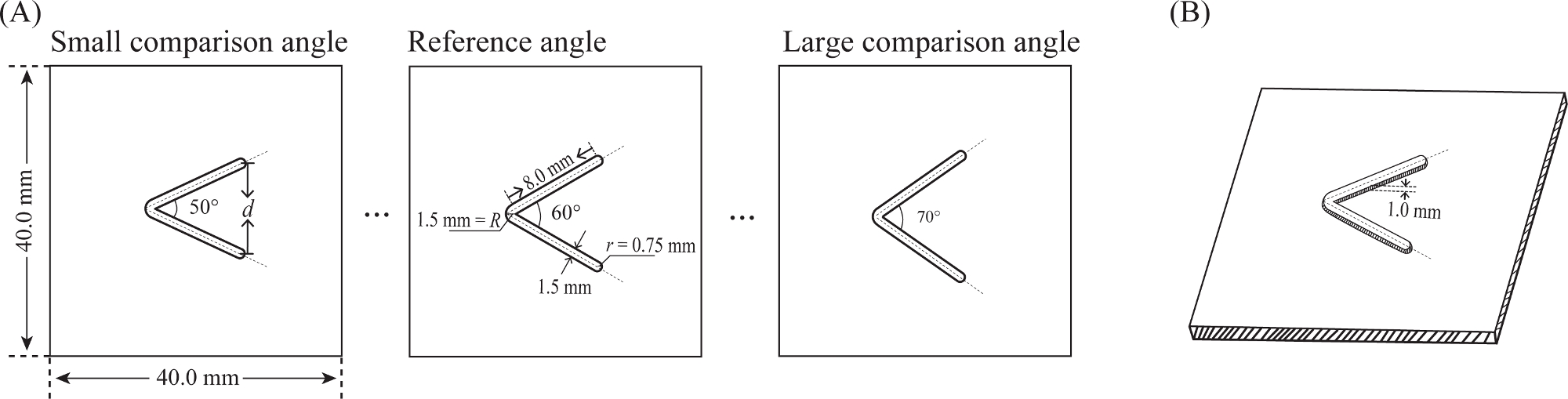
- Das TSPAS verwendet zweidimensionale (2D) erhöhte Winkel, um passiv über die Haut zu gleiten und eine taktile räumliche Darstellung der Winkel zu bilden (Abbildung 2). Die taktilen Winkel bestehen aus Kunststofflinien und quadratischen Sockeln, die beide aus einer transparenten Acrylfolie bestehen. Da die Linien, aus denen die Winkel bestehen, gleich und symmetrisch sind, können durch symmetrische Änderung der räumlichen Bemaßungen der Linien alle Arten erhöhter Ebenenwinkel erstellt werden.
- Schneiden Sie die Acrylplatte mit einer Fräsmaschine symmetrisch entlang eines imaginären Bisektors und der quadratischen Basis (40,0 mm lang und breit, 3,0 mm hoch) symmetrisch in die Polylinie mit zwei gleichen Linien (8,0 mm lang, 1,5 mm breit und 1,0 mm hoch).
- Kleben Sie die Polylinie an die Mitte der quadratischen Basis, um einen 2D-erhöhten taktilen Winkelreiz zu erzeugen.
- Stellen Sie Stücke mit Winkelgrößen von 50° bis 70° in 2°-Schritten her. Die Endpunktabstände (d, siehe Abbildung 2) dieser Winkel sind 6,8 mm, 7,0 mm, 7,3 mm, 7,5 mm, 7,8 mm, 8,0 mm (60° Winkel), 8,2 mm, 8,5 mm, 8,7 mm, 8,9 mm und 9,2 mm. Um den Einfluss des Endpunktabstandes auf die Winkeldiskriminierung auf ein Minimum zu reduzieren, verwenden Sie einen 60°-Winkel als Referenzwinkel und andere Winkel als Vergleichswinkel.
- Besteht aus 20 Paaren diskriminierter Winkel, darunter 20 identische Referenzwinkel und 10 Paare identischer Vergleichswinkel, deren gemessene Genauigkeiten ± 0,2° liegen. Stellen Sie sicher, dass der Referenzwinkel zuerst 50 % der Zeit angezeigt wird, in der jedes Paar getestet wird. Das Experiment kann einfach und bequem mit taktilen Winkelreizen aktualisiert werden.

Abbildung 2: Beispiel für taktile Winkelreize.
(A) Ein Beispiel für den Referenzwinkel (60°) und zwei (50° und 70°) der zehn im Experiment verwendeten Vergleichswinkel. Insbesondere wurden detaillierte Parameter des Referenzwinkels gezeichnet. d stellt den Endpunktabstand dar, R den Krümmungsradius im lokalen Scheitelpunkt und r den Krümmungsradius im Endpunkt. (B) Beispiel für einen erhöhten Winkel in 3D. Die Höhe der erhöhten Linie beträgt 1,0 mm von der 3D-Ansicht. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
- Handplatte
- Um die Hand des Motivs zu stabilisieren, fertigen Sie eine Handplatte senkrecht zum elektronischen Schlitten(Abbildung 3). Zuerst schneiden Sie mit einer Fräsmaschine eine 5,0 mm dicke Acrylplatte in eine 14,0 cm x 22,0 cm Rechteckplatte und befestigen Sie dann die Rechteckplatte mit Klebeband und Kleber (14,0 cm breit, 14,0 cm lang und 8,5 cm hoch). Danach schneiden Sie mit einer Fräsmaschine eine rechteckige Öffnung (2,5 cm breit und 5,0 cm lang) in die obere linke Ecke der Platte. Dadurch kann nur der Zeigefinger den Winkelreiz aufnehmen. Fixieren Sie vor dem Experiment das rechte Handgelenk des Probanden mit Nylonband, und weisen Sie die Probanden dann an, ihre rechten Zeigefinger leicht an der Öffnung der Platte zu platzieren.

Abbildung 3: Handposition des Motivs und taktile Winkelreize Bewegungsrichtung.
Die rechte Hand des Motivs wurde mit Nylonband gesichert, und das Motiv wurde angewiesen, seinen rechten Zeigefinger in die Öffnung in der Platte zu legen. Die Winkelreize wurden auf das Gerät geklemmt und durch die elektronische Rutsche horizontal bewegt, um passiv über das Fingerpad zu gleiten. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
- Motorisierter Linearschlitten
- Der elektronische Schlitten mit einem maximalen Bewegungsabstand von 51,0 cm wird mit einem einfachen linearen Bewegungsmotor mit 5,0 cm Höhe, 5,4 cm Breite und 71,0 cm Länge (siehe Materialtabelle) in gerader Richtung bewegt, ein Linearbewegungssystem. Verbinden Sie den Motor mit einem PC und legen Sie verschiedene Daten mithilfe einer dedizierten Datenbearbeitungssoftware fest und bearbeiten Sie sie (siehe Tabelle der Materialien). Stellen Sie sicher, dass diese Einstellungen dazu führen können, dass die elektronische Folie einen bestimmten Abstand mit einer bestimmten Geschwindigkeit in Bezug auf den Referenzpunkt verschiebt. Dies ist notwendig, wenn die Winkelreize direkt von einer beliebigen Position an eine bestimmte Position bewegt werden.
- Computersteuerung
- Das TSPAS ist ein halbautomatisches, computergesteuertes System. Die Datenbearbeitungssoftware zur Steuerung der Bewegung des Dias ist PC-basierte Software zur Bearbeitung der für den Betrieb motorisierten Aktoren notwendigen Daten. Legen Sie im Experiment die Geschwindigkeit des Schlittens auf 20 mm/s und seinen Bewegungsabstand auf 80 mm für jede Versuchsstudie fest. Jedes Mal, wenn auf eine Schaltfläche geklickt wird, wird die Folie wie zuvor festgelegt verschoben.
2. Ausführen eines Experiments
- Vor dem Experiment Legen Sie zunächst den Bewegungstyp als 'INC'fest , Bewegungsabstand als '80 mm', Bewegungsgeschwindigkeit als '20 mm/s', Bewegungsfunktion als 'Single' und Achse als 'ID = 0' in der Datenbearbeitungssoftware (siehe Betriebsanleitung in der Tabelle der Materialien für Anweisungen zum Einstellen von Parametern), um sicherzustellen, dass sich der elektronische Schlitten sowohl in einem Abstand von 80 mm und einer Geschwindigkeit von 20 mm/s vorwärts und rückwärts bewegen kann, als auch bei anderen Geschwindigkeiten.
- Rekrutieren Sie Probanden, deren Finger frei von Verletzungen und Callus sind. Versuchen Sie, eine gleiche Anzahl von männlichen und weiblichen Probanden im Alter von 18 bis 35 Jahren zu rekrutieren. Beachten Sie, dass es einen Unterschied in der taktilen räumlichen Schärfe zwischen weiblichen und männlichen Probanden, sowie alten und jungen Probanden25,26gibt.
- Augenbinde das Subjekt und setzen Sie ihn oder sie an einen Tisch mit dem Gerät (Abbildung 1). Befestigen Sie die rechte Hand des Motivs mit Nylonband und weisen Sie das Subjekt anschließend an, seinen rechten Zeigefinger leicht an der Öffnung der Handplatte zu platzieren (Abbildung 3).
- Klemmen Sie ein Winkelpaar, einschließlich des Referenzwinkels und des Vergleichswinkels, auf dem Dia. Nach dem Anklicken der Schaltfläche wird das Winkelpaar für einen Gesamtabstand von 80 mm gleiten. Sie gehen passiv mit einer Geschwindigkeit von 20 mm/s über das Zeigefingerpad. Da zwischen dem Referenzwinkel und dem Vergleichswinkel ein Abstand von 31,8 ± 0,8 mm liegt, beträgt ihr Interstimulus-Zeitintervall etwa 1,6 s.
- Nachdem das Subjekt die Größe der Winkel wahrnimmt, meldet er mündlich, welcher der beiden Winkel größer ist. Wenn der Betreff nicht erkennen kann, welcher Winkel größer ist, kann er oder sie angeben, dass die Winkel identisch sind. Registrieren Sie die Antwort des Betreffs als Antwortdaten. Danach wird das nächste Winkelpaar kontinuierlich ersetzt, präsentiert und auf die gleiche Weise wahrgenommen.
- Es gibt insgesamt 10 Winkelpaare im formalen Experiment. Präsentieren Sie jedes Paar 10x in einer pseudozufälligen Reihenfolge, in der der Referenzwinkel zuerst 50% der Zeit vergeht. Somit enthält das Experiment 100 Versuche. Um unangenehme Empfindungen am Zeigefinger zu vermeiden, hat das Motiv nach jeder Serie von 20 Studien eine 3-min Pause eingelegt. Vor dem Experiment praktiziert jeder Versuch 10 Versuche mit anderen Blickwinkeln, um mit dem experimentellen Verfahren vertraut zu sein. Das Experiment sollte 40 min dauern.
Ergebnisse
In dieser Studie wurden die 3AFC-Technik (3-alternative Erzwungenwahl) und die logistische Kurve verwendet, um den taktilen AD-Schwellenwert zu schätzen. Die Teilnehmer wurden angewiesen, den größeren der beiden wahrgenommenen Winkel mündlich zu melden, oder wenn sie den Unterschied nicht erkannten, konnten sie dasselbe angeben. Die Gleichung der logistischen Kurve, die häufig auf psychophysikalische Experimente angewendet wurde, um Schwellenwerte27,28,...
Diskussion
Ein neues Maß für die taktile räumliche Schärfe, die taktile AD, wird vorgestellt. In diesem System gleitet ein Paar Winkel passiv über das immobilisierte Zeigefingerpad eines Motivs. AD kombiniert die Vorteile von GO und TPD und reduziert die Wirkung intensiver Hinweise und die neuronale Spitzenimpulsrate eines einzelnen Punktes. Diese Studie zeigt, dass sich die Wahrnehmungsdiskriminierung allmählich ändert, da sich der Winkelunterschied zwischen dem Referenzwinkel und dem Vergleichswinkel4
Offenlegungen
Die Autoren erklären, dass sie keine konkurrierenden Interessenkonflikte haben, weder finanziell noch anderweitig.
Danksagungen
Diese Arbeit wurde von der Japan Society for the Promotion of Science KAKENHI Grants JP17J40084, JP18K15339, JP18H05009, JP18H01411, JP18K18835 und JP17K18855 unterstützt. Wir danken auch dem Techniker (Yoshihiko Tamura) in unserem Labor, dass er uns bei der Herstellung des erhöhten Winkels geholfen hat.
Materialien
| Name | Company | Catalog Number | Comments |
| Acrylic sheet (3 mm) | MonotaRO Co.,Ltd. | 33159874 | Good Material |
| Acrylic sheet (1 mm) | MonotaRO Co.,Ltd. | 45547101 | Good Material |
| EZ limo (easy linear motion motor) | ORIENTAL MOTOR CO., LTD. Made in Japan | EZS3 | Good Motorized Linear Slides |
| Data Editing Software | ORIENTAL MOTOR CO., LTD. Made in Japan | EZED2 | easy to use |
| Operating Manual (Orientalmotor) | ORIENTAL MOTOR CO., LTD. Made in Japan | HL-17151-2 | Good Guidebook |
Referenzen
- Smith, A. M., Chapman, C. E., Donati, F., Fortier-Poisson, P., Hayward, V. Perception of simulated local shapes using active and passive touch. Journal of Neurophysiology. 102 (6), 3519-3529 (2009).
- Reuter, E. M., Voelcker-Rehage, C., Vieluf, S., Godde, B. Touch perception throughout working life: Effects of age and expertise. Experimental Brain Research. 216 (2), 287-297 (2012).
- Craig, J. C. Grating orientation as a measure of tactile spatial acuity. Somatosensory and Motor Research. 16 (3), 197-206 (1999).
- Craig, J. C., Johnson, K. O. The two-point threshold: Not a measure of tactile spatial resolution. Current Directions in Psychological Science. 9 (1), 29-32 (2000).
- Tong, J., Mao, O., Goldreich, D. Two-point orientation discrimination versus the traditional two-point test for tactile spatial acuity assessment. Frontiers in Human Neuroscience. 7, 1-11 (2013).
- Goldreich, D., Wong, M., Peters, R. M., Kanics, I. M. A tactile automated passive-finger stimulator (TAPS). Journal of Visualized Experiments. (28), e1374 (2009).
- Johnson, K. O., Phillips, J. R. Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition. Journal of Neurophysiology. 46 (6), 1177-1191 (1981).
- Legge, G. E., Madison, C., Vaughn, B. N., Cheong, A. M. Y., Miller, J. C. Retention of high tactile acuity throughout the life span in blindness. Perception and Psychophysics. 70 (8), 1471-1488 (2008).
- Yang, J., Ogasa, T., Ohta, Y., Abe, K., Wu, J. Decline of human tactile angle discrimination in patients with mild cognitive impairment and Alzheimer's disease. Journal of Alzheimer's Disease. 22 (1), 225-234 (2010).
- Wu, J., Yang, J., Ogasa, T. Raised-angle discrimination under passive finger movement. Perception. 39 (7), 993-1006 (2010).
- Sathian, K., Zangaladze, A. Tactile learning is task specific but transfers between fingers. Perception and Psychophysics. 59 (1), 119-128 (1997).
- Wong, M., Peters, R. M., Goldreich, D. A physical constraint on perceptual learning: tactile spatial acuity improves with training to a limit set by finger size. Journal of Neuroscience. 33 (22), 9345-9352 (2013).
- Trzcinski, N. K., Gomez-Ramirez, M., Hsiao, S. S. Functional consequences of experience-dependent plasticity on tactile perception following perceptual learning. European Journal of Neuroscience. 44 (6), 2375-2386 (2016).
- Essock, E. A., Krebs, W. K., Prather, J. R. Superior Sensitivity for Tactile Stimuli Oriented Proximally-Distally on the Finger: Implications for Mixed Class 1 and Class 2 Anisotropies. Journal of Experimental Psychology: Human Perception and Performance. 23 (2), 515-527 (1997).
- Gurtubay-Antolin, A., Leon-Cabrera, P., Rodriguez-Fornells, A. Neural evidence of hierarchical cognitive control during Haptic processing: An fMRI study. eNeuro. 5 (6), (2018).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Yu, Y., Yang, J., Ejima, Y., Fukuyama, H., Wu, J. Asymmetric Functional Connectivity of the Contra- and Ipsilateral Secondary Somatosensory Cortex during Tactile Object Recognition. Frontiers in Human Neuroscience. 11, (2018).
- Olczak, D., Sukumar, V., Pruszynski, J. A. Edge orientation perception during active touch. Journal of Neurophysiology. 120 (5), 2423-2429 (2018).
- Lederman, S. J., Taylor, M. M. Perception of interpolated position and orientation by vision and active touch. Perception and Psychophysics. 6 (3), 153-159 (1969).
- Peters, R. M., Staibano, P., Goldreich, D. Tactile orientation perception: An ideal observer analysis of human psychophysical performance in relation to macaque area 3b receptive fields. Journal of Neurophysiology. 114 (6), 3076-3096 (2015).
- Bensmaia, S. J., Hsiao, S. S., Denchev, P. V., Killebrew, J. H., Craig, J. C. The tactile perception of stimulus orientation. Somatosensory and Motor Research. 25 (1), 49-59 (2008).
- Morash, V., Pensky, A. E. C., Alfaro, A. U., McKerracher, A. A review of haptic spatial abilities in the blind. Spatial Cognition and Computation. 12 (2-3), 83-95 (2012).
- Wang, W., et al. Tactile angle discriminability improvement: roles of training time intervals and different types of training tasks. Journal of Neurophysiology. 122 (5), 1918-1927 (2019).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Peters, R. M., Hackeman, E., Goldreich, D. Diminutive Digits Discern Delicate Details: Fingertip Size and the Sex Difference in Tactile Spatial Acuity. Journal of Neuroscience. 29 (50), 15756-15761 (2009).
- Sathian, K., Zangaladze, A., Green, J., Vitek, J. L., DeLong, M. R. Tactile spatial acuity and roughness discrimination: Impairments due to aging and Parkinson's disease. Neurology. 49 (1), 168-177 (1997).
- Hoehler, F. K. Logistic equations in the analysis of S-shaped curves. Computers in Biology and Medicine. 5 (3), 367-371 (1995).
- Kuehn, E., Doehler, J., Pleger, B. The influence of vision on tactile Hebbian learning. Scientific Reports. 7 (1), 1-11 (2017).
- Weder, B., Nienhusmeier, M., Keel, A., Leenders, K. L., Ludin, H. P. Somatosensory discrimination of shape: Prediction of success in normal volunteers and parkinsonian patients. Experimental Brain Research. 120 (1), 104-108 (1998).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten