
È necessario avere un abbonamento a JoVE per visualizzare questo. Accedi o inizia la tua prova gratuita.
Method Article
Stimolatore ad angolo passivo-dito semiautomatico tattile (TSPAS)
In questo articolo
Riepilogo
Presentato è lo stimolatore tSPAS tspas ad angolo passivo semiautomato tattile, un nuovo modo per valutare l'acuità spaziale tattile e la discriminazione dell'angolo tattile utilizzando un sistema di stimolo tattile controllato dal computer che applica stimoli ad angolo rialzato al fingerpad passivo di un soggetto, controllando al contempo la velocità di movimento, la distanza e la durata del contatto.
Abstract
La percezione tattile passiva è la capacità di percepire passivamente e staticamente le informazioni di stimolo provenienti dalla pelle; ad esempio, la capacità di percepire l'informazione spaziale è la più forte nella pelle sulle mani. Questa capacità è definita acuità spaziale tattile ed è misurata dalla soglia tattile o soglia di discriminazione. Attualmente, la soglia dei due punti è ampiamente utilizzata come misura dell'acuità spaziale tattile, sebbene molti studi abbiano indicato che esistono deficit critici nella discriminazione in due punti. Pertanto, è stato sviluppato un sistema di stimolo tattile controllato dal computer, lo stimolatore tspas (passive-finger angle stimulator) semiautomatico tattile, utilizzando la soglia di discriminazione dell'angolo tattile come nuova misura per l'acuità spaziale tattile. Il TSPAS è un sistema semplice e facilmente azionabile che applica stimoli ad angolo rialzato al fingerpad passivo di un soggetto, controllando al contempo la velocità di movimento, la distanza e la durata del contatto. Le componenti del TSPAS sono descritte in dettaglio e la procedura per calcolare la soglia di discriminazione dell'angolo tattile.
Introduzione
La percezione del tatto è una forma fondamentale delle sensazioni elaborate dal sistema somatosensoriale, tra cui la percezione aptica e la percezione tattile. La percezione tattile passiva, in contrapposizione all'esplorazione attiva, significa che l'oggetto viene spostato per prendere contatto con la pellestatica 1,2. Come in altri sensi, la risoluzione spaziale nella percezione tattile, definita anche acuità spaziale tattile, è solitamente rappresentata dalla soglia tattile, dalla soglia di rilevamento o dalla soglia didiscriminazione 2,3. Negli ultimi 100 anni, la soglia dei due punti è stata comunemente utilizzata come misura dell'acuità spaziale tattile4. Tuttavia, molti studi hanno indicato che la soglia dei due punti è un indice non valido di capacità spaziale tattile perché la discriminazione a due punti (TPD) non può escludere segnali non spaziali (ad esempio, se due punti sono troppo vicini, possono localizzare un singolo campo ricettivofferente, che evoca prontamente una maggiore attività neurale) e mantenere un criterio stabile perle risposte 3,4,5. A causa del numero di inconvenienti della TPD, diversi metodi nuovi e promettenti sono stati sviluppati come sostituti, come l'orientamento della griglia tattile (GO)3,6,la discriminazione di orientamento in duepunti 5, il riconoscimentodelle lettere alzate, il rilevamento delle lettere7,i modelli di punti, gli anelli landolt C8e la discriminazione dell'angolo (AD)9,10. Attualmente, a causa dei vantaggi nel funzionamento di GO, nonché della struttura spaziale e della complessità dello stimolo utilizzato, GO è sempre più utilizzato per misurare l'acuitàspaziale tattile 11,12,13.
Sebbene si pensa che il GO tattile si basi sui meccanismi spaziali sottostanti, producendo così una misura affidabile dell'acuità spaziale tattile, si discute ancora se le prestazioni GO siano in parte influenzate da segnali non spaziali14 (ad esempio, segni intensivi che possono fornire uno spunto per identificare la differenza tra gli stimoli di orientamento). Inoltre, GO consiste solo in semplici compiti di orientamento spaziale (cioè orizzontale e verticale) e coinvolge principalmente l'elaborazione sensoriale, che ne limita l'uso quando si esplora l'interazione gerarchica tra l'elaborazione primaria tattile nella corteccia somatosensoriale primaria e il possesso avanzato tattile che coinvolge la corteccia parietale posteriore (PPC) e il giro sopramarginale (SMG)15,16,17. Per compensare questi inconvenienti, è stato sviluppato l'AD tattile per misurare l'acuitàspaziale tattile 9,10. In Active Uniti, un paio di angoli scivolano passivamente sulla punta delle dita. Gli angoli variano in dimensioni e il soggetto deve determinare quale degli angoli è più grande. Per svolgere in modo coerente questo compito, le caratteristiche spaziali degli angoli tattili devono essere rappresentate e memorizzate nella memoria di lavoro e quindi confrontate e discernere. Pertanto, l'AD tattile comporta non solo l'elaborazione primaria, ma anche la cognizione avanzata della percezione tattile, come la memoria di lavoro e l'attenzione.
Come in una varietà di test di percezione dell'orientamento della linea, nell'AD tattile il soggetto viene presentato successivamente con un angolo di riferimento e un angolo di confronto e viene chiesto di indicare quale è l'angolopiù grande 18,19,20,21. Le linee che compongono gli angoli sono uguali in lunghezza e distribuite simmetricamente lungo un bisettore immaginario. Modificando simmetricamente le dimensioni spaziali delle linee, è possibile creare tutti i tipi di angoli piani rialzati. Pertanto, un vantaggio critico di questo metodo è che gli angoli differenziati hanno strutture spaziali simili. Inoltre, la rappresentazione spaziale acquisita nell'AD è più sequenziale di quella acquisita in GO. Tuttavia, la soglia ad fornisce la prova che l'acuità spaziale tattile è sufficiente per consentire la discriminazione spaziale tra glioggetti 22. Inoltre, la percezione spaziale tattile dell'angolo può essere sperimentata da un punto all'altro e infine formare un angolo piana bidimensionale in cui gli spunti non spaziali possono svolgere solo un piccolo ruolo.
Si è riscontrato che la soglia di active ad aumenta con l'aumentare dell'età, che potrebbe derivare dalla necessità di un elevato carico cognitivo nell'attività ad tattile. Pertanto, può fornire un meccanismo di monitoraggio nella diagnosi di deficitcognitivo 9,10. Sebbene le prestazioni dell'AD siano influenzate dal declino legato all'età, possono essere notevolmente migliorate nei giovani mediante una formazione continua o una formazione tattile simile23. Inoltre, studi fMRI hanno dimostrato che un compito di angolo tattile match-to-sample ritardato ha attivato alcune regioni corticali responsabili della memoria di lavoro, come la corteccia parietale posteriore17,24. Questi risultati suggeriscono che la discriminazione dell'angolo tattile è una misura promettente per l'acuità spaziale tattile che comporta una cognizione avanzata. Qui, l'apparecchiatura AD tattile e il suo uso sono descritti in dettaglio. Altri ricercatori tattili possono riprodurre l'apparecchiatura AD e usarla nella loro ricerca.
L'apparecchiatura AD tattile, o stimolatore ad angolo passivo-dito semiautomatico tattile (TSPAS), utilizza uno scivolo elettronico per trasmettere un paio di stimoli angolari per scivolare passivamente sulla pelle (Figura 1). Le braccia dei soggetti giacciono comodamente, prostrate su un tavolo. La mano destra si trova su una piastra della mano nel tavolo e un dita indice si trova leggermente sotto l'apertura della piastra. Il software per computer può controllare la diapositiva, spostarla a una velocità fissa e spostarla avanti e indietro. Mentre la diapositiva si muove in avanti, gli stimoli angolari scivolano passivamente sulla pelle a una velocità fissa a partire dalla punta delle dita. Quando la diapositiva si sposta all'indietro nella posizione iniziale e passa a un'altra coppia di stimoli angolari, il soggetto deve sollevare il dito indice verso l'alto e attendere che un ordine lo posizionare leggermente all'apertura. Pertanto, l'apparecchiatura presenta stimoli dell'angolo tattile a velocità controllata, durata di contatto stabile e intervallo interstimolo costante. Il soggetto riporta oralmente un numero di sequenza e lo sperimentatore lo registra come risposta e procede allo svolgimento della prova successiva.

Figura 1: Panoramica del TSPAS.
L'attrezzatura è composta da quattro parti: 1) stimoli dell'angolo tattile (cioè l'angolo di riferimento e dieci angoli di confronto); 2) la piastra della mano che fissa la mano del soggetto in posizione e mantiene solo l'indice a contatto con gli stimoli; 3) il cursore elettronico che trasporta gli stimoli tattili; e 4) il sistema di controllo del personal computer (PC) che controlla la velocità e la distanza di movimento dello scivolo elettronico. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
Protocollo
Il consenso informato scritto è stato ottenuto dai soggetti nel rispetto delle politiche del comitato etico medico locale dell'Università di Okayama. Le procedure di test hanno ottenuto la revisione e il consenso del comitato etico medico locale dell'Università di Okayama.
1. Composizione dettagliata e funzione delle attrezzature
- Stimoli dell'angolo tattile
- Il TSPAS utilizza angoli rialzati bidimensionali (2D) per scorrere passivamente sulla pelle e formare una rappresentazione spaziale tattile degli angoli (Figura 2). Gli angoli tattili sono costituiti da linee di plastica e basi quadrate, entrambe realizzate con un foglio acrilico trasparente. Poiché le linee che compongono gli angoli sono uguali e simmetriche, modificando simmetricamente le dimensioni spaziali delle linee, è possibile creare tutti i tipi di angoli piani rialzati.
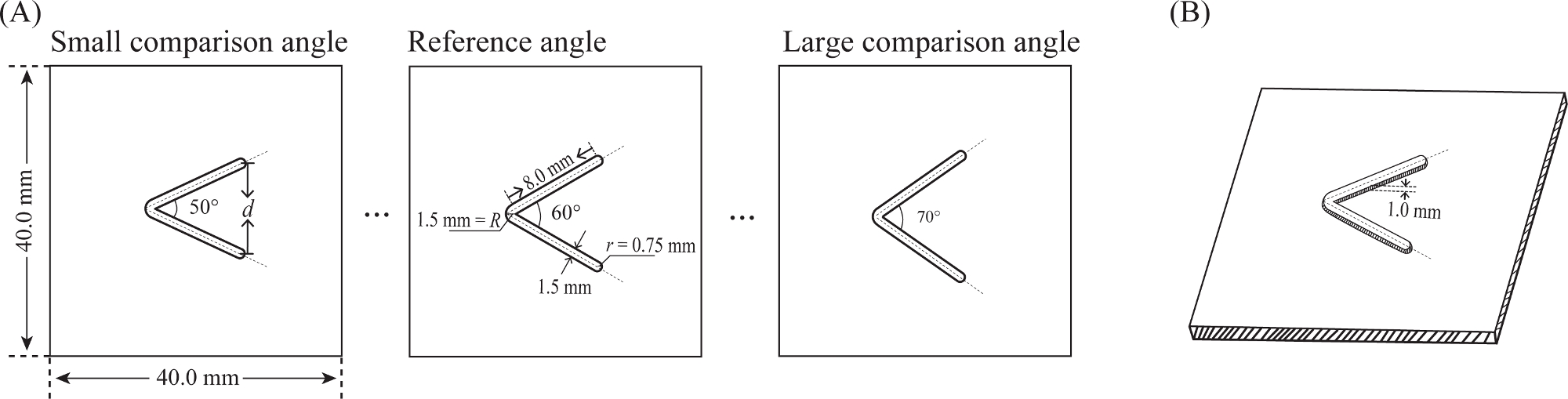
- Utilizzando una fresatrice, tagliare il foglio acrilico nella polilinea con due linee uguali (lunghe 8,0 mm, larghe 1,5 mm e alte 1,0 mm) distribuite simmetricamente lungo un bisettore immaginario e la base quadrata (lunga 40,0 mm e larga, alta 3,0 mm).
- Incollare la polilinea al centro della base quadrata per creare uno stimolo dell'angolo tattile sollevato 2D.
- Realizzare pezzi con dimensioni angolari che vanno da 50° a 70° in incrementi di 2°. Le distanze del punto finale (d, vedi figura 2) di questi angoli sono 6,8 mm, 7,0 mm, 7,3 mm, 7,5 mm, 7,8 mm, 8,0 mm (angolo 60°), 8,2 mm, 8,5 mm, 8,7 mm, 8,9 mm e 9,2 mm. Per ridurre al minimo l'impatto della distanza del punto finale sulla discriminazione dell'angolo, utilizzate un angolo di 60° come angolo di riferimento e altri angoli come angoli di confronto.
- Compongono 20 coppie di angoli discriminati, tra cui 20 angoli di riferimento identici e 10 coppie di angoli di confronto identici le cui accuratezze misurate sono ± 0,2°. Assicurarsi che l'angolo di riferimento sia presentato per primo il 50% delle volte in cui ogni coppia viene testata. L'esperimento può essere facilmente e convenientemente aggiornato con stimoli dell'angolo tattile.

Figura 2: Esempio di stimoli dell'angolo tattile.
(A) Esempio dell'angolo di riferimento (60°) e due (50° e 70°) dei dieci angoli di confronto utilizzati nell'esperimento. In particolare, sono stati tracciati parametri dettagliati dell'angolo di riferimento. d rappresenta la distanza del punto finale, R rappresenta il raggio di curvatura nell'apice locale e r rappresenta il raggio di curvatura nel punto finale. (B) Esempio di angolo rialzato visto in 3D. L'altezza della linea rialzata è di 1,0 mm dalla vista 3D. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Piatto a mano
- Per stabilizzare la mano del soggetto, creare una piastra a mano perpendicolare allo scivolo elettronico (Figura 3). In primo luogo, utilizzando una fresatrice, tagliare un foglio acrilico spesso 5,0 mm in una piastra rettangolare di 14,0 cm x 22,0 cm, quindi fissare la piastra rettangolare a una base (larga 14,0 cm, lunga 14,0 cm e alta 8,5) con nastro adesivo e colla. Successivamente, utilizzando una fresatrice, tagliare un'apertura rettangolare (larga 2,5 cm e lunga 5,0 cm) nell'angolo in alto a sinistra della piastra. Ciò consente solo al dito indice di contattare lo stimolo dell'angolo. Prima dell'esperimento, fissare il polso destro del soggetto con nastro di nylon, quindi istruire i soggetti a posizionare leggermente le dita dell'indice destro all'apertura della piastra.

Figura 3: Posizione della mano del soggetto e direzione del movimento degli stimoli dell'angolo tattile.
La mano destra del soggetto era fissata con nastro di nylon e al soggetto fu ordinato di posizionare il dito indice destro nell'apertura nella piastra. Gli stimoli angolari erano fissati sull'apparato e venivano spostati orizzontalmente dallo scivolo elettronico per scivolare passivamente attraverso il fingerpad. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Scorrimento lineare motorizzato
- Lo scivolo elettronico con una distanza massima di movimento di 51,0 cm viene spostato in direzione dritta utilizzando un facile motore a movimento lineare con 5,0 cm di altezza, 5,4 cm di larghezza e 71,0 cm di lunghezza (vedi Tabella dei materiali),che è un sistema a movimento lineare. Collegare il motore a un personal computer e impostare e modificare vari dati utilizzando un software di modifica dei dati dedicato (vedere Table of Materials). Assicurarsi che queste impostazioni possano fare in modo che la diapositiva elettronica sposti una distanza specificata utilizzando una determinata velocità rispetto al punto di riferimento. Ciò è necessario quando si spostano gli stimoli dell'angolo direttamente da una posizione arbitraria a una posizione specificata.
- Sistema di controllo informatico
- Il TSPAS è un sistema semiautomatico controllato da computer. Il software di editing dati utilizzato per controllare il movimento della diapositiva è un software basato su PC per la modifica dei dati necessari per il funzionamento degli attuatori motorizzati. Nell'esperimento, impostare la velocità dello scivolo a 20 mm/s e la sua distanza di movimento a 80 mm per ogni prova. Ogni volta che si fa clic su un pulsante, la diapositiva si sposta come impostato in precedenza.
2. Esecuzione di un esperimento
- Prima dell'esperimento, impostare prima il tipo di movimento come 'INC',distanza di movimento come '80 mm', velocità di movimento come '20 mm/s', il movimento funziona come 'singolo', e asse come 'ID = 0' nel software di editing dati (vedi il manuale d'uso nella Tabella dei Materiali per istruzioni su come impostare i parametri) per garantire che lo scivolo elettronico possa muoversi sia a una distanza di 80 mm che ad una velocità di 20 mm/s avanti e indietro, e ad altre distanze e velocità.
- Recluta soggetti le cui dita sono libere da lesioni e calli. Cerca di reclutare un numero uguale di soggetti maschi e femmine nella fascia di età dai 18 ai 35 anni. Si noti che c'è una differenza nell'acuità spaziale tattile tra soggetti femminili e maschili, così come soggetti vecchi egiovani 25,26.
- Ben bendare il soggetto e sederlo ad un tavolo con l'apparecchio (Figura 1). Fissare la mano destra del soggetto con nastro di nylon e successivamente istruire il soggetto a posizionare leggermente il dito indice destro all'apertura della piastra della mano (Figura 3).
- Bloccate una coppia di angoli, inclusi l'angolo di riferimento e l'angolo di confronto, sullo scivolo. Dopo aver fatto clic sul pulsante, la coppia di angoli scorre per una distanza totale di 80 mm. Attraversano passivamente il fingerpad indice a una velocità di 20 mm/s. Poiché c'è una distanza di 31,8 ± 0,8 mm tra l'angolo di riferimento e l'angolo di confronto, il loro intervallo di tempo interstimolo è di circa 1,6 s.
- Dopo che il soggetto ha percepito le dimensioni degli angoli, riferisce oralmente quale dei due angoli è più grande. Se il soggetto non è in grado di identificare quale angolo è più grande, può indicare che gli angoli sono gli stessi. Registrare la risposta dell'oggetto come dati di risposta. Successivamente, la prossima coppia di angoli verrà continuamente sostituita, presentata e percepita allo stesso modo.
- Ci sono un totale di 10 coppie di angoli nell'esperimento formale. Presentare ogni coppia 10x in un ordine pseudocasuale in cui l'angolo di riferimento passa per primo il 50% delle volte. Pertanto, l'esperimento contiene 100 prove. Per evitare sensazioni scomode sull'indice, dopo ogni serie di 20 prove il soggetto si prende una pausa di 3 minuti. Prima dell'esperimento, ogni soggetto pratica 10 prove con altre angolazioni per avere familiarità con la procedura sperimentale. L'esperimento dovrebbe durare ~ 40 minuti.
Risultati
In questo studio, la tecnica 3AFC (3-alternative forced-choice) e la curva logistica sono state utilizzate per stimare la soglia ad tattile. Ai partecipanti è stato ordinato di segnalare oralmente il più grande dei due angoli percepiti, o se non hanno rilevato la differenza, potrebbero indicare lo stesso. L'equazione della curva logistica, che è stata comunemente applicata agli esperimenti psicofisici per misurarele soglie 27,28,29...
Discussione
Viene presentata una nuova misura per l'acuità spaziale tattile, l'AD tattile. In questo sistema un paio di angoli scivola passivamente attraverso il dito indice immobilizzato di un soggetto. AD combina i vantaggi di GO e TPD, riducendo l'impatto di segnali intensivi e la frequenza di impulso di picco neurale di un singolo punto. Questo studio mostra che vi è un graduale cambiamento nella discriminazione percettiva man mano che la differenza di angolo cambia tra l'angolo di riferimento e l'angolo dico...
Divulgazioni
Gli autori dichiarano di non avere conflitti di interesse concorrenti, finanziari o di altro tipo.
Riconoscimenti
Questo lavoro è stato supportato dalla Japan Society for the Promotion of Science KAKENHI Grants JP17J40084, JP18K15339, JP18H05009, JP18H01411, JP18K18835 e JP17K18855. Ringraziamo anche il tecnico (Yoshihiko Tamura) nel nostro laboratorio per averci aiutato a creare l'angolo rialzato.
Materiali
| Name | Company | Catalog Number | Comments |
| Acrylic sheet (3 mm) | MonotaRO Co.,Ltd. | 33159874 | Good Material |
| Acrylic sheet (1 mm) | MonotaRO Co.,Ltd. | 45547101 | Good Material |
| EZ limo (easy linear motion motor) | ORIENTAL MOTOR CO., LTD. Made in Japan | EZS3 | Good Motorized Linear Slides |
| Data Editing Software | ORIENTAL MOTOR CO., LTD. Made in Japan | EZED2 | easy to use |
| Operating Manual (Orientalmotor) | ORIENTAL MOTOR CO., LTD. Made in Japan | HL-17151-2 | Good Guidebook |
Riferimenti
- Smith, A. M., Chapman, C. E., Donati, F., Fortier-Poisson, P., Hayward, V. Perception of simulated local shapes using active and passive touch. Journal of Neurophysiology. 102 (6), 3519-3529 (2009).
- Reuter, E. M., Voelcker-Rehage, C., Vieluf, S., Godde, B. Touch perception throughout working life: Effects of age and expertise. Experimental Brain Research. 216 (2), 287-297 (2012).
- Craig, J. C. Grating orientation as a measure of tactile spatial acuity. Somatosensory and Motor Research. 16 (3), 197-206 (1999).
- Craig, J. C., Johnson, K. O. The two-point threshold: Not a measure of tactile spatial resolution. Current Directions in Psychological Science. 9 (1), 29-32 (2000).
- Tong, J., Mao, O., Goldreich, D. Two-point orientation discrimination versus the traditional two-point test for tactile spatial acuity assessment. Frontiers in Human Neuroscience. 7, 1-11 (2013).
- Goldreich, D., Wong, M., Peters, R. M., Kanics, I. M. A tactile automated passive-finger stimulator (TAPS). Journal of Visualized Experiments. (28), e1374 (2009).
- Johnson, K. O., Phillips, J. R. Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition. Journal of Neurophysiology. 46 (6), 1177-1191 (1981).
- Legge, G. E., Madison, C., Vaughn, B. N., Cheong, A. M. Y., Miller, J. C. Retention of high tactile acuity throughout the life span in blindness. Perception and Psychophysics. 70 (8), 1471-1488 (2008).
- Yang, J., Ogasa, T., Ohta, Y., Abe, K., Wu, J. Decline of human tactile angle discrimination in patients with mild cognitive impairment and Alzheimer's disease. Journal of Alzheimer's Disease. 22 (1), 225-234 (2010).
- Wu, J., Yang, J., Ogasa, T. Raised-angle discrimination under passive finger movement. Perception. 39 (7), 993-1006 (2010).
- Sathian, K., Zangaladze, A. Tactile learning is task specific but transfers between fingers. Perception and Psychophysics. 59 (1), 119-128 (1997).
- Wong, M., Peters, R. M., Goldreich, D. A physical constraint on perceptual learning: tactile spatial acuity improves with training to a limit set by finger size. Journal of Neuroscience. 33 (22), 9345-9352 (2013).
- Trzcinski, N. K., Gomez-Ramirez, M., Hsiao, S. S. Functional consequences of experience-dependent plasticity on tactile perception following perceptual learning. European Journal of Neuroscience. 44 (6), 2375-2386 (2016).
- Essock, E. A., Krebs, W. K., Prather, J. R. Superior Sensitivity for Tactile Stimuli Oriented Proximally-Distally on the Finger: Implications for Mixed Class 1 and Class 2 Anisotropies. Journal of Experimental Psychology: Human Perception and Performance. 23 (2), 515-527 (1997).
- Gurtubay-Antolin, A., Leon-Cabrera, P., Rodriguez-Fornells, A. Neural evidence of hierarchical cognitive control during Haptic processing: An fMRI study. eNeuro. 5 (6), (2018).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Yu, Y., Yang, J., Ejima, Y., Fukuyama, H., Wu, J. Asymmetric Functional Connectivity of the Contra- and Ipsilateral Secondary Somatosensory Cortex during Tactile Object Recognition. Frontiers in Human Neuroscience. 11, (2018).
- Olczak, D., Sukumar, V., Pruszynski, J. A. Edge orientation perception during active touch. Journal of Neurophysiology. 120 (5), 2423-2429 (2018).
- Lederman, S. J., Taylor, M. M. Perception of interpolated position and orientation by vision and active touch. Perception and Psychophysics. 6 (3), 153-159 (1969).
- Peters, R. M., Staibano, P., Goldreich, D. Tactile orientation perception: An ideal observer analysis of human psychophysical performance in relation to macaque area 3b receptive fields. Journal of Neurophysiology. 114 (6), 3076-3096 (2015).
- Bensmaia, S. J., Hsiao, S. S., Denchev, P. V., Killebrew, J. H., Craig, J. C. The tactile perception of stimulus orientation. Somatosensory and Motor Research. 25 (1), 49-59 (2008).
- Morash, V., Pensky, A. E. C., Alfaro, A. U., McKerracher, A. A review of haptic spatial abilities in the blind. Spatial Cognition and Computation. 12 (2-3), 83-95 (2012).
- Wang, W., et al. Tactile angle discriminability improvement: roles of training time intervals and different types of training tasks. Journal of Neurophysiology. 122 (5), 1918-1927 (2019).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Peters, R. M., Hackeman, E., Goldreich, D. Diminutive Digits Discern Delicate Details: Fingertip Size and the Sex Difference in Tactile Spatial Acuity. Journal of Neuroscience. 29 (50), 15756-15761 (2009).
- Sathian, K., Zangaladze, A., Green, J., Vitek, J. L., DeLong, M. R. Tactile spatial acuity and roughness discrimination: Impairments due to aging and Parkinson's disease. Neurology. 49 (1), 168-177 (1997).
- Hoehler, F. K. Logistic equations in the analysis of S-shaped curves. Computers in Biology and Medicine. 5 (3), 367-371 (1995).
- Kuehn, E., Doehler, J., Pleger, B. The influence of vision on tactile Hebbian learning. Scientific Reports. 7 (1), 1-11 (2017).
- Weder, B., Nienhusmeier, M., Keel, A., Leenders, K. L., Ludin, H. P. Somatosensory discrimination of shape: Prediction of success in normal volunteers and parkinsonian patients. Experimental Brain Research. 120 (1), 104-108 (1998).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati