
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Тактильный полуавтоматический пассивно-пальцевый угловой стимулятор (TSPAS)
В этой статье
Резюме
Представлен тактильный полуавтомированный пассивно-пальцевый угловой стимулятор TSPAS, новый способ оценки тактильной пространственной остроты и тактильной дискриминации угла с помощью управляемой компьютером тактильной системы стимулирования, которая применяет поднятые угловые стимулы к пассивному подстеху субъекта, контролируя при этом скорость движения, расстояние и продолжительность контакта.
Аннотация
Пассивное тактильное восприятие – это способность пассивно и статично воспринимать информацию о стимулах, поступающих из кожи; например, способность чувствовать пространственную информацию является сильнейшей в коже на руках. Эта способность называют тактильной пространственной остротой и измеряется тактильным порогом или порогом дискриминации. В настоящее время двухо пункта порог широко используется в качестве меры тактильной пространственной остроты, хотя многие исследования показали, что критический дефицит существует в двух точках дискриминации. Поэтому была разработана компьютерная тактильная система стимулирования, тактильный полуавтомированный стимулятор пассивного пальца (TSPAS), использующий тактильный порог дискриминации углов в качестве новой меры для тактильной пространственной остроты. TSPAS является простой, легко управляемой системой, которая применяет поднятые угловые стимулы к пассивному подстуму субъекта, контролируя при этом скорость движения, расстояние и продолжительность контакта. Компоненты TSPAS подробно описаны, а также процедура расчета порога дискриминации по тактильному углу.
Введение
Сенсорное восприятие является основной формой ощущений, обрабатываемых соматосенсорной системой, включая тактильное восприятие и тактильное восприятие. Пассивное тактильное восприятие, в отличие от активного исследования, означает, что объект перемещается, чтобы установить контакт состатической кожей 1,2. Как и в других смыслах, пространственное разрешение в тактильном восприятии, также называют тактильной пространственной остротой, как правило, представлены тактильный порог, порог обнаружения, илидискриминации порог2,3. В последние 100 лет двухоритумный порог обычно используется в качестве меры тактильной пространственной остроты4. Тем не менее, многие исследования показали, что двухоличный порог является недействительным индексом тактильной пространственной способности, потому что двухопунктовая дискриминация (TPD) не может исключить непространственные сигналы (например, если две точки слишком близко, они могут найти одно афферентное восприимчивое поле, которое легко вызывает повышенную нервную активность) и поддерживать стабильныйкритерий ответов 3,4,5. Из-за количества недостатков TPD, несколько новых и перспективных методов были разработаны в качестве замены, такие как тактильная ориентация решетки (GO)3,6,двух точкахориентациидискриминации 5, поднялраспознавание букв, обнаружение разрыва 7, точка моделей, Landolt Cкольца 8, и угол дискриминации (AD)9,10. В настоящее время, из-за преимуществ в эксплуатации GO, а также пространственной структуры и сложности используемого стимула, GO все чаще используется для измерения тактильнойпространственной остроты 11,12,13.
Хотя тактильные GO, как полагаются, полагаются на основные пространственные механизмы, тем самым обеспечивая надежную меру тактильной пространственной остроты, все еще обсуждается, влияет ли производительность GO частично на непространственныесигналы 14 (например, интенсивные признаки, которые могут дать сигнал для определения разницы между стимулами ориентации). Кроме того, GO состоит только из простой пространственной ориентации (т.е. горизонтальных и вертикальных) задач и в первую очередь включает сенсорную обработку, которая ограничивает его использование при изучении иерархического взаимодействия между тактильной первичной обработкой в первичной соматосенсорной коре и тактильными передовыми, обладающими с участием задней теменной коры (КПП) и надмаргинальной извилины (SMG)15,16,17. Чтобы компенсировать эти недостатки, тактильные АД был разработан для измерения тактильной пространственнойостроты 9,10. В AD пара углов пассивно скользит по кончику пальца. Углы различаются по размеру, и субъект должен определить, какой из углов больше. Для последовательного выполнения этой задачи пространственные особенности тактильных углов должны быть представлены и сохранены в рабочей памяти, а затем сопоставлены и различимы. Таким образом, тактильная АД включает в себя не только первичную обработку, но и продвинутое познание тактильного восприятия, такого как рабочая память и внимание.
Как и в различных тестах восприятия ориентации линии, в тактильных AD объект представлен последовательно с одним углом отсчета и одним углом сравнения и просят указать,какой угол больше 18,19,20,21. Линии, составляя углы, равны по длине и симметрично распределены по воображаемому бисектору. Симметрично изменяя пространственные размеры линий, можно создать все типы поднятых углов плоскости. Таким образом, критическим преимуществом этого метода является то, что дифференцированные углы имеют схожие пространственные структуры. Кроме того, пространственное представление, полученное в АД, является более последовательным, чем то, что получено в GO. Тем не менее, порог АД дает доказательства того, что тактильной пространственной остроты достаточно, чтобы позволить пространственную дискриминацию междуобъектами 22. Кроме того, тактильное пространственное восприятие угла может быть испытано от точки к линии и, наконец, сформировать двухмерный угол плоскости, в котором непространственные сигналы могут играть лишь небольшую роль.
Было установлено, что порог АД увеличивается с увеличением возраста, что может быть результатом необходимости высокой когнитивной нагрузки в тактильной задаче АД. Таким образом, он может обеспечить механизм мониторинга при диагностике когнитивныхнарушений 9,10. Хотя на производительность АД влияет возрастное снижение, оно может быть значительно улучшено у молодых людей путем непрерывной подготовки или аналогичной тактильной подготовки23. Кроме того, исследования МРТ показали, что задержка матча с образцом тактильной угловой задачи активированы определенные корковые области, ответственные за рабочую память, такие как задняятемная кора 17,24. Эти выводы свидетельствуют о том, что тактильная дискриминация углов является многообещающей мерой для тактильной пространственной остроты, включающей передовое познание. Здесь подробно описано тактильное оборудование AD и его использование. Другие тактильные исследователи могут воспроизвести оборудование AD и использовать его в своих исследованиях.
Тактильное оборудование AD, или тактильный полуавтоматический стимулятор угла пассивного пальца (TSPAS), использует электронный слайд, чтобы передать пару угловых стимулов, чтобы пассивно скользить по коже(рисунок 1). Руки испытуемых лежат удобно, ниц на столешнице. Правая рука сидит на ручной пластине в столе, а указательный блокнот расположен немного ниже открытия пластины. Компьютерное программное обеспечение может управлять слайдом, перемещать его с фиксированной скоростью и перемещать его вперед и назад. Как слайд движется вперед, угол стимулы слайд пассивно по всей коже на фиксированной скорости, начиная с кончика пальца. Когда слайд перемещается назад в исходное положение и переходит на другую пару угловых стимулов, объекту необходимо поднять указательный палец вверх и дождаться приказа слегка поместить его снова на отверстие. Таким образом, оборудование представляет тактильные угловые стимулы на контролируемой скорости, стабильной продолжительности контакта и постоянном межстимульном интервале. Субъект устно сообщает номер последовательности, и экспериментатор регистрирует его в качестве ответа и продолжает проводить следующее испытание.

Рисунок 1: Обзор TSPAS.
Оборудование состоит из четырех частей: 1) тактильных угловых стимулов (т.е. угла отсчета и десяти углов сравнения); 2) ручная пластина, которая фиксирует руку субъекта на месте и держит только указательный палец в контакте с раздражителями; 3) электронный ползунок, который несет тактильные стимулы; и 4) система управления персональным компьютером (ПК), которая контролирует скорость и расстояние движения электронного слайда. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
протокол
Письменное информированное согласие было получено от субъектов в соответствии с политикой местного комитета медицинской этики Университета Окаяма. Процедуры тестирования получили отзыв и согласие местного комитета по медицинской этике Университета Окаяма.
1. Подробный состав и функция оборудования
- Тактильные угловые стимулы
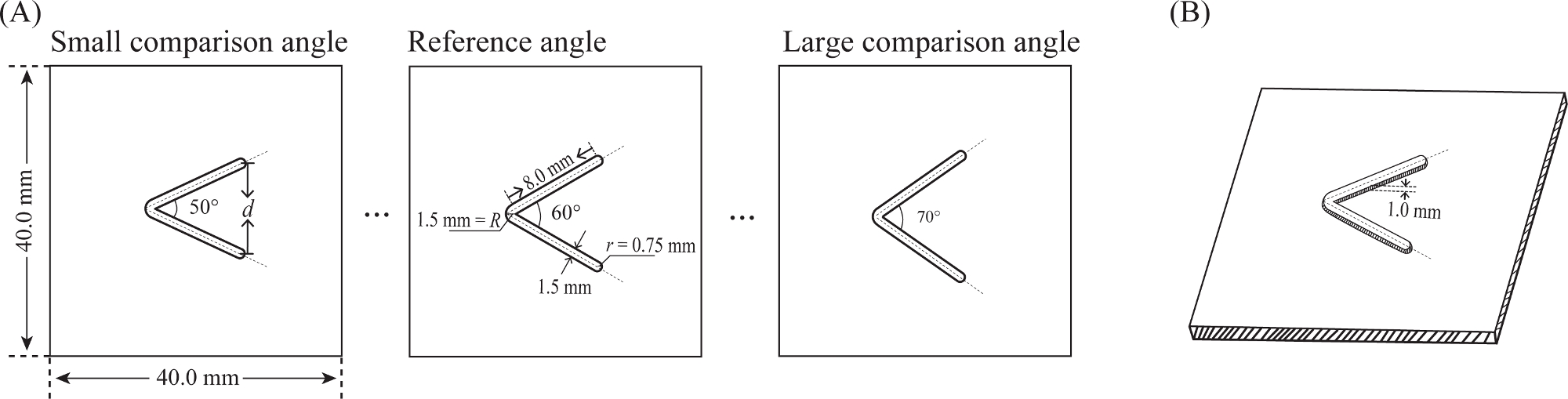
- TSPAS использует двумерные (2D) поднятые углы, чтобы пассивно скользить по коже и формировать тактильное пространственное представление углов(рисунок 2). Тактильные углы состоят из пластиковых линий и квадратных оснований, которые сделаны из прозрачного акрилового листа. Поскольку линии, составляя углы, равны и симметричны, симметрично изменяя пространственные размеры линий, могут быть созданы все типы поднятых углов плоскости.
- Используя фрезерную машину, вырежьте акриловый лист на полилин двумя равными линиями (8,0 мм в длину, 1,5 мм в ширину и 1,0 мм в высоту) симметрично распределены вдоль воображаемого бисектора и квадратной базы (40,0 мм в длину и ширину, 3,0 мм в высоту).
- Клей полилин к центру квадратного основания, чтобы создать 2D поднял тактильный угол стимула.
- Сделать куски с угловых размеров в диапазоне от 50 "до 70" в 2 "приращений. Конечные точки расстояния(d, см. рисунок 2) из этих углов 6,8 мм, 7,0 мм, 7,3 мм, 7,5 мм, 7,8 мм, 8,0 мм (угол 60 "), 8,2 мм, 8,5 мм, 8,7 мм, 8,9 мм и 9,2 мм. Чтобы уменьшить влияние расстояния конечной точки на дискриминацию угла до минимума, используйте угол 60 градусов в качестве угла отсчета и другие углы в качестве углов сравнения.
- Составить 20 пар дискриминируемых углов, в том числе 20 одинаковых углов и 10 пар одинаковых углов сравнения, чьи измеренные ± 0,2 ". Убедитесь, что угол отсчета представлен в 50% случаев при тестировании каждой пары. Эксперимент можно легко и удобно обновить тактильными угловыми стимулами.

Рисунок 2: Пример тактильных угловых стимулов.
(A)Пример угла отсчета (60 градусов) и двух (50 и 70 градусов) из десяти углов сравнения, используемых в эксперименте. В частности, были нарисованы подробные параметры угла отсчета. d представляет собой расстояние конечной точки, R представляет радиус кривизны в локальной вершине, а r представляет радиус кривизны в конечной точке. (B)Пример поднятого угла, замеченного в 3D. Высота поднятой линии составляет 1,0 мм от 3D-вида. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
- Ручная пластина
- Чтобы стабилизировать руку субъекта, создайте ручную пластину перпендикулярно электронной горке(рисунок 3). Сначала с помощью фрезерной машины вырежьте акриловый лист толщиной 5,0 мм в прямоугольную пластину толщиной 14,0 см, а затем прикрепите прямоугольную пластину к основанию (14,0 см в ширину, 14,0 см в длину и 8,5 с высокой) лентой и клеем. После этого, используя фрезерную машину, вырежьте прямоугольное отверстие (2,5 см в ширину и 5,0 см в длину) в верхнем левом углу пластины. Это позволяет только указательный палец, чтобы связаться с угловым стимулом. Перед экспериментом зафиксируйте запястье правой руки субъекта нейлоновой лентой, а затем поручите испытуемым слегка разместить свои правые указательные пальцы при открытии пластины.

Рисунок 3: Положение руки субъекта и тактильный угол стимулов движения направления.
Правая рука субъекта была закреплена нейлоновой лентой, и субъекту было поручено поместить его или ее правый указательный палец в отверстие в пластине. Угловые стимулы были зажаты на аппарате и были горизонтально перемещены электронным слайдом, чтобы пассивно скользить по гингерпаду. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
- Моторизованная линейная горка
- Электронная горка с максимальным расстоянием движения 51,0 см перемещается в прямом направлении с помощью легкого линейного двигателя движения с высотой 5,0 см, шириной 5,4 см и длиной 71,0 см (см. таблицу материалов),которая является линейно-двигательной системой. Подключите двигатель к персонального компьютера и установите и отредактировать различные данные с помощью специального программного обеспечения для редактирования данных (см. таблицу материалов). Убедитесь, что эти настройки могут заставить электронный слайд перемещаться на заданное расстояние, используя заданную скорость по отношению к точке отсчета. Это необходимо при перемещении угловых стимулов непосредственно из произвольного положения в заданное положение.
- Компьютерная система управления
- TSPAS является полуавтоматической, управляемой компьютером системой. Программное обеспечение для редактирования данных, используемое для управления движением слайда, является программным обеспечением на базе ПК для редактирования данных, необходимых для работы моторизованных приводов. В эксперименте установите скорость слайда на уровне 20 мм/с и его расстояние движения на уровне 80 мм для каждого испытания. Каждый раз, когда кнопка нажата, слайд перемещается, как было установлено ранее.
2. Запуск эксперимента
- Перед экспериментом сначала установите тип движения как'INC',расстояние движения как'80 мм',скорость движения, как '20 мм / с', движение функции, как 'одного', и оси, как ' ID No 0 'в программномобеспечении редактирования данных (см. руководство по эксплуатации в таблице материалов для инструкций о том, как установить параметры), чтобы гарантировать, что электронный слайд может двигаться как на расстоянии 80 мм и скорость 20 мм / с вперед и назад, и на других расстояниях и скоростях.
- Набирать субъектов, чьи пальцы свободны от травм и мозолей. Попробуйте набрать равное количество мужчин и женщин субъектов в возрасте от 18 до 35 лет. Обратите внимание, что существует разница в тактильной пространственной остроте между женскими и мужскими предметами, а также старымии молодыми предметами 25,26.
- С завязанными глазами субъекта и сидеть его или ее за столом с аппаратом (Рисунок 1). Зафиксировать правую руку субъекта нейлоновой лентой и впоследствии проинструктировать субъекта слегка поместить его или ее правый указательный палец при открытии ручной пластины(рисунок 3).
- Зажимьте пару углов, включая угол отсчета и угол сравнения, на слайде. После нажатия кнопки пара углов скользит на общую дистанцию 80 мм. Они пассивно идут по указательной панели со скоростью 20 мм/с. Поскольку расстояние между углом отсчета и углом сравнения составляет 31,8 ± 0,8 мм, их интерстимулусный интервал времени составляет примерно 1,6 с.
- После того, как субъект воспринимает размеры углов, он или она устно сообщает, какой из двух углов больше. Если объект не может определить, какой угол больше, он или она может указать, что углы одинаковы. Зарегистрируйте ответ субъекта в качестве данных ответа. После этого следующая пара углов будет постоянно заменяться, преподносятся и восприниматься одинаково.
- В формальном эксперименте в общей сложности 10 пар углов. Представляем каждую пару 10x в порядке псевдорандома, в котором угол отсчета проходит первые 50% времени. Таким образом, эксперимент содержит 100 испытаний. Чтобы избежать неудобных ощущений на указательный палец, после каждой серии из 20 испытаний субъект взять 3 мин перерыва. Перед экспериментом каждый предмет практикует 10 испытаний с другими углами, чтобы быть знакомым с экспериментальной процедурой. Эксперимент должен длиться 40 минут.
Результаты
В этом исследовании для оценки тактильного порога АД использовались метод 3AFC (3-альтернативный принудительный выбор) и логистическая кривая. Участникам было поручено устно сообщить о более крупных из двух предполагаемых углов, или если они не обнаружили разницы, они могут указать то же...
Обсуждение
Представлена новая мера тактильной пространственной остроты, тактильная АД. В этой системе пара углов пассивно скользит по обездвиженной указательной панели пальца субъекта. AD сочетает в себе преимущества GO и TPD, уменьшая влияние интенсивных сигналов и нейронной пиковой импульсной ск...
Раскрытие информации
Авторы заявляют, что у них нет конкурирующих конфликтов интересов, финансовых или иных.
Благодарности
Эта работа была поддержана Японское общество содействия науке KAKENHI Гранты JP17J40084, JP18K15339, JP18H05009, JP18H01411, JP18K18835, и JP17K18855. Мы также благодарим техника (Yoshihiko Tamura) в нашей лаборатории за помощь в разработке поднятого угла.
Материалы
| Name | Company | Catalog Number | Comments |
| Acrylic sheet (3 mm) | MonotaRO Co.,Ltd. | 33159874 | Good Material |
| Acrylic sheet (1 mm) | MonotaRO Co.,Ltd. | 45547101 | Good Material |
| EZ limo (easy linear motion motor) | ORIENTAL MOTOR CO., LTD. Made in Japan | EZS3 | Good Motorized Linear Slides |
| Data Editing Software | ORIENTAL MOTOR CO., LTD. Made in Japan | EZED2 | easy to use |
| Operating Manual (Orientalmotor) | ORIENTAL MOTOR CO., LTD. Made in Japan | HL-17151-2 | Good Guidebook |
Ссылки
- Smith, A. M., Chapman, C. E., Donati, F., Fortier-Poisson, P., Hayward, V. Perception of simulated local shapes using active and passive touch. Journal of Neurophysiology. 102 (6), 3519-3529 (2009).
- Reuter, E. M., Voelcker-Rehage, C., Vieluf, S., Godde, B. Touch perception throughout working life: Effects of age and expertise. Experimental Brain Research. 216 (2), 287-297 (2012).
- Craig, J. C. Grating orientation as a measure of tactile spatial acuity. Somatosensory and Motor Research. 16 (3), 197-206 (1999).
- Craig, J. C., Johnson, K. O. The two-point threshold: Not a measure of tactile spatial resolution. Current Directions in Psychological Science. 9 (1), 29-32 (2000).
- Tong, J., Mao, O., Goldreich, D. Two-point orientation discrimination versus the traditional two-point test for tactile spatial acuity assessment. Frontiers in Human Neuroscience. 7, 1-11 (2013).
- Goldreich, D., Wong, M., Peters, R. M., Kanics, I. M. A tactile automated passive-finger stimulator (TAPS). Journal of Visualized Experiments. (28), e1374 (2009).
- Johnson, K. O., Phillips, J. R. Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition. Journal of Neurophysiology. 46 (6), 1177-1191 (1981).
- Legge, G. E., Madison, C., Vaughn, B. N., Cheong, A. M. Y., Miller, J. C. Retention of high tactile acuity throughout the life span in blindness. Perception and Psychophysics. 70 (8), 1471-1488 (2008).
- Yang, J., Ogasa, T., Ohta, Y., Abe, K., Wu, J. Decline of human tactile angle discrimination in patients with mild cognitive impairment and Alzheimer's disease. Journal of Alzheimer's Disease. 22 (1), 225-234 (2010).
- Wu, J., Yang, J., Ogasa, T. Raised-angle discrimination under passive finger movement. Perception. 39 (7), 993-1006 (2010).
- Sathian, K., Zangaladze, A. Tactile learning is task specific but transfers between fingers. Perception and Psychophysics. 59 (1), 119-128 (1997).
- Wong, M., Peters, R. M., Goldreich, D. A physical constraint on perceptual learning: tactile spatial acuity improves with training to a limit set by finger size. Journal of Neuroscience. 33 (22), 9345-9352 (2013).
- Trzcinski, N. K., Gomez-Ramirez, M., Hsiao, S. S. Functional consequences of experience-dependent plasticity on tactile perception following perceptual learning. European Journal of Neuroscience. 44 (6), 2375-2386 (2016).
- Essock, E. A., Krebs, W. K., Prather, J. R. Superior Sensitivity for Tactile Stimuli Oriented Proximally-Distally on the Finger: Implications for Mixed Class 1 and Class 2 Anisotropies. Journal of Experimental Psychology: Human Perception and Performance. 23 (2), 515-527 (1997).
- Gurtubay-Antolin, A., Leon-Cabrera, P., Rodriguez-Fornells, A. Neural evidence of hierarchical cognitive control during Haptic processing: An fMRI study. eNeuro. 5 (6), (2018).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Yu, Y., Yang, J., Ejima, Y., Fukuyama, H., Wu, J. Asymmetric Functional Connectivity of the Contra- and Ipsilateral Secondary Somatosensory Cortex during Tactile Object Recognition. Frontiers in Human Neuroscience. 11, (2018).
- Olczak, D., Sukumar, V., Pruszynski, J. A. Edge orientation perception during active touch. Journal of Neurophysiology. 120 (5), 2423-2429 (2018).
- Lederman, S. J., Taylor, M. M. Perception of interpolated position and orientation by vision and active touch. Perception and Psychophysics. 6 (3), 153-159 (1969).
- Peters, R. M., Staibano, P., Goldreich, D. Tactile orientation perception: An ideal observer analysis of human psychophysical performance in relation to macaque area 3b receptive fields. Journal of Neurophysiology. 114 (6), 3076-3096 (2015).
- Bensmaia, S. J., Hsiao, S. S., Denchev, P. V., Killebrew, J. H., Craig, J. C. The tactile perception of stimulus orientation. Somatosensory and Motor Research. 25 (1), 49-59 (2008).
- Morash, V., Pensky, A. E. C., Alfaro, A. U., McKerracher, A. A review of haptic spatial abilities in the blind. Spatial Cognition and Computation. 12 (2-3), 83-95 (2012).
- Wang, W., et al. Tactile angle discriminability improvement: roles of training time intervals and different types of training tasks. Journal of Neurophysiology. 122 (5), 1918-1927 (2019).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Peters, R. M., Hackeman, E., Goldreich, D. Diminutive Digits Discern Delicate Details: Fingertip Size and the Sex Difference in Tactile Spatial Acuity. Journal of Neuroscience. 29 (50), 15756-15761 (2009).
- Sathian, K., Zangaladze, A., Green, J., Vitek, J. L., DeLong, M. R. Tactile spatial acuity and roughness discrimination: Impairments due to aging and Parkinson's disease. Neurology. 49 (1), 168-177 (1997).
- Hoehler, F. K. Logistic equations in the analysis of S-shaped curves. Computers in Biology and Medicine. 5 (3), 367-371 (1995).
- Kuehn, E., Doehler, J., Pleger, B. The influence of vision on tactile Hebbian learning. Scientific Reports. 7 (1), 1-11 (2017).
- Weder, B., Nienhusmeier, M., Keel, A., Leenders, K. L., Ludin, H. P. Somatosensory discrimination of shape: Prediction of success in normal volunteers and parkinsonian patients. Experimental Brain Research. 120 (1), 104-108 (1998).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены