
Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
Dokunsal Yarı Otomatik Pasif Parmak Açısı Uyarıcısı (TSPAS)
Bu Makalede
Özet
Sunulan dokunsal yarı otomatik pasif parmak açısı uyarıcısı TSPAS, dokunsal mekansal keskinlik ve dokunsal açı ayrımcılığını değerlendirmenin yeni bir yoludur bilgisayar kontrollü dokunsal uyaran sistemi kullanarak bir deneğin pasif parmak takımına yükseltilmiş açı uyaranları uygularken, hareket hızı, mesafe ve temas süresini kontrol eder.
Özet
Pasif dokunsal algı, deriden gelen uyaran bilgilerini pasif ve statik olarak algılama yeteneğidir; örneğin, mekansal bilgileri hissetme yeteneği, ciltte ellerdeki en güçlüsüdür. Bu yetenek dokunsal mekansal keskinlik olarak adlandırılan ve dokunsal eşik veya ayrımcılık eşiği ile ölçülür. Şu anda, iki nokta eşiği dokunsal mekansal keskinliğin bir ölçüsü olarak yaygın olarak kullanılmaktadır, ancak birçok çalışma iki noktalı ayrımcılıkta kritik açıkların mevcut olduğunu belirtmiştir. Bu nedenle, dokunsal mekansal keskinlik için yeni bir önlem olarak dokunsal açı ayrımcılık eşiğini kullanan dokunsal yarı otomatik pasif parmak açısı uyarıcısı (TSPAS) olan bilgisayar kontrollü dokunsal uyaran sistemi geliştirilmiştir. TSPAS, hareket hızını, mesafeyi ve temas süresini kontrol ederken, bir deneğin pasif parmak takımına yükseltilmiş açı uyaranları uygulayan basit, kolay çalışan bir sistemdir. TSPAS bileşenleri, dokunsal açı ayrımcılığı eşiğini hesaplama prosedürünün yanı sıra ayrıntılı olarak açıklanmıştır.
Giriş
Dokunma algısı, dokunsal algı ve dokunsal algı da dahil olmak üzere somatosensör sistem tarafından işlenen duyumların temel bir şeklidir. Pasif dokunsal algı, aktif keşfin aksine, nesnenin statik cilt1,2ile temas etmek için taşındığı anlamına gelir. Diğer duyularda olduğu gibi, dokunsal algıda dokunsal çözünürlük, dokunsal mekansal keskinlik olarak da adlandırılan, genellikle dokunsal eşik, algılama eşiği veya ayrımcılık eşiği2,3ile temsil edilir. Son 100 yılda, iki nokta eşiği genellikle dokunsal mekansal keskinlik ölçüsü olarak kullanılmıştır4. Bununla birlikte, birçok çalışma iki nokta eşiğinin dokunsal mekansal yeteneğin geçersiz bir indeksi olduğunu belirtmiştir, çünkü iki noktalı ayrımcılık (TPD) mekansal olmayan ipuçlarını dışlayamaz (örneğin, iki nokta çok yakınsa, kolayca artan sinirsel aktiviteyi çağrıştıran tek bir afferent alıcı alan bulabilirler) ve yanıtlar için istikrarlı bir kriter koruyabilirler3,4,5. TPD'nin dezavantajlarının sayısı nedeniyle, dokunsal ızgara oryantasyonu (GO) 3 ,6,iki noktalı oryantasyon ayrımcılığı5, yükseltilmiş harf tanıma, boşluk algılama7, nokta desenleri, Landolt C halkaları8ve açı ayrımcılığı (AD)9,10gibi birkaç yeni ve umut verici yöntem geliştirilmiştir. Şu anda, GO'nun çalıştırılmasındaki avantajların yanı sıra kullanılan uyaranın mekansal yapısı ve karmaşıklığı nedeniyle, GO dokunsal mekansal keskinliği ölçmek için giderek daha fazla kullanılmaktadır11,12,13.
Dokunsal GO'nun altta yatan mekansal mekanizmalara dayandığı düşünülse de, böylece güvenilir bir dokunsal mekansal keskinlik ölçüsü elde etmek, GO performansının14 uzaysal olmayan ipuçlarından (örneğin, oryantasyon uyaranları arasındaki farkı tanımlamak için bir ipucu sağlayabilecek yoğun işaretler) kısmen etkilenip etkilenmediği hala tartışılır. Ayrıca, GO yalnızca basit mekansal yönlendirmeden oluşur (yani, yatay ve dikey) görevler ve öncelikle, birincil somatosensör kortekste dokunsal birincil işleme ile posterior parietal korteks (PPC) ve supramarginal girus (SMG)15 , 16,17'yiiçeren dokunsal gelişmiş sahiplik arasındaki hiyerarşik etkileşimi keşfederken kullanımını sınırlayan duyusal işlemeyi içerir. Bu dezavantajları telafi etmek için, dokunsal uzamsal keskinliği ölçmek için dokunsal AD geliştirilmiştir9,10. AD'de, bir çift açı pasif olarak parmak ucu boyunca kayar. Açılar boyut olarak değişir ve konunun açılardan hangisinin daha büyük olduğunu belirlemesi gerekir. Bu görevi tutarlı bir şekilde gerçekleştirmek için dokunsal açıların uzamsal özellikleri temsil edilmeli ve çalışma belleğinde depolanmalı ve daha sonra karşılaştırılmalı ve ayırt edilmelidir. Bu nedenle, dokunsal AD sadece birincil işlemeyi değil, aynı zamanda çalışma belleği ve dikkat gibi dokunsal algının gelişmiş bilişini de içerir.
Çeşitli çizgi yönlendirme algı testlerinde olduğu gibi, dokunsal AD'de de konu bir referans açısı ve bir karşılaştırma açısı ile art arda sunulur ve hangisinin daha büyük açı18 , 19,20,21olduğunu belirtmeleri istenir. Açıları oluşturan çizgilerin uzunluğu eşittir ve hayali bir bisector boyunca simetrik olarak dağıtılır. Çizgilerin uzamsal boyutlarını simetrik olarak değiştirerek, her türlü yükseltilmiş düzlem açısı oluşturulabilir. Bu nedenle, bu yöntemin kritik bir avantajı, ayırt edilen açıların benzer uzamsal yapılara sahip olmasıdır. Buna ek olarak, AD'de kazanılan mekansal temsil, GO'da kazanılandan daha sıralıdır. Ancak, AD eşiği dokunsal mekansal keskinliğin nesneler arasında uzamsal ayrımcılığa izin vermek için yeterli olduğuna dair kanıt sağlar22. Ayrıca, açının dokunsal mekansal algısı noktadan çizgiye yaşanabilir ve son olarak uzamsal olmayan ipuçlarının sadece küçük bir rol oynayabileceği iki boyutlu bir düzlem açısı oluşturabilir.
AD eşiğinin artan yaşla birlikte arttığı tespit edildi, bu da dokunsal AD görevinde yüksek bilişsel yük ihtiyacından neden olabilir. Bu nedenle, bilişsel bozukluk tanısında bir izleme mekanizması sağlayabilir9,10. AD performansı yaşa bağlı düşüşten etkilmekle birlikte, sürekli eğitim veya benzeri dokunsal görev eğitimi ile gençlerde önemli ölçüde geliştirilebilir23. Ayrıca, fMRI çalışmaları gecikmiş bir örneklem-örneklem açısı görevinin, arka parietal korteks17,24gibi çalışma belleğinden sorumlu belirli kortikal bölgeleri aktive ettiğini göstermiştir. Bu bulgular, dokunsal açı ayrımcılığının ileri biliş içeren dokunsal mekansal keskinlik için umut verici bir önlem olduğunu göstermektedir. Burada, dokunsal AD ekipmanı ve kullanımı ayrıntılı olarak açıklanmıştır. Diğer dokunsal araştırmacılar AD ekipmanlarını çoğaltabilir ve araştırmalarında kullanabilirler.
Dokunsal AD ekipmanı veya dokunsal yarı otomatik pasif parmak açısı uyarıcısı (TSPAS), cilt boyunca pasif olarak kaymak için bir çift açı uyaranını iletmek için elektronik bir slayt kullanır (Şekil 1). Deneklerin kolları rahatça uzanır, bir masanın üzerine secde eder. Sağ el masadaki bir el plakasına oturur ve plakanın açıklığının biraz altında bir işaret parmak takımı bulunur. Bilgisayar yazılımı slaydı kontrol edebilir, sabit bir hızda taşıyabilir ve ileri ve geri taşıyabilir. Slayt ilerledikçe, açı uyaranları parmak ucundan başlayarak sabit bir hızda cilt boyunca pasif olarak kayar. Slayt başlangıç konumuna geri hareket ettiğinde ve başka bir açı uyaran çiftine dönüştüğünde, konunun işaret parmağını yukarı kaldırması ve açılışa hafifçe yerleştirmek için bir sipariş beklemesi gerekir. Böylece, ekipman dokunsal açı uyaranlarını kontrollü bir hızda, kararlı temas süresinde ve sürekli uyaran aralığında sunar. Konu bir sıra numarasını ağızdan bildirir ve deneyci bunu bir yanıt olarak kaydeder ve bir sonraki denemeyi gerçekleştirmeye devam eder.

Şekil 1: TSPAS'a genel bakış.
Ekipman dört bölümden oluşur: 1) dokunsal açı uyaranları (yani referans açısı ve on karşılaştırma açısı); 2) konunun elini yerinde sabitleyen ve sadece işaret parmağını uyaranlarla temas halinde tutan el plakası; 3) dokunsal uyaranları taşıyan elektronik kaydırıcı; ve 4) elektronik kaydırağın hızını ve hareket mesafesini kontrol eden kişisel bilgisayar (PC) kontrol sistemi. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Protokol
Konulardan, Okayama Üniversitesi yerel tıp etiği komitesinin politikalarına uygun olarak yazılı bilgilendirilmiş onay alınmıştır. Test prosedürleri, Okayama Üniversitesi yerel tıp etiği komitesinden inceleme ve onay aldı.
1. Ekipmanın ayrıntılı bileşimi ve işlevi
- Dokunsal açı uyaranları
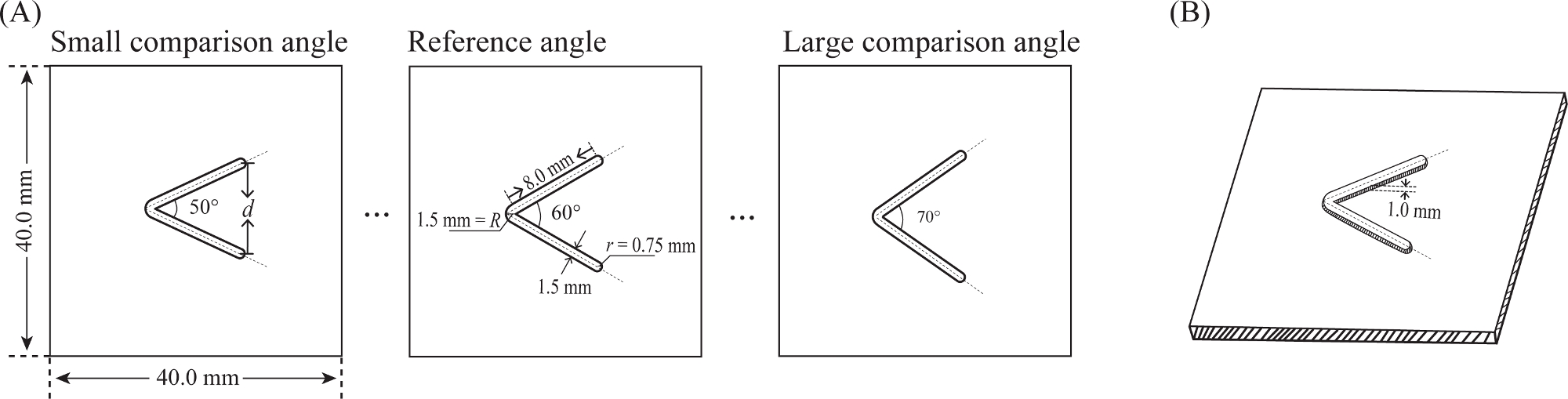
- TSPAS, cilt boyunca pasif olarak kaymak ve açıların dokunsal mekansal bir gösterimini oluşturmak için iki boyutlu (2D) yükseltilmiş açılar kullanır (Şekil 2). Dokunsal açılar, her ikisi de şeffaf bir akrilik levhadan yapılmış plastik çizgilerden ve kare tabanlardan oluşur. Açıları oluşturan çizgiler eşit ve simetrik olduğundan, çizgilerin uzamsal boyutlarını simetrik olarak değiştirerek, her türlü yükseltilmiş düzlem açısı oluşturulabilir.
- Bir freze makinesi kullanarak, akrilik tabakayı hayali bir bisector ve kare taban (40,0 mm uzunluğunda ve genişliğinde, 3,0 mm yüksekliğinde) boyunca simetrik olarak dağılmış iki eşit hat (8,0 mm uzunluğunda, 1,5 mm genişliğinde ve 1,0 mm yüksekliğinde) ile poliline kesin.
- 2D yükseltilmiş dokunsal açı uyaranı oluşturmak için polilini kare tabanın ortasına yapıştırın.
- 2° artışlarla 50° ile 70° arasında değişen açı boyutlarına sahip parçalar yapın. Bu açıların bitiş noktası mesafeleri (d, bkz. Şekil 2) 6,8 mm, 7,0 mm, 7,3 mm, 7,5 mm, 7,8 mm, 8,0 mm (60° açı), 8,2 mm, 8,5 mm, 8,7 mm, 8,9 mm ve 9,2 mm'dir. Uç nokta mesafesinin açı ayrımcılığı üzerindeki etkisini minimuma indirmek için referans açısı olarak 60° açı, karşılaştırma açıları olarak da diğer açıları kullanın.
- Ölçülen doğrulukları 0,2° ± 20 özdeş referans açısı ve 10 çift özdeş karşılaştırma açısı dahil olmak üzere 20 çift ayırt edilmiş açı oluşturur. Her çift test edildiğinde referans açısının ilk %50'sinin sunulduğundan emin olun. Deney dokunsal açı uyaranları ile kolayca ve rahatça güncellenebilir.

Şekil 2: Dokunsal açı uyaranları örneği.
(A) Deneyde kullanılan on karşılaştırma açısının referans açısına (60°) ve iki (50° ve 70°) bir örnek. Özellikle referans açısının detaylı parametreleri çizilmiştir. d bitiş noktası mesafesini, R yerel tepe noktasındaki eğrilik yarıçapını, r ise bitiş noktasındaki eğrilik yarıçapını temsil eder. (B) 3D olarak görülen yükseltilmiş açı örneği. Yükseltilmiş hattın yüksekliği 3D görünümden 1,0 mm'dir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- El plakası
- Öznenin elini stabilize etmek için, elektronik slayda dik bir el plakası üretin (Şekil 3). İlk olarak, bir freze makinesi kullanarak, 5,0 mm kalınlığında bir akrilik levhayı 14,0 cm x 22,0 cm dikdörtgen plakaya kesin ve ardından dikdörtgen plakayı bant ve tutkalla bir tabana (14,0 cm genişliğinde, 14,0 cm uzunluğunda ve 8,5 yüksek) sabitleyin. Bundan sonra, bir freze makinesi kullanarak, plakanın sol üst köşesinde dikdörtgen bir açıklık (2,5 cm genişliğinde ve 5,0 cm uzunluğunda) kesin. Bu, yalnızca işaret parmağının açı uyaranı ile temas etmesine izin verir. Deneyden önce, deneğin sağ el bileğini naylon bantla sabitleyin ve ardından deneklere plakanın açıklığında sağ işaret parmaklarını hafifçe yerleştirmelerini söyleyin.

Şekil 3: Konunun el pozisyonu ve dokunsal açı uyaran hareket yönü.
Deneğin sağ eli naylon bantla sabitlendi ve özneye sağ işaret parmağını plakadaki açıklığa yerleştirmesi talimatı verildi. Açı uyaranları aparat üzerine kenetlendi ve elektronik slayt tarafından yatay olarak hareket ettirilerek parmak ucu boyunca pasif bir şekilde kaydırıldı. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Motorlu doğrusal slayt
- Maksimum hareket mesafesi 51,0 cm olan elektronik kaydırak, doğrusal hareket sistemi olan 5,0 cm yüksekliğinde, 5,4 cm genişliğinde ve 71,0 cm uzunluğunda kolay doğrusal hareket motoru kullanılarak düz yönde hareket ettirilir. Motoru kişisel bir bilgisayara bağlayın ve özel veri düzenleme yazılımı kullanarak çeşitli verileri ayarlayın ve düzenleyin (bkz. Malzeme Tablosu). Bu ayarların, elektronik slaydın referans noktasına göre belirli bir hızı kullanarak belirli bir mesafeyi hareket ettirebildiğine emin olun. Bu, açı uyaranlarını doğrudan rastgele bir konumdan belirli bir konuma taşırken gereklidir.
- Bilgisayar kontrol sistemi
- TSPAS yarı otomatik, bilgisayar kontrollü bir sistemdir. Slaytın hareketini kontrol etmek için kullanılan veri düzenleme yazılımı, motorlu aktüatörlerin çalışması için gerekli verileri düzenlemek için PC tabanlı bir yazılımdır. Deneyde, slaytın hızını 20 mm / s'ye ve hareket mesafesini her deneme için 80 mm olarak ayarlayın. Bir düğme her tıklatıldığında, slayt önceden ayarlanmış olarak hareket eder.
2. Bir deney çalıştırma
- Deneyden önce, önce hareket tipini'INC', hareket mesafesini '80 mm' olarak ayarlayın, '20 mm/ s' olarak hareket hızı, veri düzenleme yazılımında 'tek' olarak hareket fonksiyonu ve 'ID = 0' olarak eksen (parametrelerin nasıl ayarlandırılacağına ilişkin talimatlar için Malzeme Tablosundaki kullanım kılavuzuna bakın) elektronik slaytın hem 80 mm mesafede hem de 20 mm/ s ileri ve geri hızda ve diğer mesafelerde ve hızlarda hareket edebilmesini sağlamak için.
- Parmakları yaralanma ve kalsöz içermeyen denekler alın. 18-35 yaş aralığında eşit sayıda erkek ve kadın denek almaya çalışın. Kadın ve erkek deneklerin yanı sıra yaşlı ve genç denekler arasında dokunsal mekansal keskinlik farkı olduğunu unutmayın25,26.
- Konuyu bağlayın ve aparatla bir masaya oturtun (Şekil 1). Konunun sağ elini naylon bantla sabitleyin ve daha sonra özneye sağ işaret parmağını el plakasının açıklığında hafifçe yerleştirmesini söyleyin (Şekil 3).
- Referans açısı ve karşılaştırma açısı da dahil olmak üzere bir çift açıyı slaytta sıkıştırın. Düğmeye tıkladan sonra, açı çifti toplam 80 mm mesafe için kayar. İşaret parmağından pasif olarak 20 mm/s hızla geçerler. Referans açısı ile karşılaştırma açısı arasında 31,8 ± 0,8 mm mesafe olduğundan, uyaranlar arası zaman aralığı yaklaşık 1,6 s'dir.
- Konu açıların boyutlarını algılayıp, iki açıdan hangisinin daha büyük olduğunu ağızdan bildirir. Denek hangi açının daha büyük olduğunu belirleyemezse, açıların aynı olduğunu gösterebilir. Konunun yanıtını yanıt verileri olarak kaydedin. Bundan sonra, bir sonraki açı çifti sürekli olarak değiştirilecek, sunulacak ve aynı şekilde algılanacaktır.
- Resmi deneyde toplam 10 çift açı vardır. Her çifti, referans açısının zamanın ilk% 50'sini geçtiği bir psödorandom sırasına göre 10x sunun. Böylece, deney 100 deneme içerir. İşaret parmağında rahatsız edici hisleri önlemek için, 20 denemenin her serisinden sonra konu 3 dakika ara verir. Deneyden önce, her denek deneysel prosedüre aşina olmak için diğer açılarla 10 deneme uygular. Deney ~40 dakika sürmelidir.
Sonuçlar
Bu çalışmada dokunsal AD eşiğini tahmin etmek için 3AFC (3 alternatifli zorunlu seçim) tekniği ve lojistik eğri kullanılmıştır. Katılımcılara algılanan iki açıdan daha büyüklerini ağızdan bildirmeleri talimatı verildi veya farkı tespit etmedilerse, aynı şeyi gösterebilirler. 27 ,28,29eşiklerini ölçmek için psikofizik deneylere yaygın olarak uygulanan lojistik eğrinin denklemi:
Tartışmalar
Dokunsal mekansal keskinlik için yeni bir önlem olan dokunsal AD sunulmaktadır. Bu sistemde bir çift açı, bir konunun hareketsiz işaret parmağı boyunca pasif olarak kayar. AD, GO ve TPD'nin avantajlarını birleştirerek yoğun ipuçlarının etkisini ve tek bir noktanın sinirsel tepe darbe hızını azaltır. Bu çalışma, referans açısı ile karşılaştırma açısı arasındaki açı farkı değiştikçe algısal ayrımcılıkta kademeli bir değişiklik olduğunu göstermektedir4...
Açıklamalar
Yazarlar, finansal veya başka bir şekilde rakip çıkar çatışmaları olmadığını beyan ederler.
Teşekkürler
Bu çalışma Japonya Bilimi Teşvik Derneği KAKENHI Grants JP17J40084, JP18K15339, JP18H05009, JP18H01411, JP18K18835 ve JP17K18855 tarafından desteklendi. Ayrıca laboratuvarımızdaki teknisyene (Yoshihiko Tamura) yükseltilmiş açıyı yapmamıza yardımcı olduğu için teşekkür ederiz.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Acrylic sheet (3 mm) | MonotaRO Co.,Ltd. | 33159874 | Good Material |
| Acrylic sheet (1 mm) | MonotaRO Co.,Ltd. | 45547101 | Good Material |
| EZ limo (easy linear motion motor) | ORIENTAL MOTOR CO., LTD. Made in Japan | EZS3 | Good Motorized Linear Slides |
| Data Editing Software | ORIENTAL MOTOR CO., LTD. Made in Japan | EZED2 | easy to use |
| Operating Manual (Orientalmotor) | ORIENTAL MOTOR CO., LTD. Made in Japan | HL-17151-2 | Good Guidebook |
Referanslar
- Smith, A. M., Chapman, C. E., Donati, F., Fortier-Poisson, P., Hayward, V. Perception of simulated local shapes using active and passive touch. Journal of Neurophysiology. 102 (6), 3519-3529 (2009).
- Reuter, E. M., Voelcker-Rehage, C., Vieluf, S., Godde, B. Touch perception throughout working life: Effects of age and expertise. Experimental Brain Research. 216 (2), 287-297 (2012).
- Craig, J. C. Grating orientation as a measure of tactile spatial acuity. Somatosensory and Motor Research. 16 (3), 197-206 (1999).
- Craig, J. C., Johnson, K. O. The two-point threshold: Not a measure of tactile spatial resolution. Current Directions in Psychological Science. 9 (1), 29-32 (2000).
- Tong, J., Mao, O., Goldreich, D. Two-point orientation discrimination versus the traditional two-point test for tactile spatial acuity assessment. Frontiers in Human Neuroscience. 7, 1-11 (2013).
- Goldreich, D., Wong, M., Peters, R. M., Kanics, I. M. A tactile automated passive-finger stimulator (TAPS). Journal of Visualized Experiments. (28), e1374 (2009).
- Johnson, K. O., Phillips, J. R. Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition. Journal of Neurophysiology. 46 (6), 1177-1191 (1981).
- Legge, G. E., Madison, C., Vaughn, B. N., Cheong, A. M. Y., Miller, J. C. Retention of high tactile acuity throughout the life span in blindness. Perception and Psychophysics. 70 (8), 1471-1488 (2008).
- Yang, J., Ogasa, T., Ohta, Y., Abe, K., Wu, J. Decline of human tactile angle discrimination in patients with mild cognitive impairment and Alzheimer's disease. Journal of Alzheimer's Disease. 22 (1), 225-234 (2010).
- Wu, J., Yang, J., Ogasa, T. Raised-angle discrimination under passive finger movement. Perception. 39 (7), 993-1006 (2010).
- Sathian, K., Zangaladze, A. Tactile learning is task specific but transfers between fingers. Perception and Psychophysics. 59 (1), 119-128 (1997).
- Wong, M., Peters, R. M., Goldreich, D. A physical constraint on perceptual learning: tactile spatial acuity improves with training to a limit set by finger size. Journal of Neuroscience. 33 (22), 9345-9352 (2013).
- Trzcinski, N. K., Gomez-Ramirez, M., Hsiao, S. S. Functional consequences of experience-dependent plasticity on tactile perception following perceptual learning. European Journal of Neuroscience. 44 (6), 2375-2386 (2016).
- Essock, E. A., Krebs, W. K., Prather, J. R. Superior Sensitivity for Tactile Stimuli Oriented Proximally-Distally on the Finger: Implications for Mixed Class 1 and Class 2 Anisotropies. Journal of Experimental Psychology: Human Perception and Performance. 23 (2), 515-527 (1997).
- Gurtubay-Antolin, A., Leon-Cabrera, P., Rodriguez-Fornells, A. Neural evidence of hierarchical cognitive control during Haptic processing: An fMRI study. eNeuro. 5 (6), (2018).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Yu, Y., Yang, J., Ejima, Y., Fukuyama, H., Wu, J. Asymmetric Functional Connectivity of the Contra- and Ipsilateral Secondary Somatosensory Cortex during Tactile Object Recognition. Frontiers in Human Neuroscience. 11, (2018).
- Olczak, D., Sukumar, V., Pruszynski, J. A. Edge orientation perception during active touch. Journal of Neurophysiology. 120 (5), 2423-2429 (2018).
- Lederman, S. J., Taylor, M. M. Perception of interpolated position and orientation by vision and active touch. Perception and Psychophysics. 6 (3), 153-159 (1969).
- Peters, R. M., Staibano, P., Goldreich, D. Tactile orientation perception: An ideal observer analysis of human psychophysical performance in relation to macaque area 3b receptive fields. Journal of Neurophysiology. 114 (6), 3076-3096 (2015).
- Bensmaia, S. J., Hsiao, S. S., Denchev, P. V., Killebrew, J. H., Craig, J. C. The tactile perception of stimulus orientation. Somatosensory and Motor Research. 25 (1), 49-59 (2008).
- Morash, V., Pensky, A. E. C., Alfaro, A. U., McKerracher, A. A review of haptic spatial abilities in the blind. Spatial Cognition and Computation. 12 (2-3), 83-95 (2012).
- Wang, W., et al. Tactile angle discriminability improvement: roles of training time intervals and different types of training tasks. Journal of Neurophysiology. 122 (5), 1918-1927 (2019).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Peters, R. M., Hackeman, E., Goldreich, D. Diminutive Digits Discern Delicate Details: Fingertip Size and the Sex Difference in Tactile Spatial Acuity. Journal of Neuroscience. 29 (50), 15756-15761 (2009).
- Sathian, K., Zangaladze, A., Green, J., Vitek, J. L., DeLong, M. R. Tactile spatial acuity and roughness discrimination: Impairments due to aging and Parkinson's disease. Neurology. 49 (1), 168-177 (1997).
- Hoehler, F. K. Logistic equations in the analysis of S-shaped curves. Computers in Biology and Medicine. 5 (3), 367-371 (1995).
- Kuehn, E., Doehler, J., Pleger, B. The influence of vision on tactile Hebbian learning. Scientific Reports. 7 (1), 1-11 (2017).
- Weder, B., Nienhusmeier, M., Keel, A., Leenders, K. L., Ludin, H. P. Somatosensory discrimination of shape: Prediction of success in normal volunteers and parkinsonian patients. Experimental Brain Research. 120 (1), 104-108 (1998).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır