
Method Article
Conjunto de datos de videorradiografía biplanar para el desarrollo de estimaciones de pose basadas en modelos y la capacitación de nuevos usuarios
En este artículo
Resumen
En este trabajo se presenta un conjunto de datos in vivo con posturas óseas estimadas con métodos basados en marcadores. Aquí se incluye un método para entrenar a los operadores en la mejora de sus estimaciones iniciales para la estimación de la pose basada en modelos y la reducción de la variabilidad entre operadores.
Resumen
Medir el movimiento de los huesos pequeños del pie es fundamental para comprender la pérdida patológica de la función. La videorradiografía biplanar es muy adecuada para medir el movimiento óseo in vivo , pero surgen desafíos al estimar la rotación y la traducción (postura) de cada hueso. Por lo general, la posición del hueso se estima con métodos basados en marcadores o modelos. Los métodos basados en marcadores son muy precisos, pero poco comunes in vivo debido a su carácter invasivo. Los métodos basados en modelos son más comunes, pero actualmente son menos precisos, ya que se basan en la entrada del usuario y en algoritmos específicos del laboratorio. Este trabajo presenta un raro conjunto de datos in vivo de las posturas del calcáneo, el astrágalo y la tibia, medidos con métodos basados en marcadores durante la carrera y el salto. Se incluye un método para entrenar a los usuarios para mejorar sus conjeturas iniciales en un software de estimación de pose basado en modelos, utilizando retroalimentación visual basada en marcadores. Los nuevos operadores pudieron estimar las posturas óseas dentro de 2° de rotación y 1 mm de traslación de la postura basada en marcadores, de manera similar a un usuario experto del software basado en modelos, y lo que representa una mejora sustancial con respecto a la variabilidad entre operadores informada anteriormente. Además, este conjunto de datos se puede utilizar para validar otro software de estimación de poses basado en modelos. En última instancia, compartir este conjunto de datos mejorará la velocidad y la precisión con la que los usuarios pueden medir las posturas óseas de la videorradiografía biplanar.
Introducción
La medición del movimiento de los huesos pequeños del pie es fundamental para comprender la pérdida patológica de la función. Sin embargo, la medición dinámica del movimiento óseo del pie es un desafío debido al pequeño tamaño y la configuración densamente empaquetada de los huesos y las articulaciones 1,2. La tecnología de videorradiografía biplanar (BVR) es muy adecuada para medir el movimiento tridimensional (3D) in vivo de los pequeños huesos del pie y el tobillo durante actividades dinámicas. BVR proporciona información sobre la artrocinemática mediante el uso de dos fuentes de rayos X acopladas a intensificadores de imagen, que convierten los rayos X de movimiento dinámico en luz visible. A medida que el pie se mueve a través del volumen de captura, las cámaras de alta velocidad capturan las imágenes. Las imágenes no se distorsionan y se proyectan en el volumen de captura utilizando las posiciones de cámara calibradas 3,4. A continuación, se estiman los seis grados de libertad (6 d. o. f.) de la postura ósea (3 d.o.f. para la posición y 3 d.o.f. para la orientación) utilizando métodos basados en marcadores o en modelos3.
Los métodos de estimación de la posición basados en marcadores o modelos varían según los laboratorios y las disciplinas. El estándar de oro de la medición dinámica de la postura BVR es la implantación de pequeños marcadores de tantalio en el hueso de interés 4,5. Se requiere un mínimo de tres marcadores por hueso para estimar la postura, con marcadores adicionales que conducen a una mayor precisión 5,6. Este método es menos frecuente in vivo debido a su carácter invasivo, ya que requiere implantación quirúrgica y los marcadores se incrustan de forma permanente en el hueso7. Alternativamente, el seguimiento basado en modelos utiliza información volumétrica de otras modalidades de imagen, como la tomografía computarizada (TC) o la resonancia magnética, para recrear el modelo en las imágenes BVR 2,3,8,9,10,11,12,13,14,15 . A continuación, el modelo se manipula semimanualmente para que coincida mejor con las imágenes (rotoscopia), normalmente utilizando una combinación de entradas del usuario como estimación inicial y optimización correlativa cruzada 3,8,9,10,15. La estimación de la posición basada en modelos es menos invasiva y, por lo tanto, más común, pero tiene un mayor tiempo de procesamiento y requiere la participación del usuario. Dado que el proceso de rotoscopia es actualmente semimanual, sigue siendo necesario formar de forma fiable a los operarios en el software específico del laboratorio, ya que los errores de raíz cuadrada media (RMS) entre operadores pueden oscilar entre 0,83 mm y 4,96 mm, y entre 0,58° y 10,29° a lo largo de un solo eje o alrededorde él 1. Además, los algoritmos de coincidencia de modelos están mejorando, pero requieren validación utilizando paradigmas experimentales que estén lo más cerca posible de las condiciones in vivo.
La precisión de las estimaciones de pose basadas en modelos a menudo se evalúa en función de métricas basadas en marcadores. Por ejemplo, los pies cadavéricos humanos implantados con marcadores se han movido a través de posiciones locomotoras simuladas 13,14,16. A continuación, las imágenes BVR capturadas se introducen en el método de rotoscopia basado en modelos y se comparan con las métricas basadas en marcadores para determinar su exactitud (sesgo y precisión). Si bien el uso de un pie de cadáver estático es un enfoque valioso, tiene limitaciones para evaluar la verdadera precisión de la postura ósea in vivo. Por ejemplo, las posiciones articulares son relativamente constantes en un pie de cadáver con ausencia de actividad muscular y cargas in vivo. Por lo tanto, puede que no represente los límites del movimiento articular en diversas tareas locomotoras. Las variaciones en la postura articular modifican la oclusión en las imágenes BVR, lo que es una fuente de error de medición cuando se estiman posturas óseas del pie pequeñas y densamente compactas13. Además, cuando se utilizan algoritmos de coincidencia de imágenes, la presencia de marcadores en las imágenes BVR probablemente sesgaría los resultados. Si bien los grupos han eliminado los marcadores de las imágenes de tomografía computarizada (TC) digital y comunicaciones en medicina (DICOM) 9,14,16, solo ocasionalmente también se eliminan de las imágenes de videorradiografía biplanar16.
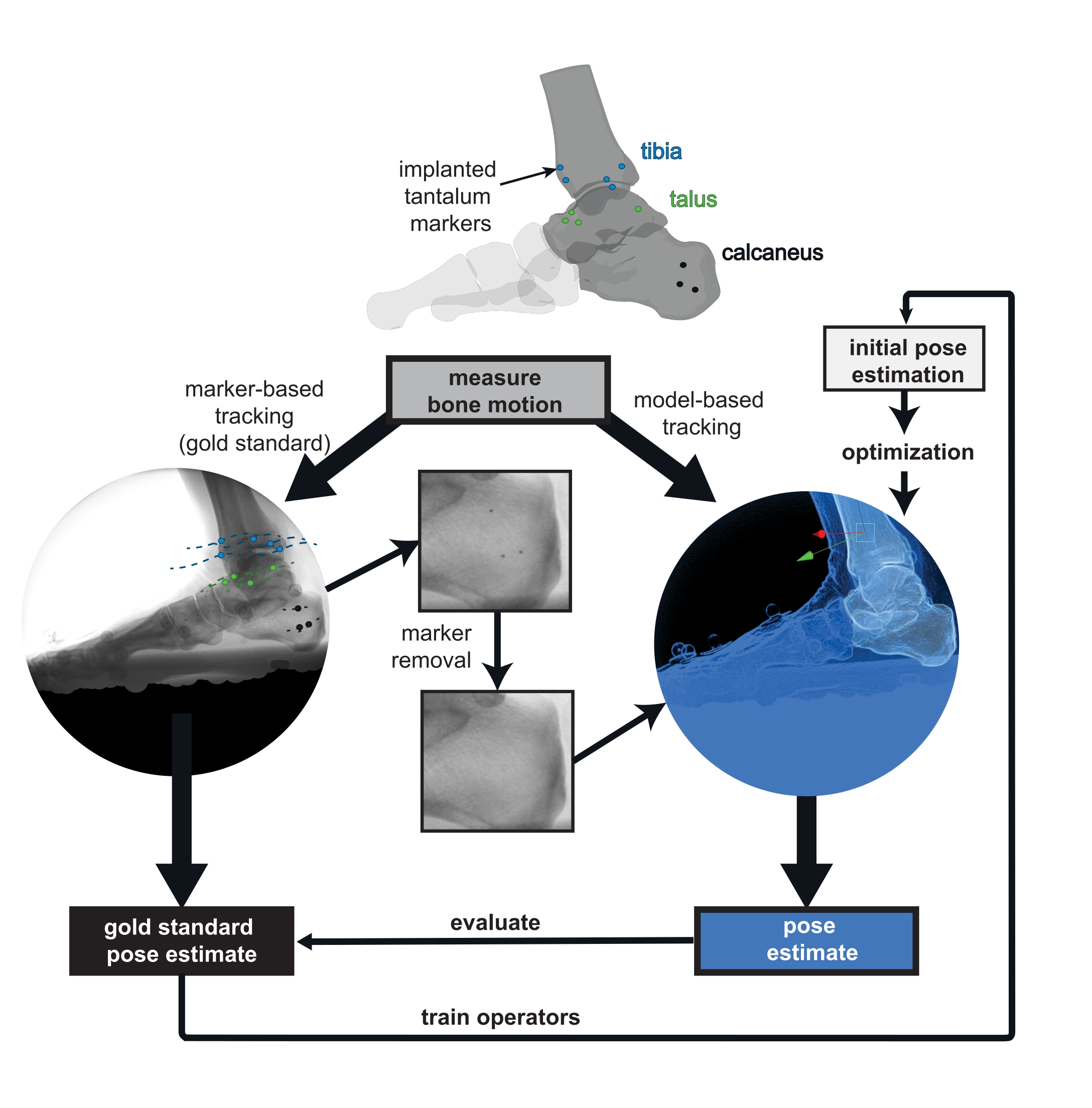
Este trabajo presenta un conjunto de datos BVR de código abierto de un participante saltando y corriendo in vivo, que tiene marcadores implantados en los huesos del pie y el tobillo (Figura 1). Se proporciona una estimación de la postura basada en marcadores para el movimiento óseo in vivo de la tibia, el astrágalo y el calcáneo. Los marcadores se eliminaron de las imágenes de rayos X y TC para limitar cualquier sesgo introducido durante la evaluación de la precisión del seguimiento basado en modelos. Este conjunto de datos está destinado a evaluar la precisión de cualquier software de estimación de poses basado en modelos y a mejorar la selección de estimaciones de poses iniciales para procesos semimanuales. Es más apropiado para las personas que tienen como objetivo mejorar la velocidad y la precisión de la línea de procesamiento de imágenes BVR, y para los laboratorios que desean una baja variabilidad entre operadores en la estimación inicial de la pose.

Figura 1: Descripción general del conjunto de datos de videorradiografía biplanar (BVR) proporcionado. Los marcadores implantados se rastrean in vivo como el estándar de oro para la estimación de la posición ósea. Los marcadores se eliminaron digitalmente de las imágenes BVR y de las tomografías computarizadas para evitar sesgos en el seguimiento basado en modelos. Las poses estimadas a partir de cualquier software de seguimiento basado en modelos se pueden comparar con el estándar de oro del seguimiento basado en marcadores. La estimación de la posición basada en marcadores también se puede utilizar para entrenar a nuevos operadores para mejorar su estimación inicial de la posición ósea para el seguimiento basado en modelos. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Protocolo
Los protocolos experimentales fueron aprobados por la Junta de Ética de Investigación de Ciencias de la Salud y Hospitales Docentes Afiliados de la Universidad de Queen's. El participante dio su consentimiento informado antes de participar en la recolección de datos.
1. Preparación del paciente y generación de conjuntos de datos
NOTA: El participante (varón, 49 años, 83 kg, 1,75 m de altura) tenía varios marcadores de tantalio de 0,8 mm de diámetro previamente implantados en el calcáneo (3 marcadores), astrágalo (4 marcadores) y tibia (5 marcadores; Figura 1).
- Adquiera una tomografía computarizada con un algoritmo de reducción de artefactos metálicos (para reducir la distorsión de la imagen debido a los implantes metálicos) en el pie del participante en una postura de tobillo con flexión plantar máxima con un tamaño de píxel de 0,500 mm o menos, y un grosor de corte de 0,625 mm o menos.
NOTA: Aquí, el pie derecho del participante se escaneó con una resolución de 0,441 mm x 0,441 mm x 0,625 mm. Las ubicaciones de los marcadores no se colocan en ubicaciones anatómicas específicas dentro del hueso4; en cambio, se distribuyen por todo el hueso5. - Para conocer los métodos de recogida de videorradiografías biplanares y el procesamiento detallado de los datos, véase17. Brevemente, pida al participante que complete el movimiento deseado, con su posición inicial seleccionada de tal manera que su pie aterrice en el volumen de la videorradiografía biplanar. Utilice un objeto de calibración y rejillas de no distorsión para localizar las cámaras y desdistorsionar las imágenes, respectivamente18.
NOTA: El participante en este estudio completó pruebas de dos movimientos diferentes. Saltaron a un metrónomo a 108 bpm y trotaron lentamente a través del volumen. Las imágenes se capturaron de forma continua a 250 Hz con una velocidad de obturación de 1111 μs, y el sistema de rayos X se ajustó a 70 kV y 100 mA. - Segmente individualmente los marcadores utilizando el software de procesamiento de imágenes médicas en 3D. Con el algoritmo de relleno según el contenido del editor de gráficos ráster y las ubicaciones de marcadores conocidas, elimine los marcadores de las imágenes DICOM. Cree los volúmenes parciales de hueso y las mallas teseladas mediante la segmentación de las imágenes sin marcadores, como se muestra en lafigura 17. Alinee tanto los volúmenes parciales como las mallas y guárdelos en el espacio CT.
- Para cada fotograma, tabule las coordenadas de la imagen x-y sin filtrar de cada marcador en XMALab y expórtelo18. Triangule las coordenadas 3D utilizando la caja de herramientas de visión artificial de MATLAB. Estime la posición haciendo coincidir las posiciones de los marcadores 3D en el espacio de rayos X con los centroides de ajuste esférico en el espacio CT utilizando un enfoque de mínimos cuadrados19. Utilice el mismo algoritmo en el editor de gráficos rasterizados para eliminar los marcadores de las imágenes de rayos X y prepararlos para el seguimiento.
2. Acceder al conjunto de datos y al código
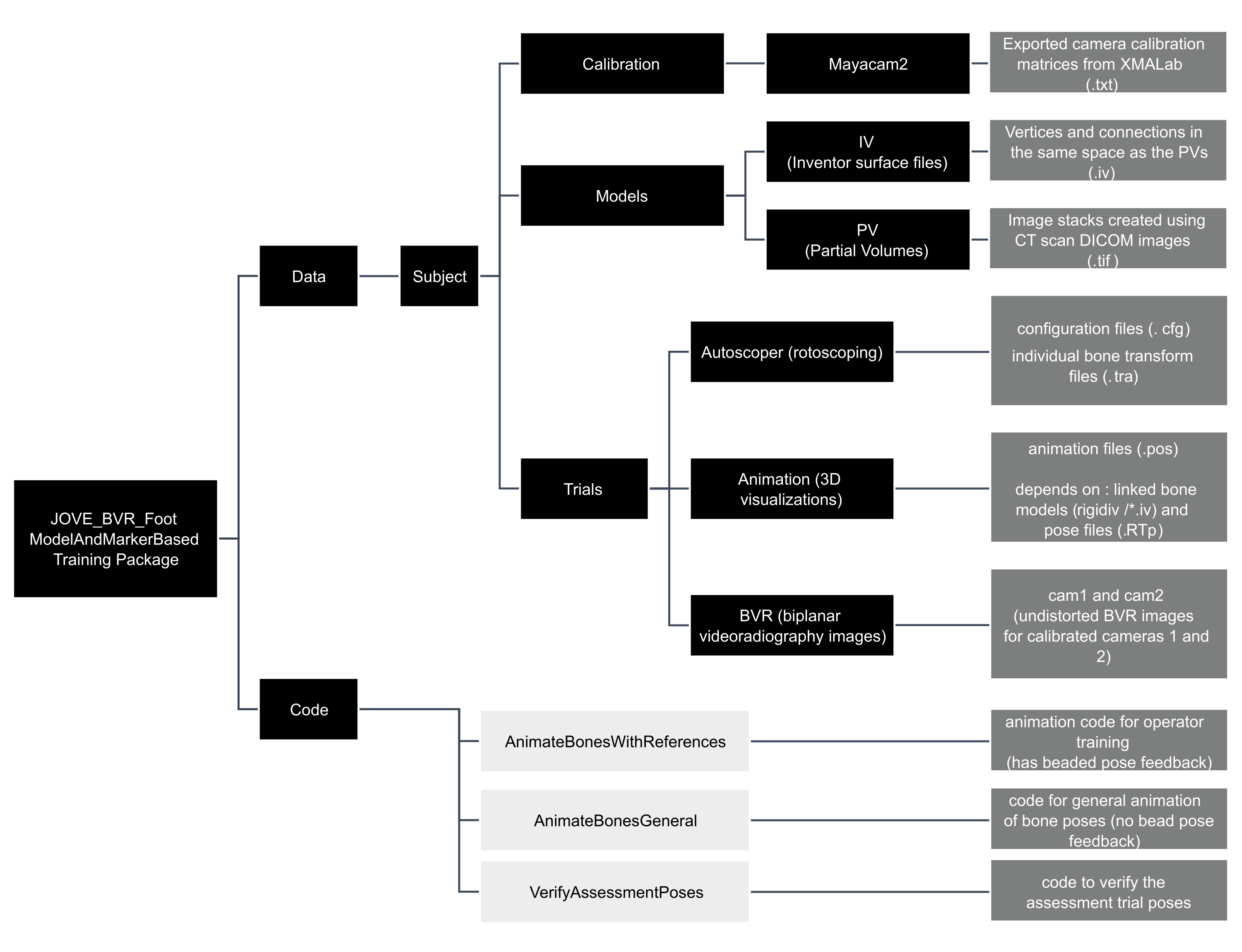
- Descargue el conjunto de datos desde aquí. Hay imágenes BVR y archivos de calibración para cada ensayo, así como estimaciones de poses de referencia guardadas en el formato .tra (Figura 2). Descargue/clone el paquete de código desde: https://github.com/skelobslab/JOVE_BVR_FootModelAndMarkerBased.

Figura 2: Árbol de datos del paquete de formación JOVE_BVR_Foot_ModelAndMarkerBased. Las carpetas se muestran en cuadros negros, el código se muestra en cuadros grises claros y las descripciones de los archivos se encuentran en cuadros grises oscuros. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
3. Evaluar la precisión del algoritmo de seguimiento de modelos
- Guarde las estimaciones de pose como un archivo .tra en la carpeta de referencia de la prueba. Organice el archivo .tra con la pose del espacio óseo al espacio de rayos X escrita en un formato de 1 fila x 16 columnas, con cada fila correspondiente al marco y la matriz de pose de 4 x 4 escrita como [primera columna, segunda columna, tercera columna y cuarta columna].
NOTA: El espacio óseo es sinónimo de espacio CT en este conjunto de datos. - Para comprobar las estimaciones de posición, abra el script verifyAssessmentPoses.m en la plataforma informática y, a continuación, haga clic en Ejecutar. Cargue los archivos tal y como se describe en las solicitudes. El script calculará el eje helicoidal entre la estimación de posición basada en modelos y marcadores y devolverá una diferencia de rotación y traslación para cada fotograma de datos rastreados.
4. Formación de nuevos operadores
NOTA: Esta sección describe la capacitación con comentarios para un nuevo operador. En este caso, Autoscoper es el software de estimación de poses basado en modelos seleccionado, pero se podría utilizar otro software como sustituto.
- Descargue la última versión del software de estimación de poses desde: https://simtk.org/projects/autoscoper.
- Para localizar archivos BVR locales, abra el archivo en un editor de texto (.\JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\POINTER_T0019_jog001.cfg). El software utiliza un archivo de puntero (.cfg) para localizar los archivos. Modifique los directorios para que conduzcan a los archivos locales adecuados. Guarde el archivo y ciérrelo.
- Para cargar las imágenes BVR y la información de la cámara, abra el software de estimación de poses y haga clic en Cargar prueba. Vaya al archivo de configuración del puntero guardado en el paso anterior y haga clic en Abrir.
- Para realizar un seguimiento, siga el protocolo de Akhbari et al17 (seguimiento basado en modelos). En resumen, gire y traslade el hueso haciendo clic y arrastrando los ejes sobre el hueso hasta que esté satisfecho con la posición y orientación del calcáneo. Presione la tecla S en el teclado para guardar el fotograma actual para el calcáneo (cal).
NOTA: La configuración del filtro se incluye en \JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\ que se puede utilizar para filtrar como se muestra en Akhbari et al17. - Para guardar los archivos, haga clic en Guardar seguimiento. Guarde el archivo como [Número de prueba]_[Número de asunto]_[Nombre de la prueba]_[Código óseo de 3 letras].tra (por ejemplo, T0019_SOL001A_jog0001_cal.tra) en el directorio deseado. Exporte la configuración como actual, matriz, columna, coma, ninguno, mm, grados.
NOTA: Los códigos óseos de tres letras para la tibia y el astrágalo son tib y tal, respectivamente. - Para crear archivos para realizar un seguimiento de la precisión, abra la plataforma informática y ejecute el script animateBonesWithReferences.m en la carpeta de código. Desplácese a las carpetas del paquete de formación según lo solicitado por los cuadros de diálogo.
NOTA: El código animateBonesWithReferences.m es un código especializado para el entrenamiento que proporciona las poses de los datos basados en marcadores como retroalimentación para mejorar el seguimiento del nuevo operador. - Instale el software de visualización desde: https://github.com/DavidLaidlaw/WristVisualizer/tree/master. Para visualizar el seguimiento, abra el archivo .pos creado en el paso 4.6 en el software de visualización; La ubicación de su archivo estará en la ventana de comandos de la plataforma informática.
- Verifique la alineación del hueso rastreado (gris) con el hueso de referencia. El color verde indica que la pose está dentro de los umbrales de rotación y traducción, mientras que el rojo indica que está fuera del umbral. Continúe rastreando y visualizando hasta que todos los fotogramas estén en verde. Cambie los umbrales (phi - rotación, trans - traducción) en las líneas 10 y 11 del script animateBonesWithReferences.m, si es necesario.
NOTA: Si el hueso de referencia es rojo (Figura 3A), significa que la postura está a más de 1 mm o 2° de distancia de la postura basada en marcadores, medida mediante el eje helicoidal. Si es verde, y visualmente es razonable, ese fotograma se rastrea lo suficientemente bien (Figura 3B). - Para rastrear los otros huesos del complejo del tobillo, repita los pasos 4.4 a 4.8 para el astrágalo y la tibia. Utilice el software de visualización para asegurarse de que los huesos no colisionen.
- Para completar la evaluación, realice un seguimiento y visualice la tibia, el astrágalo y el calcáneo en el ensayo llamado ensayo de evaluación.
- Abra la plataforma informática y ejecute el código animateBonesGeneral.m. Desplácese a las carpetas del paquete de formación según lo solicitado por los cuadros de diálogo. Verifique las posturas óseas utilizando el archivo .pos en el software de visualización. Este código es generalizable a otros ensayos para la visualización 3D de los huesos.
NOTA: La pose verdadera basada en marcadores ya no estará disponible. Solo estarán presentes los huesos grises.
- Abra la plataforma informática y ejecute el código animateBonesGeneral.m. Desplácese a las carpetas del paquete de formación según lo solicitado por los cuadros de diálogo. Verifique las posturas óseas utilizando el archivo .pos en el software de visualización. Este código es generalizable a otros ensayos para la visualización 3D de los huesos.
- Para evaluar las estimaciones de posición, abra el script verifyAssessmentPoses.m en la plataforma informática y haga clic en Ejecutar. El script calculará el eje helicoidal entre la estimación de posición basada en modelos y marcadores y devolverá una diferencia de rotación y traslación para cada fotograma de datos rastreados. Esto producirá el mismo gráfico que en animateBoneswithReferences.m, pero no producirá una animación.
- Compruebe que todos los puntos de datos estén por debajo del umbral seleccionado (línea plana) tanto para la rotación como para la traslación. Guarde los resultados en un archivo .csv, si es necesario.

Figura 3: Visualización del seguimiento aceptable e inaceptable. (A) Hueso del calcáneo rastreado utilizando el seguimiento basado en modelos (gris; también indicado por la flecha gris) que no coincide suficientemente con la posición de la estimación de la posición basada en marcadores (rojo; también indicado por la flecha roja). (B) Calcáneo que coincida suficientemente con la postura de la estimación de la postura basada en marcadores. Como resultado, el calcáneo rastreado por el marcador se muestra en verde (también indicado por las flechas gris y verde). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Resultados
Dos nuevos operadores y un experto completaron la capacitación basada en modelos. Los 41 fotogramas de la prueba de evaluación midieron la competencia de su seguimiento basado en modelos (Figura 4). Las estimaciones de las posturas de los operadores solían estar muy por debajo de los umbrales establecidos. El sesgo medio de la mediana (rango) en la rotación a través de los huesos fue de 0,75° (0,69° a 0,85°) para el calcáneo, 0,40° (0,37° a 0,46°) para el astrágalo y 0,89° (0,76° a 1,07°) para la tibia. La mediana del sesgo de traslación fue de 0,10 mm (0,05 mm a 0,16 mm) para el calcáneo, de 0,31 mm (0,22 mm a 0,41 mm) para el astrágalo y de 0,33 mm (0,27 mm a 0,37 mm) para la tibia. Estos resultados sugieren que el tutorial es eficaz para entrenar a los operadores dentro de una tolerancia establecida.

Figura 4: Sesgo de rotación y traslación para nuevos operadores y un experto. Los gráficosde violín 20 muestran un sesgo en la rotación (A) (C) (E) y la traducción (B) (D) (F) entre las estimaciones de posición basadas en modelos y en marcadores para dos nuevos operadores y un experto para el calcáneo (A) (B), el astrágalo (C) (D) y la tibia (E) (F). Los 41 fotogramas de la prueba de evaluación se muestran como puntos de datos, con la mediana (círculo blanco), el rango intercuartílico (línea vertical gruesa) y la media (línea horizontal gruesa). La línea negra a 2° y 1 mm representa los umbrales seleccionados. No se muestran seis fotogramas fuera del umbral para el nuevo operador 2 en (E). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
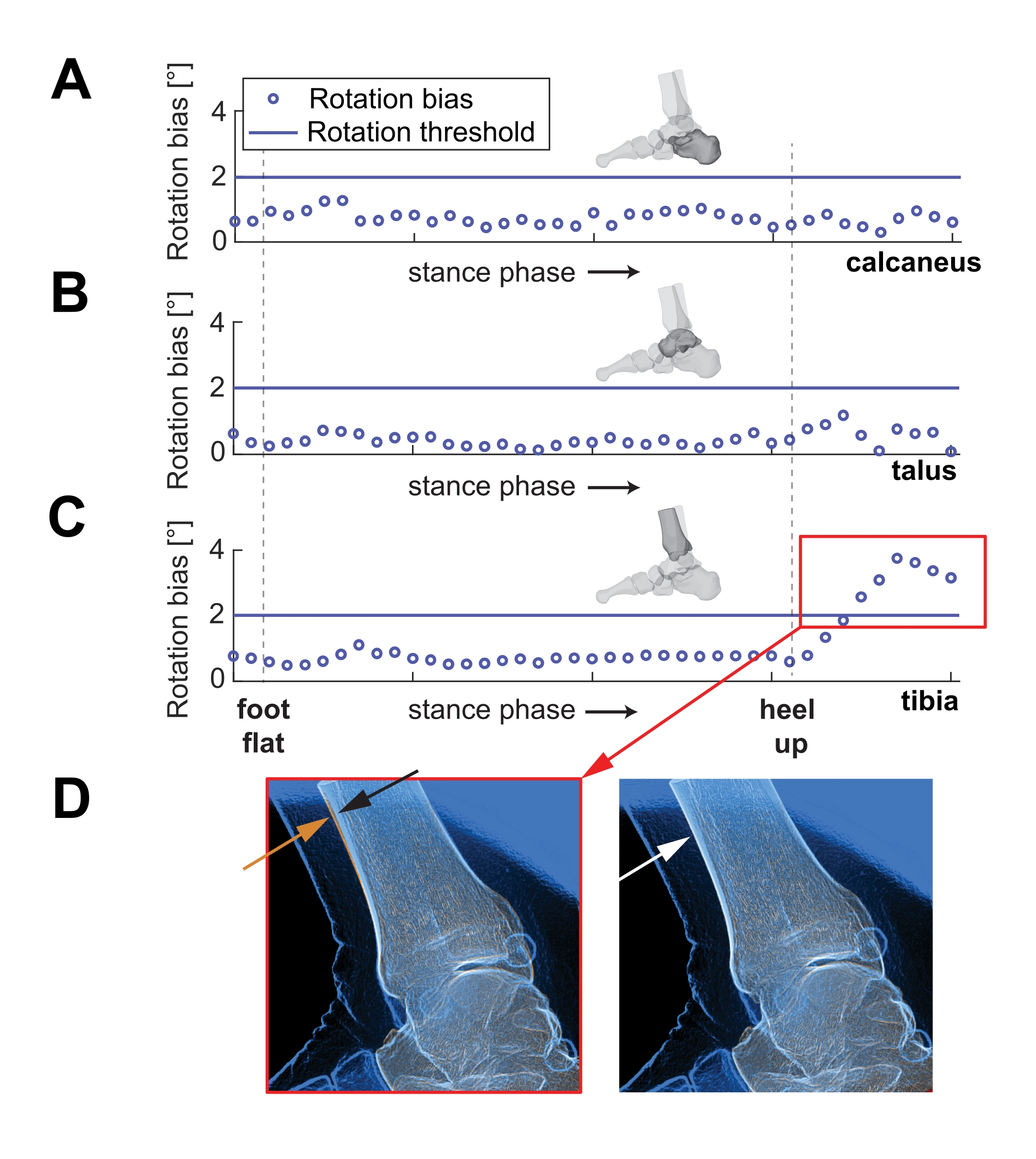
Un nuevo operador tenía seis bastidores por encima del umbral de rotación de 2° en su seguimiento de tibia. Los fotogramas se identificaron mediante uno de los gráficos generados en verifyAssessmentPoses.m (figura 5). Estos seis fotogramas son más difíciles de rastrear debido a la oclusión de la tibia por el otro pie que se balancea a través de la vista.

Figura 5: Sesgo de rotación para cada fase de fotograma sobre la postura. Ejemplo del seguimiento de la rotación del segundo operador nuevo sobre parte de la fase de apoyo de la carrera, para (A) el calcáneo, (B) el astrágalo y (C) la tibia. Tenga en cuenta que el cuadro rojo en (C) muestra los fotogramas con errores altos. (D) A la izquierda, una imagen representativa muestra la diferencia aproximada en la alineación de las líneas naranja y azul de la tibia anterior (indicadas por flechas naranjas y negras). La imagen de la derecha muestra un ejemplo de una tibia bien rastreada (indicada por la flecha blanca). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Archivo Complementario. Haga clic aquí para descargar este archivo.
Discusión
La estimación precisa de la postura basada en modelos es fundamental para medir la artrocinemática y el movimiento esquelético. Los métodos de validación previos para la estimación de la pose se han basado en especímenes cadavéricos con marcadores implantados, sin carga in vivo y rangos de movimiento articular. Este conjunto de datos in vivo de correr y saltar con estimación de pose basada en marcadores permite la validación de algoritmos basados en modelos. Además, el conjunto de datos se organiza para entrenar a nuevos operadores, de modo que la estimación inicial requerida para la mayoría de los algoritmos basados en modelos esté dentro de una tolerancia establecida, lo que reduce la variabilidad entre operadores. El código de MATLAB se proporciona de manera que los huesos se puedan animar y se genere automáticamente una retroalimentación sobre la calidad de la pose.
Los nuevos operadores fueron entrenados con éxito dentro de una tolerancia establecida de 2° de rotación y 1 mm de traslación. Estos límites son mucho más bajos que la fiabilidad entre operadores informada, que puede ser tan grande como 5 mm y 10°1. Sin embargo, las tolerancias seleccionadas son de 2 a 4 veces más altas que el error RMS de otros experimentos con pie cadavérico intacto (0,59 mm y 0,71°16). Las tolerancias incluyen los rangos de gama alta de error RMS, pero aún representan una mejora sustancial con respecto a la variabilidad entre operadores informada. Además, las condiciones in vivo son más difíciles de rastrear que las posturas estáticas del pie debido a la variación en la oclusión de huesos, tejidos blandos y artefactos de movimiento a alta velocidad a través del volumen de rayos X. Los nuevos operadores rotoscopiaron con éxito los ensayos dentro de la tolerancia y estuvieron cerca de los resultados del experto, a excepción de los seis fotogramas que se muestran en la Figura 5C. Por lo tanto, la tolerancia establecida representa una mejora con respecto a la variabilidad entre operadores informada, y los resultados muestran que este método puede entrenar con éxito nuevos operadores dentro de esa tolerancia.
Un paso crítico en este protocolo es la iteración entre la rotoscopia en el software seleccionado y la visualización en 3D. Esta iteración es importante para comprender cómo se orientan los huesos en el espacio. Permite al operador verificar si las posturas óseas son biológicamente factibles y no chocan con otros huesos. La alternancia continua entre la rotoscopia y la visualización mejora la calidad de las estimaciones finales de la posición ósea y ayuda a detectar errores de optimización.
El conjunto de entrenamiento, en particular la prueba de evaluación, incluye escenarios de seguimiento desafiantes para superar los límites de los nuevos operadores. La posición de las fuentes de rayos X y los intensificadores de imagen en esta colección hizo que el pie oscilante ocluyera las vistas, lo que creó desafíos para alinear los modelos óseos. El nuevo operador, con varios fotogramas por encima del umbral de rotación, se vio afectado por el pie contralateral que oscurecía la vista. Estrategias como cambiar la configuración del filtro y rotoscopiar los fotogramas inmediatamente antes y después de la oclusión pueden ayudar a mitigar estos problemas. Además, la orientación de los sistemas de coordenadas difiere lo suficiente entre los DICOM y el software de estimación de pose, lo que provoca un cambio de ángulo en la tibia. Los operadores deben realizar un seguimiento de cada fotograma en este punto para superar este desafío. Estos escenarios no son infrecuentes en las recopilaciones de datos y representan desafíos que la estimación automática de poses basada en modelos debería sortear en el futuro y, por lo tanto, son una valiosa adición a este conjunto de datos.
Existen ciertas limitaciones con este protocolo. En primer lugar, declarar la estimación de la pose basada en marcadores como el estándar de oro es polémico, ya que la diferencia de precisión entre la estimación de la pose basada en marcadores y modelos no suele ser un orden de magnitud diferente 2,3,10. Sin embargo, es probable que los cambios visuales en las imágenes BVR que surgen con las colecciones in vivo (es decir, artefactos de movimiento, tejidos blandos y oclusión ósea) inducan más errores en la estimación de la pose basada en modelos en comparación con los métodos basados en marcadores. Se requiere más experimentación para confirmar esta hipótesis. Además, este conjunto de datos no captura todas las colecciones de rayos X biplanares. La orientación de las cámaras, de modo que los huesos estén en diferentes posiciones relativas, podría cambiar la prominencia de las características óseas y, en consecuencia, afectar la función de costo del algoritmo de coincidencia de poses. Además, estas características pueden verse afectadas por la configuración del filtro de imagen15,17. Por lo tanto, este conjunto de datos no es necesariamente una evaluación generalizable de la precisión de BVR. En cambio, es una herramienta para entrenar a los usuarios para que ingresen estimaciones de pose iniciales apropiadas y para mejorar los algoritmos de estimación de pose basados en modelos hasta que ya no sean necesarias las conjeturas iniciales rotoscópicas manualmente.
Divulgaciones
Los autores no tienen conflictos de intereses que revelar.
Agradecimientos
Este trabajo fue financiado por la NSERC Discovery Grant (RGPIN/04688-2015) y el Ontario Early Researcher Award.
Materiales
| Name | Company | Catalog Number | Comments |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper; pose estimation software | |
| Code | Queen's University | https://github.com/skelobslab/JOVE_BVR_FootModelAndMarker Based | |
| Content-Aware Fill algorithm, Photoshop | Adobe | ||
| Dataset | Queen's University | Download here | |
| MATLAB | Mathworks | n/a | computing platform |
| Mimics | Materialise, Belgium | 3D image processing software | |
| Revolution HD | General Electric Medical Systems | CT scan device used | |
| WristVisualizer | Brown University | https://github.com/DavidLaidlaw/WristVisualizer/tree/master; Visualization software | |
| XMALab | Brown University | https://bitbucket.org/xromm/xmalab/src/master/ |
Referencias
- Maharaj, J. N., et al. The reliability of foot and ankle bone and joint kinematics measured with biplanar videoradiography and manual scientific rotoscoping. Frontiers in Bioengineering and Biotechnology. 8 (106), (2020).
- Iaquinto, J. M., et al. Model-based tracking of the bones of the foot: A biplane fluoroscopy validation study. Computers in Biology and Medicine. 92, 118-127 (2018).
- Miranda, D. L., et al. Static and dynamic error of a biplanar videoradiography system using marker-based and markerless tracking techniques. Journal of Biomechanical Engineering. 133 (12), 121002(2011).
- Tashman, S., Anderst, W. In-vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of Experimental Zoology Part A: Ecological Genetics and Physiology. 313 (5), 262-279 (2010).
- Challis, J. H. A procedure for determining rigid body transformation parameters. Journal of Biomechanics. 28 (6), 733-737 (1995).
- Lundberg, A., Goldie, I., Kalin, B. O., Selvik, G. Kinematics of the ankle/foot complex: plantarflexion and dorsiflexion. Foot & ankle. 9 (4), 194-200 (1989).
- You, B. -M., Siy, P., Anderst, W., Tashman, S. In vivo measurement of 3-D skeletal kinematics from sequences of biplane radiographs: Application to knee kinematics. IEEE Transactions on Medical Imaging. 20 (6), 514-525 (2001).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a new model-based tracking technique for measuring three-dimensional, in vivo glenohumeral joint kinematics. Journal of Biomechanical Engineering. 128 (4), 604-609 (2006).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of three-dimensional model-based tibio-femoral tracking during running. Medical Engineering & Physics. 31 (1), 10-16 (2009).
- Martin, D. E., et al. Model-based tracking of the hip: implications for novel analyses of hip pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Massimini, D. F. Non-invasive determination of coupled motion of the scapula and humerus-An in-vitro validation. Journal of Biomechanics. 44 (3), 408-412 (2011).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8 (1), 1-10 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Cross, J. A., et al. Biplane fluoroscopy for hindfoot motion analysis during gait: A model-based evaluation. Medical Engineering & Physics. 43, 118-123 (2017).
- Akhbari, B., Morton, A. M., Moore, D. C., Crisco, J. J. Biplanar videoradiography to study the wrist and distal radioulnar joints. JoVE Journal of Visualized Experiments. (168), e62102(2021).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM). Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Söderkvist, I., Wedin, P. -Å Determining the movements of the skeleton using well-configured markers. Journal of Biomechanics. 26 (12), 1473-1477 (1993).
- Bechtold, B. Violin Plots for Matlab. , Available from: https://github.com/bastibe/Violinplot-Matlab (2021).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoExplorar más artículos
This article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados