
Method Article
Set di dati di videoradiografia biplanare per lo sviluppo di stimazioni di posa basate su modelli e la formazione di nuovi utenti
In questo articolo
Riepilogo
Questo lavoro presenta un set di dati in vivo con pose ossee stimate con metodi basati su marcatori. Qui è incluso un metodo per formare gli operatori a migliorare le loro stime iniziali per la stima della posa basata su modelli e ridurre la variabilità tra operatori.
Abstract
Misurare il movimento delle piccole ossa del piede è fondamentale per comprendere la perdita patologica di funzione. La videoradiografia biplanare è adatta per misurare il movimento osseo in vivo , ma sorgono sfide quando si stima la rotazione e la traslazione (posa) di ciascun osso. La posa dell'osso è tipicamente stimata con metodi basati su marcatori o modelli. I metodi basati su marcatori sono altamente accurati ma rari in vivo a causa della loro invasività. I metodi basati su modelli sono più comuni, ma attualmente sono meno accurati in quanto si basano sull'input dell'utente e su algoritmi specifici del laboratorio. Questo lavoro presenta un raro set di dati in vivo delle pose del calcagno, dell'astragalo e della tibia, misurati con metodi basati su marcatori durante la corsa e il salto. È incluso un metodo per addestrare gli utenti a migliorare le loro ipotesi iniziali in un software di stima della posa basato su modelli, utilizzando un feedback visivo basato su marcatori. Nuovi operatori sono stati in grado di stimare le pose ossee entro 2° di rotazione e 1 mm di traslazione della posa basata su marcatore, in modo simile a un utente esperto del software basato su modelli, e rappresentando un miglioramento sostanziale rispetto alla variabilità inter-operatore precedentemente riportata. Inoltre, questo set di dati può essere utilizzato per convalidare altri software di stima della posa basati su modelli. In definitiva, la condivisione di questo set di dati migliorerà la velocità e l'accuratezza con cui gli utenti possono misurare le pose ossee dalla videoradiografia biplanare.
Introduzione
Misurare il movimento delle piccole ossa del piede è fondamentale per comprendere la perdita patologica di funzione. Tuttavia, la misurazione dinamica del movimento osseo del piede è impegnativa a causa delle dimensioni ridotte e della configurazione densamente compatta delle ossa e delle articolazioni 1,2. La tecnologia della videoradiografia biplanare (BVR) è adatta per misurare il movimento tridimensionale (3D) in vivo delle piccole ossa del piede e della caviglia durante le attività dinamiche. BVR fornisce informazioni sull'artrocinematica utilizzando due sorgenti di raggi X accoppiate a intensificatori di immagine, che convertono i raggi X del movimento dinamico in luce visibile. Mentre il piede si muove attraverso il volume di acquisizione, le telecamere ad alta velocità catturano le immagini. Le immagini non sono distorte e vengono proiettate nel volume di acquisizione utilizzando le posizioni calibrate della fotocamera 3,4. I sei gradi di libertà (6 d.o.f.) di posa ossea (3 d.o.f. per la posizione e 3 d.o.f. per l'orientamento) vengono quindi stimati utilizzando metodi basati su marcatori o basati su modelli3.
I metodi di stima della posa basati su marcatori o modelli variano tra laboratori e discipline. Il gold standard della misurazione dinamica della posa BVR è l'impianto di piccoli marcatori di tantalio nell'osso di interesse 4,5. Per stimare la posa è necessario un minimo di tre marcatori per osso, con marcatori aggiuntivi che portano a una maggiore precisione 5,6. Questo metodo è meno comune in vivo a causa della sua invasività, in quanto richiede l'impianto chirurgico e i marcatori vengono quindi incorporati in modo permanente nell'osso7. In alternativa, il tracciamento basato su modelli utilizza informazioni volumetriche provenienti da altre modalità di imaging, come la tomografia computerizzata (TC) o la risonanza magnetica, per ricreare il modello sulle immagini BVR 2,3,8,9,10,11,12,13,14,15 . Il modello viene quindi manipolato semi-manualmente per corrispondere al meglio alle immagini (rotoscoping), in genere utilizzando una combinazione di input dell'utente come stima iniziale e ottimizzazione cross-correlativa 3,8,9,10,15. La stima della posa basata su modelli è meno invasiva e quindi più comune, ma ha un tempo di elaborazione maggiore e richiede l'input dell'utente. Poiché il processo di rotoscoping è attualmente semi-manuale, rimane la necessità di formare in modo affidabile gli operatori nel software specifico del laboratorio, poiché gli errori RMS (Root Mean Square) inter-operatore possono variare da 0,83 mm a 4,96 mm e da 0,58° a 10,29° lungo o intorno a un singolo asse1. Inoltre, gli algoritmi di corrispondenza dei modelli stanno migliorando, ma richiedono una convalida utilizzando paradigmi sperimentali che siano il più vicino possibile alle condizioni in vivo.
L'accuratezza delle stime delle pose basate su modelli viene spesso valutata rispetto a metriche basate su marcatori. Ad esempio, i piedi cadaverici umani impiantati con marcatori sono stati spostati attraverso posizioni locomotorie simulate 13,14,16. Le immagini BVR acquisite vengono quindi inviate al metodo di rotoscoping basato su modelli e confrontate con le metriche basate su marcatori per verificarne l'accuratezza (bias e precisione). Sebbene l'uso di un piede statico da cadavere sia un approccio valido, presenta dei limiti nella valutazione della vera accuratezza della posa ossea in vivo. Ad esempio, le posizioni articolari sono relativamente costanti in un piede da cadavere con l'assenza di attività muscolare e carichi in vivo. Pertanto, potrebbe non rappresentare i limiti del movimento articolare in diversi compiti locomotori. Le variazioni nella postura articolare modificano l'occlusione nelle immagini BVR, che è una fonte di errore di misurazione quando si stimano le pose dell'osso del piede piccolo e densamente compattato13. Inoltre, quando si utilizzano algoritmi di corrispondenza delle immagini, la presenza di marcatori nelle immagini BVR probabilmente distorcerebbe i risultati. Mentre i gruppi hanno rimosso i marcatori dalle immagini DICOM (Compm) 9,14,16 (tomografia computerizzata) (Digital Imaging and Communications in Medicine) 9,14,16, solo occasionalmente vengono rimossi anche dalle immagini videoradiografiche biplanari16.
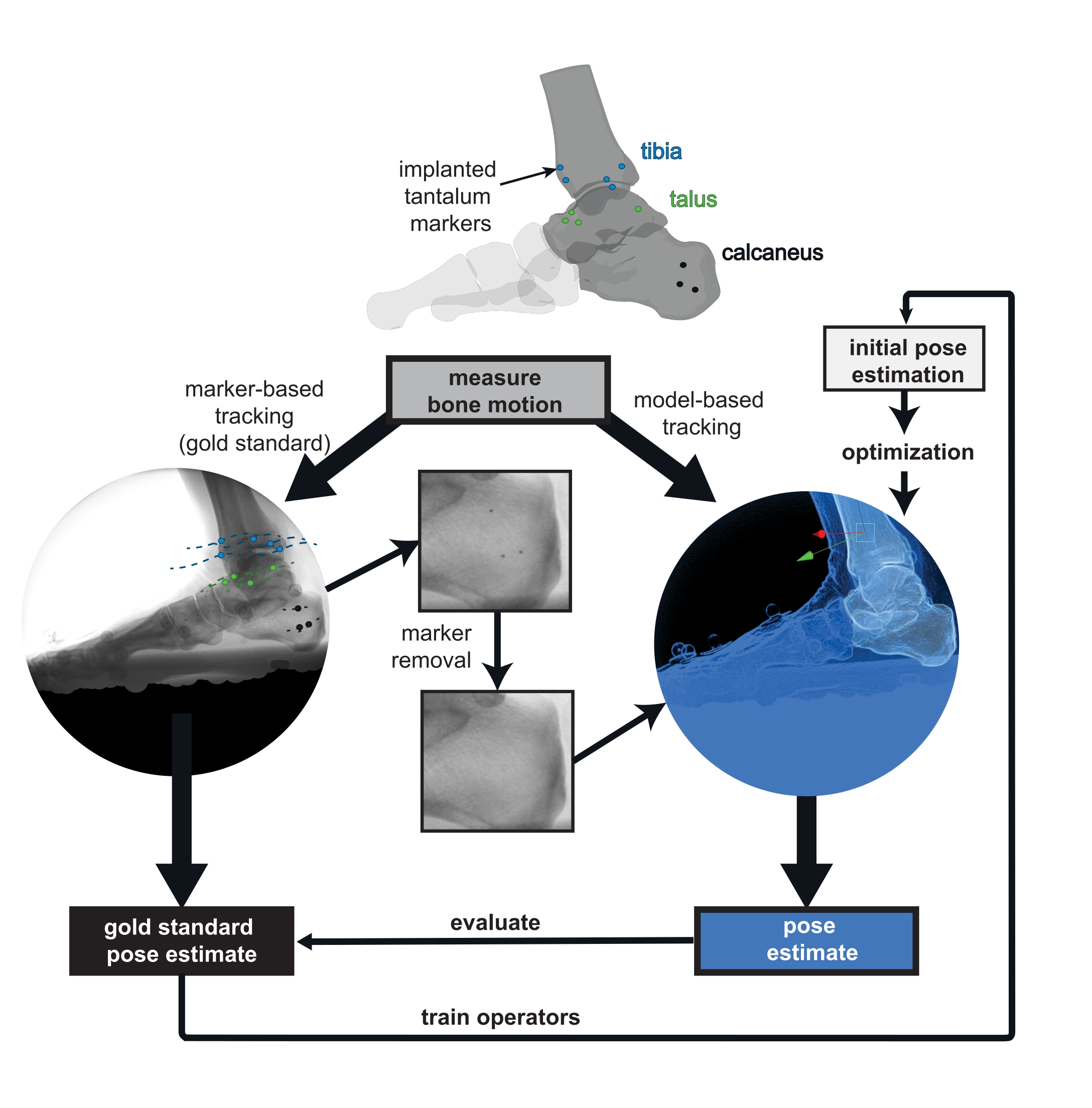
Questo lavoro presenta un set di dati BVR open source di un partecipante che salta e corre in vivo, a cui sono stati impiantati dei marcatori nelle ossa del piede e della caviglia (Figura 1). Viene fornita una stima della posa basata su marcatori per il movimento osseo in vivo della tibia, dell'astragalo e del calcagno. I marcatori sono stati rimossi sia dalle immagini a raggi X che da quelle TC per limitare eventuali distorsioni introdotte durante la valutazione dell'accuratezza del tracciamento basata sul modello. Questo set di dati ha lo scopo di valutare l'accuratezza di qualsiasi software di stima della posa basato su modelli e di migliorare la selezione delle stime iniziali della posa per i processi semi-manuali. È più appropriato per gli individui che mirano a migliorare la velocità e l'accuratezza della pipeline di elaborazione delle immagini BVR e per i laboratori che desiderano una bassa variabilità inter-operatore nella stima della posa iniziale.

Figura 1: Panoramica del set di dati di videoradiografia biplanare (BVR) fornito. I marcatori impiantati sono tracciati in vivo come gold standard per la stima della posa ossea. I marcatori sono stati rimossi digitalmente dalle immagini BVR e dalle scansioni di tomografia computerizzata per evitare distorsioni nel tracciamento basato sul modello. Le pose stimate da qualsiasi software di tracciamento basato su modelli possono essere confrontate con il gold standard del tracciamento basato su marcatori. La stima della posa basata su marcatori può essere utilizzata anche per addestrare nuovi operatori a migliorare la stima iniziale della posa ossea per il tracciamento basato su modelli. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
Protocollo
I protocolli sperimentali sono stati approvati dalla Queen's University Health Sciences e dall'Affiliated Teaching Hospitals Research Ethics Board. Il partecipante ha dato il consenso informato prima di partecipare alla raccolta dei dati.
1. Preparazione del paziente e generazione di dataset
NOTA: Il partecipante (maschio, 49 anni, 83 kg, 1,75 m di altezza) aveva diversi marcatori di tantalio di 0,8 mm di diametro precedentemente impiantati nel calcagno (3 marcatori), nell'astragalo (4 marcatori) e nella tibia (5 marcatori; Figura 1).
- Acquisire una scansione TC con un algoritmo di riduzione degli artefatti metallici (per ridurre la distorsione dell'immagine dovuta agli impianti metallici) sul piede del partecipante in una postura della caviglia massimamente flessa plantare con una dimensione dei pixel di 0,500 mm o inferiore e uno spessore della fetta di 0,625 mm o inferiore.
NOTA: In questo caso, il piede destro del partecipante è stato scansionato con una risoluzione di 0,441 mm x 0,441 mm x 0,625 mm. Le posizioni dei marcatori non sono posizionate in posizioni anatomiche specifiche all'interno dell'osso4; invece, sono distribuiti in tutto l'osso5. - Per i metodi di raccolta della videoradiografia biplanare e di elaborazione dettagliata dei dati, vedere17. In breve, chiedi al partecipante di completare il movimento desiderato, con la posizione di partenza curata in modo tale che il piede atterri nel volume della videoradiografia biplanare. Utilizzare un oggetto di calibrazione e griglie senza distorsione per individuare le telecamere e non distorcere le immagini, rispettivamente18.
NOTA: Il partecipante a questo studio ha completato le prove di due diversi movimenti. Hanno saltato su un metronomo a 108 bpm e hanno fatto jogging lentamente attraverso il volume. Le immagini sono state catturate in modo continuo a 250 Hz con una velocità dell'otturatore di 1111 μs e il sistema a raggi X è stato impostato su 70 kV e 100 mA. - Segmenta individualmente i marcatori utilizzando il software di elaborazione delle immagini mediche 3D. Utilizzando l'algoritmo di riempimento in base al contenuto nell'editor di grafica raster e le posizioni note dei marcatori, rimuovere i marcatori dalle immagini DICOM. Creare i volumi parziali ossei e le mesh tassellate segmentando le immagini senza marcatore, come mostrato in17. Allineare sia i volumi parziali che le mesh e conservarle nello spazio CT.
- Per ogni fotogramma, tabulare le coordinate dell'immagine x-y non filtrate di ciascun marcatore in XMALab ed esportarlo18. Triangola le coordinate 3D utilizzando il toolbox di visione artificiale in MATLAB. Stimare la posa facendo corrispondere le posizioni dei marcatori 3D nello spazio dei raggi X ai centroidi sferici nello spazio CT utilizzando un approccio dei minimi quadrati19. Utilizzare lo stesso algoritmo nell'editor di grafica raster per rimuovere i marcatori nelle immagini a raggi X per prepararle per il tracciamento.
2. Accedi al set di dati e al codice
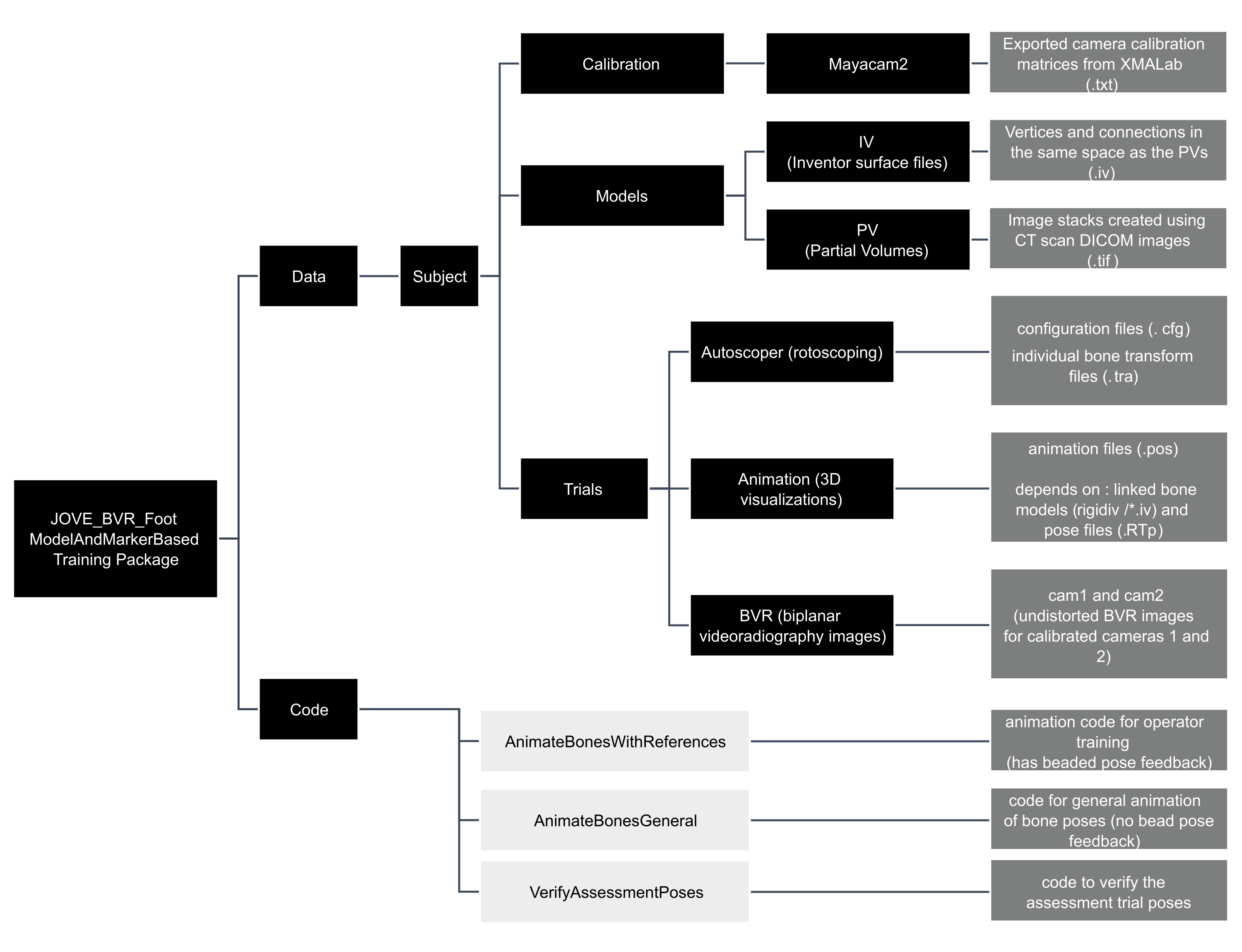
- Scarica il set di dati da qui. Sono disponibili immagini BVR e file di calibrazione per ogni prova, nonché stime di posa di riferimento salvate in formato .tra (Figura 2). Scarica/clona il pacchetto di codice da: https://github.com/skelobslab/JOVE_BVR_FootModelAndMarkerBased.

Figura 2: Struttura dei dati del pacchetto di formazione JOVE_BVR_Foot_ModelAndMarkerBased. Le cartelle vengono visualizzate in caselle nere, il codice viene visualizzato in caselle grigio chiaro e le descrizioni dei file sono contenute in caselle grigio scuro. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
3. Valutare l'accuratezza dell'algoritmo di tracciamento del modello
- Salva le stime delle pose come file .tra nella cartella di riferimento della prova. Disporre il file .tra con la posa dallo spazio osseo allo spazio radiografico scritta in un formato di 1 riga x 16 colonne, con ogni riga corrispondente al fotogramma e alla matrice di posa 4 x 4 scritta come [prima colonna, seconda colonna, terza colonna e quarta colonna].
NOTA: Lo spazio osseo è sinonimo di spazio CT in questo set di dati. - Verificare le stime di posa aprendo lo script verifyAssessmentPoses.m nella piattaforma di calcolo e quindi facendo clic su Esegui. Caricare i file come descritto nelle istruzioni. Lo script calcolerà l'asse elicoidale tra la stima della posa basata sul modello e quella basata sul marcatore e restituirà una differenza di rotazione e traslazione per ogni fotogramma di dati tracciati.
4. Formazione per nuovi operatori
NOTA: Questa sezione descrive la formazione con feedback per un nuovo operatore. In questo caso, Autoscoper è il software di stima della posa basato su modello selezionato, ma altri software potrebbero essere utilizzati in sostituzione.
- Scarica l'ultima versione del software per la stima della posa da: https://simtk.org/projects/autoscoper.
- Per individuare i file BVR locali, aprire il file in un editor di testo (.\JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\POINTER_T0019_jog001.cfg). Il software utilizza un file puntatore (.cfg) per individuare i file. Modificare le directory in modo che portino ai file locali appropriati. Salva il file e chiudilo.
- Per caricare le immagini BVR e le informazioni sulla fotocamera, aprire il software di stima della posa e fare clic su Carica prova. Passare al file di configurazione del puntatore salvato nel passaggio precedente e fare clic su Apri.
- Per tracciare, seguire il protocollo in Akhbari et al17 (tracciamento basato su modelli). In breve, ruota e trasla l'osso facendo clic e trascinando gli assi sull'osso fino a quando non sei soddisfatto della posizione e dell'orientamento del calcagno. Premere il tasto S sulla tastiera per salvare il fotogramma corrente per il calcagno (cal).
NOTA: Le impostazioni del filtro sono incluse in \JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\ che può essere utilizzato per il filtraggio come mostrato in Akhbari et al17. - Per salvare i file, fare clic su Salva tracciamento. Salva il file come [Numero di prova]_[Numero soggetto]_[Nome della prova]_[Codice osso di 3 lettere].tra (ad esempio, T0019_SOL001A_jog0001_cal.tra) nella directory desiderata. Esporta le impostazioni come corrente, matrice, colonna, virgola, nessuno, mm, gradi.
NOTA: I codici ossei a tre lettere per la tibia e l'astragalo sono rispettivamente tib e tal. - Per creare file per il rilevamento della precisione, aprire la piattaforma di calcolo ed eseguire lo script animateBonesWithReferences.m nella cartella del codice. Passare alle cartelle all'interno del pacchetto di formazione come richiesto dalle finestre di dialogo.
NOTA: il codice animateBonesWithReferences.m è un codice specializzato per l'addestramento che fornisce le pose dai dati basati su marcatori come feedback per migliorare il tracciamento del nuovo operatore. - Installa il software di visualizzazione da: https://github.com/DavidLaidlaw/WristVisualizer/tree/master. Per visualizzare il tracciamento, aprire il file .pos creato al punto 4.6 nel software di visualizzazione; La posizione del file sarà nella finestra di comando della piattaforma di calcolo.
- Verificare l'allineamento dell'osso tracciato (grigio) con l'osso di riferimento. Il colore verde indica che la posa rientra nelle soglie di rotazione e traslazione, mentre il rosso indica che si trova al di fuori della soglia. Continuate a tracciare e visualizzare fino a quando tutti i fotogrammi non diventano verdi. Se necessario, modificate le soglie (phi - rotazione, trans - traslazione) nelle righe 10 e 11 dello script animateBonesWithReferences.m.
NOTA: Se l'osso di riferimento è rosso (Figura 3A), significa che la posa è a più di 1 mm o 2° di distanza dalla posa basata sul marcatore, misurata utilizzando l'asse elicoidale. Se è verde, e visivamente è ragionevole, quel fotogramma viene tracciato sufficientemente bene (Figura 3B). - Per tracciare le altre ossa del complesso della caviglia, ripetere i passaggi da 4.4 a 4.8 per l'astragalo e la tibia. Utilizzare il software di visualizzazione per assicurarsi che le ossa non si scontrino.
- Per completare la valutazione, tracciare e visualizzare la tibia, l'astragalo e il calcagno nella prova chiamata prova di valutazione.
- Apri la piattaforma di calcolo ed esegui il codice animateBonesGeneral.m. Passare alle cartelle all'interno del pacchetto di formazione come richiesto dalle finestre di dialogo. Verificare le pose ossee utilizzando il file .pos nel software di visualizzazione. Questo codice è generalizzabile ad altri studi per la visualizzazione 3D delle ossa.
NOTA: La posa vera basata sul pennarello non sarà più disponibile. Saranno presenti solo le ossa grigie.
- Apri la piattaforma di calcolo ed esegui il codice animateBonesGeneral.m. Passare alle cartelle all'interno del pacchetto di formazione come richiesto dalle finestre di dialogo. Verificare le pose ossee utilizzando il file .pos nel software di visualizzazione. Questo codice è generalizzabile ad altri studi per la visualizzazione 3D delle ossa.
- Per valutare le stime di posa, aprire lo script verifyAssessmentPoses.m nella piattaforma di calcolo e fare clic su Esegui. Lo script calcolerà l'asse elicoidale tra la stima della posa basata sul modello e quella basata sul marcatore e restituirà una differenza di rotazione e traslazione per ogni fotogramma di dati tracciati. In questo modo verrà prodotto lo stesso grafico di animateBoneswithReferences.m, ma non verrà prodotta un'animazione.
- Verificare che tutti i punti dati siano al di sotto della soglia selezionata (linea piatta) sia per la rotazione che per la traslazione. Se necessario, salva i risultati in un file .csv.

Figura 3: Visualizzazione del tracciamento accettabile e inaccettabile. (A) Osso del calcagno tracciato utilizzando il tracciamento basato sul modello (grigio; indicato anche dalla freccia grigia) che non corrisponde sufficientemente alla posa della stima della posa basata sul marcatore (rosso; indicato anche dalla freccia rossa). (B) Calcagno che corrisponda sufficientemente alla posa della stima della posa basata sul marcatore. Di conseguenza, il calcagno tracciato con il marker viene mostrato in verde (indicato anche dalle frecce grigie e verdi). Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
Risultati
Due nuovi operatori e un esperto hanno completato la formazione basata su modelli. I 41 frame dello studio di valutazione hanno misurato la competenza del loro tracciamento basato su modelli (Figura 4). Le stime di posa degli operatori erano in genere ben al di sotto delle soglie stabilite. La distorsione mediana media (intervallo) nella rotazione tra le ossa era di 0,75° (da 0,69° a 0,85°) per il calcagno, 0,40° (da 0,37° a 0,46°) per l'astragalo e 0,89° (da 0,76° a 1,07°) per la tibia. La distorsione di traslazione mediana media è stata di 0,10 mm (da 0,05 mm a 0,16 mm) per il calcagno, di 0,31 mm (da 0,22 mm a 0,41 mm) per l'astragalo e di 0,33 mm (da 0,27 mm a 0,37 mm) per la tibia. Questi risultati suggeriscono che il tutorial è efficace nell'addestrare gli operatori a rispettare una tolleranza impostata.

Figura 4: Bias di rotazione e traslazione per nuovi operatori e un esperto. Grafici a violino20 che mostrano distorsioni nella rotazione (A)(C)(E) e nella traduzione (B)(D)(F) tra stime di posa basate su modello e basate su marcatori per due nuovi operatori e un esperto per il calcagno (A)(B), l'astragalo (C)(D) e la tibia (E)(F). Tutti i 41 fotogrammi della prova di valutazione sono mostrati come punti dati, con la mediana (cerchio bianco), l'intervallo interquartile (linea verticale spessa) e la media (linea orizzontale spessa). La linea nera a 2° e 1 mm rappresenta le soglie selezionate. I sei fotogrammi al di fuori della soglia per il nuovo operatore 2 in (E) non vengono visualizzati. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
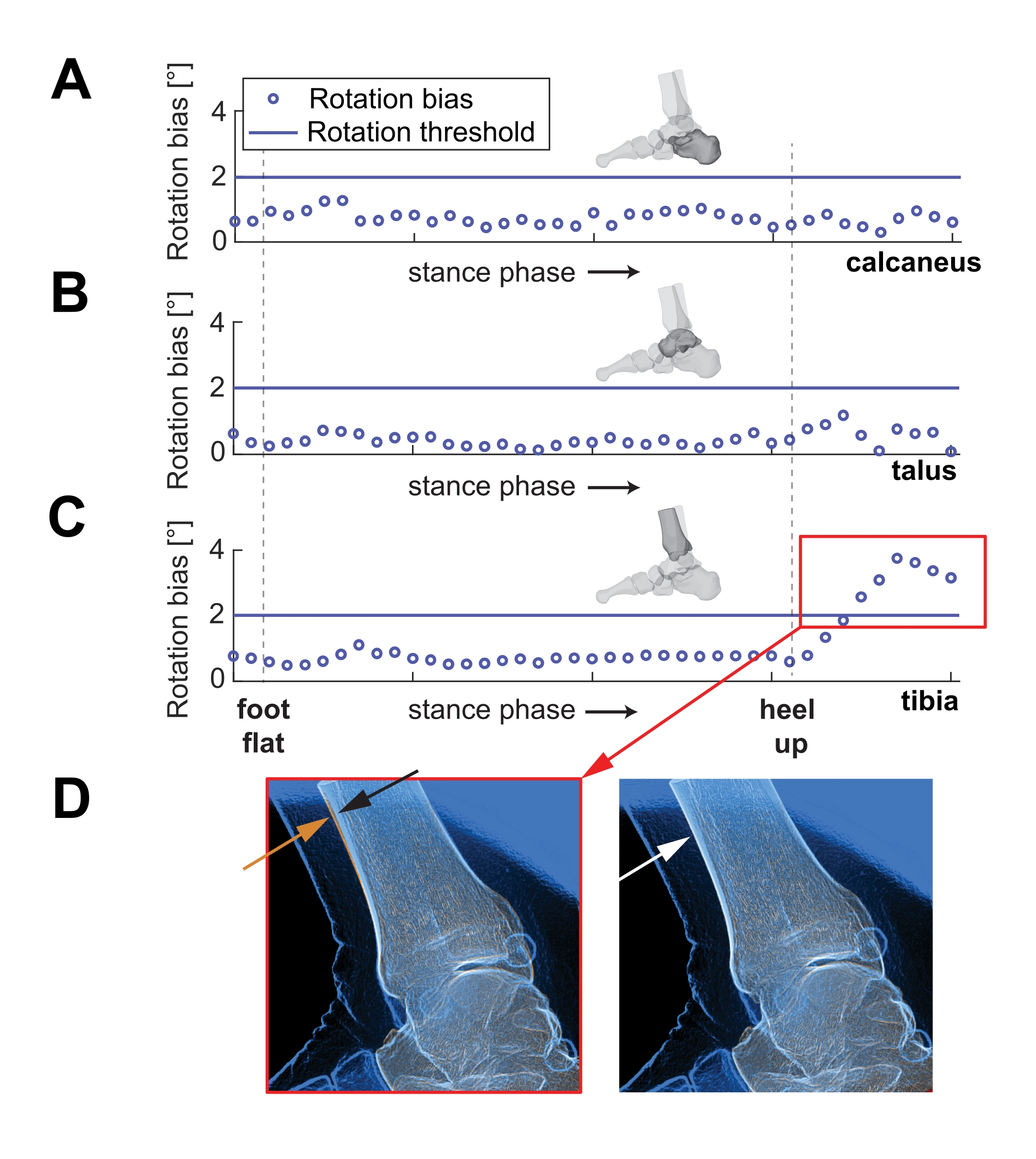
Un nuovo operatore aveva sei fotogrammi sopra la soglia di rotazione di 2° nel tracciamento della tibia. I frame sono stati identificati utilizzando uno dei grafici generati in verifyAssessmentPoses.m (Figura 5). Questi sei fotogrammi sono più difficili da tracciare a causa dell'occlusione della tibia da parte dell'altro piede che oscilla attraverso la vista.

Figura 5: Distorsione di rotazione per ogni frame rispetto alla fase di posizione. Esempio del secondo tracciamento della rotazione del nuovo operatore su una parte della fase di appoggio della corsa, per (A) il calcagno, (B) l'astragalo e (C) la tibia. Si noti che la casella rossa in (C) mostra i fotogrammi con errori elevati. (D) A sinistra, un'immagine rappresentativa mostra la differenza approssimativa nell'allineamento delle linee arancioni e blu della tibia anteriore (indicata da frecce arancioni e nere). L'immagine a destra mostra un esempio di tibia ben tracciata (indicata dalla freccia bianca). Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
File supplementare. Clicca qui per scaricare questo file.
Discussione
Una stima accurata della posa basata su modelli è fondamentale per misurare l'artrocinematica e il movimento scheletrico. I precedenti metodi di validazione per la stima della posa si sono basati su campioni cadaverici con marcatori impiantati, senza carico in vivo e range di movimento articolare. Questo set di dati in vivo di corsa e salto con stima della posa basata su marcatori consente la convalida di algoritmi basati su modelli. Inoltre, il set di dati è organizzato per addestrare nuovi operatori, in modo tale che la stima iniziale richiesta per la maggior parte degli algoritmi basati su modelli rientri in una tolleranza impostata, riducendo la variabilità tra operatori. Il codice MATLAB viene fornito in modo tale che le ossa possano essere animate e che venga generato automaticamente un feedback sulla qualità della posa.
I nuovi operatori sono stati addestrati con successo entro una tolleranza impostata di 2° di rotazione e 1 mm di traslazione. Questi limiti sono molto più bassi dell'affidabilità interoperatore riportata, che può arrivare fino a 5 mm e 10°1. Tuttavia, le tolleranze selezionate sono da 2 a 4 volte superiori all'errore RMS di altri esperimenti su piede cadavere intatto (0,59 mm e 0,71°16). Le tolleranze includono gli intervalli di errore RMS più alti, ma rappresentano comunque un miglioramento sostanziale rispetto alla variabilità interoperatore riportata. Inoltre, le condizioni in vivo sono più difficili da tracciare rispetto alle posture statiche del piede a causa della variazione dell'occlusione di ossa, tessuti molli e artefatti di movimento ad alta velocità attraverso il volume dei raggi X. I nuovi operatori hanno eseguito con successo il rotoscopio delle prove entro la tolleranza ed erano vicini ai risultati dell'esperto, ad eccezione dei sei fotogrammi mostrati nella Figura 5C. Pertanto, la tolleranza impostata rappresenta un miglioramento rispetto alla variabilità interoperatore riportata e i risultati mostrano che questo metodo può addestrare con successo nuovi operatori all'interno di tale tolleranza.
Un passaggio critico in questo protocollo è l'iterazione tra il rotoscoping nel software selezionato e la visualizzazione in 3D. Questa iterazione è importante per capire come sono orientate le ossa nello spazio. Consente all'operatore di verificare se le pose ossee sono biologicamente fattibili e non si scontrano con altre ossa. L'alternanza continua tra rotoscoping e visualizzazione migliora la qualità delle stime finali della posa ossea e aiuta a rilevare gli errori di ottimizzazione.
Il set di formazione, in particolare la prova di valutazione, include scenari di tracciamento impegnativi per superare i limiti dei nuovi operatori. La posizione delle sorgenti di raggi X e degli intensificatori di immagine in questa collezione ha fatto sì che il piede oscillante occludesse le viste, creando difficoltà per l'allineamento dei modelli ossei. Il nuovo operatore, con diversi fotogrammi sopra la soglia di rotazione, risentiva del piede controlaterale che oscurava la visuale. Strategie come la modifica delle impostazioni del filtro e il rotoscoping dei fotogrammi immediatamente prima e dopo l'occlusione possono aiutare a mitigare questi problemi. Inoltre, l'orientamento dei sistemi di coordinate differisce sufficientemente tra i DICOM e il software di stima della posa, causando un'inversione dell'angolo nella tibia. Gli operatori devono tenere traccia di ogni fotogramma a questo punto per superare questa sfida. Questi scenari non sono rari nelle raccolte di dati e rappresentano sfide che la stima automatica della posa basata su modelli dovrebbe affrontare in futuro e sono quindi un'aggiunta preziosa a questo set di dati.
Ci sono alcune limitazioni con questo protocollo. In primo luogo, dichiarare la stima della posa basata su marcatori come gold standard è controverso in quanto la differenza di accuratezza tra la stima della posa basata su marcatori e quella basata su modelli non è in genere di un ordine di grandezza diverso 2,3,10. Tuttavia, è probabile che i cambiamenti visivi nelle immagini BVR che si verificano con le raccolte in vivo (ad esempio, artefatti di movimento, tessuti molli e occlusione ossea) abbiano maggiori probabilità di indurre errori nella stima della posa basata su modelli rispetto ai metodi basati su marcatori. Sono necessarie ulteriori sperimentazioni per confermare questa ipotesi. Inoltre, questo set di dati non acquisisce tutte le raccolte di raggi X biplanari. L'orientamento delle telecamere, in modo tale che le ossa si trovino in posizioni relative diverse, potrebbe modificare l'importanza della caratteristica ossea e influenzare di conseguenza la funzione di costo dell'algoritmo di corrispondenza delle pose. Inoltre, queste funzioni possono essere influenzate dalle impostazioni del filtro immagine 15,17. Pertanto, questo set di dati non è necessariamente una valutazione generalizzabile dell'accuratezza del BVR. Invece, è uno strumento per addestrare gli utenti a inserire stime di posa iniziali appropriate e per migliorare gli algoritmi di stima della posa basati su modelli fino a quando non sono più necessarie ipotesi iniziali rotoscopizzate manualmente.
Divulgazioni
Gli autori non hanno conflitti di interesse da rivelare.
Riconoscimenti
Questo lavoro è stato finanziato dal NSERC Discovery Grant (RGPIN/04688-2015) e dall'Ontario Early Researcher Award.
Materiali
| Name | Company | Catalog Number | Comments |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper; pose estimation software | |
| Code | Queen's University | https://github.com/skelobslab/JOVE_BVR_FootModelAndMarker Based | |
| Content-Aware Fill algorithm, Photoshop | Adobe | ||
| Dataset | Queen's University | Download here | |
| MATLAB | Mathworks | n/a | computing platform |
| Mimics | Materialise, Belgium | 3D image processing software | |
| Revolution HD | General Electric Medical Systems | CT scan device used | |
| WristVisualizer | Brown University | https://github.com/DavidLaidlaw/WristVisualizer/tree/master; Visualization software | |
| XMALab | Brown University | https://bitbucket.org/xromm/xmalab/src/master/ |
Riferimenti
- Maharaj, J. N., et al. The reliability of foot and ankle bone and joint kinematics measured with biplanar videoradiography and manual scientific rotoscoping. Frontiers in Bioengineering and Biotechnology. 8 (106), (2020).
- Iaquinto, J. M., et al. Model-based tracking of the bones of the foot: A biplane fluoroscopy validation study. Computers in Biology and Medicine. 92, 118-127 (2018).
- Miranda, D. L., et al. Static and dynamic error of a biplanar videoradiography system using marker-based and markerless tracking techniques. Journal of Biomechanical Engineering. 133 (12), 121002 (2011).
- Tashman, S., Anderst, W. In-vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of Experimental Zoology Part A: Ecological Genetics and Physiology. 313 (5), 262-279 (2010).
- Challis, J. H. A procedure for determining rigid body transformation parameters. Journal of Biomechanics. 28 (6), 733-737 (1995).
- Lundberg, A., Goldie, I., Kalin, B. O., Selvik, G. Kinematics of the ankle/foot complex: plantarflexion and dorsiflexion. Foot & ankle. 9 (4), 194-200 (1989).
- You, B. -. M., Siy, P., Anderst, W., Tashman, S. In vivo measurement of 3-D skeletal kinematics from sequences of biplane radiographs: Application to knee kinematics. IEEE Transactions on Medical Imaging. 20 (6), 514-525 (2001).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a new model-based tracking technique for measuring three-dimensional, in vivo glenohumeral joint kinematics. Journal of Biomechanical Engineering. 128 (4), 604-609 (2006).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of three-dimensional model-based tibio-femoral tracking during running. Medical Engineering & Physics. 31 (1), 10-16 (2009).
- Martin, D. E., et al. Model-based tracking of the hip: implications for novel analyses of hip pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Massimini, D. F. Non-invasive determination of coupled motion of the scapula and humerus-An in-vitro validation. Journal of Biomechanics. 44 (3), 408-412 (2011).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8 (1), 1-10 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Cross, J. A., et al. Biplane fluoroscopy for hindfoot motion analysis during gait: A model-based evaluation. Medical Engineering & Physics. 43, 118-123 (2017).
- Akhbari, B., Morton, A. M., Moore, D. C., Crisco, J. J. Biplanar videoradiography to study the wrist and distal radioulnar joints. JoVE Journal of Visualized Experiments. (168), e62102 (2021).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM). Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Söderkvist, I., Wedin, P. -. &. #. 1. 9. 7. ;. Determining the movements of the skeleton using well-configured markers. Journal of Biomechanics. 26 (12), 1473-1477 (1993).
- Violin Plots for Matlab. Available from: https://github.com/bastibe/Violinplot-Matlab (2021)
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati