
Method Article
Biplanarer Videoradiographie-Datensatz für die Entwicklung modellbasierter Posenschätzung und die Schulung neuer Benutzer
In diesem Artikel
Zusammenfassung
In dieser Arbeit wird ein in vivo Datensatz mit Knochenposen vorgestellt, die mit markerbasierten Methoden geschätzt wurden. Hier wird eine Methode vorgestellt, mit der Bediener darin geschult werden können, ihre anfänglichen Schätzungen für die modellbasierte Posenschätzung zu verbessern und die Variabilität zwischen den Bedienern zu reduzieren.
Zusammenfassung
Die Messung der Bewegung der kleinen Fußknochen ist entscheidend für das Verständnis des pathologischen Funktionsverlusts. Die biplanare Videoradiographie eignet sich gut für die Messung von Knochenbewegungen in vivo , aber Herausforderungen ergeben sich bei der Abschätzung der Rotation und Translation (Pose) jedes Knochens. Die Pose des Knochens wird in der Regel mit marker- oder modellbasierten Methoden geschätzt. Markerbasierte Methoden sind hochgenau, aber aufgrund ihrer Invasivität in vivo unüblich. Modellbasierte Methoden sind häufiger anzutreffen, aber derzeit weniger genau, da sie auf Benutzereingaben und laborspezifischen Algorithmen beruhen. Diese Arbeit präsentiert einen seltenen in vivo Datensatz der Calcaneus-, Talus- und Tibia-Posen, wie sie mit markerbasierten Methoden beim Laufen und Hüpfen gemessen wurden. Es ist eine Methode enthalten, mit der Benutzer darin geschult werden können, ihre anfänglichen Vermutungen in modellbasierter Software zur Posenschätzung zu verbessern, indem markerbasiertes visuelles Feedback verwendet wird. Neue Bediener waren in der Lage, Knochenposen innerhalb von 2° der Drehung und 1 mm Translation der markerbasierten Pose zu schätzen, ähnlich wie ein erfahrener Benutzer der modellbasierten Software, was eine erhebliche Verbesserung gegenüber der zuvor berichteten Variabilität zwischen den Bedienern darstellt. Darüber hinaus kann dieser Datensatz zur Validierung anderer modellbasierter Software zur Posenschätzung verwendet werden. Letztendlich wird die Freigabe dieses Datensatzes die Geschwindigkeit und Genauigkeit verbessern, mit der Benutzer Knochenposen aus biplanarer Videoradiographie messen können.
Einleitung
Die Messung der Bewegung der kleinen Fußknochen ist entscheidend für das Verständnis des pathologischen Funktionsverlusts. Die dynamische Messung der Fußknochenbewegung ist jedoch aufgrund der geringen Größe und der dicht gepackten Konfiguration der Knochen und Gelenke eine Herausforderung 1,2. Die biplanare Videoradiographie (BVR)-Technologie eignet sich gut, um die dreidimensionale (3D) In-vivo-Bewegung der kleinen Knochen des Fußes und des Knöchels bei dynamischen Aktivitäten zu messen. Das BVR ermöglicht Einblicke in die Arthro-Kinematik durch den Einsatz von zwei Röntgenquellen, die mit Bildverstärkern gekoppelt sind, die Röntgenstrahlen dynamischer Bewegung in sichtbares Licht umwandeln. Während sich der Fuß durch das Aufnahmevolumen bewegt, nehmen Hochgeschwindigkeitskameras die Bilder auf. Die Bilder werden unverzerrt und mit den kalibrierten Kamerapositionen 3,4 in das Aufnahmevolumen projiziert. Die Knochenhaltung mit sechs Freiheitsgraden (6 d.o.f.) (3 d.o.f. für die Position und 3 d.o.f. für die Orientierung) wird dann entweder mit markerbasierten oder modellbasierten Methodengeschätzt 3.
Die marker- oder modellbasierten Methoden zur Schätzung von Posen variieren je nach Labor und Disziplin. Der Goldstandard der dynamischen BVR-Pose-Messung ist die Implantation von kleinen Tantalmarkern in den interessierenden Knochen 4,5. Für die Schätzung der Pose sind mindestens drei Marker pro Knochen erforderlich, wobei zusätzliche Marker zu einer höheren Genauigkeit führen 5,6. In vivo ist diese Methode aufgrund ihrer Invasivität weniger verbreitet, da sie eine chirurgische Implantation erfordert und die Marker dann dauerhaft in den Knochen eingebettet werden7. Alternativ werden beim modellbasierten Tracking volumetrische Informationen aus anderen Bildgebungsmodalitäten wie der Computertomographie (CT) oder der Magnetresonanztomographie verwendet, um das Modell auf den BVR-Bildern nachzubilden 2,3,8,9,10,11,12,13,14,15 . Das Modell wird dann halbmanuell so manipuliert, dass es den Bildern am besten entspricht (Rotoskopie), wobei in der Regel eine Kombination aus Benutzereingaben als erste Schätzung und kreuzkorrelativer Optimierungverwendet wird 3,8,9,10,15. Die modellbasierte Posenschätzung ist weniger invasiv und daher häufiger, hat aber eine längere Verarbeitungszeit und erfordert Benutzereingaben. Da der Rotoskopieprozess derzeit halbmanuell ist, besteht nach wie vor die Notwendigkeit, die Bediener zuverlässig in der laborspezifischen Software zu schulen, da die RMS-Fehler (Root Mean Square) zwischen den Bedienern zwischen den Bedienern zwischen den Bedienern zwischen 0,83 mm und 4,96 mm und 0,58° bis 10,29° entlang oder um eine einzelne Achse reichenkönnen 1. Darüber hinaus werden die Modellanpassungsalgorithmen verbessert, erfordern jedoch eine Validierung mit experimentellen Paradigmen, die den In-vivo-Bedingungen so nahe wie möglich kommen.
Die Genauigkeit modellbasierter Posenschätzungen wird häufig anhand markerbasierter Metriken bewertet. Zum Beispiel wurden menschliche Leichenfüße, die mit Markern implantiert wurden, durch simulierte Bewegungspositionen13, 14 und 16 bewegt. Die aufgenommenen BVR-Bilder werden dann der modellbasierten Rotoskopie-Methode zugeführt und mit den markerbasierten Metriken auf Genauigkeit (Bias und Präzision) verglichen. Die Verwendung eines statischen Leichenfußes ist zwar ein wertvoller Ansatz, hat aber Einschränkungen bei der Beurteilung der tatsächlichen Genauigkeit der Knochenpose in vivo. Zum Beispiel sind die Gelenkpositionen bei einem Leichenfuß relativ konstant, da keine Muskelaktivität und In-vivo-Belastungen vorhanden sind. Daher stellt es möglicherweise nicht die Grenzen der Gelenkbewegung bei verschiedenen lokomotorischen Aufgaben dar. Variationen in der Gelenkhaltung verändern die Okklusion in den BVR-Bildern, was eine Quelle von Messfehlern bei der Abschätzung kleiner, dicht gepackter Fußknochenposen darstellt13. Darüber hinaus würde bei der Verwendung von Bildabgleichsalgorithmen das Vorhandensein von Markern in den BVR-Bildern wahrscheinlich die Ergebnisse verzerren. Während Gruppen die Marker ausden Bildern der Computertomographie (CT) für digitale Bildgebung und Kommunikation in der Medizin (DICOM) 9,14,16 entfernt haben, werden sie nur gelegentlich auch aus den biplanaren Videoradiographiebildernentfernt 16.
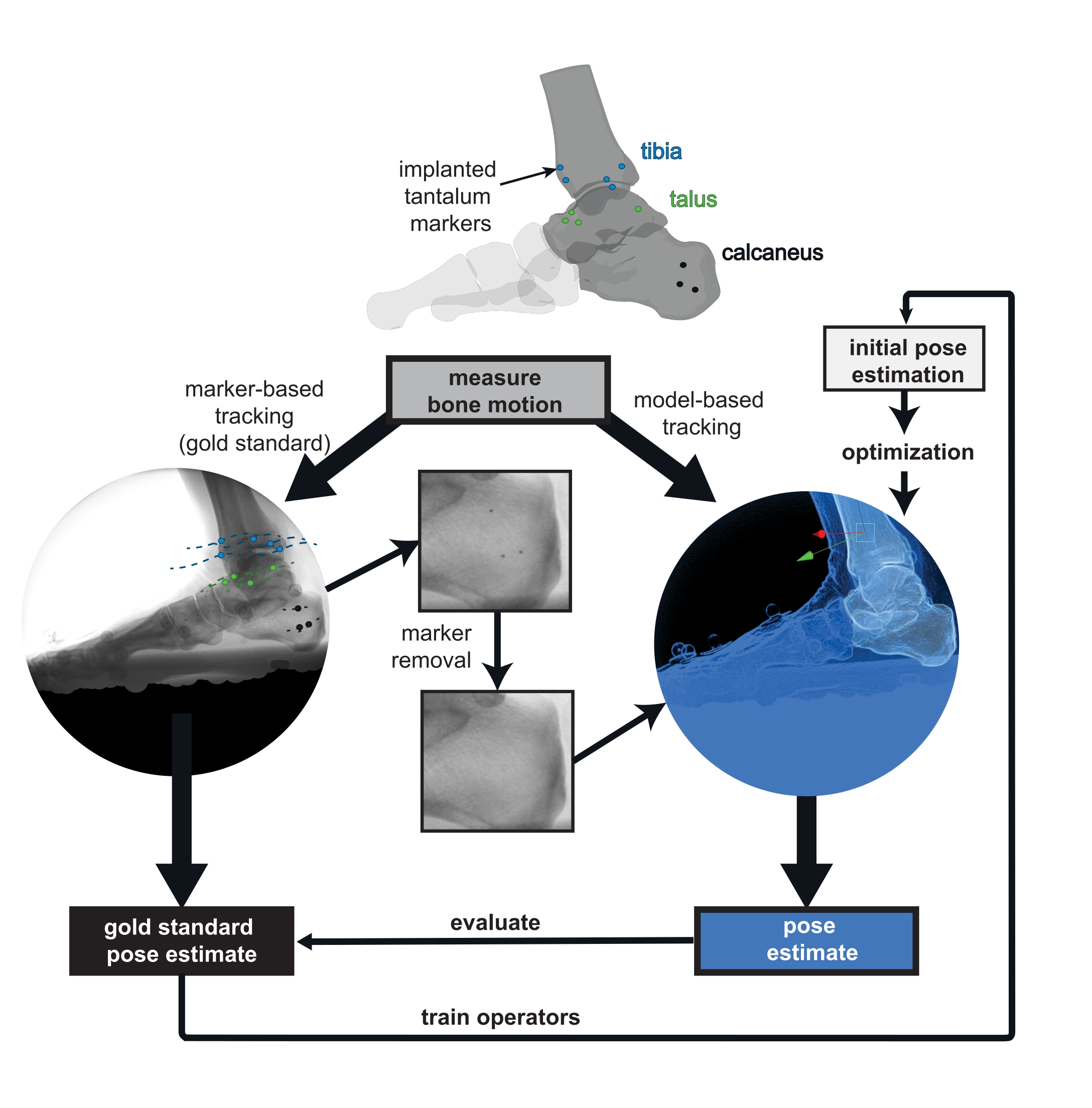
Diese Arbeit präsentiert einen Open-Source-BVR-Datensatz eines in vivo hüpfenden und rennenden Teilnehmers, dem Marker in seine Fuß- und Knöchelknochen implantiert wurden (Abbildung 1). Es wird eine markerbasierte Posenschätzung für die in vivo Knochenbewegung der Tibia, des Talus und des Calcaneus bereitgestellt. Die Marker wurden sowohl aus den Röntgen- als auch aus den CT-Bildern entfernt, um Verzerrungen zu begrenzen, die bei der Bewertung der modellbasierten Tracking-Genauigkeit auftreten. Dieser Datensatz ist für die Bewertung der Genauigkeit von modellbasierter Software zur Posenschätzung und für die Verbesserung der Auswahl anfänglicher Posenschätzungen für halbmanuelle Prozesse gedacht. Es eignet sich am besten für Personen, die die Geschwindigkeit und Genauigkeit der BVR-Bildverarbeitungspipeline verbessern möchten, und für Labore, die eine geringe Variabilität zwischen den Bedienern bei der anfänglichen Posenschätzung wünschen.

Abbildung 1: Überblick über den bereitgestellten Datensatz der biplanaren Videoradiographie (BVR). Implantierte Marker werden in vivo als Goldstandard für die Schätzung der Knochenpose verfolgt. Die Marker wurden digital aus den BVR-Bildern und den Computertomographie-Scans entfernt, um Verzerrungen im modellbasierten Tracking zu vermeiden. Posen, die von einer modellbasierten Tracking-Software geschätzt werden, können mit dem Goldstandard des markerbasierten Trackings verglichen werden. Die markerbasierte Posenschätzung kann auch verwendet werden, um neue Bediener zu schulen, um ihre anfängliche Knochenposenschätzung für modellbasiertes Tracking zu verbessern. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Protokoll
Die Versuchsprotokolle wurden vom Forschungsethikrat der Queen's University Health Sciences und der angeschlossenen Lehrkrankenhäuser genehmigt. Der Teilnehmer gab vor der Teilnahme an der Datenerhebung eine Einverständniserklärung ab.
1. Patientenvorbereitung und Datensatzerstellung
HINWEIS: Dem Teilnehmer (männlich, 49 Jahre, 83 kg, 1,75 m groß) wurden zuvor mehrere Tantalmarker mit einem Durchmesser von 0,8 mm in den Fersenbein (3 Marker), den Talus (4 Marker) und das Schienbein (5 Marker; Abbildung 1).
- Erfassen Sie einen CT-Scan mit einem Algorithmus zur Reduzierung von Metallartefakten (zur Reduzierung der Bildverzerrung durch Metallimplantate) am Fuß des Teilnehmers in einer maximal plantarflexierten Knöchelhaltung mit einer Pixelgröße von 0,500 mm oder weniger und einer Schichtdicke von 0,625 mm oder weniger.
HINWEIS: Hier wurde der rechte Fuß des Teilnehmers mit einer Auflösung von 0,441 mm x 0,441 mm x 0,625 mm gescannt. Die Positionen der Marker sind nicht an bestimmten anatomischen Stellen innerhalb des Knochensplatziert 4; Stattdessen sind sie über den gesamten Knochenverteilt 5. - Für Methoden zur Erfassung biplanarer Videoradiographie und zur Verarbeitung der Daten im Detail siehe17. Bitten Sie den Teilnehmer kurz, die gewünschte Bewegung auszuführen, wobei die Startposition so kuratiert ist, dass der Fuß im biplanaren Videoradiographie-Volumen landet. Verwenden Sie ein Kalibrierungsobjekt und unverzerrte Raster, um die Kameras zu lokalisieren bzw. die Bilder zu verzerren18.
HINWEIS: Der Teilnehmer an dieser Studie führte Versuche mit zwei verschiedenen Bewegungen durch. Sie hüpften zu einem Metronom mit 108 bpm und joggten langsam durch die Lautstärke. Die Bilder wurden kontinuierlich bei 250 Hz mit einer Verschlusszeit von 1111 μs aufgenommen, und das Röntgensystem wurde auf 70 kV und 100 mA eingestellt. - Segmentieren Sie die Marker individuell mit einer medizinischen 3D-Bildverarbeitungssoftware. Entfernen Sie mithilfe des inhaltsbasierten Füllalgorithmus im Rastergrafik-Editor und der bekannten Markierungspositionen die Markierungen aus den DICOM-Bildern. Erstellen Sie die Bone-Teilvolumina und die mosaikartigen Netze durch Segmentierung der Bilder ohne Markierung, wie in17 gezeigt. Richten Sie sowohl die Teilvolumina als auch die Netze aus und speichern Sie sie im CT-Raum.
- Für jeden Frame werden die ungefilterten x-y-Bildkoordinaten jedes Markers in XMALab tabellarisch dargestellt und exportiert18. Triangulieren Sie die 3D-Koordinaten mit der Computer Vision Toolbox in MATLAB. Schätzen Sie die Pose, indem Sie die Positionen der 3D-Marker im Röntgenraum mit den kugelangepassten Schwerpunkten im CT-Raum abgleichen, indem Sie einen Ansatz der kleinsten Quadrate19 verwenden. Verwenden Sie denselben Algorithmus im Rastergrafikeditor, um die Markierungen in den Röntgenbildern zu entfernen und sie für die Verfolgung vorzubereiten.
2. Greifen Sie auf den Datensatz und den Code zu
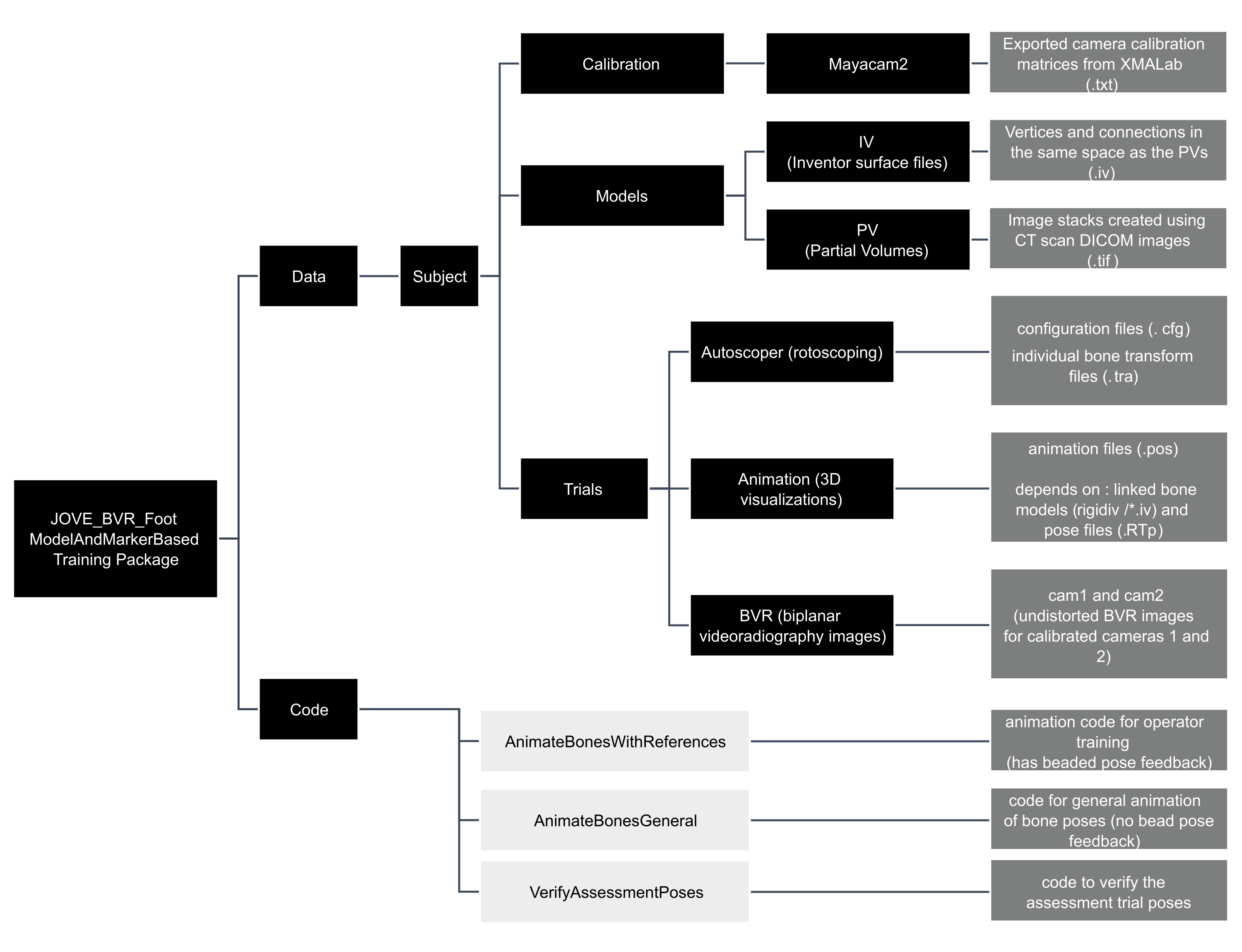
- Laden Sie den Datensatz hier herunter. Für jeden Versuch gibt es BVR-Bilder und Kalibrierungsdateien sowie Schätzungen der Referenzposen, die im .tra-Format gespeichert sind (Abbildung 2). Laden Sie das Codepaket herunter bzw. klonen Sie es von: https://github.com/skelobslab/JOVE_BVR_FootModelAndMarkerBased.

Abbildung 2: Datenbaum des JOVE_BVR_Foot_ModelAndMarkerBased Trainingspakets. Ordner werden in schwarzen Feldern angezeigt, Code in hellgrauen Feldern und Beschreibungen von Dateien in dunkelgrauen Feldern. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
3. Bewerten Sie die Genauigkeit des Modellverfolgungsalgorithmus
- Speichern Sie Pose-Schätzungen als .tra-Datei im Referenzordner der Testversion. Ordnen Sie die .tra-Datei so an, dass die Pose vom Knochenraum bis zum Röntgenraum in einem Format von 1 Zeile x 16 Spalten geschrieben ist, wobei jede Zeile dem Rahmen entspricht und die 4 x 4-Posenmatrix als [erste Spalte, zweite Spalte, dritte Spalte und vierte Spalte] ausgeschrieben wird.
HINWEIS: Der Knochenraum ist in diesem Datensatz gleichbedeutend mit dem CT-Raum. - Überprüfen Sie die Posenschätzungen, indem Sie das Skript verifyAssessmentPoses.m auf der Computerplattform öffnen und dann auf Ausführen klicken. Laden Sie die Dateien wie in den Eingabeaufforderungen beschrieben. Das Skript berechnet die spiralförmige Achse zwischen der modell- und markerbasierten Posenschätzung und gibt eine Rotations- und Translationsdifferenz für jedes Bild der verfolgten Daten zurück.
4. Schulung neuer Bediener
HINWEIS: In diesem Abschnitt wird die Schulung mit Feedback für einen neuen Bediener beschrieben. Hier ist Autoscoper die ausgewählte modellbasierte Software zur Posenschätzung, aber auch andere Software könnte als Ersatz verwendet werden.
- Laden Sie die neueste Version der Software zur Posenschätzung herunter unter: https://simtk.org/projects/autoscoper.
- Um lokale BVR-Dateien zu finden, öffnen Sie die Datei in einem Texteditor (.\JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\POINTER_T0019_jog001.cfg). Die Software verwendet eine Zeigerdatei (.cfg), um Dateien zu finden. Ändern Sie die Verzeichnisse so, dass sie zu den entsprechenden lokalen Dateien führen. Speichern Sie die Datei, und schließen Sie sie.
- Um die BVR-Bilder und Kamerainformationen zu laden, öffnen Sie die Posenschätzungssoftware und klicken Sie auf Testversion laden. Navigieren Sie zu der im vorherigen Schritt gespeicherten Zeigerkonfigurationsdatei, und klicken Sie auf Öffnen.
- Um zu verfolgen, befolgen Sie das Protokoll in Akhbari et al.17 (modellbasiertes Tracking). Kurz gesagt, drehen und verschieben Sie den Knochen, indem Sie auf die Achsen auf dem Knochen klicken und ziehen, bis Sie mit der Position und Ausrichtung des Fersenbeins zufrieden sind. Drücken Sie die Taste S auf der Tastatur, um den aktuellen Frame für den Calcaneus (cal) zu speichern.
HINWEIS: Die Filtereinstellungen sind in \JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\ enthalten, die zum Filtern verwendet werden können, wie in Akhbari et al.17 gezeigt. - Um die Dateien zu speichern, klicken Sie auf Tracking speichern. Speichern Sie die Datei als [Testnummer]_[Probandennummer]_[Name der Testversion]_[3-Buchstaben-Bone-Code].tra (z. B. T0019_SOL001A_jog0001_cal.tra) unter dem gewünschten Verzeichnis. Exportieren Sie die Einstellungen als aktuell, matrix, spalte, komma, keine, mm, grad.
HINWEIS: Die aus drei Buchstaben bestehenden Knochencodes für die Tibia und den Talus sind Tib bzw. Tal. - Um Dateien für die Nachverfolgungsgenauigkeit zu erstellen, öffnen Sie die Computerplattform, und führen Sie das Skript animateBonesWithReferences.m im Codeordner aus. Navigieren Sie zu den Ordnern innerhalb des Trainingspakets, wie in den Dialogfeldern angefordert .
HINWEIS: Der Code animateBonesWithReferences.m ist ein spezieller Code für das Training, der die Posen aus markerbasierten Daten als Feedback bereitstellt, um die Nachverfolgung des neuen Operators zu verbessern. - Installieren Sie die Visualisierungssoftware von: https://github.com/DavidLaidlaw/WristVisualizer/tree/master. Um das Tracking zu visualisieren, öffnen Sie die in Schritt 4.6 erstellte .pos-Datei in der Visualisierungssoftware; Der Dateispeicherort befindet sich im Befehlsfenster der Computerplattform.
- Überprüfen Sie die Ausrichtung des verfolgten Bones (grau) am Referenz-Bone. Grün zeigt an, dass sich die Pose innerhalb der Dreh- und Translationsschwellen befindet, während Rot anzeigt, dass sie außerhalb des Schwellenwerts liegt. Fahren Sie mit der Verfolgung und Visualisierung fort, bis alle Frames grün sind. Ändern Sie bei Bedarf die Schwellenwerte (phi - rotation, trans - translation) in den Zeilen 10 und 11 des Skripts animateBonesWithReferences.m.
HINWEIS: Wenn der Referenz-Bone rot ist (Abbildung 3A), bedeutet dies, dass die Pose mehr als 1 mm oder 2° von der markerbasierten Pose entfernt ist, gemessen mit der spiralförmigen Achse. Wenn er grün ist und visuell angemessen ist, wird dieser Frame ausreichend gut verfolgt (Abbildung 3B). - Um die anderen Knochen im Knöchelkomplex zu verfolgen, wiederholen Sie die Schritte 4.4 bis 4.8 für den Talus und die Tibia. Verwenden Sie die Visualisierungssoftware, um sicherzustellen, dass die Bones nicht kollidieren.
- Um die Beurteilung abzuschließen, verfolgen und visualisieren Sie die Tibia, den Talus und den Fersenbein in der Studie, die als Bewertungsversuch bezeichnet wird.
- Öffnen Sie die Computerplattform, und führen Sie den Code animateBonesGeneral.m aus. Navigieren Sie zu den Ordnern innerhalb des Trainingspakets, wie in den Dialogfeldern angefordert . Überprüfen Sie die Knochenposen mithilfe der POS-Datei in der Visualisierungssoftware. Dieser Code ist auf andere Versuche zur 3D-Visualisierung der Knochen verallgemeinerbar.
HINWEIS: Die echte, markerbasierte Pose ist nicht mehr verfügbar. Nur die grauen Knochen sind vorhanden.
- Öffnen Sie die Computerplattform, und führen Sie den Code animateBonesGeneral.m aus. Navigieren Sie zu den Ordnern innerhalb des Trainingspakets, wie in den Dialogfeldern angefordert . Überprüfen Sie die Knochenposen mithilfe der POS-Datei in der Visualisierungssoftware. Dieser Code ist auf andere Versuche zur 3D-Visualisierung der Knochen verallgemeinerbar.
- Um die Posenschätzungen auszuwerten, öffnen Sie das Skript verifyAssessmentPoses.m auf der Computerplattform, und klicken Sie auf Ausführen. Das Skript berechnet die spiralförmige Achse zwischen der modell- und markerbasierten Posenschätzung und gibt eine Rotations- und Translationsdifferenz für jedes Bild der verfolgten Daten zurück. Dadurch wird das gleiche Diagramm wie in animateBoneswithReferences.m erzeugt, aber keine Animation.
- Stellen Sie sicher, dass alle Datenpunkte sowohl für die Drehung als auch für die Verschiebung unter dem ausgewählten Schwellenwert (flache Linie) liegen. Speichern Sie die Ergebnisse bei Bedarf in einer .csv Datei.

Abbildung 3: Visualisierung von akzeptablem und inakzeptablem Tracking. (A) Calcaneus-Knochen, der mit modellbasiertem Tracking verfolgt wurde (grau; auch durch den grauen Pfeil gekennzeichnet), der nicht ausreichend mit der Pose aus der markerbasierten Posenschätzung übereinstimmt (rot; auch durch den roten Pfeil gekennzeichnet). (B) Calcaneus, der ausreichend mit der Pose aus der markerbasierten Posenschätzung übereinstimmt. Der von den Markern verfolgte Calcaneus ist als Ergebnis grün dargestellt (auch durch die grauen und grünen Pfeile gekennzeichnet). Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Ergebnisse
Zwei neue Bediener und ein Experte absolvierten das modellbasierte Training. Die 41 Frames des Assessment-Versuchs maßen die Kompetenz ihres modellbasierten Trackings (Abbildung 4). Die Posenschätzungen der Bediener lagen in der Regel deutlich unter den festgelegten Schwellenwerten. Die mittlere mediane Verzerrung (Bereich) in der Rotation über die Knochen betrug 0,75° (0,69° bis 0,85°) für den Calcaneus, 0,40° (0,37° bis 0,46°) für den Talus und 0,89° (0,76° bis 1,07°) für die Tibia. Die mittlere mediane Translationsverzerrung betrug 0,10 mm (0,05 mm bis 0,16 mm) für den Calcaneus, 0,31 mm (0,22 mm bis 0,41 mm) für den Talus und 0,33 mm (0,27 mm bis 0,37 mm) für die Tibia. Diese Ergebnisse deuten darauf hin, dass das Tutorial effektiv ist, um die Bediener innerhalb einer festgelegten Toleranz zu trainieren.

Abbildung 4: Rotations- und Translationsverzerrung für neue Operatoren und einen Experten. Violin-Plots20 zeigen eine Verzerrung in der (A)(C)(E)-Rotation und der (B)(D)(F)-Translation zwischen modellbasierten und markerbasierten Posenschätzungen für zwei neue Operatoren und einen Experten für den (A)(B) Calcaneus, den (C)(D) Talus und die (E)(F) Tibia. Alle 41 Frames des Bewertungsversuchs werden als Datenpunkte angezeigt, wobei der Median (weißer Kreis), der Interquartilsabstand (dicke vertikale Linie) und der Mittelwert (dicke horizontale Linie) angezeigt werden. Die schwarze Linie bei 2° und 1 mm stellt die ausgewählten Schwellenwerte dar. Sechs Frames außerhalb des Schwellenwerts für den neuen Operator 2 in (E) werden nicht angezeigt. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
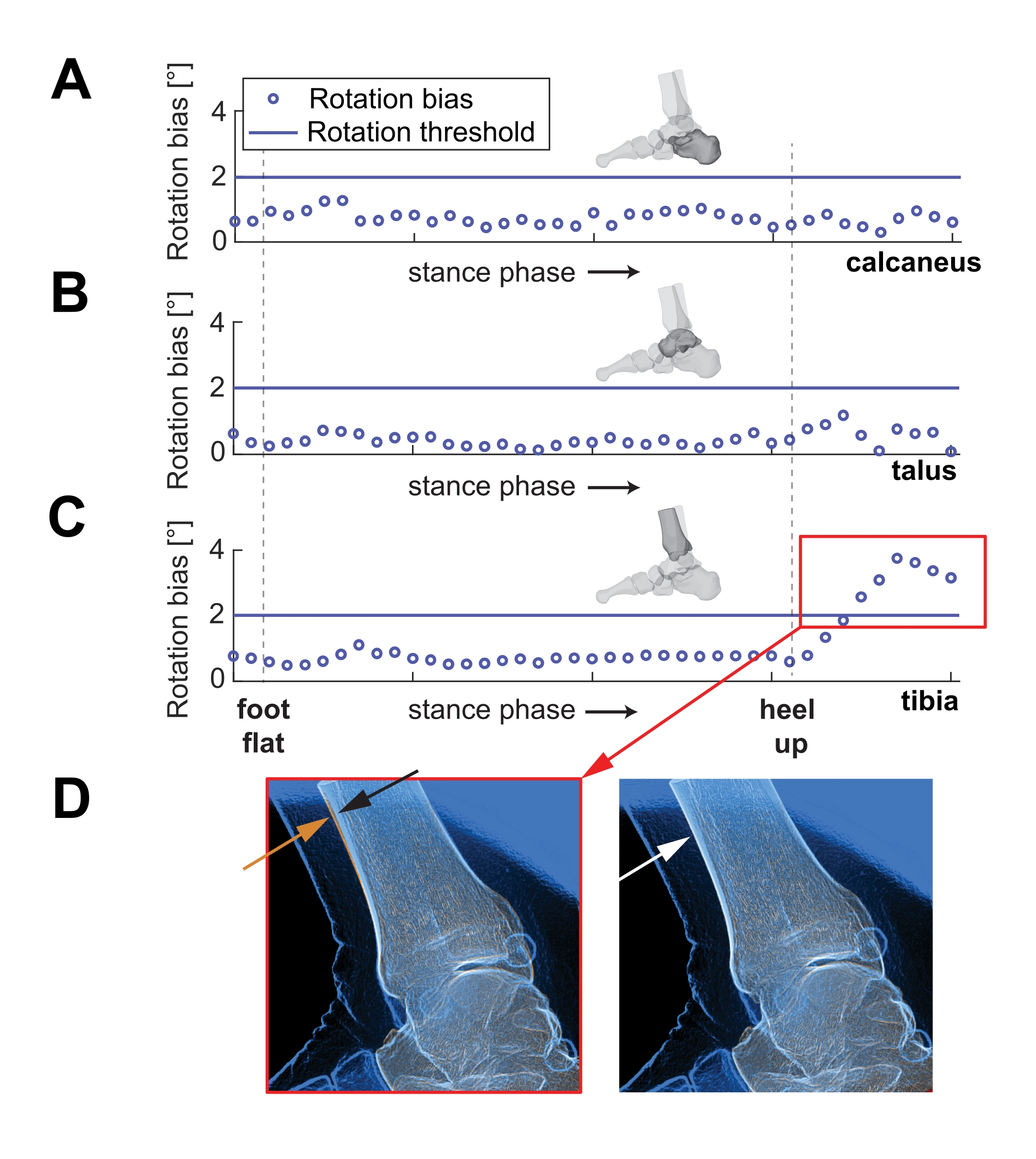
Ein neuer Bediener hatte sechs Frames über der 2°-Rotationsschwelle in seiner Tibia-Nachführung. Die Frames wurden anhand eines der generierten Diagramme in verifyAssessmentPoses.m identifiziert (Abbildung 5). Diese sechs Bilder sind aufgrund des Tibia-Verschlusses durch den anderen Fuß, der durch die Ansicht schwingt, schwieriger zu verfolgen.

Abbildung 5: Rotationsverzerrung für jeden Frame über der Standphase. Beispiel für die Rotationsverfolgung des zweiten neuen Operators über einen Teil der Standphase des Laufens, für (A) den Fersenbein, (B) den Talus und (C) die Tibia. Beachten Sie, dass das rote Feld in (C) die Frames mit hohen Fehlern anzeigt. (D) Auf der linken Seite zeigt ein repräsentatives Bild den ungefähren Unterschied in der Ausrichtung der orangefarbenen und blauen Linien der vorderen Tibia (gekennzeichnet durch orangefarbene und schwarze Pfeile). Das rechte Bild zeigt ein Beispiel für eine gut verfolgte Tibia (gekennzeichnet durch den weißen Pfeil). Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Ergänzende Datei. Bitte klicken Sie hier, um diese Datei herunterzuladen.
Diskussion
Eine genaue modellbasierte Posenschätzung ist von grundlegender Bedeutung für die Messung der Arthrokinematik und der Skelettbewegung. Bisherige Validierungsmethoden zur Posenschätzung basierten auf Leichenproben mit implantierten Markern, ohne in vivo Belastung und Gelenkbewegungsbereich. Dieser in vivo Datensatz des Laufens und Hüpfens mit markerbasierter Posenschätzung ermöglicht die Validierung modellbasierter Algorithmen. Darüber hinaus ist der Datensatz so organisiert, dass neue Operatoren trainiert werden können, so dass die anfängliche Schätzung, die für die meisten modellbasierten Algorithmen erforderlich ist, innerhalb einer festgelegten Toleranz liegt, wodurch die Variabilität zwischen den Operatoren reduziert wird. MATLAB-Code wird so bereitgestellt, dass die Bones animiert werden können und automatisch Feedback zur Pose-Qualität generiert wird.
Die neuen Bediener wurden erfolgreich auf eine festgelegte Toleranz von 2° Drehung und 1 mm Verschiebung trainiert. Diese Grenzwerte sind viel niedriger als die angegebene Zuverlässigkeit zwischen den Bedienern, die bis zu 5 mm und 10°1 betragen kann. Die gewählten Toleranzen sind jedoch 2x bis 4x höher als der RMS-Fehler anderer Experimente mit intakten Leichenfußen (0,59 mm und 0,71°16). Die Toleranzen umfassen die oberen Effektivwert-Fehlerbereiche, stellen aber immer noch eine erhebliche Verbesserung gegenüber der gemeldeten Variabilität zwischen den Bedienern dar. Darüber hinaus sind In-vivo-Bedingungen aufgrund der Variation der Okklusion von Knochen, Weichgewebe und Artefakten der Hochgeschwindigkeitsbewegung durch das Röntgenvolumen schwieriger zu verfolgen als statische Fußhaltungen. Die neuen Bediener führten die Versuche erfolgreich innerhalb der Toleranz durch und lagen nahe an den Ergebnissen des Experten, mit Ausnahme der sechs in Abbildung 5C gezeigten Bilder. Somit stellt die eingestellte Toleranz eine Verbesserung gegenüber der berichteten Variabilität zwischen den Bedienern dar, und die Ergebnisse zeigen, dass diese Methode neue Bediener innerhalb dieser Toleranz erfolgreich trainieren kann.
Ein kritischer Schritt in diesem Protokoll ist die Iteration zwischen Rotoskopie in der ausgewählten Software und Visualisierung in 3D. Diese Iteration ist wichtig, um zu verstehen, wie die Bones im Raum ausgerichtet sind. Es ermöglicht dem Bediener zu überprüfen, ob die Knochenposen biologisch machbar sind und nicht mit anderen Knochen kollidieren. Der kontinuierliche Wechsel zwischen Rotoskopie und Visualisierung verbessert die Qualität der endgültigen Knochenposenschätzungen und hilft, Optimierungsfehler zu erkennen.
Das Trainingsset, insbesondere der Assessment-Test, umfasst herausfordernde Tracking-Szenarien, um die Grenzen der neuen Bediener zu erweitern. Die Position der Röntgenquellen und Bildverstärker in dieser Sammlung führte dazu, dass der schwingende Fuß die Ansichten verdeckte, was zu Herausforderungen bei der Ausrichtung der Knochenmodelle führte. Der neue Operator, bei dem mehrere Frames über der Rotationsschwelle lagen, wurde durch den kontralateralen Fuß beeinträchtigt, der die Sicht verdeckte. Strategien wie das Ändern der Filtereinstellungen und das Rotoskopieren der Frames unmittelbar vor und nach der Okklusion können dazu beitragen, diese Probleme zu mildern. Darüber hinaus unterscheidet sich die Ausrichtung der Koordinatensysteme zwischen den DICOMs und der Posenschätzungssoftware ausreichend, was zu einer Winkelumkehr in der Tibia führt. Die Bediener müssen an dieser Stelle jedes Bild verfolgen, um diese Herausforderung zu meistern. Diese Szenarien sind bei Datenerhebungen keine Seltenheit und stellen Herausforderungen dar, die die automatische modellbasierte Posenschätzung in Zukunft bewältigen soll und stellen somit eine wertvolle Ergänzung zu diesem Datensatz dar.
Es gibt bestimmte Einschränkungen bei diesem Protokoll. Erstens ist die Deklaration der markerbasierten Posenschätzung als Goldstandard umstritten, da der Genauigkeitsunterschied zwischen marker- und modellbasierter Posenschätzung in der Regel nicht um eine Größenordnung von 2,3,10 unterschiedlich ist. Es ist jedoch wahrscheinlich, dass die visuellen Veränderungen in BVR-Bildern, die bei In-vivo-Sammlungen auftreten (d. h. Bewegungsartefakt, Weichgewebe und Knochenokklusion), im Vergleich zu markerbasierten Methoden eher zu Fehlern bei der modellbasierten Posenschätzung führen. Weitere Experimente sind erforderlich, um diese Hypothese zu bestätigen. Darüber hinaus erfasst dieser Datensatz nicht jede biplanare Röntgensammlung. Die Ausrichtung der Kameras, so dass sich die Bones in unterschiedlichen relativen Positionen befinden, könnte die Prominenz der Knochenmerkmale ändern und sich entsprechend auf die Kostenfunktion des Posenabgleichsalgorithmus auswirken. Ferner können diese Funktionen durch die Bildfiltereinstellungen15,17 beeinträchtigt werden. Daher handelt es sich bei diesem Datensatz nicht unbedingt um eine verallgemeinerbare Bewertung der BVR-Genauigkeit. Stattdessen handelt es sich um ein Werkzeug, mit dem Benutzer darin geschult werden können, geeignete anfängliche Posenschätzungen einzugeben, und um modellbasierte Algorithmen zur Posenschätzung zu verbessern, bis manuell rotoskopierte anfängliche Schätzungen nicht mehr erforderlich sind.
Offenlegungen
Die Autoren haben keine Interessenkonflikte offenzulegen.
Danksagungen
Diese Arbeit wurde durch den NSERC Discovery Grant (RGPIN/04688-2015) und den Ontario Early Researcher Award finanziert.
Materialien
| Name | Company | Catalog Number | Comments |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper; pose estimation software | |
| Code | Queen's University | https://github.com/skelobslab/JOVE_BVR_FootModelAndMarker Based | |
| Content-Aware Fill algorithm, Photoshop | Adobe | ||
| Dataset | Queen's University | Download here | |
| MATLAB | Mathworks | n/a | computing platform |
| Mimics | Materialise, Belgium | 3D image processing software | |
| Revolution HD | General Electric Medical Systems | CT scan device used | |
| WristVisualizer | Brown University | https://github.com/DavidLaidlaw/WristVisualizer/tree/master; Visualization software | |
| XMALab | Brown University | https://bitbucket.org/xromm/xmalab/src/master/ |
Referenzen
- Maharaj, J. N., et al. The reliability of foot and ankle bone and joint kinematics measured with biplanar videoradiography and manual scientific rotoscoping. Frontiers in Bioengineering and Biotechnology. 8 (106), (2020).
- Iaquinto, J. M., et al. Model-based tracking of the bones of the foot: A biplane fluoroscopy validation study. Computers in Biology and Medicine. 92, 118-127 (2018).
- Miranda, D. L., et al. Static and dynamic error of a biplanar videoradiography system using marker-based and markerless tracking techniques. Journal of Biomechanical Engineering. 133 (12), 121002 (2011).
- Tashman, S., Anderst, W. In-vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of Experimental Zoology Part A: Ecological Genetics and Physiology. 313 (5), 262-279 (2010).
- Challis, J. H. A procedure for determining rigid body transformation parameters. Journal of Biomechanics. 28 (6), 733-737 (1995).
- Lundberg, A., Goldie, I., Kalin, B. O., Selvik, G. Kinematics of the ankle/foot complex: plantarflexion and dorsiflexion. Foot & ankle. 9 (4), 194-200 (1989).
- You, B. -. M., Siy, P., Anderst, W., Tashman, S. In vivo measurement of 3-D skeletal kinematics from sequences of biplane radiographs: Application to knee kinematics. IEEE Transactions on Medical Imaging. 20 (6), 514-525 (2001).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a new model-based tracking technique for measuring three-dimensional, in vivo glenohumeral joint kinematics. Journal of Biomechanical Engineering. 128 (4), 604-609 (2006).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of three-dimensional model-based tibio-femoral tracking during running. Medical Engineering & Physics. 31 (1), 10-16 (2009).
- Martin, D. E., et al. Model-based tracking of the hip: implications for novel analyses of hip pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Massimini, D. F. Non-invasive determination of coupled motion of the scapula and humerus-An in-vitro validation. Journal of Biomechanics. 44 (3), 408-412 (2011).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8 (1), 1-10 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Cross, J. A., et al. Biplane fluoroscopy for hindfoot motion analysis during gait: A model-based evaluation. Medical Engineering & Physics. 43, 118-123 (2017).
- Akhbari, B., Morton, A. M., Moore, D. C., Crisco, J. J. Biplanar videoradiography to study the wrist and distal radioulnar joints. JoVE Journal of Visualized Experiments. (168), e62102 (2021).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM). Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Söderkvist, I., Wedin, P. -. &. #. 1. 9. 7. ;. Determining the movements of the skeleton using well-configured markers. Journal of Biomechanics. 26 (12), 1473-1477 (1993).
- Violin Plots for Matlab. Available from: https://github.com/bastibe/Violinplot-Matlab (2021)
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten