
Method Article
Ensemble de données de vidéoradiographie biplanaire pour le développement de l’estimation de la pose basée sur un modèle et la formation de nouveaux utilisateurs
Dans cet article
Résumé
Ce travail présente un ensemble de données in vivo avec des poses osseuses estimées à l’aide de méthodes basées sur des marqueurs. Une méthode est incluse ici pour former les opérateurs à améliorer leurs estimations initiales pour l’estimation de pose basée sur un modèle et à réduire la variabilité entre les opérateurs.
Résumé
La mesure du mouvement des petits os du pied est essentielle pour comprendre la perte pathologique de fonction. La vidéoradiographie biplanaire est bien adaptée pour mesurer le mouvement osseux in vivo , mais des défis se posent lors de l’estimation de la rotation et de la translation (pose) de chaque os. La pose de l’os est généralement estimée à l’aide de méthodes basées sur des marqueurs ou des modèles. Les méthodes basées sur des marqueurs sont très précises mais peu courantes in vivo en raison de leur caractère invasif. Les méthodes basées sur des modèles sont plus courantes, mais sont actuellement moins précises car elles reposent sur les entrées de l’utilisateur et des algorithmes spécifiques au laboratoire. Ce travail présente un ensemble de données in vivo rares sur les poses du calcanéum, du talus et du tibia, mesurées à l’aide de méthodes basées sur des marqueurs pendant la course et le saut. Une méthode est incluse pour former les utilisateurs à améliorer leurs suppositions initiales dans un logiciel d’estimation de pose basé sur un modèle, en utilisant un retour visuel basé sur des marqueurs. De nouveaux opérateurs ont été en mesure d’estimer les poses osseuses à moins de 2° de la rotation et à 1 mm de translation de la pose basée sur le marqueur, comme un utilisateur expert du logiciel basé sur le modèle, et représentant une amélioration substantielle par rapport à la variabilité inter-opérateurs précédemment rapportée. De plus, cet ensemble de données peut être utilisé pour valider d’autres logiciels d’estimation de pose basés sur un modèle. En fin de compte, le partage de cet ensemble de données améliorera la vitesse et la précision avec lesquelles les utilisateurs peuvent mesurer les poses osseuses à partir de la vidéoradiographie biplanaire.
Introduction
La mesure du mouvement des petits os du pied est essentielle pour comprendre la perte pathologique de fonction. Cependant, la mesure dynamique du mouvement osseux du pied est difficile en raison de la petite taille et de la configuration densément tassée des os et des articulations 1,2. La technologie de vidéoradiographie biplanaire (BVR) est bien adaptée pour mesurer le mouvement tridimensionnel (3D) in vivo des petits os du pied et de la cheville lors d’activités dynamiques. La BVR fournit des informations sur l’arthro-cinématique en utilisant deux sources de rayons X couplées à des intensificateurs d’image, qui convertissent les rayons X du mouvement dynamique en lumière visible. Au fur et à mesure que le pied se déplace dans le volume de capture, des caméras à grande vitesse capturent les images. Les images ne sont pas déformées et projetées dans le volume de capture à l’aide des positions de caméra calibrées 3,4. Les six degrés de liberté (6 d.o.f.) de la pose osseuse (3 d.o.f. pour la position et 3 d.o.f. pour l’orientation) sont ensuite estimés à l’aide de méthodes basées sur des marqueurs ou sur des modèles3.
Les méthodes d’estimation de la pose basées sur des marqueurs ou des modèles varient selon les laboratoires et les disciplines. L’étalon-or de la mesure dynamique de la pose BVR est l’implantation de petits marqueurs de tantale dans l’os d’intérêt 4,5. Un minimum de trois marqueurs par os est nécessaire pour estimer la pose, avec des marqueurs supplémentaires conduisant à une plus grande précision 5,6. Cette méthode est moins courante in vivo en raison de son caractère invasif, car elle nécessite une implantation chirurgicale, et les marqueurs sont ensuite intégrés de manière permanente dans l’os7. Alternativement, le suivi basé sur le modèle utilise des informations volumétriques provenant d’autres modalités d’imagerie, telles que la tomodensitométrie (TDM) ou l’imagerie par résonance magnétique, pour recréer le modèle sur les images BVR 2,3,8,9,10,11,12,13,14,15 . Le modèle est ensuite manipulé semi-manuellement pour correspondre au mieux aux images (rotoscopie), généralement en utilisant une combinaison d’entrées de l’utilisateur comme estimation initiale et d’optimisation corrélative croisée 3,8,9,10,15. L’estimation de la pose basée sur un modèle est moins invasive, et donc plus courante, mais a un temps de traitement plus long et nécessite une intervention de l’utilisateur. Comme le processus de rotoscopie est actuellement semi-manuel, il reste nécessaire de former de manière fiable les opérateurs dans le logiciel spécifique au laboratoire, car les erreurs quadratiques moyennes (RMS) entre opérateurs peuvent varier de 0,83 mm à 4,96 mm et de 0,58° à 10,29° le long ou autour d’un seul axe1. De plus, les algorithmes d’appariement de modèles s’améliorent, mais nécessitent une validation à l’aide de paradigmes expérimentaux aussi proches que possible des conditions in vivo.
La précision des estimations de pose basées sur un modèle est souvent évaluée par rapport à des mesures basées sur des marqueurs. Par exemple, des pieds cadavériques humains implantés avec des marqueurs ont été déplacés à travers des positions locomotrices simulées 13,14,16. Les images BVR capturées sont ensuite transmises à la méthode de rotoscopie basée sur le modèle et comparées aux mesures basées sur les marqueurs pour l’exactitude (biais et précision). Bien que l’utilisation d’un pied de cadavre statique soit une approche précieuse, elle présente des limites dans l’évaluation de la précision de la pose osseuse in vivo. Par exemple, les positions articulaires sont relativement constantes chez un pied de cadavre avec l’absence d’activité musculaire et de charges in vivo. Ainsi, il peut ne pas représenter les limites du mouvement articulaire dans diverses tâches locomotrices. Les variations de la posture articulaire modifient l’occlusion dans les images BVR, ce qui est une source d’erreur de mesure lors de l’estimation de petites poses osseuses du pied densément tassées13. De plus, lors de l’utilisation d’algorithmes de correspondance d’images, la présence de marqueurs dans les images BVR biaiserait probablement les résultats. Bien que des groupes aient supprimé les marqueurs des images DICOM (TDM) d’imagerie numérique et de communication en médecine (TDM) 9,14,16, ils ne sont également supprimés qu’occasionnellement des images de vidéoradiographie biplanaire16.
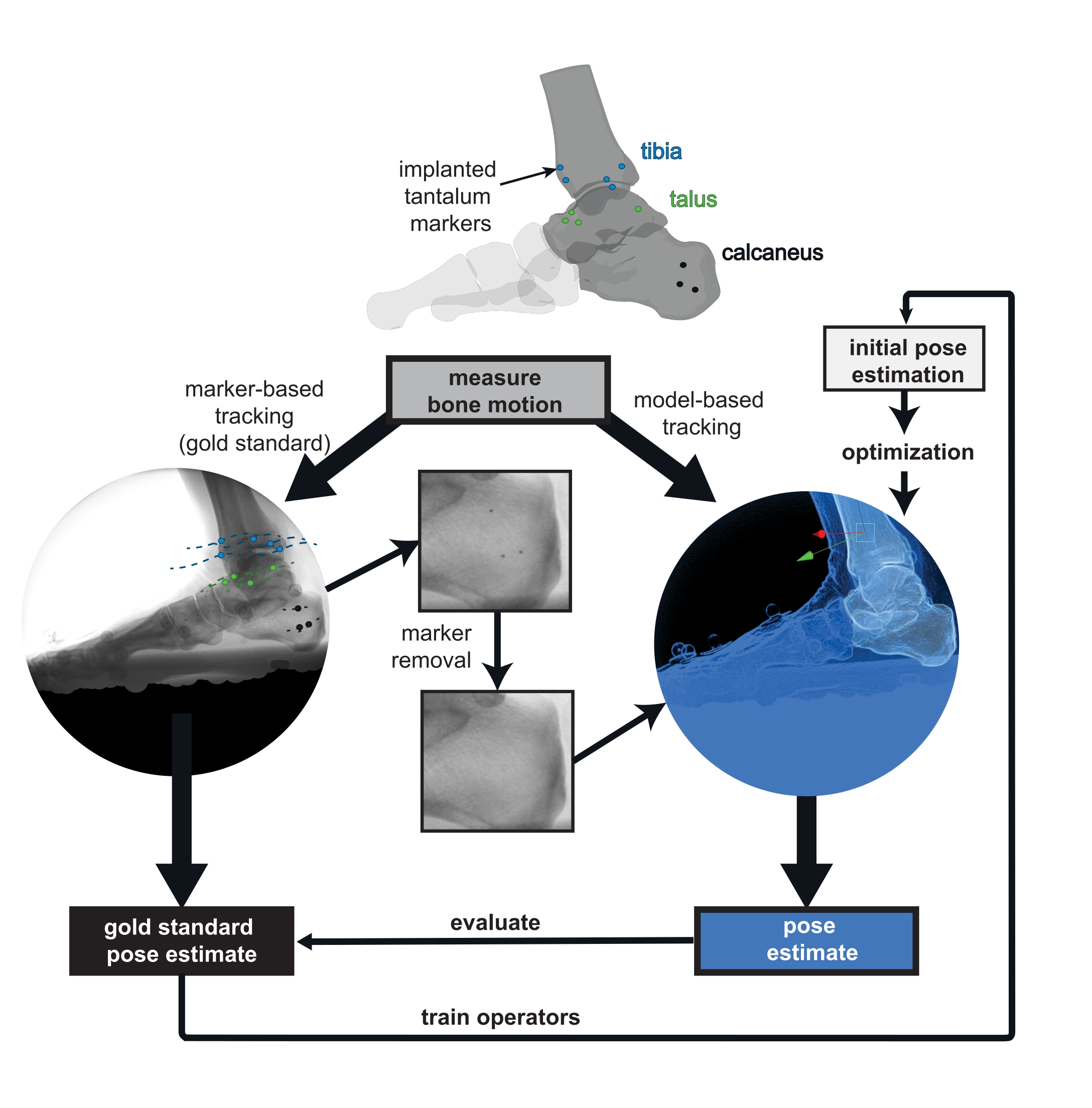
Ce travail présente un ensemble de données BVR open source d’un participant sautillant et courant in vivo, dont les marqueurs sont implantés dans les os de son pied et de sa cheville (Figure 1). Une estimation de la pose basée sur des marqueurs pour le mouvement osseux in vivo du tibia, du talus et du calcanéum est fournie. Les marqueurs ont été retirés des images radiographiques et tomodensitométriques afin de limiter tout biais introduit lors de l’évaluation de la précision du suivi basé sur le modèle. Cet ensemble de données est destiné à évaluer la précision de tout logiciel d’estimation de pose basé sur un modèle, et à améliorer la sélection des estimations initiales de pose pour les processus semi-manuels. Il est le plus approprié pour les personnes qui visent à améliorer la vitesse et la précision du pipeline de traitement d’images BVR, et pour les laboratoires qui souhaitent une faible variabilité inter-opérateurs dans l’estimation de la pose initiale.

Figure 1 : Vue d’ensemble de l’ensemble de données de vidéoradiographie biplanaire (BVR) fourni. Les marqueurs implantés sont suivis in vivo comme l’étalon-or pour l’estimation de la pose osseuse. Les marqueurs ont été retirés numériquement des images BVR et des tomodensitométries afin d’éviter tout biais dans le suivi basé sur le modèle. Les poses estimées à partir de n’importe quel logiciel de suivi basé sur le modèle peuvent être comparées à l’étalon-or du suivi basé sur les marqueurs. L’estimation de la pose basée sur les marqueurs peut également être utilisée pour former de nouveaux opérateurs afin d’améliorer leur estimation initiale de la pose osseuse pour le suivi basé sur un modèle. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Protocole
Les protocoles expérimentaux ont été approuvés par le comité d’éthique de la recherche des sciences de la santé de l’Université Queen’s et des hôpitaux d’enseignement affiliés. Le participant a donné son consentement éclairé avant de participer à la collecte de données.
1. Préparation des patients et génération de jeux de données
REMARQUE : Le participant (homme, 49 ans, 83 kg, 1,75 m) avait plusieurs marqueurs de tantale de 0,8 mm de diamètre préalablement implantés dans le calcanéum (3 marqueurs), le talus (4 marqueurs) et le tibia (5 marqueurs ; Figure 1).
- Acquérir une tomodensitométrie avec un algorithme de réduction des artefacts métalliques (pour réduire la distorsion de l’image due aux implants métalliques) sur le pied du participant dans une posture de cheville en flexion plantaire maximale avec une taille de pixel de 0,500 mm ou moins, et une épaisseur de tranche de 0,625 mm ou moins.
REMARQUE : Ici, le pied droit du participant a été scanné à une résolution de 0,441 mm x 0,441 mm x 0,625 mm. L’emplacement des marqueurs n’est pas placé à des endroits anatomiques spécifiques dans l’os4 ; Au lieu de cela, ils sont répartis dans tout l’os5. - Pour les méthodes de collecte de la vidéoradiographie biplanaire et de traitement détaillé des données, voir17. Brièvement, demandez au participant d’effectuer le mouvement souhaité, avec sa position de départ organisée de manière à ce que son pied atterrisse dans le volume de vidéoradiographie biplanaire. Utilisez un objet d’étalonnage et des grilles de déformation pour localiser les caméras et déformer les images, respectivement18.
REMARQUE : Le participant à cette étude a effectué des essais de deux mouvements différents. Ils ont sauté sur un métronome à 108 bpm et ont couru lentement dans le volume. Les images ont été capturées en continu à 250 Hz avec une vitesse d’obturation de 1111 μs, et le système à rayons X a été réglé sur 70 kV et 100 mA. - Segmentez individuellement les marqueurs à l’aide d’un logiciel de traitement d’images médicales 3D. À l’aide de l’algorithme de remplissage sensible au contenu de l’éditeur de graphiques raster et des emplacements de marqueurs connus, supprimez les marqueurs des images DICOM. Créez les volumes partiels osseux et les maillages tessellés en segmentant les images sans marqueur, comme illustré à la17. Alignez à la fois les volumes partiels et les mailles et stockez-les dans l’espace CT.
- Pour chaque image, compilez les coordonnées d’image x-y non filtrées de chaque marqueur dans XMALab et exportez-les18. Triangulez les coordonnées 3D à l’aide de la boîte à outils de vision par ordinateur dans MATLAB. Estimez la pose en faisant correspondre les positions des marqueurs 3D dans l’espace des rayons X aux centroïdes ajustés aux sphères dans l’espace CT en utilisant une approche des moindres carrés19. Utilisez le même algorithme dans l’éditeur de graphiques matriciels pour supprimer les marqueurs des images radiographiques afin de les préparer au suivi.
2. Accéder à l’ensemble de données et au code
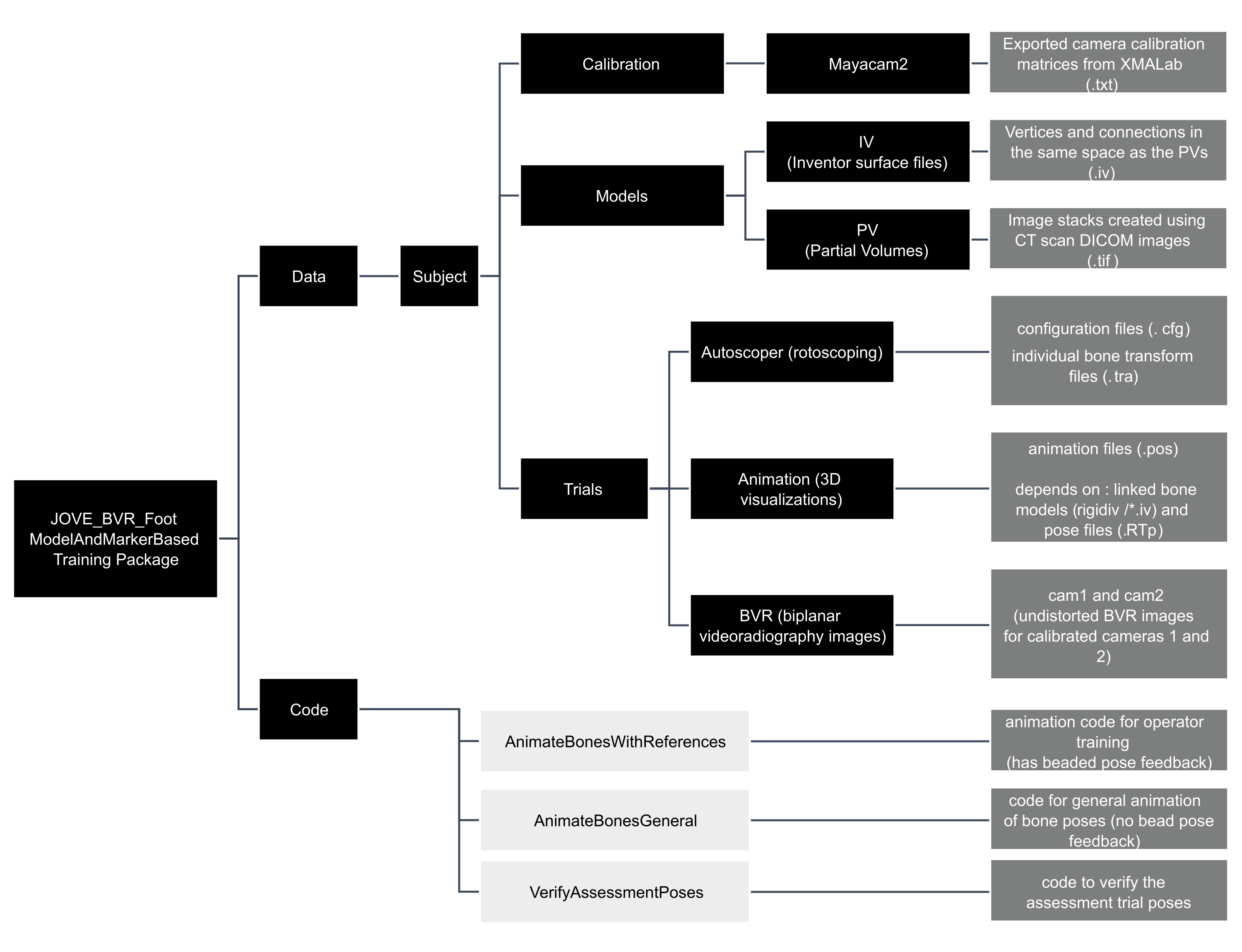
- Téléchargez l’ensemble de données ici. Il existe des images BVR et des fichiers d’étalonnage pour chaque essai, ainsi que des estimations de pose de référence enregistrées au format .tra (Figure 2). Téléchargez/clonez le paquet de code à partir de : https://github.com/skelobslab/JOVE_BVR_FootModelAndMarkerBased.

Figure 2 : Arborescence des données du package de formation JOVE_BVR_Foot_ModelAndMarkerBased. Les dossiers sont affichés dans des cases noires, le code est affiché dans des cases gris clair et les descriptions des fichiers sont contenues dans des cases gris foncé. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
3. Évaluez la précision de l’algorithme de suivi de modèle
- Enregistrez les estimations de pose sous forme de fichier .tra dans le dossier de référence de l’essai. Organisez le fichier .tra avec la pose de l’espace osseux à l’espace radiographique écrite dans un format de 1 rangée x 16 colonnes, chaque ligne correspondant à l’image et la matrice de pose 4 x 4 écrite comme [première colonne, deuxième colonne, troisième colonne et quatrième colonne].
REMARQUE : L’espace osseux est synonyme d’espace CT dans cet ensemble de données. - Vérifiez les estimations de pose en ouvrant le script verifyAssessmentPoses.m dans la plate-forme informatique, puis en cliquant sur Exécuter. Chargez les fichiers comme décrit par les invites. Le script calcule l’axe hélicoïdal entre l’estimation de la pose basée sur le modèle et le marqueur et renvoie une différence de rotation et de translation pour chaque image de données suivies.
4. Formation des nouveaux opérateurs
REMARQUE : Cette section décrit la formation avec rétroaction pour un nouvel opérateur. Ici, Autoscoper est le logiciel d’estimation de pose basé sur le modèle sélectionné, mais d’autres logiciels peuvent être utilisés en remplacement.
- Téléchargez la dernière version du logiciel d’estimation de pose à partir de : https://simtk.org/projects/autoscoper.
- Pour localiser les fichiers BVR locaux, ouvrez-les dans un éditeur de texte (.\JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\POINTER_T0019_jog001.cfg). Le logiciel utilise un fichier pointeur (.cfg) pour localiser les fichiers. Modifiez les répertoires pour qu’ils mènent aux fichiers locaux appropriés. Enregistrez le fichier et fermez-le.
- Pour charger les images BVR et les informations de l’appareil photo, ouvrez le logiciel d’estimation de pose et cliquez sur Charger l’essai. Accédez au fichier de configuration du pointeur enregistré à l’étape précédente et cliquez sur Ouvrir.
- Pour suivre, suivez le protocole d’Akhbari et al17 (suivi basé sur un modèle). En bref, faites pivoter et transférez l’os en cliquant et en faisant glisser les axes sur l’os jusqu’à ce que vous soyez satisfait de la position et de l’orientation du calcanéum. Appuyez sur la touche S du clavier pour enregistrer l’image actuelle du calcanéum (cal).
REMARQUE : Les paramètres de filtrage sont inclus dans \JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\ qui peut être utilisé pour le filtrage comme indiqué dans Akhbari et al17. - Pour enregistrer les fichiers, cliquez sur Enregistrer le suivi. Enregistrez le fichier sous le nom [Numéro de l’essai]_[Numéro du sujet]_[Nom de l’essai]_[Code d’os à 3 lettres].tra (par exemple, T0019_SOL001A_jog0001_cal.tra) dans le répertoire de votre choix. Exportez les paramètres sous forme de courant, matrice, colonne, virgule, aucun, mm, degrés.
REMARQUE : Les codes osseux à trois lettres pour le tibia et le talus sont tib et tal, respectivement. - Pour créer des fichiers de suivi précis, ouvrez la plate-forme informatique et exécutez le script animateBonesWithReferences.m dans le dossier code. Accédez aux dossiers du package de formation comme demandé par les boîtes de dialogue.
REMARQUE : Le code animateBonesWithReferences.m est un code spécialisé pour l’entraînement qui fournit les poses à partir de données basées sur des marqueurs en retour d’information afin d’améliorer le suivi du nouvel opérateur. - Installez le logiciel de visualisation à partir de : https://github.com/DavidLaidlaw/WristVisualizer/tree/master. Pour visualiser le suivi, ouvrez le fichier .pos créé à l’étape 4.6 dans le logiciel de visualisation ; L’emplacement de son fichier se trouve dans la fenêtre de commande de la plate-forme informatique.
- Vérifiez l’alignement de l’os suivi (gris) avec l’os de référence. La couleur verte indique que la pose se trouve dans les seuils de rotation et de translation, tandis que le rouge indique qu’elle est en dehors du seuil. Continuez le suivi et la visualisation jusqu’à ce que tous les cadres soient verts. Modifiez les seuils (phi - rotation, trans - traduction) dans les lignes 10 et 11 du script animateBonesWithReferences.m, si nécessaire.
REMARQUE : Si l’os de référence est rouge (Figure 3A), cela signifie que la pose est à plus de 1 mm ou 2° de la pose basée sur le marqueur, mesurée à l’aide de l’axe hélicoïdal. S’il est vert et que cela est visuellement raisonnable, ce cadre est suffisamment bien suivi (figure 3B). - Pour suivre les autres os du complexe de la cheville, répétez les étapes 4.4 à 4.8 pour le talus et le tibia. Utilisez le logiciel de visualisation pour vous assurer que les os n’entrent pas en collision.
- Pour terminer l’évaluation, suivez et visualisez le tibia, le talus et le calcanéum dans l’essai appelé essai d’évaluation.
- Ouvrez la plate-forme informatique et exécutez le code animateBonesGeneral.m. Accédez aux dossiers du package de formation comme demandé par les boîtes de dialogue. Vérifiez les poses osseuses à l’aide du fichier .pos dans le logiciel de visualisation. Ce code est généralisable à d’autres essais pour la visualisation 3D des os.
REMARQUE : La vraie pose basée sur un marqueur ne sera plus disponible. Seuls les os gris seront présents.
- Ouvrez la plate-forme informatique et exécutez le code animateBonesGeneral.m. Accédez aux dossiers du package de formation comme demandé par les boîtes de dialogue. Vérifiez les poses osseuses à l’aide du fichier .pos dans le logiciel de visualisation. Ce code est généralisable à d’autres essais pour la visualisation 3D des os.
- Pour évaluer les estimations de pose, ouvrez le script verifyAssessmentPoses.m dans la plate-forme informatique et cliquez sur Exécuter. Le script calcule l’axe hélicoïdal entre l’estimation de la pose basée sur le modèle et le marqueur et renvoie une différence de rotation et de translation pour chaque image de données suivies. Cela produira le même graphique que dans animateBoneswithReferences.m, mais ne produira pas d’animation.
- Vérifiez que tous les points de données sont en dessous du seuil sélectionné (ligne plate) pour la rotation et la translation. Enregistrez les résultats dans un fichier .csv, si nécessaire.

Figure 3 : Visualisation du suivi acceptable et inacceptable. (A) Os du calcanéum suivi à l’aide d’un suivi basé sur un modèle (gris ; également indiqué par la flèche grise) qui ne correspond pas suffisamment à la pose de l’estimation de la pose basée sur le marqueur (rouge ; également indiqué par la flèche rouge). (B) Calcanéum qui correspond suffisamment à la pose de l’estimation de la pose basée sur le marqueur. Le calcanéum à traces de marqueurs est représenté en vert (également indiqué par les flèches grises et vertes). Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Résultats
Deux nouveaux opérateurs et un expert ont suivi la formation basée sur des modèles. Les 41 trames de l’essai d’évaluation ont mesuré la compétence de leur suivi basé sur un modèle (Figure 4). Les estimations de pose des opérateurs étaient généralement bien inférieures aux seuils définis. Le biais médian moyen (plage) en rotation à travers les os était de 0,75° (0,69° à 0,85°) pour le calcanéum, de 0,40° (0,37° à 0,46°) pour l’éboulis et de 0,89° (0,76° à 1,07°) pour le tibia. Le biais de translation médian moyen était de 0,10 mm (0,05 mm à 0,16 mm) pour le calcanéum, de 0,31 mm (0,22 mm à 0,41 mm) pour le talus et de 0,33 mm (0,27 mm à 0,37 mm) pour le tibia. Ces résultats suggèrent que le tutoriel est efficace pour former les opérateurs à respecter une tolérance définie.

Figure 4 : Biais de rotation et de translation pour de nouveaux opérateurs et un expert. Les graphiquesde violon 20 montrent un biais dans la rotation (A)(C)(E) et la traduction (B)(D)(F) entre les estimations de pose basées sur le modèle et basées sur les marqueurs pour deux nouveaux opérateurs et un expert pour le calcanéum (A)(B), le talus (C)(D) et le tibia (E)(F). Les 41 bases de sondage de l’essai d’évaluation sont présentées sous forme de points de données, avec la médiane (cercle blanc), l’écart interquartile (ligne verticale épaisse) et la moyenne (ligne horizontale épaisse). La ligne noire à 2° et 1 mm représente les seuils sélectionnés. Six images en dehors du seuil pour le nouvel opérateur 2 en (E) ne sont pas affichées. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
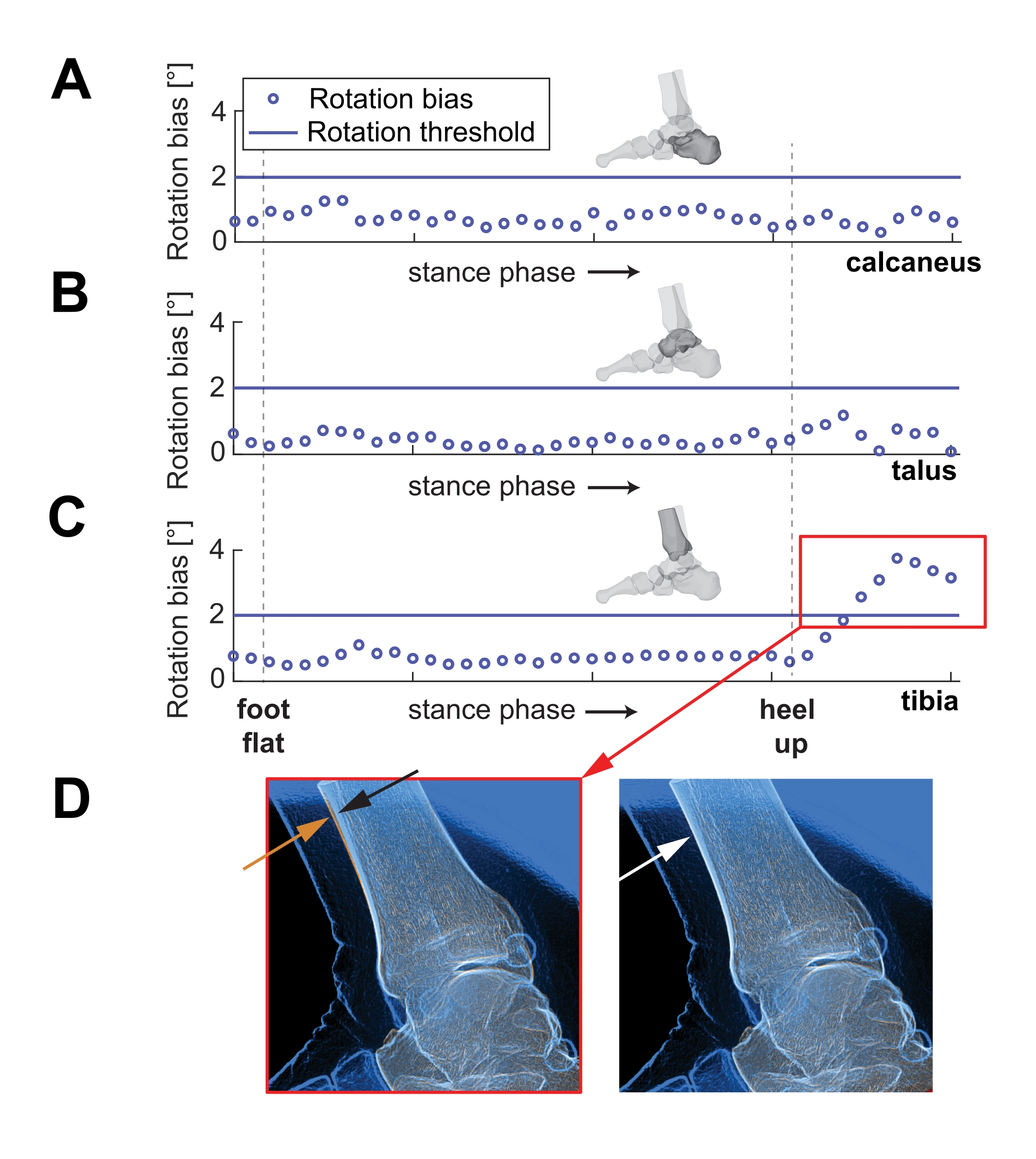
Un nouvel opérateur avait six cadres au-dessus du seuil de rotation de 2° dans le suivi du tibia. Les trames ont été identifiées à l’aide de l’un des graphiques générés dans verifyAssessmentPoses.m (Figure 5). Ces six images sont plus difficiles à suivre en raison de l’occlusion du tibia par l’autre pied qui se balance dans la vue.

Figure 5 : Biais de rotation pour chaque image sur la phase d’appui. Exemple de suivi de la rotation du deuxième nouvel opérateur sur une partie de la phase d’appui de la course, pour (A) le calcanéum, (B) le talus et (C) le tibia. Notez que la case rouge en (C) montre les images avec des erreurs élevées. (D) À gauche, une image représentative montre la différence approximative d’alignement des lignes orange et bleue du tibia antérieur (indiquée par des flèches orange et noire). L’image de droite montre un exemple de tibia bien suivi (indiqué par la flèche blanche). Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Dossier supplémentaire. Veuillez cliquer ici pour télécharger ce fichier.
Discussion
L’estimation précise de la pose basée sur un modèle est fondamentale pour mesurer l’arthrocinématique et le mouvement squelettique. Les méthodes de validation précédentes pour l’estimation de la pose étaient basées sur des échantillons cadavériques avec des marqueurs implantés, sans charge in vivo et amplitudes de mouvement articulaires. Cet ensemble de données in vivo de course et de saut avec estimation de pose basée sur des marqueurs permet de valider des algorithmes basés sur des modèles. De plus, l’ensemble de données est organisé pour former de nouveaux opérateurs, de sorte que l’estimation initiale requise pour la plupart des algorithmes basés sur un modèle se situe dans une tolérance définie, ce qui réduit la variabilité entre les opérateurs. Le code MATLAB est fourni de manière à ce que les os puissent être animés et que des commentaires sur la qualité de la pose soient automatiquement générés.
Les nouveaux opérateurs ont été formés avec succès à une tolérance de rotation de 2° et une translation de 1 mm. Ces limites sont bien inférieures à la fiabilité inter-opérateurs signalée, qui peut atteindre 5 mm et 10°1. Cependant, les tolérances sélectionnées sont de 2 à 4 fois plus élevées que l’erreur RMS d’autres expériences de pieds cadavériques intacts (0,59 mm et 0,71°16). Les tolérances incluent les plages supérieures d’erreur RMS, mais représentent tout de même une amélioration substantielle par rapport à la variabilité signalée entre les opérateurs. De plus, les conditions in vivo sont plus difficiles à suivre que les postures statiques du pied en raison de la variation de l’occlusion des os, des tissus mous et des artefacts de mouvement à grande vitesse à travers le volume de rayons X. Les nouveaux opérateurs ont réussi à rotoscopiser les essais dans les limites de la tolérance et ont été proches des résultats de l’expert, à l’exception des six cadres illustrés à la figure 5C. Ainsi, la tolérance définie représente une amélioration par rapport à la variabilité inter-opérateurs rapportée, et les résultats montrent que cette méthode peut former avec succès de nouveaux opérateurs dans le cadre de cette tolérance.
Une étape critique de ce protocole est l’itération entre la rotoscopie dans le logiciel sélectionné et la visualisation en 3D. Cette itération est importante pour comprendre comment les os sont orientés dans l’espace. Il permet à l’opérateur de vérifier si les poses osseuses sont biologiquement réalisables et ne heurtent pas d’autres os. L’alternance continue entre la rotoscopie et la visualisation améliore la qualité des estimations finales de la pose osseuse et permet de détecter les erreurs d’optimisation.
L’ensemble de formations, en particulier l’essai d’évaluation, comprend des scénarios de suivi stimulants pour repousser les limites des nouveaux opérateurs. La position des sources de rayons X et des intensificateurs d’image dans cette collection faisait en sorte que le pied oscillant obstruait les vues, créant des défis pour l’alignement des modèles osseux. Le nouvel opérateur, avec plusieurs cadres au-dessus du seuil de rotation, a été affecté par le pied controlatéral qui masquait la vue. Des stratégies telles que la modification des paramètres de filtre et la rotoscopie des images immédiatement avant et après l’occlusion peuvent aider à atténuer ces problèmes. De plus, l’orientation des systèmes de coordonnées diffère suffisamment entre les DICOM et le logiciel d’estimation de pose, provoquant un retournement d’angle dans le tibia. Les opérateurs doivent suivre chaque image à ce stade pour surmonter ce défi. Ces scénarios ne sont pas rares dans les collectes de données et représentent des défis que l’estimation automatique de la pose basée sur un modèle devrait relever à l’avenir et constituent donc un ajout précieux à cet ensemble de données.
Il existe certaines limitations avec ce protocole. Tout d’abord, déclarer l’estimation de la pose basée sur le marqueur comme l’étalon-or est controversée car la différence de précision entre l’estimation de la pose basée sur le marqueur et l’estimation de la pose basée sur le modèle n’est généralement pas d’un ordre de grandeur différent 2,3,10. Cependant, il est probable que les changements visuels dans les images BVR qui surviennent avec les collections in vivo (c.-à-d. artefact de mouvement, tissus mous et occlusion osseuse) sont plus susceptibles d’induire des erreurs dans l’estimation de la pose basée sur le modèle que dans les méthodes basées sur les marqueurs. D’autres expériences sont nécessaires pour confirmer cette hypothèse. De plus, cet ensemble de données ne capture pas toutes les collections de radiographies biplanaires. L’orientation des caméras, de sorte que les os soient dans des positions relatives différentes, pourrait modifier la proéminence des caractéristiques osseuses et affecter en conséquence la fonction de coût de l’algorithme de correspondance de pose. De plus, ces fonctionnalités peuvent être affectées par les paramètres du filtre d’image15,17. Ainsi, cet ensemble de données n’est pas nécessairement une évaluation généralisable de l’exactitude du BVR. Il s’agit plutôt d’un outil permettant d’entraîner les utilisateurs à saisir des estimations de pose initiales appropriées et d’améliorer les algorithmes d’estimation de pose basés sur des modèles jusqu’à ce que les suppositions initiales rotoscopiques manuellement ne soient plus nécessaires.
Déclarations de divulgation
Les auteurs n’ont aucun conflit d’intérêts à divulguer.
Remerciements
Ces travaux ont été financés par la Subvention à la découverte du CRSNG (RGPIN/04688-2015) et la Bourse de nouveau chercheur de l’Ontario.
matériels
| Name | Company | Catalog Number | Comments |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper; pose estimation software | |
| Code | Queen's University | https://github.com/skelobslab/JOVE_BVR_FootModelAndMarker Based | |
| Content-Aware Fill algorithm, Photoshop | Adobe | ||
| Dataset | Queen's University | Download here | |
| MATLAB | Mathworks | n/a | computing platform |
| Mimics | Materialise, Belgium | 3D image processing software | |
| Revolution HD | General Electric Medical Systems | CT scan device used | |
| WristVisualizer | Brown University | https://github.com/DavidLaidlaw/WristVisualizer/tree/master; Visualization software | |
| XMALab | Brown University | https://bitbucket.org/xromm/xmalab/src/master/ |
Références
- Maharaj, J. N., et al. The reliability of foot and ankle bone and joint kinematics measured with biplanar videoradiography and manual scientific rotoscoping. Frontiers in Bioengineering and Biotechnology. 8 (106), (2020).
- Iaquinto, J. M., et al. Model-based tracking of the bones of the foot: A biplane fluoroscopy validation study. Computers in Biology and Medicine. 92, 118-127 (2018).
- Miranda, D. L., et al. Static and dynamic error of a biplanar videoradiography system using marker-based and markerless tracking techniques. Journal of Biomechanical Engineering. 133 (12), 121002 (2011).
- Tashman, S., Anderst, W. In-vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of Experimental Zoology Part A: Ecological Genetics and Physiology. 313 (5), 262-279 (2010).
- Challis, J. H. A procedure for determining rigid body transformation parameters. Journal of Biomechanics. 28 (6), 733-737 (1995).
- Lundberg, A., Goldie, I., Kalin, B. O., Selvik, G. Kinematics of the ankle/foot complex: plantarflexion and dorsiflexion. Foot & ankle. 9 (4), 194-200 (1989).
- You, B. -. M., Siy, P., Anderst, W., Tashman, S. In vivo measurement of 3-D skeletal kinematics from sequences of biplane radiographs: Application to knee kinematics. IEEE Transactions on Medical Imaging. 20 (6), 514-525 (2001).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a new model-based tracking technique for measuring three-dimensional, in vivo glenohumeral joint kinematics. Journal of Biomechanical Engineering. 128 (4), 604-609 (2006).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of three-dimensional model-based tibio-femoral tracking during running. Medical Engineering & Physics. 31 (1), 10-16 (2009).
- Martin, D. E., et al. Model-based tracking of the hip: implications for novel analyses of hip pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Massimini, D. F. Non-invasive determination of coupled motion of the scapula and humerus-An in-vitro validation. Journal of Biomechanics. 44 (3), 408-412 (2011).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8 (1), 1-10 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Cross, J. A., et al. Biplane fluoroscopy for hindfoot motion analysis during gait: A model-based evaluation. Medical Engineering & Physics. 43, 118-123 (2017).
- Akhbari, B., Morton, A. M., Moore, D. C., Crisco, J. J. Biplanar videoradiography to study the wrist and distal radioulnar joints. JoVE Journal of Visualized Experiments. (168), e62102 (2021).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM). Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Söderkvist, I., Wedin, P. -. &. #. 1. 9. 7. ;. Determining the movements of the skeleton using well-configured markers. Journal of Biomechanics. 26 (12), 1473-1477 (1993).
- Violin Plots for Matlab. Available from: https://github.com/bastibe/Violinplot-Matlab (2021)
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationExplorer plus d’articles
This article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.