
Method Article
מערך נתונים של וידאו-רדיוגרפיה דו-מישורית לפיתוח הערכת תנוחות מבוססת מודלים והדרכת משתמשים חדשים
In This Article
Summary
עבודה זו מציגה מערך נתונים in vivo עם תנוחות עצם המוערכות בשיטות מבוססות סמן. כלולה כאן שיטה להכשרת מפעילים בשיפור ההערכות הראשוניות שלהם להערכת תנוחה מבוססת מודל והפחתת השונות בין המפעילים.
Abstract
מדידת התנועה של עצמות כף הרגל הקטנות היא קריטית להבנת אובדן תפקוד פתולוגי. וידאו-רדיוגרפיה דו-מישורית מתאימה היטב למדידת תנועת עצם in vivo , אך מתעוררים אתגרים בעת הערכת הסיבוב והתרגום (תנוחה) של כל עצם. תנוחת העצם מוערכת בדרך כלל בשיטות מבוססות סמן או מודל. שיטות מבוססות סמנים הן מדויקות ביותר אך אינן נפוצות in vivo בשל הפולשניות שלהן. שיטות מבוססות מודלים נפוצות יותר אך כיום הן פחות מדויקות מכיוון שהן מסתמכות על קלט משתמש ואלגוריתמים ספציפיים למעבדה. עבודה זו מציגה מערך נתונים נדיר in vivo של תנוחות הקלקנאוס, הטלוס והשוקה, כפי שנמדד בשיטות מבוססות סמן במהלך ריצה וקפיצה. כלולה שיטה להכשרת משתמשים לשפר את הניחושים הראשוניים שלהם לתוכנת הערכת תנוחות מבוססת מודל, באמצעות משוב חזותי מבוסס סמן. מפעילים חדשים הצליחו להעריך את תנוחות העצם בטווח של 2 מעלות סיבוב ו-1 מ"מ של תרגום התנוחה מבוססת הסמן, בדומה למשתמש מומחה בתוכנה מבוססת המודל, ומייצג שיפור משמעותי לעומת השונות בין המפעילים שדווחה בעבר. יתר על כן, ניתן להשתמש במערך נתונים זה כדי לאמת תוכנות אחרות להערכת תנוחות מבוססות מודלים. בסופו של דבר, שיתוף מערך נתונים זה ישפר את המהירות והדיוק שבהם משתמשים יכולים למדוד תנוחות עצם מווידאורדיוגרפיה דו-מישורית.
Introduction
מדידת התנועה של עצמות כף הרגל הקטנות היא קריטית להבנת אובדן תפקוד פתולוגי. עם זאת, מדידת תנועה דינמית של עצמות כף הרגל היא מאתגרת בשל הגודל הקטן והתצורה הצפופה של העצמות והמפרקים 1,2. טכנולוגיית וידאו-רדיוגרפיה דו-מישורית (BVR) מתאימה היטב למדידת התנועה התלת מימדית (3D) in vivo של העצמות הקטנות של כף הרגל והקרסול במהלך פעילויות דינמיות. BVR מספק תובנות לגבי ארתרו-קינמטיקה על ידי שימוש בשני מקורות רנטגן המחוברים למגבירי תמונה, הממירים קרני רנטגן של תנועה דינמית לאור נראה. כאשר כף הרגל נעה דרך נפח הצילום, מצלמות מהירות מצלמות את התמונות. התמונות אינן מעוותות ומוקרנות לתוך נפח הצילום באמצעות מיקומי מצלמה מכוילים 3,4. לאחר מכן מעריכים את תנוחת העצם של שש דרגות החופש (6 d.o.f. למיקום ו-3 d.o.f. להתמצאות) באמצעות שיטות מבוססות סמן או מבוססות מודל3.
שיטות הערכת התנוחות המבוססות על סמן או מודל משתנות בין מעבדות ודיסציפלינות. תקן הזהב של מדידת תנוחת BVR דינמית הוא השתלת סמני טנטלום קטנים לתוך עצם העניין 4,5. נדרשים לפחות שלושה סמנים לכל עצם כדי להעריך את התנוחה, עם סמנים נוספים המובילים לדיוק גבוה יותר 5,6. שיטה זו פחות נפוצה in vivo בשל הפולשניות שלה, מכיוון שהיא דורשת השתלה כירורגית, ולאחר מכן הסמנים מוטמעים באופן קבוע בעצם7. לחלופין, מעקב מבוסס מודל משתמש במידע נפחי משיטות הדמיה אחרות, כגון טומוגרפיה ממוחשבת (CT) או הדמיית תהודה מגנטית, כדי לשחזר את המודל בתמונות BVR 2,3,8,9,10,11,12,13,14,15 . לאחר מכן המודל עובר מניפולציה ידנית למחצה כדי להתאים בצורה הטובה ביותר לתמונות (רוטוסקופ), בדרך כלל תוך שימוש בשילוב של קלט משתמש כהערכה ראשונית ואופטימיזציה צולבת מתאם 3,8,9,10,15. הערכת תנוחות מבוססת מודל היא פחות פולשנית, ולכן נפוצה יותר, אך יש לה זמן עיבוד גדול יותר ודורשת קלט של המשתמש. מכיוון שתהליך הרוטוסקופיה הוא כרגע ידני למחצה, נותר צורך להכשיר מפעילים באופן אמין בתוכנה הספציפית למעבדה מכיוון ששגיאות שורש ממוצע ריבועי (RMS) בין מפעילים יכולות לנוע בין 0.83 מ"מ ל-4.96 מ"מ, ו-0.58° עד 10.29° לאורך או בערך ציר1 יחיד. יתר על כן, אלגוריתמים להתאמת מודלים משתפרים, אך דורשים אימות באמצעות פרדיגמות ניסיוניות הקרובות ככל האפשר לתנאי in vivo.
הדיוק של הערכות תנוחות מבוססות מודל מוערך לעתים קרובות מול מדדים מבוססי סמן. לדוגמה, רגלי גופות אנושיות שהושתלו בסמנים הועברו דרך עמדות תנועה מדומות 13,14,16. תמונות ה-BVR שצולמו מוזנות לאחר מכן לשיטת הרוטוסקופ מבוססת המודל ומושווים למדדים מבוססי הסמן לדיוק (הטיה ודיוק). בעוד שהשימוש בכף רגל סטטית הוא גישה בעלת ערך, יש לה מגבלות בהערכת דיוק תנוחת עצם אמיתית in vivo. לדוגמא, תנוחות המפרקים קבועות יחסית בכף הרגל של גופה עם היעדר פעילות שרירית ועומסי in vivo. לפיכך, ייתכן שהוא לא מייצג את גבולות התנועה של המפרקים במשימות תנועה מגוונות. שינויים בתנוחת המפרקים משנים את החסימה בתמונות ה-BVR, המהווה מקור לטעות מדידה בעת הערכת תנוחות עצם כף רגל קטנות וצפופות13. יתר על כן, בעת שימוש באלגוריתמים להתאמת תמונה, נוכחותם של סמנים בתמונות ה-BVR עשויה להטות את התוצאות. בעוד שקבוצות הסירו את הסמנים מתמונות הטומוגרפיה הממוחשבת (CT) הדמיה דיגיטלית ותקשורת ברפואה (DICOM) 9,14,16, הם מוסרים רק מדי פעם גם מתמונות הווידאורדיוגרפיה הדו-מישורית16.
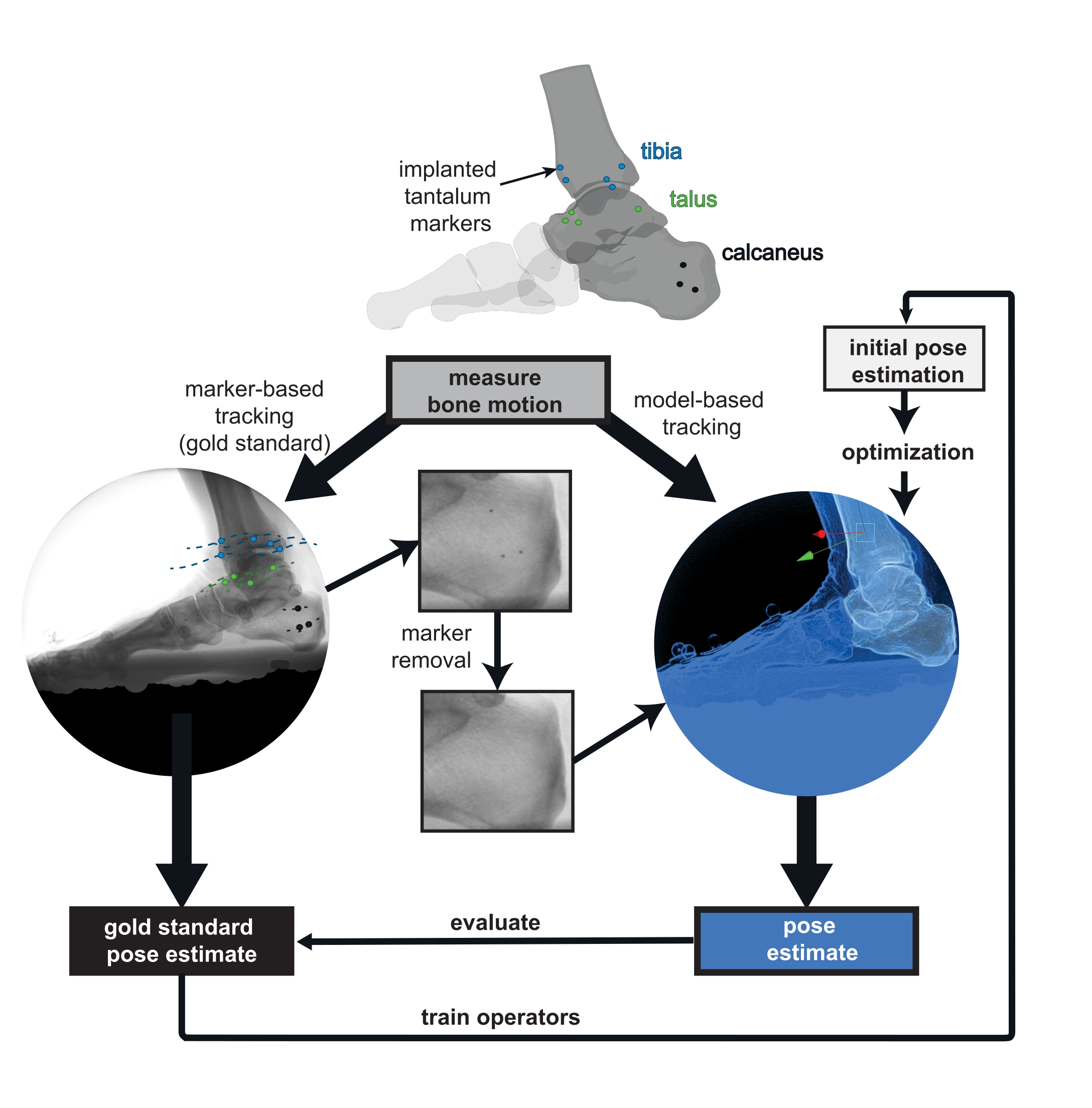
העבודה הזו מציגה מערך נתונים של BVR בקוד פתוח של משתתף שקופץ ורץ in vivo, שיש לו סמנים מושתלים בעצמות כף הרגל והקרסול שלו (איור 1). ניתנת הערכת תנוחה מבוססת סמן לתנועת העצם in vivo של השוקה, הטלוס והקלקנאוס. הסמנים הוסרו הן מתמונות הרנטגן והן מתמונות ה-CT כדי להגביל כל הטיה שהוצגה במהלך הערכת דיוק המעקב מבוסס המודל. מערך נתונים זה מיועד להערכת הדיוק של כל תוכנת הערכת תנוחות מבוססת מודל, ולשיפור הבחירה של הערכות תנוחות ראשוניות עבור תהליכים חצי ידניים. זה מתאים ביותר לאנשים שמטרתם לשפר את המהירות והדיוק של צינור עיבוד התמונה BVR, ולמעבדות המעוניינות בשונות נמוכה בין מפעילים בהערכת התנוחה הראשונית.

איור 1: סקירה כללית של מערך הנתונים של וידאו-רדיוגרפיה דו-מישורית (BVR) המסופק. סמנים מושתלים נמצאים במעקב in vivo כתקן הזהב להערכת תנוחת העצם. הסמנים הוסרו דיגיטלית מתמונות ה-BVR ומסריקות הטומוגרפיה הממוחשבת כדי למנוע הטיה במעקב מבוסס המודל. ניתן להשוות תנוחות המוערכות מכל תוכנת מעקב מבוססת מודל לתקן הזהב של מעקב מבוסס סמן. ניתן להשתמש באומדן התנוחה המבוסס על סמן גם כדי להכשיר מפעילים חדשים לשפר את הערכת תנוחת העצם הראשונית שלהם למעקב מבוסס מודל. אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}
Protocol
פרוטוקולים ניסיוניים אושרו על ידי מועצת האתיקה המחקרית של מדעי הבריאות של אוניברסיטת קווינס ובתי החולים הלימודיים המסונפים. המשתתף נתן הסכמה מדעת לפני ההשתתפות באיסוף הנתונים.
1. הכנת מטופלים ויצירת מערכי נתונים
הערה: למשתתף (זכר, 49 שנים, 83 ק"ג, גובה 1.75 מ') היו מספר סמני טנטלום בקוטר 0.8 מ"מ שהושתלו בעבר בקלקנאוס (3 סמנים), טאלוס (4 סמנים) ושוק (5 סמנים; איור 1).
- רכוש סריקת CT עם אלגוריתם להפחתת חפצי מתכת (כדי להפחית את עיוות התמונה עקב שתלי מתכת) על כף הרגל של המשתתף בתנוחת קרסול פלנטרית מקסימלית בגודל פיקסל של 0.500 מ"מ או פחות, ועובי פרוסה של 0.625 מ"מ או פחות.
הערה: כאן, כף רגלו הימנית של המשתתף נסרקה ברזולוציה של 0.441 מ"מ x 0.441 מ"מ x 0.625 מ"מ. מיקומי הסמנים אינם ממוקמים במיקומים אנטומיים ספציפיים בתוך העצם4; במקום זאת, הם מופצים בכל העצם5. - לשיטות לאיסוף וידיאו-רדיוגרפיה דו-מישורית ועיבוד הנתונים בפירוט, ראה17. בקצרה, בקש מהמשתתף להשלים את התנועה הרצויה, כאשר תנוחת ההתחלה שלו נאצרת כך שכף רגלו נוחתת בנפח הווידאורדיוגרפיה הדו-מישורית. השתמש באובייקט כיול וברשתות ביטול עיוות כדי לאתר את המצלמות ולבטל את העיוות של התמונות,בהתאמה 18.
הערה: המשתתף במחקר זה השלים ניסויים של שתי תנועות שונות. הם קפצו למטרונום ב-108 פעימות לדקה ורצו לאט דרך הווליום. התמונות צולמו ברציפות ב-250 הרץ עם מהירות תריס של 1111 מיקרון, ומערכת הרנטגן הוגדרה ל-70 קילו וולט ו-100 mA. - פלח את הסמנים בנפרד באמצעות תוכנת עיבוד תמונה רפואית תלת מימדית. בעזרת אלגוריתם המילוי המודע לתוכן בעורך גרפיקת הרסטר ובמיקומי הסמנים הידועים, הסירו את הסמנים מתמונות DICOM. צור את הנפחים החלקיים של העצם ואת רשתות הפסיפס על ידי פילוח של התמונות ללא סמן כפי שמוצגב-17. יישר הן את הנפחים החלקיים והן את הרשתות ואחסן אותם במרחב CT.
- עבור כל מסגרת, רשום את קואורדינטות תמונת ה-x-y הלא מסוננות של כל סמן ב-XMALab וייצא אותו18. משולש את הקואורדינטות התלת-ממדיות באמצעות ארגז הכלים של ראייה ממוחשבת ב-MATLAB. הערך את התנוחה על ידי התאמת מיקומי הסמן התלת-ממדי במרחב רנטגן לצנטרואידים המתאימים לכדור במרחב CT באמצעות גישת הריבועים הפחותים19. השתמשו באותו אלגוריתם בעורך גרפיקת הרסטר כדי להסיר את הסמנים בתמונות הרנטגן ולהכין אותן למעקב.
2. גש למערך הנתונים ולקוד
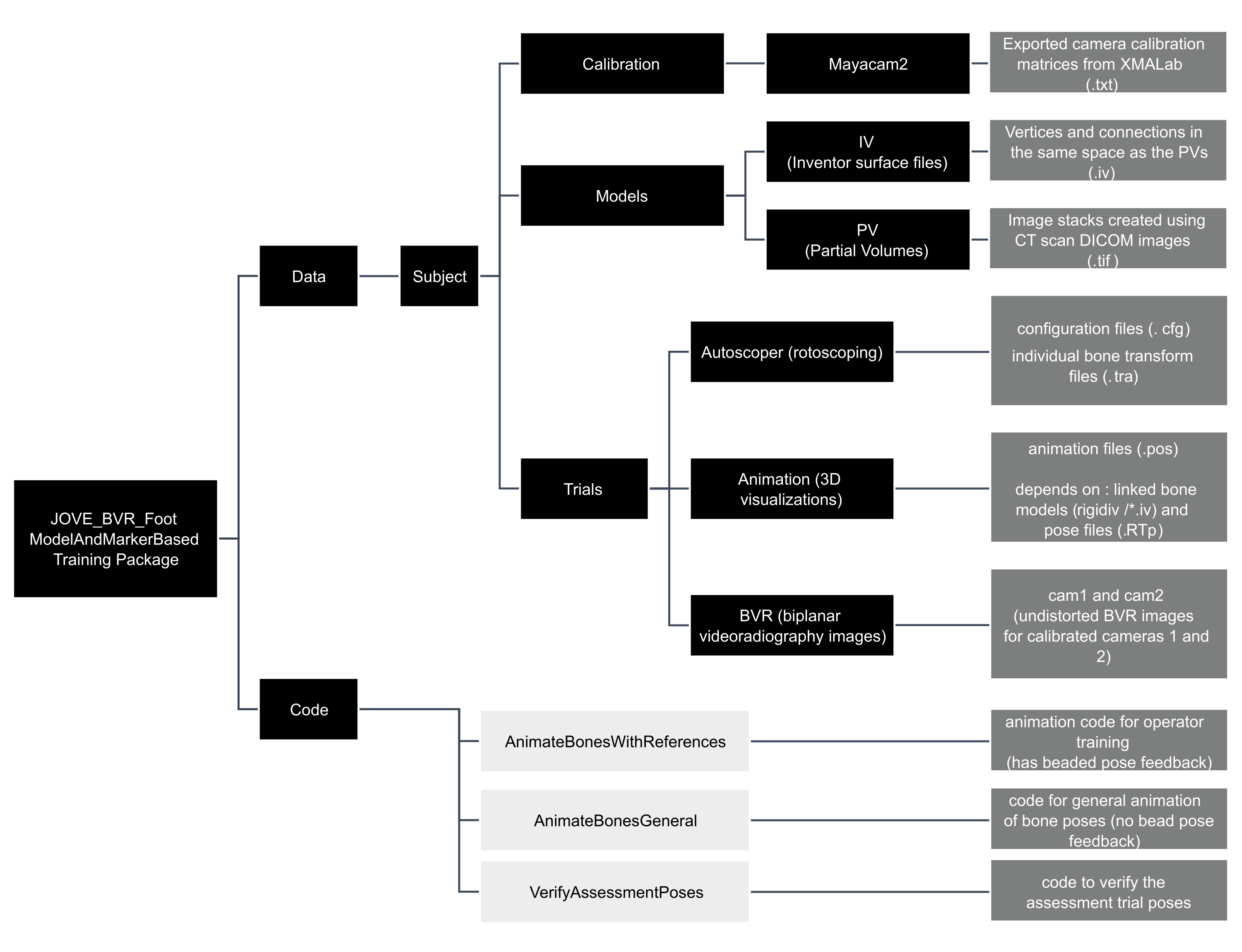
- הורד את מערך הנתונים מכאן. ישנן תמונות BVR וקבצי כיול עבור כל ניסוי, כמו גם הערכות תנוחת ייחוס שנשמרו בפורמט .tra (איור 2). הורד/שכפל את חבילת הקוד מ: https://github.com/skelobslab/JOVE_BVR_FootModelAndMarkerBased.

איור 2: עץ נתונים של חבילת ההדרכה של JOVE_BVR_Foot_ModelAndMarkerBased. תיקיות מוצגות בתיבות שחורות, קוד מוצג בתיבות אפורות בהירות ותיאורי קבצים כלולים בתיבות אפורות כהות. אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}
3. להעריך את הדיוק של אלגוריתם מעקב המודלים
- שמור הערכות תנוחות כקובץ .tra בתיקיית ההפניה של גירסת הניסיון. סדר את קובץ ה- .tra עם התנוחה מחלל עצם לחלל רנטגן כתובה בפורמט של שורה אחת x 16 עמודות, כאשר כל שורה מתאימה למסגרת ומטריצת התנוחות בגודל 4 x 4 כתובה כ- [עמודה ראשונה, עמודה שנייה, עמודה שלישית ועמודה רביעית].
הערה: מרחב עצם הוא שם נרדף למרחב CT במערך נתונים זה. - אמת את הערכות התנוחה על ידי פתיחת הסקריפט verifyAssessmentPoses.m בפלטפורמת המחשוב ולאחר מכן לחיצה על הפעל. טען את הקבצים כמתואר בהנחיות. התסריט יחשב את הציר הסליל בין אומדן התנוחה המבוסס על המודל והסמן ויחזיר הפרש סיבוב ותרגום עבור כל מסגרת של נתונים במעקב.
4. הכשרת מפעילים חדשים
הערה: סעיף זה מתאר את ההדרכה עם משוב עבור מפעיל חדש. כאן, Autoscoper היא תוכנת הערכת התנוחות מבוססת המודל שנבחרה, אך תוכנה אחרת יכולה לשמש כתחליף.
- הורד את הגרסה העדכנית ביותר של תוכנת הערכת התנוחות מ: https://simtk.org/projects/autoscoper.
- כדי לאתר קובצי BVR מקומיים, פתח את הקובץ בעורך טקסט (.\JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\POINTER_T0019_jog001.cfg). התוכנה משתמשת בקובץ מצביע (.cfg) כדי לאתר קבצים. שנה את הספריות כך שיובילו לקבצים המקומיים המתאימים. שמור את הקובץ וסגור אותו.
- כדי לטעון את תמונות ה-BVR ופרטי המצלמה, פתחו את תוכנת הערכת התנוחות ולחצו על Load Trial. נווט אל קובץ תצורת המצביע שנשמר בשלב הקודם ולחץ על פתח.
- כדי לעקוב, עקוב אחר הפרוטוקול ב-Akhbari et al17 (מעקב מבוסס מודל). בקצרה, סובב ותרגם את העצם על ידי לחיצה וגרירה של הצירים על העצם עד לשביעות רצון מהמיקום והכיוון של הקלקנאוס. לחץ על מקש S במקלדת כדי לשמור את המסגרת הנוכחית עבור הקלקנאוס (cal).
הערה: הגדרות הסינון כלולות ב-\JOVE_BVR_Foot_ModelAndMarkerBased\Data\SOL001A\T0019_jog0001\Autoscoper\ שניתן להשתמש בהן לסינון כפי שמוצג ב-Akhbari et al17. - כדי לשמור את הקבצים, לחץ על שמור מעקב. שמור את הקובץ כ-[מספר ניסיון]_[מספר נושא]_[שם ניסיון]_[קוד עצם בן 3 אותיות].tra (למשל, T0019_SOL001A_jog0001_cal.tra) תחת הספרייה הרצויה. ייצא את ההגדרות כנוכחי, מטריצה, עמודה, פסיק, ללא, מ"מ, מעלות.
הערה: קודי העצם בני שלוש האותיות עבור השוקה והטאלוס הם tib ו-tal, בהתאמה. - כדי ליצור קבצים למעקב אחר דיוק, פתח את פלטפורמת המחשוב והפעל את הסקריפט animateBonesWithReferences.m בתיקיית הקוד. נווט אל התיקיות בתוך חבילת ההדרכה כמתבקש על-ידי תיבות הדו-שיח.
הערה: קוד animateBonesWithReferences.m הוא קוד מיוחד לאימון המספק את התנוחות מנתונים מבוססי סמן כמשוב לשיפור המעקב של המפעיל החדש. - התקן תוכנת תצוגה חזותית מ: https://github.com/DavidLaidlaw/WristVisualizer/tree/master. כדי להמחיש את המעקב, פתח את קובץ ה- .pos שנוצר בשלב 4.6 בתוכנת ההדמיה; מיקום הקובץ שלו יהיה בחלון הפקודה של פלטפורמת המחשוב.
- ודא את יישור העצם המסומנת (אפור) עם עצם הייחוס. צבע ירוק מציין שהתנוחה נמצאת בתוך סף הסיבוב והתרגום ואילו אדום מציין שהיא מחוץ לסף. המשיכו לעקוב ולהציג תצוגה חזותית עד שכל המסגרות יהפכו לירוקות. שנה את הספים (phi - סיבוב, trans - תרגום) בשורות 10 ו-11 של הסקריפט animateBonesWithReferences.m, במידת הצורך.
הערה: אם עצם הייחוס אדומה (איור 3A), זה אומר שהתנוחה נמצאת במרחק של יותר מ-1 מ"מ או 2 מעלות מהתנוחה המבוססת על סמן, כפי שנמדד באמצעות הציר הסלילי. אם היא ירוקה, והיא סבירה מבחינה ויזואלית, המעקב אחר המסגרת הזו מספיק טוב (איור 3B). - כדי לעקוב אחר העצמות האחרות בקומפלקס הקרסול, חזור על שלבים 4.4 עד 4.8 עבור הטלוס והשוקה. השתמש בתוכנת ההדמיה כדי להבטיח שהעצמות אינן מתנגשות.
- כדי להשלים את ההערכה, עקוב ודמיין את השוקה, הטלוס והקלקנאוס בניסוי הנקרא ניסוי הערכה.
- פתח את פלטפורמת המחשוב והפעל את הקוד animateBonesGeneral.m. נווט אל התיקיות בתוך חבילת ההדרכה כמתבקש על-ידי תיבות הדו-שיח. אמת את תנוחות העצם באמצעות קובץ ה- .pos בתוכנת ההדמיה. קוד זה ניתן להכללה לניסויים אחרים להדמיה תלת מימדית של העצמות.
הערה: התנוחה האמיתית, המבוססת על סמן, לא תהיה זמינה יותר. רק העצמות האפורות יהיו נוכחות.
- פתח את פלטפורמת המחשוב והפעל את הקוד animateBonesGeneral.m. נווט אל התיקיות בתוך חבילת ההדרכה כמתבקש על-ידי תיבות הדו-שיח. אמת את תנוחות העצם באמצעות קובץ ה- .pos בתוכנת ההדמיה. קוד זה ניתן להכללה לניסויים אחרים להדמיה תלת מימדית של העצמות.
- כדי להעריך את הערכות התנוחה, פתח את קובץ ה- Script verifyAssessmentPoses.m בפלטפורמת המחשוב ולחץ על הפעל. התסריט יחשב את הציר הסליל בין אומדן התנוחה המבוסס על המודל והסמן ויחזיר הפרש סיבוב ותרגום עבור כל מסגרת של נתונים במעקב. פעולה זו תפיק את אותו גרף כמו ב- animateBoneswithReferences.m, אך לא תייצר הנפשה.
- ודא שכל נקודות הנתונים נמצאות מתחת לסף שנבחר (קו שטוח) הן עבור סיבוב והן עבור תרגום. שמרו את התוצאות בקובץ .csv, במידת הצורך.

איור 3: ויזואליזציה של מעקב מקובל ולא מקובל. (A) מעקב אחר עצם קלקנאוס באמצעות מעקב מבוסס מודל (אפור; מסומן גם על ידי החץ האפור) שאינו תואם מספיק את התנוחה מהערכת התנוחה המבוססת על סמן (אדום; מסומן גם על ידי החץ האדום). (B) Calcaneus התואם במידה מספקת את התנוחה מהערכת התנוחה המבוססת על סמן. הקלקנאוס המסומן מוצג בירוק כתוצאה מכך (מסומן גם על ידי החצים האפורים והירוקים). אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}
תוצאות
שני מפעילים חדשים ומומחה אחד השלימו את ההכשרה מבוססת המודלים. 41 המסגרות של ניסוי ההערכה מדדו את המיומנות של המעקב מבוסס המודל שלהם (איור 4). הערכות התנוחה של המפעילים היו בדרך כלל הרבה מתחת לסף שנקבע. ההטיה החציונית הממוצעת בסיבוב על פני העצמות הייתה 0.75° (0.69° עד 0.85°) עבור הקלקנאוס, 0.40° (0.37° עד 0.46°) עבור הטלוס ו-0.89° (0.76° עד 1.07°) עבור השוקה. הטיית התרגום החציונית הממוצעת הייתה 0.10 מ"מ (0.05 מ"מ עד 0.16 מ"מ) עבור הקלקנאוס, 0.31 מ"מ (0.22 מ"מ עד 0.41 מ"מ) עבור הטלוס ו-0.33 מ"מ (0.27 מ"מ עד 0.37 מ"מ) עבור השוקה. תוצאות אלו מצביעות על כך שההדרכה יעילה באימון המפעילים לסובלנות מוגדרת.

איור 4: הטיית סיבוב ותרגום עבור אופרטורים חדשים ומומחה. עלילות כינור20 מציגות הטיה בסיבוב (A)(C)(E) ותרגום (B)(D)(F) בין הערכות תנוחה מבוססות מודל ומבוססות סמן עבור שני מפעילים חדשים ומומחה אחד עבור (A)(B) calcaneus, (C)(D) talus ו-(E)(F) טיביה. כל 41 המסגרות של ניסוי ההערכה מוצגות כנקודות נתונים, עם החציון (עיגול לבן), טווח בין-רבעוני (קו אנכי עבה) וממוצע (קו אופקי עבה). הקו השחור ב- 2° ו- 1 מ"מ מייצגים את הספים שנבחרו. שש מסגרות מחוץ לסף עבור מפעיל חדש 2 ב- (E) אינן מוצגות. אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}
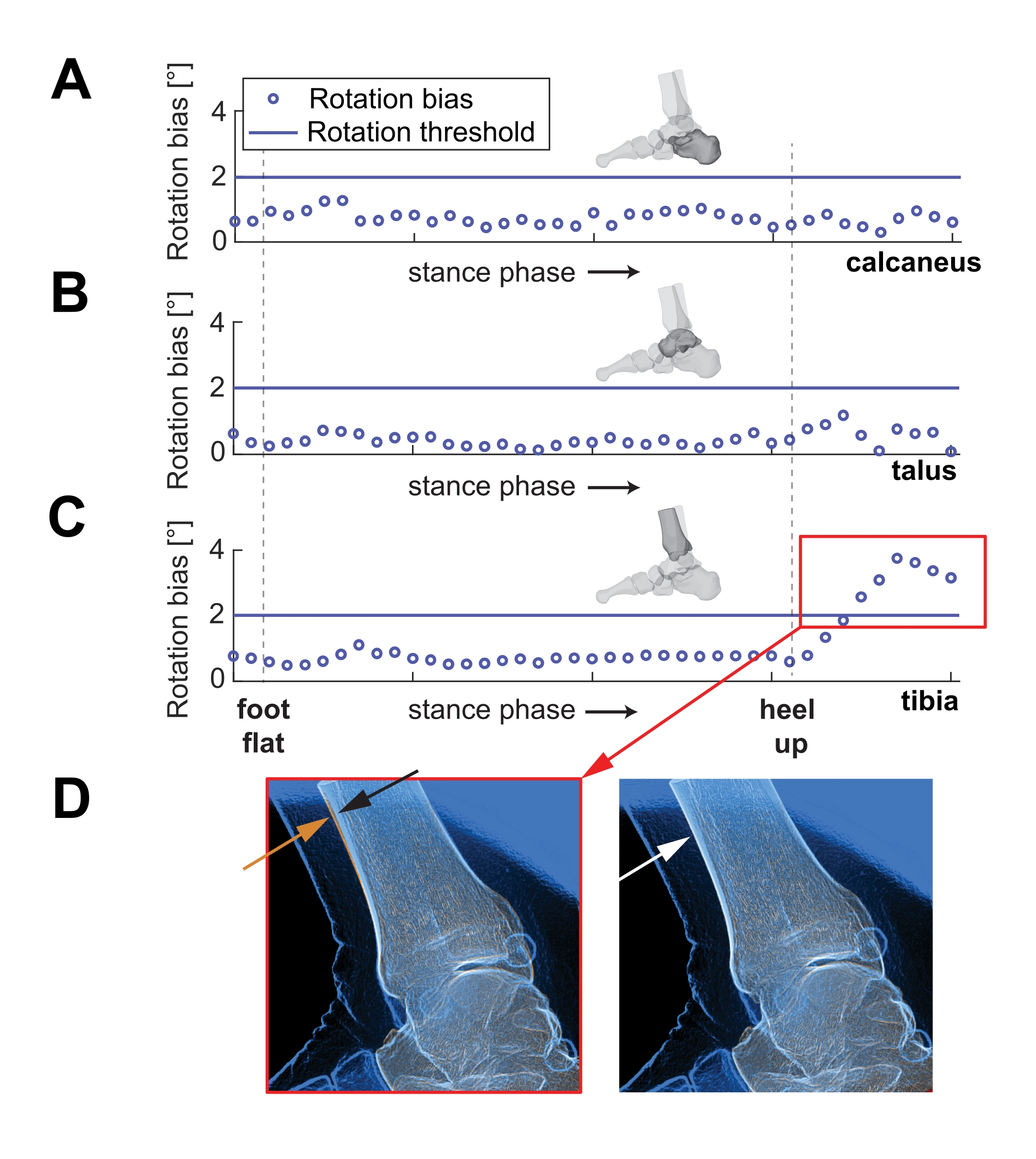
למפעיל חדש אחד היו שש פריימים מעל סף הסיבוב של 2 מעלות במעקב אחר השוקה שלהם. המסגרות זוהו באמצעות אחד הגרפים שנוצרו ב-verifyAssessmentPoses.m (איור 5). שש הפריימים הללו קשים יותר למעקב בגלל חסימת השוקה על ידי הרגל השנייה המתנדנדת דרך הנוף.

איור 5: הטיית סיבוב עבור כל מסגרת על פני שלב העמדה. דוגמה למעקב אחר הסיבוב של המפעיל החדש השני על פני חלק משלב העמידה של הריצה, עבור (A) הקלקנאוס, (B) הטלוס ו-(C) השוקה. שימו לב שהתיבה האדומה ב-(C) מציגה את המסגרות עם השגיאות הגבוהות. (D) משמאל, תמונה מייצגת מראה את ההבדל המשוער ביישור של הקווים הכתומים והכחולים של השוקה הקדמית (מסומן על ידי חיצים כתומים ושחורים). התמונה הימנית מציגה דוגמה לשוק עם מעקב טוב (מסומן על ידי החץ הלבן). אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}
קובץ משלים. אנא לחץ כאן להורדת קובץ זה.
Discussion
הערכת תנוחה מדויקת מבוססת מודל היא בסיסית למדידת ארתרו-קינמטיקה ותנועת שלד. שיטות אימות קודמות להערכת תנוחות התבססו על דגימות גופות עם סמנים מושתלים, ללא עומס in vivo וטווחי תנועה של מפרקים. מערך נתונים זה in vivo של ריצה ודילוג עם הערכת תנוחה מבוססת סמן מאפשר אימות של אלגוריתמים מבוססי מודל. יתר על כן, מערך הנתונים מאורגן כדי להכשיר מפעילים חדשים, כך שההערכה הראשונית הנדרשת עבור רוב האלגוריתמים מבוססי המודל היא בתוך סובלנות מוגדרת, מה שמפחית את השונות בין המפעילים. קוד MATLAB מסופק כך שניתן להנפיש את העצמות ונוצר אוטומטית משוב באיכות התנוחה.
המפעילים החדשים הוכשרו בהצלחה לסובלנות מוגדרת של 2 מעלות סיבוב ו-1 מ"מ תרגום. מגבלות אלו נמוכות בהרבה מהאמינות המדווחת בין המפעילים, שיכולה להיות גדולה עד 5 מ"מ ו-10°1. עם זאת, הסובלנות שנבחרו גבוהה פי 2 עד פי 4 משגיאת ה-RMS של ניסויי כף רגל שלמים אחרים (0.59 מ"מ ו-0.71°16). הסובלנות כוללת את הטווחים הגבוהים יותר של שגיאת RMS, אך עדיין מייצגת שיפור משמעותי לעומת השונות המדווחת בין המפעילים. יתר על כן, תנאי in vivo מאתגרים יותר למעקב מאשר תנוחות כף רגל סטטיות עקב שונות בחסימת עצמות, רקמות רכות וחפצים של תנועה במהירות גבוהה דרך נפח הרנטגן. המפעילים החדשים ביצעו בהצלחה רוטוסקופ של הניסויים בתוך הסובלנות והיו קרובים לתוצאות המומחה, למעט שש המסגרות המוצגות באיור 5C. לפיכך, הסובלנות שנקבעה מייצגת שיפור לעומת השונות המדווחת בין המפעילים, והתוצאות מראות ששיטה זו יכולה להכשיר בהצלחה מפעילים חדשים בתוך סובלנות זו.
שלב קריטי בפרוטוקול זה הוא האיטרציה בין רוטוסקופ בתוכנה שנבחרה לבין הדמיה בתלת מימד. איטרציה זו חשובה להבנת האופן שבו העצמות מכוונות במרחב. זה מאפשר למפעיל לוודא אם תנוחות העצם אפשריות מבחינה ביולוגית ואינן מתנגשות בעצמות אחרות. החלפה מתמדת בין רוטוסקופ להדמיה משפרת את איכות ההערכות הסופיות של תנוחת העצם ועוזרת לתפוס שגיאות אופטימיזציה.
מערך ההדרכה, במיוחד ניסוי ההערכה, כולל תרחישי מעקב מאתגרים כדי לדחוף את הגבולות של המפעילים החדשים. המיקום של מקורות הרנטגן ומגבירי התמונה בקולקציה זו גרם לכף הרגל המתנדנדת לחסום את הנופים, וליצור אתגרים ליישור דגמי העצם. המפעיל החדש, עם מספר מסגרות מעל סף הסיבוב, הושפע מכף הרגל הנגדית שהסתירה את הנוף. אסטרטגיות כגון שינוי הגדרות המסנן ורוטוסקופיה של המסגרות מיד לפני ואחרי החסימה יכולות לעזור להפחית בעיות אלה. יתר על כן, הכיוון של מערכות הקואורדינטות שונה מספיק בין ה-DICOMs לתוכנת הערכת התנוחות, מה שגורם להיפוך זווית בשוקה. המפעילים חייבים לעקוב אחר כל פריים בשלב זה כדי להתגבר על אתגר זה. תרחישים אלה אינם נדירים באוספי נתונים ומייצגים אתגרים שהערכת תנוחות מבוססת מודל אוטומטית צריכה לנווט בהם בעתיד ולכן הם תוספת חשובה למערך נתונים זה.
ישנן מגבלות מסוימות עם פרוטוקול זה. ראשית, ההכרזה על הערכת התנוחה המבוססת על סמן כתקן הזהב שנויה במחלוקת מכיוון שהפרש הדיוק בין הערכת תנוחה מבוססת סמן למודל אינו בדרך כלל שונה בסדר גודל 2,3,10. עם זאת, סביר להניח שהשינויים החזותיים בתמונות BVR המתעוררים עם אוספים in vivo (כלומר, חפץ תנועה, רקמה רכה וחסימת עצם) נוטים יותר לגרום לשגיאות בהערכת תנוחה מבוססת מודל בהשוואה לשיטות מבוססות סמן. נדרשים ניסויים נוספים כדי לאשש השערה זו. בנוסף, מערך נתונים זה אינו לוכד כל אוסף צילומי רנטגן דו-מישוריים. כיוון המצלמות, כך שהעצמות נמצאות במיקומים יחסיים שונים, יכול לשנות את בולטות תכונת העצם ולהשפיע בהתאמה על פונקציית העלות של אלגוריתם התאמת התנוחה. יתר על כן, תכונות אלה עשויות להיות מושפעות מהגדרות מסנן התמונה15,17. לפיכך, מערך נתונים זה אינו בהכרח הערכה ניתנת להכללה של דיוק BVR. במקום זאת, זהו כלי להכשרת משתמשים להזין הערכות תנוחה ראשוניות מתאימות ולשיפור אלגוריתמים להערכת תנוחות מבוססות מודלים עד שלא יהיה עוד צורך בניחושים ראשוניים ידניים.
Disclosures
למחברים אין ניגודי אינטרסים לחשוף.
Acknowledgements
עבודה זו מומנה על ידי מענק הגילוי של NSERC (RGPIN/04688-2015) ופרס החוקר המוקדם של אונטריו.
Materials
| Name | Company | Catalog Number | Comments |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper; pose estimation software | |
| Code | Queen's University | https://github.com/skelobslab/JOVE_BVR_FootModelAndMarker Based | |
| Content-Aware Fill algorithm, Photoshop | Adobe | ||
| Dataset | Queen's University | Download here | |
| MATLAB | Mathworks | n/a | computing platform |
| Mimics | Materialise, Belgium | 3D image processing software | |
| Revolution HD | General Electric Medical Systems | CT scan device used | |
| WristVisualizer | Brown University | https://github.com/DavidLaidlaw/WristVisualizer/tree/master; Visualization software | |
| XMALab | Brown University | https://bitbucket.org/xromm/xmalab/src/master/ |
References
- Maharaj, J. N., et al. The reliability of foot and ankle bone and joint kinematics measured with biplanar videoradiography and manual scientific rotoscoping. Frontiers in Bioengineering and Biotechnology. 8 (106), (2020).
- Iaquinto, J. M., et al. Model-based tracking of the bones of the foot: A biplane fluoroscopy validation study. Computers in Biology and Medicine. 92, 118-127 (2018).
- Miranda, D. L., et al. Static and dynamic error of a biplanar videoradiography system using marker-based and markerless tracking techniques. Journal of Biomechanical Engineering. 133 (12), 121002 (2011).
- Tashman, S., Anderst, W. In-vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of Experimental Zoology Part A: Ecological Genetics and Physiology. 313 (5), 262-279 (2010).
- Challis, J. H. A procedure for determining rigid body transformation parameters. Journal of Biomechanics. 28 (6), 733-737 (1995).
- Lundberg, A., Goldie, I., Kalin, B. O., Selvik, G. Kinematics of the ankle/foot complex: plantarflexion and dorsiflexion. Foot & ankle. 9 (4), 194-200 (1989).
- You, B. -. M., Siy, P., Anderst, W., Tashman, S. In vivo measurement of 3-D skeletal kinematics from sequences of biplane radiographs: Application to knee kinematics. IEEE Transactions on Medical Imaging. 20 (6), 514-525 (2001).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a new model-based tracking technique for measuring three-dimensional, in vivo glenohumeral joint kinematics. Journal of Biomechanical Engineering. 128 (4), 604-609 (2006).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of three-dimensional model-based tibio-femoral tracking during running. Medical Engineering & Physics. 31 (1), 10-16 (2009).
- Martin, D. E., et al. Model-based tracking of the hip: implications for novel analyses of hip pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Massimini, D. F. Non-invasive determination of coupled motion of the scapula and humerus-An in-vitro validation. Journal of Biomechanics. 44 (3), 408-412 (2011).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8 (1), 1-10 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Cross, J. A., et al. Biplane fluoroscopy for hindfoot motion analysis during gait: A model-based evaluation. Medical Engineering & Physics. 43, 118-123 (2017).
- Akhbari, B., Morton, A. M., Moore, D. C., Crisco, J. J. Biplanar videoradiography to study the wrist and distal radioulnar joints. JoVE Journal of Visualized Experiments. (168), e62102 (2021).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM). Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Söderkvist, I., Wedin, P. -. &. #. 1. 9. 7. ;. Determining the movements of the skeleton using well-configured markers. Journal of Biomechanics. 26 (12), 1473-1477 (1993).
- Violin Plots for Matlab. Available from: https://github.com/bastibe/Violinplot-Matlab (2021)
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved