
Method Article
Роботизированная абляция фибрилляции предсердий
В этой статье
Резюме
Pulmonary vein isolation (PVI) with an ablation catheter is a curative treatment for atrial fibrillation (AF). Robotic catheter systems aim to improve catheter steerability. Here, a procedure with a new robotic catheter system is presented. The goal of the procedure is electrical block between pulmonary vein and left atrium.
Аннотация
Справочная информация: Легочная изоляция вены (PVI) является создана для лечения фибрилляции предсердий (ФП). Во PVI создана электрическая блок проводимости между легочной вены (PV) и левого предсердия (LA). Этот блок проводимости препятствует AF, которая запускается с помощью нерегулярной электрической активности, происходящих из PV. Тем не менее, трансмуральный предсердий поражения требуются, которые могут быть сложной задачей. Re-проводимости и рецидива ФП происходят в 20 - 40% случаев. Роботизированные системы катетер направлены на улучшение управляемости катетера. Здесь процедура с новой системой дистанционного катетера (RCS), представлен. Цель этой статьи показать целесообразность робота AF абляции с новой системе. Материалы и методы: После межпредсердной перегородки транс-прокол с помощью длинной иглы и оболочку под флуороскопа. Иглу удаляют, а проволочный проводник находится в левой верхней PV. Тогда абляция катетер расположен в Лос-Анджелесе, используя оболочку и провод в качестве руководствав Лос-Анджелесе. Л. ангиография выполняется над оболочкой. Круговой отображение катетер установлен с помощью длинной оболочки в Лос-Анджелесе и трехмерное (3-D) анатомические реконструкция выполняется ЛА. Ручка абляции катетер позиционируется в руке робота системы Amigo и начинает процедуру абляции. Во время процедуры абляции, оператор манипулирует абляции катетер через руки робота с использованием пульта дистанционного управления. Абляции выполняется путем создания точки от точки поражения-вокруг левой и правой PV Остии. Связаться с силой измеряется на кончике катетера, чтобы обеспечить обратную связь катетер тканей контакта. Проведение блок подтверждается записи PV потенциалы на круговой отображения катетера и расхаживать маневров. Оператор остается вне radiationfield во абляции. Вывод: новая система позволяет катетер абляции с высокой стабильностью на низкой оператора рентгеноскопии воздействия.
Введение
АФ является наиболее распространенным сердечной аритмии с преобладанием 1 - 2% в общей популяции. Симптомы включают учащенное сердцебиение, головокружение, одышка и снижение толерантности к физической нагрузке. Кроме того, риск инсульта значительно увеличивается у пациентов с ФП. За последние десять лет, ПВИ стал создана лечебная вариант лечения для пациентов, страдающих от АФ 1,2.
Основной принцип ПВИ является применение циркулярного поражения вокруг устья PV с радиочастотной (РЧ) энергии для создания электрического блока проводимости между PV и левого предсердия. Этот блок проводимости препятствует фибрилляции предсердий, которая запускается с помощью нерегулярной электрической активности, происходящих из PV. Тем не менее, трансмуральный поражений необходимы для достижения блока проводимости и применение трансмуральных поражений может быть сложной задачей. Re-проводимости и рецидива фибрилляции предсердий после катетерной аблации происходят в 20 - 40% случаев 1,2.
Как было показано недавно, достаточно контакта катетера тканей и стабильность катетера предпосылки эффективных поражений абляции 3,4. Многочисленные методы и абляции подходы были разработаны для улучшения катетера-стабильность, streerability и катетер-ткани контакт. Среди прочего, роботизированные системы представляют особый интерес. Преимущества и принципы робота абляции были обсуждены ранее 5-7. Эти системы могут не только улучшить стабильность катетера путем минимизации артефактов ручного манипулирования катетера, но также имеют преимущество пониженной рентгеноскопии воздействия на оператора, так как система управляется с помощью пульта дистанционного управления из-за пределов поля излучения. Роман роботизированная система с дистанционным катетера управляемость недавно были введены. Технико-экономическое обоснование и эффективность этой системы для ПВИ и других электрофизиологических процедур, таких как AV-узловой-спускаемого-tachcardia, аксессуаров путей или трепетание предсердий и предсердной или ventriculaR тахикардии был оценен 7-9. Значительное снижение оператора рентгеноскопии воздействия по сравнению с ручной абляции показано, в то время как все другие процессуальные параметры и уровень успеха в 12-месячного наблюдения до существенно не отличается 7.
Процедура отображения левого предсердия и PVI с использованием этой новой системы дистанционного катетера представлена здесь.
После получения сосудистого доступа через бедренную вену, межпредсердной перегородки транс-прокол с помощью длинного транс-перегородки оболочку и транс-перегородки иглы под контролем методом флюороскопии. После транс-перегородки прокол, иглу удаляют, а проволочный проводник место через транс-перегородки оболочкой в левой верхней легочной вены. Затем оболочка в втягивается обратно в нижнюю полую вену и абляция катетер расположен в Лос-Анджелесе, используя провод в качестве руководства к ямке ovalis и Лос-Анджелесе ("один-прокол, дважды доступ" -ТЕХНИКА). После того, как ablatioп катетер введен ЛА, оболочка перемещается вперед к ЛА, а также, проводник удаляется и удаление катетера расположен в левом желудочке. Левого предсердия ангиография выполняется над оболочкой, в то время как абляция катетер используется для высокой скорости стимуляции желудочков для повышения контрастности помутнение. После Л.А. ангиографии завершается, круглое отображение катетер установлен с помощью длинной оболочки в Лос-Анджелесе и 3-D-анатомической реконструкции, если ЛА осуществляется с использованием системы отображения. Круговой отображение катетер расположен в правой верхней PV записи PV потенциалы и подтвердить блок проводимости после PVI. Абляции катетер втягивается обратно из левого желудочка в левое предсердие и ручка абляции катетер позиционируется в руке робота системы Amigo. Во время процедуры абляции, оператор манипулирует абляции катетер через руки робота с использованием пульта дистанционного управления. Абляции осуществляется кресть точка за точкой повреждения вокруг левой и правой PV Остии. Проведение блок подтверждается записи PV потенциалы на круговой отображения катетера и расхаживать маневров.
История болезни
Выполните эту процедуру в пациентов с симптоматической лекарственной огнеупорный пароксизмальной ФП без каких-либо серьезных сопутствующих заболеваний и без предварительного кардиохирургии. Выполните предварительную диагностику, описанные ниже.
ДИАГНОСТИКА, ОЦЕНКА И ПЛАН
Диагностика АФ подтверждается неоднократными холтеровское ЭКГ, в том числе корреляции ФП и симптомами (учащенное сердцебиение, одышка, снижение толерантности к физической нагрузке). Если АФ записывается и симптомы сообщалось, несмотря на лечение, по крайней мере 1 антиаритмических, ПВИ для лечения симптоматической лекарственной огнеупорной AF в соответствии с фактическими руководящих принципов. ПВИ запланирован и письменное согласие получают от пациента. До PVI physiкал обследование, лабораторные испытания, чреспищеводной эхокардиографии и трансторакальная выполняются, чтобы исключить тромб левого предсердия и тяжелый структурный болезни сердца. Процедура ПВИ проводят в голодном состоянии при глубокой седации. Антагонисты витамина К прекращается за 5 дней до абляции, низкомолекулярный гепарин начинается, когда международное нормализованное отношение <2.
протокол
Протокол, представленные здесь стандартный подход роботов катетер абляции RCS на кафедре кардиологии, Шарите - Universitätsmedizin Берлин, Кампус Вирхов. Протокол и анализ процедур и результатов лечения пациентов был одобрен местным комитетом по этике Шарите - Universitätsmedizin Берлине.
1. Дистанционное катетер системы (РКС)
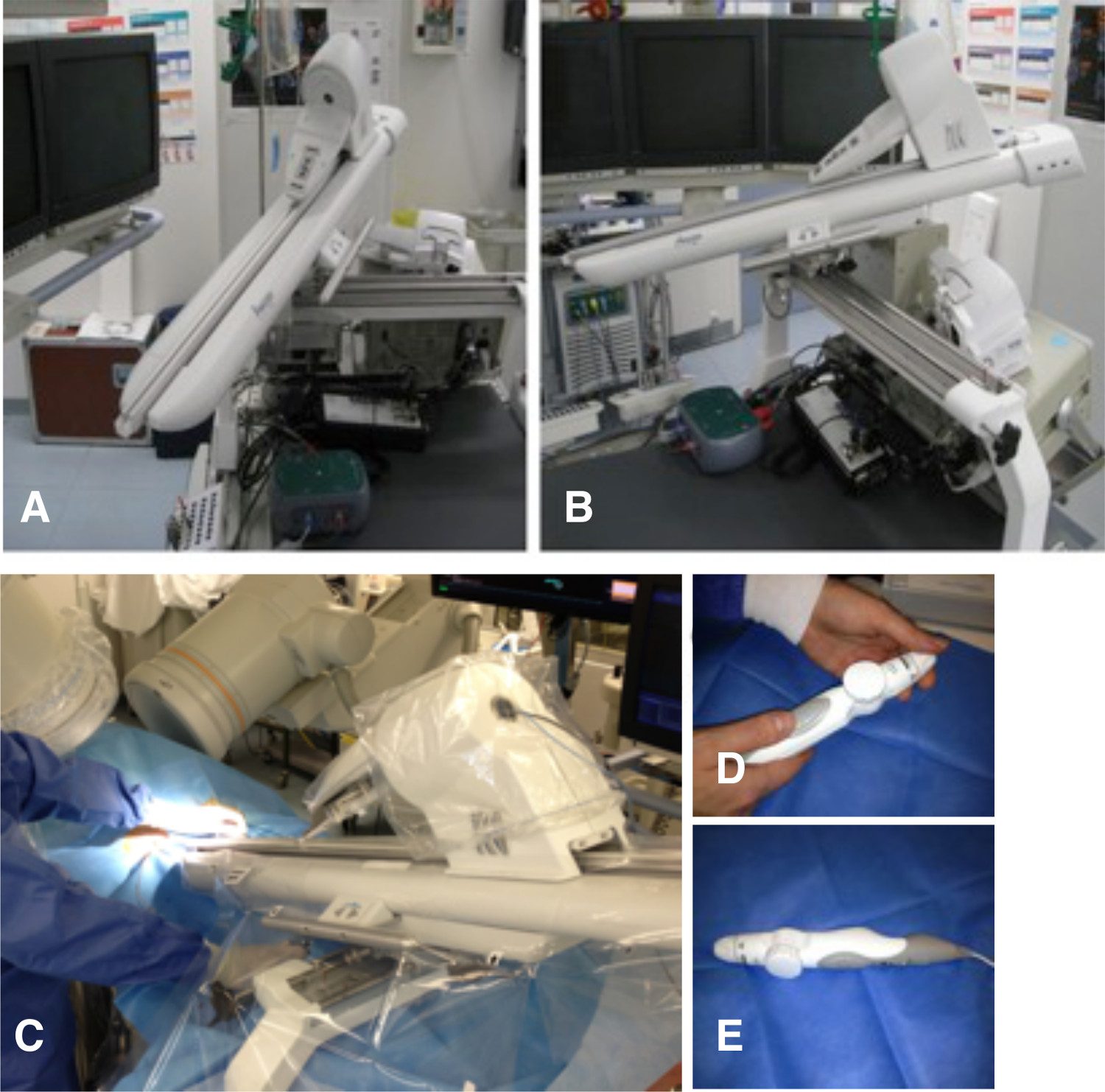
- Прикрепите роботизированную руку к операционному столу, как описано выше, 7 (рис 1).
Примечание: RCS состоит из дистанционного манипулятора катетера, который является манипулятор, который может быть перемещен с помощью пульта дистанционного управления. - Поместите абляции катетер в док-станции RCS. Манипулирование катетер с использованием пульта дистанционного управления, в то время как операционная врач остается вне поля излучения 7. Предварительная отозвать, вращать и отклонять катетер с использованием RCS.
2, Предварительно абляция Подготовка
- Расположите пациента на операционном столе и заставить глубокой седации с мидазолама (0.03 мг / кг болюс) и пропофола (непрерывное вливание 4 мг / кг / ч).
- Поместите датчик температуры в пищеводе для измерения температуры пищевода и предотвращения пищевода травмы.
- Приложить 12-канальной ЭКГ и поверхностных электродов системы 3D-карт на теле пациента.
- Перед началом процедуры убедитесь, что следующие материалы готовы.
- Транссептальный иглы (71 см) и 8,5 F SL0 оболочка с проводника. 6 F и F 7 25 см оболочка. Decapolar и круговой streerable диагностический катетер. Открытым орошаемых абляция катетер и генератор абляции.
- Кроме того, убедитесь, что контраст шприц и перикарда лоток доступны для острого лечения осложнений.
- Расположите манипулятор системы в стерильной драпировки и готов к использованию. Прикрепите Пульт дистанционного продолжениеролик к роботизированной руке (рис 1).
- Получение венозный доступ через двустороннего венозной пункции с 6 F, F 7 и F 8,5 оболочкой и поместить decapolar диагностический катетер в коронарный синус (КС).
- Выполните транссептальный прокол под флуороскопа помощью 8,5 F долгий SLO оболочку и 71 см транссептальный иглу.
- После транс-перегородки прокол, удалить иглу и ввести проводник через транс-перегородки оболочкой в левой верхней легочной вены. Затем нарисуйте назад ножны в нижней полой вене.
- Поставьте на 8,5 F долго СРО оболочки с проводом в левом предсердии (LA), с помощью проволоки в качестве руководства к ямке ovalis и Лос-Анджелесе ("один-прокол, дважды доступ" -ТЕХНИКА). Авансовые открытого орошаемых абляции катетер с 3,5 мм наконечником с измерением контактной силы через SR0 оболочки к Лос-Анджелесе.
- Администрирование гепарин со скоростью 15 МЕ / кг / ч после болюса 140 МЕ / кг для поддержания активированного времени свертывания (ACT) между 300 и 350 сек в течение всей процедуры.
- После того, как удаление катетера вступил LA, ввести оболочку в Лос-Анджелесе, а также. Удалить направляющую проволоку и расширитель оболочки SLO и поместите абляции катетер в левом желудочке. Выполните LA ангиографии над оболочкой, в то время как с помощью абляции катетер для высокой скорости стимуляции желудочков для повышения контрастности помутнение (Л. ангиография показана на рисунке 2А).
- Авансовые круговой отображение катетер с помощью длинной оболочки в LA (круговой отображения катетера, показанного на рисунке 2B).
- Выполнение 3-D анатомическую реконструкцию Лос-Анджелесе с использованием системы отображения и круговой отображения катетера. Создание 3-D-анатомической реконструкции ЛА путем перемещения круговой катетер на внутренней поверхности ЛА, все четыре клипов и ушка левого предсердия, при использовании автоматизированной системы отображения для регистрации движения по отношению к электрод (завершенае 3-D-карту показано на фиг.2С и D).
- Поместите круглую отображение катетер в правой верхней PV записать PV потенциалы и подтвердите блок проводимости после PVI. Отступать абляции катетер из левого желудочка в левое предсердие (конечное положение обоих катетеров, показанных на фиг.2В).
- Драпируйте RCS стерильной крышкой. Расположите ручку абляции катетер в руке робота системы Amigo.
3. Удаление Процедура
- Выполнение аблации ширины по окружности антрального абляции (WACA) с использованием максимальную температуру 43 ° C и максимальную мощность 35 Вт (перегородки) или 25 Вт (задней стенки) соответственно объявление расходом 17 мл / мин. Манипулирование абляции катетер с помощью робота-манипулятора с использованием пульта дистанционного управления из-за пределов поля излучения.
- Выполните абляции путем создания точки от точки поражения-вокруг левой и правой PV Остии. Мера контакт сила мажорING абляции. Использование локальной уменьшение амплитуды электрограмма записанный на кончике катетера абляции, ликвидации или диссоциации PV электрограмм на круговой катетера и вход / выход блока в качестве конечных точек абляции.
- Отметить все точки абляции по реконструкции 3-D.
- Подтвердите блок проводимости для каждого PV при записи потенциалов на круговой отображения катетера внутри PV (запись блока) и ходить внутри PV без захвата атриума (выход блока).
4. Порядок Сообщение абляции и восстановление пациента
- Остановка инфузии пропофола и удалить все катетеры.
- Измерьте активированного времени свертывания (ACT) и управлять 3000 IE протамин если ACT> 300 сек до удаления оболочки. Удалите оболочки и выполнять ручную сжатие на месте прокола в течение 10 мин и до остановки кровотечения. Поставьте давление одевания в пах и консультировать пациента, чтобы заложить еще в течение 8 ч.
- Передача patieщ шаг вниз блока и контролировать в течение 4 часов и до полного реагировать.
- Администрирование низкомолекулярный гепарин в качестве антикоагулянта до выписки. Начните пероральных антикоагулянтов (варфарин или прямой пероральные антикоагулянты) на следующий день после процедуры.
- Выполните трансторакальную эхокардиографии на следующий день после процедуры, как описано выше 17. Исключите перикардит и определить функцию клапанного аппарата сердца и фракция выброса левого желудочка 17.
Результаты
Конечная процедуры завершения электрическая изоляция всех клипов. Недавно было показано в исследовании 119 пациентов с, что процедурные параметры и результаты существенно не различались в процедурах с RCS (п = 40) по сравнению с стандартной механической подхода (п = 79). Статистический анализ (Манна-Уитни U-тест) не выявили существенных различий в продолжительности процедуры (159,1 ± 45,4 против 30,1 ± 146 мин, р = 0,19) общей поставки энергии (78146,3 26992,4 ± против 87963,9 79202,1 ± Ws, р = 0,57 ) и общее время рентгеноскопии (21,2 ± 8,6 против 23,9 ± 5,4 мин, р = 0,15). Тем не менее, оператор рентгеноскопии экспозиции была значительно снижена в группе RCS (13,4 ± 6,1 против 23,9 ± 5,4 мин, р <0,001) 7.
Кроме того, был проведен анализ первых 21 пациентов с ПВИ RCS. Характеристики пациентов и клинические данные приведены в таблице 1 . Этот анализ представляет собой один-центр опыт. Данные были проанализированы для серии 20 пациентов с ПВИ (данные от одного пациента был недоступен из-за технических причин). Статистический анализ процедурных параметров проводили с использованием Mann-Whitney U-тест. Результаты представлены в виде среднего ± стандартное отклонение (SD) для непрерывных переменных и в качестве и в процентах для дискретных переменных. Общая продолжительность процедуры была 137,3 ± 24,2 мин, общая рентгеноскопии раз был 26,1 ± 6,1 мин, оператор рентгеноскопии экспозиция была 14,8 ± 6,1 мин. Выделение легочных вен (ЛВ) была достигнута у всех пациентов с использованием удаленной системе. Сравнение продолжительности процедуры, общей рентгеноскопии времени и продолжительности экспозиции рентгеноскопии оператора между проводили анализ процессуальной улучшение с растущий опыт с техникой. Средняя продолжительность случаях 11 - 20 была значительно снижена по сравнению со случаями 1 - 10 (125,5 ± 18,1 против149 ± 24,6 мин, р = 0,029), в то время как сокращение общей рентгеноскопии времени (23,1 ± 6,4 против 28,7 ± 9,3 мин, р = 0,21) и оператора рентгеноскопии время экспозиции (12,9 ± 5,35 против 6,48 ± 17 мин, р = 0,2 ) не достигают значения (3 и 4). Измерение силы контакта не была выполнена. Не произошло никаких осложнений.
Эти первоначальные результаты позволяют предположить, что в левом предсердии и отображение ПВИ является возможным и эффективным. Выделение ЛВ была достигнута во всех случаях. Обучение было коротким со значительным сокращением времени процедуры в случае 11-20. Оператор рентгеноскопии экспозиции была значительно снижена.

Рисунок 1. Система дистанционного катетера. Кронштейн-манипулятор прикреплен к столу катетера до (А и В) ипосле (С) вставка абляции catheter.Handheld пульта дистанционного управления (D и E). Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 2. Изображения левого предсердия. Левого предсердия ангиографии в левой передней косой проекции с использованием оболочки SLO для ангиографии и абляция катетер для высокой скорости стимуляции желудочков (A). Круговая отображение катетера расположен в правой верхней легочной вены (B). 3-D-реконструкция левого предсердия. Круговой отображение катетер показано в правой верхней легочной вены. Левое предсердие показано на передне-задней (C) и правой боковой (D) зрения. Аби = абляция Catheтер, CS = коронарного синуса катетер ЗСНС = ушка левого предсердия, Л. = левое предсердие, левый = ЛНЛВ нижней легочной вены, LSPV = левый верхней легочной вены, ПНЛВ = правая нижняя легочная вена, RSPV = правая верхняя легочная вена. Пожалуйста, нажмите здесь Чтобы смотреть большую версию этой фигуры.
{kind=link}

Рисунок 3. Процессуальные данных для процедуры 1 - 10 против 11 - 20. Продолжительность процедуры (), общая рентгеноскопии время (Б), и оператор рентгеноскопии время экспозиции (С) процедуры 1 - 10 и 11 - 20. * статистически значимым ,

Рисунок 4. Порядок мажорвания и общая рентгеноскопии время процедуры 1 - 20.
| Исходные характеристики | |
| Количество пациентов | 21 |
| Возраст (лет) (SD) | 64.1 (8.5) |
| Мужчина (%) | 17 (81) |
| ИМТ (SD) | 28.1 (4.1) |
| Пароксизмальной ФП (%) | 14 (66,7) |
| Гипертония (%) | 16 (76,2) |
| САПР (%) | 5 (23.8) |
| Фракция выброса левого желудочка (%) (SD) | 56.9 (4.6) |
| Диаметр Л. (мм) (SD) | 42.4 (4.9) |
Таблица 1. Пациенты 'характеристики и клинические данные. Характеристики и клинические данные первых 20 пациентов, перенесших ампутацию автофокусировки с помощью пульта дистанционного cathetэ система в нашем центре. AF = мерцательная аритмия, CAD = заболевание коронарной артерии, Л. = левое предсердие, фракция выброса левого желудочка = фракция выброса левого желудочка
Обсуждение
Сообщалось группой Haissaguerre, что антральный ПВИ является лечебным средством для лечения пароксизмальной ФП 1,2,10. Более поздние данные по сравнению с PVI лечения пароксизмальной ФП в и нашли более низкую частоту рецидивов ФП после PVI сравнению с antiarrhythmia лечения после 2 лет наблюдения 11. Однако, как авторы суда RAAFT-2 заключить, частота рецидивов после обоих типов лечения высокого 11. Таким образом, улучшение техники необходимо.
Это уже обсуждалось раньше, что ручное управление катетер может привести к неточным движений катетер 5,7. Поэтому клинической интерес, если абляция с использованием роботизированного манипулятора является возможным и эффективным. С другой стороны, повышение стабильности может привести к серьезным осложнениям, таким как сердечная перфорации стенки и повреждения смежных структур. В ранее опубликованном исследовании, является Показано, что отображение в левом предсердии и PVIс RCS является возможным и эффективным. Нет основным осложнением не наблюдалось 7, подтверждая ранее опубликованные результаты по безопасности робота абляции 12,13. Оператор рентгеноскопии воздействия значительно ниже без снижения процессуальных показателей успешности 7.
Первый критический шаг транс-перегородки прокол. Существует значительный риск мерцательной перфорации стенки и сердечной тампонады, а также повреждение аорты. Прокол следует проводить в ямки ovalis под флуороскопа и с катетером CS как ориентир, чтобы минимизировать риск. Следующим важнейшим шагом является 3-D-реконструкция. Точность 3-D-изображения зависит от анатомии пациента, стабильности и катетера иммобилизации пациента. Таким образом, достаточно седативный пациента имеет решающее значение, чтобы избежать артефактов движения и создать надежный имидж. Третий критический шаг применение абляции поражений. Оптима стабильность катетер и стены контакты должны быть achieВЭД.
Одним из основных преимуществ RCS (по сравнению с другими роботизированными системами) является то, что можно переключиться в ручной абляции во время процедуры и обратно к роботизированной абляции. Это может быть очень полезно в случае анатомических аномалий или сложных структур (например, общая устье левых ЛВ). Оператор может выполнить ампутацию вручную в труднодоступных местах и использовать RCS для остальных абляции сайтов. Таким образом, переход от Robotic ручной абляции может быть решение для сложных ситуаций во время процедуры.
Как упоминалось ранее, измерение силы контакта можно добавить ценную информацию для оператора 7. В случае, представленном здесь, контактное усилие и катетер ткани контакт с использованием системы отображения оцениваются. Связаться с отображением сила может дополнительно увеличить эффективность и безопасность процедуры 14.
Важно отметить, что, несмотря на насе RCS некоторых этапах процедуры все еще должны быть проведены вручную, например транс-перегородки прокол и позиционирования круговой отображения катетера внутри легочных вен. Тем не менее, эти шаги как правило, может быть осуществлена быстро и не требуют длинные рентгеноскопии времени.
Кроме того, тактильная обратная связь отсутствует в течение роботизированной аблации. Врач должен полагаться на рентгеноскопии, 3-D реконструкции и измерения силы контакта. Исследования по использованию контактных измерений силы во время автофокусировки абляции показали, что тактильная обратная связь очень ограниченное значение для оценки контактной силы 15. Следовательно, измерение контактное усилие считается выше тактильной обратной связи с точки зрения эффективности. Тем не менее, значение тактильной обратной связи для конечных безопасности (например, профилактика мерцательной перфорации стенки) менее ясно, так как заболеваемость перфорации значительно ниже, чем заболеваемость рецидива ФП за П.В. пересоединения. ТМФчески, измерение контактной силы также должны предотвратить чрезмерно высокую силу и стены перфорации. Один предыдущая исследование показало сравнительно высокий уровень пищевода поражений после роботизированной AF абляции 16. Даже если отличается роботизированная система была использована и нет контакта сила не была измерена результаты исследования от Tilz др. Могут по крайней мере частично распространяется на RCS, используемые в нашем протоколе. Большие рандомизированные проспективные исследования отсутствуют, но многочисленные исследования по начальной опытом с RCS поддерживает мнение, что робот абляция с RCS является безопасным 7-9.
Мы здесь представляем протокол для роботов абляции ФП. В отличие от предыдущих исследований, мы используем катетер с измерением контактной силы для повышения безопасности и эффективности процедуры. Оператор рентгеноскопии воздействие может значительно быть уменьшено. Стабильность катетер, скорее всего, увеличивается и результаты сопоставимы с ручной абляции. Кроме того, переключение между руководстве Roboкрестики абляции легко, который является уникальным аспектом RCS. В заключение, удаление с использованием RCS может в будущих процедур оптимизации PVI, снизить облучение оператора излучения и повысить точность метода. Таким образом, робот абляция с RCS является перспективным подходом в лечении ФП.
Раскрытие информации
Free access to this article was sponsored by Catheter Robotics, Inc. Alexander Wutzler has received moderate lecture fees from Biotronik and travel grants from Boston Scientific. Leif-Hendrik Boldt has received moderate lecture fees from Catheter Robotics, St. Jude Medical and Boston Scientific.
Благодарности
The authors have no acknowledgements.
Материалы
| Name | Company | Catalog Number | Comments |
| Amigo Remote Catheter System | Catheter Robotics/Boston Scientific | Robotic system | |
| BRK transseptal needle (71 cm) | St Jude Medical | Needle for transseptal puncture | |
| 8.5 F SR0 sheath | Swartz/St Jude Medical | long sheath to access the left atrium and to provide stability for the ablation catheter | |
| 8.5 F SL0 sheath | Swartz/St Jude Medical | long sheath to access the left atrium and to provide stability for the LASSO catheter | |
| LASSO catheter + cable | Biosense Webster | Circular mapping catheter (7 F) to measure electrical activity in the pulmonary veins | |
| IBI inquiry decapolar catheter + cable | St Jude Medical | Coronary sinus catheter | |
| Thermocool SmartTouch | Biosense Webster | open-irrigated ablation catheter (7,5 F) with a 3,5 mm tip and contact force measurement, the tip is heated to apply thermal lesions in the left atril myocardium | |
| Heparin | Braun | 1. heparinized irrgation solution for preparation of the sheath,2. intravenous unfractionated heparin for procedural anticoagulation | |
| Propofol | Fresenius | Procedural sedation | |
| Midazolam | Roche | Procedural sedation | |
| NaCl solution | Braun | Irrigation solution for the ablation catheter | |
| CARTO | Biosense Webster | Mapping System and contact force measurement; this system allows a 3-D- reconstrcution of the left atrium and navigation of the moving catheter | |
| UHS-20 | Biotronik | Electrical Stimulator for stimulation of cardiac tissue via catehetr tip of the LASSO-, CS- or ablation catheter | |
| EP Shuttle | Stockert | Ablation Generator for application of energy and thermal lesion via the catheter tip | |
| 6 F sheath | Terumo | sheath to provide femoral access | |
| Lifepack 15 defibrillator | Physio Control | Defibrillator/monitoring device | |
| Pericardiocentesis set | variuous | Emergency set |
Ссылки
- Camm, A. J., et al. 2012 focused update of the ESC Guidelines for the management of atrial fibrillation: An update of the 2010 ESC Guidelines for the management of atrial fibrillation * Developed with the special contribution of the European Heart Rhythm Association. Eur Heart J. 33 (21), 2719-2747 (2012).
- Calkins, H., et al. HRS/EHRA/ECAS expert consensus statement on catheter and surgical ablation of atrial fibrillation: recommendations for patient selection, procedural techniques, patient management and follow-up, definitions, endpoints, and research trial design. J Interv Card Electrophysiol. 33, 171-257 (2012).
- Ouyang, F., et al. Recovered pulmonary vein conduction as a dominant factor for recurrent atrial tachyarrhythmias after complete circular isolation of the PVs: lessons from double Lasso technique. Circulation. 111, 127-135 (2005).
- Reddy, V. Y., et al. Low catheter-tissue contact force results in late pv reconnection—initial results from. EFFICAS I. Heart Rhythm. 8, S26 (2011).
- Nguyen, B. L., Merino, J. L., Gang, E. S. Remote Navigation for Ablation Procedures – A New Step Forward in the Treatment of Cardiac Arrhythmias. European Cardiology. 6, 50-56 (2010).
- Malcolme-Lawes, L. C., et al. Robotic assistance and general anaesthesia improve catheter stability and increase signal attenuation during atrial fibrillation ablation. Europace. 15 (1), 41-47 (2013).
- Wutzler, A., et al. Robotic ablation of atrial fibrillation with a new remote catheter system. J Interv Card Electrophysiol. 40 (3), 215-219 (2014).
- Datino, T., et al. Comparison of the safety and feasibility of arrhythmia ablation using the Amigo Robotic Remote Catheter System versus manual ablation. Am J Cardiol. 113 (5), 827-831 (2014).
- Khan, E. M., et al. First experience with a novel robotic remote catheter system: Amigo™ mapping trial. J Interv Card Electrophysiol. 37 (2), 121-129 (2013).
- Hocini, M., et al. Prevalence of pulmonary vein disconnection after anatomical ablation for atrial fibrillation: consequences of wide atrial encircling of the pulmonary veins. Eur Heart J. 26 (7), 696-704 (2005).
- Morillo, C. A., et al. Radiofrequency ablation vs antiarrhythmic drugs as first-line treatment of paroxysmal atrial fibrillation (RAAFT-2): a randomized trial. JAMA. 311 (7), 692-700 (2014).
- Rillig, A., et al. Persistent iatrogenic atrial septal defect after a single-puncture, double-transseptal approach for pulmonary vein isolation using a remote robotic navigation system: results from a prospective study. Europace. 12 (3), 331-336 (2010).
- Hlivák, P., Mlčochová, H., Peichl, P., Cihák, R., Wichterle, D., Kautzner, J. Robotic navigation in catheter ablation for paroxysmal atrial fibrillation: midterm efficacy and predictors of postablation arrhythmia recurrences. J Cardiovasc Electrophysiol. 22 (5), 534-540 (2011).
- Saliba, W., et al. Atrial fibrillation ablation using a robotic catheter remote control system: initial human experience and long-term follow-up results. J Am Coll Cardiol. 51 (25), 2407-2411 (2008).
- Haldar, S., et al. Contact force sensing technology identifies sites of inadequate contact and reduces acute pulmonary vein reconnection: a prospective case control study. Int J Cardiol. 168 (2), 1160-1166 (2013).
- Tilz, R. R., et al. Unexpected high incidence of esophageal injury following pulmonary vein isolation using robotic navigation. J Cardiovasc Electrophysiol. 21 (8), 853-858 (2010).
- Hahn, R. T., et al. Guidelines for Performing a Comprehensive Transesophageal Echocardiographic Examination: Recommendations from the American Society of Echocardiography and the Society of Cardiovascular Anesthesiologists. Anesth Analg. (1), 21-68 (2014).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены