
需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
TD Drive:一种参数化开源植入物,用于行为和睡眠大鼠的多区域电生理记录
摘要
在这里,我们提出了一种独特的、可 3D 打印的大鼠植入物,名为 TD Drive,能够进行对称的双侧线电极记录,目前同时在多达 10 个分布式大脑区域进行记录。
摘要
多个大脑区域之间错综复杂的相互作用是大脑的大多数功能的基础。学习过程以及记忆的形成和巩固是两个严重依赖大脑功能连接的例子。此外,研究半球的相似性和/或差异性与这些多区域交互密切相关。因此,试图进一步阐明这些复杂过程的电生理学研究依赖于同时且通常以双侧方式记录多个位置的大脑活动。这里展示的是一种名为 TD Drive 的大鼠 3D 打印植入物,能够对称地进行双侧线电极记录,目前同时在多达十个分布式大脑区域进行记录。开源设计采用参数化设计原则创建,允许潜在用户通过简单地调整高级参数(例如记录电极位置的前后和内外侧坐标)轻松使驱动器设计适应他们的需求。植入物设计在 n = 20 只执行不同任务的 Lister Hooded 大鼠中进行了验证。该植入物与联机睡眠记录和旷场记录(对象探索)以及使用两种不同的商业记录系统和头部在大型迷宫中进行无线记录兼容。因此,这里介绍的是新型电生理植入物的适应性设计和组装,有助于快速准备和植入。
引言
觉醒和睡眠期间大脑交互的多区域性质使得很难详尽地研究正在进行的生理过程。虽然功能性 MRI (fMRI) 和功能超声 (fUS) 等方法允许从全脑中采样大脑活动 1,2,但它们利用神经血管耦合从血流动力学活动推断大脑活动,从而限制了它们的时间分辨率2。此外,功能磁共振成像 (fMRI) 要求将研究对象放置在 MRI 扫描仪中,禁止对自由移动的动物进行实验。使用单光子或多光子成像对钙动力学进行光学成像,可同时对数百个神经元进行细胞类型特异性记录3。然而,头戴式显微镜(如 Miniscope3)确实允许自由移动,通常仅限于对完整大脑的浅表皮层区域进行成像4。虽然它们在皮层上的视场直径可能在 1 mm 左右,但这些头戴式显微镜的空间要求使其难以瞄准多个区域,尤其是相邻区域。因此,为了准确捕捉清醒和睡眠中的多区域大脑动力学,用植入感兴趣大脑区域的电极记录的细胞外电生理学是首选方法之一,因为它具有高时间分辨率和空间精度5。此外,它允许表征与从人类脑电图获得的分析相符的动物睡眠动力学,从而提高该方法的转化价值6。
传统上,使用细胞外电极记录大脑活动的研究采用单独的电极丝或电极束,例如四极管7。最先进的探针(如 Neuropixels 探针8 )允许同时靶向多个区域,因为它们在一个轴上对齐,允许沿该轴植入探针而不会损害动物。然而,准确同时记录多个空间分离的区域仍然具有挑战性,现有方法要么成本高昂,要么耗时。
近年来,立体光固化成型等增材制造方法已得到广泛应用。这使得研究人员能够开发出适应其实验要求的新型电极植入物9,例如,简化多个大脑区域的可重复靶向。通常,这些植入物设计也作为开源硬件与学术界共享,允许其他研究人员根据自己的目的进行调整。特定植入物的适应性程度因植入物的设计方式和共享方式而异。参数化建模10 是计算机辅助设计中的一种常用方法,其中设计的不同组件通过相互依赖的参数和定义的设计历史链接在一起。实施参数化方法来设计植入物可以提高其可重用性和适应性10,因为更改单个参数会自动更新完整的设计,而无需对设计进行复杂的重新建模。因此,设计本身必须以可编辑的格式共享,从而保留参数关系和设计历史。仅表示几何基元的文件格式 (如 STL 或 STEP) 会使已发布模型的后续参数化修改不可行。
虽然四极管超驱动器 11,12,13 可以记录数十个四极管,但它们的组装和植入是耗时的,而且它们的质量在很大程度上取决于研究人员个人的技能和经验。此外,它们通常将引导记录电极到目标位置的导管组合成一个或两个较大的束,从而限制了可以有效靶向的区域的数量和分布。
其他植入物14,15 暴露了完整的颅骨,并允许自由放置多个携带记录电极的单独微型驱动器。虽然在手术期间放置独立的微型驱动器16 最大限度地提高了灵活性,但它会增加手术时间,并且由于单个微型驱动器的空间要求,很难针对多个相邻区域。此外,虽然植入物是开源的,但它们仅作为 STL 文件发布,因此修改很困难。
具有更固有参数化理念的驱动器的一个例子是 RatHat17。通过提供覆盖整个颅骨背表面的手术模板,它可以精确定位多个大脑目标,而无需在手术过程中使用立体定向框架。套管、optrodes 或 tetrodes 有多种植入物变体可供选择。然而,虽然该驱动器可以免费用于学术目的,但它并不是开源发布的,这给研究人员评估和使用植入物带来了障碍。
本文介绍了 TD Drive(见 图 1),这是一种用于大鼠细胞外电极记录的新型 3D 打印植入物。TD Drive 旨在克服现有解决方案的一些缺点:它允许同时使用独立的电极线针对多个大脑区域,镜像到两个半球。由于其设计简单,经验不足的研究人员可以在几个小时内以相对较低的成本组装。TD Drive 以开源形式发布,采用易于修改的文件格式,使研究人员能够根据自己的特定需求进行调整。从 TD Drive 的设计过程开始就采用参数化 3D 建模方法,可以将必要的参数更改抽象出来:要更改目标位置,研究人员只需编辑代表其背腹和前后坐标的参数,而无需重新设计驱动器本身。修改和制造 TD Drive 的文件可以在 https://github.com/3Dneuro/TD_Drive 中找到。

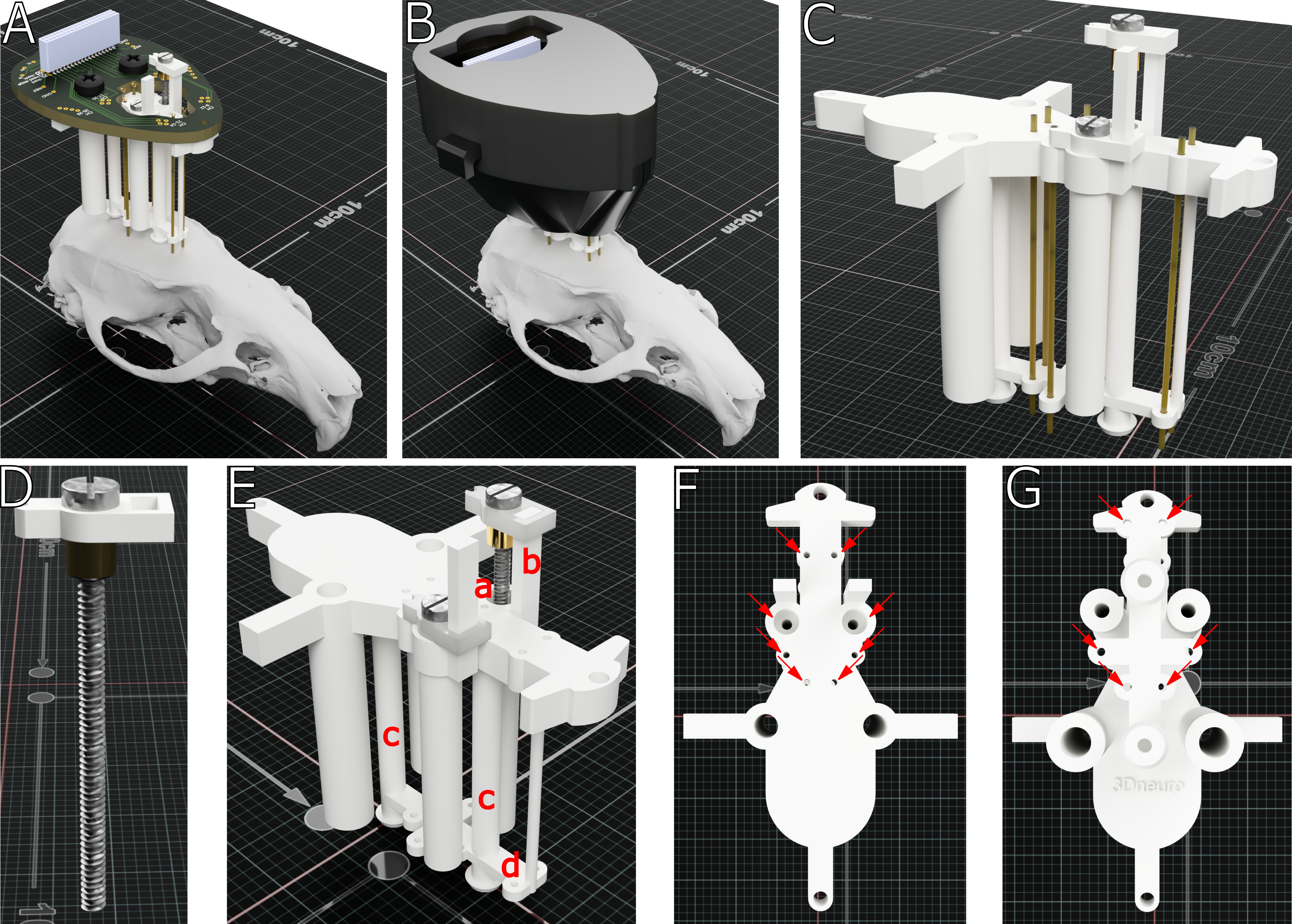
图 1:TD Drive 概述。 (A) 带保护盖的 TD Drive 的效果图。(B) 显示内部零件的渲染。TD Drive 具有 (a) 多个参数可调的记录位置,用于固定和可移动的电极线,一个带有 (b) 与常见系留和无线数据采集系统兼容的高密度 Omnetics 连接器的 EIB,以及 (c) 针对 Intan/Open Ephys 系统的记录优化的直观通道映射(参见 补充图 1)和 (d) 一个盖子,用于在联机录音和未连接 Headstage 时保护植入物。(C) TD Drive 底部的导向模板有助于放置导向插管,并作为手术过程中植入物位置的冗余验证。 请单击此处查看此图的较大版本。
{kind=link}
植入物设计在 n = 4 中进行了试点,在 n = 8 中进行了验证,并在执行不同任务的 n= 8 只 Lister Hooded 大鼠中得到确认。前 4 只动物用于开发驱动器和调整参数。然后,对 8 只动物进行了完整的试点(如结果所示)。运行了第二组 8 只动物,并将其纳入植入物存活分析。该植入物与联机睡眠记录和旷场记录(对象探索)以及使用两种不同的商业记录系统和头部在大型迷宫(HexMaze 9 m x 5 m)中的无线记录兼容。这两组 8 人使用两种不同的采集系统进行记录 - 联机用于更长的睡眠记录和无线用于大型迷宫探索记录。我们可以得出结论,这种简单的线驱动允许经验不足的研究人员对更大的队列进行长时间的实验,以实现睡眠阶段分析以及多个大脑区域的振荡分析。这与迄今为止的大多数电生理植入物形成鲜明对比,由于难度和时间强度,允许较小的动物队列,并且通常需要非常有经验的实验者。然而,通过这种驱动器,无法记录单个神经元的活动;因此,其用途仅限于研究局部场电位 (LFP) 和求和活动。
研究方案
这项研究得到了荷兰中央委员会Dierproeven(CCD)的批准,并根据《动物实验法》(协议代码:2020-0020-006和2020-0020-010)进行。使用到达时 9-12 周龄的雄性 Lister Hooded 大鼠。实验方案中使用的试剂和设备列在 材料表中。有关驱动器构建过程的步骤,请参见 补充图 1 和 补充图 2 。
1. 调整和创建 3D 模型和电极接口板 (EIB) 数据
- 在 Autodesk Fusion 中打开驱动器体设计。单击 Modify 选项卡下的 Change Parameters。通过在 anteroPosteriorSite1 中输入前后坐标,在 medioLateralSite1 中输入内侧坐标来调整第一个记录位置的坐标。可以通过调整直径来调整导管或电极的孔直径Site1。对录制位置 2 和 3 重复此操作,模型设计将自动调整。
注意:当前协议使用的三个位置是海马体 (HPC),包含可移动的金属丝束,以及前额叶 (PFC) 和脾后 (RSC) 皮层,两者都具有固定的金属丝束(PFC 金属丝束同时针对前边缘 (PRL) 和前扣带回 (ACC) 皮层)。 表 1 提供了对控制记录站点中外侧坐标的参数的手动限制。 - 通过在浏览器中右键单击更新的驱动器体并选择 Save As Mesh 来导出更新后的驱动器体。选择类型 STL (binary)、单位 mm 和 refinement high。
- 为常规上限选择准备好的 STL 文件,或者如果需要(例如,当目标非常横向时),为大上限选择准备好的 STL 文件。
- 根据选择的上限,选择常规或大型 EIB 进行生产。这两个 EIB 的 Gerber 生产文件都以 zip 存档的形式提供,可以直接发送到制造服务。
2. 打印 3D 模型并制造 EIB
注意:在本研究中,使用市售的 3D 打印机来生产部件(参见 材料表)。当使用不同的打印机或外包生产时,可能需要使用不同的、类似的树脂来生产零件。
- 使用立体光固化成型技术9 在层高为 25 μm 的普通或生物相容性树脂(例如透明、黑色或白色树脂)中以高分辨率打印驱动器体和穿梭车。使用坚固而坚固的树脂(例如 Tough 2000)打印瓶盖部件。
- EIB 要么在内部制造,要么由外部服务提供商生产。使用 SMD (Surface Mounted Device) 焊接技术将高密度连接器焊接到 EIB。
注意:如果缺乏焊接精细电子元件的经验,建议在外部进行焊接,例如,在大学的电子车间或商业供应商处进行焊接。通过在连接器周围涂上强力环氧树脂来加固焊接的高密度连接器。小心不要用环氧树脂覆盖电极的孔。
3. 3D 打印体的后处理
注意:瓶盖和梭子不需要后处理。根据 3D 打印件的质量,它们可能需要轻轻打磨或去除残留的支撑痕迹。打磨和钻孔时,注意不要打破驱动体的壁。如有必要,用异丙醇和软布和/或压缩空气清洁后处理部件。
- 用安装在针虎钳中的 0.5 mm 钻头在驱动体的顶部和底部钻出导管孔。这可确保维度在站点之间正确且一致。
- 使用针虎钳中的 2 mm 钻头在驱动器体上钻出两个埋头孔(如图 2E 所示),用于梭式黄铜嵌件。
- 用压缩空气清洁钻孔碎片上的埋头孔。然后用 M1 丝锥敲击梭形螺钉的导向孔,这些螺钉是埋头孔的延伸。在两次或多次迭代中执行攻丝,在两次迭代之间清除丝锥和孔上的碎屑。可选择用一滴矿物油润滑水龙头。
- 用压缩空气清洁驱动器体上的钻孔和攻丝碎屑。

图 2:TD 驱动器的渲染图。 (A,B) 大鼠头骨模型上的 TD 驱动器 (A) 没有和 (B) 带保护帽。(C) 聚酰亚胺导管正确插入六个记录位点中的每一个。(D) 一个孤立的、完整的穿梭组件,具有导向螺钉、3D 打印穿梭和焊接黄铜嵌件。(E) 插入两个滑块的 TD Drive 体。用红色标记:(a) 穿梭车的埋头孔,(b) 穿梭导轨,(c) 驱动体的中心基座,(d) 导轨模板。(F,G)驱动器主体顶部 (F) 和底部 (G) 上可能需要在 3D 打印后进行后处理的重要位置分别用红色箭头表示。 请单击此处查看此图的较大版本。
{kind=link}
4. 穿梭车组件
- 将 3D 打印的梭子滑到 M1x16 螺钉上。使用 M1 黄铜嵌件将 3D 打印的梭子固定到位。穿梭车需要能够在放置嵌件后自由旋转,而无需上下移动。
注意: 以下步骤包含烧伤危险(焊接)。根据所使用的焊料和助焊剂,它们可能包括接触呼吸道刺激物和铅。焊接时始终佩戴护目镜(因为焊料可能会飞溅),并遵循安全处理潜在有害物质的适当准则,包括工作场所的适当通风以排出焊接烟雾。请遵守当地法规和操作程序,或在线查阅可用材料18,19。 - 使用少量焊膏,将黄铜嵌件焊接到螺钉上。注意不要使嵌件和螺钉过热,以免熔化 3D 打印的梭子。根据用于 3D 打印穿梭车的树脂,很难避免少量熔化(以及随后的穿梭车粘在嵌件上)。
注意:使用不锈钢螺钉时,可能需要助焊剂。建议使用黄铜或机械钢螺钉,因为它们更容易焊接。 - 梭子组件冷却后,轻轻地将 3D 打印的梭子绕螺钉旋转多次。如果梭子在焊接过程中熔合到嵌件上,这应该会释放它。
注意: 确保梭子可以自由旋转并且不会晃动。如果是这样,则丢弃穿梭车组件并启动新的组件。小心地尝试旋转黄铜嵌件。如果它相对于螺钉旋转,请重复焊接过程。
5. 组装驱动器
- 将市售聚酰亚胺管切割成大约 25 mm 的长度,但至少要足够长以穿过整个驱动器体。
- 将聚酰亚胺导管插入驱动器主体。每根管子应通过驱动器顶部的一个孔和驱动器底部导向模板上的相应孔( 图 2E 中的“d”)插入。应插入管子,直到它们与驱动器体的顶部齐平。
- 使用细针或牙签,将少量液体氰基丙烯酸酯胶涂抹在驱动体顶部的孔中,以将导管固定到位。从本体底部涂抹胶水,以避免胶水流入导管。胶水将通过毛细管力吸入驱动体和导管之间的空间,从而将两者连接起来。
- 在驱动体底部的导管和导向模板之间的接口处涂抹少量氰基丙烯酸酯胶。同样,注意不要用胶水堵塞导管。让胶水干燥几分钟。
注意: 所需的确切时间取决于驱动材料以及驱动体和导管之间的间隙。一般来说,5-10 分钟就足够了。 - 将驱动器本体倒置并切割底部的聚酰亚胺导管,使其超出驱动器本体的中心基座约 1 毫米( 图 2E 和 补充图 2 中的“c”)。在这种配置中,导管的末端将在植入时与大脑表面齐平。
注意:该驱动器旨在针对大脑的更深区域。如果针对浅表皮质区域,则可能需要较短的聚酰亚胺导管,以免在初始脑肿胀时损伤脑表面。 - 在驱动器主体中插入两个梭子组件。将它们拧入螺纹导向孔时,确保螺钉与梭式导轨平行( 图 2E 中的“b”)。用手指轻轻地将穿梭车与穿梭车导轨对齐。
- 将梭子完全拧入埋头孔中,以验证梭子组件的黄铜嵌件不会卡在驱动器体中或与聚酰亚胺导管碰撞。对于此协议,需要至少 16 个完整的转弯距离。如果未达到此目标,请进一步切割驱动器主体顶部的聚酰亚胺管以创造更多空间。不要将驱动器体中的梭子拧得过紧 - 这会破坏驱动器体上的卡住螺纹和梭子组件的焊接连接。
注意: 如果穿梭组件卡住,请将其完全拆下并检查焊接连接是否松动。在这种情况下,请使用新的穿梭组件。如果梭子组件与导管碰撞,请缩短导管,使其不会超出驱动体。 - 使用 M2.5x5 聚酰亚胺螺钉将 EIB 拧到驱动器体上。在驱动器体和 EIB 之间滴几滴氰基丙烯酸酯胶水。确保不要堵塞用于电极连接的通孔。
6. 准备保护罩
- 将不锈钢 M2 螺母插入左盖半部的挤压件中,并用氰基丙烯酸酯胶固定。
- 如有必要,用 M1 钻头在针虎钳中钻出左帽前部的孔。用 M1 水龙头敲击右盖前部的孔。
7. 准备电极丝
- 准备两个金属板作为创建电极丝束的表面。这些板用作平坦、稳定但可移动的表面,线束组装、粘合和切割将在其上进行。将绘图纸贴在第一个印版上,并将两条粘性画家胶带打结到第二个印版上,粘性表面朝上。
- HPC 束中的四根导线中有三根将以 60 度角切割,以在背腹方向产生偏移。这将允许分别在海马锥体层的上方、内部和下方放置一根电线。为了便于剪切,请在绘图纸上画一条角度为 60 度的清晰线(60 度线)。
- 对于每个 HPC 电极束,剪下 4 根电极丝,每根长度为 4.5 厘米。对于每个 PFC 和 RSC 电极束,剪下 4 根电极丝,每根长度为 3.5 厘米。
- 用指尖轻轻地捡起 4 根电线(它们会粘在上面),然后将它们尽可能靠近地放在画家的胶带上。确保不要将它们放在一起。
- 在显微镜下,使用镊子将电线尽可能靠近。在捆扎顶部的前 2 厘米处涂上一层薄薄的液体氰基丙烯酸酯胶。对于 HPC 束,将胶水> 2 厘米处,< 3.5 厘米处粘合。等待胶水干燥。
- 在显微镜下用一些镊子轻轻触摸电线。如果它们没有分开,则它们被正确粘合。作为完整性检查,请确保胶水层在显微镜的照明下发光。
- 完全干燥后,从胶带上取下线束,并将其与绘图纸一起转移到板上。在显微镜下,检查线束顶部或侧面是否有多余的胶水,然后用手术刀刀片小心地将其取出。
- 对于 RSC 束,在阵列底部垂直于导线方向进行直线切割。
- 对于 HPC 束,将数组放在绘图纸上,使其与 60 度线相交,然后使用该线作为参考线,使切割角度与导线方向成 60 度角。
- 然后,使用手术刀刀片小心地将 4 根电线中最短的一根从线束上劈开。垂直于电线方向切割电线,与线束中第二长的电线相比,将其缩短到大约 0.75 毫米。
- 对于 PFC 束,将阵列底部拆分为两个 2 线束。确保两根电线粘在一起。垂直于导线方向切割,将 2 线束中的一根缩短 1 mm。有关切割线束的图像,请参见 补充图 1 (底部)和 补充图 2b 。
8. 准备地线和脑电线
- 将至少 10 个 SIP/DIP 引脚从 1.27 mm 间距互连的 SIP/DIP 插座料带中推出。
- 剪下 2 根 6 cm 长的接地 (GND) 线。剪下 8 块 6 厘米长的脑电图线。使用手术刀刀片小心地去除所有电线两端的一些绝缘层。
- 将 M1x3 不锈钢螺钉放在第三只手中,在螺钉头下方留出尽可能多的空间。将 GND 或 EEG 线的去绝缘侧缠绕在螺钉的柄上,就在螺钉头的正下方。
- 用小针头或牙签涂抹少量助焊剂。将电线焊接到螺钉上。确保不要意外堵塞螺丝头的槽。
- 将 SIP/DIP 引脚放在第三只手上,以便可以接触到母头。将导线另一侧的去绝缘部分插入 SIP/DIP 引脚。涂抹少量助焊剂并将导线焊接到引脚上。
- 从支架上拆下焊接的螺丝线组件。该组件将在植入手术期间植入颅骨。
- 将另一个 SIP/DIP 引脚放入支架中,旋转 180 度(即,公头侧可触及)。涂抹少量助焊剂,并将另一根电线的脱绝缘侧焊接到引脚的公侧。
- 从支架上拆下焊接的线针组件。该组件稍后将连接到 EIB,螺丝线组件和线针组件将在植入手术期间使用它们的两个引脚相互连接。
- 为了加强焊接连接,请在电线和引脚之间的连接处涂抹少量氰基丙烯酸酯胶。
- 胶水干燥后,验证两个组件的 SIP/DIP 引脚是否可以顺利连接。使用万用表的检查连续性选项来验证当两个组件都连接时,螺钉和线针组件的去绝缘线端之间是否存在连续连接。或者,用指甲油对每组电线进行颜色编码(参见 材料表),以简化种植手术过程中的正确连接。
9. 将线束装入驱动器
- 将驱动器连接到支架上。在此步骤中,请注意不要对 EIB 施加太大压力或损坏高密度连接器。
- 一旦驱动体处于稳定位置,拿起其中一根线束,小心地用手或使用一对细镊子将其滑入相应的聚酰亚胺管中。确保线阵列放置在正确的方向上(例如,对于 PFC 阵列,阵列的两条较长的导线应面向内侧),并注意不要弯曲线阵列。
- 对所有其他线束重复最后一步。
- 用细镊子抓住其中一根电线,小心地将其弯曲到想要插入的孔中。插入后,使用金针将其固定到 EIB 孔中。对束的所有导线和所有束重复此操作。
- 确保在此阶段,电线在 EIB 上方形成一个漂亮的环(这样,仍有空间在聚酰亚胺管上上下移动线束,以调整管底部的长度),并且从聚酰亚胺管底部伸出的阵列不会意外弯曲。确保记下每个线束的哪根电线连接到 EIB 上的每个通道。有关 TD Drive 的通道映射的详细说明,请参见 补充图 1 。
注意: 或者,在加载每个线束(步骤 9.2)后,可以直接将电线连接到 EIB(步骤 9.4),然后对其余线束执行步骤 9.2 + 9.4。这可以根据实验者的个人喜好而变化。有关加载的 TD Drive 的示例,请参见 补充图 2b 。
- 确保在此阶段,电线在 EIB 上方形成一个漂亮的环(这样,仍有空间在聚酰亚胺管上上下移动线束,以调整管底部的长度),并且从聚酰亚胺管底部伸出的阵列不会意外弯曲。确保记下每个线束的哪根电线连接到 EIB 上的每个通道。有关 TD Drive 的通道映射的详细说明,请参见 补充图 1 。
- 通过轻轻地将线束推入或拉出导管,调整线束的长度以正确定位记录位置(参见 补充图 2d)。
注意:由于导管被切割为与大脑表面齐平,因此线束伸出导管的距离对应于目标区域的背腹位置。可移动的 HPC 线束应与导管底部齐平,固定的 RSC 线束应伸出 1.5 mm,固定的 PFC 线束应伸出导管 3.5 mm。推拉电线组件时,请注意不要将单根电线从顶部的 EIB 中拉出,也不要弯曲线束的底部。 - 当固定线阵列(RSC 和 PFC)对齐后,在导管顶部涂上少量强力环氧树脂胶,将线束粘合到位。当环氧树脂固化时,确保线束在底部仍正确对齐。
- 要固定可移动的 HPC 线阵列,首先将梭子移动到最高要求的位置(在本文描述的实验中,至少比最低位置高出 16 圈/4 mm)。然后将线束推入梭子的 U 形开口中,并用少量强力环氧树脂胶将它们粘合到位。
注意:确保环氧树脂不会沿着束流到聚酰亚胺管中。环氧树脂固化后,在同一位置涂上第二层环氧树脂,以加强连接,并使连接在穿梭车移动时不太可能断裂。 - 小心地将 GND 线的线针组件的开口端插入标有 GND 的通孔之一。使用金针固定。
注意: 当使用 GND 和参考 (REF) 通道短路的 Headstage 时,如果更方便,也可以使用 REF 通道。 - 从支架上取下驱动器;注意不要弯曲任何电线组件。将驱动器的前面板重新安装到同一个支架中,并将 4 个 EEG 线针组件插入 EEG 通道的通孔(标记为 2、4、29、31),并分别用金针固定它们。
- 对于所有 GND 和 EEG 线,在连续性设置上使用万用表来验证 EIB 上的金引脚与连接的线针组件的引脚之间的连续连接。
- 存放驱动器。例如,可以通过将盖子连接到驱动器主体并将其倒置存放来实现。
注意:在手术植入之前,使用乙醇对驱动器底部进行消毒。所有接骨螺钉和 GND/EEG 线组件都应在乙醇中消毒。手术器械应 通过 高压灭菌器进行消毒。
10. 驱动种植手术
注意:此步骤简要概述了植入 TD Drive 的外科手术程序。更广泛的植入方案,包括工具描述以及药物的剂量和浓度,可以在 补充文件 1 中找到。
- 按照当地机构指南对手术工具进行消毒,并对手术区域进行清洁和消毒。要对植入物进行消毒,请将将与大脑接触的电极丝部分放入乙醇中至少一分钟。
注意:长时间暴露在乙醇或其烟雾中会削弱氰基丙烯酸酯胶。如果烟雾没有被捕获,请延长电线在乙醇中的浸泡时间。为了验证胶水的完整性,建议使用实际实验中未使用的测试植入物找到最佳时间。 - 根据机构和当地指南提供必要的抢先镇痛、抗生素和气体麻醉(异氟醚)。
- 将大鼠放入立体定向装置中。剃掉头顶,用聚维酮碘消毒皮肤。皮下注射局部麻醉剂(利多卡因),并在中线顶部的颅骨上做一个小切口。
- 通过将皮肤拉到一边来露出头骨。去除颅骨顶部的结缔组织,擦干并清洁颅骨表面。轻轻分离颅骨侧面的肌肉,以便放置锚固螺钉。
- 测量前囟和 lambda 坐标。为了精确定位,通过测量前囟和 lambda 背腹位置的差异,确保颅骨表面平行于立体体的前后-中外侧平面。如果坐标不同,则通过升高或降低吹嘴来调整老鼠在立体中的位置。
- 在目标位置(前边缘皮层(AP +3.5 毫米和 ML + -1 毫米)、脾后(AP+5.8 毫米和 ML +-1 毫米和海马体(AP -3.8 毫米和 ML + -2.5 毫米))周围标记开颅手术。
- 为 GND/EEG 螺钉和锚固螺钉钻孔。插入螺钉并用液体牙科丙烯酸覆盖它们。钻开颅手术并小心去除硬脑膜。通过涂抹无菌盐水来防止开颅手术变干。
- 小心地将 TD Drive 放置在开颅手术的顶部,确保导管与颅骨齐平。用凡士林保护导管,并用牙科丙烯酸将 TD Drive 连接到颅骨上。
- 将靶向 HPC 的线阵列从其初始位置(距脑表面 ~1.5 毫米 DV)缓慢降低到海马 CA1 的锥体层。在大鼠恢复期的信号检查期间,在随后的几天里逐渐到达金字塔层。
- 将保护盖放在驱动器周围。
- 关闭气体麻醉并将大鼠从立体定向框架中取出。将大鼠放在加热室内的干净笼子中,并提供湿粮和水以供回收。监测老鼠,直到它再次活跃,在笼子里移动,进食和饮水。
- 把老鼠带回住房。根据机构指南提供术后镇痛和护理。例如,请参阅 补充文件 1 中的手术方案示例。
11. EIB 恢复
- 实验结束时,恢复驱动器并取下保护盖。
- 取下金针并小心连接电极丝。从驱动器主体上拧下 EIB。通过在 EIB 和驱动器体之间轻轻推动软镊子或用手小心地提起 EIB,释放将 EIB 固定在主体上的剩余氰基丙烯酸酯键。
- 清洁 EIB 和金销,以便在后续的 TD Drive 植入物上重复使用。在重复使用 EIB 之前,请检查金引脚通孔和高密度连接器是否磨损。只有当过孔完好无损以允许金引脚、电极线和 EIB 之间有良好的连接,并且高密度连接器与头部的连接仍然足够稳定时,才重复使用 EIB。
结果
使用协议中提供的说明,多个实验人员可以轻松构建 TD Drive。在驱动开发 (n = 4) 之后,对 8 只动物进行了一次完整的试验。另外一批 8 只动物被植入,并进行了实验数据收集。由于尚未完成对这些动物的数据分析,因此它们已被纳入生存分析,但未包含在其他分析(例如,靶向或组织学)中。到达后 2 周进行种植手术(参见 图 3A 了解试点中使用...
讨论
本文介绍了一种适应性强的植入物,用于自由移动大鼠的双侧、对称多区域焊丝电极记录。
通过更改预定义参数轻松调整植入物的能力是创建 TD Drive 的动机之一。虽然旨在最大限度地提高参数变化的灵活性,但它们之间关系的固有约束必然会限制这种适应性。默认情况下,前后参数没有设置任何限制,这些坐标由逻辑站点间交互和驱动器主体的整体...
披露声明
TS 和 PvH 是荷兰奈梅亨 3Dneuro 的员工。3Dneuro 共同开发并生产 TD Drive。
致谢
作者要感谢 Angela Gomez Fonseca 为开发该驱动器提供的灵感,以及所有用动物进行试点实验的学生 Milan Bogers、Floor van Ravenswoud 和 Eva Severijnen。这项工作得到了荷兰研究委员会 (NWO;分频节目 17619 “INTENSE”)。
材料
| Name | Company | Catalog Number | Comments |
| 0.5 mm drill bit | McMaster | 2951A38 | |
| 1.27 mm pitch interconnected SIP/DIP socket (Mill-Max) | Mouser Electronic | 575-003101 | For essembling and connection of EEG & GND screws |
| 5 minute epoxy | Bison | Commercially available | regular off-the-shelf epoxy |
| cyanoacrylate glue | Loctite | Super Glue-3 | |
| EEG wire | Science Products GmbH | 7SS-2T | |
| Electrode wire | Science Products GmbH | NC7620F | |
| Ethanol | LC | For standard pre-operative sterilization procedure of drive | |
| Fine forceps (5) | FST | 91150-20 | For wire bundle preperation and handling |
| Form 3B | Formlabs | 3D printer used to 3D print the self-printed parts of the TD drive | |
| Gold pins (small) | Neuralynx, Inc. | 9885 | Attachment of electorde wires to EIB board |
| Ground wire | Science Products GmbH | SS-3T/A | |
| High-density connector | LabMaker GmbH/Omnetics | A79026-001 | |
| Lister Hodded rats | Charles River Laboratories | Crl:LIS | we used male rats, 9-12 weeks of age at arrival |
| M1 brass insert | AliExpress | Commercially available | https://aliexpress.com/item/33047616164.html |
| M1 tap | McMaster | 2504A33 | |
| M1x16 screw | Bossard | 1096613 | |
| M1x3 stainless steel screws | Screws and More | 84213_14985 | |
| M2.5x5 polyimide screws | Screws and more | 7985PA25S_50 | |
| mineral oil | McMaster | 1244K14 | |
| Nail polish | Etos | Commercially available | For color coding EEG and GND wires |
| painter's tape | Gamma | Commercially available | For wire bundle preperation |
| Pin vise | McMaster | 8455A16 | |
| plotting paper | Canson | Commercially available | For wire bundle preperation |
| polyimide tubes | Amazon / Small Parts | TWPT-0159-30-50 | AWG, 0.0159" ID, 0.0219" OD, 0.0030" Wall, 30" Length |
| RHD 32-channel headstage with accelerometer | Intan Technologies, LLC | C3324 | For tethered recordings in the sleepbox |
| RHD 3-ft (0.9 m) standard SPI cables | Intan Technologies, LLC | C3203 | From commutator to headstage |
| RHD 6-ft (1.8 m) standard SPI cables | Intan Technologies, LLC | C3206 | From OpenEphys box to commutator |
| Slip Ring with Flange | Adafruit | 1196 | Commutator: 22 mm diameter, 12 wires |
| Solder flux | Griffon S-39 50 ml | Commercially available | For soldering EEG & GND screws |
| soldering paste | Amazon | B08CBZ5HC5 | |
| stainless steel M2 nut | McMaster | 93935A305 | |
| Tethered recording setup | OpenEphys | Acquasition Board | |
| Wireless recording logger | SpikeGadgets | miniLogger 32 | For wireless recordings in the task |
| Wireless recording setup | SpikeGadgets | Main Control Unit (MCU) incl. breakout board and RF transceiver | For wireless recordings in the task |
参考文献
- Deffieux, T., Demené, C., Tanter, M. Functional Ultrasound Imaging: A New Imaging Modality for Neuroscience. Neuroscience. 474, 110-121 (2021).
- Finn, E. S., Poldrack, R. A., Shine, J. M. Functional neuroimaging as a catalyst for integrated neuroscience. Nature. 623 (7986), 263-273 (2023).
- Aharoni, D., Federico Guo, C. Aharoni-Lab/Miniscope-v4: Release for generating. GitHub. , (2023).
- Takasaki, K., Abbasi-Asl, R., Waters, J. Superficial bound of the depth limit of two-photon imaging in mouse brain. eNeuro. 7 (1), (2020).
- Buzsáki, G., et al. Tools for probing local circuits: High-density silicon probes combined with optogenetics. Neuron. 86 (1), 92-105 (2015).
- Lacroix, M. M., et al. Improved sleep scoring in mice reveals human-like stages. bioRxi.v. , (2018).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Sci New Ser. 261 (5124), 1055-1058 (1993).
- Jun, J. J., et al. Fully integrated silicon probes for high-density recording of neural activity. Nature. 551 (7679), 232-236 (2017).
- Headley, D. B., DeLucca, M. V., Haufler, D., Paré, D. Incorporating 3D-printing technology in the design of head-caps and electrode drives for recording neurons in multiple brain regions. J Neurophysiol. 113 (7), 2721-2732 (2015).
- Camba, J. D., Contero, M., Company, P. Parametric CAD modeling: An analysis of strategies for design reusability. Comput Aided Des. 74, 18-31 (2016).
- Kloosterman, F., et al. Micro-drive array for chronic in vivo recording: Drive fabrication. J Vis Exp. (26), e1094 (2009).
- Voigts, J., Siegle, J. H., Pritchett, D. L., Moore, C. I. The flexDrive: An ultra-light implant for optical control and highly parallel chronic recording of neuronal ensembles in freely moving mice. Front Syst Neurosci. 7, (2013).
- Voigts, J., Newman, J. P., Wilson, M. A., Harnett, M. T. An easy-to-assemble, robust, and lightweight drive implant for chronic tetrode recordings in freely moving animals. J Neural Eng. 17 (2), 026044 (2020).
- Sheng, T., et al. A novel 3D-printed multi-driven system for large-scale neurophysiological recordings in multiple brain regions. J Neurosci Methods. 361, 109286 (2021).
- Vöröslakos, M., Petersen, P. C., Vöröslakos, B., Buzsáki, G. Metal microdrive and head cap system for silicon probe recovery in freely moving rodent. eLife. 10, e65859 (2021).
- Mishra, A., Marzban, N., Cohen, M. X., Englitz, B. Dynamics of neural microstates in the VTA-striatal-prefrontal loop during novelty exploration in the rat. bioRxiv. , (2020).
- Allen, L. M., et al. RatHat: A self-targeting printable brain implant system. eNeuro. 7 (2), (2020).
- . Soldering Safety Available from: https://safety.eng.cam.ac.uk/safe-working/copy_of_soldering-safety (2018)
- . Harvard Soldering Safety Guidelines Available from: https://www.ehs.harvard.edu/sites/default/files/soldering_safety_guidelines.pdf (2019)
- Samanta, A., et al. CBD lengthens sleep but shortens ripples and leads to intact simple but worse cumulative memory. iScience. 26 (11), 108327 (2023).
- Machado, F., Malpica, N., Borromeo, S. Parametric CAD modeling for open source scientific hardware: Comparing OpenSCAD and FreeCAD Python scripts. PLOS One. 14 (12), e0225795 (2019).
- Schwarz, C., et al. The head-fixed behaving rat: Procedures and pitfalls. Somatosens Mot Res. 27 (4), 131-148 (2010).
- Gardiner, T. W., Toth, L. A. Stereotactic surgery and long-term maintenance of cranial implants in research animals. Contemp Top Lab Anim Sci. 38 (1), 56-63 (1999).
- França, A. S. C., van Hulten, J. A., Cohen, M. X. Low-cost and versatile electrodes for extracellular chronic recordings in rodents. Heliyon. 6 (9), e04867 (2020).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。