
É necessária uma assinatura da JoVE para visualizar este conteúdo. Faça login ou comece sua avaliação gratuita.
Method Article
O TD Drive: um implante paramétrico de código aberto para registros eletrofisiológicos de várias áreas em ratos que se comportam e dormem
Neste Artigo
Resumo
Aqui, apresentamos um implante exclusivo e imprimível em 3D para ratos, denominado TD Drive, capaz de gravações bilaterais simétricas de eletrodos de fio, atualmente em até dez áreas cerebrais distribuídas simultaneamente.
Resumo
Interações intrincadas entre várias áreas do cérebro estão subjacentes à maioria das funções atribuídas ao cérebro. O processo de aprendizagem, bem como a formação e consolidação de memórias, são dois exemplos que dependem fortemente da conectividade funcional em todo o cérebro. Além disso, a investigação de semelhanças e/ou diferenças hemisféricas anda de mãos dadas com essas interações multiáreas. Os estudos eletrofisiológicos que tentam elucidar ainda mais esses processos complexos dependem, portanto, do registro da atividade cerebral em vários locais simultaneamente e muitas vezes de forma bilateral. Apresentamos aqui um implante imprimível em 3D para ratos, denominado TD Drive, capaz de gravações simétricas e bilaterais de eletrodos de fio, atualmente em até dez áreas cerebrais distribuídas simultaneamente. O design de código aberto foi criado empregando princípios de design paramétrico, permitindo que os usuários em potencial adaptem facilmente o design do inversor às suas necessidades, simplesmente ajustando parâmetros de alto nível, como coordenadas ântero-posterior e mediolateral dos locais dos eletrodos de registro. O desenho do implante foi validado em n = 20 ratos Lister Hooded que realizaram diferentes tarefas. O implante era compatível com gravações de sono amarradas e gravações de campo aberto (Object Exploration), bem como gravação sem fio em um grande labirinto usando dois sistemas de gravação comercial diferentes e headstages. Assim, apresenta-se aqui o projeto adaptável e a montagem de um novo implante eletrofisiológico, facilitando a rápida preparação e implantação.
Introdução
A natureza multi-área das interações cerebrais durante a vigília e o sono dificulta o estudo exaustivo dos processos fisiológicos em andamento. Embora abordagens como ressonância magnética funcional (fMRI) e ultrassom funcional (fUS) permitam a amostragem da atividade cerebral de cérebros inteiros 1,2, elas exploram o acoplamento neurovascular para inferir a atividade cerebral da atividade hemodinâmica, limitando sua resolução temporal2. Além disso, a fMRI requer a colocação do sujeito da pesquisa em um scanner de ressonância magnética, proibindo experimentos com animais em movimento livre. A imagem óptica da dinâmica do cálcio com imagens únicas ou multifotônicas permite registros específicos do tipo de célula de centenas de neurônios simultaneamente3. No entanto, microscópios montados na cabeça, como o Miniscope3, que permitem o comportamento de movimento livre, geralmente são limitados a imagens de áreas corticais superficiais em cérebros intactos4. Embora o diâmetro de seu campo de visão no córtex possa ser da ordem de 1 mm, os requisitos de espaço desses microscópios montados na cabeça podem dificultar o direcionamento de várias áreas, especialmente adjacentes. Portanto, para capturar com precisão a dinâmica cerebral multiárea na vigília e no sono, a eletrofisiologia extracelular, registrada com eletrodos implantados nas áreas cerebrais de interesse, é um dos métodos de escolha devido à sua alta resolução temporal e precisão espacial5. Além disso, permite a caracterização da dinâmica do sono em animais compatível com análises obtidas a partir de EEG humano, aumentando o valor translacional dessemétodo6.
Classicamente, estudos que registram a atividade cerebral com eletrodos extracelulares empregaram eletrodos de fios individuais ou feixes de eletrodos, como tetrodos7. Sondas de última geração, como a sonda Neuropixels8 , permitem atingir várias áreas simultaneamente, uma vez que estão alinhadas em um eixo que permite implantar a sonda ao longo desse eixo sem prejudicar o animal. No entanto, gravações simultâneas precisas de várias áreas espacialmente separadas ainda permanecem desafiadoras, com os métodos existentes sendo caros ou demorados.
Nos últimos anos, os métodos de manufatura aditiva, como a estereolitografia, tornaram-se amplamente disponíveis. Isso permitiu que os pesquisadores desenvolvessem novos implantes de eletrodos adaptáveis às suas necessidades experimentais9, por exemplo, direcionamento repetível simplificado de várias áreas do cérebro. Freqüentemente, esses projetos de implantes também são compartilhados com a comunidade acadêmica como hardware de código aberto, permitindo que outros pesquisadores os adaptem aos seus próprios propósitos. O grau de adaptabilidade de implantes específicos varia tanto como resultado de como o implante é projetado quanto como ele é compartilhado. A modelagem paramétrica10 é uma abordagem popular no projeto auxiliado por computador, na qual diferentes componentes do projeto são vinculados por parâmetros interdependentes e um histórico de projeto definido. A implementação de uma abordagem paramétrica para projetar implantes aumenta sua reutilização e adaptabilidade10, pois a alteração de parâmetros individuais atualiza automaticamente os designs completos sem a necessidade de remodelação complexa do design. Uma necessidade consequente é que o design em si seja compartilhado em um formato editável que preserve as relações paramétricas e o histórico do design. Os formatos de arquivo que representam apenas primitivas geométricas, como STL ou STEP, inviabilizam as modificações paramétricas subsequentes dos modelos publicados.
Embora os hiperpropulsores tetrodos 11,12,13 permitam gravações de dezenas de tetrodos, sua montagem e implantação são demoradas e sua qualidade depende em grande parte da habilidade e experiência do pesquisador individual. Além disso, eles geralmente combinam os tubos-guia que direcionam os eletrodos de gravação para o local de destino em um ou dois feixes maiores, limitando assim o número e a propagação das áreas que podem ser direcionadas com eficiência.
Outros implantes 14,15 expõem o crânio completo e permitem a colocação livre de vários microdrives individuais que carregam os eletrodos de gravação. Embora a colocação de microdrives independentes16 durante o tempo de cirurgia maximize a flexibilidade, aumenta o tempo de cirurgia e pode dificultar o direcionamento de várias áreas adjacentes devido aos requisitos de espaço dos microdrives individuais. Além disso, embora os implantes sejam de código aberto, eles são publicados apenas como arquivos STL, dificultando a modificação.
Um exemplo de unidade com uma filosofia paramétrica mais inerente é o RatHat17. Ao fornecer um estêncil cirúrgico que cobre toda a superfície dorsal do crânio, ele permite o direcionamento preciso de vários alvos cerebrais sem o uso de uma estrutura estereotáxica durante a cirurgia. Múltiplas variações de implantes para cânulas, optrodes ou tetrodes estão disponíveis. No entanto, embora a unidade seja gratuita para fins acadêmicos, ela não é publicada em código aberto, criando um obstáculo para os pesquisadores avaliarem e usarem o implante.
Apresentado neste artigo é o TD Drive (veja a Figura 1), um novo implante imprimível em 3D para gravações de eletrodos extracelulares em ratos. O TD Drive visa superar algumas das desvantagens das soluções existentes: permite atingir várias áreas do cérebro, espelhadas em ambos os hemisférios, com eletrodos de fio independentes simultaneamente. Devido ao seu design simples, pode ser montado em poucas horas a um custo relativamente baixo por pesquisadores menos experientes. O TD Drive é publicado em código aberto, em formatos de arquivo facilmente modificáveis para permitir que os pesquisadores o ajustem às suas necessidades específicas. A incorporação de uma abordagem de modelagem 3D paramétrica desde o início do processo de design do TD Drive permite que os parâmetros necessários a serem alterados sejam abstraídos: para alterar os locais de destino, os pesquisadores podem simplesmente editar os parâmetros que representam suas coordenadas dorsoventral e anteroposterior, sem a necessidade de redesenhar o acionamento por conta própria. Os arquivos para modificar e fabricar o TD Drive podem ser encontrados em https://github.com/3Dneuro/TD_Drive.

Figura 1: Visão geral da unidade TD. (A) Renderização de uma unidade TD com uma tampa protetora. (B) Renderização com partes internas mostradas. O TD Drive apresenta (a) vários locais de gravação parametricamente ajustáveis para fios de eletrodo fixos e móveis, um EIB com (b) um conector Omnetics de alta densidade compatível com sistemas comuns de aquisição de dados conectados e sem fio e (c) um mapeamento de canal intuitivo otimizado para gravações com sistemas Intan/Open Ephys (consulte a Figura Suplementar 1) e (d) uma tampa para proteger o implante durante gravações amarradas e quando nenhum headstage está conectado. (C) Um estêncil guia na parte inferior do TD Drive facilita a colocação de cânulas guia e serve como uma verificação redundante dos locais dos implantes durante a cirurgia. Clique aqui para ver uma versão maior desta figura.
{kind=link}
O desenho do implante foi testado em n = 4, validado em n = 8 e confirmado em n = 8 ratos Lister Hooded que realizaram diferentes tarefas. Os primeiros 4 animais foram usados para desenvolver o impulso e ajustar os parâmetros. Em seguida, um piloto completo foi executado com 8 animais (mostrado nos resultados). Uma segunda coorte de 8 animais foi executada e incluída na análise de sobrevivência do implante. O implante era compatível com gravações de sono amarradas e gravações de campo aberto (Object Exploration), bem como gravação sem fio em um grande labirinto (HexMaze 9 m x 5 m) usando dois sistemas de gravação comercial diferentes e headstages. As duas coortes de 8 foram gravadas com dois sistemas de aquisição diferentes - amarrados para gravações de sono mais longas e sem fio para gravações de exploração de grandes labirintos. Podemos concluir que esse simples acionamento de fio permite experimentos de longa duração com coortes maiores por pesquisadores menos experientes para permitir a análise do estágio do sono, bem como a análise de oscilação em várias áreas do cérebro. Isso contrasta com a maioria dos implantes de eletrofisiologia até o momento, que, devido à dificuldade e intensidade de tempo, permitem coortes menores de animais e geralmente precisam de experimentadores muito experientes. No entanto, com esse impulso, nenhuma atividade individual de neurônios pode ser registrada; assim, o uso é limitado a investigações de potencial de campo local (LFP) e atividade de soma.
Protocolo
O presente estudo foi aprovado pela Comissão Central Holandesa Dierproeven (CCD) e conduzido de acordo com a Lei de Experimentos em Animais (códigos de protocolo: 2020-0020-006 e 2020-0020-010). Foram utilizados ratos machos Lister Hooded de 9 a 12 semanas na chegada. Os reagentes e os equipamentos utilizados no protocolo estão listados na Tabela de Materiais. Consulte a Figura Suplementar 1 e a Figura Suplementar 2 para obter as etapas do processo de construção da unidade.
1. Ajuste e criação de modelos 3D e dados da placa de interface do eletrodo (EIB)
- Abra o projeto do corpo da unidade no Autodesk Fusion. Clique em Alterar parâmetros na guia Modificar . Ajuste as coordenadas para o primeiro local de gravação inserindo a coordenada ântero-posterior em ânteroPosteriorSite1 e a coordenada mediolateral em medioLateralSite1. Pode-se ajustar o diâmetro do orifício para o tubo guia ou eletrodos ajustando o diâmetroSite1. Repita para os locais de gravação 2 e 3 e o design do modelo será ajustado automaticamente.
NOTA: Os três locais usados para o protocolo atual são hipocampo (HPC), contendo feixes de fios móveis, e córtex pré-frontal (PFC) e retroesplenial (RSC), ambos com feixes de fios fixos (o feixe de fios PFC tem como alvo o córtex pré-límbico (PRL) e cingulado anterior (ACC)). A Tabela 1 fornece os limites impostos manualmente aos parâmetros que controlam as coordenadas mediolaterais dos locais de registro. - Exporte o corpo da unidade atualizado clicando com o botão direito do mouse no navegador e selecionando Salvar como malha. Selecione o tipo STL (binário), unidades mm e refinamento alto.
- Selecione os arquivos STL preparados para a tampa regular ou, se necessário (por exemplo, quando os alvos são muito laterais), os arquivos STL preparados para as maiúsculas grandes.
- Dependendo da tampa escolhida, selecione o EIB regular ou grande para produção. Os arquivos de produção Gerber para ambos os EIBs são fornecidos como arquivos zip que podem ser enviados diretamente para um serviço de fabricação.
2. Impressão dos modelos 3D e fabricação do EIB
NOTA: Para o presente estudo, uma impressora 3D disponível comercialmente foi usada para produzir as peças (ver Tabela de Materiais). Ao usar impressoras diferentes ou terceirizar a produção, resinas diferentes e comparáveis para produzir as peças podem precisar ser usadas.
- Imprima o corpo da unidade e os lançadores usando estereolitografia9 com alta resolução em uma resina regular ou biocompatível (por exemplo, resina transparente, preta ou branca) com altura de camada de 25 μm. Imprima as peças da tampa com uma resina forte e resistente (por exemplo, Tough 2000).
- Fabricar o BEI internamente ou mandá-lo ser produzido por um prestador de serviços externo. Solde o conector de alta densidade ao EIB usando técnicas de solda SMD (Surface Mounted Device).
NOTA: Quando não tiver experiência na soldagem de componentes eletrônicos finos, recomenda-se que a soldagem seja feita externamente, por ex.ample, na oficina de eletrônica da universidade ou em um fornecedor comercial. Reforce o conector de alta densidade soldado aplicando um epóxi forte ao redor do conector. Tenha cuidado para não cobrir os orifícios dos eletrodos com epóxi.
3. Pós-processamento do corpo impresso em 3D
NOTA: A tampa e os lançadores não devem precisar de pós-processamento. Dependendo da qualidade das impressões 3D, elas podem precisar ser levemente lixadas ou remover os vestígios de suporte restantes. Ao lixar e perfurar, tome cuidado para não quebrar as paredes do corpo da unidade. Se necessário, limpe as peças pós-processadas com isopropanol e um pano macio e/ou ar comprimido.
- Faça os furos para os tubos-guia na parte superior e inferior do corpo da unidade com uma broca de 0,5 mm montada em um torno de pino. Isso garante que as dimensões estejam corretas e consistentes em todos os locais.
- Faça os dois furos escareados (como na Figura 2E) no corpo da unidade para a inserção de latão da lançadeira usando uma broca de 2 mm em uma morsa de pino.
- Limpe os orifícios escareados dos detritos de perfuração com ar comprimido. Em seguida, bata nos orifícios guia para os parafusos shuttle, que são a extensão dos orifícios escareados, com uma torneira M1. Execute o rosqueamento em duas ou mais iterações, limpando os detritos da torneira e o furo entre as iterações. Opcionalmente, lubrifique a torneira com uma gota de óleo mineral.
- Limpe o corpo da unidade de detritos de perfuração e batimento com ar comprimido.

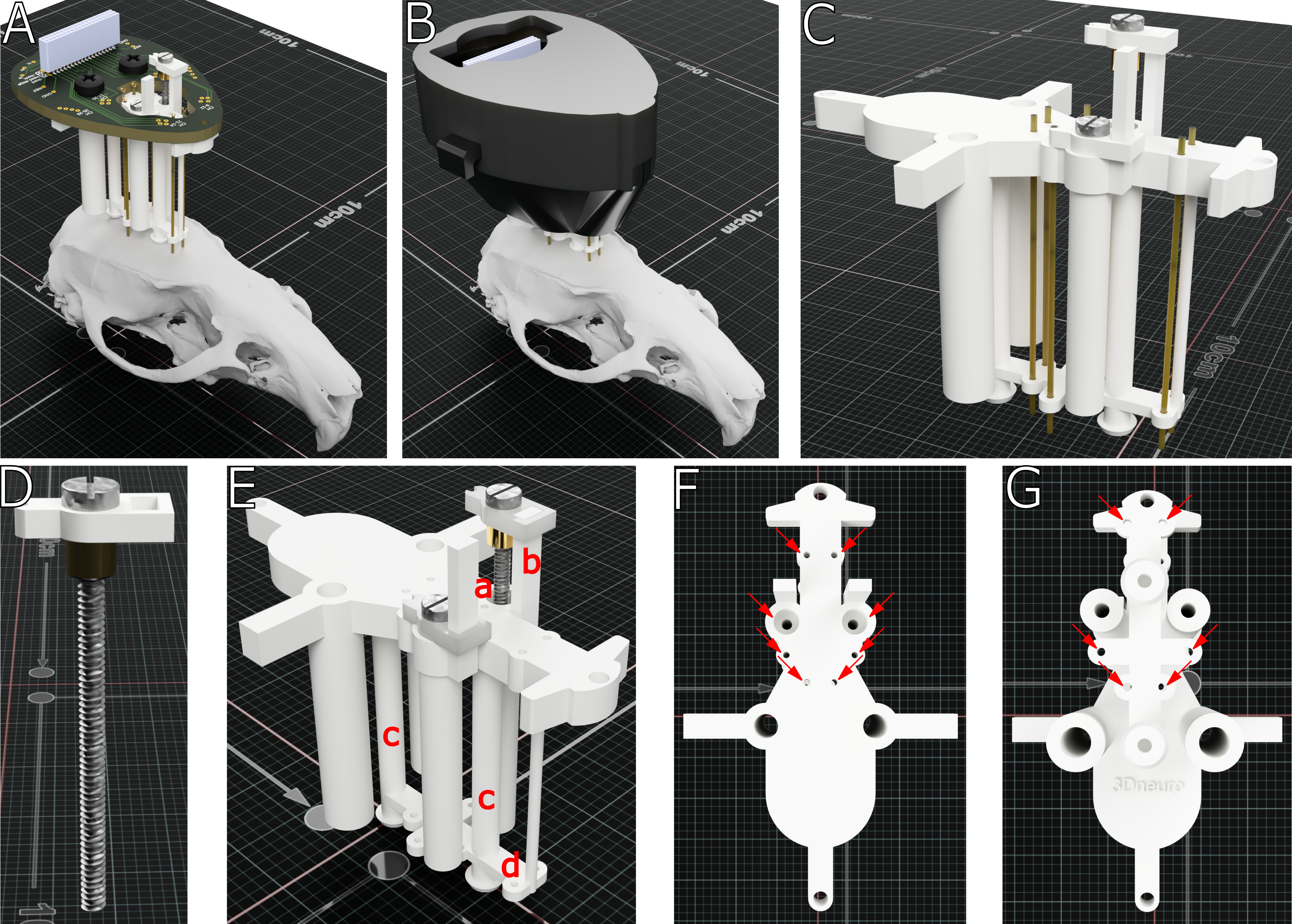
Figura 2: Renderização do TD Drive. (A,B) TD Drive (A) sem e (B) com uma tampa protetora em um modelo de crânio de rato. (C) Tubos-guia de poliimida inseridos corretamente em cada um dos seis locais de registro. (D) Um conjunto de lançadeira isolado e completo com o parafuso guia, lançadeira impressa em 3D e a inserção de latão soldado. (E) Carroceria TD Drive com duas lançadeiras inseridas. Marcado em vermelho: (a) orifícios escareados para o transporte, (b) guia do transporte, (c) pedestais centrais do corpo da unidade, (d) estêncil guia. (F, G) Locais importantes na parte superior (F) e inferior (G) do corpo da unidade que podem exigir pós-processamento após a impressão 3D são indicados por uma seta vermelha cada. Clique aqui para ver uma versão maior desta figura.
{kind=link}
4. Conjuntos de lançadeiras
- Deslize um shuttle impresso em 3D em um parafuso M1x16. Use uma inserção de latão M1 para manter a lançadeira impressa em 3D no lugar. A lançadeira precisa ser capaz de girar livremente sem se mover para cima ou para baixo depois que a pastilha é colocada.
CUIDADO: As etapas a seguir contêm riscos de queimadura (soldagem). Dependendo da solda e do fluxo de solda usados, eles podem incluir exposição a irritantes respiratórios e chumbo. Sempre use proteção para os olhos ao soldar (pois a solda pode respingar) e siga as diretrizes apropriadas para o manuseio seguro de substâncias potencialmente nocivas, incluindo ventilação adequada do espaço de trabalho para extrair os vapores da solda. Siga os regulamentos e procedimentos operacionais locais ou consulte o material disponível online18,19. - Usando uma pequena quantidade de pasta de solda, solde a inserção de latão ao parafuso. Tome cuidado para não superaquecer a pastilha e o parafuso para não derreter a lançadeira impressa em 3D. Dependendo da resina usada para imprimir em 3D a lançadeira, uma pequena quantidade de fusão (e, posteriormente, a lançadeira grudada na pastilha) é difícil de evitar.
NOTA: Ao usar parafusos de aço inoxidável, pode ser necessário fluxo de solda. Recomenda-se o uso de parafusos de latão ou aço de máquina, pois são mais fáceis de soldar. - Depois que o conjunto da lançadeira for resfriado, gire suavemente a lançadeira impressa em 3D várias vezes ao redor do parafuso. Se a lançadeira se fundiu à inserção durante a soldagem, isso deve liberá-la.
NOTA: Certifique-se de que o ônibus possa girar livremente e que não oscile. Em caso afirmativo, descarte o conjunto do ônibus e inicie um novo. Tente girar cuidadosamente a inserção de latão. Se girar em relação ao parafuso, repita o processo de soldagem.
5. Montagem da unidade
- Corte os tubos de poliimida disponíveis comercialmente em aproximadamente 25 mm de comprimento, mas pelo menos longos o suficiente para se estender por todo o corpo da unidade.
- Insira os tubos-guia de poliimida no corpo da unidade. Cada tubo deve ser inserido através de um orifício na parte superior da unidade e o orifício correspondente no estêncil guia na parte inferior da unidade ("d" na Figura 2E). Os tubos devem ser inseridos até que estejam nivelados com a parte superior do corpo da unidade.
- Usando uma agulha fina ou palito de dente, aplique uma pequena quantidade de cola líquida de cianoacrilato nos orifícios na parte superior do corpo da unidade para fixar os tubos-guia no lugar. Aplique a cola na parte inferior do corpo para evitar que a cola escorra para os tubos-guia. A cola será puxada para o espaço entre o corpo de acionamento e o tubo guia por forças capilares e, assim, conectará os dois.
- Aplique uma pequena quantidade de cola de cianoacrilato na interface entre os tubos-guia e o estêncil-guia na parte inferior do corpo da unidade. Novamente, tome cuidado para não entupir os tubos-guia com cola. Deixe a cola secar por alguns minutos.
NOTA: A quantidade exata de tempo necessária depende do material do acionamento e da folga entre o corpo do inversor e os tubos-guia. Geralmente, 5-10 minutos devem ser suficientes. - Vire o corpo do inversor de cabeça para baixo e corte os tubos-guia de poliimida na parte inferior de modo que eles se estendam aproximadamente 1 mm além dos pedestais centrais do corpo do inversor ("c" na Figura 2E e Figura Suplementar 2). Nesta configuração, a extremidade dos tubos-guia ficará nivelada com a superfície do cérebro no momento da implantação.
NOTA: A unidade foi desenvolvida para atingir áreas mais profundas do cérebro. Se as áreas corticais superficiais forem direcionadas, podem ser necessários tubos-guia de poliimida mais curtos para não ferir a superfície do cérebro em caso de inchaço cerebral inicial. - Insira dois conjuntos de lançadeira no corpo da unidade. Ao aparafusá-los nos orifícios das guias roscadas, certifique-se de que os parafusos estejam paralelos às guias do vaivém ("b" na Figura 2E). Use os dedos para alinhar suavemente os shuttles com as guias do shuttle.
- Aparafuse totalmente as lançadeiras nos orifícios escareadores para verificar se as inserções de latão do conjunto da lançadeira não ficam presas no corpo da unidade ou colidem com os tubos-guia de poliimida. Para este protocolo, é necessária uma distância mínima de 16 voltas completas. Se isso não for alcançado, corte ainda mais o tubo de poliimida na parte superior do corpo da unidade para criar mais espaço. Não aperte demais o carro no corpo do inversor - isso pode destruir as roscas presas no corpo do inversor e a conexão de solda do conjunto do inversor.
NOTA: Se um conjunto de lançadeira ficar preso, remova-o completamente e verifique se a conexão de solda se soltou. Nesse caso, use um novo conjunto de lançadeira. Se o conjunto do vaivém colidir com um tubo guia, encurte o tubo guia para que ele não se estenda além do corpo de acionamento. - Aparafuse o EIB ao corpo da unidade com parafusos de poliimida M2.5x5. Aplique algumas gotas de cola de cianoacrilato entre o corpo da unidade e o EIB. Certifique-se de não entupir os orifícios de passagem para a conexão do eletrodo.
6. Preparando a capa protetora
- Insira uma porca M2 de aço inoxidável na extrusão na metade esquerda da tampa e fixe-a com cola de cianoacrilato.
- Se necessário, faça o furo na frente da tampa esquerda com uma broca M1 em um torno de pino. Bata no orifício na frente da metade da tampa direita com uma torneira M1.
7. Preparando os eletrodos de fio
- Prepare duas placas de metal como superfície para criar os feixes de fios do eletrodo. As placas servem como uma superfície plana, estável, mas móvel, na qual ocorrerá a montagem, colagem e corte do feixe de arame. Prenda papel de plotagem na primeira placa e dê um nó em duas fitas adesivas na segunda placa, com a superfície pegajosa apontando para cima.
- Três dos quatro fios nos feixes de HPC serão cortados em um ângulo de 60 graus para criar um deslocamento na direção dorsoventral. Isso permitirá a colocação de um fio acima, dentro e abaixo da camada piramidal do hipocampo, respectivamente. Para facilitar o corte, desenhe uma linha clara com um ângulo de 60 graus no papel de plotagem (linha de 60 graus).
- Para cada feixe de eletrodos HPC, corte 4 pedaços de fio de eletrodo com um comprimento de 4,5 cm cada. Para cada feixe de eletrodos PFC e RSC, corte 4 pedaços de fio de eletrodo com um comprimento de 3,5 cm cada.
- Pegue suavemente 4 fios tocando-os com a ponta do dedo (eles grudam) e coloque-os o mais próximo possível um do outro na fita adesiva. Certifique-se de não colocá-los uns sobre os outros.
- Sob um microscópio, use uma pinça para colocar os fios juntos o mais próximo possível. Aplique uma fina camada de cola líquida de cianoacrilato nos primeiros 2 cm da parte superior do feixe. Para o feixe HPC, cole > 2 cm e < 3,5 cm do fio. Espere a cola secar.
- Toque os fios suavemente com uma pinça sob um microscópio. Se não se separarem, são colados corretamente. Como uma verificação de sanidade, certifique-se de que a camada de cola brilhe sob a iluminação do microscópio.
- Depois de totalmente seco, remova o feixe de fios da fita e transfira-o para o prato com o papel de plotagem. Sob um microscópio, verifique se há excesso de cola no feixe de fios na parte superior ou nas laterais e remova-o cuidadosamente com uma lâmina de bisturi.
- Para os feixes RSC, faça um corte reto na parte inferior da matriz, perpendicular à direção dos fios.
- Para os feixes HPC, coloque a matriz no papel de plotagem de modo que ela cruze a linha de 60 graus e use a linha como guia para fazer um corte em ângulo de 60 graus na direção dos fios.
- Em seguida, use uma lâmina de bisturi para separar cuidadosamente o mais curto dos 4 fios do feixe. Corte o fio perpendicularmente à direção do fio, encurtando-o para aproximadamente 0,75 mm em comparação com o segundo fio mais longo do feixe.
- Para os feixes PFC, divida a parte inferior da matriz em dois feixes de 2 fios. Certifique-se de que os dois fios estejam bem colados. Encurte um dos feixes de 2 fios em 1 mm, cortando-o perpendicularmente à direção do fio. Consulte a Figura Suplementar 1 (inferior) e a Figura Suplementar 2b para obter imagens dos feixes de fios cortados.
8. Preparando o fio terra e os fios de EEG
- Empurre pelo menos 10 pinos SIP/DIP para fora de uma régua de soquete SIP/DIP interconectada com passo de 1.27 mm.
- Corte 2 pedaços de 6 cm de comprimento para o fio terra (GND). Corte 8 pedaços de 6 cm de comprimento para o fio EEG. Use uma lâmina de bisturi para remover cuidadosamente parte do isolamento de ambas as extremidades de todos os fios.
- Coloque um parafuso de aço inoxidável M1x3 em uma terceira mão, deixando o máximo de espaço possível acessível abaixo da cabeça do parafuso. Enrole um lado desisolado de um fio GND ou EEG ao redor da haste do parafuso, logo abaixo da cabeça do parafuso.
- Aplique uma pequena quantidade de fluxo de solda com uma pequena agulha ou palito de dente. Solde o fio ao parafuso. Certifique-se de não entupir acidentalmente a ranhura da cabeça do parafuso.
- Coloque um pino SIP/DIP na terceira mão para que o lado fêmea fique acessível. Insira a parte desisolada do lado oposto do fio no pino SIP/DIP. Aplique uma pequena quantidade de fluxo de solda e solde o fio ao pino.
- Remova o conjunto parafuso-fio soldado do suporte. Este conjunto será implantado no crânio durante a cirurgia de implantação.
- Coloque outro pino SIP/DIP no suporte, girado 180 graus (ou seja, lado macho acessível). Aplique uma pequena quantidade de fluxo de solda e solde um lado desisolado do outro fio no lado macho do pino.
- Remova o conjunto de pinos de arame soldado do suporte. Este conjunto será posteriormente conectado ao EIB, e o conjunto parafuso-fio, bem como o conjunto fio-pino, serão conectados um ao outro durante a cirurgia de implantação usando seus dois pinos.
- Para reforçar as conexões soldadas, aplique uma pequena quantidade de cola de cianoacrilato na conexão entre fios e pinos.
- Depois que a cola secar, verifique se os pinos SIP/DIP dos dois conjuntos podem ser conectados suavemente. Use a opção de verificação de continuidade de um multímetro para verificar se há uma conexão contínua entre o parafuso e a extremidade do fio desisolado do conjunto de pinos de fio quando ambos os conjuntos estiverem conectados. Opcionalmente, codifique por cores cada conjunto de fios com esmalte (consulte a Tabela de Materiais) para simplificar a conexão correta durante a cirurgia de implante.
9. Carregando os feixes de fios na unidade
- Conecte a unidade a um suporte. Tenha cuidado para não aplicar muita pressão ao EIB ou danificar o conector de alta densidade nesta etapa.
- Quando o corpo da unidade estiver em uma posição estável, pegue um dos feixes de fios e deslize-o cuidadosamente no respectivo tubo de poliimida, manualmente ou usando uma pinça fina. Certifique-se de que a matriz de fios esteja colocada na orientação correta (por exemplo, para a matriz PFC, os dois fios mais longos da matriz devem estar voltados para a medial) e tome cuidado para não dobrar a matriz de fios.
- Repita a última etapa para todos os outros feixes de fios.
- Use uma pinça fina para agarrar um dos fios e dobre-o cuidadosamente em direção ao orifício em que se deseja inseri-lo. Uma vez inserido, use um alfinete dourado para prendê-lo no orifício EIB. Repita isso para todos os fios do feixe e para todos os feixes.
- Certifique-se de que, durante esta fase, os fios façam um bom laço acima do EIB (desta forma, ainda há espaço para mover o feixe para cima e para baixo no tubo de poliimida para ajustar o comprimento na parte inferior do tubo) e que a matriz que está saindo da parte inferior do tubo de poliimida não se torne acidentalmente dobrada. Certifique-se de anotar qual fio de cada feixe de fios se conecta a cada canal no EIB. Consulte a Figura Suplementar 1 para obter uma elaboração sobre o mapeamento de canais do TD Drive.
NOTA: Alternativamente, depois de carregar cada feixe de fios (etapa 9.2), pode-se conectar diretamente os fios ao EIB (etapa 9.4) e, em seguida, prosseguir com a etapa 9.2 + 9.4 para os feixes de fios restantes. Isso pode variar com base nas preferências pessoais dos experimentadores. Consulte a Figura Suplementar 2b para obter um exemplo de uma unidade TD carregada.
- Certifique-se de que, durante esta fase, os fios façam um bom laço acima do EIB (desta forma, ainda há espaço para mover o feixe para cima e para baixo no tubo de poliimida para ajustar o comprimento na parte inferior do tubo) e que a matriz que está saindo da parte inferior do tubo de poliimida não se torne acidentalmente dobrada. Certifique-se de anotar qual fio de cada feixe de fios se conecta a cada canal no EIB. Consulte a Figura Suplementar 1 para obter uma elaboração sobre o mapeamento de canais do TD Drive.
- Ajuste o comprimento dos feixes de fios para direcionar corretamente os locais de gravação empurrando ou puxando suavemente os feixes de fios para dentro ou para fora do tubo guia (consulte a Figura 2d suplementar).
NOTA: Como os tubos-guia são cortados para ficarem nivelados com a superfície do cérebro, a distância à qual um feixe de fios se estende além do tubo-guia corresponde à localização dorsoventral da área-alvo. Os feixes de fios HPC móveis devem estar nivelados com a parte inferior do tubo-guia, os feixes RSC fixos devem se estender 1.5 mm e os feixes PFC fixos devem se estender 3.5 mm além dos tubos-guia. Ao empurrar ou puxar os conjuntos de fios, tome cuidado para não puxar fios individuais para fora do EIB na parte superior ou dobrar a parte inferior do feixe de fios. - Quando as matrizes de fios fixos (RSC e PFC) estiverem alinhadas, aplique uma pequena quantidade de cola epóxi forte na parte superior dos tubos-guia, colando os feixes no lugar. Enquanto o epóxi está curando, certifique-se de que os feixes de fios ainda estejam alinhados corretamente na parte inferior.
- Para fixar as matrizes de fios HPC móveis, primeiro mova o ônibus espacial para a posição mais alta necessária (nos experimentos descritos neste artigo, pelo menos 16 voltas completas/4 mm acima da posição mais baixa). Em seguida, empurre os feixes de fios na abertura em forma de U da lançadeira e cole-os no lugar com uma pequena quantidade de cola epóxi forte.
NOTA: Certifique-se de que o epóxi não escorra pelo feixe para o tubo de poliimida. Quando o epóxi estiver curado, aplique uma segunda camada de epóxi no mesmo local para reforçar a conexão e diminuir a probabilidade de a conexão quebrar quando a lançadeira for movida. - Insira cuidadosamente a extremidade aberta do conjunto do pino de fio de um fio GND através de um dos orifícios de passagem marcados com GND. Fixe-o usando um pino dourado.
NOTA: Ao usar um headstage no qual os canais GND e de referência (REF) estão em curto, um canal REF também pode ser usado se for mais conveniente. - Remova a unidade do suporte; Tome cuidado para não dobrar nenhum dos conjuntos de fios. Reconecte a parte frontal da unidade no mesmo suporte e insira 4 conjuntos de pinos de fio EEG nos orifícios de passagem para os canais de EEG (marcados com 2,4, 29, 31) e fixe-os com um pino dourado cada.
- Para todos os fios GND e EEG, use um multímetro na configuração de continuidade para verificar a conexão contínua entre o pino dourado no EIB e o pino do conjunto fio-pino conectado.
- Armazene a unidade. Isso pode ser feito, por exemplo, prendendo a tampa ao corpo da unidade e armazenando-a de cabeça para baixo.
NOTA: Antes do implante cirúrgico, esterilize a parte inferior da unidade usando etanol. Todos os parafusos ósseos e conjuntos de fios GND/EEG devem ser esterilizados em etanol. Os instrumentos cirúrgicos devem ser esterilizados em autoclave.
10. Cirurgia de implante de unidade
NOTA: Esta etapa descreve brevemente os procedimentos cirúrgicos para implantar o TD Drive. Um protocolo de implantação mais extenso, incluindo uma descrição das ferramentas, bem como doses e concentrações de medicamentos, pode ser encontrado no Arquivo Suplementar 1.
- Esterilize as ferramentas cirúrgicas e limpe e higienize a área cirúrgica seguindo as diretrizes institucionais locais. Para esterilizar os implantes, coloque as partes dos fios dos eletrodos que ficarão em contato com o cérebro em etanol por pelo menos um minuto.
NOTA: A exposição prolongada ao etanol ou seus vapores pode enfraquecer a cola de cianoacrilato. Se os vapores não estiverem presos, prolongue o tempo de imersão dos fios em etanol. Para verificar a integridade da cola, é recomendável encontrar o momento ideal com um implante de teste que não seja usado em um experimento real. - Fornecer analgesia preventiva necessária, antibióticos e anestesia gasosa (isoflurano) de acordo com as diretrizes institucionais e locais.
- Coloque o rato no aparelho estereotáxico. Raspe o topo da cabeça e desinfete a pele com iodopovidona. Aplique anestésico local por via subcutânea (lidocaína) e faça uma pequena incisão no crânio no topo da linha média.
- Exponha o crânio puxando a pele para o lado. Remova o tecido conjuntivo do topo do crânio, seque e limpe a superfície do crânio. Separe suavemente os músculos na lateral do crânio para permitir a colocação dos parafusos de ancoragem.
- Meça as coordenadas bregma e lambda. Para um direcionamento preciso, certifique-se de que a superfície do crânio esteja paralela ao plano ântero-posterior-mediolateral da estereotaxa, medindo a diferença na posição dorsoventral do bregma e lambda. Se as coordenadas forem diferentes, ajustar a posição do rato em estereotaxa, levantando ou abaixando o bocal.
- Marque as craniotomias ao redor dos locais alvo (córtex pré-límbico (AP +3,5 mm e ML + -1 mm), retroesplenial (AP+5,8 mm e ML +-1mm e hipocampo (AP -3,8 mm e ML + - 2,5 mm)).
- Faça furos para parafusos GND/EEG e parafusos de ancoragem. Insira os parafusos e cubra-os com acrílico dental líquido. Perfure as craniotomias e remova cuidadosamente a dura-máter. Evite que as craniotomias sequem aplicando solução salina estéril.
- Posicione cuidadosamente o TD Drive em cima das craniotomias, garantindo que os tubos-guia estejam nivelados com o crânio. Proteja os tubos-guia com vaselina e fixe o TD Drive ao crânio com acrílico dentário.
- Abaixe as matrizes de fios direcionadas ao HPC lentamente de sua localização inicial (~ 1,5 mm DV da superfície do cérebro) em direção à camada piramidal do hipocampo CA1. A camada piramidal foi atingida progressivamente nos dias subsequentes durante as verificações de sinal no período de recuperação dos ratos.
- Coloque a tampa protetora ao redor da unidade.
- Desligue a anestesia gasosa e remova o rato da estrutura estereotáxica. Coloque o rato em uma gaiola limpa dentro de uma câmara aquecida e forneça comida úmida e água para recuperação. Monitore o rato até que ele esteja ativo novamente, movendo-se na gaiola, comendo e bebendo.
- Traga o rato de volta para a sala de alojamento. Fornecer analgesia e cuidados pós-operatórios de acordo com as diretrizes institucionais. Por exemplo, veja o exemplo de protocolo de cirurgia no Arquivo Suplementar 1.
11. Recuperação do BEI
- No final do experimento, recupere a unidade e remova a tampa protetora.
- Remova os pinos dourados e conecte os fios do eletrodo com cuidado. Desaparafuse o EIB do corpo da unidade. Empurrando suavemente as pinças macias entre o EIB e o corpo da unidade ou levantando cuidadosamente o EIB com a mão, libere a ligação de cianoacrilato restante que prende o EIB ao corpo.
- Limpe o EIB e os pinos de ouro para reutilização em implantes TD Drive subsequentes. Antes de reutilizar um EIB, verifique se há desgaste nas vias dos pinos dourados e no conector de alta densidade. Reutilize o EIB apenas se as vias estiverem intactas o suficiente para permitir uma boa conexão entre pinos dourados, fios de eletrodo e EIB e se a conexão do conector de alta densidade ao headstage ainda estiver suficientemente estável.
Resultados
Usando as instruções fornecidas no protocolo, o TD Drive pode ser construído facilmente por vários experimentadores. Após o desenvolvimento do drive (n = 4), um piloto completo foi executado com oito animais. Um lote adicional de oito animais foi implantado e a coleta de dados experimentais foi realizada. Como a análise de dados desses animais não foi concluída, eles foram incluídos na análise de sobrevivência, mas não em outras análises (por exemplo, direcionamento ou histo...
Discussão
Apresentado neste artigo é um implante adaptável para gravações bilaterais e simétricas de eletrodos de fio multi-área para ratos em movimento livre.
A capacidade de ajustar facilmente o implante alterando parâmetros pré-definidos foi uma das motivações para a criação do TD Drive. Embora visem maximizar a flexibilidade para a mudança de parâmetros, restrições inerentes às relações entre eles impõem necessariamente limites a essa adaptabilid...
Divulgações
TS e PvH são funcionários da 3Dneuro, Nijmegen, Holanda. A 3Dneuro co-desenvolveu e produz o TD Drive.
Agradecimentos
Os autores gostariam de agradecer a Angela Gomez Fonseca pela inspiração para desenvolver a unidade e a todos os alunos que realizaram experimentos piloto com os animais, Milan Bogers, Floor van Ravenswoud e Eva Severijnen. Este trabalho foi apoiado pelo Conselho Holandês de Pesquisa (NWO; Programa de Crossover 17619 "INTENSO").
Materiais
| Name | Company | Catalog Number | Comments |
| 0.5 mm drill bit | McMaster | 2951A38 | |
| 1.27 mm pitch interconnected SIP/DIP socket (Mill-Max) | Mouser Electronic | 575-003101 | For essembling and connection of EEG & GND screws |
| 5 minute epoxy | Bison | Commercially available | regular off-the-shelf epoxy |
| cyanoacrylate glue | Loctite | Super Glue-3 | |
| EEG wire | Science Products GmbH | 7SS-2T | |
| Electrode wire | Science Products GmbH | NC7620F | |
| Ethanol | LC | For standard pre-operative sterilization procedure of drive | |
| Fine forceps (5) | FST | 91150-20 | For wire bundle preperation and handling |
| Form 3B | Formlabs | 3D printer used to 3D print the self-printed parts of the TD drive | |
| Gold pins (small) | Neuralynx, Inc. | 9885 | Attachment of electorde wires to EIB board |
| Ground wire | Science Products GmbH | SS-3T/A | |
| High-density connector | LabMaker GmbH/Omnetics | A79026-001 | |
| Lister Hodded rats | Charles River Laboratories | Crl:LIS | we used male rats, 9-12 weeks of age at arrival |
| M1 brass insert | AliExpress | Commercially available | https://aliexpress.com/item/33047616164.html |
| M1 tap | McMaster | 2504A33 | |
| M1x16 screw | Bossard | 1096613 | |
| M1x3 stainless steel screws | Screws and More | 84213_14985 | |
| M2.5x5 polyimide screws | Screws and more | 7985PA25S_50 | |
| mineral oil | McMaster | 1244K14 | |
| Nail polish | Etos | Commercially available | For color coding EEG and GND wires |
| painter's tape | Gamma | Commercially available | For wire bundle preperation |
| Pin vise | McMaster | 8455A16 | |
| plotting paper | Canson | Commercially available | For wire bundle preperation |
| polyimide tubes | Amazon / Small Parts | TWPT-0159-30-50 | AWG, 0.0159" ID, 0.0219" OD, 0.0030" Wall, 30" Length |
| RHD 32-channel headstage with accelerometer | Intan Technologies, LLC | C3324 | For tethered recordings in the sleepbox |
| RHD 3-ft (0.9 m) standard SPI cables | Intan Technologies, LLC | C3203 | From commutator to headstage |
| RHD 6-ft (1.8 m) standard SPI cables | Intan Technologies, LLC | C3206 | From OpenEphys box to commutator |
| Slip Ring with Flange | Adafruit | 1196 | Commutator: 22 mm diameter, 12 wires |
| Solder flux | Griffon S-39 50 ml | Commercially available | For soldering EEG & GND screws |
| soldering paste | Amazon | B08CBZ5HC5 | |
| stainless steel M2 nut | McMaster | 93935A305 | |
| Tethered recording setup | OpenEphys | Acquasition Board | |
| Wireless recording logger | SpikeGadgets | miniLogger 32 | For wireless recordings in the task |
| Wireless recording setup | SpikeGadgets | Main Control Unit (MCU) incl. breakout board and RF transceiver | For wireless recordings in the task |
Referências
- Deffieux, T., Demené, C., Tanter, M. Functional Ultrasound Imaging: A New Imaging Modality for Neuroscience. Neuroscience. 474, 110-121 (2021).
- Finn, E. S., Poldrack, R. A., Shine, J. M. Functional neuroimaging as a catalyst for integrated neuroscience. Nature. 623 (7986), 263-273 (2023).
- Aharoni, D., Federico Guo, C. Aharoni-Lab/Miniscope-v4: Release for generating. GitHub. , (2023).
- Takasaki, K., Abbasi-Asl, R., Waters, J. Superficial bound of the depth limit of two-photon imaging in mouse brain. eNeuro. 7 (1), (2020).
- Buzsáki, G., et al. Tools for probing local circuits: High-density silicon probes combined with optogenetics. Neuron. 86 (1), 92-105 (2015).
- Lacroix, M. M., et al. Improved sleep scoring in mice reveals human-like stages. bioRxi.v. , (2018).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Sci New Ser. 261 (5124), 1055-1058 (1993).
- Jun, J. J., et al. Fully integrated silicon probes for high-density recording of neural activity. Nature. 551 (7679), 232-236 (2017).
- Headley, D. B., DeLucca, M. V., Haufler, D., Paré, D. Incorporating 3D-printing technology in the design of head-caps and electrode drives for recording neurons in multiple brain regions. J Neurophysiol. 113 (7), 2721-2732 (2015).
- Camba, J. D., Contero, M., Company, P. Parametric CAD modeling: An analysis of strategies for design reusability. Comput Aided Des. 74, 18-31 (2016).
- Kloosterman, F., et al. Micro-drive array for chronic in vivo recording: Drive fabrication. J Vis Exp. (26), e1094 (2009).
- Voigts, J., Siegle, J. H., Pritchett, D. L., Moore, C. I. The flexDrive: An ultra-light implant for optical control and highly parallel chronic recording of neuronal ensembles in freely moving mice. Front Syst Neurosci. 7, (2013).
- Voigts, J., Newman, J. P., Wilson, M. A., Harnett, M. T. An easy-to-assemble, robust, and lightweight drive implant for chronic tetrode recordings in freely moving animals. J Neural Eng. 17 (2), 026044 (2020).
- Sheng, T., et al. A novel 3D-printed multi-driven system for large-scale neurophysiological recordings in multiple brain regions. J Neurosci Methods. 361, 109286 (2021).
- Vöröslakos, M., Petersen, P. C., Vöröslakos, B., Buzsáki, G. Metal microdrive and head cap system for silicon probe recovery in freely moving rodent. eLife. 10, e65859 (2021).
- Mishra, A., Marzban, N., Cohen, M. X., Englitz, B. Dynamics of neural microstates in the VTA-striatal-prefrontal loop during novelty exploration in the rat. bioRxiv. , (2020).
- Allen, L. M., et al. RatHat: A self-targeting printable brain implant system. eNeuro. 7 (2), (2020).
- . Soldering Safety Available from: https://safety.eng.cam.ac.uk/safe-working/copy_of_soldering-safety (2018)
- . Harvard Soldering Safety Guidelines Available from: https://www.ehs.harvard.edu/sites/default/files/soldering_safety_guidelines.pdf (2019)
- Samanta, A., et al. CBD lengthens sleep but shortens ripples and leads to intact simple but worse cumulative memory. iScience. 26 (11), 108327 (2023).
- Machado, F., Malpica, N., Borromeo, S. Parametric CAD modeling for open source scientific hardware: Comparing OpenSCAD and FreeCAD Python scripts. PLOS One. 14 (12), e0225795 (2019).
- Schwarz, C., et al. The head-fixed behaving rat: Procedures and pitfalls. Somatosens Mot Res. 27 (4), 131-148 (2010).
- Gardiner, T. W., Toth, L. A. Stereotactic surgery and long-term maintenance of cranial implants in research animals. Contemp Top Lab Anim Sci. 38 (1), 56-63 (1999).
- França, A. S. C., van Hulten, J. A., Cohen, M. X. Low-cost and versatile electrodes for extracellular chronic recordings in rodents. Heliyon. 6 (9), e04867 (2020).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoExplore Mais Artigos
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados