
JoVE 비디오를 활용하시려면 도서관을 통한 기관 구독이 필요합니다. 전체 비디오를 보시려면 로그인하거나 무료 트라이얼을 시작하세요.
Method Article
TD Drive: 행동하는 쥐와 잠자는 쥐의 다중 영역 전기생리학적 기록을 위한 파라메트릭 오픈 소스 임플란트
요약
여기에서 우리는 현재 최대 10개의 분산된 뇌 영역에서 대칭적인 양측 와이어 전극 기록이 가능한 TD Drive라는 독특한 쥐용 3D 프린팅 가능한 임플란트를 소개합니다.
초록
여러 뇌 영역 간의 복잡한 상호 작용은 뇌에 기인하는 대부분의 기능의 기초가 됩니다. 학습 과정과 기억의 형성 및 통합은 뇌 전체의 기능적 연결성에 크게 의존하는 두 가지 예입니다. 또한 반구의 유사성 및/또는 차이점을 조사하는 것은 이러한 다중 영역 상호 작용과 밀접한 관련이 있습니다. 따라서 이러한 복잡한 과정을 더 자세히 설명하려는 전기생리학적 연구는 여러 위치에서 동시에 그리고 종종 양측 방식으로 뇌 활동을 기록하는 데 의존합니다. 여기에 소개된 것은 TD Drive라는 이름의 쥐용 3D 프린팅 가능한 임플란트로, 현재 최대 10개의 분산된 뇌 영역에서 대칭적인 양측 와이어 전극 기록이 가능합니다. 오픈 소스 설계는 파라메트릭 설계 원칙을 사용하여 만들어졌으므로 잠재 사용자는 기록 전극 위치의 전방 및 후방 좌표와 같은 높은 수준의 매개변수를 간단히 조정하여 드라이브 설계를 필요에 맞게 쉽게 조정할 수 있습니다. 임플란트 디자인은 서로 다른 작업을 수행한 n = 20마리의 리스터 후드 쥐에서 검증되었습니다. 이 임플란트는 테더링 수면 녹음 및 오픈 필드 녹음(Object Exploration)뿐만 아니라 두 개의 서로 다른 상업용 녹음 시스템과 헤드스테이지를 사용하여 큰 미로에서 무선 녹음과 호환되었습니다. 따라서 여기에 제시된 것은 새로운 전기생리학적 임플란트의 적응 가능한 설계 및 조립으로, 빠른 준비 및 이식을 용이하게 합니다.
서문
깨어 있을 때와 잠을 자는 동안 뇌 상호 작용의 다중 영역 특성으로 인해 진행 중인 생리적 과정을 철저히 연구하기가 어렵습니다. 기능적 MRI(functional MRI, fMRI) 및 기능적 초음파(functional ultrasound, fUS)와 같은 접근법은 뇌 전체의 뇌 활동을 샘플링할 수 있지만1,2 신경혈관 결합(neurovascular coupling)을 이용하여 혈류역학적 활동으로부터 뇌 활동을 추론하여 시간적 해상도를 제한한다2. 또한 fMRI는 연구 대상을 MRI 스캐너에 배치해야 하므로 자유롭게 움직이는 동물에 대한 실험을 금지합니다. 단일 또는 다광자 이미징을 사용한 칼슘 역학의 광학 이미징은 수백 개의 뉴런을 동시에 세포 유형별로 기록할 수 있습니다3. 그러나, 미니스코프(Miniscope)3와 같은 머리에 장착하는 현미경은 자유롭게 움직이는 행동을 허용하지만, 일반적으로 온전한 뇌4의 표재성 피질 영역을 이미징하는 것으로제한된다. 피질에서 시야의 직경은 약 1mm 정도일 수 있지만 이러한 머리 장착 현미경의 공간 요구 사항으로 인해 여러 영역, 특히 인접한 영역을 대상으로 하기 어려울 수 있습니다. 따라서, 각성 및 수면 시 다중 영역 뇌 역학을 정확하게 포착하기 위해, 뇌 관심 영역에 이식된 전극으로 기록되는 세포외 전기생리학은 높은 시간적 해상도와 공간 정밀도로 인해 선택되는 방법 중 하나이다5. 또한, 인간 EEG에서 얻은 분석과 호환되는 동물의 수면 역학을 특성화할 수 있어 이 방법의 번역 가치를 높일 수 있습니다6.
고전적으로, 세포외 전극으로 뇌 활동을 기록하는 연구는 테트로드(tetrode)7와 같은 개별 와이어 전극 또는 전극 다발을 사용해왔다. 뉴로픽셀(Neuropixels) 프로브(8 )와 같은 최첨단 프로브는 동물을 손상시키지 않고 해당 축을 따라 프로브를 이식할 수 있는 축에 정렬되어 있기 때문에 여러 영역을 동시에 표적으로 할 수 있습니다. 그러나 공간적으로 분리된 여러 영역을 동시에 정확하게 기록하는 것은 여전히 어려운 과제로 남아 있으며, 기존 방법은 비용이 많이 들거나 시간이 많이 소요됩니다.
최근 몇 년 동안 광조형과 같은 적층 제조 방법이 널리 보급되었습니다. 이를 통해 연구자들은 실험 요구 사항9에 적응할 수 있는 새로운 전극 임플란트를 개발할 수 있었으며, 예를 들어 여러 뇌 영역에 대한 단순화된 반복 가능한 표적화도 가능했습니다. 이러한 임플란트 설계는 종종 오픈 소스 하드웨어로 학계와 공유되어 다른 연구자들이 자신의 목적에 맞게 조정할 수 있습니다. 특정 임플란트의 적응 정도는 임플란트가 설계되는 방식과 공유되는 방식에 따라 달라집니다. 파라메트릭 모델링(Parametric Modeling) 10 은 CAD(Computer-Aided Design)에서 널리 사용되는 접근 방식으로, 설계의 여러 구성요소가 상호 의존적인 매개변수와 정의된 설계 이력으로 연결됩니다. 임플란트 설계를 위한 파라메트릭 접근법을 구현하면 임플란트의 재사용성과 적응성이 향상되는데,10 개별 매개변수를 변경하면 복잡한 설계 재모델링 필요 없이 전체 설계가 자동으로 업데이트되기 때문이다. 결과적으로, 설계 자체가 파라메트릭 관계와 설계 기록을 보존하는 편집 가능한 형식으로 공유되어야 합니다. STL 또는 STEP과 같이 기하학적 원형만 나타내는 파일 형식은 게시된 모델의 후속 파라메트릭 수정을 불가능하게 만듭니다.
테트로드 하이퍼드라이브 11,12,13은 수십 개의 테트로드를 녹음할 수 있지만, 조립 및 주입에는 시간이 많이 걸리고 품질은 개별 연구원의 기술과 경험에 크게 좌우됩니다. 또한, 일반적으로 기록 전극을 목표 위치로 안내하는 가이드 튜브를 하나 또는 두 개의 더 큰 번들로 결합하므로 효율적으로 표적화할 수 있는 영역의 수와 확산을 제한합니다.
다른 임플란트(14,15)는 완전한 두개골을 노출시키고, 기록 전극을 운반하는 다수의 개별적인 마이크로드라이브의 자유로운 배치를 허용한다. 수술 시간 동안 독립적인 마이크로드라이브(16)를 배치하는 것은 유연성을 극대화하는 반면, 이는 수술 시간을 증가시키고 개별 마이크로드라이브의 공간 요구로 인해 여러 인접 영역을 대상으로 하는 것을 어렵게 만들 수 있다. 또한 임플란트는 오픈 소스이지만 STL 파일로만 게시되어 수정이 어렵습니다.
보다 고유한 파라메트릭 철학을 가진 드라이브의 예로는 RatHat17이 있습니다. 두개골의 등쪽 표면 전체를 덮는 수술용 스텐실을 제공함으로써 수술 중 정위 프레임을 사용하지 않고도 여러 뇌 표적을 정확하게 조준할 수 있습니다. 캐뉼라, 옵트로드 또는 테트로드에 대한 다양한 임플란트 변형을 사용할 수 있습니다. 그러나 이 드라이브는 학술 목적으로 무료로 사용할 수 있지만 오픈 소스로 게시되지 않아 연구자들이 임플란트를 평가하고 사용하는 데 장애물이 됩니다.
이 기사에서는 쥐의 세포외 전극 기록을 위한 새로운 3D 프린팅 가능한 임플란트인 TD Drive( 그림 1 참조)를 소개합니다. TD Drive는 기존 솔루션의 일부 단점을 극복하는 것을 목표로 합니다: 독립적인 와이어 전극을 동시에 사용하여 양쪽 반구에 걸쳐 미러링된 여러 뇌 영역을 대상으로 할 수 있습니다. 단순한 디자인으로 인해 경험이 부족한 연구원이 상대적으로 저렴한 비용으로 몇 시간 안에 조립할 수 있습니다. TD Drive는 쉽게 수정할 수 있는 파일 형식으로 오픈 소스로 게시되어 연구원이 특정 요구 사항에 맞게 조정할 수 있습니다. TD Drive의 설계 프로세스 초기부터 파라메트릭 3D 모델링 접근 방식을 통합하면 필요한 매개변수를 추상화할 수 있습니다: 대상 위치를 변경하기 위해 연구원은 드라이브를 직접 재설계할 필요 없이 배측 및 전후 좌표를 나타내는 매개변수를 간단히 편집할 수 있습니다. TD 드라이브를 수정하고 제조하기 위한 파일은 https://github.com/3Dneuro/TD_Drive 에서 찾을 수 있습니다.

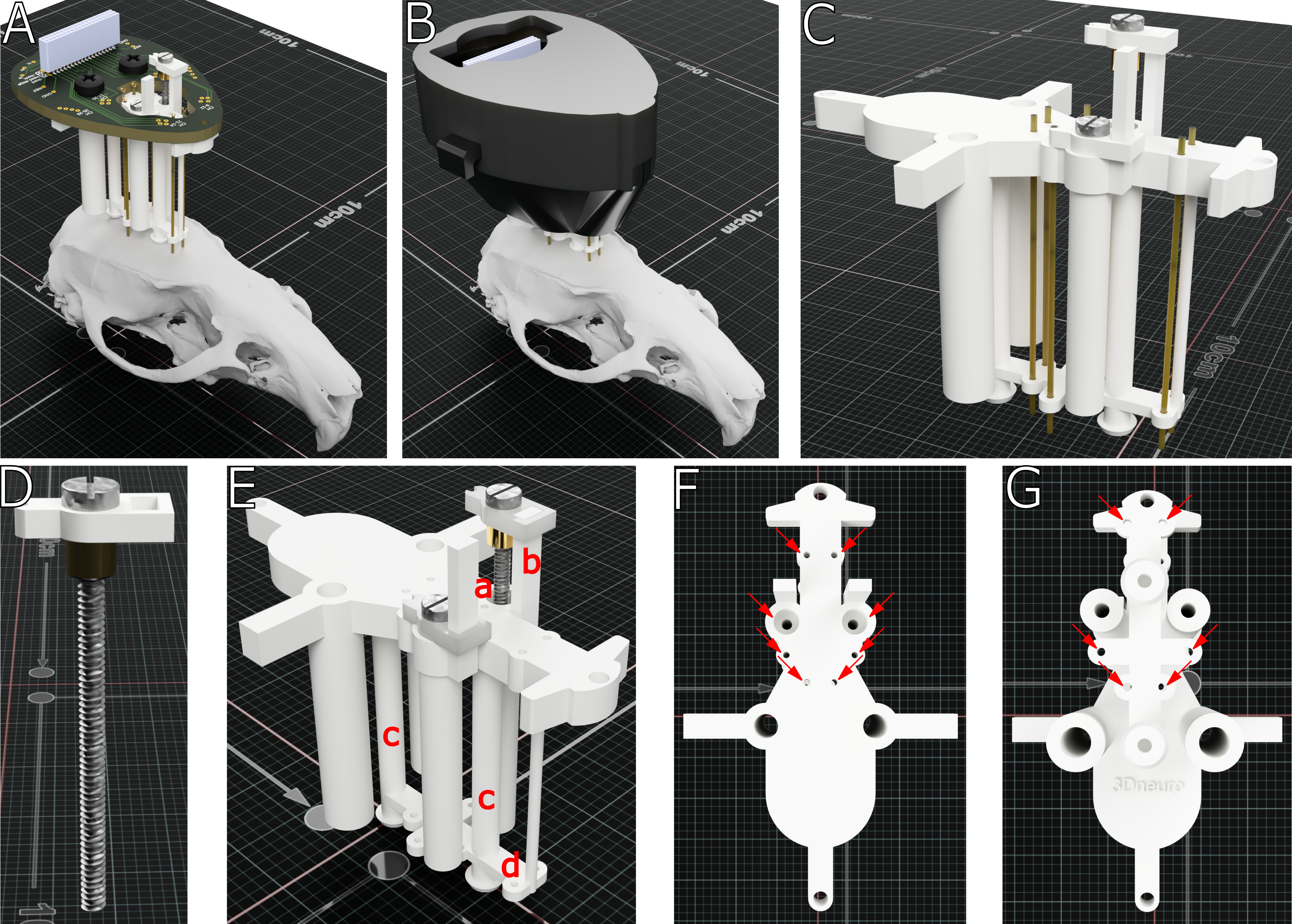
그림 1: TD 드라이브 개요. (A) 보호 캡이 있는 TD 드라이브의 렌더링. (B) 표시된 내부 부품으로 렌더링합니다. TD Drive는 (a) 고정 및 이동 가능한 전극 와이어를 위한 파라메트릭으로 조정 가능한 여러 레코딩 위치, (b) 일반적인 테더링 및 무선 데이터 수집 시스템과 호환되는 고밀도 Omnetics 커넥터가 있는 EIB, (c) Intan/Open Ephys 시스템( 보충 그림 1 참조) 및 (d) 테더링 녹음 중 및 헤드가 연결되지 않은 경우 임플란트를 보호하기 위한 캡tage. (C) TD Drive 하단의 가이드 스텐실은 가이드 캐뉼라의 배치를 용이하게 하고 수술 중 임플란트 위치를 중복으로 확인하는 역할을 합니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
임플란트 설계는 n = 4에서 시범 실시되었고, n = 8에서 검증되었으며, 다른 작업을 수행 한 n= 8 리스터 후드 쥐에서 확인되었습니다. 처음 4마리의 동물은 드라이브를 개발하고 매개변수를 조정하는 데 사용되었습니다. 그런 다음 8 마리의 동물로 전체 파일럿을 실행했습니다 (결과에 표시됨). 8마리의 동물로 구성된 두 번째 코호트를 실행하고 임플란트 생존 분석에 포함시켰습니다. 이 임플란트는 두 개의 서로 다른 상업용 녹음 시스템과 헤드스테이지를 사용하여 대형 미로(HexMaze 9m x 5m)에서 무선 녹음뿐만 아니라 테더링 수면 녹음 및 야외 녹음(Object Exploration)과 호환되었습니다. 8명으로 구성된 두 코호트는 두 가지 다른 획득 시스템으로 녹음되었습니다 - 더 긴 수면 녹음을 위한 테더링과 대규모 미로 탐험 녹음을 위한 무선. 우리는 이 간단한 와이어 드라이브를 통해 경험이 적은 연구자들이 더 큰 코호트를 대상으로 장기간 실험을 할 수 있어 수면 단계 분석과 여러 뇌 영역의 진동 분석을 가능하게 한다는 결론을 내릴 수 있습니다. 이는 현재까지 대부분의 전기생리학 임플란트와 대조를 이루며, 난이도와 시간 강도로 인해 더 작은 동물 코호트를 허용하고 일반적으로 매우 경험이 풍부한 실험자가 필요합니다. 그러나 이 드라이브를 사용하면 개별 뉴런 활동을 기록할 수 없습니다. 따라서 사용은 LFP(Local Field Potential) 및 합산 활성의 조사로 제한됩니다.
프로토콜
본 연구는 네덜란드 중앙위원회(CCD)의 승인을 받았으며 동물실험법(프로토콜 코드: 2020-0020-006 및 2020-0020-010)에 따라 수행되었습니다. 도착 후 9-12 주까지의 수컷 Lister Hooded rats가 사용되었습니다. 프로토콜에 사용된 시약과 장비는 재료 표에 나열되어 있습니다. 드라이브 구축 프로세스의 단계에 대해서는 Supplementary Figure 1 및 Supplementary Figure 2 를 참조하십시오.
1. 3D 모델 및 EIB(Electrode Interface Board) 데이터 조정 및 생성
- Autodesk Fusion에서 드라이브 본체 설계를 엽니다. Modify(수정) 탭에서 Change Parameters(매개변수 변경)를 클릭합니다. anteroPosteriorSite1에 전후 좌표를 입력하고 medioLateralSite1에 내측 좌표를 입력하여 첫 번째 기록 위치의 좌표를 조정합니다. diameterSite1을 조정하여 가이드 튜브 또는 전극의 구멍 직경을 조정할 수 있습니다. 기록 위치 2와 3에 대해 반복하면 모델 디자인이 자동으로 조정됩니다.
참고: 현재 프로토콜에 사용되는 세 가지 위치는 이동 가능한 와이어 다발을 포함하는 해마(HPC)와 고정 와이어 다발이 있는 전두엽(PFC) 및 후비장(RSC) 피질입니다(PFC 와이어 다발은 전변연계(PRL) 및 전대상(ACC) 피질을 모두 대상으로 함). 표 1 은 기록 사이트의 중간 좌표를 제어하는 매개변수에 수동으로 부과된 제한을 제공합니다. - 브라우저에서 업데이트된 드라이브 본문을 마우스 오른쪽 버튼으로 클릭하고 Save As Mesh를 선택하여 내보냅니다. STL(바이너리) 유형, 단위 mm 및 미세 조정 높음을 선택합니다.
- 일반 대문자에 대해 준비된 STL 파일을 선택하거나 필요한 경우(예: 대상이 매우 측면인 경우) 큰 대문자에 대해 준비된 STL 파일을 선택합니다.
- 어떤 캡을 선택하느냐에 따라 생산을 위해 일반 EIB 또는 대형 EIB를 선택하십시오. 두 EIB에 대한 Gerber 생산 파일은 제조 서비스로 직접 보낼 수 있는 zip 아카이브로 제공됩니다.
2. 3D 모델 인쇄 및 EIB 제조
참고: 본 연구에서는 시판되는 3D 프린터를 사용하여 부품을 생산했습니다( 재료 표 참조). 다른 프린터를 사용하거나 생산을 아웃소싱할 때 부품 생산을 위해 다른 유사한 수지를 사용해야 할 수 있습니다.
- 광 조형 기법9 를 사용하여 25 μm 층 높이의 일반 또는 생체 적합성 레진(예: Clear, Black 또는 White 레진)에 고해상도로 드라이브 본체와 셔틀을 인쇄합니다. 캡 부품을 강하고 견고한 레진(예: Tough 2000)으로 인쇄합니다.
- EIB는 사내에서 제조하거나 외부 서비스 제공업체에서 생산하도록 합니다. SMD(Surface Mounted Device) 납땜 기술을 사용하여 고밀도 커넥터를 EIB에 납땜합니다.
알림: 정밀 전자 부품 납땜 경험이 없는 경우 예를 들어 외부에서 납땜을 수행하는 것이 좋습니다.ample, 대학의 전자 작업장 또는 상업 공급업체에서. 커넥터 주위에 강한 에폭시를 도포하여 납땜된 고밀도 커넥터를 강화합니다. 전극의 구멍을 에폭시로 덮지 않도록 주의하십시오.
3. 3D 프린팅 바디의 후처리
알림: 캡과 셔틀은 후처리가 필요하지 않습니다. 3D 프린트의 품질에 따라 가볍게 샌딩하거나 남은 서포트 흔적을 제거해야 할 수도 있습니다. 샌딩 및 드릴링 할 때 드라이브 본체의 벽이 부러지지 않도록 주의하십시오. 필요한 경우 이소프로판올, 부드러운 천 및/또는 압축 공기로 후처리 부품을 청소합니다.
- 핀 바이스에 장착된 0.5mm 드릴 비트를 사용하여 드라이브 본체의 상단과 하단에 있는 가이드 튜브용 구멍을 뚫습니다. 이렇게 하면 사이트 전체에서 차원이 정확하고 일관성이 유지됩니다.
- 핀 바이스의 2mm 드릴 비트를 사용하여 셔틀 황동 인서트의 구동 본체에 있는 두 개의 카운터싱크 구멍( 그림 2E 참조)을 뚫습니다.
- 압축 공기로 드릴링 파편으로부터 카운터싱크 구멍을 청소합니다. 그런 다음 카운터싱크 구멍의 연장선인 셔틀 나사의 가이드 구멍을 M1 탭으로 두드립니다. 두 번 이상 탭핑을 수행하여 반복 사이에 탭과 구멍에서 이물질을 청소합니다. 선택적으로 미네랄 오일 한 방울로 수도꼭지를 윤활하십시오.
- 압축 공기로 이물질을 드릴링하고 두드리지 않도록 드라이브 본체를 청소합니다.

그림 2: TD 드라이브의 렌더링. (A,B) TD 드라이브 (A) 보호 캡이 없는 (B) 쥐 두개골 모델에 보호 캡이 있는 모델. (C) 폴리이미드 가이드 튜브가 6개의 기록 사이트 각각에 올바르게 삽입되어야 합니다. (D) 가이드 나사, 3D 프린팅 셔틀 및 납땜 황동 인서트를 특징으로 하는 분리되고 완성된 셔틀 어셈블리. (E) 두 개의 셔틀이 삽입된 TD 드라이브 본체. 빨간색으로 표시: (a) 셔틀용 카운터싱크 구멍, (b) 셔틀 가이드, (c) 구동 본체의 중앙 받침대, (d) 가이드 스텐실. (에프,지) 3D 프린팅 후 후처리가 필요할 수 있는 드라이브 본체의 상단(F) 및 하단(G)의 중요한 위치는 각각 빨간색 화살표로 표시됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
4. 셔틀 어셈블리
- 3D 프린팅 셔틀을 M1x16 나사에 밀어 넣습니다. M1 황동 인서트를 사용하여 3D 프린팅 셔틀을 제자리에 고정합니다. 셔틀은 인서트를 배치한 후 위아래로 움직이지 않고 자유롭게 회전할 수 있어야 합니다.
주의 : 다음 단계에는 화상 위험(납땜)이 포함됩니다. 사용된 솔더 및 솔더링 플럭스에 따라 호흡기 자극 물질 및 납에 대한 노출이 포함될 수 있습니다. 납땜할 때는 항상 보안경을 착용하고(땜납이 튕길 수 있으므로) 납땜 연기를 추출하기 위한 작업 공간의 적절한 환기를 포함하여 잠재적으로 유해한 물질의 안전한 취급을 위한 적절한 지침을 따르십시오. 현지 규정 및 운영 절차를 따르거나 온라인에서 사용 가능한 자료를 참조하십시오18,19. - 소량의 납땜 페이스트를 사용하여 황동 인서트를 나사에 납땜합니다. 3D 프린팅 셔틀이 녹지 않도록 인서트와 나사가 과열되지 않도록 주의하십시오. 셔틀의 3D 프린팅에 사용되는 레진에 따라 소량의 용융(그리고 결과적으로 셔틀이 인서트에 달라붙는 것)을 피하기 어렵습니다.
알림: 스테인리스강 나사를 사용할 때 솔더 플럭스가 필요할 수 있습니다. 황동 또는 기계 강철 나사를 사용하는 것이 좋습니다., 납땜이 더 쉽기 때문에. - 셔틀 어셈블리를 식힌 후 3D 프린팅 셔틀을 나사 주위로 여러 번 부드럽게 돌립니다. 셔틀이 납땜 중에 인서트에 융합되면 해제되어야 합니다.
알림: 셔틀이 자유롭게 회전할 수 있고 흔들리지 않는지 확인하십시오. 그렇다면 셔틀 어셈블리를 버리고 새 어셈블리를 시작하십시오. 황동 인서트를 조심스럽게 회전시키십시오. 나사에 대해 회전하면 납땜 과정을 반복하십시오.
5. 드라이브 조립
- 시중에서 판매되는 폴리이미드 튜브의 길이는 약 25mm로 자르되 최소한 전체 구동 본체를 통과할 수 있을 만큼 충분히 길게 자릅니다.
- 폴리이미드 가이드 튜브를 드라이브 본체에 삽입합니다. 각 튜브는 드라이브 상단에 있는 하나의 구멍과 드라이브 하단의 가이드 스텐실에 있는 해당 구멍( 그림 2E의 "d")을 통해 삽입해야 합니다. 튜브는 드라이브 본체의 상단과 같은 높이가 될 때까지 삽입해야 합니다.
- 얇은 바늘이나 이쑤시개를 사용하여 드라이브 본체 상단의 구멍에 소량의 액체 시아노아크릴레이트 접착제를 바르고 가이드 튜브를 제자리에 고정합니다. 접착제가 가이드 튜브로 흘러 들어가지 않도록 본체 하단에서 접착제를 바릅니다. 접착제는 모세관력에 의해 구동 본체와 가이드 튜브 사이의 공간으로 당겨져 둘을 연결합니다.
- 가이드 튜브와 드라이브 본체 하단의 가이드 스텐실 사이의 인터페이스에 소량의 시아노아크릴레이트 접착제를 바릅니다. 다시 말하지만, 접착제로 가이드 튜브가 막히지 않도록 주의하십시오. 접착제를 몇 분 동안 말리십시오.
알림: 필요한 정확한 시간은 드라이브 재료와 드라이브 본체와 가이드 튜브 사이의 간격에 따라 다릅니다. 일반적으로 5-10분이면 충분합니다. - 드라이브 본체를 거꾸로 뒤집고 하단의 폴리이미드 가이드 튜브를 절단하여 드라이브 본체의 중앙 받침대( 그림 2E 및 보충 그림 2의 "c")를 약 1mm 확장하도록 합니다. 이 구성에서 가이드 튜브의 끝은 이식 시 뇌 표면과 같은 높이가 됩니다.
참고: 이 드라이브는 뇌의 더 깊은 영역을 대상으로 개발되었습니다. 표재성 피질 영역을 대상으로 하는 경우, 초기 뇌 부종의 경우 뇌 표면을 손상시키지 않도록 더 짧은 폴리이미드 가이드 튜브가 필요할 수 있습니다. - 드라이브 본체에 두 개의 셔틀 어셈블리를 삽입합니다. 탭된 가이드 구멍에 나사를 조이는 동안 나사가 셔틀 가이드( 그림 2E의 "b")와 평행한지 확인하십시오. 손가락을 사용하여 셔틀을 셔틀 가이드에 부드럽게 맞춥니다.
- 셔틀을 카운터싱크 구멍에 완전히 나사로 고정하여 셔틀 어셈블리의 황동 인서트가 구동 본체에 끼거나 폴리이미드 가이드 튜브와 충돌하지 않는지 확인합니다. 이 프로토콜의 경우 최소 16번의 풀 턴의 거리가 필요합니다. 이 방법이 닿지 않으면 드라이브 본체 상단의 폴리이미드 튜브를 더 절단하여 더 많은 공간을 만드십시오. 드라이브 본체의 셔틀을 과도하게 조이지 마십시오 - 드라이브 본체의 갇힌 나사산과 셔틀 어셈블리의 납땜 연결이 파괴될 수 있습니다.
알림: 셔틀 어셈블리가 끼면 완전히 제거하고 솔더 연결이 느슨해졌는지 확인하십시오. 이 경우 새 셔틀 어셈블리를 사용하십시오. 셔틀 어셈블리가 가이드 튜브와 충돌하는 경우 가이드 튜브가 구동 본체를 넘어 확장되지 않도록 가이드 튜브를 줄이십시오. - M2.5x5 폴리이미드 나사를 사용하여 EIB를 드라이브 본체에 나사로 고정합니다. 드라이브 본체와 EIB 사이에 시아노아크릴레이트 접착제 몇 방울을 바릅니다. 전극 연결을 위한 관통 구멍이 막히지 않도록 하십시오.
6. 보호 커버 준비
- 스테인레스 스틸 M2 너트를 왼쪽 캡 절반의 돌출부에 삽입하고 시아 노 아크릴 레이트 접착제로 고정합니다.
- 필요한 경우 핀 바이스의 M1 드릴 비트로 왼쪽 캡 전면에 있는 구멍을 뚫습니다. M1 탭으로 오른쪽 캡 절반 전면의 구멍을 두드립니다.
7. 와이어 전극 준비
- 전극 와이어 번들을 만들기 위한 표면으로 두 개의 금속판을 준비합니다. 플레이트는 평평하고 안정적이지만 움직일 수 있는 표면 역할을 하여 와이어 번들 조립, 접착 및 절단이 발생합니다. 첫 번째 판에 플로팅 용지를 붙이고 끈적한 표면이 위를 향하도록 두 번째 판에 두 개의 접착 페인팅 테이프를 매듭을 짓습니다.
- HPC 번들에 있는 4개의 와이어 중 3개는 60도 각도로 절단되어 등쪽 방향으로 오프셋을 생성합니다. 이렇게 하면 해마 피라미드 층의 위, 내부 및 아래에 각각 와이어를 배치할 수 있습니다. 절단을 용이하게 하려면 플로팅 용지에 60도 각도로 명확한 선(60도 선)을 그립니다.
- 각 HPC 전극 번들에 대해 각각 4cm 길이의 전극 와이어 4개를 절단합니다. 각 PFC 및 RSC 전극 번들에 대해 각각 4cm 길이의 전극 와이어 3.5개를 절단합니다.
- 4개의 전선을 손가락 끝으로 터치하여 부드럽게 집고(붙습니다) 페인팅 테이프에 가능한 한 가깝게 놓습니다. 서로 위에 올려 놓지 않도록 하십시오.
- 현미경 아래에서 집게를 사용하여 전선을 가능한 한 가깝게 배치합니다. 번들 상단의 처음 2cm에 액체 시아노아크릴레이트 접착제를 얇게 바릅니다. HPC 번들의 경우 와이어의 2cm와 < 3.5cm를 > 붙입니다. 접착제가 마를 때까지 기다리십시오.
- 현미경으로 집게로 전선을 부드럽게 만지십시오. 분리되지 않으면 올바르게 접착됩니다. 온전성 검사로 접착제 층이 현미경의 조명 아래에서 빛나는지 확인하십시오.
- 완전히 건조되면 테이프에서 와이어 번들을 제거하고 플로팅 페이퍼가 있는 플레이트로 옮깁니다. 현미경으로 와이어 번들의 상단이나 측면에 과도한 접착제가 있는지 확인하고 메스 블레이드로 조심스럽게 제거합니다.
- RSC 번들의 경우 와이어 방향에 수직으로 어레이 하단을 직선으로 절단합니다.
- HPC 번들의 경우 60도 선과 교차하도록 플로팅 용지에 어레이를 놓고 선을 가이드로 사용하여 와이어 방향에 대해 60도 각도로 절단합니다.
- 그런 다음 메스 칼날을 사용하여 번들에서 4개의 와이어 중 가장 짧은 와이어를 조심스럽게 분리합니다. 와이어 방향에 수직으로 와이어를 절단하여 번들에서 두 번째로 긴 와이어에 비해 약 0.75mm로 줄입니다.
- PFC 번들의 경우 어레이 하단을 두 개의 2-와이어 번들로 분할합니다. 두 전선이 잘 붙어 있는지 확인하십시오. 2-와이어 번들 중 하나를 와이어 방향에 수직으로 절단하여 1mm 줄입니다. 절단된 와이어 번들의 이미지는 보충 그림 1 (하단) 및 보충 그림 2b 를 참조하십시오.
8. 접지선 및 EEG 전선 준비
- 1.27mm 피치로 상호 연결된 SIP/DIP 소켓 스트립에서 최소 10개의 SIP/DIP 핀을 밀어냅니다.
- 접지(GND) 와이어용 2cm 길이의 6개를 자릅니다. EEG 와이어를 위해 8cm 길이의 6개를 자릅니다. 메스 블레이드를 사용하여 모든 전선의 양쪽 끝에서 절연체의 일부를 조심스럽게 제거합니다.
- M1x3 스테인리스강 나사를 세 번째 손에 넣고 나사 머리 아래에 가능한 한 많은 공간을 남겨 둡니다. GND 또는 EEG 와이어의 절연되지 않은 면을 나사 머리 바로 아래에 있는 나사 생크 주위에 감습니다.
- 작은 바늘이나 이쑤시개로 소량의 솔더 플럭스를 바르십시오. 와이어를 나사에 납땜합니다. 나사 머리의 슬롯을 실수로 막지 않도록 하십시오.
- 암 쪽에 접근할 수 있도록 세 번째 손에 SIP/DIP 핀을 놓습니다. 전선 반대쪽의 절연이 제거된 부분을 SIP/DIP 핀에 삽입합니다. 소량의 솔더 플럭스를 적용하고 와이어를 핀에 납땜합니다.
- 홀더에서 납땜된 나사 와이어 어셈블리를 제거합니다. 이 어셈블리는 이식 수술 중에 두개골에 이식됩니다.
- 다른 SIP/DIP 핀을 홀더에 180도 회전하여 놓습니다(즉, 수 쪽 접근 가능). 소량의 솔더 플럭스를 적용하고 다른 와이어의 절연되지 않은 면을 핀의 수 쪽에 납땜합니다.
- 홀더에서 납땜된 와이어 핀 어셈블리를 제거합니다. 이 어셈블리는 나중에 EIB에 연결되고 스크류 와이어 어셈블리와 와이어 핀 어셈블리는 두 개의 핀을 사용하여 이식 수술 중에 서로 연결됩니다.
- 납땜 연결을 강화하려면 와이어와 핀 사이의 연결부에 소량의 시아노아크릴레이트 접착제를 바르십시오.
- 접착제가 건조된 후 두 어셈블리의 SIP/DIP 핀이 원활하게 연결될 수 있는지 확인하십시오. 멀티미터의 연속성 검사(check continuity) 옵션을 사용하여 두 어셈블리가 모두 연결되어 있을 때 와이어 핀 어셈블리의 절연 제거된 와이어 끝과 스크류가 연속적으로 연결되어 있는지 확인합니다. 선택적으로, 임플란트 수술 중 올바른 연결을 단순화하기 위해 매니큐어로 각 와이어 세트를 색상 코드화합니다( 재료 표 참조).
9. 와이어 번들을 드라이브에 적재
- 드라이브를 홀더에 부착합니다. 이 단계에서 EIB에 너무 많은 압력을 가하거나 고밀도 커넥터를 손상시키지 않도록 주의하십시오.
- 구동 본체가 안정적인 위치에 있으면 와이어 번들 중 하나를 손으로 또는 한 쌍의 가는 집게를 사용하여 해당 폴리이미드 튜브에 조심스럽게 밀어 넣습니다. 와이어 어레이가 올바른 방향으로 배치되었는지 확인하고(예: PFC 어레이의 경우 어레이의 두 개의 긴 와이어가 내측을 향해야 함) 와이어 어레이가 구부러지지 않도록 주의하십시오.
- 다른 모든 와이어 번들에 대해 마지막 단계를 반복합니다.
- 얇은 집게를 사용하여 전선 중 하나를 잡고 삽입하려는 구멍 쪽으로 조심스럽게 구부립니다. 삽입한 후에는 금색 핀을 사용하여 EIB 구멍에 핀으로 고정합니다. 번들의 모든 와이어와 모든 번들에 대해 이 작업을 반복합니다.
- 이 단계에서 와이어가 EIB 위에 멋진 고리를 만들고(이렇게 하면 튜브 하단의 길이를 조정하기 위해 폴리이미드 튜브 위아래로 번들을 이동할 수 있는 공간이 여전히 있음) 폴리이미드 튜브 바닥에서 튀어나온 어레이가 실수로 구부러지지 않도록 합니다. 각 와이어 번들의 어떤 와이어가 EIB의 각 채널에 연결되는지 기록해 두십시오. TD Drive의 채널 매핑에 대한 자세한 내용은 보충 그림 1 을 참조하십시오.
알림: 또는 각 와이어 번들을 로드한 후(9.2단계) 와이어를 EIB에 직접 연결하고(9.4단계) 나머지 와이어 번들에 대해 9.2 + 9.4단계를 진행할 수 있습니다. 이것은 실험자의 개인 취향에 따라 달라질 수 있습니다. 보충 그림 2b 를 참조하여 로드된 TD 드라이브의 예를 참조하십시오.
- 이 단계에서 와이어가 EIB 위에 멋진 고리를 만들고(이렇게 하면 튜브 하단의 길이를 조정하기 위해 폴리이미드 튜브 위아래로 번들을 이동할 수 있는 공간이 여전히 있음) 폴리이미드 튜브 바닥에서 튀어나온 어레이가 실수로 구부러지지 않도록 합니다. 각 와이어 번들의 어떤 와이어가 EIB의 각 채널에 연결되는지 기록해 두십시오. TD Drive의 채널 매핑에 대한 자세한 내용은 보충 그림 1 을 참조하십시오.
- 와이어 번들을 가이드 튜브 안팎으로 부드럽게 밀거나 당겨 녹음 위치를 올바르게 지정하도록 와이어 번들의 길이를 조정합니다( 보충 그림 2d 참조).
참고: 가이드 튜브가 뇌 표면과 같은 높이로 절단되기 때문에 와이어 다발이 가이드 튜브를 넘어 확장되는 거리는 대상 영역의 등쪽 위치에 해당합니다. 이동식 HPC 와이어 번들은 가이드 튜브의 바닥과 같은 높이에 있어야 하고, 고정 RSC 번들은 1.5mm, 고정 PFC 번들은 가이드 튜브를 넘어 3.5mm 확장되어야 합니다. 와이어 어셈블리를 밀거나 당길 때 상단의 EIB에서 개별 와이어를 잡아당기거나 와이어 번들의 하단을 구부리지 않도록 주의하십시오. - 고정 와이어 어레이(RSC 및 PFC)가 정렬되면 가이드 튜브 상단에 소량의 강력한 에폭시 접착제를 바르고 번들을 제자리에 붙입니다. 에폭시가 경화되는 동안 와이어 번들이 여전히 바닥에 올바르게 정렬되어 있는지 확인하십시오.
- 이동식 HPC 와이어 어레이를 고정하려면 먼저 셔틀을 필요한 가장 높은 위치로 이동합니다(이 문서에 설명된 실험에서는 가장 낮은 위치에서 최소 16회전/4mm 위). 그런 다음 와이어 번들을 셔틀의 U자형 개구부에 밀어 넣고 소량의 강력한 에폭시 접착제로 제자리에 붙입니다.
알림: 에폭시가 번들을 따라 폴리이미드 튜브로 흘러 들어가지 않도록 하십시오. 에폭시가 경화되면 같은 지점에 두 번째 에폭시 층을 적용하여 연결을 강화하고 셔틀을 이동할 때 연결이 끊어질 가능성을 줄입니다. - GND로 표시된 관통 구멍 중 하나를 통해 GND 와이어의 와이어 핀 어셈블리의 열린 끝을 조심스럽게 삽입합니다. 금색 핀을 사용하여 고정합니다.
알림: 헤드를 사용할 때tage GND 및 참조(REF) 채널이 단락된 경우 더 편리한 경우 REF 채널도 사용할 수 있습니다. - 홀더에서 드라이브를 제거하십시오. 와이어 어셈블리가 구부러지지 않도록 주의하십시오. 드라이브의 전면 부분을 동일한 홀더에 다시 부착하고 4개의 EEG 와이어 핀 어셈블리를 EEG 채널(2,4, 29, 31로 표시)의 관통 구멍에 삽입하고 각각 금색 핀으로 고정합니다.
- 모든 GND 및 EEG 와이어의 경우 연속성 설정에서 멀티미터를 사용하여 EIB의 금색 핀과 연결된 와이어 핀 어셈블리의 핀 간의 연속 연결을 확인합니다.
- 드라이브를 저장합니다. 예를 들어, 캡을 드라이브 본체에 부착하고 거꾸로 보관하면 됩니다.
알림: 외과적 이식 전에 에탄올을 사용하여 드라이브 바닥을 멸균하십시오. 모든 뼈 나사와 GND/EEG 와이어 어셈블리는 에탄올로 멸균해야 합니다. 수술 기구는 오토클레이브를 통해 멸균해야 합니다.
10. 임플란트 수술 추진
참고: 이 단계에서는 TD 드라이브를 이식하기 위한 수술 절차를 간략하게 설명합니다. 도구에 대한 설명, 약물의 용량 및 농도를 포함한 보다 광범위한 이식 프로토콜은 보충 파일 1에서 찾을 수 있습니다.
- 수술 도구를 소독하고 현지 기관 지침에 따라 수술 부위를 청소하고 소독합니다. 임플란트를 멸균하려면 뇌와 접촉할 전극 와이어 부분을 에탄올에 최소 1분 동안 넣습니다.
알림: 에탄올 또는 그 연기에 장기간 노출되면 시아노아크릴레이트 접착제가 약해질 수 있습니다. 연기가 갇히지 않으면 전선을 에탄올에 담그는 시간을 연장하십시오. 접착제의 무결성을 확인하기 위해서는 실제 실험에 사용되지 않는 테스트 임플란트로 최적의 시간을 찾는 것이 좋습니다. - 기관 및 지역 지침에 따라 필요한 사전 진통제, 항생제 및 가스 마취(이소플루란)를 제공합니다.
- 쥐를 정위 장치에 넣으십시오. 정수리를 면도하고 포비돈 요오드로 피부를 소독합니다. 국소 마취제(리도카인)를 피하로 바르고 정중선 위의 두개골을 작게 절개합니다.
- 피부를 옆으로 당겨 두개골을 노출시킵니다. 두개골 상단의 결합 조직을 제거하고 건조시킨 다음 두개골 표면을 청소합니다. 고정 나사를 배치할 수 있도록 두개골 측면의 근육을 부드럽게 분리합니다.
- 브레그마와 람다 좌표를 측정합니다. 정확한 조준을 위해 두개골 표면이 브레그마와 람다의 등쪽 위치의 차이를 측정하여 입체체의 전후방-내측 평면과 평행한지 확인하십시오. 좌표가 다른 경우 마우스피스를 올리거나 내려 스테레오택스에서 쥐의 위치를 조정합니다.
- 대상 위치(전변연계 피질(AP +3.5mm 및 ML + -1mm), 후비장(AP+5.8mm 및 ML +-1mm 및 해마(AP -3.8mm 및 ML + -2.5mm)) 주변의 개두술을 표시합니다.
- GND/EEG 나사 및 고정 나사용 구멍을 뚫습니다. 나사를 삽입하고 액체 치과용 아크릴로 덮습니다. 개두술을 뚫고 경막을 조심스럽게 제거합니다. 멸균 식염수를 적용하여 두개골 절제술이 건조해지는 것을 방지하십시오.
- TD Drive를 두개골 위에 조심스럽게 배치하여 가이드 튜브가 두개골과 같은 높이가 되도록 합니다. 바셀린으로 가이드 튜브를 보호하고 치과용 아크릴로 TD 드라이브를 두개골에 부착합니다.
- HPC를 대상으로 하는 와이어 어레이를 초기 위치(뇌 표면에서 ~1.5mm DV)에서 해마 CA1의 피라미드 층 쪽으로 천천히 내립니다. 피라미드 층은 쥐의 회복 기간 동안 신호 확인 중에 후속 며칠 동안 점진적으로 도달했습니다.
- 드라이브 주위에 보호 캡을 씌웁니다.
- 가스 마취를 끄고 정위 프레임에서 쥐를 제거합니다. 가열된 챔버 내부의 깨끗한 케이지에 쥐를 넣고 회복을 위해 젖은 음식과 물을 제공합니다. 쥐가 다시 활동하고, 케이지 안에서 움직이고, 먹고, 마실 때까지 모니터링하십시오.
- 쥐를 기숙사로 다시 데려오십시오. 기관 지침에 따라 수술 후 진통제 및 관리를 제공합니다. 예를 들어, 보충 파일 1의 수술 프로토콜의 예를 참조하십시오.
11. EIB 복구
- 실험이 끝나면 드라이브를 복구하고 보호 커버를 제거합니다.
- 금색 핀을 제거하고 전극선을 조심스럽게 연결하십시오. 드라이브 본체에서 EIB의 나사를 풉니다. EIB와 구동 본체 사이의 부드러운 핀셋을 부드럽게 밀어 넣거나 EIB를 손으로 조심스럽게 들어 올려 EIB를 본체에 고정하고 있는 남아 있는 시아노아크릴레이트 결합을 풉니다.
- 후속 TD Drive 임플란트에 재사용할 수 있도록 EIB와 금색 핀을 청소합니다. EIB를 재사용하기 전에 금색 핀 바이어스와 고밀도 커넥터의 마모 여부를 확인하십시오. 비아가 금색 핀, 전극 와이어 및 EIB 간의 양호한 연결을 허용할 만큼 충분히 손상되지 않고 헤드스테이지에 대한 고밀도 커넥터의 연결이 여전히 충분히 안정적인 경우에만 EIB를 재사용하십시오.
결과
프로토콜에 제공된 지침을 사용하여 여러 실험자가 TD 드라이브를 쉽게 구축할 수 있습니다. 드라이브 개발 후(n = 4) 8마리의 동물로 전체 파일럿을 실행했습니다. 추가로 8마리의 동물을 이식하고 실험 데이터 수집을 수행했습니다. 이들 동물에 대한 데이터 분석이 완료되지 않았기 때문에 생존 분석에는 포함되었지만 다른 분석(예: 표적 분석 또는 조직학)에는 포함되지 ...
토론
이 기사에서는 자유롭게 움직이는 쥐를 위한 양측, 대칭 다중 영역 와이어 전극 녹음을 위한 적응형 임플란트를 제시합니다.
사전 정의된 매개변수를 변경하여 임플란트를 쉽게 조정할 수 있는 기능은 TD Drive를 만든 동기 중 하나였습니다. 매개변수 변경에 대한 유연성을 최대화하는 것을 목표로 하지만, 매개변수 간의 관계에 내재된 제약 조건은 필?...
공개
TS와 PvH는 네덜란드 네이메헌에 있는 3Dneuro의 직원입니다. 3Dneuro는 TD Drive를 공동 개발 및 생산합니다.
감사의 말
저자는 드라이브를 개발하는 데 영감을 준 Angela Gomez Fonseca와 동물로 파일럿 실험을 진행한 모든 학생, Milan Bogers, Floor van Ravenswoud 및 Eva Severijnen에게 감사를 표하고 싶습니다. 이 연구는 네덜란드 연구위원회(Dutch Research Council, NWO; 크로스오버 프로그램 17619 "INTENSE").
자료
| Name | Company | Catalog Number | Comments |
| 0.5 mm drill bit | McMaster | 2951A38 | |
| 1.27 mm pitch interconnected SIP/DIP socket (Mill-Max) | Mouser Electronic | 575-003101 | For essembling and connection of EEG & GND screws |
| 5 minute epoxy | Bison | Commercially available | regular off-the-shelf epoxy |
| cyanoacrylate glue | Loctite | Super Glue-3 | |
| EEG wire | Science Products GmbH | 7SS-2T | |
| Electrode wire | Science Products GmbH | NC7620F | |
| Ethanol | LC | For standard pre-operative sterilization procedure of drive | |
| Fine forceps (5) | FST | 91150-20 | For wire bundle preperation and handling |
| Form 3B | Formlabs | 3D printer used to 3D print the self-printed parts of the TD drive | |
| Gold pins (small) | Neuralynx, Inc. | 9885 | Attachment of electorde wires to EIB board |
| Ground wire | Science Products GmbH | SS-3T/A | |
| High-density connector | LabMaker GmbH/Omnetics | A79026-001 | |
| Lister Hodded rats | Charles River Laboratories | Crl:LIS | we used male rats, 9-12 weeks of age at arrival |
| M1 brass insert | AliExpress | Commercially available | https://aliexpress.com/item/33047616164.html |
| M1 tap | McMaster | 2504A33 | |
| M1x16 screw | Bossard | 1096613 | |
| M1x3 stainless steel screws | Screws and More | 84213_14985 | |
| M2.5x5 polyimide screws | Screws and more | 7985PA25S_50 | |
| mineral oil | McMaster | 1244K14 | |
| Nail polish | Etos | Commercially available | For color coding EEG and GND wires |
| painter's tape | Gamma | Commercially available | For wire bundle preperation |
| Pin vise | McMaster | 8455A16 | |
| plotting paper | Canson | Commercially available | For wire bundle preperation |
| polyimide tubes | Amazon / Small Parts | TWPT-0159-30-50 | AWG, 0.0159" ID, 0.0219" OD, 0.0030" Wall, 30" Length |
| RHD 32-channel headstage with accelerometer | Intan Technologies, LLC | C3324 | For tethered recordings in the sleepbox |
| RHD 3-ft (0.9 m) standard SPI cables | Intan Technologies, LLC | C3203 | From commutator to headstage |
| RHD 6-ft (1.8 m) standard SPI cables | Intan Technologies, LLC | C3206 | From OpenEphys box to commutator |
| Slip Ring with Flange | Adafruit | 1196 | Commutator: 22 mm diameter, 12 wires |
| Solder flux | Griffon S-39 50 ml | Commercially available | For soldering EEG & GND screws |
| soldering paste | Amazon | B08CBZ5HC5 | |
| stainless steel M2 nut | McMaster | 93935A305 | |
| Tethered recording setup | OpenEphys | Acquasition Board | |
| Wireless recording logger | SpikeGadgets | miniLogger 32 | For wireless recordings in the task |
| Wireless recording setup | SpikeGadgets | Main Control Unit (MCU) incl. breakout board and RF transceiver | For wireless recordings in the task |
참고문헌
- Deffieux, T., Demené, C., Tanter, M. Functional Ultrasound Imaging: A New Imaging Modality for Neuroscience. Neuroscience. 474, 110-121 (2021).
- Finn, E. S., Poldrack, R. A., Shine, J. M. Functional neuroimaging as a catalyst for integrated neuroscience. Nature. 623 (7986), 263-273 (2023).
- Aharoni, D., Federico Guo, C. Aharoni-Lab/Miniscope-v4: Release for generating. GitHub. , (2023).
- Takasaki, K., Abbasi-Asl, R., Waters, J. Superficial bound of the depth limit of two-photon imaging in mouse brain. eNeuro. 7 (1), (2020).
- Buzsáki, G., et al. Tools for probing local circuits: High-density silicon probes combined with optogenetics. Neuron. 86 (1), 92-105 (2015).
- Lacroix, M. M., et al. Improved sleep scoring in mice reveals human-like stages. bioRxi.v. , (2018).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Sci New Ser. 261 (5124), 1055-1058 (1993).
- Jun, J. J., et al. Fully integrated silicon probes for high-density recording of neural activity. Nature. 551 (7679), 232-236 (2017).
- Headley, D. B., DeLucca, M. V., Haufler, D., Paré, D. Incorporating 3D-printing technology in the design of head-caps and electrode drives for recording neurons in multiple brain regions. J Neurophysiol. 113 (7), 2721-2732 (2015).
- Camba, J. D., Contero, M., Company, P. Parametric CAD modeling: An analysis of strategies for design reusability. Comput Aided Des. 74, 18-31 (2016).
- Kloosterman, F., et al. Micro-drive array for chronic in vivo recording: Drive fabrication. J Vis Exp. (26), e1094 (2009).
- Voigts, J., Siegle, J. H., Pritchett, D. L., Moore, C. I. The flexDrive: An ultra-light implant for optical control and highly parallel chronic recording of neuronal ensembles in freely moving mice. Front Syst Neurosci. 7, (2013).
- Voigts, J., Newman, J. P., Wilson, M. A., Harnett, M. T. An easy-to-assemble, robust, and lightweight drive implant for chronic tetrode recordings in freely moving animals. J Neural Eng. 17 (2), 026044 (2020).
- Sheng, T., et al. A novel 3D-printed multi-driven system for large-scale neurophysiological recordings in multiple brain regions. J Neurosci Methods. 361, 109286 (2021).
- Vöröslakos, M., Petersen, P. C., Vöröslakos, B., Buzsáki, G. Metal microdrive and head cap system for silicon probe recovery in freely moving rodent. eLife. 10, e65859 (2021).
- Mishra, A., Marzban, N., Cohen, M. X., Englitz, B. Dynamics of neural microstates in the VTA-striatal-prefrontal loop during novelty exploration in the rat. bioRxiv. , (2020).
- Allen, L. M., et al. RatHat: A self-targeting printable brain implant system. eNeuro. 7 (2), (2020).
- . Soldering Safety Available from: https://safety.eng.cam.ac.uk/safe-working/copy_of_soldering-safety (2018)
- . Harvard Soldering Safety Guidelines Available from: https://www.ehs.harvard.edu/sites/default/files/soldering_safety_guidelines.pdf (2019)
- Samanta, A., et al. CBD lengthens sleep but shortens ripples and leads to intact simple but worse cumulative memory. iScience. 26 (11), 108327 (2023).
- Machado, F., Malpica, N., Borromeo, S. Parametric CAD modeling for open source scientific hardware: Comparing OpenSCAD and FreeCAD Python scripts. PLOS One. 14 (12), e0225795 (2019).
- Schwarz, C., et al. The head-fixed behaving rat: Procedures and pitfalls. Somatosens Mot Res. 27 (4), 131-148 (2010).
- Gardiner, T. W., Toth, L. A. Stereotactic surgery and long-term maintenance of cranial implants in research animals. Contemp Top Lab Anim Sci. 38 (1), 56-63 (1999).
- França, A. S. C., van Hulten, J. A., Cohen, M. X. Low-cost and versatile electrodes for extracellular chronic recordings in rodents. Heliyon. 6 (9), e04867 (2020).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유