
Un abonnement à JoVE est nécessaire pour voir ce contenu. Connectez-vous ou commencez votre essai gratuit.
Method Article
Le TD Drive : un implant paramétrique open-source pour les enregistrements électrophysiologiques multi-zones chez les rats en comportement et endormis
Dans cet article
Résumé
Ici, nous présentons un implant unique, imprimable en 3D, pour les rats, nommé TD Drive, capable d’enregistrements symétriques et bilatéraux de fils-électrodes, actuellement dans jusqu’à dix zones cérébrales distribuées simultanément.
Résumé
Des interactions complexes entre plusieurs zones du cerveau sous-tendent la plupart des fonctions attribuées au cerveau. Le processus d’apprentissage, ainsi que la formation et la consolidation des souvenirs, sont deux exemples qui dépendent fortement de la connectivité fonctionnelle à travers le cerveau. De plus, l’étude des similitudes et/ou des différences hémisphériques va de pair avec ces interactions multi-zones. Les études électrophysiologiques qui tentent d’élucider davantage ces processus complexes dépendent donc de l’enregistrement de l’activité cérébrale à plusieurs endroits simultanément et souvent de manière bilatérale. Voici un implant imprimable en 3D pour rats, nommé TD Drive, capable d’enregistrer symétriquement et bilatéralement des électrodes-fils, actuellement dans jusqu’à dix zones cérébrales distribuées simultanément. La conception open-source a été créée en utilisant des principes de conception paramétriques, permettant aux utilisateurs potentiels d’adapter facilement la conception du variateur à leurs besoins en ajustant simplement des paramètres de haut niveau, tels que les coordonnées antéro-postérieures et médiolatérales des emplacements des électrodes d’enregistrement. La conception de l’implant a été validée chez n = 20 rats Lister Hooded qui ont effectué différentes tâches. L’implant était compatible avec les enregistrements de sommeil attachés et les enregistrements en plein champ (exploration d’objets) ainsi qu’avec l’enregistrement sans fil dans un grand labyrinthe à l’aide de deux systèmes d’enregistrement commerciaux différents et de scènes. Ainsi, la conception et l’assemblage adaptables d’un nouvel implant électrophysiologique sont présentés, facilitant une préparation et une implantation rapides.
Introduction
La nature multi-zones des interactions cérébrales pendant l’éveil et le sommeil rend difficile l’étude exhaustive des processus physiologiques en cours. Alors que des approches telles que l’IRM fonctionnelle (IRMf) et l’échographie fonctionnelle (fUS) permettent d’échantillonner l’activité cérébrale à partir de cerveaux entiers 1,2, elles exploitent le couplage neurovasculaire pour déduire l’activité cérébrale de l’activité hémodynamique, limitant ainsi leur résolution temporelle2. De plus, l’IRMf exige que le sujet de recherche soit placé dans un scanner IRM, interdisant les expériences avec des animaux se déplaçant librement. L’imagerie optique de la dynamique calcique avec l’imagerie monophotonique ou multiphotonique permet d’enregistrer simultanément des centaines de neurones spécifiques au type de cellule3. Cependant, les microscopes montés sur la tête tels que le Miniscope3, qui permettent un comportement en mouvement libre, sont généralement limités à l’imagerie des zones corticales superficielles dans les cerveaux intacts4. Bien que le diamètre de leur champ de vision sur le cortex puisse être de l’ordre de 1 mm, l’encombrement de ces microscopes montés sur la tête peut rendre difficile le ciblage de plusieurs zones, en particulier adjacentes. Par conséquent, pour capturer avec précision la dynamique cérébrale multi-zones pendant l’éveil et le sommeil, l’électrophysiologie extracellulaire, enregistrée avec des électrodes implantées dans les zones cérébrales d’intérêt, est l’une des méthodes de choix en raison de sa haute résolution temporelle et de sa précision spatiale5. De plus, il permet de caractériser la dynamique du sommeil chez l’animal de manière compatible avec les analyses obtenues à partir de l’EEG humain, augmentant ainsi la valeur translationnelle de cette méthode6.
Classiquement, les études enregistrant l’activité cérébrale avec des électrodes extracellulaires ont utilisé des électrodes individuelles ou des faisceaux d’électrodes, tels que les tétrodes7. Des sondes de pointe telles que la sonde Neuropixels8 permettent de cibler plusieurs zones simultanément, étant donné qu’elles sont alignées sur un axe qui permet d’implanter la sonde le long de cet axe sans nuire à l’animal. Cependant, l’enregistrement simultané précis de plusieurs zones spatialement séparées reste difficile, les méthodes existantes étant soit coûteuses, soit chronophages.
Ces dernières années, les méthodes de fabrication additive telles que la stéréolithographie sont devenues largement disponibles. Cela a permis aux chercheurs de développer de nouveaux implants d’électrodes adaptables àleurs exigences expérimentales9, par exemple, un ciblage simplifié et reproductible de plusieurs zones du cerveau. Fréquemment, ces conceptions d’implants sont également partagées avec la communauté universitaire en tant que matériel open source, ce qui permet à d’autres chercheurs de les adapter à leurs propres fins. Le degré d’adaptabilité de certains implants varie à la fois en fonction de la conception de l’implant et de la façon dont il est partagé. La modélisation paramétrique10 est une approche populaire de la conception assistée par ordinateur, dans laquelle différents composants de la conception sont liés par des paramètres interdépendants et un historique de conception défini. La mise en œuvre d’une approche paramétrique pour la conception des implants augmente leur réutilisation et leur adaptabilité10, car la modification des paramètres individuels met automatiquement à jour les conceptions complètes sans qu’il soit nécessaire de remodeler la conception complexe. Une nécessité conséquente est que le design lui-même soit partagé dans un format modifiable qui préserve les relations paramétriques et l’historique du design. Les formats de fichier qui ne représentent que des primitives géométriques, tels que STL ou STEP, rendent irréalisables les modifications paramétriques ultérieures des modèles publiés.
Bien que les hyperdisques de tétrode 11,12,13 permettent d’enregistrer des dizaines de tétrodes, leur assemblage et leur implantation prennent beaucoup de temps, et leur qualité dépend en grande partie des compétences et de l’expérience de chaque chercheur. De plus, ils combinent généralement les tubes guides qui dirigent les électrodes d’enregistrement vers leur emplacement cible en un ou deux faisceaux plus grands, limitant ainsi le nombre et l’étalement des zones pouvant être ciblées efficacement.
D’autres implants14,15 exposent l’ensemble du crâne et permettent de placer librement plusieurs microdisques individuels qui transportent les électrodes d’enregistrement. Bien que le placement de microvariateurs indépendants16 pendant la durée de l’intervention maximise la flexibilité, il augmente le temps de l’opération et peut rendre difficile le ciblage de plusieurs zones adjacentes en raison de l’encombrement des microvariateurs individuels. De plus, bien que les implants soient open source, ils ne sont publiés que sous forme de fichiers STL, ce qui rend la modification difficile.
Un exemple de variateur avec une philosophie paramétrique plus inhérente est le RatHat17. En fournissant un pochoir chirurgical qui couvre toute la surface dorsale du crâne, il permet de cibler avec précision plusieurs cibles cérébrales sans l’utilisation d’un cadre stéréotaxique pendant la chirurgie. Plusieurs variantes d’implants pour canules, optrodes ou tétrodes sont disponibles. Cependant, bien que l’utilisation du disque soit gratuite à des fins académiques, il n’est pas publié en open source, ce qui crée un obstacle pour les chercheurs qui souhaitent évaluer et utiliser l’implant.
Cet article présente le TD Drive (voir Figure 1), un nouvel implant imprimable en 3D pour l’enregistrement d’électrodes extracellulaires chez le rat. Le TD Drive vise à surmonter certains des inconvénients des solutions existantes : il permet de cibler plusieurs zones du cerveau, en miroir sur les deux hémisphères, avec des électrodes indépendantes simultanément. Grâce à sa conception simple, il peut être assemblé en quelques heures à un coût relativement faible par des chercheurs moins expérimentés. Le TD Drive est publié en open-source, dans des formats de fichiers facilement modifiables pour permettre aux chercheurs de l’adapter à leurs besoins spécifiques. L’intégration d’une approche de modélisation 3D paramétrique dès le début du processus de conception du TD Drive permet d’abstraire les paramètres nécessaires à la modification : pour changer les emplacements cibles, les chercheurs peuvent simplement modifier les paramètres représentant leurs coordonnées dorso-ventrales et antéropostérieures, sans avoir besoin de reconcevoir le lecteur eux-mêmes. Les fichiers pour modifier et fabriquer le TD Drive se trouvent à l’adresse https://github.com/3Dneuro/TD_Drive.

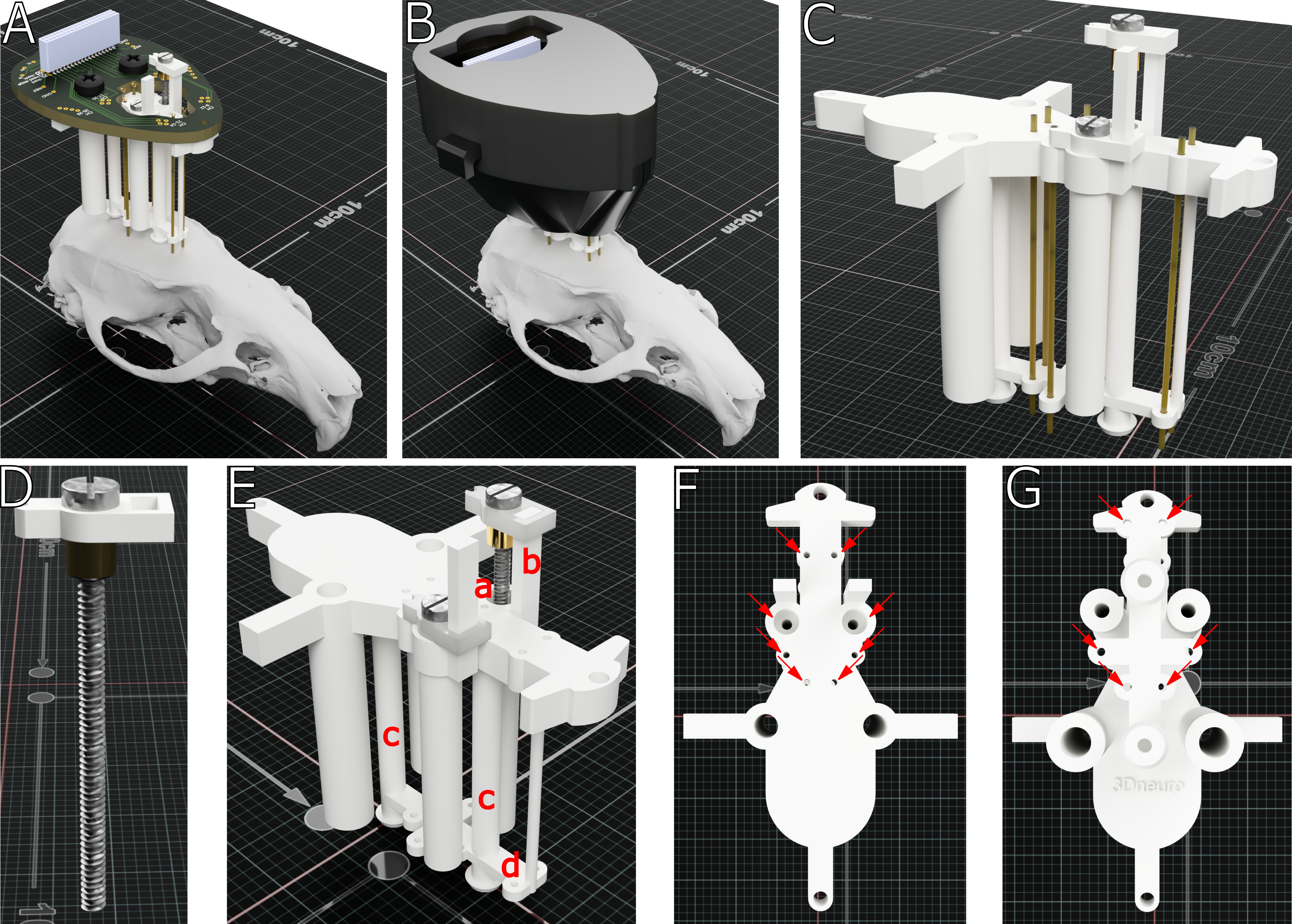
Figure 1 : Vue d’ensemble du TD Drive. (A) Rendu d’un TD Drive avec un capuchon de protection. (B) Rendu avec les parties intérieures illustrées. Le TD Drive dispose (a) de plusieurs emplacements d’enregistrement réglables de manière paramétrique pour les fils d’électrodes fixes et mobiles, d’un EIB avec (b) d’un connecteur Omnetics haute densité compatible avec les systèmes d’acquisition de données filaires et sans fil courants, et (c) d’un mappage de canaux intuitif optimisé pour les enregistrements avec les systèmes Intan/Open Ephys (voir Figure supplémentaire 1) et (d) un capuchon pour protéger l’implant lors des enregistrements attachés et lorsqu’aucun étage n’est connecté. (C) Un pochoir de guidage au bas du TD Drive facilite le placement des canules de guidage et sert de vérification redondante de l’emplacement des implants pendant la chirurgie. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
La conception de l’implant a été testée en n = 4, validée en n = 8 et confirmée chez n = 8 rats Lister Hooded qui ont effectué différentes tâches. Les 4 premiers animaux ont été utilisés pour développer l’entraînement et ajuster les paramètres. Ensuite, un pilote complet a été mené avec 8 animaux (voir les résultats). Une deuxième cohorte de 8 animaux a été analysée et incluse dans l’analyse de survie de l’implant. L’implant était compatible avec les enregistrements de sommeil attachés et les enregistrements en plein champ (Object Exploration) ainsi qu’avec l’enregistrement sans fil dans un grand labyrinthe (HexMaze 9 m x 5 m) à l’aide de deux systèmes d’enregistrement commerciaux différents et de headstages. Les deux cohortes de 8 ont été enregistrées avec deux systèmes d’acquisition différents - connecté pour les enregistrements de sommeil plus longs et sans fil pour les enregistrements d’exploration de grands labyrinthes. Nous pouvons conclure que ce simple entraînement par fil permet de mener des expériences de longue haleine avec des cohortes plus importantes par des chercheurs moins expérimentés pour permettre l’analyse des phases de sommeil ainsi que l’analyse de l’oscillation dans plusieurs zones du cerveau. Cela contraste avec la plupart des implants d’électrophysiologie à ce jour, qui, en raison de la difficulté et de l’intensité du temps, permettent des cohortes d’animaux plus petites et nécessitent généralement des expérimentateurs très expérimentés. Cependant, avec ce moteur, aucune activité neuronale individuelle ne peut être enregistrée ; ainsi, l’utilisation est limitée à l’étude du potentiel de champ local (LFP) et de l’activité de sommation.
Protocole
La présente étude a été approuvée par le Comité central néerlandais Dierproeven (CCD) et menée conformément à la loi sur les expériences sur les animaux (codes de protocole : 2020-0020-006 et 2020-0020-010). Des rats mâles Lister à capuchon de 9 à 12 semaines à l’arrivée ont été utilisés. Les réactifs et l’équipement utilisés dans le protocole sont répertoriés dans la table des matériaux. Reportez-vous à la figure supplémentaire 1 et à la figure supplémentaire 2 pour connaître les étapes du processus de construction du disque.
1. Ajustement et création de modèles 3D et de données de carte d’interface d’électrode (EIB)
- Ouvrez la conception du corps du disque dans Autodesk Fusion. Cliquez sur Modifier les paramètres sous l’onglet Modifier . Ajustez les coordonnées du premier emplacement d’enregistrement en entrant la coordonnée antéropostérieure dans antéroPosteriorSite1 et la coordonnée médiolatérale dans medioLateralSite1. On peut ajuster le diamètre du trou pour le tube de guidage ou les électrodes en ajustant diameterSite1. Répétez l’opération pour les emplacements d’enregistrement 2 et 3, et la conception du modèle sera automatiquement ajustée.
REMARQUE : Les trois emplacements utilisés pour le protocole actuel sont l’hippocampe (HPC), contenant des faisceaux de fils mobiles, et le cortex préfrontal (PFC) et rétrosplénial (RSC), tous deux avec des faisceaux de fils fixes (le faisceau de fils PFC cible à la fois le cortex prélimbique (PRL) et le cortex cingulaire antérieur (ACC)). Le tableau 1 présente les limites imposées manuellement aux paramètres contrôlant les coordonnées médiolatérales des sites d’enregistrement. - Exportez le corps du disque mis à jour en cliquant dessus avec le bouton droit de la souris dans le navigateur et en sélectionnant Enregistrer en tant que maillage. Sélectionnez le type STL (binaire), les unités mm et le raffinement élevé.
- Sélectionnez soit les fichiers STL préparés pour la majuscule standard, soit, si nécessaire (par exemple, lorsque les cibles sont très latérales), les fichiers STL préparés pour les grandes majuscules.
- Selon le plafond choisi, sélectionnez l’EIB ordinaire ou grand pour la production. Les fichiers de production Gerber pour les deux EIB sont fournis sous forme d’archives zip qui peuvent être envoyées directement à un service de fabrication.
2. Impression des modèles 3D et fabrication de la BEI
REMARQUE : Pour la présente étude, une imprimante 3D disponible dans le commerce a été utilisée pour produire les pièces (voir le tableau des matériaux). Lors de l’utilisation d’imprimantes différentes ou de l’externalisation de la production, il peut être nécessaire d’utiliser des résines différentes et comparables pour la production des pièces.
- Imprimez le corps du variateur et les navettes à l’aide de la stéréolithographie9 avec une haute résolution dans une résine ordinaire ou biocompatible (par exemple, une résine transparente, noire ou blanche) avec une hauteur de couche de 25 μm. Imprimez les pièces du capuchon avec une résine solide et robuste (par exemple, Tough 2000).
- Soit fabriquer la BEI en interne, soit la faire produire par un prestataire de services externe. Soudez le connecteur haute densité à l’EIB à l’aide des techniques de soudage SMD (Surface Mounted Device).
REMARQUE : Si vous n’avez pas d’expérience dans la soudure de composants électroniques fins, il est recommandé de faire effectuer la soudure à l’extérieur, par exemple à l’atelier d’électronique de l’université ou chez un fournisseur commercial. Renforcez le connecteur haute densité soudé en appliquant un époxy puissant autour du connecteur. Attention à ne pas couvrir les trous des électrodes avec de l’époxy.
3. Post-traitement du corps imprimé en 3D
REMARQUE : Le capuchon et les navettes ne devraient pas nécessiter de post-traitement. Selon la qualité des impressions 3D, il peut être nécessaire de les poncer légèrement ou d’éliminer les traces de support restantes. Lors du ponçage et du perçage, veillez à ne pas casser les parois du corps d’entraînement. Si nécessaire, nettoyez les pièces post-traitées avec de l’isopropanol et, un chiffon doux et/ou de l’air comprimé.
- Percez les trous pour les tubes de guidage en haut et en bas du corps d’entraînement à l’aide d’un foret de 0,5 mm monté dans un étau à goupille. Cela permet de s’assurer que les dimensions sont correctes et cohérentes sur tous les sites.
- Percez les deux trous de fraisage (comme sur la figure 2E) sur le corps d’entraînement de l’insert en laiton de la navette à l’aide d’un foret de 2 mm dans un étau à goupille.
- Nettoyez les trous de fraisage des débris de forage avec de l’air comprimé. Taraudez ensuite les trous de guidage des vis navettes, qui sont le prolongement des trous de fraisage, avec un taraud M1. Effectuez le taraudage en deux itérations ou plus, en nettoyant les débris du taraud et le trou entre les itérations. En option, lubrifiez le robinet avec une goutte d’huile minérale.
- Nettoyez le corps de l’entraînement des débris de forage et de taraudage avec de l’air comprimé.

Figure 2 : Rendu du TD Drive. (A,B) TD Drive (A) sans et (B) avec un capuchon de protection sur un modèle de crâne de rat. (C) Tubes guides en polyimide correctement insérés dans chacun des six sites d’enregistrement. (D) Un ensemble de navette isolé et complet comprenant la vis de guidage, la navette imprimée en 3D et l’insert en laiton soudé. (E) Carrosserie du moteur TD avec deux navettes insérées. Marqués en rouge : (a) trous de fraisage pour la navette, (b) guide de navette, (c) socles centraux du corps d’entraînement, (d) pochoir de guide. (F,G) Les emplacements importants en haut (F) et en bas (G) du corps du disque qui peuvent nécessiter un post-traitement après l’impression 3D sont indiqués par une flèche rouge chacun. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
4. Assemblages de navettes
- Faites glisser une navette imprimée en 3D sur une vis M1x16. Utilisez un insert en laiton M1 pour maintenir la navette imprimée en 3D en place. La navette doit pouvoir pivoter librement sans se déplacer vers le haut ou vers le bas après la mise en place de l’insert.
ATTENTION : Les étapes suivantes contiennent des risques de brûlure (soudure). Selon le flux de soudure et de soudure utilisé, ils peuvent inclure l’exposition à des irritants respiratoires et au plomb. Portez toujours des lunettes de protection lors de la soudure (car la soudure peut éclater) et suivez les directives appropriées pour une manipulation en toute sécurité des substances potentiellement nocives, y compris une ventilation appropriée de l’espace de travail pour extraire les fumées de soudure. Suivez les réglementations locales et les procédures d’utilisation ou consultez le matériel disponible en ligne18,19. - À l’aide d’une petite quantité de pâte à souder, soudez l’insert en laiton à la vis. Veillez à ne pas surchauffer l’insert et la vis afin de ne pas faire fondre la navette imprimée en 3D. Selon la résine utilisée pour l’impression 3D de la navette, il est difficile d’éviter une petite quantité de fusion (et, par la suite, l’adhérence de la navette à l’insert).
REMARQUE : Lors de l’utilisation de vis en acier inoxydable, un flux de soudure peut être nécessaire. Il est recommandé d’utiliser des vis en laiton ou en acier mécanique, car elles sont plus faciles à souder. - Une fois l’ensemble de navette refroidi, tournez doucement la navette imprimée en 3D plusieurs fois autour de la vis. Si la navette a fusionné avec l’insert pendant le soudage, cela devrait la libérer.
REMARQUE : Assurez-vous que la navette peut tourner librement et qu’elle ne vacille pas. Si c’est le cas, jetez l’ensemble navette et commencez-en un nouveau. Essayez soigneusement de faire pivoter l’insert en laiton. S’il tourne par rapport à la vis, répétez le processus de soudage.
5. Assemblage du variateur
- Coupez les tubes en polyimide disponibles dans le commerce à une longueur d’environ 25 mm, mais au moins suffisamment longs pour s’étendre à travers l’ensemble du corps du lecteur.
- Insérez les tubes de guidage en polyimide dans le corps du lecteur. Chaque tube doit être inséré dans un trou sur le dessus du lecteur et le trou correspondant dans le pochoir de guidage au bas du lecteur (« d » sur la figure 2E). Les tubes doivent être insérés jusqu’à ce qu’ils affleurent le haut du corps du lecteur.
- À l’aide d’une aiguille fine ou d’un cure-dent, appliquez une petite quantité de colle cyanoacrylate liquide sur les trous en haut du corps du lecteur pour fixer les tubes de guidage en place. Appliquez la colle par le bas du corps pour éviter que la colle ne coule dans les tubes de guidage. La colle sera aspirée dans l’espace entre le corps d’entraînement et le tube de guidage par des forces capillaires et reliera ainsi les deux.
- Appliquez une petite quantité de colle cyanoacrylate sur l’interface entre les tubes de guidage et le pochoir de guidage au bas du corps du lecteur. Encore une fois, veillez à ne pas obstruer les tubes de guidage avec de la colle. Laissez sécher la colle pendant quelques minutes.
REMARQUE : La durée exacte nécessaire dépend du matériau d’entraînement et du jeu entre le corps d’entraînement et les tubes de guidage. En général, 5 à 10 minutes devraient suffire. - Retournez le corps du variateur et coupez les tubes de guidage en polyimide par le bas de manière à ce qu’ils dépassent d’environ 1 mm les socles centraux du corps du variateur (« c » dans la figure 2E et figure supplémentaire 2). Dans cette configuration, l’extrémité des tubes guides sera au ras de la surface du cerveau au moment de l’implantation.
REMARQUE : Le lecteur a été développé pour cibler les zones plus profondes du cerveau. Si des zones corticales superficielles sont ciblées, des tubes guides en polyimide plus courts peuvent être nécessaires afin de ne pas endommager la surface du cerveau en cas de gonflement initial du cerveau. - Insérez deux ensembles de navette dans le corps du lecteur. Lorsque vous les vissez dans les trous de guidage taraudés, assurez-vous que les vis sont parallèles aux guides de navette (« b » sur la figure 2E). Utilisez les doigts pour aligner doucement les navettes avec les guides de navette.
- Vissez complètement les navettes dans les trous de fraisage pour vérifier que les inserts en laiton de l’ensemble navette ne se coincent pas dans le corps de l’entraînement ou n’entrent pas en collision avec les tubes de guidage en polyimide. Pour ce protocole, une distance minimale de 16 tours complets est requise. Si ce n’est pas le cas, coupez davantage le tube en polyimide sur le dessus du corps du disque pour créer plus d’espace. Ne serrez pas trop la navette dans le corps du lecteur - cela pourrait détruire les filetages coincés sur le corps du lecteur et la soudure de l’ensemble de navette.
REMARQUE : Si un ensemble de navette se coince, retirez-le complètement et vérifiez si la connexion de soudure s’est desserrée. Dans ce cas, utilisez un nouvel ensemble de navette. Si l’ensemble navette entre en collision avec un tube de guidage, raccourcissez le tube de guidage afin qu’il ne dépasse pas le corps du lecteur. - Vissez l’EIB sur le corps du disque à l’aide de vis polyimide M2.5x5. Appliquez quelques gouttes de colle cyanoacrylate entre le corps du disque et l’EIB. Assurez-vous de ne pas obstruer les trous traversants pour la connexion de l’électrode.
6. Préparation de la housse de protection
- Insérez un écrou M2 en acier inoxydable dans l’extrusion sur la moitié gauche du capuchon et fixez-le avec de la colle cyanoacrylate.
- Si nécessaire, percez le trou à l’avant du capuchon gauche avec un foret M1 dans un étau à goupille. Tapotez le trou à l’avant de la moitié droite du capuchon avec un taraud M1.
7. Préparation des fils-électrodes
- Préparez deux plaques métalliques comme surface pour la création des faisceaux de fils d’électrode. Les plaques servent de surface plane, stable mais mobile sur laquelle l’assemblage, le collage et la coupe du faisceau de fils auront lieu. Fixez du papier de traçage à la première plaque et nouez deux ruban adhésif pour peintres sur la deuxième plaque, avec la surface collante pointant vers le haut.
- Trois des quatre fils des faisceaux HPC seront coupés à un angle de 60 degrés pour créer un décalage dans la direction dorso-ventrale. Cela permettra de placer un fil au-dessus, dans et en dessous de la couche pyramidale de l’hippocampe, respectivement. Pour faciliter la coupe, tracez une ligne claire avec un angle de 60 degrés sur le papier de traçage (ligne de 60 degrés).
- Pour chaque faisceau d’électrodes HPC, coupez 4 morceaux de fil d’électrode d’une longueur de 4,5 cm chacun. Pour chaque faisceau d’électrodes PFC et RSC, coupez 4 morceaux de fil d’électrode d’une longueur de 3,5 cm chacun.
- Prélevez délicatement 4 fils en les touchant du bout du doigt (ils y colleront) et placez-les le plus près possible l’un de l’autre sur le ruban adhésif du peintre. Assurez-vous de ne pas les mettre les uns sur les autres.
- Sous un microscope, utilisez une pince pour placer les fils ensemble le plus près possible. Appliquez une fine couche de colle cyanoacrylate liquide sur les 2 premiers cm du haut du paquet. Pour le bundle HPC, collez > 2 cm et < 3,5 cm du fil. Attendez que la colle sèche.
- Touchez doucement les fils avec une pince sous un microscope. S’ils ne se séparent pas, ils sont collés correctement. Pour vérifier l’intégrité, assurez-vous que la couche de colle brille sous l’éclairage du microscope.
- Une fois complètement sec, retirez le faisceau de fils du ruban et transférez-le sur la plaque avec le papier de traçage. Au microscope, vérifiez que le faisceau de fils ne contient pas d’excès de colle sur le dessus ou sur les côtés, et retirez-le soigneusement avec une lame de scalpel.
- Pour les faisceaux RSC, faites une coupe droite au bas du réseau, perpendiculairement à la direction des fils.
- Pour les faisceaux HPC, placez la matrice sur le papier de traçage de manière à ce qu’elle coupe la ligne de 60 degrés et utilisez la ligne comme guide pour faire une coupe inclinée de 60 degrés par rapport à la direction des fils.
- Ensuite, utilisez une lame de scalpel pour séparer soigneusement le plus court des 4 fils du faisceau. Coupez le fil perpendiculairement à la direction du fil, en le raccourcissant à environ 0,75 mm par rapport au deuxième fil le plus long du faisceau.
- Pour les faisceaux PFC, divisez le bas de la matrice en deux faisceaux à 2 fils. Assurez-vous que les deux fils sont bien collés ensemble. Raccourcissez l’un des faisceaux de 2 fils de 1 mm en le coupant perpendiculairement au sens du fil. Voir la figure supplémentaire 1 (en bas) et la figure supplémentaire 2b pour des images des faisceaux de fils coupés.
8. Préparation du fil de terre et des fils EEG
- Poussez au moins 10 broches SIP/DIP hors d’une barrette de prise SIP/DIP interconnectée au pas de 1,27 mm.
- Coupez 2 morceaux de 6 cm de long pour le fil de terre (GND). Coupez 8 morceaux de 6 cm de long pour le fil EEG. À l’aide d’une lame de scalpel, retirez avec précaution une partie de l’isolant des deux extrémités de tous les fils.
- Placez une vis en acier inoxydable M1x3 dans une troisième main, en laissant autant d’espace que possible accessible sous la tête de vis. Enroulez un côté désisolé d’un fil GND ou EEG autour de la tige de la vis, juste en dessous de la tête de la vis.
- Appliquez une petite quantité de flux de soudure à l’aide d’une petite aiguille ou d’un cure-dent. Soudez le fil à la vis. Assurez-vous de ne pas obstruer accidentellement la fente de la tête de vis.
- Placez une broche SIP/DIP dans la troisième main de manière à ce que le côté femelle soit accessible. Insérez la partie désisolée du côté opposé du fil dans la broche SIP/DIP. Appliquez une petite quantité de flux de soudure et soudez le fil à la broche.
- Retirez l’ensemble vis-fil soudé du support. Cet ensemble sera implanté dans le crâne lors de la chirurgie d’implantation.
- Placez une autre goupille SIP/DIP dans le support, tournée à 180 degrés (c’est-à-dire accessible côté mâle). Appliquez une petite quantité de flux de soudure et soudez un côté désisolé de l’autre fil au côté mâle de la broche.
- Retirez l’ensemble fil-broche soudé du support. Cet ensemble sera ensuite connecté à l’EIB, et l’ensemble fil-fil ainsi que l’ensemble fil-broche seront connectés l’un à l’autre pendant la chirurgie d’implantation à l’aide de leurs deux broches.
- Pour renforcer les connexions soudées, appliquez une petite quantité de colle cyanoacrylate sur la connexion entre les fils et les broches.
- Une fois la colle sèche, vérifiez que les broches SIP/DIP des deux assemblages peuvent être connectées en douceur. Utilisez l’option de vérification de la continuité d’un multimètre pour vérifier qu’il existe une connexion continue entre la vis et l’extrémité du fil désisolé de l’ensemble fil-broche lorsque les deux ensembles sont connectés. En option, codez par couleur chaque jeu de fils avec du vernis à ongles (voir tableau des matériaux) pour simplifier la connexion correcte lors de la chirurgie implantaire.
9. Chargement des faisceaux de fils dans le lecteur
- Fixez le lecteur à un support. Veillez à ne pas appliquer une pression trop forte sur l’EIB ou à n’endommager pas le connecteur haute densité lors de cette étape.
- Une fois que le corps de l’entraînement est dans une position stable, prenez l’un des faisceaux de fils et glissez-le avec précaution dans le tube en polyimide correspondant, soit à la main, soit à l’aide d’une paire de pinces fines. Assurez-vous que le réseau de fils est placé dans le bon sens (par exemple, pour le réseau PFC, les deux fils les plus longs du réseau doivent être orientés vers le milieu de l’appareil) et veillez à ne pas plier le réseau de fils.
- Répétez la dernière étape pour tous les autres faisceaux de câbles.
- À l’aide d’une pince fine, saisissez l’un des fils et pliez-le soigneusement vers le trou dans lequel on veut l’insérer. Une fois inséré, utilisez une goupille dorée pour l’épingler dans le trou de l’EIB. Répétez cette opération pour tous les fils du faisceau et pour tous les paquets.
- Assurez-vous que, pendant cette étape, les fils font une belle boucle au-dessus de l’EIB (de cette façon, il y a encore de la place pour déplacer le faisceau de haut en bas du tube en polyimide afin d’ajuster la longueur au bas du tube) et que le réseau qui dépasse du bas du tube en polyimide ne se plie pas accidentellement. Assurez-vous de noter quel fil de chaque faisceau de fils se connecte à chaque canal de l’EIB. Voir la figure supplémentaire 1 pour plus d’informations sur le mappage des canaux du TD Drive.
REMARQUE : Alternativement, après avoir chargé chaque faisceau de fils (étape 9.2), on peut connecter directement les fils à l’EIB (étape 9.4), puis passer à l’étape 9.2 + 9.4 pour les faisceaux de fils restants. Cela peut varier en fonction des préférences personnelles des expérimentateurs. Voir la figure supplémentaire 2b pour un exemple d’un lecteur TD chargé.
- Assurez-vous que, pendant cette étape, les fils font une belle boucle au-dessus de l’EIB (de cette façon, il y a encore de la place pour déplacer le faisceau de haut en bas du tube en polyimide afin d’ajuster la longueur au bas du tube) et que le réseau qui dépasse du bas du tube en polyimide ne se plie pas accidentellement. Assurez-vous de noter quel fil de chaque faisceau de fils se connecte à chaque canal de l’EIB. Voir la figure supplémentaire 1 pour plus d’informations sur le mappage des canaux du TD Drive.
- Ajustez la longueur des faisceaux de fils pour cibler correctement les emplacements d’enregistrement en poussant ou en tirant doucement les faisceaux de fils vers l’intérieur ou vers l’extérieur du tube de guidage (voir Figure supplémentaire 2d).
REMARQUE : Comme les tubes de guidage sont coupés pour affleurer la surface du cerveau, la distance à laquelle un faisceau de fils s’étend au-delà du tube de guidage correspond à l’emplacement dorso-ventral de la zone cible. Les faisceaux de fils HPC mobiles doivent affleurer le bas du tube de guidage, les faisceaux RSC fixes doivent s’étendre sur 1,5 mm et les faisceaux fixes sur PFC doivent s’étendre sur 3,5 mm au-delà des tubes de guidage. Lorsque vous poussez ou tirez les assemblages de fils, veillez à ne pas retirer des fils individuels de l’EIB par le haut ou à plier le bas du faisceau de fils. - Lorsque les réseaux de fils fixes (RSC et PFC) sont alignés, appliquez une petite quantité de colle époxy forte sur le haut des tubes de guidage, en collant les faisceaux en place. Pendant que l’époxy durcit, assurez-vous que les faisceaux de fils sont toujours correctement alignés en bas.
- Pour fixer les réseaux de fils HPC mobiles, déplacez d’abord la navette à la position la plus élevée requise (dans les expériences décrites dans cet article, au moins 16 tours complets/4 mm au-dessus de la position la plus basse). Ensuite, poussez les faisceaux de fils dans l’ouverture en forme de U de la navette et collez-les en place avec une petite quantité d’une colle époxy forte.
REMARQUE : Assurez-vous que l’époxy ne coule pas le long du faisceau dans le tube en polyimide. Lorsque l’époxy est durci, appliquez une deuxième couche d’époxy au même endroit pour renforcer la connexion et réduire le risque de rupture de la connexion lorsque la navette est déplacée. - Insérez soigneusement l’extrémité ouverte de l’ensemble fil-broche d’un fil GND à travers l’un des trous traversants marqués GND. Fixez-le à l’aide d’une goupille dorée.
REMARQUE : Lors de l’utilisation d’un étage de tête dans lequel les canaux GND et de référence (REF) sont court-circuités, un canal REF peut également être utilisé si cela est plus pratique. - Retirez le lecteur du support ; Veillez à ne pas plier les assemblages de fils. Refixez la partie avant du variateur dans le même support et insérez 4 assemblages de broches de fil EEG dans les trous traversants des canaux EEG (marqués 2, 4, 29, 31) et fixez-les avec une goupille dorée chacun.
- Pour tous les fils GND et EEG, utilisez un multimètre sur le réglage de continuité pour vérifier la connexion continue entre la broche dorée de l’EIB et la broche de l’ensemble fil-broche connecté.
- Stockez le lecteur. Cela peut se faire, par exemple, en fixant le capuchon au corps du disque et en le rangeant à l’envers.
REMARQUE : Avant l’implantation chirurgicale, stérilisez le bas du lecteur avec de l’éthanol. Toutes les vis à os et les assemblages de fils GND/EEG doivent être stérilisés à l’éthanol. Les instruments chirurgicaux doivent être stérilisés via un autoclave.
10. Chirurgie d’implant de lecteur
REMARQUE : Cette étape décrit brièvement les procédures chirurgicales pour l’implantation du TD Drive. Un protocole d’implantation plus complet, y compris une description des outils, ainsi que les doses et les concentrations de médicaments, se trouve dans le dossier supplémentaire 1.
- Stérilisez les outils chirurgicaux et nettoyez et désinfectez la zone chirurgicale en suivant les directives de l’établissement local. Pour stériliser les implants, placez les parties des fils d’électrodes qui seront en contact avec le cerveau dans de l’éthanol pendant au moins une minute.
REMARQUE : Une longue exposition à l’éthanol ou à ses vapeurs peut affaiblir la colle cyanoacrylate. Si les fumées ne sont pas piégées, prolongez le temps d’immersion des fils dans l’éthanol. Afin de vérifier l’intégrité de la colle, il est recommandé de trouver le moment optimal avec un implant de test qui n’est pas utilisé dans une expérience réelle. - Fournir l’analgésie préventive nécessaire, des antibiotiques et une anesthésie gazeuse (isoflurane) conformément aux directives institutionnelles et locales.
- Placez le rat dans l’appareil stéréotaxique. Rasez le haut de la tête et désinfectez la peau avec de la povidone iodée. Appliquez un anesthésique local (lidocaïne) par voie sous-cutanée et faites une petite incision sur le crâne au-dessus de la ligne médiane.
- Exposez le crâne en tirant la peau sur le côté. Retirez le tissu conjonctif sur le dessus du crâne, séchez et nettoyez la surface du crâne. Détachez doucement les muscles sur le côté du crâne pour permettre la mise en place des vis d’ancrage.
- Mesurez les coordonnées bregma et lambda. Pour un ciblage précis, assurez-vous que la surface du crâne est parallèle au plan antéro-postérieur-médiolatéral de la stéréotaxe en mesurant la différence de position dorso-ventrale du bregma et du lambda. Si les coordonnées diffèrent, ajustez la position du rat en stéréotaxe en levant ou en abaissant l’embout buccal.
- Marquez les craniotomies autour des localisations cibles (cortex prélimbique (AP +3,5 mm et ML + -1 mm), rétrosplénial (AP +5,8 mm et ML +-1 mm et hippocampe (AP -3,8 mm et ML + - 2,5 mm)).
- Percez des trous pour les vis GND/EEG et les vis d’ancrage. Insérez les vis et couvrez-les d’acrylique dentaire liquide. Percez les craniotomies et retirez soigneusement la dure-mère. Empêchez les craniotomies de se dessécher en appliquant une solution saline stérile.
- Positionnez soigneusement le TD Drive sur le dessus des craniotomies, en vous assurant que les tubes de guidage affleurent le crâne. Protégez les tubes de guidage avec de la vaseline et fixez le TD Drive au crâne avec de l’acrylique dentaire.
- Abaissez lentement les réseaux de fils ciblant le HPC à partir de leur emplacement initial (~1,5 mm DV de la surface du cerveau) vers la couche pyramidale de l’hippocampe CA1. La couche pyramidale a été atteinte progressivement au cours des jours suivants lors des contrôles des signaux pendant la période de récupération des rats.
- Placez le capuchon de protection autour du lecteur.
- Désactivez l’anesthésie au gaz et retirez le rat du cadre stéréotaxique. Placez le rat dans une cage propre à l’intérieur d’une chambre chauffée et fournissez-lui de la nourriture humide et de l’eau pour la récupération. Surveillez le rat jusqu’à ce qu’il soit à nouveau actif, qu’il se déplace dans la cage, qu’il mange et boive.
- Ramenez le rat dans la salle du logement. Fournir une analgésie et des soins postopératoires selon les directives de l’établissement. Par exemple, voir l’exemple de protocole chirurgical dans le Fichier supplémentaire 1.
11. Relance de la BEI
- À la fin de l’expérience, récupérez le disque et retirez le couvercle de protection.
- Retirez les broches dorées et connectez les fils d’électrode avec précaution. Dévissez l’EIB du corps du lecteur. En poussant doucement une pince à épiler souple entre l’EIB et le corps d’entraînement ou en soulevant délicatement l’EIB à la main, libérez la liaison cyanoacrylate restante qui maintient l’EIB au corps.
- Nettoyez l’EIB et les broches dorées pour les réutiliser sur les implants TD Drive suivants. Avant de réutiliser un EIB, vérifiez que les vias de la broche dorée et le connecteur haute densité ne sont pas usés. N’utilisez l’EIB que si les vias sont suffisamment intacts pour permettre une bonne connexion entre les broches dorées, les fils d’électrode et l’EIB et si la connexion du connecteur haute densité à l’étage supérieur est encore suffisamment stable.
Résultats
En utilisant les instructions fournies dans le protocole, le TD Drive pourrait être construit facilement par plusieurs expérimentateurs. Après le développement de l’entraînement (n = 4), un pilote complet a été mené avec huit animaux. Un lot supplémentaire de huit animaux a été implanté et une collecte de données expérimentales a été effectuée. Comme l’analyse des données sur ces animaux n’a pas été effectuée, ceux-ci ont été inclus dans l’analyse de survie...
Discussion
Cet article présente un implant adaptable pour les enregistrements bilatéraux symétriques multi-électrodes de fil pour les rats se déplaçant librement.
La possibilité d’ajuster facilement l’implant en modifiant des paramètres prédéfinis a été l’une des motivations pour la création du TD Drive. Tout en visant à maximiser la flexibilité pour changer les paramètres, les contraintes inhérentes aux relations entre eux imposent nécessairement...
Déclarations de divulgation
TS et PvH sont des employés de 3Dneuro, Nimègue, Pays-Bas. 3Dneuro a co-développé et produit le TD Drive.
Remerciements
Les auteurs tiennent à remercier Angela Gomez Fonseca pour l’inspiration qui a permis de développer le moteur et tous les étudiants qui ont mené des expériences pilotes avec les animaux, Milan Bogers, Floor van Ravenswoud et Eva Severijnen. Ces travaux ont été soutenus par le Conseil néerlandais de la recherche (NWO ; Programme croisé 17619 « INTENSE »).
matériels
| Name | Company | Catalog Number | Comments |
| 0.5 mm drill bit | McMaster | 2951A38 | |
| 1.27 mm pitch interconnected SIP/DIP socket (Mill-Max) | Mouser Electronic | 575-003101 | For essembling and connection of EEG & GND screws |
| 5 minute epoxy | Bison | Commercially available | regular off-the-shelf epoxy |
| cyanoacrylate glue | Loctite | Super Glue-3 | |
| EEG wire | Science Products GmbH | 7SS-2T | |
| Electrode wire | Science Products GmbH | NC7620F | |
| Ethanol | LC | For standard pre-operative sterilization procedure of drive | |
| Fine forceps (5) | FST | 91150-20 | For wire bundle preperation and handling |
| Form 3B | Formlabs | 3D printer used to 3D print the self-printed parts of the TD drive | |
| Gold pins (small) | Neuralynx, Inc. | 9885 | Attachment of electorde wires to EIB board |
| Ground wire | Science Products GmbH | SS-3T/A | |
| High-density connector | LabMaker GmbH/Omnetics | A79026-001 | |
| Lister Hodded rats | Charles River Laboratories | Crl:LIS | we used male rats, 9-12 weeks of age at arrival |
| M1 brass insert | AliExpress | Commercially available | https://aliexpress.com/item/33047616164.html |
| M1 tap | McMaster | 2504A33 | |
| M1x16 screw | Bossard | 1096613 | |
| M1x3 stainless steel screws | Screws and More | 84213_14985 | |
| M2.5x5 polyimide screws | Screws and more | 7985PA25S_50 | |
| mineral oil | McMaster | 1244K14 | |
| Nail polish | Etos | Commercially available | For color coding EEG and GND wires |
| painter's tape | Gamma | Commercially available | For wire bundle preperation |
| Pin vise | McMaster | 8455A16 | |
| plotting paper | Canson | Commercially available | For wire bundle preperation |
| polyimide tubes | Amazon / Small Parts | TWPT-0159-30-50 | AWG, 0.0159" ID, 0.0219" OD, 0.0030" Wall, 30" Length |
| RHD 32-channel headstage with accelerometer | Intan Technologies, LLC | C3324 | For tethered recordings in the sleepbox |
| RHD 3-ft (0.9 m) standard SPI cables | Intan Technologies, LLC | C3203 | From commutator to headstage |
| RHD 6-ft (1.8 m) standard SPI cables | Intan Technologies, LLC | C3206 | From OpenEphys box to commutator |
| Slip Ring with Flange | Adafruit | 1196 | Commutator: 22 mm diameter, 12 wires |
| Solder flux | Griffon S-39 50 ml | Commercially available | For soldering EEG & GND screws |
| soldering paste | Amazon | B08CBZ5HC5 | |
| stainless steel M2 nut | McMaster | 93935A305 | |
| Tethered recording setup | OpenEphys | Acquasition Board | |
| Wireless recording logger | SpikeGadgets | miniLogger 32 | For wireless recordings in the task |
| Wireless recording setup | SpikeGadgets | Main Control Unit (MCU) incl. breakout board and RF transceiver | For wireless recordings in the task |
Références
- Deffieux, T., Demené, C., Tanter, M. Functional Ultrasound Imaging: A New Imaging Modality for Neuroscience. Neuroscience. 474, 110-121 (2021).
- Finn, E. S., Poldrack, R. A., Shine, J. M. Functional neuroimaging as a catalyst for integrated neuroscience. Nature. 623 (7986), 263-273 (2023).
- Aharoni, D., Federico Guo, C. Aharoni-Lab/Miniscope-v4: Release for generating. GitHub. , (2023).
- Takasaki, K., Abbasi-Asl, R., Waters, J. Superficial bound of the depth limit of two-photon imaging in mouse brain. eNeuro. 7 (1), (2020).
- Buzsáki, G., et al. Tools for probing local circuits: High-density silicon probes combined with optogenetics. Neuron. 86 (1), 92-105 (2015).
- Lacroix, M. M., et al. Improved sleep scoring in mice reveals human-like stages. bioRxi.v. , (2018).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Sci New Ser. 261 (5124), 1055-1058 (1993).
- Jun, J. J., et al. Fully integrated silicon probes for high-density recording of neural activity. Nature. 551 (7679), 232-236 (2017).
- Headley, D. B., DeLucca, M. V., Haufler, D., Paré, D. Incorporating 3D-printing technology in the design of head-caps and electrode drives for recording neurons in multiple brain regions. J Neurophysiol. 113 (7), 2721-2732 (2015).
- Camba, J. D., Contero, M., Company, P. Parametric CAD modeling: An analysis of strategies for design reusability. Comput Aided Des. 74, 18-31 (2016).
- Kloosterman, F., et al. Micro-drive array for chronic in vivo recording: Drive fabrication. J Vis Exp. (26), e1094 (2009).
- Voigts, J., Siegle, J. H., Pritchett, D. L., Moore, C. I. The flexDrive: An ultra-light implant for optical control and highly parallel chronic recording of neuronal ensembles in freely moving mice. Front Syst Neurosci. 7, (2013).
- Voigts, J., Newman, J. P., Wilson, M. A., Harnett, M. T. An easy-to-assemble, robust, and lightweight drive implant for chronic tetrode recordings in freely moving animals. J Neural Eng. 17 (2), 026044 (2020).
- Sheng, T., et al. A novel 3D-printed multi-driven system for large-scale neurophysiological recordings in multiple brain regions. J Neurosci Methods. 361, 109286 (2021).
- Vöröslakos, M., Petersen, P. C., Vöröslakos, B., Buzsáki, G. Metal microdrive and head cap system for silicon probe recovery in freely moving rodent. eLife. 10, e65859 (2021).
- Mishra, A., Marzban, N., Cohen, M. X., Englitz, B. Dynamics of neural microstates in the VTA-striatal-prefrontal loop during novelty exploration in the rat. bioRxiv. , (2020).
- Allen, L. M., et al. RatHat: A self-targeting printable brain implant system. eNeuro. 7 (2), (2020).
- . Soldering Safety Available from: https://safety.eng.cam.ac.uk/safe-working/copy_of_soldering-safety (2018)
- . Harvard Soldering Safety Guidelines Available from: https://www.ehs.harvard.edu/sites/default/files/soldering_safety_guidelines.pdf (2019)
- Samanta, A., et al. CBD lengthens sleep but shortens ripples and leads to intact simple but worse cumulative memory. iScience. 26 (11), 108327 (2023).
- Machado, F., Malpica, N., Borromeo, S. Parametric CAD modeling for open source scientific hardware: Comparing OpenSCAD and FreeCAD Python scripts. PLOS One. 14 (12), e0225795 (2019).
- Schwarz, C., et al. The head-fixed behaving rat: Procedures and pitfalls. Somatosens Mot Res. 27 (4), 131-148 (2010).
- Gardiner, T. W., Toth, L. A. Stereotactic surgery and long-term maintenance of cranial implants in research animals. Contemp Top Lab Anim Sci. 38 (1), 56-63 (1999).
- França, A. S. C., van Hulten, J. A., Cohen, M. X. Low-cost and versatile electrodes for extracellular chronic recordings in rodents. Heliyon. 6 (9), e04867 (2020).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationExplorer plus d’articles
This article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.