
Method Article
マウスの電気生理学的記録のための設計と超軽量重量の作製、調整可能なマルチ電極プローブ
要約
Understanding the neural substrates of behavior requires brain circuit ensemble recording. Because of its genetic tractability, the mouse offers a model for circuit dissection and disease mimicry. Here, a method of designing and fabricating miniaturized probes is described that is suitable for targeting deep brain structure in the mouse.
要約
マウス、 ハツカネズミにおける生理学的研究の数は、マイクロ回路解剖と疾患のモデリングのための標的と遺伝の方法での成長を並列に、最近の急増を経験している。 optogeneticsの導入は、例えば、前例のない時間的解像度で、遺伝的に識別されたニューロンの双方向操作を可能にした。これらのツールを活用し、脳の微細回路間の動的な相互作用への洞察を得るために、それは1つが両方の頭部を固定し、自由に行動する準備で、深いこの小さな齧歯類の脳内のニューロンのアンサンブルから録音する能力を有することが不可欠である。深部構造と明確な細胞層から録音するには、目的の脳領域に向けて電極の正確な発展を可能にする準備が必要です。神経アンサンブルを記録するためには、neighbを残しながら実験者が個別のセルを解決することができ、各電極は独立して移動可能であることが必要である論理和の電極が乱さ。自由に振る舞うマウスの両方を行うには、軽量で弾力性、および特定の脳構造を標的化するための高度にカスタマイズされた電極ドライブが必要です。
ミニチュアを設計し、製造するための技術、超軽量重量、個別にカスタマイズ可能で、容易に商業的に入手可能な部品から組み立てマイクロドライブの電極アレイが提示される。これらのデバイスは、容易に拡張可能であり、標的とされる構造に合わせてカスタマイズすることができます。それは自然な行動の間に自由に行動する動物で視床と皮質領域から記録するために成功裏に使用されてきた。
概要
ハツカネズミはすぐに、遺伝的に特定されたニューロンのマイクロ回路レベルの解剖およびヒト疾患のマウスモデルを調査することに興味生理学者のための選択の動物モデルとなり、その遺伝扱い易さに起因しています。例えば、このような光遺伝学的·化学遺伝アクチュエータなどの因果遺伝子ツールの最近の導入は、実験者が行動1-4で識別された神経回路の必要性と十分性をテストすることができました。組換えトランスジェニックマウスドライバライン(CRE-ライン)の広い利用可能性は、これらの実験5のためのマウスの値に加算し、ニューロンのサブタイプが対象としていることにより、実験的な使いやすさを増幅している。
同様に、遺伝子スクリーニング、共通の神経障害及び精神障害のゲノムワイド関連は、脳の病気6,7についての遺伝的危険因子の特定を容易にした。成長と組み合わせるこれらの進歩、遺伝子操作およびマウスのゲノム工学のためのツールボックスは、それヒト疾患をモデル化するための選択の生物行った。疾患モデルと因果遺伝子ツールの組み合わせは、脳の病気を理解し、介入のための回路レベルの目標を識別するための前例のない機会を提供しています。
完全にこれらの分子ツールを活用し、健康および疾患におけるマイクロ回路機能への洞察を得るためには、脳活動の生理的な読み取り値と結合それらに不可欠です。理想的には、実験者は、単一のセル解像度を維持しながら、ニューロンの大多数を監視することができるであろう。自由に行動する動物における細胞外の、多電極記録は、そのような機会を提供する。しかし、マウスでのこの技術の使用は制限されてきた。小さ な目標( 例えば 、海馬のCA1層)から記録するには、調整可能な電極の使用はsurgic以下の記録電極における小さな動きとして必要であるアル移植は不可能安定性8,9の記録を維持すること。伝統的に、マウスで使用した場合、脳内の電極は、重量制限を課す移動するために使用されている方法は、この生物体における動作とニューロンの大多数のカップル記録することが困難なこと。
ここでは、これらの方法は、個別にoptogenetics互換の、標的とされる脳領域にカスタマイズ可能で小型の、超軽量、微小電極アレイを作製するために導入されており、容易に商業的に入手可能な部品から組み立て。各「マイクロドライブ」多電極内の「ハイパードライブ "は、スクリューからのトルクを打ち消すために、ハイパードライブ本体に内蔵され、電極とプラスチックレールを推進するバネとねじ機構を採用しています。まず、3次元印刷のためのCADプログラムでハイパードライブ体及びマイクロドライブを設計する過程について説明する。カスタマイズされているハイパードライブ本体を設計することにより特定の構造のためには、ターゲティングの精度を高めるために、さらなる製剤の収率を向上させることができる。マルチ電極アレイが市販されている部分から手で組み立てられる第2の製造プロセスは、詳細に記載されている。この技術は、自然採食とオペラントタスクの間に自由に行動する動物における海馬、視床および皮質のニューロンのアンサンブルから記録することに成功し、使用されてきた。
プロトコル
1設計意図
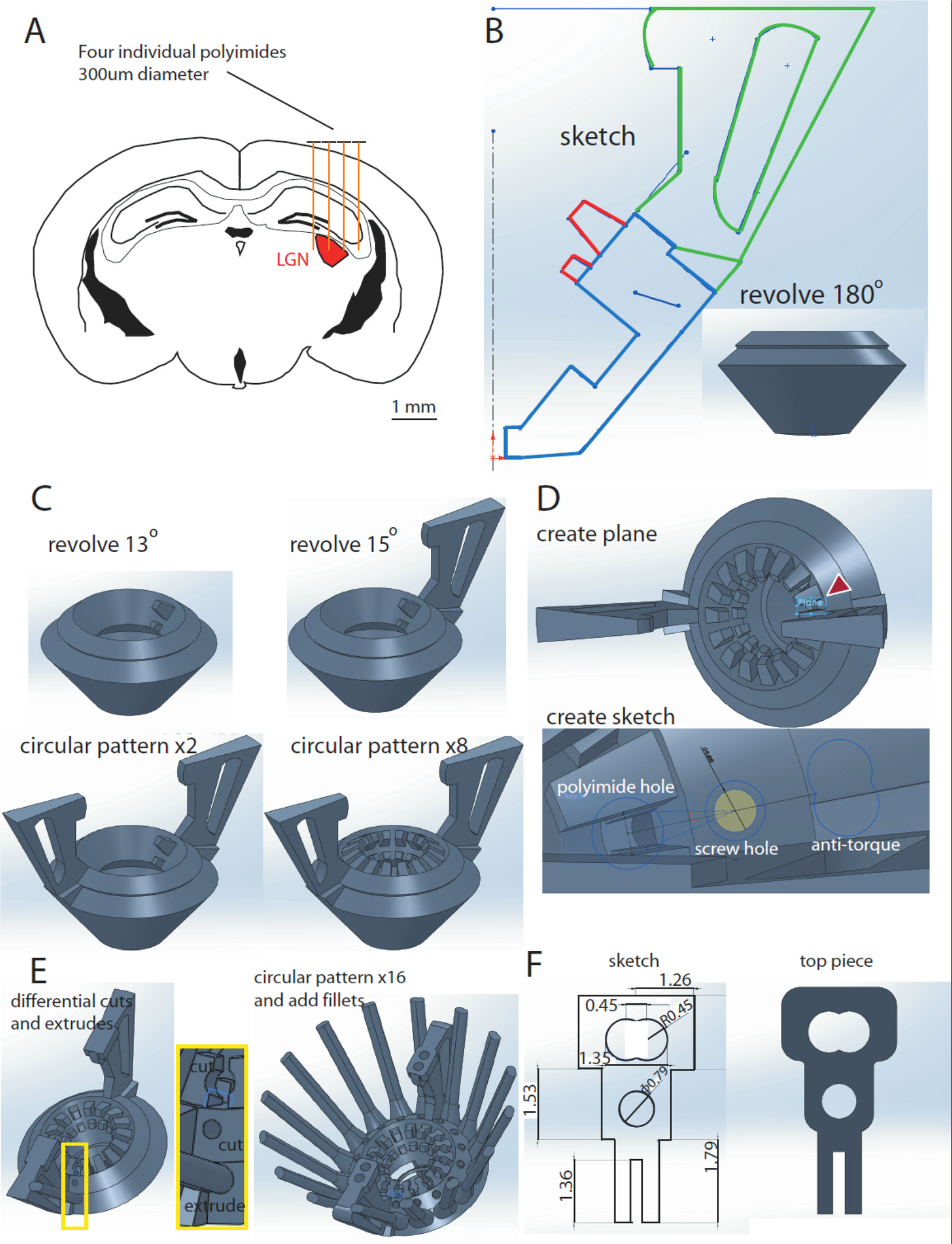
- 電子マウス脳アトラスの矢状切片をスクロールして選択(外側膝状核(LGN、視覚的な視床))の脳領域を特定します。
- A / Pの座標(-2.3 - -2.7 mm)で、LGNが最も広いです。ドライブ·ボトム(底の部分)を設計するために、この領域を使用します。
注:8独立して可動電極の合計がLGNを標的化するために使用することができる(4-6電極は、それがLGNになります2-4電極が移植エラー、 図1Aを相殺するために追加される)。 - SolidWorksで、前面のデザイン体( 図1B)のスケッチを描きます。スケッチをクリックしてから、図に示すように、駆動ベース、ハンドルとポリアミドハーフスロットの輪郭が含まれるスケッチを描くように直線と曲線を組み合わせて使用します。輪郭が開いているギャップが含まれていないことを確認してください。 [終了]スケッチ]をクリックします。
- 次に、前面と右側面の両方を選択し、クリックして "クレアteの枢軸」。そして、ハイライトさ青スケッチ輪郭( 図1B)360°回転させることにより、3D設計ボディモデルを作成。特徴メニューで、「公転ボス/ベース」をクリックしてください。回転軸として正中線を選択してください。パラメータセクションでは、方向1の下でブラインドをクリックし、角度で360.00度を選択します。選択された輪郭セクションで、青い輪郭が選択されるもので強調表示さていることを確認します。
- 赤を回転させて1ポリイミドハーフスロットの作成 は、輪郭13°( 図1C、左上)を強調した。手順アングル仕様時以外は1.4と同じです
- 緑色の輪郭15°( 図1C、右上)を回転させて1ドライブハンドルを作成します。
- 円形パターン機能( 図1C、左下)を使用して第2のドライブハンドルを作成します。特徴メニューで、「円形パターン」をクリックしてください。パラメータでは、回転軸としての正中線を選択します。 1を選択しますインスタンスの数などの角、2として80.00度。最初のハンドルは「パターンの機能」の下で選択されていることを確認。
- 円形パターン機能( 図1C、左下)を使用して、16ポリイミドハーフスロットを作成します。 1.7と同様の動作を実行しますが、「パターンの機能」として第1のポリイミドハーフスロットを選択します。角度は22.5°であり、インスタンスの数は(注:これは、パターン機能をする回数で割っただけで360度である)16である
- ポリイミドレセプタクルを描く上で新しい平面を作成します。メインメニューの「挿入」をクリックしてこれを達成する。ポリイミドハーフスロットの両側を選択し、「参照ジオメトリ」をクリックして、「新しい平面の作成」をクリックします。 ( 図1D、上)
- マイクロドライブレセプタクル(ネジ穴、ポリイミド穴と反トルクレール( 図1D、ボトム)を作成します。作成することによってこれを達成1.9で作成した新しい平面上にこれらすべての機能を包含したスケッチ。すなわち、反トルクレールのため、ポリアミド上部スロットの両側の間に中心線を定義してください。そして、その中心である1離れて半径中心線に垂直な二つの円を作成してから、中央の輪郭をトリミングすることによって反トルクレールを描く。
- [Features(機能)]メニューでは、反トルクレールを作成するために「押し出しボス/ベース」をクリックし、上向きに行く10ミリメートルと下方向に行く2mmのブラインド押し出しを選択します。ネジ穴とポリイミド穴については、「押し出しカット」をクリックし、ブラインド6ミリメートルを選択し、いくつかのMMSは( 図1E、左)の両方に上向きに行く。
- 柄のマイクロドライブレセプタクル16倍速、回転軸としての中心を使用して(22.5°、16事例、等間隔)、(右図1E)
- ハンドルの上部には、中央Aが直面している、ドライブハンドルの中央先端から始まる3ミリメートル×3mmのボックスを描画XIS。上向きに「押し出しボス」機能を使用してこの2ミリメートルを押し出す。 EIBネジが上に行くであろう場所に直径1mmの円を描きます。その後、穴を作るために1.5ミリメートル "押し出しカット"を作る。その後、パターン二回円形パターン機能(テキストオーバーレイ:180°、2つのインスタンス、等間隔、中心軸の周り)を使用して、箱とホール。
- トップピーススケッチを描くために、図1Fに(単位:mm)の寸法を使用してください。その3Dモデルを作るために「押し出しボス/ベース」を使用してください。
注:これらのステップの後、ドライブの設計が完了した。物理ドライブ本体は光造形のプロセスを経て作成されます。 STLファイルに基づいて、ステレオリソグラフィー印刷を提供する企業が多数あります。私たちは、少なくとも0.1mmの最小分解能で、(例えばAccura®55など)硬質プラスチックで印刷できるサービスをお勧めします。
ハイパードライブコンポーネントの調製
- 小さなレイアウトし平らな面に両面テープ片と約8センチメートル31のGポリイミドチューブの必要な数を削減(ID /外径:0.0071 '' / 0116 '';ウォール:0.00225)( 図2A - 2B) 。
- テープ上に互いにできるだけ近くガイドチューブを配置するように注意しながら、両面テープのガイド管の第1の層をレイアウトする。ポリイミド系樹脂層上に薄い、シアノアクリレート接着剤の少量を軽くたたく。 ( 図2C)
- すぐにポリイミドの第二の層( 図2D)をレイアウトします。
- 26のGカニューレを使用し、光ファイバのプレースホルダを作成します。これは、アセンブリ( 図2E)に組み込まれる前にテフロン系潤滑を使用して潤滑されていることを確認します。
- ポリイミドバンドル( 図2F)に垂直な長さのエポキシ4〜5ミリメートルの行を適用します。エポキシが硬化したら、(2-3時間)、底層とペイジからテープを取り除く反対側をプロポキシ。エポキシが再び硬化した後、26 Gカニューレを除去し、構築物は、一ハイパードライブ( 図2H)のために使用することができるそれぞれが2枚のポリイミドマトリックス、その結果、カミソリの刃( 図2G)を使用して、途中で切断することができる。
- 透明紙にコーンテンプレートをプリントアウトし、ヘビーデューティーアルミ箔( 図3A - 3C)の対応するシートをカット。
- アルミ箔にエポキシの層を適用し、迅速に透明の紙を適用します。重い物や木製ダボを使用して、それが均等に分散されるように( 図3D)は、エポキシを滑らかに。
- コーンテンプレートを切り出し、ワニ口クリップを使用して一緒にクランプする。最後に、恒久的に個( 図3E)を固定するエポキシの別のDABを使用しています。
マイクロドライブの3。最終アセンブリ
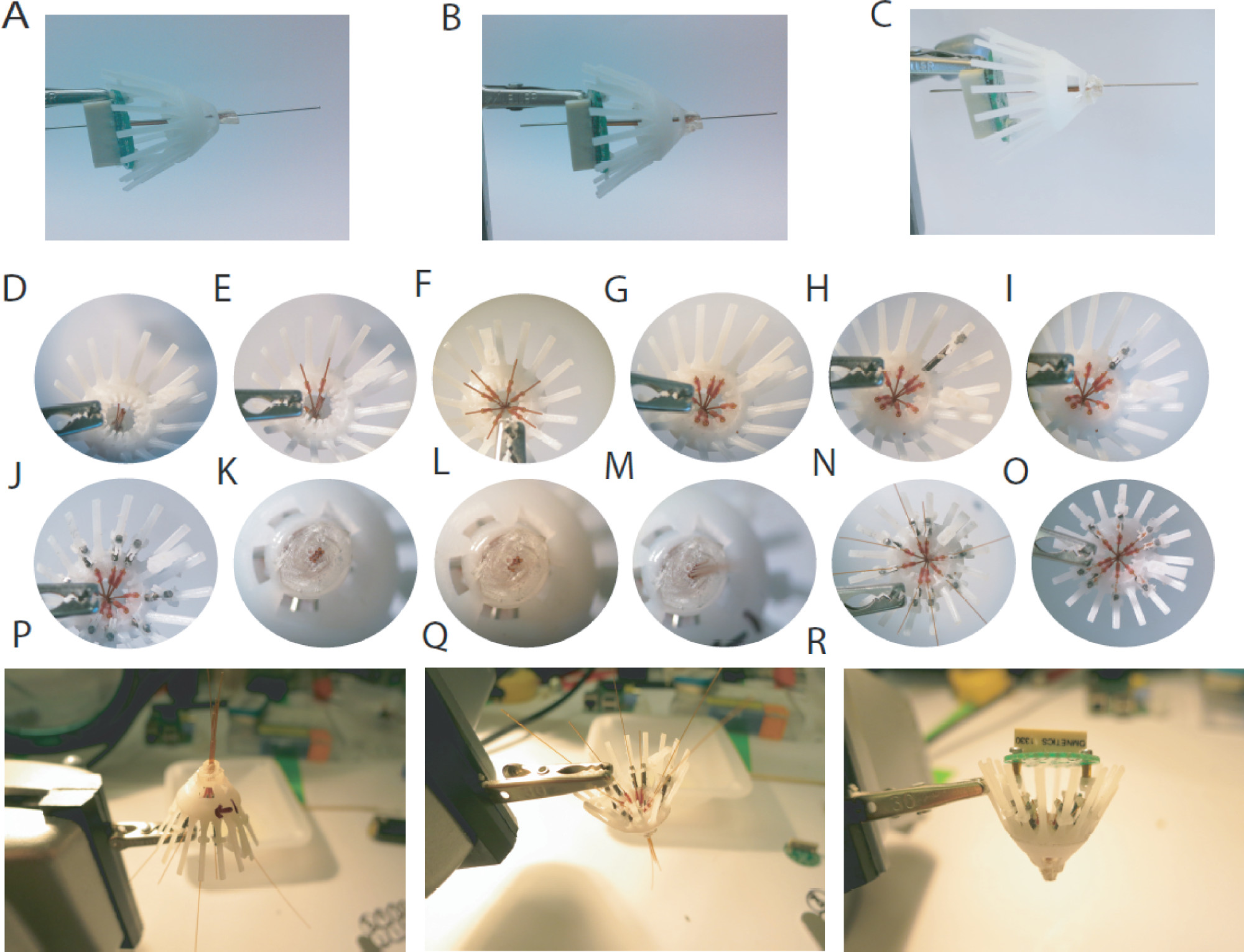
- ドライブ本体にEIBを取り付け、ポリイミドガイドチューブマトリックスを通っ26 Gカニューレを挿入します。案内管は、EIBに垂直であり、全くエポキシがガイドチューブ内に、または流れないことを保証するように注意しながら駆動体にマトリックスをエポキシことを保証するためにEIB光ファイバー穴を使用して、駆動体とポリイミドマトリックスを揃える駆動体( 図4A - 4C)。
- 駆動体の内壁上の対応するブラケットにポリイミドマトリックス中の各ガイドチューブの地図。各ガイドチューブの上、ブラケットへの33のGポリイミドの小さなリングをスライドさせ、それぞれのガイドチューブを固定するシアノアクリレート接着剤の少量を適用します。 ( 図4D - 4E)最後に、駆動体の内壁に装置全体をエポキシ、彼らは単に内側リップ( 図4F - 4G)の上方に突出するようにポリイミドを切った。
- カスタム-Bのいずれかを入れてマイクロドライブアセンブリを構築5ミリメートルばねの1に続いてトップピースの中心孔を通してuiltネジ。レールのうちの1つの上にトップピースの外側の穴をスライドさせ、静かにネジをドライブ。春は、最小圧縮長です達するまで、ネジをドライブ。 ( 図4H - 4I)各レール/マイクロドライブ( 図4J)のためにこのプロセスを繰り返します。
- 逆さまにドライブアレイの電源を入れ、ガイドチューブ行列の写真を撮る。この写真は、各マイクロドライブ( 図4K)に対応するガイドチューブの位置をマッピングするために使用される。
- ドライブベースの底から各ガイドチューブにポリイミドチューブ(0.005 ')を挿入する。キャリア管は、写真に対応するマイクロドライブのIDに完全に下がっマイクロドライブ、レコードの先頭から1〜2ミリメートルを拡張してみましょう。 ( 図4L - 4M)
- 、マイクロドライブのサポートにポリイミドチューブをエポキシルにないように注意してトンエポキシはバネやネジ( - 4Q図4N、4P)上にマイクロドライブを介して実行。
- 完全にすべてのマイクロドライブを下げる。ポリイミドマトリックス( 図40)の下部にフラッシュオフすべてのポリイミドチューブをカット。
- 2#00から90のx 3/16 'ネジ( 図4R)を用いた駆動ベースに電極インタフェースボードをマウントします。
注:この時点で、ドライブアレイはstereotrodesまたはtetrodesをロードする準備ができました。四極建設とロードの詳細については、10を参照してください。印刷された駆動ベースとマイクロドライブは、SolidWorks 2011の3D CADソフトウェアで設計されています:リンクをSolidWorksファイルをダウンロードする。 - ロード後、ドライブを反転し、慎重にのみ底部片が突出するように、ドライブの上にシールドコーンを下げる。ドライブ本体にコーンをepoxyingによってシールドコーンを貼付。
- コーンが装着された後の小さな長さを取り除くEIBへのステンレス鋼線(0.008 'コーテッド」ベア、0.011' ')とピン。針でコーンの内側のアルミ部分をスクラッチし、銀ペイントを使ってコーンに鋼線を接地してください。銀塗料が乾燥した後、エポキシのDABで補強する。別の方法として、鋼線を直接、導電性エポキシ(MGケミカル、サリー、カナダ)のDABでコーンに結合させることができる。
結果
インプラントの構造によっては、底部片( 図2)の構築、シールドコーン( 図3)、およびハイパードライブの最終組立に進む、ハイパードライブ( 図1)は、3Dの設計で始まるプロセス印刷されているマイクロドライブの個別の建設( 図4)。これらのステップは、(10を参照)電極を用いてマイクロドライブをロードすることによって続いている。このステップに続いて、複数の脳領域から記録するため、これらのデバイスを使用することが可能である。 図5では、例が示されている外側膝状核(LGN)と海馬(HPC)の同時記録からトレースします。 図5Bに示された単一ユニットの安定性は、数日間にわたって一貫性のある波形を示し、顕著であった。で示されるように、これらのニューロンは、発光ダイオードの刺激に応答することによってLGNニューロンであることが確認された図5Cのperistimulus時間ヒストグラム(PSTH)。この同じ準備では、HPC局所電場電位は、行動状態のプロキシとして記録した。これらのトレースは、その海馬起源と一致した行動の静穏時の鋭い波波紋( 図5D)を示した。

SolidWorksでハイパードライブの設計図1。ブレグマから-2.7ミリ- A / Pでのマウス脳の冠状断面のA.回路図-2.3を調整します。 4つの個別のポリイミド(300μm)を、電極とLGN域(赤)のターゲティングを示す、皮質の上に描かれています。デザイン本体のB.スケッチ。 3Dデザインのボディ·モデル(挿入図)での180°の結果は青い輪郭をリボルビング。ポリイミドスロットとドライブのC.添加は、設計本 体に処理します。赤いhighlリボルビングポリイミドのハーフスロットに13°の結果(左上)で、Bにおける輪郭をighted。一つのドライブハンドルは15°(右上)により、Bの緑色の輪郭を回転させて追加されます。第2のハンドルは、円形パターン関数(左下)を使用して追加される。同じ機能は、16ポリイミドハーフスロット(右下)。D. A新しい平面ねじ孔から成るマイクロドライブレセプタクルのための新しいスケッチを作成することができ、設計(上)に追加され、ポリイミドを生成するために使用することができ穴と反トルクレール(下)。E.これらの機能は、カットと押し出しの機能を使用して、設計に実装され、16の容器を作成するために360°を公転します。トップピーススケッチ(左)と3DモデルのF·寸法(右)。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
図2は、第1のポリイミドチューブを両面テープ上に配置されるハイパードライブの底部片。A.準備。B.後続の管は管の間の空間を最小限に抑えるように注意しながら、個別に配置されている。C.第1の層がレイアウトされた後、シアノアクリレート接着剤の薄層D.ポリイミドの第二の層が印加される接着剤が乾燥する前に速やかに添加される。E.は、ポリイミド束の上に、26 Gカニューレは、光ファイバー用のプレースホルダとして添加される。F全体コンストラクトが確実にエポキシの滴で固定されている。G.カニューレを除去した後、構築物は、二つの同一の下片を得、カミソリの刃で中央で切断することができる。H.ビュー完成の切断面に4ポリイミドの2重の行を示す底部片、と光ファイバ用の穴が。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}

図3ハイパードライブの組み立て。A.ポリイミドマトリックス26 Gカニューレを用いて駆動体に挿入され、電子インターフェースボード(EIB)と整列している。エポキシを少量にポリイミドマトリックスを固定するために使用されるB. A駆動体。C. Aはエポキシの第2の適用が必要になる場合がありますが、その後、過剰のエポキシが挿入マトリックスとドライブ本体にDのトップビューを離れてdremeledする必要があります。E. 33のGポリイミドチューブの小片を使って、外ガイドチューブは、駆動体の対応するスロットに取り付けられている。F. すべての外側ガイドチューブは、チューブの張力を最小限に抑えるように注意しながら、レールにマッピングする必要があります。すべての外側ガイドチューブがマッピングされた後、G、彼らはエポキシで固定するだけ内側リップの上にカットされるべきである。H.マイクロドライブ特注のネジ、5ミリメートルスプリングとトップピースからなるアセンブリは、組み立てられ、案内管のいずれかに対応するレールの上に配置する必要があります。I.各マイクロドライブアセンブリは慎重にドライブ本体にねじ込まれるべきである。J.組立後、各案内管は、対応するマイクロドライブが必要ポリイミドマトリックスのK.底面図をL - M。ポリイミドチューブ(0.005 ")各外側ガイドチューブに挿入される。N.各内側ガイド管は、そのフォークにぴったりと収まる必要があり、対応するマイクロドライブだ。O.内側のポリイミドチューブが、対応するマイクロドライブにエポキシで取り付けられ、可能な限り短くカット。すべての内側ガイドチューブがエポキシ樹脂で接着した後、ポリイミドマトリックスから突出インナーガイドチューブは、行列リップと面一にカットする必要があります。ドライブのP.倒立マクロビューをインナーガイドチューブロード中に、ドライブのQ.トップマクロビューをインナーガイドチューブロード中にEIBと。R.完全完成ハイパードライブ添付、電極を用いてロードされる準備ができて。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}

。図4シールドコーンの準備A.コーンテンプレートは、透明紙に印刷されたBが - Dを 。アルミホイルのシートは、エポキシの薄い層を使用してテンプレートに接着されている。E. < /強い>は、テンプレートを切断した後、コーンが形成され、エポキシで一緒に接着。

超軽量·重量ハイパードライブ。Aを用いて、図5のマルチサイト·レコーディング 。注入されたハイパードライブで自由に振る舞うマウスのイメージ。2つのユニットのBには、例えば、このマウスからの録音を波形℃で左、電極の一部が低下した外側膝状核を強調し、マウス脳の冠状断面。右、の例では、視覚刺激(黄色のバー)に並ぶ2つのLGNニューロンの時間ヒストグラム(PSTHs)をperistimulus。D.右、電極の別のセットが低下した海馬(HPC)を、ハイライト冠状断面。右、海馬リップル(赤ハイライト)の局所電場ポテンシャル記録の例。

駆動部品の図6の概要(左)ハイパードライブコンポーネントの包括的な概要。個別のマイクロドライブアセンブリのNa(右)イラスト。
ディスカッション
このプロトコルは、マウスに、単一または複数の脳領域を標的化するための超軽量マイクロドライブアレイを構築するプロセスの概要を説明します。構築の最終段階の後、ハイパードライブは、標準的な外科的移植技術を用いて移植し、歯科用セメントでマウスの頭蓋骨に固定することができる状態にある。マウスを手で拘束されながら、移植後は、電極は、それぞれ独立して、小型のドライバーを使用して進めることができる。各電極が進み、ターンあたりの距離は、ねじのピッチによって決定されます。ハーフとクォーターターンより高い解像度のために使用され得るが、ここで参照されたネジを使用することで、ターンごとに、各電極に約150ミリメートルを進める。
図1Bにおけるスケッチの寸法は、インプラントの全体的なサイズを決定するため、双方向にインプラントを拡張する明白な方法は、重要なスケッチ上の寸法を変更することである。さらに、目ネジの電子の長さは、より深い脳構造を標的化するために拡張することができる。これらは、光と鋼よりも少ない脆いよう私たちは、カスタムメイドのチタンのネジをお勧めします。反トルクレールは、ネジの長さに伴って直線的に拡張する必要があり、この時点で私たちはこれらの構造を印刷することが可能な最大の長さを決定していないことに注意してください。複数の脳領域を標的とするように、底部片の形状を変更することができる。既知のサイズのワッシャー(厚さ200μm)を添加すると、個別の脳構造(例えば、海馬および前頭前野)を標的とするポリイミドの間に必要なスペーサーを提供することができます。これらは、底片組立工程に含まれており、エポキシが硬化した後、後に遮断する可能性があります。
この設計の大きな限界は、プロプライエタリなソフトウェア(この場合SolidWorksの)への依存である。最小限のエンジニアリングとそのような機器の設計に資するユーザーフレンドリーなインタフェースを提供するオープンソースプログラムの今後の展開バックグラウンド·ラウンドは神経科学のコミュニティに多大な利益となるだろう。
この方法は、既存の方法に対していくつかの利点を提供する。まず、デザインは、シンプルな非常に少数のスケッチ( 図1)に依存している。第二に、そのアセンブリに行くことなく歯科用セメントや重い材料を必要としない、超軽量です。似たような機能の市販のインプラントの重量のほぼ3分の1 - 全体的には、周囲に1.7グラムの重量を量る。第三に、それができるようにする全く特殊な装置を必要としない - インプラント本体は、(例えばapproto.comのために、しかし、いくつかの他のものがあります)、複数のソースから印刷3Dすることができます。ネジは、カスタム(例えばantrinonline.comのために)行うことができます。ばねは、(例えば、leesprings.com用)市販されており;その結果、全体の組立工程は、一日に起こり得る。最後に、これらのインプラントは、天然の採餌中に複数の脳領域から記録するために使用されてきた、構造化された行動タスクおよび睡眠( 図5)。
この方法の将来のアプリケーションは、そのスケーラビリティを実装する含まれています。これは、インプラントが双方向に)1を変更するだけで、図1(b)のスケッチとパターン化されたマイクロドライブレセプタクル( 図1D)の、2)数のサイズを拡大縮小することができる可能性がある。例えば、開発の初期段階で自由に振る舞うマウスからのレコードに下向きにスケーリングされ、ラット、ウサギ、フェレット、おそらくヒト以外の霊長類から記録するように上向きにスケーリングすることができる。
最後の言葉は、概説された方法の実装を成功させる重要なそれらが結合してデザインファイルを.STLするために実装変更をプロトタイプすることを読者に思い出させることです。読者は添付のデザインは、「8の字」反トルクレールが含まれていること、例えば、気づくでしょう。これは、それが、多くの場合、私たちはこれらの穴を開けていることが要求されるように、3Dプリントの制限与えられた最高のデザインが可能であった。それは円で持つことは、COMPうromise安定性が、それは正方形で持つ又は傾斜形状は、掘削により3Dプリントの欠陥を修正する能力を制限する。
開示事項
著者らは、開示することは何もない。
謝辞
We thank members of the Wilson lab for their helpful advice on the fabrication method.
This work was supported by the Simons Foundation, a NIH pathway to independence career award from the NINDS and a NARSAD Young Investigator Award (to M.M.H.) as well as grants from the NIH (to M.A.W.).
資料
| Name | Company | Catalog Number | Comments |
| Microdrive screws | Antrin | Half Circle 0.6 UNM Titanium Screws. 8 mm thread. 9 mm length from under head. | |
| Tap-ease | AGS CO. | #TA2 | Tapping Grease |
| Microdrives | See .STL file | ||
| Drive Body | See .STL file | ||
| Outer Polyimide Guide Tube | Minvasive Components | IWG Item # 72113300022-012 | Length: 12’’, ID: 0.0071’’, OD: 0.0116’’, WALL: 0.00225’’ |
| Inner Polyimide Guide Tube | Minvasive Components | IWG Item # 72113900001-012 | Length: 12’’, ID: 0.0035’’, OD: 0.0055’’, WALL: 0.001’’ |
| Grounding Wire | A-M Systems, Inc. | Catalog # 791900 | 0.008'' Bare, 0.011'' Coated |
| Tri-Flow | Teflon based lubricant - Aerosol | ||
| Microdrive Springs | Lee Spring | Part # CB0050B 07 E | Outside Diameter: 1.016 mm, Hole Diameter: 1.193 mm, Wire Diameter: 0.127 mm, Free Length: 10.160 mm, Solid Length: 3.581 mm |
| Z-poxy 5 Minute | Pacer Technology (Zap) | PT37 | |
| Silver Paint | GC Electronics | Part #: 22-023 | Silver Print II |
| Tri-Flow | 20009 | ||
| 26 G Hypodermic Tube - Stainless Steel | Small Parts | HTXX-26T-12-10 | Length: 12’’, ID: 0.012’’, OD: 0.018’’ |
| EIB screws | Component Supply Co. | MX-0090-03SP | #00-90 x 3/16’’ |
| Fine Scissors - Toughcut | Fine Science Tools | 14058-09 | 22 mm |
| Transparency Paper | 3M | PP2500 | |
| Aluminum Foil | Reynold's Wrap Heavy Duty | Extra Thick |
参考文献
- Boyden, E. S., Zhang, F., Bamberg, E., Nagel, G., Deisseroth, K. Millisecond-timescale, genetically targeted optical control of neural activity. Nat Neurosci. 8, 1263-1268 (2005).
- Fenno, L., Yizhar, O., Deisseroth, K. The development and application of optogenetics. Annu Rev Neurosci. 34, 389-412 (2011).
- Alexander, G. M., et al. Remote control of neuronal activity in transgenic mice expressing evolved G protein-coupled receptors. Neuron. 63, 27-39 (2009).
- Halassa, M. M., et al. Selective optical drive of thalamic reticular nucleus generates thalamic bursts and cortical spindles. Nat Neurosci. 14, 1118-1120 (2011).
- Tsien, J. Z., et al. Subregion- and cell type-restricted gene knockout in mouse brain. Cell. 87, 1317-1326 (1996).
- Nestler, E. J., Hyman, S. E. Animal models of neuropsychiatric disorders. Nat Neurosci. 13, 1161-1169 (2010).
- Collins, P. Y., et al. Grand challenges in global mental health. Nature. 475, 27-30 (2011).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Science. 261, 1055-1058 (1993).
- Wilson, M. A., McNaughton, B. L. Reactivation of hippocampal ensemble memories during sleep. Science. 265, 676-679 (1994).
- Nguyen, D. P., et al. Micro-drive array for chronic in vivo recording: tetrode assembly. J Vis Exp. (26), (2009).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved