
Method Article
Design und Fertigung von Ultraleichtgewicht, verstellbare Multi-Elektroden-Sonden für elektrophysiologischen Ableitungen in Mäuse
* Diese Autoren haben gleichermaßen beigetragen
In diesem Artikel
Zusammenfassung
Understanding the neural substrates of behavior requires brain circuit ensemble recording. Because of its genetic tractability, the mouse offers a model for circuit dissection and disease mimicry. Here, a method of designing and fabricating miniaturized probes is described that is suitable for targeting deep brain structure in the mouse.
Zusammenfassung
Die Zahl der physiologische Untersuchungen in der Maus, Mus musculus, hat eine jüngste Anstieg erlebt, parallel zum Wachstum der Methoden der genetischen Targeting für Mikroschaltung Dissektion und Krankheit Modellierung. Die Einführung der Optogenetik, hat beispielsweise zur bidirektionalen Manipulation genetisch identifiziert Neuronen erlaubt, mit einer beispiellosen zeitlichen Auflösung. Um diese Tools zu nutzen und einen Einblick in dynamischen Wechselwirkungen zwischen Gehirnmikroschaltungen, ist es wichtig, dass man die Fähigkeit hat, aus Ensembles von Nervenzellen tief im Gehirn des kleinen Nager aufnehmen, in beiden Kopf-festen und frei verhalten Zubereitungen. Um von Tiefenstrukturen und unterschiedliche Zellschichten aufnehmen erfordert eine präzise Vorbereitung, die Weiterentwicklung von Elektroden auf Wunsch Hirnregionen ermöglicht. Neuronale Ensembles aufzuzeichnen, ist es erforderlich, dass jede Elektrode unabhängig voneinander beweglich sein, so dass der Experimentator, einzelne Zellen zu lösen, während NEIGHBoring Elektroden ungestört. Sowohl in einer frei verhalten Maus tun erfordert eine Elektrodenplatte, die leicht, robust und sehr individuell für bestimmte Zielhirnstrukturen ist.
Eine Technik, die für die Gestaltung und Herstellung von Miniatur-, Ultraleicht-Gewicht, Microdrive Elektrodenarrays, die individuell anpassbar und leicht aus handelsüblichen Teilen zusammengesetzt sind vorgestellt. Diese Geräte sind leicht skalierbar und kann auf die Struktur, die gezielt angepasst werden; es wurde erfolgreich verwendet, um von Thalamus und kortikale Regionen in einem frei verhalten Tier während natürliche Verhalten aufzuzeichnen.
Einleitung
Mus musculus hat, aufgrund seiner genetischen Lenkbarkeit, schnell das Tiermodell der Wahl für Physiologen interessiert Mikroschaltung-Level-Dissektion der genetisch identifiziert Neuronen und bei der Untersuchung von Mausmodellen menschlicher Erkrankungen zu werden. Zum Beispiel hat die kürzliche Einführung der kausalen genetischen Werkzeugen, wie optogenetische und chemische genetische Aktoren erlaubt Experimentatoren, die Notwendigkeit und Angemessenheit der festgestellten neuronalen Schaltkreise im Verhalten 1-4 zu testen. Die breite Verfügbarkeit von rekombinanten transgenen Maustreiber Leitungen (Cre-Linien), hat die experimentelle Leichtigkeit, mit der Neuron-Subtypen gezielt verstärkt werden, indem auf den Wert der Maus für diese Experimente 5.
Ebenso haben genetische Screens und genomweiten Verbände der häufigsten neurologischen und psychiatrischen Erkrankungen die Identifizierung genetischer Risikofaktoren für die Erkrankung des Gehirns 6,7 erleichtert. Diese Fortschritte, verbunden mit der wachsendenWerkzeugkasten für die genetische Manipulation und Genomtechnik bei Mäusen, haben es der Organismus der Wahl für die Modellierung menschlichen Krankheit gemacht. Die Kombination von Krankheitsmodellen und kausalen genetischen Werkzeuge bietet eine beispiellose Gelegenheit für das Verständnis des Gehirns Krankheit und Identifizierungsschaltung-Level-Ziele für Interventionen.
Um vollständig zu kapitalisieren dieser molekularen Werkzeuge und einen Einblick in Mikroschaltfunktion in Gesundheit und Krankheit, ist es wichtig zu koppeln sie mit physiologischen Anzeigen der Hirnaktivität. Idealerweise ist der Experimentator in der Lage wäre, eine große Anzahl von Neuronen zu überwachen, während die Einzelzellauflösung. Extrazellulären, Multi-Elektroden-Aufnahmen in frei lebenden Tier bieten solche Gelegenheit; Die Verwendung dieser Technologie in der Maus war begrenzt. Von kleinen Zielen (zB CA1-Schicht im Hippocampus) aufzuzeichnen, notwendig, kleine Bewegungen in der Aufzeichnungselektroden folgenden Surgic ist die Verwendung von einstellbaren Elektrodenal Implantation unmöglich machen Aufnahmestabilität 8,9 zu halten. Traditionell sind die Methoden, die verwendet wurden, um zu bewegen Elektroden im Gehirn auferlegen Gewichtsbeschränkungen, wenn in der Maus verwendet wird, was es schwierig macht zu koppeln Aufnahme einer großen Zahl von Neuronen mit dem Verhalten in diesem Organismus.
Hier werden Verfahren zur Herstellung von Miniatur-, ultraleichten, Mikroarrays, die individuell anpassbar an die Hirnregion, die gezielt Optogenetik-kompatibel sind, eingeführt und leicht aus handelsüblichen Teilen zusammengesetzt. Jeder "Microdrive" im Multi-Elektroden-"Hyperdrive" verwendet eine Feder-Schraubenmechanismus, um die Elektrode und eine Kunststoffschiene voran, in den Hyperantrieb Körper gebaut, um das Drehmoment von der Schraube entgegenwirken. Erstens, der Prozess der Gestaltung der Hyperantrieb Körper und Microdrives in einem CAD-Programm für den 3D-Druck beschrieben. Durch die Gestaltung Hyperantrieb Körper, die angepasst werdenfür bestimmte Strukturen ist es möglich, die Genauigkeit der Ausrichtung zu erhöhen und die Ausbeute der Herstellung zu erhöhen. Zweitens wird das Herstellungsverfahren im Detail, wobei das Mehrelektrodenanordnung wird von Hand aus Teilen, die im Handel erhältlich sind gebaut beschrieben. Diese Technik wurde verwendet, erfolgreich, um von Ensembles von Neuronen im Hippocampus, Thalamus und Cortex im frei verhalten Tier während natürliche Nahrungssuche und oper Aufgaben aufnehmen.
Protokoll
1. Design Intent
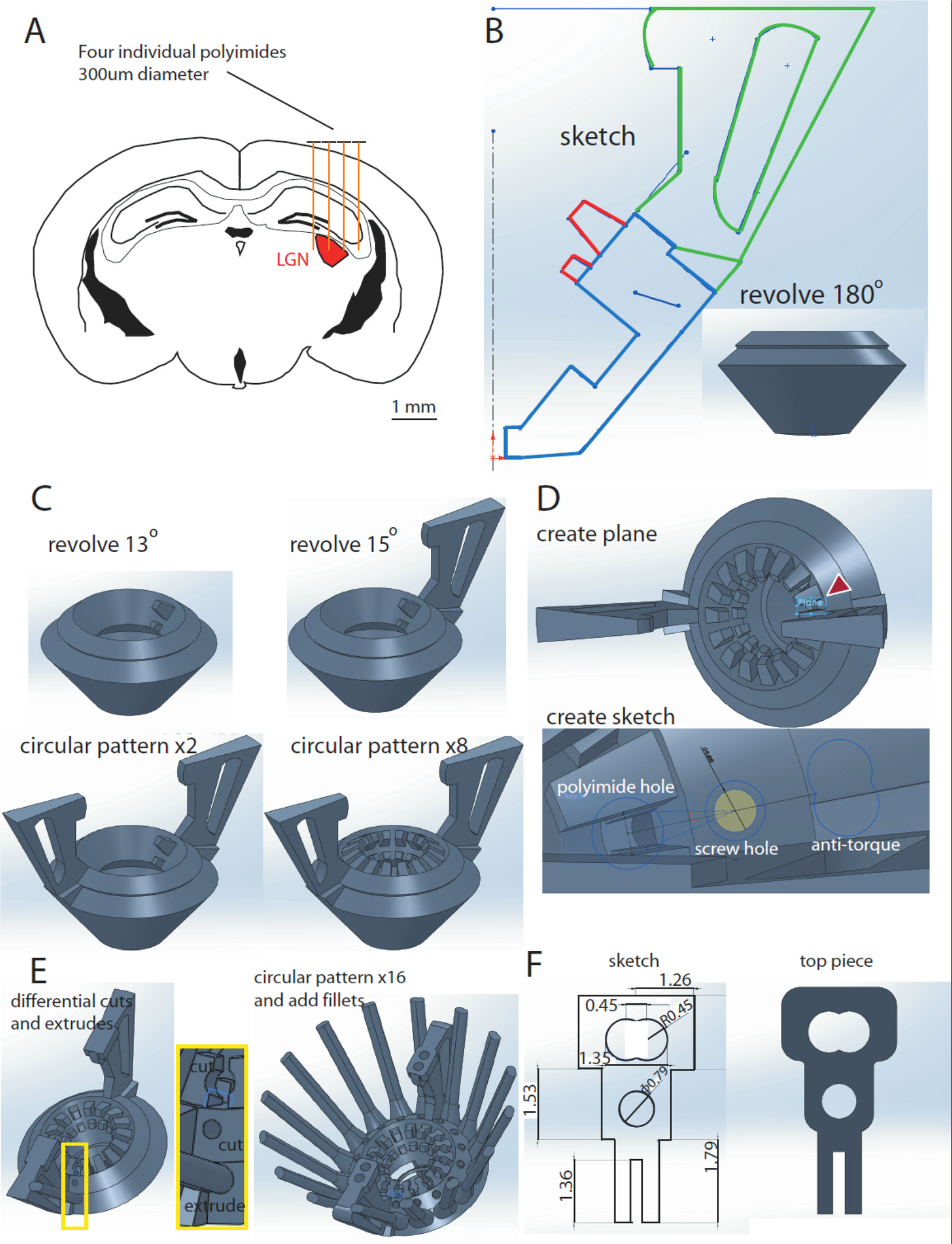
- Identifizieren Sie die Hirnregion der Wahl (seitliche Kniehöcker (LGN, visuellen Thalamus)), indem Sie durch den Sagittalschnitten der elektronischen Maus-Gehirn-Atlas.
- Bei A / P-Koordinaten (-2,3 - -2.7 mm), ist die LGN breitesten. Verwenden Sie diesen Bereich, um das Laufwerk unten (Unterteil) zu entwerfen.
ANMERKUNG: Eine Gesamtzahl von 8 unabhängig beweglichen Elektroden können zum LGN abzuzielen (4-6 Elektroden an die LGN zu machen, werden 2-4 Elektroden hinzugefügt Implantationsfehler 1A Offset). - In Solidworks, zeichnen Sie eine Skizze des Design-Körper (Abbildung 1B) in der vorderen Ebene. Klicken Sie auf Skizze, und verwenden Sie dann Kombination von Linien und Kurven, um eine Skizze, die enthalten wird, die Konturen für die Antriebsbasis, Griffe und Polyamid Hälfte Schlitze wie gezeigt zu ziehen. Stellen Sie sicher, dass die Kontur nicht alle geöffneten Lücken enthalten. Dann klicken Sie auf Beenden Skizze.
- Als nächstes wählen Sie sowohl die Vorder-und rechten Flugzeuge, und klicken Sie auf "Create Achse ". Erstellen Sie dann die 3D-Konstruktion Körpermodell durch Drehen der Skizze blau markiert Kontur (Abbildung 1B) 360 °. In der Eigenschaften-Menü auf "Gedrehter Boss / Base". Wählen Sie die Mittellinie als Drehachse. Im Abschnitt Parameter, unter der Leitung 1 auf Blinde und unter Winkel auszuwählen 360.00 deg. Im gewählten Konturen Schnitt gewährleisten, dass die blau hervorgehoben Kontur ist der ausgewählte.
- Erstellen Sie eine Polyimid-Halbschlitz durch Drehen der rot hervorgehoben Konturen 13 ° (Abbildung 1c, oben links). Schritte sind zu 1,4 identisch mit der Ausnahme, für die Winkelangabe
- Erstellen Sie ein Laufwerk behandelt durch Drehen der grüne Kontur 15 ° (Abbildung 1c, rechts oben).
- Erstellen Sie die zweite Antriebshandgriff mit der kreisförmigen Muster Funktion (1C, unten links). In der Eigenschaften-Menü, klicken Sie auf "Circular Pattern". In Parameter, wählen Sie die Mittellinie als Drehachse. Wählen Sie 180.00 ° als der Winkel, und 2, wenn die Anzahl der Instanzen. Stellen Sie sicher, dass der erste Griff ist unter "Features für Muster" gewählt.
- Erstellen sechzehn Polyimid Halbschlitze mit dem kreisförmigen Muster Funktion (1C, unten links). Führen ähnliche Bewegungen auf 1,7, aber wählen Sie den ersten Polyimid Half-Slot als die "Features für Muster". Der Winkel beträgt 22,5 ° und die Anzahl der Instanzen sind 16 (Hinweis: Dies ist nur 360 ° geteilt durch die Anzahl der Zeiten, die Sie wollen die Funktion Muster)
- Erstellen Sie eine neue Ebene, auf der die Polyimid-Behälter zu ziehen. Erreichen dies, indem Sie auf "Einfügen" im Hauptmenü. Klicken Sie auf "Referenzgeometrie", wählen Sie die beiden Seiten der Polyimid-Halbautomaten, und klicken Sie dann auf "Create New Plane"; (1D, oben)
- Erstellen Sie das Microdrive Aufnahme (das Schraubenloch, Polyimide Loch und Anti-Drehmoment Schiene (1D, unten). Erreichen dies durch die Schaffungeine Skizze, die all diese Funktionen auf der neuen Ebene in 1,9 erstellt umfasst. Beachten Sie, dass für die Anti-Drehmoment Schienen, definieren Sie eine Mittellinie zwischen den beiden Seiten der Polyamid Spitzenplätze. Dann ziehen die Anti-Drehmoment Schienen durch die Schaffung von zwei Kreise senkrecht zur Mittellinie, deren Zentren 1 Radius auseinander, und dann den Zuschnitt der Mitte Kontur.
- Im Menü Extras, klicken Sie auf "Extrude Boss / Base", um die Gegendrehschiene zu erstellen, und wählen Sie einen blinden extrudieren von 10 mm nach oben gehen und 2 mm nach unten gehen. Für das Schraubenloch und Polyimid Loch, klicken Sie auf "Extrudieren cut", und wählen Sie blinde 6mm, und ein paar mm nach oben gehen für beide (1E, links).
- Muster der Mikroantriebsaufnahme 16x, mit dem Zentrum als der Drehachse (22,5 °, 16 Instanzen, gleicher Abstand), (1E, rechts)
- Auf der Oberseite des Griffs, ziehe eine 3 mm x 3 mm Feld ab der Mitte Spitze der Antriebshandgriff, mit Blick auf die Zentralexis. Extrudieren diese 2 mm nach oben mit der Funktion "Extrude Boss". Zeichnen Sie Kreise von 1 mm Durchmesser an den Orten, in denen die EIB Schrauben wird weitergehen. Danach machen 1,5 mm "Extrude Cut", um ein Loch zu machen. Dann Muster der Box und Loch zweimal mit dem Kreismuster-Funktion (Text-Overlay: 180 °, 2 Fällen gleichen Abstand, um die Mittelachse).
- Verwenden Sie die Abmessungen (in mm) in 1F, ein Spitzenstück Skizze zu zeichnen. Verwenden Sie die "Extrude Boss / Base", ein 3D-Modell zu machen.
HINWEIS: Nach diesen Schritten komplette Antriebskonzept ist. Das physische Laufwerk Körper durch das Verfahren der Stereolithographie erzeugt. Es gibt eine Reihe von Unternehmen, die Stereolithographie Druck auf der Basis von STL-Dateien anbieten. Wir empfehlen Dienstleistungen, die in Hartplastik drucken können (wie Accura® 55), mit einer Mindestauflösung von mindestens 0,1 mm.
2. Herstellung der Hyperdrive-Komponenten
- Legen Sie eine kleine(: '. / 0116 "ID / OD 0,0071' '; Wall: 0,00225) Stück doppelseitiges Klebeband auf eine flache Oberfläche und schneiden Sie die erforderliche Anzahl von 31 g Polyimid Rohre auf etwa 8 Zentimeter (2A - 2B) .
- Layout der ersten Schicht von Führungsrohren an der doppelseitigen Klebeband, wobei darauf zu Führungsrohre so dicht wie möglich zueinander auf dem Band zu platzieren. Dab eine kleine Menge von dünnen, Sekundenkleber über der Schicht aus Polyimide. (2C)
- Schnell lag eine zweite Schicht Polyimide (2D).
- Erstellen Sie eine Lichtwellenleiter-Platzhalter mit einer 26 G Kanüle. Sicherzustellen, dass dies unter Verwendung eines Teflon basierenden Schmiermittels, bevor sie in die Anordnung (2E) aufgenommen geschmiert.
- Tragen Sie eine Linie von Epoxid 4-5 mm in der Länge senkrecht zu der Polyimid-Bündel (2F). Sobald das Epoxidharz hat (2-3 Stunden) gehärtet, entfernen Sie das Klebeband von der unteren Schicht und reePOxy der anderen Seite. Nachdem das Epoxidharz ausgehärtet ist wiederum kann das 26 G Kanüle entfernt und das Konstrukt mit einer Rasierklinge (2G), so dass sich zwei Polyimid-Matrizen, von denen jede für einen Hyper (2H) verwendet werden, in der Mitte geschnitten.
- Drucken Sie die Vorlage Kegel auf einem Blatt Papier und schneiden Transparenz eine entsprechende Blatt schwere Aluminiumfolie (3A - 3C).
- Tragen Sie eine Schicht Epoxidharz auf die Aluminiumfolie und die Transparenz Papier schnell anwenden. Mit einem schweren Gegenstand oder einem Holzstab, glätten die Epoxid, so daß sie gleichmäßig verteilt ist (3D).
- Schneiden Sie die Vorlage und Kegel zusammenklemmen mit einer Krokodilklemme. Schließlich verwenden Sie einen anderen Klecks Epoxy, um die Stücke (3E) dauerhaft anzubringen.
3. Endmontage des Microdrive
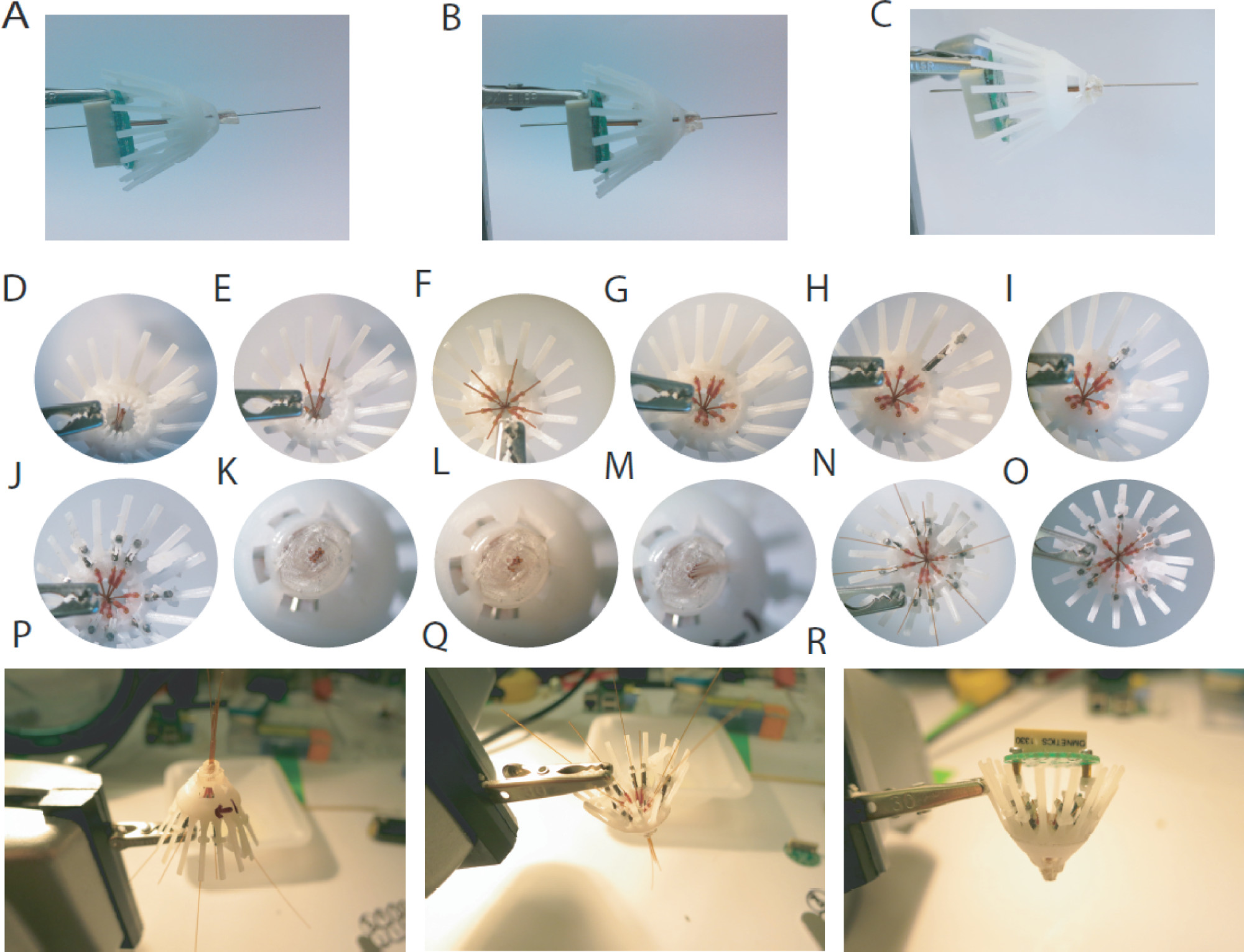
- Befestigen Sie die EIB mit dem Antriebskörper, Und setzen Sie die 26 G Kanüle durch die Polyimid-Führungsrohr Matrix. Richten Sie die Polyimid-Matrix mit der Antriebskörper mit dem LWL-Loch in der EIB, um sicherzustellen, daß die Führungsrohre senkrecht an die EIB und Epoxy-Matrix zu der Antriebskörper wobei darauf zu achten, dass kein Epoxy in den Führungsrohren oder in der fließt Antriebskörper (4A - 4C).
- Karte jedes Führungsrohr in der Polyimid-Matrix mit einer entsprechenden Halterung an der Innenwand des Antriebskörpers. Schieben Sie einen kleinen Ring von 33 g Polyimid über jede Führungsrohr und in die Halterung und eine kleine Menge von Sekundenkleber, um jede Führungsrohr befestigen. (Figuren 4D - 4E) Schließlich Epoxid der gesamten Vorrichtung an der Innenwand des Antriebskörpers und schneiden die Polyimide, so dass sie genau über der inneren Lippe (4F - 4G) ragen.
- Bauen Sie ein Microdrive Montage, indem Sie eine der benutzerdefinierten-built Schrauben durch das Mittelloch des oberen Teils, gefolgt von einer der Federn 5 mm. Schieben Sie die äußere Loch des Oberteils über eine der Schienen, und sanft fahren die Schraube an. Fahren Sie die Schraube, bis die Feder erreicht es Mindestdrucklänge. (Abbildungen 4H - 4i) Wiederholen Sie diesen Vorgang für jede Schiene / Microdrive (4J).
- Schalten Sie das Laufwerk-Array auf den Kopf und nehmen Sie ein Bild von dem Führungsrohr Matrix. Dieses Bild wird verwendet, um die Position der Führungsröhre, die jedem Microdrive (Abbildung 4K) abzubilden.
- Legen Sie eine Polyimid-Rohr (0,005 ") in jedes Führungsrohr aus dem Boden der Antriebsbasis. Lassen Sie das Trägerrohr verlängern 1-2 mm von der Spitze des vollständig abgesenkt Microdrive und Aufzeichnung auf dem Foto die Identität des entsprechenden Mikro-Laufwerk. (Abbildungen 4L - 4 M)
- Epoxidharz Die Polyimid-Rohr auf die Microdrive-Unterstützung, dabei nicht zu let Epoxid durch die Microdrive auf die Feder oder Schraube (- 4Q Zahlen 4N, 4P) laufen.
- Voll unteren alle Microdrives. Schneiden alle Polyimid-Röhrchen bündig an der Unterseite des Polyimid-Matrix (Abbildung 4A).
- Montieren Sie die Elektrodenschnittstellenkarte an den Antriebsbasis mit zwei # 00-90 x 16.3 "" Schrauben (Bild 4R).
HINWEIS: An dieser Stelle ist das Laufwerk-Array bereit, mit stereotrodes oder Tetroden geladen werden. Einzelheiten zur Tetrode Bau und Laden finden Sie 10. Die gedruckte Antriebsbasis und die Microdrives wurden in Solidworks konstruiert 2011 3D-CAD-Software: Link zum Download Solidworks-Dateien. - Nach der Beladung invertieren die Antriebs und vorsichtig absenken Abschirmkegel über die Antriebs so dass nur das Unterteil hineinragt. Befestigen Sie das Abschirmkegel von epoxying den Kegel mit dem Antriebskörper.
- Nach der Konus befestigt ist, Streifen eine kleine LängeEdelstahldraht (.008 '' Bare, .011 '' Coated) und Pin an die EIB. Kratzer auf der inneren, Aluminium Teil des Kegels mit einer Nadel und erden Sie die Stahldraht auf den Konus mit Silberfarbe. Sobald die Farbe getrocknet ist Silber, verstärken mit einem Klecks Epoxy. Alternativ kann der Stahldraht direkt auf den Kegel mit einem Klecks leitendes Epoxid (MG Chemicals, Surrey, Kanada) befestigt werden.
Ergebnisse
Implantatkonstruktion ist ein Prozess, der mit der Konstruktion der gedruckten 3D Hyper (Figur 1) beginnt, ausgehend auf die Konstruktion des Unterteils (2), die Schirmkegel (3) und die Endmontage des Hyper durch einzelnen Bau der Microdrives (Abbildung 4). Diese Schritte werden durch das Laden der Microdrives mit Elektroden (siehe 10) gefolgt. Nach diesem Schritt ist es möglich, diese Geräte zu benutzen, um aus verschiedenen Hirnregionen zu erfassen. In Figur 5 zeichnet beispielsweise von einem gleichzeitigen Aufnahme des Corpus geniculatum laterale (LGN) und Hippocampus (HPC) gezeigt. Die Stabilität der einzelnen in 5B gezeigten Einheiten ist bemerkenswert, zeigt konsistente Wellenformen über einen Zeitraum von mehreren Tagen. Diese Neuronen wurde bestätigt, daß Neuronen von anspricht auf Leuchtdioden Stimulation LGN werden, wie durch die gezeigteperistimulus Zeit-Histogramm (PSTH) in 5C. In der gleichen Vorbereitung wurde HPC lokale Feldpotential als Proxy für Verhaltenszustand erfasst. Diese Spuren zeigten sharp wave ripples (5D), während Verhaltens Ruhe im Einklang mit ihrer Hippocampus Herkunft.

Abbildung 1. Entwerfen der Hyperantrieb in Solidworks. A. Schematische Darstellung eines Frontalschnitt einer Maus Gehirn bei A / P-Koordinaten -2.3 - -2.7 mm von Bregma. Vier Einzel Polyimide (300 um) sind über dem Kortex gezogen, die die Ausrichtung der Region LGN (rot) mit Elektroden. B. Skizze des Design-Körper. Drehen der blaue Kontur 180 ° führt zu einem 3D-Design-Körpermodell (kleines Bild). C. Die Zugabe von Polyimid-Steckplätze und Laufgriffe auf das Design Körper. Drehen des roten highlighted Konturen in B um 13 ° zu einer Polyimid-Halbschlitz (oben links). Ein Antrieb Handgriff durch Drehen der grüne Kontur in B durch (oben rechts) 15 ° aufgenommen. Der zweite Handgriff unter Verwendung der kreisförmigen Musterfunktion (links unten) zugegeben. Die gleiche Funktion kann verwendet werden, um die 16 Polyimid Hälfte Schlitze (unten rechts). D. Eine neue Ebene wird auf das Design (oben) aufgenommen, so dass eine neue Skizze für das Microdrive Behälter, der das Schraubenloch besteht zu erstellen, Polyimide erstellen Loch und Gegendrehschiene (unten). E. Diese Merkmale werden in die Gestaltung mit den Schnitt und extrudieren Funktionen implementiert werden, und drehte sich um 360 ° zu 16 Aufnahmen erstellen. F. Abmessungen des oberen Teils Skizze (links) und dem 3D-Modell (rechts ). Bitte klicken Sie hier, um eine größere Version dieser Figur zu sehen.
{kind=link}

Abbildung 2. Vorbereitung der Unterteil der Hyperantrieb. A. Die erste Polyimidrohr auf doppelseitiges Klebeband angebracht. B. Weiteres Tubes sind einzeln platziert, wobei darauf zu Raum zwischen den Rohren zu minimieren. C. Nachdem die erste Schicht wird ausgelegt eine dünne Schicht von Cyanoacrylat-Klebstoff aufgetragen D. Eine zweite Schicht von Polyimiden wird schnell zugegeben, bevor der Klebstoff getrocknet wird. E. Auf der Oberseite der Polyimide Bündel wird eine 26 G-Kanüle als Platzhalter für die optische Faser aufgenommen. F . Das gesamte Konstrukt ist fest mit einem Tropfen Epoxidharz auf der Schnittfläche eines fertigen befestigt. G. Nach der Entfernung der Kanüle kann das Konstrukt in der Mitte mit einer Rasierklinge geschnitten, wodurch zwei identische Unterteile. H. anzeigen Bodenstück, welches die zwei Doppelreihen von vier Polyimideund das Loch für den Lichtwellenleiter. Bitte klicken Sie hier, um eine größere Version dieser Figur zu sehen.
{kind=link}

Abbildung 3. Zusammenbau des Hyper. A. Das Polyimid-Matrix wird unter Verwendung der 26 G Kanüle in den Antriebskörper eingesetzt und mit der elektronischen Schnittstellenkarte (EIB) ausgerichtet ist. B. eine kleine Menge Epoxid wird verwendet, um die Polyimid-Matrix zu fixieren der Antriebskörper. C. Eine zweite Anwendung von Epoxy kann notwendig sein, nach der überschüssige Epoxidharz sollte weg D. Draufsicht auf den Antriebskörper mit der Matrix eingesetzt dremeled werden. E. Mit einem kleinen Stück von 33 g Polyimid-Schlauch, der äußere Führungsrohre in die entsprechenden Schlitze der Antriebskörper angebracht. F. Alle äußeren Führungsrohre sollten mit einer Schiene abgebildet werden, kümmert sich um die Spannung auf den Rohren zu minimieren. G. Nachdem alle äußeren Führungsrohre abgebildet, sollten sie mit Epoxy gesichert und knapp über der Innenlippe geschnitten werden. H. Microdrive Montage, bestehend aus einer speziell angefertigten Schraube, 5 mm Feder und einem Oberteil sollte montiert werden und über eine Schiene, die einer der Führungsrohre gelegt. I. Jede Microdrive Montage sollte vorsichtig in den Antriebskörper eingeschraubt werden. J. Nach der Montage sollte jede Führungsrohr eine entsprechende Microdrive K. Unterseite der Polyimid-Matrix L -.. M. Polyimid-Rohre (0,005 ") werden in jeder äußeren Führungsrohr eingelegt. N. Jede innere Führungsrohr sollte eng in die Gabel passt der es entsprechende Microdrive. O. Die inneren Polyimid Rohre mit Epoxy auf die entsprechende Microdrive angeschlossen undschneiden so kurz wie möglich. Nachdem alle inneren Führungsrohre sind geklebt, die inneren Führungsrohre aus dem Polyimid-Matrix hervorstehenden sollte bündig mit der Matrix Lippe während der innere Führungsrohr Lade geschnitten werden. P. Inverted Makro-Ansicht des Laufwerks. Q. Top Makro-Ansicht der Antriebs während inneren Führungsrohr Belastung. R. Komplett montiert Hyperantrieb mit der EIB angebracht, bereit, mit Elektroden geladen werden. Bitte klicken Sie hier, um eine größere Version dieser Figur zu sehen.
{kind=link}

. Abbildung 4. Vorbereitung der Abschirmkegel A. Kegel Vorlage auf Transparenz Papier gedruckt. B - D. Eine Aluminiumfolie wird an der Vorlage mit einer dünnen Schicht aus Epoxidharz verklebt. E. < / Strong> Nach dem Ausschneiden der Schablone, der Kegel gebildet und zusammen mit Epoxidharz verklebt.

Abbildung 5. Multi-Site-Aufnahmen über den Ultraleicht-Gewicht Hyperantrieb. A. Bild von einem frei verhalten Maus mit implantiert. Hyperantrieb B. Beispiele für zwei Einzeleinheit Wellenformen Aufnahmen von dieser Maus. C. Links, Frontalschnitt des Gehirns der Maus Hervorhebung der seitlichen Kniehöcker, wo einige der Elektroden gesenkt wurden. Rechts, peristimulus Beispiel Histogramme (PSTHs) von zwei LGN Neurone auf visuelle Stimulation (gelber Balken) ausgerichtet ist. D. Rechts, Frontalschnitt Hervorhebung der Hippocampus (HPC), wo ein anderer Satz von Elektroden wurden gesenkt. Rechts, Beispiel für lokale Feldpotential Aufnahme einer Hippocampus-Welligkeit (rot markiert).

Abbildung 6. Übersicht der Antriebskomponenten. (Links) Umfassender Überblick über Hyperantrieb-Komponenten. (Rechts) Abbildung der einzelnen na Microdrive Montage.
Diskussion
Dieses Protokoll beschreibt den Prozess der Konstruktion eines ultraleichten Microdrive-Array für Ausrichtung auf einen einzigen oder mehrere Hirnregionen in der Maus. Nach dem Abschluss der Konstruktion ist der Hyperantrieb bereit, mit Standard-Operationstechniken implantiert und mit der Maus die Schädel mit Zahnzement befestigt werden. Nach der Implantation können die Elektroden jeweils voran unabhängig mit einem kleinen Schraubendreher werden, während die Maus mit der Hand zurückgehalten. Der Abstand pro Runde, dass jede Elektrode Fortschritte wird durch die Steigung der Schraube bestimmt. Mit den Schrauben hier verwiesen rückt jede Elektrode ca. 150 mm pro Umdrehung, wenn auch halbe und viertel-Windungen für höhere Auflösung verwendet werden.
Die Dimensionen der Skizze in Figur 1B zu bestimmen, die Gesamtgröße des Implantats ist daher offensichtlich, dass die Möglichkeit, Implantate bidirektional zu skalieren, um die Maße zu diesem kritischen Skizze ändern. Zusätzlich the Länge der Schrauben kann erweitert werden, um tiefer Gehirnstrukturen zielen. Wir empfehlen maßgeschneiderte Titanschrauben, wie Licht und weniger spröde als Stahl sind. Beachten Sie, dass die Gegendrehschienen müssen linear mit der Schneckenlänge zu skalieren, und an diesem Punkt haben wir nicht bestimmt die maximale Länge, bei denen diese Strukturen können gedruckt werden. Mehrere Gehirnregionen Target, kann die Form des unteren Teils verändert werden. Die Zugabe bekannter großen Scheiben (Dicke 200 um), kann Abstandshalter zwischen Polyimide Targeting getrennten Strukturen des Gehirns (zB Hippocampus und präfrontalen Kortex) benötigt wird. Diese könnten in den Unterteil Montageschritte aufgenommen werden und später abgeschnitten, nachdem das Epoxidharz aushärtet.
Ein großer Nachteil dieser Konstruktion ist ihre Abhängigkeit von proprietärer Software (Solid in diesem Fall). Zukünftige Entwicklung der Open-Source-Programme, die benutzerfreundliche Gestaltung von Schnittstellen zu solchen Geräten mit minimalem Engineering backg bieten förderlichRunde wäre von enormer Vorteil für den Neurowissenschaften Gemeinschaft zu sein.
Dieses Verfahren bietet mehrere Vorteile gegenüber bestehenden Verfahren. Erstens ist das Design einfach, abhängig von sehr wenigen Skizzen (Abbildung 1). Zweitens ist es extrem leicht, erfordern keine Zahnzement oder schweres Material in seine Montage zu gehen. Insgesamt wiegt es rund 1,7 g - fast ein Drittel des Gewichts von kommerziell verfügbaren Implantate ähnliche Funktionalität. Drittens, es erfordert keine spezielle Ausrüstung zu machen - der Implantatkörper können aus mehreren Quellen 3D gedruckt werden (zum Beispiel approto.com, aber es gibt einige andere); Die Schrauben können nach Maß sein (zum Beispiel antrinonline.com); Die Federn sind im Handel erhältlich (zum Beispiel leesprings.com); und als Ergebnis die gesamte Montagevorgang an einem Tag geschehen. Schließlich sind diese Implantate verwendet wurden, um aus mehreren Hirnregionen während der natürlichen Nahrungssuche erfassen, strukturierte Verhaltens Aufgaben und Schlaf (Abbildung5).
Zukünftige Anwendungen dieser Methode sind der Umsetzung ihrer Skalierbarkeit. Es ist wahrscheinlich, dass das Implantat bidirektional einfach durch Veränderung 1 skaliert) die Größe der Skizze in Abbildung 1B und 2) die Anzahl der Microdrive Aufnahmen (1D) strukturiert. Beispielsweise kann es nach unten zum Datensatz aus frei verhalten Mäuse früh in der Entwicklung skaliert werden und skaliert oben aus Ratten, Kaninchen, Frettchen und möglicherweise nicht-menschlichen Primaten zu erfassen.
Ein letztes Wort ist es, die Leser, die entscheidend für eine erfolgreiche Umsetzung der skizzierten Methode ist, um alle Änderungen zu implementieren, um sie Design-Dateien beigefügt .stl Prototypen erinnern. Der Leser wird bemerken, zum Beispiel, dass die angehängte Entwurf enthält eine "Figur 8" Gegendreh Schiene. Dies war die beste Ausführung möglich angesichts der Beschränkung des 3D-Drucks, da ist es oft erforderlich, dass wir diese Löcher zu bohren. Nachdem es ein Kreis sein, comp würderomise Stabilität, aber es mit ein Quadrat oder eine abgewinkelte Form würde die Fähigkeit, 3D-Druck Unvollkommenheiten durch Bohren fixieren zu begrenzen.
Offenlegungen
Die Autoren haben nichts zu offenbaren.
Danksagungen
We thank members of the Wilson lab for their helpful advice on the fabrication method.
This work was supported by the Simons Foundation, a NIH pathway to independence career award from the NINDS and a NARSAD Young Investigator Award (to M.M.H.) as well as grants from the NIH (to M.A.W.).
Materialien
| Name | Company | Catalog Number | Comments |
| Microdrive screws | Antrin | Half Circle 0.6 UNM Titanium Screws. 8 mm thread. 9 mm length from under head. | |
| Tap-ease | AGS CO. | #TA2 | Tapping Grease |
| Microdrives | See .STL file | ||
| Drive Body | See .STL file | ||
| Outer Polyimide Guide Tube | Minvasive Components | IWG Item # 72113300022-012 | Length: 12’’, ID: 0.0071’’, OD: 0.0116’’, WALL: 0.00225’’ |
| Inner Polyimide Guide Tube | Minvasive Components | IWG Item # 72113900001-012 | Length: 12’’, ID: 0.0035’’, OD: 0.0055’’, WALL: 0.001’’ |
| Grounding Wire | A-M Systems, Inc. | Catalog # 791900 | 0.008'' Bare, 0.011'' Coated |
| Tri-Flow | Teflon based lubricant - Aerosol | ||
| Microdrive Springs | Lee Spring | Part # CB0050B 07 E | Outside Diameter: 1.016 mm, Hole Diameter: 1.193 mm, Wire Diameter: 0.127 mm, Free Length: 10.160 mm, Solid Length: 3.581 mm |
| Z-poxy 5 Minute | Pacer Technology (Zap) | PT37 | |
| Silver Paint | GC Electronics | Part #: 22-023 | Silver Print II |
| Tri-Flow | 20009 | ||
| 26 G Hypodermic Tube - Stainless Steel | Small Parts | HTXX-26T-12-10 | Length: 12’’, ID: 0.012’’, OD: 0.018’’ |
| EIB screws | Component Supply Co. | MX-0090-03SP | #00-90 x 3/16’’ |
| Fine Scissors - Toughcut | Fine Science Tools | 14058-09 | 22 mm |
| Transparency Paper | 3M | PP2500 | |
| Aluminum Foil | Reynold's Wrap Heavy Duty | Extra Thick |
Referenzen
- Boyden, E. S., Zhang, F., Bamberg, E., Nagel, G., Deisseroth, K. Millisecond-timescale, genetically targeted optical control of neural activity. Nat Neurosci. 8, 1263-1268 (2005).
- Fenno, L., Yizhar, O., Deisseroth, K. The development and application of optogenetics. Annu Rev Neurosci. 34, 389-412 (2011).
- Alexander, G. M., et al. Remote control of neuronal activity in transgenic mice expressing evolved G protein-coupled receptors. Neuron. 63, 27-39 (2009).
- Halassa, M. M., et al. Selective optical drive of thalamic reticular nucleus generates thalamic bursts and cortical spindles. Nat Neurosci. 14, 1118-1120 (2011).
- Tsien, J. Z., et al. Subregion- and cell type-restricted gene knockout in mouse brain. Cell. 87, 1317-1326 (1996).
- Nestler, E. J., Hyman, S. E. Animal models of neuropsychiatric disorders. Nat Neurosci. 13, 1161-1169 (2010).
- Collins, P. Y., et al. Grand challenges in global mental health. Nature. 475, 27-30 (2011).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Science. 261, 1055-1058 (1993).
- Wilson, M. A., McNaughton, B. L. Reactivation of hippocampal ensemble memories during sleep. Science. 265, 676-679 (1994).
- Nguyen, D. P., et al. Micro-drive array for chronic in vivo recording: tetrode assembly. J Vis Exp. (26), (2009).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten