
Method Article
Conception et de fabrication de Ultralight Poids, réglables sondes multi-électrodes pour électrophysiologiques enregistrements chez la souris
* Ces auteurs ont contribué à parts égales
Dans cet article
Résumé
Understanding the neural substrates of behavior requires brain circuit ensemble recording. Because of its genetic tractability, the mouse offers a model for circuit dissection and disease mimicry. Here, a method of designing and fabricating miniaturized probes is described that is suitable for targeting deep brain structure in the mouse.
Résumé
Le nombre d'enquêtes physiologiques dans le muscle de souris, mus, a connu récemment une progression, parallèlement à la croissance dans les méthodes de génétique visant à microcircuit dissection et de modélisation de la maladie. L'introduction de optogénétique, par exemple, a permis pour la manipulation bidirectionnelle de neurones génétiquement identifiés, à une résolution temporelle sans précédent. Afin de capitaliser sur ces outils et mieux comprendre les interactions dynamiques entre les microcircuits du cerveau, il est essentiel que l'on a la possibilité d'enregistrer à partir d'ensembles de neurones profondément dans le cerveau de ce petit rongeur, dans les deux préparations à tête fixe et se comporter librement. Pour enregistrer à partir des structures profondes et les couches cellulaires distinctes nécessite une préparation qui permet l'avancement précis des électrodes vers les régions du cerveau souhaités. Pour enregistrer des ensembles de neurones, il est nécessaire que chaque électrode soit mobile de manière indépendante, ce qui permet à l'expérimentateur de résoudre des cellules individuelles tout en laissant Neighbélectrodes ORING perturbées. Pour cela tous les deux dans une souris comportant librement nécessite une commande d'électrode qui est léger, élastique, et hautement personnalisable pour cibler des structures cérébrales spécifiques.
Une technique pour la conception et la fabrication de miniature, poids ultra-léger, réseaux d'électrodes Microdrive qui sont personnalisables individuellement et facilement assemblé à partir de pièces disponibles dans le commerce est présenté. Ces dispositifs sont facilement évolutives et peuvent être personnalisés pour la structure étant ciblé; il a été utilisé avec succès pour enregistrer des régions thalamiques et corticales chez un animal à se comporter pendant librement comportement naturel.
Introduction
Mus musculus a, en raison de sa traçabilité génétique, devenir rapidement le modèle animal de choix pour les physiologistes qui s'intéressent à niveau microcircuit dissection des neurones génétiquement identifiés et à enquêter sur des modèles murins de maladies humaines. Par exemple, l'introduction récente d'outils génétiques causales, tels que des actionneurs génétiques optogénétiques et chimiques a permis aux expérimentateurs de tester la nécessité et la suffisance des circuits neuronaux identifiés dans le comportement 1-4. La grande disponibilité des lignées transgéniques recombinants de pilote de souris Cre-(lignes), est amplifié par la simplicité expérimentale sous-types de neurones qui sont ciblées, en ajoutant à la valeur de la souris 5 pour ces expériences.
De même, les écrans génétiques et génomiques de larges associations de troubles neurologiques et psychiatriques communs ont facilité l'identification des facteurs de risque génétiques de la maladie du cerveau 6,7. Ces avancées, combinées à la cultureboîte à outils pour la manipulation génétique et l'ingénierie des génomes chez la souris, ont fait l'organisme de choix pour la modélisation des maladies humaines. La combinaison de modèles de maladies et des outils génétiques causales fournit une occasion sans précédent pour comprendre la maladie du cerveau et l'identification de cibles de niveau de circuit pour les interventions.
Pour tirer pleinement parti de ces outils moléculaires et mieux comprendre la fonction de microcircuit de la santé et de la maladie, il est essentiel de les coupler avec des lectures physiologiques de l'activité du cerveau. Idéalement, l'expérimentateur serait en mesure de surveiller un grand nombre de neurones tout en conservant la résolution de la cellule unique. Extracellulaires, des enregistrements multi-électrodes chez les animaux se comportent librement offrent cette possibilité; Cependant, l'utilisation de cette technologie dans la souris a été limitée. Pour enregistrer de petits objets (par exemple, la couche CA1 de l'hippocampe), l'utilisation d'électrodes réglables est nécessaire que les mouvements dans les électrodes d'enregistrement suivantes Surgical implantation, il est impossible de maintenir la stabilité d'enregistrement 8,9. Traditionnellement, les procédés qui ont été utilisés pour déplacer les électrodes dans le cerveau imposent des limites de poids quand il est utilisé chez la souris, ce qui rend difficile de coupler l'enregistrement d'un grand nombre de neurones ayant un comportement dans cet organisme.
Ici, les procédés sont mis en place pour la fabrication de miniatures, ultra-légers, les réseaux de microélectrodes qui sont individuellement personnalisable à la région du cerveau est ciblée, optogénétique-compatible, et assemblés à partir de pièces facilement disponibles dans le commerce. Chaque "Microdrive" dans le multi-électrode "hyperdrive" utilise un mécanisme à ressort et à vis pour faire avancer l'électrode et un rail en plastique, construit dans le corps hyperdrive, pour contrer le couple de la vis. Tout d'abord, le processus de conception des organes hyperdrive et Microdrive dans un programme de CAO pour l'impression 3D est décrite. En concevant corps hyperdrive qui sont personnaliséspour des structures particulières, il est possible d'augmenter la précision de ciblage et d'augmenter encore le rendement de la préparation. Deuxièmement, le procédé de fabrication est décrit en détail, dans lequel le réseau multi-électrode est assemblée à la main à partir de pièces qui sont disponibles dans le commerce. Cette technique a été utilisée, avec succès, pour enregistrer à partir des ensembles de neurones dans l'hippocampe, le thalamus et le cortex chez l'animal se comporter librement pendant la recherche de nourriture naturelle et tâches opérant.
Protocole
1. intention de conception
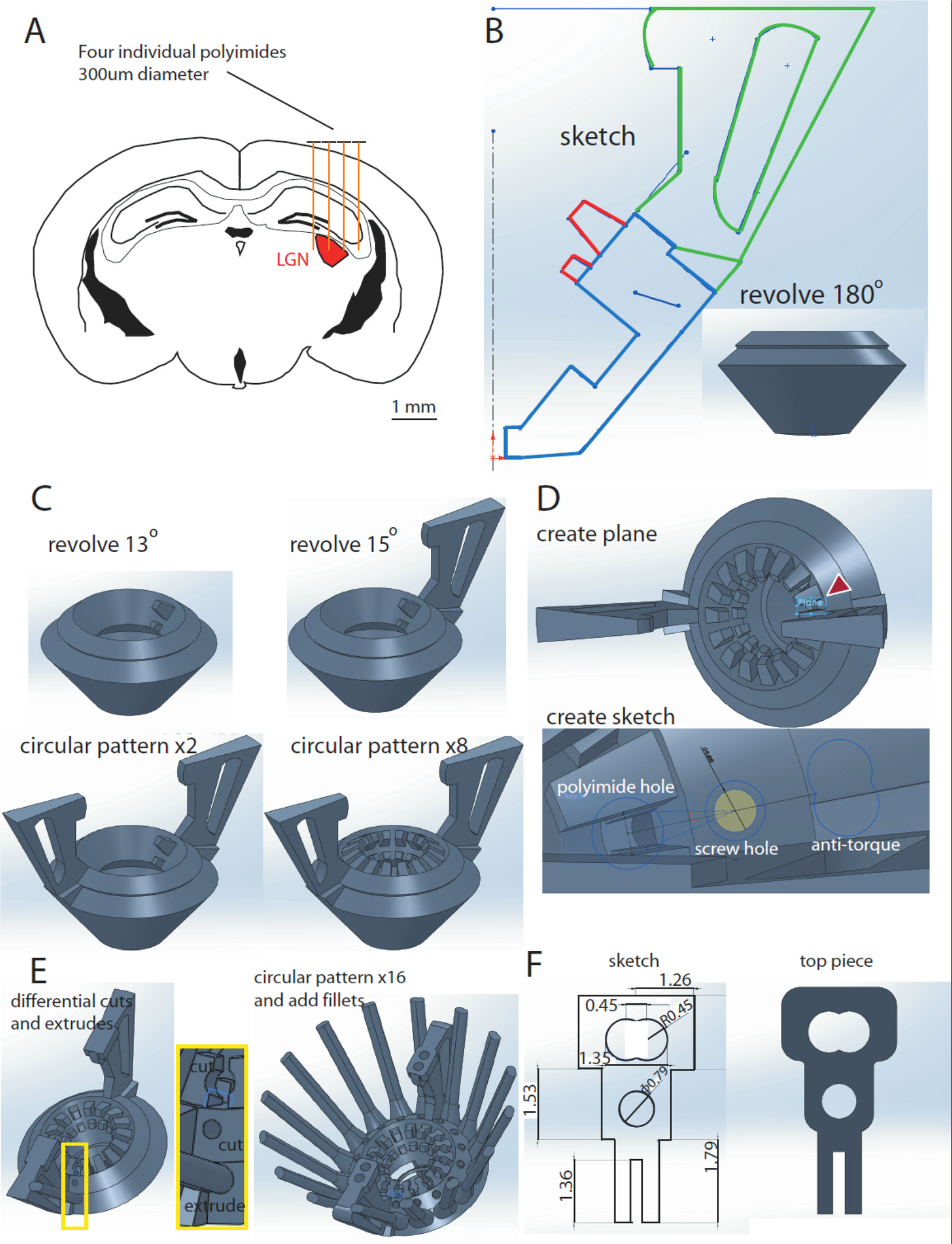
- Identifier la région du cerveau de choix (noyau genouillé latéral (CGL, le thalamus visuel)) en faisant défiler les coupes sagittales de l'atlas du cerveau de la souris électroniques.
- Au coordonnées A / P (-2,3 à -2,7 mm), le CGL est plus large. Utilisez cette région pour concevoir le fond de la voiture (des pièces du bas).
REMARQUE: Un total de 8 électrodes mobiles indépendamment peut être utilisée pour cibler les LGN (4-6 électrodes, il sera à la CGL, 2-4 électrodes sont ajoutés pour compenser les erreurs d'implantation, figure 1A). - Dans Solidworks, dessiner un croquis du corps de conception (figure 1B) dans le plan frontal. Cliquez croquis, puis utiliser la combinaison de lignes et de courbes à tracer une esquisse qui comprendra les contours de la base d'entraînement, poignées et polyamide demi fentes, comme montré. Assurez-vous que le contour ne contient pas de lacunes ouvertes. Ensuite, cliquez sur Quitter l'esquisse.
- Ensuite, sélectionnez les deux plans avant droit et, et cliquez sur "Créerte Axe ". Ensuite, créer le design modèle 3D du corps en tournant le contour croquis bleu souligné (figure 1B) à 360 °. Dans le menu des fonctions, cliquez sur "Bossage / Base". Choisissez la ligne médiane que l'axe de révolution. Dans la section des paramètres, sous la direction de 1 cliquez aveugles, et sous l'angle de sélectionner 360.00 deg. Dans la section des contours sélectionné, assurez-vous que le bleu souligné contour est celui qui est sélectionné.
- Créer un polyimide demi-fente en tournant le rouge souligné contours 13 ° (figure 1C, haut, à gauche). Étapes sont identiques à 1.4 ci-dessus, sauf pour la spécification d'angle
- Créez un lecteur gère en faisant tourner le contour vert 15 ° (figure 1C, en haut à droite).
- Créer la deuxième manche d'entraînement en utilisant la fonction de forme circulaire (figure 1C, en bas à gauche). Dans le menu des fonctions, cliquez sur "Motif circulaire». Dans les paramètres, sélectionnez la ligne médiane comme axe de révolution. Sélectionnez 180,00 ° que l'angle, et 2 comme le nombre d'occurrences. Assurez-vous que la première poignée est sélectionné sous "Caractéristiques de modèles".
- Créer seize polyimide demi-fentes à l'aide de la fonction de forme circulaire (figure 1C, en bas à gauche). Effectuer des mouvements similaires à 1,7, mais sélectionnez le polyimide première demi-fente, comme les "Fonctions à répéter". L'angle est de 22,5 ° et le nombre de cas sont 16 (Remarque: il s'agit seulement 360 ° divisé par le nombre de fois que vous voulez le modèle de la fonction)
- Créer un nouveau plan sur lequel de tirer la prise de polyimide. Atteindre cet objectif en cliquant sur "insert" dans le menu principal. Cliquez sur "Géométrie de référence", sélectionnez les deux côtés de fentes demi polyimide, puis cliquez sur "Créer un nouveau plan"; (Figure 1D, en haut)
- Créez le réceptacle Microdrive (le trou vis, polyimides trou et anti-couple rail (figure 1D, en bas). Atteindre cet objectif en créantun croquis qui englobe toutes ces fonctionnalités sur le nouveau plan créé en 1.9. Notez que pour les rails anti-couple, définir une ligne médiane entre les deux parties dans les premières places polyamide. Ensuite, tirer les rails anti-couple en créant deux cercles perpendiculaires à l'axe, dont les centres sont une rayon de l'autre, et ensuite la coupe du contour du milieu.
- Dans le menu Options, cliquez sur "Extrusion Bossage / Base" pour créer le rail anti-couple et choisissez une extrusion aveugle de 10 mm allant vers le haut et de 2 mm d'aller vers le bas. Pour le trou de la vis et le trou de polyimide, cliquez sur "coupe Extrusion", et choisissez 6mm aveugle, et quelques mm allant vers le haut pour les deux (figure 1E, gauche).
- Motif le récipient de micro-entraînement 16x, à l'aide du centre que l'axe de révolution (22,5 °, 16 cas, l'espacement égal), (figure 1E, à droite)
- Sur le dessus de la poignée, dessiner une zone de 3 mm x 3 mm à partir de la pointe centrale de la poignée de l'unité, face à l'un centralxis. Extruder cette 2 mm vers le haut à l'aide de la fonction "Extrusion Boss". Dessiner des cercles de 1 mm de diamètre aux endroits où les vis de la BEI vont aller sur. Ensuite, faire 1,5 mm "Extrusion Cut" pour faire un trou. Ensuite, le motif de la boîte et le trou deux fois en utilisant la fonction Motif circulaire (superposition du texte: 180 °, 2 cas, l'espacement égal, autour de l'axe central).
- Utilisez les dimensions (en mm) de la figure 1F pour dessiner un croquis haut de pièce. Utilisez le "Extrusion Bossage / Base" pour faire un modèle 3D de celui-ci.
NOTE: Après ces étapes de la conception d'entraînement est terminée. Le corps d'un disque physique est créé par le processus de stéréolithographie. Il ya un certain nombre d'entreprises qui offrent l'impression de stéréolithographie à partir des fichiers STL. Nous vous recommandons de services qui peuvent imprimer en plastique dur (comme Accura® 55), avec une résolution minimale d'au moins 0,1 mm.
2 Préparation des composants Hyperdrive
- Disposez une petite(: ". / 0116 'ID / OD 0,0071' '; mur: 0,00225) morceau de ruban adhésif double face sur une surface plane et de réduire le nombre nécessaire de 31 G tubes de polyimide à environ 8 centimètres (Figures 2A - 2B) .
- Étalez la première couche de tubes de guidage sur le ruban adhésif double face, en prenant soin de placer les tubes de guidage le plus près possible les uns des autres sur la bande. Tamponnez une petite quantité de fines, de la colle cyanoacrylate sur la couche de polyimides. (Figure 2C)
- Poser rapidement une deuxième couche de polyimides (figure 2D).
- Créer un espace réservé à fibre optique utilisant une canule 26 G. Assurez-vous que cela est lubrifié avec un lubrifiant à base de téflon avant d'être incorporé dans l'ensemble (figure 2E).
- Appliquer une ligne d'époxy 4-5 mm de longueur perpendiculaire à la polyimide faisceau (figure 2F). Une fois que l'époxy a durci (2-3 h), retirez la bande de la couche inférieure et reePOXY l'autre côté. Après que la résine époxy durcie à nouveau, le 26 G canule peut être retirée et l'assemblage passe dans le milieu à l'aide d'une lame de rasoir (figure 2G), résultant en deux matrices de polyimide, dont chacun peut être utilisé pour une hyperpropulseur (figure 2H).
- Imprimez le modèle de cône sur une feuille de papier de transparence et de couper une feuille correspondante de fortes feuille aluminium devoir (figures 3A - 3C).
- Appliquer une couche de résine époxy à la feuille d'aluminium et appliquer rapidement la transparence du papier. L'aide d'un objet lourd ou une cheville en bois, lisser la résine époxy afin qu'il soit uniformément répartie (figure 3D).
- Découpez le gabarit de cône et serrer ensemble en utilisant une pince crocodile. Enfin, utiliser une autre goutte d'époxy pour fixer définitivement les pièces (figure 3E).
3. d'assemblage final de l'Microdrive
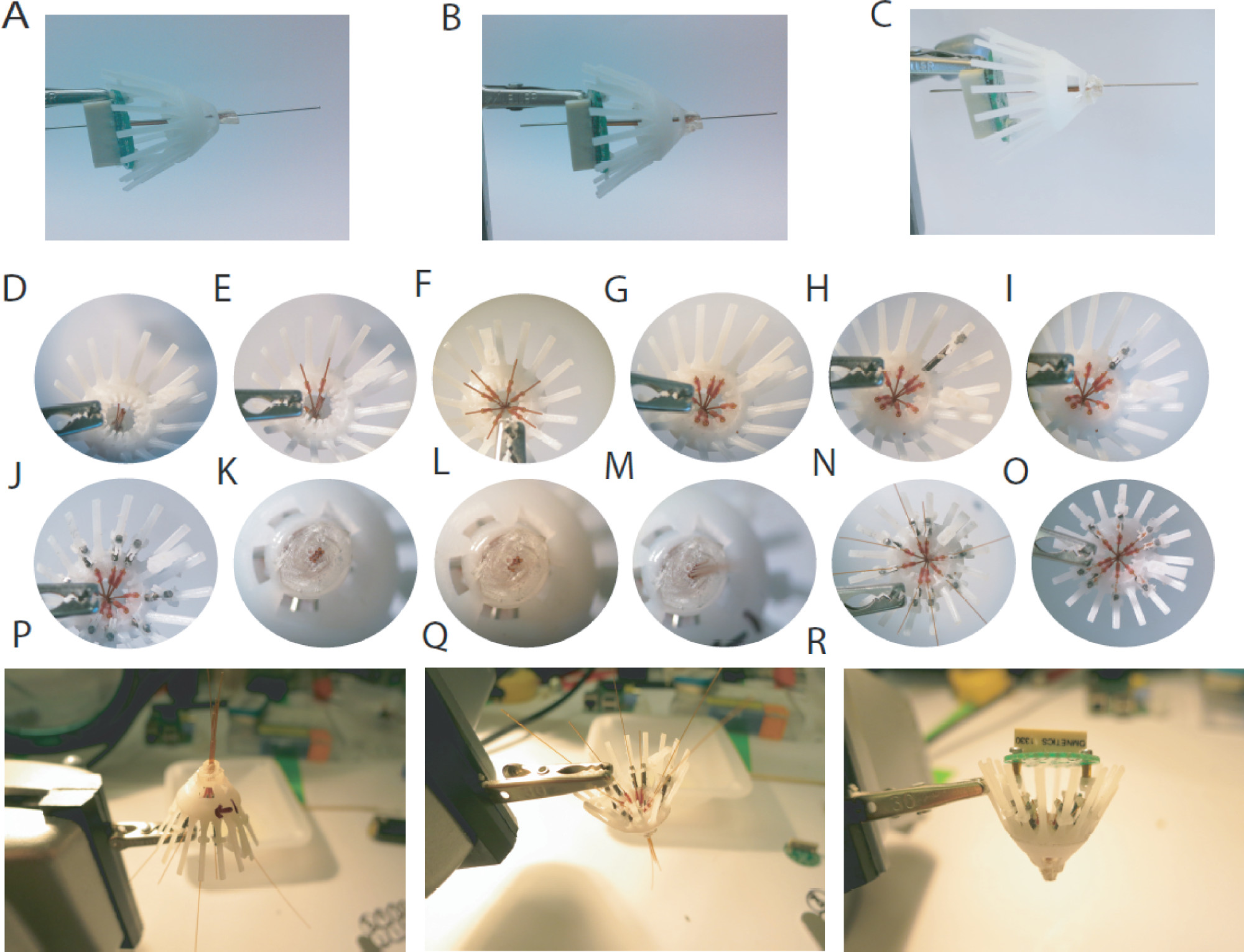
- Fixez la BEI pour le corps d'entraînementEt réinsérer la canule 26 G à travers la matrice de tubes de guidage de polyimide. Aligner la matrice de polyimide avec le corps d'entraînement avec l'orifice de fibre optique dans la BEI faire en sorte que les tubes de guidage sont perpendiculaires à la BEI et époxy de la matrice pour le corps d'entraînement en prenant soin de s'assurer qu'aucune époxy s'écoule dans les tubes de guidage ou dans l' corps d'entraînement (figures 4A - 4C).
- Plan chaque tube de guidage dans la matrice de polyimide à un support correspondant sur la paroi intérieure du corps d'entraînement. Faites glisser un petit anneau de 33 G polyimide sur chaque tube de guidage et dans le support et appliquez une petite quantité de colle cyanoacrylate pour fixer chaque tube de guidage. (Figures 4D - 4E) Enfin, époxy tout l'appareil de la paroi interne du corps d'entraînement et couper les polyimides de sorte qu'ils dépassent juste au-dessus de la lèvre intérieure (figures 4F - 4G).
- Construire un assemblage Microdrive en mettant un de la coutume-bvis de UILT à travers le trou central d'une pièce du haut, puis l'un des ressorts 5 mm. Faites glisser le trou extérieur de la pièce supérieure sur l'un des rails, et conduisez lentement la vis. Serrer la vis jusqu'à ce que le printemps arrive c'est longueur comprimée minimum. (Figures 4H - 4E) Répétez ce processus pour chaque rail / Microdrive (figure 4J).
- Tournez la baie de disque à l'envers et prendre une photo de la matrice du tube de guidage. Cette image sera utilisée pour cartographier l'emplacement du tube de guidage correspondant à chaque Microdrive (Figure 4K).
- Insérer un tube en polyimide (0,005 ") dans chaque tube de guidage de la partie inférieure de la base d'entraînement. Laissez le tube de support s'étend de 1-2 mm à partir du haut de la Microdrive complètement abaissée et enregistrer sur la photo de l'identité de la micro-voiture correspondant. (Figures 4L - 4M)
- Epoxy le tube de polyimide pour le soutien Microdrive, en prenant soin de ne pas let époxy courir à travers le Microdrive sur le ressort ou à vis (figures 4N, 4P - 4Q).
- Abaisser complètement tous les micromoteurs. Couper les tubes de polyimide au ras du fond de la matrice de polyimide (figure 4O).
- Monter la carte d'interface de l'électrode à la base d'entraînement à l'aide de deux # 00-90 x 'vis 3/16 "(Figure 4R).
NOTE: A ce stade, le tableau de commande est prêt à être chargé avec stereotrodes ou tétrodes. Pour plus de détails sur la construction de tétrode et le chargement, s'il vous plaît voir 10. La base d'entraînement imprimés et les micromoteurs ont été conçus dans SolidWorks 2011 CAO 3D logiciel: lien pour télécharger les fichiers SolidWorks. - Après le chargement, inverser le lecteur et soigneusement abaisser le cône de blindage au-dessus de la route de sorte que seule la pièce de fond fait saillie. Fixer le cône de blindage epoxying par le cône de l'organe d'entraînement.
- Après que le cône est fixé, une petite bande de longueurfil d'acier inoxydable (.008 '' Bare, 0,011 '' couché) et la broche à la BEI. Gratter la, aluminium partie interne du cône d'une aiguille et la masse du fil d'acier à l'aide du cône de la peinture d'argent. Une fois la peinture d'argent a séché, renforcer avec un peu d'époxy. Sinon, le fil d'acier peut être directement fixé sur le cône avec un peu de résine époxy conductrice (MG Chemicals, Surrey, Canada).
Résultats
construction de l'implant est un processus qui commence avec la conception de la 3D imprimé hyperpropulseur (figure 1), de procéder à la construction de la pièce de fond (figure 2), le cône de blindage (figure 3), et le montage final de l'hyperespace, par construction individuelle des micromoteurs (figure 4). Ces étapes sont suivies par le chargement des micromoteurs avec des électrodes (s'il vous plaît voir 10). Après cette étape, il est possible d'utiliser ces dispositifs pour enregistrer à partir de plusieurs régions du cerveau. Sur la figure 5, un exemple des traces de l'enregistrement simultané du noyau genouillé latéral (CGL) et l'hippocampe (HPC) sont indiqués. La stabilité des unités simples présentés dans la figure 5B a été remarquable, montrant des formes d'ondes cohérentes sur un parcours de plusieurs jours. Ces neurones ont été confirmés à LGN neurones en étant sensibles à la stimulation de la diode émettant de la lumière, comme représenté par laperistimulus temps histogramme (PSTH) dans la figure 5C. Dans cette même préparation, HPC potentiel de champ local a été enregistré comme un proxy pour l'état comportemental. Ces traces ont montré de fortes ondulations des vagues (Figure 5D), au cours de la quiétude de comportement, conformément à leur origine hippocampique.

Figure 1: Conception de l'hyperdrive dans Solidworks. A. Schéma d'une coupe frontale d'un cerveau de souris à A / P coordonne -2,3 à -2,7 mm de bregma. Quatre polyimides individuels (300 um) sont tirés au-dessus du cortex, illustrant le ciblage de la région de LGN (rouge) avec des électrodes. B. Schéma du corps de conception. Tourner le contour bleu 180 ° résultats dans un modèle de corps de conception 3D (en médaillon). C. L'ajout de fentes de polyimide et entraînement assure à l'organisme de conception. Renouvelable la highl rougecontours ighted B par 13 ° entraîne une demi-fente polyimide (en haut à gauche). Une poignée de l'unité est ajouté en faisant tourner le contour vert dans B par 15 ° (en haut à droite). La deuxième manette est ajouté à l'aide de la fonction de forme circulaire (en bas à gauche). La même fonction peut être utilisée pour créer les 16 emplacements de demi polyimide (en bas à droite). D. A nouveau plan est ajouté à la conception (en haut), permettant de créer une nouvelle esquisse pour la prise Microdrive, composé du trou de vis, les polyimides trou et le rail anti-couple (en bas). E. Ces fonctionnalités seront mises en œuvre dans la conception en utilisant les fonctions de coupe et extrusion et tourné de 360 ° pour créer 16 logements. F. Dimensions de l'esquisse haut de pièce (à gauche) et le modèle 3D (à droite ). S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}

Figure 2: Préparation de la pièce de fond de l'hyperdrive. A. Le premier tube de polyimide est placé sur un adhésif double face. B. tubes suivants sont placés individuellement, en prenant soin de minimiser l'espace entre les tubes. C. Après la première couche est aménagé , une fine couche de colle cyanoacrylate est appliqué D. Une deuxième couche de polyimides est ajouté rapidement avant que la colle est sèche. E. Au sommet de la polyimides paquet, une canule G 26 est ajouté en tant que titulaire de la place pour la fibre optique. F . L'ensemble de construction est solidement fixé à une goutte d'époxy. G. Après l'enlèvement de la canule, le produit d'assemblage peut être coupé au milieu d'une lame de rasoir, ce qui donne deux pièces inférieures identiques. H. Voir sur la surface d'une coupe de fini pièce de fond, illustrant les deux doubles rangées de quatre polyimideset le trou de la fibre optique. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}

Figure 3 Montage de l'hyperdrive. A. La matrice de polyimide est inséré dans le corps d'entraînement, et aligné avec la carte d'interface électronique (BEI) en utilisant le 26 G canule. B. Une petite quantité d'époxy est utilisé pour fixer la matrice de polyimide à le corps d'entraînement. C. Une deuxième application de l'époxy peut être nécessaire, après quoi l'excès de résine époxy doit être vue dremeled distance D. haut sur le corps d'entraînement avec la matrice insérée. E. aide d'un petit morceau de tube de 33 g de polyimide, la partie extérieure des tubes de guidage sont fixés dans les fentes correspondantes de l'organe d'entraînement. F. Tous les tubes de guidage extérieurs devraient être mis en correspondance avec un rail, en prenant soin de minimiser la tension sur les tubes. G. Après tous les tubes de guidage extérieurs sont mappés, ils doit être fixé avec de l'époxy et coupé juste au-dessus de la lèvre intérieure. H. Un Microdrive Ensemble, constitué d'une vis sur mesure, un ressort 5 mm et une pièce supérieure doit être assemblé et placé sur un rail correspondant à l'un des tubes de guidage. microdisque I. Chaque ensemble doit être soigneusement vissé dans le corps d'entraînement. J. Après l'assemblage, chaque tube de guidage doit avoir un Microdrive correspondant K. Vue de dessous de la matrice polyimide L -.. M. des tubes de polyimide (0,005 ") sont insérés dans chaque tube de guidage extérieur. N. Chaque tube de guidage interne doit être bien ajusté dans la fourchette de cela microdisque correspondant. O. Les tubes internes en polyimide sont fixés avec de l'époxyde correspondant à la microdisque etcouper aussi court que possible. Après tous les tubes de guidage intérieures sont epoxied, les tubes de guidage intérieures dépassant du polyimide-matrice doivent être coupées au ras de la lèvre de la matrice. P. inversé de vue macro de la route au cours de la intérieure chargement du tube de guidage. Q. Top vue macro de l'entraînement pendant intérieure chargement du tube de guidage. R. hyperdrive avec la BEI attaché, prêt à être chargé avec des électrodes Entièrement assemblé. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}

. Figure 4 Préparer le cône de protection A. Cône modèle imprimé sur du papier de transparence B -. D. Une feuille d'aluminium est collée à la matrice en utilisant une fine couche d'époxy. E. < / Strong> Après avoir coupé le modèle, le cône est formé et collées ensemble avec de l'époxy.

Figure 5 enregistrements multi-sites à l'aide de l'hyperdrive ultra-léger-poids. A. Une souris se comporter librement avec l'hyperdrive implanté. B. Exemples de deux formes d'onde unique unité enregistrements de cette souris. C. gauche, section coronale du cerveau de la souris mettant en évidence le corps genouillé latéral, où certaines des électrodes ont été abaissés. A droite, exemple peristimulus histogrammes de temps (PSTHs) de deux neurones du CGL alignés à la stimulation visuelle (barre jaune). D. Droit, coupe coronale soulignant l'hippocampe (HPC), où un autre jeu d'électrodes ont été abaissés. Droite, exemple de champ local enregistrement potentiel d'une ondulation de l'hippocampe (sélectionner rouge).

Figure 6 Vue d'ensemble des composants de l'entraînement. (Gauche) Vue d'ensemble complète de composants hyperdrive. (À droite) Illustration de na assemblage Microdrive individu.
Discussion
Ce protocole décrit le processus de construction d'un tableau Microdrive ultra-léger pour cibler un seul ou plusieurs régions du cerveau chez la souris. Après les étapes finales de la construction, la hyperpropulseur est prête à être implantée en utilisant des techniques d'implantation chirurgicale standard et fixé sur le crâne de la souris avec du ciment dentaire. Après l'implantation, les électrodes peuvent chacun être avancé indépendamment à l'aide d'un petit tournevis, tandis que la souris est retenu par la main. La distance par tour que chaque électrode avances est déterminé par le pas de la vis. En utilisant les vis mentionnées ici avancer chaque électrode d'environ 150 mm par tour, et si la moitié quart de tour peuvent être utilisés pour une plus grande résolution.
Les dimensions de l'ébauche de la figure 1B déterminent la taille globale de l'implant, donc de manière évidente à l'échelle de façon bidirectionnelle des implants est de modifier les dimensions de ce dessin critique. De plus, elongueur e de la vis peut être étendu pour cibler des structures profondes du cerveau. Nous vous recommandons de coutume fait vis en titane, comme ceux-ci sont la lumière et moins fragile que l'acier. Notez que les rails anticouple doivent croître linéairement avec la longueur de la vis, et en ce moment nous n'avons pas déterminé la longueur maximale à laquelle ces structures peuvent être imprimés. Pour cibler plusieurs régions du cerveau, la forme de la pièce de fond peut être modifié. L'ajout de rondelles de taille connues (épaisseur 200 um), pourrait fournir des entretoises nécessaires entre les polyimides ciblant structures cérébrales distinctes (par exemple, l'hippocampe et le cortex préfrontal). Celles-ci pourraient être inclus dans les mesures de fond pièce d'assemblage, et plus tard coupés après l'époxy durcit.
Une grande limitation de cette conception est sa dépendance à l'égard des logiciels propriétaires (de Solidworks dans ce cas). Le développement futur des programmes open source qui offrent des interfaces conviviales propices à la conception de ces équipements avec un minimum de backg d'ingénierieronde serait un avantage énorme à la communauté des neurosciences.
Ce procédé présente plusieurs avantages par rapport aux méthodes existantes. Tout d'abord, le design est simple, dépend très peu de croquis (figure 1). Deuxièmement, il est ultra-léger, ne nécessitant pas de ciment dentaire ou du matériel lourd d'aller dans son ensemble. Dans l'ensemble, il pèse environ 1,7 g - près d'un tiers du poids des implants disponibles dans le commerce de fonctionnalités similaires. Troisièmement, il ne nécessite aucun équipement spécialisé à faire - le corps de l'implant peut être imprimé en 3D à partir de plusieurs sources (par exemple approto.com, mais il ya plusieurs autres); les vis peuvent être fabriqués sur mesure (par exemple antrinonline.com); les ressorts sont disponibles dans le commerce (par exemple leesprings.com); et à la suite du processus d'assemblage peut se produire en un jour. Enfin, ces implants ont été utilisés pour enregistrer à partir de plusieurs régions du cerveau au cours de la recherche de nourriture naturelle, des tâches comportementales structurées et le sommeil (figure5).
Les futures applications de cette méthode comprennent l'exécution de son évolutivité. Il est probable que l'implant peut être mis à l'échelle de façon bidirectionnelle simplement en changeant 1) la taille du schéma de la figure 1B et 2) le nombre de récipients Microdrive (Figure 1D) à motifs. Par exemple, il peut être mis à l'échelle vers le bas pour enregistrer à partir de la souris se comportent librement au début du développement, et mise à l'échelle vers le haut pour enregistrer des rats, des lapins, des furets et des primates non humains peut-être.
Un dernier mot est de rappeler au lecteur que critique de la mise en œuvre réussie de la méthode décrite est de prototyper les modifications qu'ils mettent en œuvre pour .stl fichiers de conception attachés. Le lecteur remarquera, par exemple, que la conception ci-joint contient une "figure 8" rail anti-couple. C'était la meilleure conception possible compte tenu de la limitation de l'impression 3D, comme il est souvent nécessaire que nous creusons ces trous. Avoir ce soit un cercle, ne compstabilité romise, mais avoir ce soit un carré ou une forme coudée limiterait la capacité de fixer les imperfections d'impression 3D par forage.
Déclarations de divulgation
Les auteurs n'ont rien à divulguer.
Remerciements
We thank members of the Wilson lab for their helpful advice on the fabrication method.
This work was supported by the Simons Foundation, a NIH pathway to independence career award from the NINDS and a NARSAD Young Investigator Award (to M.M.H.) as well as grants from the NIH (to M.A.W.).
matériels
| Name | Company | Catalog Number | Comments |
| Microdrive screws | Antrin | Half Circle 0.6 UNM Titanium Screws. 8 mm thread. 9 mm length from under head. | |
| Tap-ease | AGS CO. | #TA2 | Tapping Grease |
| Microdrives | See .STL file | ||
| Drive Body | See .STL file | ||
| Outer Polyimide Guide Tube | Minvasive Components | IWG Item # 72113300022-012 | Length: 12’’, ID: 0.0071’’, OD: 0.0116’’, WALL: 0.00225’’ |
| Inner Polyimide Guide Tube | Minvasive Components | IWG Item # 72113900001-012 | Length: 12’’, ID: 0.0035’’, OD: 0.0055’’, WALL: 0.001’’ |
| Grounding Wire | A-M Systems, Inc. | Catalog # 791900 | 0.008'' Bare, 0.011'' Coated |
| Tri-Flow | Teflon based lubricant - Aerosol | ||
| Microdrive Springs | Lee Spring | Part # CB0050B 07 E | Outside Diameter: 1.016 mm, Hole Diameter: 1.193 mm, Wire Diameter: 0.127 mm, Free Length: 10.160 mm, Solid Length: 3.581 mm |
| Z-poxy 5 Minute | Pacer Technology (Zap) | PT37 | |
| Silver Paint | GC Electronics | Part #: 22-023 | Silver Print II |
| Tri-Flow | 20009 | ||
| 26 G Hypodermic Tube - Stainless Steel | Small Parts | HTXX-26T-12-10 | Length: 12’’, ID: 0.012’’, OD: 0.018’’ |
| EIB screws | Component Supply Co. | MX-0090-03SP | #00-90 x 3/16’’ |
| Fine Scissors - Toughcut | Fine Science Tools | 14058-09 | 22 mm |
| Transparency Paper | 3M | PP2500 | |
| Aluminum Foil | Reynold's Wrap Heavy Duty | Extra Thick |
Références
- Boyden, E. S., Zhang, F., Bamberg, E., Nagel, G., Deisseroth, K. Millisecond-timescale, genetically targeted optical control of neural activity. Nat Neurosci. 8, 1263-1268 (2005).
- Fenno, L., Yizhar, O., Deisseroth, K. The development and application of optogenetics. Annu Rev Neurosci. 34, 389-412 (2011).
- Alexander, G. M., et al. Remote control of neuronal activity in transgenic mice expressing evolved G protein-coupled receptors. Neuron. 63, 27-39 (2009).
- Halassa, M. M., et al. Selective optical drive of thalamic reticular nucleus generates thalamic bursts and cortical spindles. Nat Neurosci. 14, 1118-1120 (2011).
- Tsien, J. Z., et al. Subregion- and cell type-restricted gene knockout in mouse brain. Cell. 87, 1317-1326 (1996).
- Nestler, E. J., Hyman, S. E. Animal models of neuropsychiatric disorders. Nat Neurosci. 13, 1161-1169 (2010).
- Collins, P. Y., et al. Grand challenges in global mental health. Nature. 475, 27-30 (2011).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Science. 261, 1055-1058 (1993).
- Wilson, M. A., McNaughton, B. L. Reactivation of hippocampal ensemble memories during sleep. Science. 265, 676-679 (1994).
- Nguyen, D. P., et al. Micro-drive array for chronic in vivo recording: tetrode assembly. J Vis Exp. (26), (2009).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.