
Method Article
Проектирование и изготовление Ultralight Вес, Регулируемые многоэлектродной Зонды для Электрофизиологические записи в мышах
* Эти авторы внесли равный вклад
В этой статье
Резюме
Understanding the neural substrates of behavior requires brain circuit ensemble recording. Because of its genetic tractability, the mouse offers a model for circuit dissection and disease mimicry. Here, a method of designing and fabricating miniaturized probes is described that is suitable for targeting deep brain structure in the mouse.
Аннотация
Ряд физиологических исследований в мышь, Mus MUSCULUS, пережила недавний всплеск, параллельно росту в методах генетического таргетинга для микросхемы рассечения и моделирования заболевания. Введение optogenetics, например, позволило для двунаправленного манипуляции генетически определенных нейронов, с беспрецедентной временным разрешением. Чтобы извлечь выгоду из этих инструментов и получить представление о динамических взаимодействий между микросхем мозга, важно, что один имеет возможность записи с ансамблями нейронов глубоко внутри мозга этого маленького грызуна, в обоих головных фиксированной и свободно ведут себя препаратов. Для записи с глубинных структур и различных слоев клеток требует подготовки, что позволяет точно продвижение электродов по достижению желаемых областей мозга. Для записи нейронных ансамблей, необходимо, чтобы каждый электрод быть независимо подвижными, что позволяет экспериментатору решить отдельные клетки, оставляя neighbÖring электроды спокойно. Чтобы сделать как в свободно ведет себя мыши требуется электродный диск, который легкий, упругий, и настраиваемый для ориентированных на конкретные структуры мозга.
Техника для проектирования и изготовления миниатюру, ультралайт вес, Microdrive электродные массивы, которые по отдельности настраиваемый и легко собирается из коммерчески доступных частей представлена. Эти устройства легко масштабируются и могут быть настроены в структуру мишенью; он успешно используется для записи от таламуса и областях коры в свободно ведет себя животное во время естественного поведения.
Введение
Mus Musculus имеет, в связи с его генетической сговорчивости, быстро стал животная модель выбора для физиологов, заинтересованных в микросхемы уровня рассечения генетически определенных нейронов и в расследовании мышиные модели заболеваний человека. Например, недавнее введение причинных генетических инструментов, таких как optogenetic и химических генетических приводов позволило экспериментаторам, чтобы проверить необходимость и достаточность выявленных нейронных цепей в поведении 1-4. Широкая доступность рекомбинантных трансгенных линий драйверов мыши (CRE-линии), усилилась экспериментальную легкость, с помощью которого нейрон подтипы целевой, добавляя к стоимости мыши для этих экспериментов 5.
Точно так же, генетический скрининг и геномные широкие объединения общих неврологических и психиатрических расстройств способствовали выявлению генетических факторов риска для болезни мозга 6,7. Эти достижения, в сочетании с выращиваниемИнструментарий для генетических манипуляций и генной инженерии мышей, сделали его организм выбора для моделирования болезни человека. Сочетание моделей заболеваний и причинных генетических инструментов предоставляет беспрецедентную возможность для понимания болезни мозга и идентификации целей сеансового уровня для интервенций.
Чтобы в полной мере извлечь выгоду из этих молекулярных инструментов и получить представление о функции микросхемы в норме и патологии, важно Пару им физиологических показаний мозговой активности. В идеале, экспериментатор мог бы контролировать большое количество нейронов при сохранении разрешение одной клетки. Внеклеточные, многоэлектродная запись в свободно ведут себя животные предоставить такую возможность; Однако, использование этой технологии у мышей была ограничена. Для записи с малых объектов (например, CA1 слой в гиппокампе), использование регулируемых электродов необходимо как небольших движений в регистрирующих электродов следующих Surgicаль имплантация делают невозможным поддержание стабильности записи 8,9. Традиционно, методы, которые были использованы для перемещения электродов в мозге накладывают ограничения веса при использовании в мыши, что делает его сложным для пары записи большого числа нейронов с поведением в этом организме.
Здесь методы вводятся для изготовления миниатюрных, ультра-легкие, Микроэлектродные массивы, которые по отдельности настраиваемый в области мозга становятся мишенью, optogenetics-совместимый, и легко собирается из коммерчески доступных деталей. Каждый "Microdrive" в многоэлектродной "гипердвигатель" использует механизм весенне-винт для продвижения электрода и пластиковую направляющую, построенный в гипердвигателя тела, для противодействия крутящего момента от винта. Во-первых, это процесс проектирования гиперпривод органы и Microdrives в программе CAD для 3D-печати описывается. При проектировании HYPERDRIVE органы, которые настроеныдля конкретных структур, можно повысить точность таргетинга и дальнейшего увеличения выхода препарата. Во-вторых, процесс изготовления описан более подробно, при этом массив мульти-электрод собранном вручную из частей, которые являются коммерчески доступными. Эта техника была использована, успешно, запись с ансамблями нейронов в гиппокампе, таламусе и коре в свободно ведет себя животное при естественном кормлении и оперантного задач.
протокол
1 Дизайн Intent
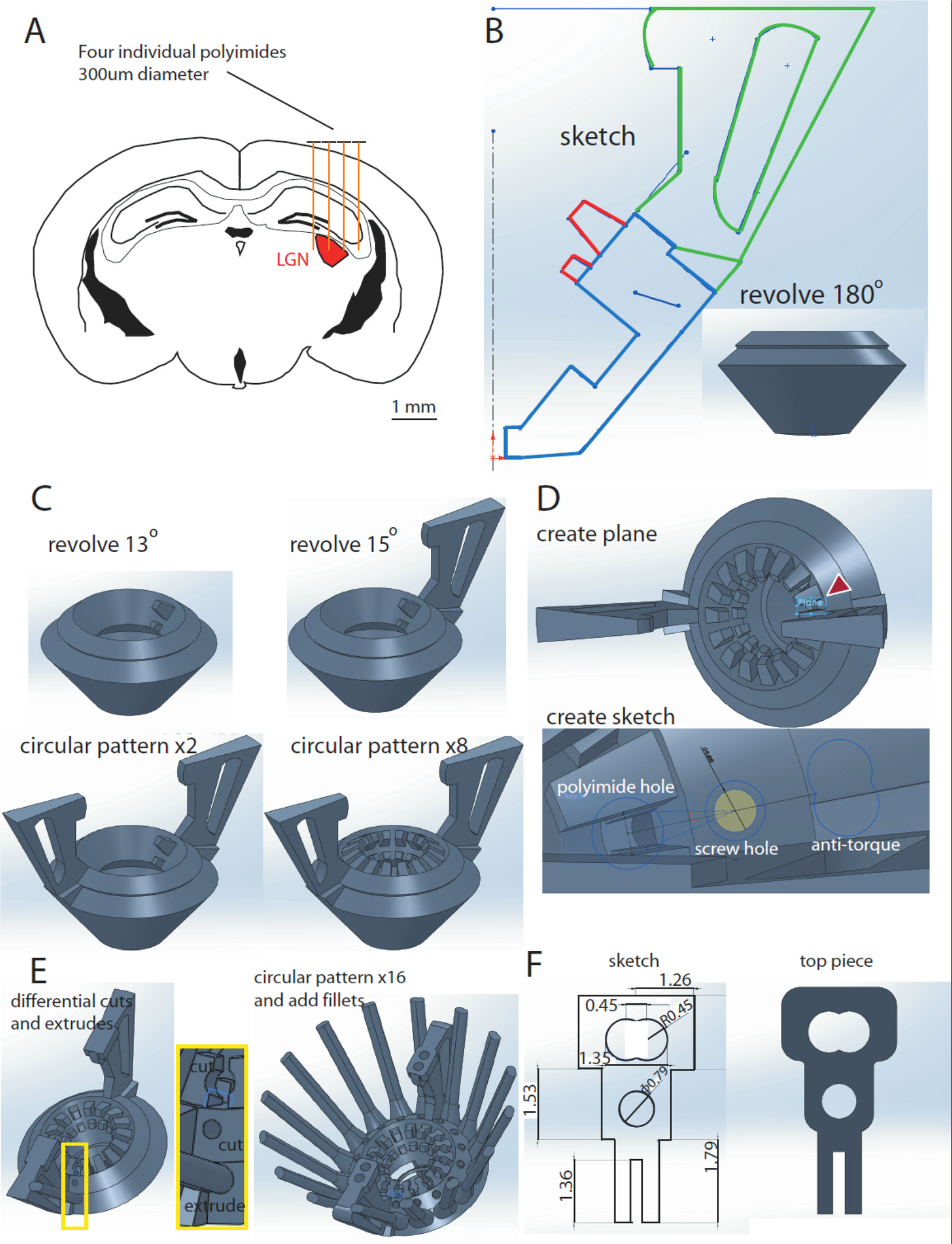
- Определите область мозга выбора (наружного коленчатого тела (LGN, визуальная таламуса)), прокручивая сагиттальной разделов электронного атласа мозга мыши.
- В координатах / P (-2,3 - -2.7 мм), ЛГН самая широкая. Используйте эту область для разработки привода дно (нижняя штук).
Примечание: В общей сложности 8 независимо друг от друга подвижных электродов могут быть использованы для целевой LGN (4-6 электродов будет делать это с LGN, 2-4 электроды добавили для компенсации ошибок имплантации фиг.1А). - В SolidWorks, нарисовать эскиз дизайна тела (Рисунок 1В) в передней плоскости. Нажмите эскиз, а затем использовать комбинацию прямых и кривых линий, чтобы нарисовать эскиз, который будет включать контуры для езды базовых, ручки и полиамид полусегментов, как показано. Убедитесь, что контур не содержит все открытые пробелы. Затем нажмите Выйти из эскиза.
- Затем выберите переднюю и правую самолеты, и нажмите "CreaТе Ось ". Тогда, создать модель 3D дизайн кузова, вращая подсвечиваются синим эскиза контура (рис 1B) 360 °. В меню функций, нажмите "вращалась Boss / Base". Выберите среднюю линию в качестве оси вращения. В разделе параметров, под руководством 1 нажмите Blind, и под углом выберите 360,00 град. В выбранном разделе контуров, убедитесь, что синий выделенный контур является одно соединение, выбранное.
- Создать один полиимидную полуинтервал путем вращения красным цветом контуры 13 ° (рисунок 1С, вверху слева). Шаги идентичны 1,4 выше спецификации угла, за исключением
- Создать один диск обрабатывает вращением зеленый контур 15 ° (Рисунок 1C, вверху справа).
- Создайте вторую ручку привода, используя круговую диаграмму функцию (Рисунок 1C, внизу слева). В меню функций, нажмите "Круговая Pattern". В параметрах выберите среднюю линию в качестве оси вращения. Выберите 180.00 град как угла, и 2 в качестве числа случаев. Убедитесь, что первый ручка выбран под "Особенности в шаблон".
- Создать шестнадцать полиимида полуслотах помощью круговой схеме функцию (Рисунок 1C, внизу слева). Выполните аналогичные движения до 1,7, но выбрать первый полиимидную полуинтервал как "Особенности в шаблон". Угол 22,5 ° и количество экземпляров являются 16 (Примечание: это всего 360 °, разделенные на количество раз вы хотите, чтобы картина функция)
- Создать новый самолет, на котором можно рисовать полиимидное сосуд. Добиться этого, нажав кнопку "Включить" в главном меню. Нажмите "Справочная геометрия", выберите две стороны полиимидных полусегментов, а затем нажмите кнопку "Создать новый самолет"; (Рисунок 1D, сверху)
- Создайте Microdrive емкость (резьбовое отверстие, Полиимиды отверстие и анти-крутящего момента рельс (Рисунок 1D, внизу). Достичь этого путем созданияэскиз, который охватывает все эти функции на новом самолете, созданной в 1,9. Заметим, что для рельсов анти-крутящего момента, определяют центральную линию между двумя сторонами полиамида лучших слотов. Затем нарисуйте рельсы анти-крутящего момента путем создания двух кругов перпендикулярно оси, чьи центры 1 радиус друг от друга, а затем обрезки средний контур.
- В меню Возможности, нажмите на кнопку "Выдавливание Boss / Base" для создания antitorque рельс и выбрать слепой выдавливания 10 мм, идущих вверх и 2 мм собирается вниз. Для резьбовое отверстие и полиимидной отверстие, нажмите на кнопку "Выдавливание разреза", и выберите слепой 6мм, и несколько ммс, идущие вверх для обоих (фиг.1Е, слева).
- Шаблон микро-диск емкость 16x, используя центр в качестве оси вращения (22,5 °, 16 случаях, равные интервалы), (Рисунок 1E, справа)
- На верхней части ручки, нарисовать 3 мм х 3 мм коробку, начиная с центральной кончика ручки привода, перед ЦентральнаяXis. Выдавите это 2 мм вверх, используя функцию "Выдавливание Boss". Нарисуйте круги диаметром 1 мм в местах, в которых винты EIB будет продолжаться. Потом, сделать 1,5 мм "Выдавливание Cut", чтобы сделать отверстие. Тогда, узор окно и отверстие в два раза с помощью функции Круговой массив (наложение текста: 180 °, 2 экземпляров, равные интервалы, о центральной оси).
- Использовать размеры (в миллиметрах) в рисунке 1F нарисовать верхнюю часть эскиз. Используйте "Extrude Boss / Base", чтобы сделать 3D-модель нем.
ПРИМЕЧАНИЕ: После этих шагов конструкция привода завершена. Тело физический диск создается в процессе стереолитографии. Есть ряд компаний, которые предлагают стереолитографии печать на основе STL файлов. Мы рекомендуем услуги, которые можно напечатать в твердой пластмассы (например, Accura® 55), с минимальным разрешением не менее 0,1 мм.
2 Получение HYPERDRIVE компонентов
- Разложите небольшой(: '. / 0116' ID / OD 0,0071 ''; Wall: 0,00225) кусок двухсторонней ленты на плоской поверхности и сократить необходимое количество 31 г полиимидных труб примерно 8 сантиметров (2А - 2В) .
- Выложите первый слой направляющих труб на двухсторонней ленты, заботясь, чтобы разместить направляющие втулки как можно ближе друг к другу на ленте. Dab небольшое количество тонких, цианакрилатного кле на слой полиимидов. (Фиг.2С)
- Быстро выложить второй слой полиимидов (Рисунок 2D).
- Создание волоконно-оптической заполнитель, используя 26 г канюли. Убедитесь, что это смазывается использованием основе тефлона смазку до включаются в сборке (Рисунок 2E).
- Нанесите линию эпоксидной 4-5 мм в длину перпендикулярно к полиимидной пучка (рис 2F). После того, как эпоксидная затвердеет (2-3 ч), удалите ее с нижнего слоя и РЭАPoxy другую сторону. После того, как эпоксидная снова затвердеет, 26 г канюли могут быть удалены, и конструкция разрезают посередине с помощью лезвия бритвы (рисунок 2G), в результате чего два полиимидных матриц, каждая из которых могут быть использованы для одного гипердвигателя (2H) Рис.
- Распечатайте шаблон конус на листе прозрачности бумаги и вырезать соответствующий лист тяжелой обязанностью алюминиевой фольги (3А - 3C).
- Нанесите слой эпоксидной смолы в алюминиевую фольгу и быстро применить прозрачность бумаги. Использование тяжелый предмет или деревянный дюбель, сгладить эпоксидные, чтобы он равномерно распределяется (Рисунок 3D).
- Вырежьте шаблон конус и зажать вместе, используя крокодил. Наконец, используйте другой прикосновение эпоксидной постоянно прикрепить куски (Рисунок 3E).
3 Final Ассамблея Microdrive
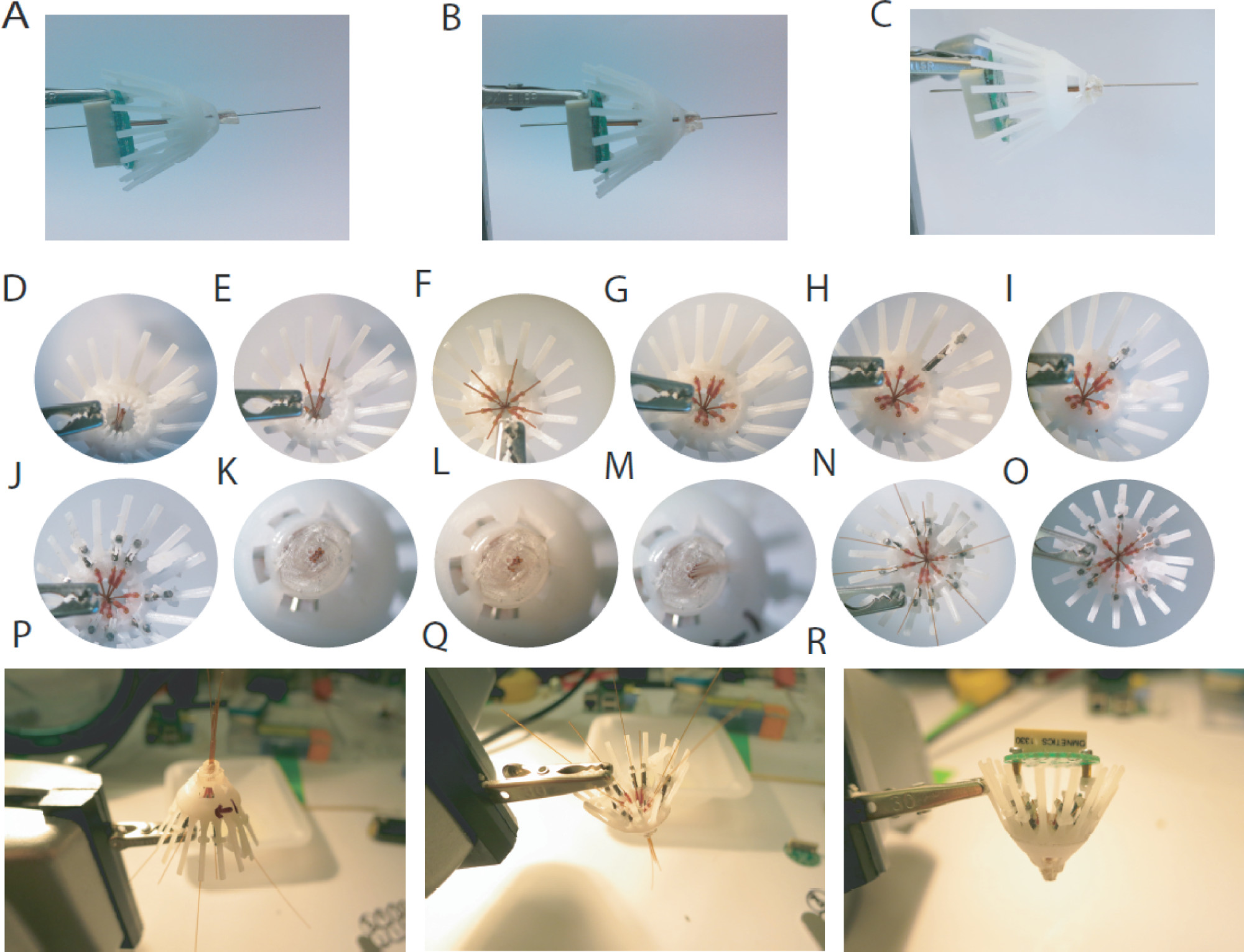
- Прикрепите ЕИБ к телу привода, И снова установите 26 G канюли через трубку матрицы полиимидная направляющей. Совместите полиимидную матрицу с телом привода с помощью волоконно-оптического отверстие в ЕИБ для того, чтобы направляющие трубки перпендикулярны ЕИБ и эпоксидные матрицы к корпусу привода заботясь, чтобы гарантировать, что ни эпоксидной не впадает в направляющих труб или в привод тело (4А - 4C).
- Карта каждую направляющую трубку в полиимидной матрицы к соответствующему кронштейну на внутренней стенке корпуса привода. Авто небольшое кольцо 33 г полиимида над каждой направляющей трубки и в кронштейн и применять небольшое количество цианакрилатного клей, чтобы прикрепить каждую направляющую трубку. (Цифры 4D - 4E) Наконец, эпоксидные весь аппарат к внутренней стенке корпуса привода и сократить полиимиды, так что они выступают чуть выше (4F фигуры - 4G) внутренней кромкой.
- Построить Microdrive сборку, поставив один из пользовательского-бУилт винты через центральное отверстие в верхней части с последующим одной из мм пружин 5. Наденьте внешнюю дыру верхнего куска над одним из рельсов, и осторожно водить винт. Заверните винт до весны не достигнет это минимальная сжатого длина. (Цифры 4H - 4I) Повторите эту процедуру для каждой железнодорожной станции / Microdrive (Рисунок 4J).
- Поверните дисковый массив с ног на голову и сфотографировать матрицы направляющей трубки. Эта картина будет использоваться для отображения местоположения направляющей трубы, соответствующей каждому микроприводом (Рисунок 4K).
- Вставка полиимидной трубки (0,005 ') в каждой направляющей трубки из нижней части приводного базы. Пусть несущая трубка расширить на 1-2 мм от верхней части полностью опущенном микроприводом и записи на фотографии идентичности соответствующего микро-диске. (Цифры 4L - 4М)
- Эпоксидные полиимидное трубку к Microdrive поддержку, заботясь, чтобы не лет эпоксидной запустить через микроприводом на весенней или винта (рис 4N, 4P - 4 квартал).
- Полностью опустите все Microdrives. Вырезать все полиимидные трубки выключения флеш в нижней части полиимидной матрицы (рис 4o).
- Установите интерфейса электрод доска с приводным базы с использованием двух # 00-90 х 3/16 '' винты (Рисунок 4R).
ПРИМЕЧАНИЕ: На этом этапе массив привод готов к загрузке с stereotrodes или тетродах. Для получения дополнительной информации по строительству Тетрод и погрузки, смотрите 10. Печатная база езды и микродиски были разработаны в SolidWorks 2011 3D CAD ПО: Ссылка для скачивания файлов SolidWorks. - После загрузки, инвертировать диск и аккуратно опустите защитный конус над диске, так что только нижняя часть выступает. Прикрепите защитный конус epoxying конус к телу привода.
- После конус прикреплен, полоса небольшой длиныпроволока из нержавеющей стали (0,008 '' Голый, 0,011 '' с покрытием) и контактный ЕИБ. Потрите внутренний, алюминиевый часть конуса с иглой и заземлить стальную проволоку к конусу с помощью серебряной краски. После того, как серебряная краска высохнет, укрепить с прикосновением эпоксидной смолой. Кроме того, стальной проволоки непосредственно могут быть присоединены к конусу с прикосновением проводящей эпоксидной (МГ Chemicals, Суррей, Канада).
Результаты
Имплантат строительство это процесс, который начинается с разработки 3D-печатных гипердвигатель (рисунок 1), перейти к построению в нижнюю часть (Рисунок 2), экранирование конус (Рисунок 3), и окончательная сборка гипердвигатель, по индивидуальное строительство из микродрайвы (Рисунок 4). Эти этапы следует загрузке Microdrives с электродами (10 см). После этого шага, можно использовать эти устройства для записи с нескольких областях мозга. На рисунке 5, пример следы от одновременной записи латерального коленчатого тела (LGN) и гиппокампа (HPC) показаны. Стабильность отдельных блоков, показанных на фиг.5В был замечательным, показывающий последовательные сигналов через течение нескольких дней. Эти нейроны было доказано, что LGN нейроны, будучи в ответ на светоизлучающий диод стимуляции, как показаноperistimulus время гистограмма (PSTH) на рисунке 5С. В этом же препарате, HPC местный потенциал поля был записан в качестве прокси для поведенческий статус. Эти следы показали острые волны рябь (Рисунок 5D), в ходе поведенческого покоя, в соответствии с их гиппокампа происхождения.

Рис.1 Проектирование гипердвигатель в Solidworks. А. Схема корональной части мозга мыши в A / P координаты -2,3 - -2.7 мм от темени. Четыре отдельные полиимидов (300 мкм) рисуются выше коры, иллюстрирующий адресности регионе LGN (красный) с электродами. Б. Эскиз дизайна тела. Оборотный синий контур 180 ° приводит к модели тела 3D дизайна (вставка). C. Добавление полиимидных слотов и привода ручки с проектной тела. Оборотный красную Highlighted контуры в B по 13 ° результатов в полиимидной полуинтервалом (вверху слева). Один диск ручка добавляется путем вращения зеленый контур в B на 15 ° (вверху справа). Вторая ручка добавляется с помощью функции круговой схеме (внизу слева). Эта же функция может быть использована для создания 16 полиимидных половиной слота (внизу справа). D. новый самолет будет добавлен в дизайне (вверху), что позволяет создать новый эскиз для Microdrive сосуда, состоящий из резьбовое отверстие, полиимиды отверстие и antitorque железнодорожных (внизу). Е. Эти функции будут реализованы в конструкции, используя нарезанные и выдавливания функции и вращалась на 360 °, чтобы создать 16 сосудов. F. Размеры верхнего куска эскиза (слева) и 3D-модели (право ). Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}

Рисунок 2 Подготовка нижнюю часть гипердвигатель. А. Первый полиимидная трубка помещается на двухсторонней ленты. B. Последующие пробирки помещают по отдельности, стараясь свести к минимуму пространство между трубами. C. После первого слоя выкладывается , тонкий слой клея цианакрилатного применяется D. второй слой полиимидов добавляют быстро, пока клей сушат. Е. В верхней части пучка полиимиды, 26 г канюли добавляют в качестве заполнителя для оптического волокна. F . Вся конструкция надежно фиксируется с каплей эпоксидной смолой. Г. После удаления канюли, конструкция могут быть сокращены в середине с лезвием бритвы, уступая два одинаковых нижние части. H. Фото на поверхности среза отделкой Нижняя часть, иллюстрирующие две двойные ряды четырех полиимидови отверстие для оптического волокна. Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}

Рисунок 3 Сборка гипердвигатель. А. полиимида матрица вставлен в корпус привода, и совмещена с электронным интерфейсной платы (EIB) с использованием 26 г канюли. Б. небольшое количество эпоксидной смолы используется для прикрепления polyimid матрицу, чтобы привод тело. C. Второй слой эпоксидной смолы может быть необходимо, после чего избыток эпоксидной следует dremeled от Д. Вид сверху на корпусе привода с матрицей вставленной. Е. С помощью небольшой кусок 33 G полиимидной труб, наружный направляющие трубки крепятся в соответствующие пазы тела привода. Ф. Все внешние направляющие трубки должны быть сопоставлены с рельс, заботясь, чтобы свести к минимуму напряженность на трубах. Г. После все внешние направляющие трубки отображаются, они должны быть закреплены с эпоксидной смолой и сократить чуть выше внутренней губой. H. микродисков в сборе, состоящий из заказного винт, мм пружины 5 и верхней части должны быть собраны и размещены над рельсом, соответствующего одной из направляющих труб. I. Каждый микродрайв сборка должна быть тщательно ввинчивается в корпус привода. J. После сборки каждый направляющая трубка должна иметь соответствующий микродисков К. вид снизу полиимидная матрица L. - М.. Полиимидные трубки (0,005 ") вставляются в каждом внешнем направляющей трубки. Н. Каждый внутренний направляющая трубка должна плотно прилегать к развилке из это соответствующие микродисков. О. Внутренние полимидные трубки крепятся эпоксидным к соответствующему микроприводом исократить как можно короче. После того как все внутренние направляющие каналы эпоксидной смолой, внутренние направляющие трубки, выступающие из полиимидной матрицы должны быть сокращены на одном уровне с матрицы губы. П. Перевернутый макро вид привода во внутренней загрузка направляющей трубки. Q. Топ макро вид привода во внутренней загрузка направляющей трубки. Р. Полностью собранный гипердвигатель с ЕИБ прикрепленный, готовый к загрузке с электродами. Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}

. Рис.4 Подготовка экранирования конус шаблон А. конуса печатается на прозрачной бумаге B -. D. Лист алюминиевой фольги приклеен к шаблону с использованием тонкий слой эпоксидной смолы. Е. < / Сильный> После вырезания шаблона, конус формируется и склеивается эпоксидной смолой.

Рисунок 5 Multi-сайт записи, используя сверхлегкие веса гипердвигатель. A. Изображение свободно ведет себя мышь с гипердвигатель имплантированы. В. Примеры две единый блок формы волны записи с этой мыши. C. Влево, Корональные части мозга мыши подсветки латерального коленчатого тела, где некоторые из электродов пониженной. Право, пример peristimulus времени гистограммы (PSTHs) двух нейронов LGN, приведенный в соответствие визуальной стимуляции (желтые). D. Право, корональной раздел выделив гиппокамп (HPC), где были снижены еще один набор электродов. Право, Пример локального поля потенциального записи гиппокампа рябь (Красная подсветка).

Рисунок 6 Обзор компонентов привода. (Левый) Комплексный обзор HYPERDRIVE компонентов. (Справа) Иллюстрация па индивидуальный Микродиск сборки.
Обсуждение
Этот протокол описывает процесс построения сверхлегким Microdrive массив для ориентации одного или нескольких регионов мозга у мышей. После заключительных этапах строительства, гиперпривод готов быть имплантированы с использованием стандартных методов хирургической имплантации и прикреплены к черепу мыши с зубным цементом. Сообщение имплантация, электроды могут друг быть высказаны независимо с помощью небольшой отвертки, в то время как мыши сдерживается стороны. Расстояние в свою очередь, что каждый электрод средства, определяется шагом винта. С помощью винтов, на которые ссылается здесь продвигается каждый электрод около 150 мм в свою очередь, хотя половина и четверть-повороты могут быть использованы для более высоким разрешением.
Размеры эскиза в рисунке 1b определить общий размер имплантата, поэтому, очевидно, способ масштабирования имплантатов в двух направлениях, чтобы изменить размеры на этом критическом очерке. Кроме того, гоэ длина винтов может быть продлен до целевой глубокие структуры мозга. Мы рекомендуем заказ титановые винты, как те легкие и менее хрупкие, чем сталь. Обратите внимание, что antitorque рельсы необходимо масштабировать линейно с длиной шнека, и в этот момент мы не определили максимальную длину, при которой эти структуры могут быть напечатаны. Для цели несколько областей мозга, форма нижней части может быть изменен. Добавление известных размеров шайб (толщиной 200 мкм), может обеспечить необходимые распорки между полиимидов, ориентированных на отдельные структуры головного мозга (например, гиппокампе и префронтальной коры). Они могут быть включены в нижней части этапов сборки, а затем отрезали после того, как эпоксидная затвердевает.
Большой ограничение этой конструкции является ее зависимость от проприетарного программного обеспечения (SolidWorks в данном случае). Дальнейшее развитие программ с открытым кодом, которые обеспечивают удобный для пользователя интерфейс способствует разработке такого оборудования с минимальным инженерной backgкруглый бы огромную пользу в области нейронаук сообщества.
Этот способ имеет несколько преимуществ по сравнению с существующими методами. Во-первых, дизайн прост, зависит от очень немногих эскизов (рисунок 1). Во-вторых, это ультра-легкий, не требующий стоматологического цемента или тяжелый материал, чтобы войти в его сборки. В целом, он весит около 1,7 г - почти треть веса коммерчески доступных имплантатов аналогичной функциональностью. В-третьих, она не требует специального оборудования, чтобы сделать - тело имплантата может быть 3D напечатаны из нескольких источников (например approto.com, но есть несколько других); винты может быть на заказ (например antrinonline.com); пружины являются коммерчески доступными (например, leesprings.com); и в результате весь процесс сборки может произойти в день. Наконец, эти имплантаты были использованы для записи с нескольких областях мозга при естественном кормлении, структурированные поведенческие задачи и сна (Рисунок5).
Будущие приложения этого метода включают реализации своей масштабируемости. Вполне вероятно, что имплантат можно в двух направлениях масштабируется просто изменив 1) размер эскиза в рисунке 1b и, 2) количество Microdrive сосудов (Рисунок 1D) с рисунком. Например, его можно масштабировать вниз к записи свободно ведут себя мышей на ранней стадии развития, и постепенное расширение масштаба для записи от крыс, кроликов, хорьков и, возможно, приматов.
Заключительное слово, чтобы напомнить читателю, что решающее значение для успешной реализации намеченной метода является прототип никаких изменений они реализуют в .stl дизайна вложений. Читатель заметит, например, что придает конструкции содержит "фигура 8" antitorque рельс. Это был лучший дизайн возможно, учитывая ограничение 3D-печати, как это часто требуется, чтобы мы просверлить эти отверстия. Имея это окружность, будут аккомпанироватьromise стабильность, но иметь его быть квадратной или прямоугольная форма будет ограничивать способность фиксировать 3D несовершенства печати бурением.
Раскрытие информации
Авторы не имеют ничего раскрывать.
Благодарности
We thank members of the Wilson lab for their helpful advice on the fabrication method.
This work was supported by the Simons Foundation, a NIH pathway to independence career award from the NINDS and a NARSAD Young Investigator Award (to M.M.H.) as well as grants from the NIH (to M.A.W.).
Материалы
| Name | Company | Catalog Number | Comments |
| Microdrive screws | Antrin | Half Circle 0.6 UNM Titanium Screws. 8 mm thread. 9 mm length from under head. | |
| Tap-ease | AGS CO. | #TA2 | Tapping Grease |
| Microdrives | See .STL file | ||
| Drive Body | See .STL file | ||
| Outer Polyimide Guide Tube | Minvasive Components | IWG Item # 72113300022-012 | Length: 12’’, ID: 0.0071’’, OD: 0.0116’’, WALL: 0.00225’’ |
| Inner Polyimide Guide Tube | Minvasive Components | IWG Item # 72113900001-012 | Length: 12’’, ID: 0.0035’’, OD: 0.0055’’, WALL: 0.001’’ |
| Grounding Wire | A-M Systems, Inc. | Catalog # 791900 | 0.008'' Bare, 0.011'' Coated |
| Tri-Flow | Teflon based lubricant - Aerosol | ||
| Microdrive Springs | Lee Spring | Part # CB0050B 07 E | Outside Diameter: 1.016 mm, Hole Diameter: 1.193 mm, Wire Diameter: 0.127 mm, Free Length: 10.160 mm, Solid Length: 3.581 mm |
| Z-poxy 5 Minute | Pacer Technology (Zap) | PT37 | |
| Silver Paint | GC Electronics | Part #: 22-023 | Silver Print II |
| Tri-Flow | 20009 | ||
| 26 G Hypodermic Tube - Stainless Steel | Small Parts | HTXX-26T-12-10 | Length: 12’’, ID: 0.012’’, OD: 0.018’’ |
| EIB screws | Component Supply Co. | MX-0090-03SP | #00-90 x 3/16’’ |
| Fine Scissors - Toughcut | Fine Science Tools | 14058-09 | 22 mm |
| Transparency Paper | 3M | PP2500 | |
| Aluminum Foil | Reynold's Wrap Heavy Duty | Extra Thick |
Ссылки
- Boyden, E. S., Zhang, F., Bamberg, E., Nagel, G., Deisseroth, K. Millisecond-timescale, genetically targeted optical control of neural activity. Nat Neurosci. 8, 1263-1268 (2005).
- Fenno, L., Yizhar, O., Deisseroth, K. The development and application of optogenetics. Annu Rev Neurosci. 34, 389-412 (2011).
- Alexander, G. M., et al. Remote control of neuronal activity in transgenic mice expressing evolved G protein-coupled receptors. Neuron. 63, 27-39 (2009).
- Halassa, M. M., et al. Selective optical drive of thalamic reticular nucleus generates thalamic bursts and cortical spindles. Nat Neurosci. 14, 1118-1120 (2011).
- Tsien, J. Z., et al. Subregion- and cell type-restricted gene knockout in mouse brain. Cell. 87, 1317-1326 (1996).
- Nestler, E. J., Hyman, S. E. Animal models of neuropsychiatric disorders. Nat Neurosci. 13, 1161-1169 (2010).
- Collins, P. Y., et al. Grand challenges in global mental health. Nature. 475, 27-30 (2011).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Science. 261, 1055-1058 (1993).
- Wilson, M. A., McNaughton, B. L. Reactivation of hippocampal ensemble memories during sleep. Science. 265, 676-679 (1994).
- Nguyen, D. P., et al. Micro-drive array for chronic in vivo recording: tetrode assembly. J Vis Exp. (26), (2009).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены