
Method Article
ラットにおけるオブジェクト位置タスクを用いた被験者内実験計画
* これらの著者は同等に貢献しました
要約
このプロトコルは、同じラットのコホートを使用して 4 つの繰り返しを持つオブジェクトの場所タスクの詳細な手順を提供します。弱く、強いエンコーディングは、短期および長期の記憶を生成することができます。繰り返しプロトコルの柔軟性は、時間と労力を節約することによって外科手術を伴う研究のために有益であり得る。
要約
オブジェクトプレイス認識は、げっ歯類の空間記憶を調べる際に使用される顕著な方法です。このオブジェクト配置認識メモリは、オブジェクトの場所タスクの基礎を形成します。この論文は、同じコホートを使用して最大4回の繰り返しを選択して、物体位置タスクの確立を導く広範なプロトコルを提供する。弱いエンコーディングプロトコルと強いエンコーディングプロトコルの両方を使用して、様々な強度の短期および長期の空間記憶を研究し、関連するメモリ阻害または強化操作の実装を可能にすることができます。さらに、ここで提示されたカウンターバランスを伴う試験の繰り返しにより、被験者内比較のための2つ以上のテストの結果を組み合わせてラット間の変動性を減らすことができます。この方法は、統計的な力を高めるのに役立ち、特に個々の行動に大きなばらつきをもたらす実験を実行する場合に強く推奨されます。これにより、各動物から得られたデータを増やし、必要な動物の総数を減らすことで、研究を直接洗練します。最後に、反復的な対象位置タスクの実施は、時間と労力を節約することによって外科的処置を伴う研究の効率を高める。
概要
自然認識タスク(例えば、物体認識、物体位置認識)は、げっ歯類における記憶の調査において大いに利用されてきた。これらのテストは、恐怖のコンディショニングまたは報酬動機に基づく記憶を評価するために使用される様々なテストとは異なり、自発的認識タスクは新しい刺激に対する自発的な探索行動のみに基づいているという点で。この挙動は「ネオティック嗜好」1と呼ばれ、げっ歯類だけでなく、他の哺乳類種や鳥類や魚類などの哺乳類以外の動物類に内在する2。空間空間記憶に依存するオブジェクトプレイス認識は、オブジェクト位置タスク(空間オブジェクト認識タスクとも呼ばれます)3を使用して観察できます。病変の研究は、物体の場所認識が無傷の海馬4、5を必要とすることを示している。比較的単純なトレーニングプロトコルと補強の欠如のために、このタスクは、多くの研究で好ましいです。正と負の両方の補強の欠如は、行動を駆動する可能性のある追加のパラメータと脳領域を最小限に抑えます。したがって、ここでの動作は中立的であり、好奇心と空間記憶に基づいており、空間記憶のエンコード、統合、および検索に関与するメカニズムの調査が可能になります。
オブジェクトの場所のタスクのプロトコルは、通常、習慣化セッションと、エンコードとテストの試行の単一セッションで構成され、遅延期間で区切られ、数分から数時間に変化します。ラットは、動物のストレスレベルを最小限に抑えるために事前に取り扱うことを強くお勧めします, したがって、認識記憶に影響を与える可能性のある行動, 例えば、新規性に対する嫌悪感.同様に、適切に設計された習慣性プロトコルは、タスク中にラットの自然な行動を妨げる可能性のあるストレスを防ぐ上で不可欠な役割を果たします。しかし、取り扱いと習慣の程度は、実験室と実験者の間で大きく異なり、複製性が低い6、7、8に寄与する可能性がある。エンコードトライアルでは、ラットは2つの指定されたコーナーに位置する2つの同一のオブジェクトを持つアリーナを探索する時間を与えられます。期間遅れるテストトライアルでは、ラットは同じペアのオブジェクトでアリーナを探索する時間が与えられますが、今回はそれらの1つが新しい場所に移動されました。ラットが示した自発的な嗜好と、その結果、新しい場所での被オブジェクトの探索に費やされる時間の増加は、空間認識と物体位置の記憶を示す。エンコード試行の変更(繰り返しの持続時間と回数)は、メモリの強度に影響を与えます。
研究の目的に応じて、コード化と試験の間の遅延の長さは、タンパク合成に依存しない短期記憶またはタンパク合成依存性の長期記憶をモデル化するように変更することができる。したがって、必要に応じてプロトコルを適応させることによって、オブジェクトの位置タスクをさまざまな研究に使用できます。また、インビボイメージングと同様に、これらの試験の間には、薬理学的および光遺伝学的介入などの実験的操作の実施も可能である。同じラットコホート内のオブジェクト位置タスクの反復を報告する研究9,10がいくつかあります。これは、1匹の動物が繰り返しのない1つのセッションを持つ伝統的な使用とは対照的です。しかし、これらのパラダイムの有効性は十分に調査されておらず、また、これらを説明する方法文書もありません。私たちの知る限りでは、これは、同じラットコホートを使用して最大4回の繰り返しを持つオブジェクトの位置タスクを詳細に記述するプロトコルの最初の報告された説明であり、各繰り返しの結果を体系的に比較します。繰り返しは、実験条件のバランスを取り、テスト間の変動性を低減して被験者内比較を可能にするために使用できます。タスクの信頼性の高い繰り返しにより、データをプールすることができ、比較的少数のラットを使用して十分に大量のデータを生成することができます。最後に、同じラットを使用する繰り返しは、手術や移植を伴う実験において、必要なラットの数を減らすことで有益であり、その結果、時間と人件費を節約します。
この研究は、強いおよび弱いコード化試験を使用して成体ラットで物体位置タスクを実行し、その後1-hおよび24-hの遅延を伴う試験試験を行う方法を詳述する広範なプロトコルを提示する。強力な符号化プロトコルは、1-hおよび24-h遅延で試験された場合に統計的に有意な認識メモリを生成し、したがって、これらの記憶を阻害する操作の実施時に短期および長期記憶の両方を研究するために使用することができる11。一方、ウィークエンコーディングプロトコルは、1-h遅延でテストした場合に、有意な短期メモリのみを生成します。長期記憶の不在は、メモリ11、12の保持を強化するための操作を研究するために使用することができる。このプロトコルには、詳細な処理と習慣化セッションも含まれており、オブジェクトの場所タスクの複製性を高める目的で行われます。この論文はまた、弱い符号化プロトコルを使用してラットの同じコホートを持つ4つの異なる文脈におけるタスクの繰り返しを示し、毎回複製可能で一貫した結果を生み出すことが確認される。
プロトコル
ここに記載されているすべての方法は、デンマークとEUの動物福祉法に従って、デンマーク国家当局(ライセンス番号:2018-15-0201-01405)によって承認されています。
1. 実験的なセットアップと個別のコンテキストの準備
- コンテキストを持つオブジェクトの場所のアリーナ
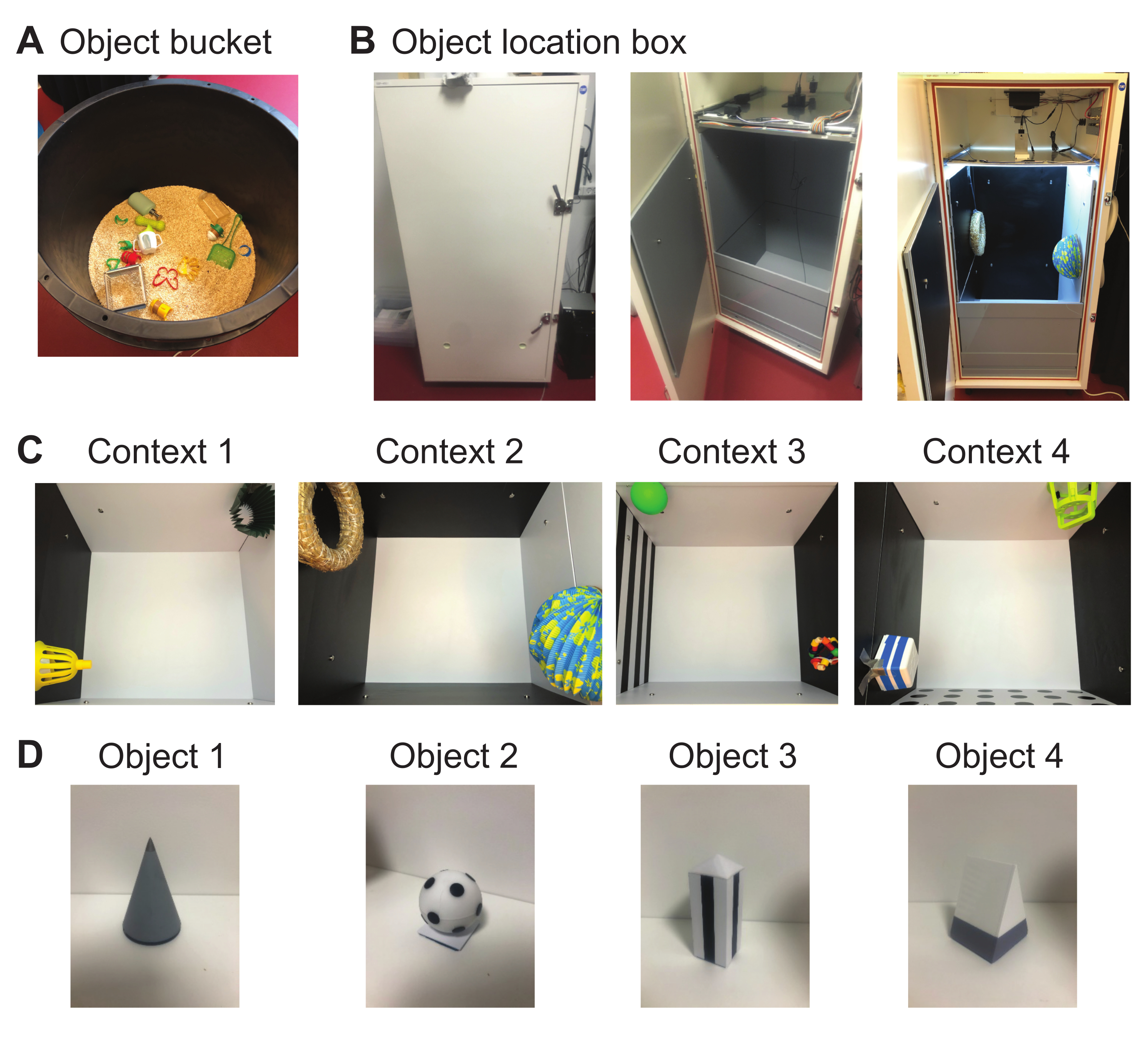
注: 以下の設定は、天井の端に沿って位置する光源とボックスの天井の中央にカメラを配置した、封入された防音ボックス(図1B)で示されています。高さ100cmの壁(図1B)を備えた60cm x 60cmのアリーナは、箱の中に置かれ、周囲の部屋から完全に隔離されています。すべての空間的な手掛かりはアリーナの中にあります。これにより、異なるコンテキストを作成するプロセスが簡略化されます。周囲の部屋からの分離の同様のレベルは、壁の周りに均一なカーテンで通常のオープンフィールドアリーナを囲むことによって達成することができます。- 不透明で非多孔質の硬質プラスチックで作られた正方形のアリーナを取得し、幅は60cm、高さは50cm以上です。自動ソフトウェアによるラットの動きを正常に記録するために、ラットの色と対照的な床の色を選択します(該当する場合)。アリーナをボックス (図 1B)の内側に置くか、カーテンで囲まれたプラットフォームに配置します。
- コンテキストを作成するには、挿入可能な壁の第2層(例えば、 アリーナと同じ材料で作られた壁被覆、または簡単にきれいにすることができるプラスチックの壁紙)を異なる色やパターン(例えば、 黒、白、ストライプ、ドット)で取得します。互いに区別されるように、アリーナに壁の第二層を挿入します。
- 次元が10 cm x 10 cm x 5 cmと20 cm x 15 cm x 15 cm (幅x長さx高さ)の間で変化し、(i)明確な幾何学的形状と(ii)壁の色を対比する色を持つ3次元(3D)空間的手掛かり(1-2)を得る。ネズミがこれらの手がかりに到達できないように十分な高い壁にそれらを掛けます。
- 非多孔性、チュアブル、およびクリーニングが容易な、異なるペアのオブジェクト(コンテキスト番号と同数)を取得します。新しいオブジェクトごとに、異なる幾何学的形状とテクスチャを持つことを目指します。幅と高さが 5 ~ 15 cm のオブジェクトを選択します (高いオブジェクトは避けます)。4 つの異なるオブジェクト (円錐、サッカー、長方形のプリズム、三角形のプリズム) の例については、 図 1D を参照してください。
注: 各オブジェクトは、すべてのオブジェクトの総探索時間が比較可能になるように、ラットと同様の関心を持つ必要があります。 - アリーナの床にオブジェクトを取り付けるための最良の解決策を見つけてください(例えば、スティッキーマット、両面テープ、オブジェクトの下に金属板を取り付け、アリーナの下にペアリングマグネットなどを取り付けます)。
- 別のコンテキストを作成する場合は、壁の色とパターンの分布を前のコンテキストと対比するような壁を再作成します。以前のすべてのキューとは異なり、対比する新しい 3D 空間キューを使用します。4 つの異なるコンテキストの例については 、図 1C を参照してください。
- アリーナ内で拡散し、等しい照明を確保し、調光オプションを持つ光源を取得します。各コンテキストを作成した後、アリーナの角で約100〜120ルクスに光の強度を調整します。カメラを入手し、ボックスの天井の中央に配置します。
注: 自動スコアリング ソフトウェアが使用されていない場合、光強度は低いレベルに調整できます。
- オブジェクトバケット
- バケット(直径50cm>)を取得します。実験場に似ないように正方形の形状を選択しないでください。寝具で満たします。
- さまざまな形状とサイズの 5 ~ 10 個のオブジェクト (実験で使用するオブジェクトとは異なるオブジェクト) を取得し、それらをすべてバケットにランダムに配置します (図 1A)。

図1: 4 つの異なるコンテキストとオブジェクトを含む実験的なセットアップ。 (A) オブジェクトの習慣化のためのオブジェクトバケット。(B)実験装置(左)は、対象位置アリーナ、カメラ、光源を囲む。コンテキスト設定前の実験的なボックスとアリーナ (中央) とコンテキスト設定 (右) を持つアリーナ。(C)壁の色とパターンが異なる 4 つのコンテキスト (1- 4) と、3 次元の空間的手掛かり。(D) コンテキスト 1 ~ 4 でそれぞれ使用される 4 つのオブジェクト。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- カメラおよびトラッキングソフトウェア(オプション)
- カメラレコーダーを遠隔操作し、ラットの鼻を追跡できるソフトウェアを入手します。各実験の前に、特定のコンテキストとラット株ごとにソフトウェア調整を行います。
- オブジェクト位置と実験グループのカウンターバランス
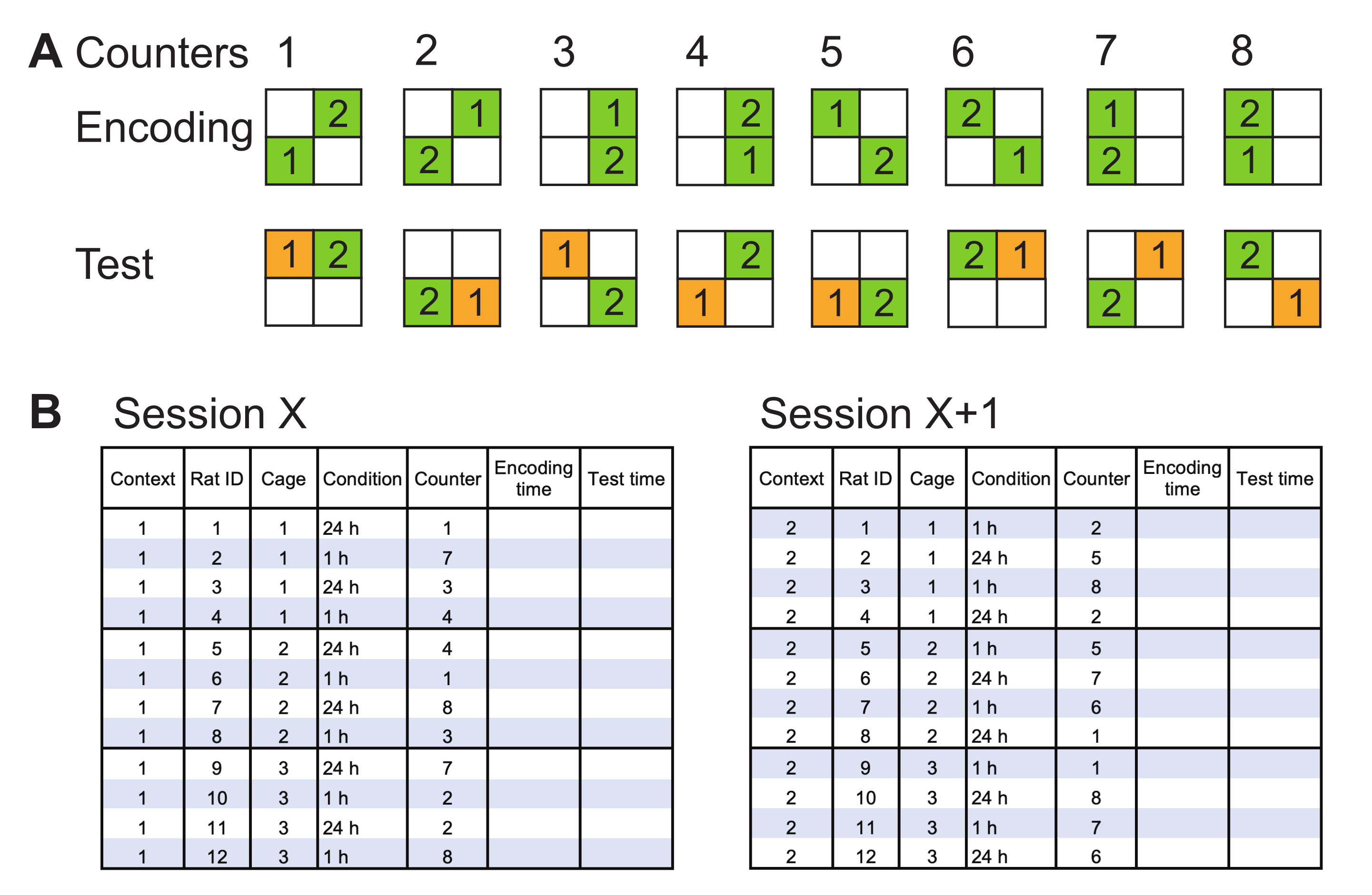
- エンコードとテストの試行のためにオブジェクトの場所の可能な組み合わせを準備し、カウンタとして名前を付けます。すべてのコーナーをオブジェクトの位置としてカバーし、隣接する角から対角コーナー、またはその逆のオブジェクトの動きをカバーするように、組み合わせを作成します(図 2A)。
- 特定の実験のスケジュールを準備し、1つの実験群の各ラットをカウンターと一致させる。十分なラットがある場合は、ペアになっている 2 つのカウンターの各ペア (図 2A)を 1 つのグループ内で使用します。両方の実験グループに対して同じカウンタセットを 1 つのエンコーディング/テスト セッションで使用します (図 2B)。次のセッション (つまり、 新しいコンテキスト) のカウンタを再割り当てします。
注:エンコード/テストセッション中にラットを混合順序で実行します(例えば、1つのケージ内のすべてのラットを次々と実行するのではなく、ケージを回転させて、複数のラットのケージ内の穏やかな環境を確保します)。 - 実験群に対抗するために2つ以上のコンテキストを使用する場合(例えば、1-hメモリ対24-hメモリ群)、ラットを各グループに割り当て、以下のコンテキストでグループを変更する(図2B)。

図2: 代表的なカウンターバランス方法: (A) エンコーディングおよびテスト試行時のアリーナ内のオブジェクトの向きは、カウンタとして命名されています。オブジェクト 1 は常に移動オブジェクトです。2 つのカウンタは、移動中のオブジェクトの場所が変更されるように、バランスが取れ合います。各コーナーは 2 回占有され、オブジェクト 1 は対角から隣接に移動され、その逆も同じ回数だけ移動します。(B) 2 つのカウンターバランス セッションのエンコード/テスト スケジュールの例 (例:コンテキスト 1 と 2)。ラットは、コンテキスト1(セッションX、左)において実験条件に割り当てられる。カウンターペアのセット(すなわち、1-2、3-4、5-6、および7-8)が選択され、1つの実験群の各ラットに割り当てられる。同じカウンターのセットが両方の実験群のラットに割り当てられます。コンテキスト 2 (セッション X+1; 右) の次のセッションでは、実験グループ内のラットがカウンターバランスのために変更され、カウンターペアの新しいセットが割り当てられます。エンコードとテストの試行の開始時の時間は注意が必要です。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
注: このプロトコルのすべての処理、習慣、およびエンコード/テスト セッションは、12 時間の明暗サイクルの明るい段階で最適化されました。
2. 取り扱いと習慣
- 離うめき(ラットが自宅で飼育されている場合)または実験開始の2〜3週間前(ラットが到着後1週間順応した後、外部施設から注文された場合)から始まるラットの取り扱いを開始します。
- ラットが快適に触れて実験者に拾われるまで、週に2〜3日間、4匹のラットの各ケージに少なくとも10〜15分を費やします。ケージ内のラットの数に応じて、ケージごとに割り当てられる時間を調整します。
注:ラットとの作業を期待するすべての実験者が取り扱い中に存在することが重要です。 - 引き分けから処理が始まる場合は、このレベルに達した後で処理を最小限に抑えます(オプション)。実験の2~3週間前に開始する場合は、常習セッションの開始まで取り扱いを続けます。
- ラットをケージに入れて実験室に連れて行き、ラットを輸送だけでなく実験室に習慣化します。ラットは、彼らに落ち着いて習慣化する時間を与えるために、少なくとも30分間座ることを許可します。この時間の後、ラット/ケージをハウジングルームに戻します。
注: ステップ 2.4 は、処理と組み合わせて、必要に応じて何度でも繰り返すことができます。プロトコルにこれ以上の操作(例えば、 注射の手順の処理など)が含まれている場合、このステップで追加の習慣を実装することができます。 - ラットを習慣化して、オブジェクトと相互作用し、新しい環境の経験に起因する一般的なストレスレベルを低減するために、オブジェクトの習慣化を実行します。
- セッション1では、すべてのホームケージを実験室に持ち込み、ラットを習慣化して部屋に入れ、少なくとも30分間落ち着かせる。同じケージからラット(2〜4匹)をバケツに20分間入れます。ラットの各グループ間の任意の便の物質を除去することによって、バケツをきれいにします。すべてのケージに対して手順を繰り返します。すべてのネズミを自宅のケージに入れ、住宅室に戻ります。
- セッション2の場合、別の日にすべてのケージを実験室に持ち込み、少なくとも30分間放置します。各ラットを10分間バケツに入れます。ラットをホームケージに戻し、各ラットの後にバケツをきれいにします。すべてのケージをハウジングルームに戻します。
- セッション 3 の場合は、別の日にステップ 2.5.2 を繰り返します。
- 実験装置が囲まれた箱(図1B)である場合、新しい実験装置にラットを慣らすために空箱の習慣化を行うことを選ぶ。セッション4では、すべてのケージを実験室に持ち込み、少なくとも30分間放置します。同じケージ(2-4ラット)のラットを、文脈や空間的な手掛かりのない空のアリーナ(図1B、中央)に20分間一緒に置きます。すべてのラットをホームケージに戻し、ラットの各群の後に70%エタノールでアリーナを拭きます。
注: ステップ 2.5 と 2.6 は、コンテキストの習慣週の前に 1 週間で実行する必要があります (ステップ 2.7; 図 3を参照)。これらのステップの間に数日間の休憩は許容されます。ただし、ステップ 2.7 を開始した後、各ステップは、テスト試行の終了まで、指定された連続した日に実行する必要があります (ステップ 2.9)。 - 一般的なストレスレベルを低減し、環境の空間学習をサポートするために、コンテキストと3Dキューにラットを習慣化するコンテキストの習慣化を実行します。
- セクション 1.1 で説明したように最初のコンテキストを作成するために空のアリーナを変更しますが、オブジェクトをアリーナに配置しないでください。録音装置を準備します。
- セッション1の場合は、すべてのケージを実験室に持ち込み、少なくとも30分間放置します。手動で実行する場合は、レコーダーを起動します。アリーナの中央に最初のネズミを置き、ラットが10分間アリーナを探索できるようにします。次に、レコーダーを停止し(手動の場合)、ラットをホームケージに戻します。各ラットの後に70%エタノールで十分にアリーナを拭き、終了したらすべてのケージをハウジングルームに戻します。
- セッション 2 と 3 の場合、ラット 1 匹につき 3 セッションのコンテキスト習慣が合計になるように、2 日間連続して各ラットに対してステップ 2.7.2 を繰り返します。
注:特に大きなグループを扱う場合は、ラットがアリーナに入る順序をシャッフルすることを検討してください。これにより、特定のラットを1日の同じ時間に繰り返し実行するのを避けます。

図3: 処理、習慣、オブジェクト位置タスクプロトコルを含む行動実験の設計 ラットは、習慣週の数週間前から定期的に取り扱われるべきです。第0週では、オブジェクトと実験的なボックスの習慣化は、その間に少なくとも24時間の間隔で4回にわたって行われます。第1週では、コンテキストの習慣化は、24-時間間隔で3回連続セッションを行い、続いてエンコードおよびテスト試験を行う。最低48時間と最大1週間の間隔で次のセッションを進める前に(例えば、 第2週または3週の次のコンテキストへの慣れ開始)。略語:ハブ、習慣。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- エンコードトライアル (セッション 4)
注:薬理学的操作の場合、薬理学的薬剤の性質に応じて、薬理学的試薬の前または直後および/または試験試験の前に、薬理学的操作を投与する合理的な時間をすることができます。- すべてのケージを実験室に持ち込み、少なくとも30分間放置します。事前に用意したスケジュール(図2B)を使用して、スティッキーマットまたは両面テープを使用して、指定された場所(2つのコーナーと各壁から>10cmの距離)に最初の同一のオブジェクトのペアを配置します。
- レコーダーを起動します (手動の場合)。アリーナの最初のラットを、どのオブジェクトにも占有されていない壁またはコーナーに面して配置します(各オブジェクトと等しい距離)。
注: 弱いエンコードまたは強力なエンコードについては、次の手順に従います。 - ウィークエンコーディング(1トライアル)の場合、ラットはアリーナとオブジェクトを20分間探索できるようにします。次に、レコーダーを停止し(手動の場合)、ラットをホームケージに戻します。オブジェクトを取り除き、70%エタノールでオブジェクトとアリーナの両方を徹底的に拭きます。
- 各ラットが20分の1コード試験を受け取るように、すべてのラットに対してステップ2.8.3を繰り返します。
- 強い符号化(3つの試練)のために、ラットはアリーナとオブジェクトを5分間探索することを許可する。次に、レコーダーを停止し(手動の場合)、ラットをホームケージに戻します。オブジェクトを削除しないでください。70%エタノールでアリーナとオブジェクトを拭きます。
- 同じラットでさらにステップ2.8.5を2回繰り返し、合計で3回の試験があります。時間が切れたら、ネズミをホームケージに戻します。徹底的な洗浄のためにオブジェクトを取り除き、70%エタノールでオブジェクトとアリーナを拭きます。
注意: ラットの試用間隔は約1~2分です。 - 各ラットについて、ステップ 2.8.5~ 2.8.6 を繰り返します。
- 遅延時間が24時間より短い場合は、試験試験までケージを実験室に保管してください。それ以下の場合は、完了したらすべてのケージをハウジングルームに戻します。
- テストトライアル (セッション 4)
注: 遅延期間は、エンコード試行の最初からカウントする必要があります。- 24時間の遅延(またはテストトライアルを次の日に行う必要がある遅延)の場合は、すべてのケージを実験室に持ち込み、ラットを少なくとも30分間放置できるように、最初のテストの前に十分な時間を残します。スケジュールに従って、オブジェクトを指定された場所(オブジェクトの 1 つを新しい場所)に配置します。
- 時間になったら、レコーダーを起動します(手動の場合)。アリーナの最初のラットを、どのオブジェクトにも占有されていない壁またはコーナーに面して配置します(各オブジェクトと等しい距離)。
- ラットがアリーナとオブジェクトを5分間探索できるようにします。次に、レコーダーを停止します(手動の場合)。ネズミをホームケージに戻します。オブジェクトを取り除き、70%エタノールでオブジェクトとアリーナの両方を徹底的に拭きます。
- 各ラットについて、手順 2.9.2 ~ 2.9.3 を繰り返します。すべてのケージを住宅室に戻します。
注:次の各エンコーディング/テストセッションでは、少なくとも48時間と1週間の間隔の後に、ステップ2.7(コンテキストの習慣)から習慣プロトコルを開始します。
3. データ分析
- 各ラットについて、この目的のために設計されたソフトウェアを使用するか、手動セットアップを使用して、エンコード試行とテストトライアルの両方で各オブジェクトの探査時間をスコア付けします。全体の期間のエンコード試行をスコア付けします。最高の差別パフォーマンス3のための2分のスコアテスト試験。自動オンライン ソフトウェア スコアリングを使用する場合は、ソフトウェアからスコアリング データをエクスポートします。
- ラットがオブジェクトに接触しているとき、オブジェクトをスニッフィングするか、2 cm 未満の距離でオブジェクトに向いているときに探索時間をカウントします。ネズミの注意が物体以外の場所にあるように見える(例えば、 物体から離れている)場合を除き、探検としてオブジェクトの上に登って座ることを含める。
- 各ラットの両方のオブジェクトの合計探索時間を計算します。信頼性の低い探査を反映する可能性があるため、テストトライアルで合計探査時間が10 s未満のラット(2分スコアリング)を除外することを検討してください。
- 各ラット(式2)の各オブジェクト(式1)または識別指数(DI)の探索の割合を計算し、グループの平均値を計算します。
 (1)
(1)
注: % 探査が 50% または DI が 0 の場合、パフォーマンスが偶然レベルにあり、どちらのオブジェクトにも対する好みはありません。エンコード試行中の平均パーセンテージの探索と DI は、それぞれ~50% または 0 である必要があります。符号化試行においていずれかの対象に対する[平均±(2×SD)]より高い好みを示す任意のラットは、それぞれの検定の分析から除外されるべきである。これにより、安定した物体位置の記憶としてテストトライアルでの嗜好の信頼性の高い解釈が可能になります。この値は、個々のテストまたは複数のテストからの結合エンコード データについて計算できます。 - 実験の設定に最適な方法でデータを分析します。1 サンプルの t-testを使用して、偶然レベルより上位の優先を検出します。
- カウンターバランスを使用して複数のコンテキストを使用している間、コンテキスト間で同じ実験条件の結果を結合します。
注: この結果、同じラットから構成されるグループが作成され、2 つのグループに対してペアの t-testを使用して被験者内比較が可能になり、2 つ以上のグループに対して分散の反復測定分析 (ANOVA) が使用されます。
結果
ここに示されているのは、雄のチロシンヒドロキシラーゼ(Th)-Creトランスジェニックラット13を用いて説明した強いコードプロトコルと弱い両方のコードプロトコルの代表的な結果であり、長いエバンス株を有する13 は、リスターフード株および野生型リスターフードラットに4回裏越しした。このラット株として使用されたTh-Creトランスジェニックラットは、光遺伝学を含む将来の研究で使用される。各プロトコルを使用して、メモリは1と24時間の遅延でテストされました。1時間のテストは短期記憶を示し、24-hテストは長期記憶を実証する。エンコード設定の除外値は、プロトコルで説明されているように計算され、5つのテスト(強いエンコーディングプロトコルと弱いエンコーディングプロトコル)の組み合わせデータを[50.8%±(2×10.8%)]として使用しました。これらの値の上下に符号化好みを有するラットは、それぞれの検定の分析から除外された。
強力な符号化実験では、16匹のラットを用い、弱い符号化実験のためには19匹のラットを用いた。強力なエンコード試行中 (3 × 5 分エンコード;図4A)は、どちらのオブジェクトにも有意な好みはなかった(52.0 ±1.9%、n = 16、t15 = 1.1、p = 0.29;1サンプルt-test対偶然レベル)。この強力なエンコーディングプロトコルは、平均パーセンテージ探査の観点から示すように、1-hと24-hの両方の遅延(1-hメモリ、77.9±2.4%、n = 8、t7 = 11.8、p<0.001;24-h、メモリ)よりも有意に高かった新しい場所でのオブジェクトの優先につながりました。 65.2 ±5.3%、n = 8、t7 = 2.8、p = 0.025;1 サンプルの t-test 対偶然レベル)。1-hと24-hのメモリの間に有意な差はなかった(p = 0.056;ペアになっていないウェルチのt-test)。
弱いエンコーディング試行中 (20 分エンコード; 結果は 4 つのコンテキストからプールされます。 図4B)は、どちらのオブジェクトにも有意な好みはなかった(51.1±1.0%、n = 66、t65 = 1.2、p = 0.24;1サンプル t-test対偶然レベル)。この弱いエンコーディングプロトコルは、1-h遅延を伴うテストで偶然レベルと比較して、新しい場所でのオブジェクトの好みの有意な増加を生み出したが、24時間遅延(4つのコンテキストすべてからのデータを組み合わせた;1-hメモリ、66.7±2.0%、n = 32、t31 = 8.2、p < 0.001;24-h,メモリ、メモリ、メモリ< 49.6 ± 2.6%、n = 34、t33 = 0.16、p = 0.87;1 サンプル の t-test 対偶然レベル)。1-h と 24-h の遅延を伴うテストのパフォーマンスには有意な差がありました (1-h メモリ: n = 32、24-h メモリ: n = 34、 t61.5 = 5.2, p < 0.001; ペアになっていないウェルチの t-test)。
グループレベルのメモリは、24-h遅延テストでは偶然レベルのパフォーマンスによってインデックス付けされたとして観測されなかったが、個々の変動を示した。この低メモリ条件(例えば、24-hテスト)に対するこの高い変動は、オブジェクトのよりランダムな探査のために一般的に観察された。したがって、ラットのパフォーマンスを個別に解釈しないことが重要です。代わりに、個々のデータポイントの分布を、検定の信頼性の高い結果としてグループ平均と共に使用することができます。エンコーディングが強いほど、ラットの行動はより均一になり、強力な符号化プロトコルに関して図4Aで観察されるように、統計的有意性に達するために必要なラットの数は少なくなります。対照的に、弱い条件の信頼性の高い結果を得るためには、より大きなグループが必要です(図4B)。

図4:強いエンコーディングと弱いエンコーディングの後のメモリパフォーマンス( A)強力なエンコード試行(3×5分エンコーディング)の後に1-hまたは24時間の試験試験が続いた。エンコード試行中はどちらのオブジェクトにも有意な優先順位が存在しなかった(n = 16)。強力なエンコーディングは、偶然レベル(1-hおよび24-hメモリ:n = 8)と比較して、1-hと24-hの両方の遅延を伴うテストの新しい場所でのオブジェクトの好みを有意に増加させました。グループ間に有意差はなかった。(B) 弱いエンコード試行(20分エンコーディング)の後に1-hまたは24-hのいずれかの試験が続く。エンコード試行中に、どちらのオブジェクトもグループとして有意な優先順位が存在しなかった(n = 66)。弱いエンコーディングは、偶然レベル(1-hメモリ:n = 32;24-hメモリ:n = 34)と比較して、テストの新しい場所でのオブジェクトの好みを有意に増加させましたが、24-h遅延ではありません。1-h と 24 時間の遅延を伴うテストのパフォーマンスには大きな違いがありました。結果は 4 つのコンテキストからプールされました。個々のデータポイントはドットで表されます。すべてのバーは、新しい場所でのオブジェクトの探査の割合 ±を平均s t-test 対偶然レベル (50%、破線)。 ###p < 0.001;ns、重要ではありません。ペアになっていないウェルチの t-test。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
この確立されたプロトコルの重要な利点は、ラットの同じコホートを持つ4つの異なるコンテキスト(図1C)を使用して4回実行できることです。図 5に示す結果は、2 つの実験グループ (1-h および 24-h メモリ グループ) でカウンターバランスを使用する 1 つの可能な方法を示しています。2 つのグループは 2 つのコンテキスト (コンテキスト 1 と 2) で相殺され、2 つの追加コンテキスト (コンテキスト 3 と 4) で繰り返されます。図 5A)。4 つのコンテキストの結果は、各実験グループのメモリが各コンテキストの偶然レベルと比較して評価された図 5B,Dに個別に示されています (1-h メモリ: コンテキスト 1, 69.9 ± 3.6%, n = 9, t8 = 5.5, p < 0.001;コンテキスト 2, 65.6 ± 3.9%, n = 9, t8 = 4.0, p = 0.004;コンテキスト 3, 65.2 ± 3.8%, n = 7, t6 = 4.0, p = 0.007;コンテキスト 4, 65.3 ± 5.6%, n = 7, t6 = 2.7, p = 0.035;24-h メモリ: コンテキスト 1, 45.1 ± 6.4%, n = 9, t8 = 0.77, p = 0.46;コンテキスト 2, 49.1 ± 4.9%, n = 9, t8 = 0.18, p = 0.86;コンテキスト 3, 57.2 ± 4.1%、 n = 8, t7 = 1.7, p = 0.12;コンテキスト 4, 47.6 ± 4.7%, n = 8, t7 = 0.52, p = 0.62;1 サンプルの t-test 対偶然レベル)。
コンテキスト 1、2、および 4 では、グループの被験者間比較は、1-h と 24-h のメモリ (1-h メモリ対 24-h メモリ: コンテキスト 1、t12.7 = 3.4、p = 0.005;コンテキスト 2, t15.2 = 2.6, p = 0.019;コンテキスト 3, t13.0 = 1.4, p = 0.17;コンテキスト 4, t12.2 = 2.4, p = 0.032;ペアになっていないウェルチのt-test)。データの表現と対象内比較を改善するために、2 つのカウンターバランス コンテキストの結果を組み合わせました (図 5C、E)。結合された実験グループは、再び個別に偶然レベルと比較されました(コンテキスト1と2を組み合わせる:1-hメモリ、67.8±2.6%、n = 18、t17 = 6.7、p<0.001;24-hメモリ、47.1±3.9%、n =18、t17 = 0.74;p = 0.47;コンテキスト 3 と 4 を組み合わせた: 1-h メモリ、 65.3 ± 3.3%、n = 14、t13 = 4.7、 p < 0.001;24-h メモリ, 52.4 ± 3.2%, n = 16, t15 = 0.73, p = 0.48;1 サンプルの t-test 対偶然レベル)。次いで、実験群を互いに比較した。
両方のコンテキストペアでは、対象内比較によって明らかにされたグループ間に有意な違いがありました (1-h メモリ対24-hメモリ: コンテキスト 1 と 2 を組み合わせ、t16 = 3.5, p = 0.003;コンテキスト 3 と 4 を組み合わせ、t13 = 2.4、p = 0.032;ペアの t-test)。2つのカウンターバランスセッションに対してコンテキスト1と4を使用した弱い符号化プロトコルでも、野生型のLister Hoodedラットと同等の結果が得られた(データは示されていない)。結果の再現性と信頼性は、一方向の分散分析を使用して各データセットを比較することによって検証されました。4つのコンテキスト間で有意差は検出されなかった(1-hメモリ:F3,28 = 0.31、p = 0.81;24-hメモリ:F3,30 = 0.99、p= 0.41)。したがって、このプロトコルの指示に従っていることを考えると、オブジェクト位置テストは、繰り返しの最小の影響で確実に繰り返すことができます。

図5:2つのセッションで相殺された2つの実験グループを用いて弱い符号化プロトコルの結果を提示し、分析する方法は異なる。 カウンターバランスは、2つの追加セッション(コンテキスト3と4)で繰り返されました。(BおよびD)各コンテキストと実験グループの結果を、それぞれ偶然レベルと互いに比較した。4 つのコンテキストすべてにおいて、1-h 遅延のテストでの新規の場所でのオブジェクトの好みが、偶然レベル [Context 1 および 2: n = 9 / グループあたり 9 (B) に比べて大幅に増加しました。コンテキスト 3 および 4: n = グループあたり 7 (D)24時間の遅延テストでは、新しい場所のオブジェクトの好みは偶然と変わらない(コンテキスト1と2:n = グループあたり9;コンテキスト 3 および 4: n = グループあたり 8)。被験者間比較で明らかにされているように、文脈1、2、および4における実験群の好みには有意な相違があったが、文脈3は明らかにされていない。*p < 0.05, **p < 0.01, ***p < 0.001;1 サンプルt-test 対偶然レベル (50%、破線)。#p < 0.05;##p < 0.01;ns、重要ではありません。ペアになっていないウェルチのt-test。(CおよびE)結果は、2つのカウンターバランスされたコンテキストから実験グループを組み合わせた後に提示されます [コンテキスト 1 と 2 を組み合わせ, n = 17 グループあたり 17 (C);コンテキスト 3 と 4 を組み合わせ、n = グループあたり 14 (E)]新しい場所でのオブジェクトの好みは、両方のコンテキストペアで1-h遅延ではなく、24時間の遅延を伴うテストの偶然レベルと比較して有意に増加した。実験グループの被験者内比較は、両方のコンテキストペアで1-hと24-hの遅延を伴うテストで、新しい場所でのオブジェクトの好みの有意な違いを明らかにした。p < 0.001;1 サンプルt-test 対偶然レベル (50%、破線)。#p < 0.05, ##p < 0.01;ペアのt-test。個々のデータポイントはドットで表されます。すべてのバーは、SEMを平均±として、新しい場所でのオブジェクトの探査の割合を示しています。
{kind=link}
ディスカッション
オブジェクト位置タスクは、前述のように空間メモリを調査するためにさまざまなスタディで使用できます。セットアップの柔軟性により、異なる強みの短期記憶と長期記憶のモデリングが可能となり、低コストで簡単に実装できます。しかし、プロトコルには結果に影響を与えるパラメータが多数あり、これらのパラメータ6では異なるスタディが多少異なるため、初めてタスクをうまく実装することが困難になる可能性があります。上記のプロトコルは、読者がこのプロセスをスムーズに進める方法を意図しています。レプリカ性の高いタスクの実装を成功させる上で重要なステップを以下に説明します。
エンコーディング/テストセッションは、多くの場合、オブジェクトの位置実験を実行する際に焦点であるが、処理と習慣化プロトコルは、結果が乱れのない自然ラットの行動14、15に依存する行動テストのこれらの種類の結果に大きな影響を与える。そのため、エンコード/テスト セッションの前の手順は、ラットの動作やメモリに影響を与え、結果として最終的な結果に影響を与える可能性があるため、慎重に設計する必要があります。ラットが実験者に精通し、タスクが自然な行動を示す可能性を高めながらストレス要因の影響を最小限に抑えるような取り扱いと習慣の良いレベル8.プロトコルで述べたように、ラット株が家庭施設で維持されている場合、取り扱いは子犬の引き分けと同じくらい早く始めることができます。以前の経験(データは示されていません)に基づいて、いくつかの以前の研究16、17から、この早期の取り扱いは、その後の数ヶ月で低い不安と強化された好奇心をもたらします。
オブジェクトの位置タスクはラットの本質的な探索的ドライブのみに依存するので、ラットが探索することを熱望していない場合、または「ネオフォビック行動」1と呼ばれる新規性に近づくことを嫌がらない場合、期待される行動は容易に妨げられる可能性がある。そのため、研究の特定のニーズに応じて徹底的な取り扱いと習慣性プロトコルを含めることが強く推奨されます。このプロトコルは、最小要件ガイドとして使用することができ、さらなるステップを実装することができます(例えば、研究が後の段階で注射を含める場合は、注射手順と特定の保持位置への慣性が必要です)。実験ラットの株と年齢は、他の2つの影響力のある要因であり、最適でない結果を避けるために実験を計画する前に考慮する必要があります。異なるラット株は、異なる行動およびベースライン不安レベル18、19、20を有することができ、したがって、プロトコルへの特異的な調整が使用される株に応じて必要とされ得る。
このプロトコルは、長いエバンス株を持つTh-Creトランスジェニックラットとうまく機能することが確認されています リスターフードド株と野生型リスターフードラットに4回裏切り。行動実験におけるラットの論理的に理想的な開始年齢は約12週間20ですが、株間変動性とタスクの具体的な要件を考慮する必要があります。また、研究に関心がある場合は開発ラットを使用することもできますが、プロトコルの調整が必要であり、ここではカバーされていません。しかし、特定の年齢のラットがこのタスクを正常に実行するために必要な認知機能を開発したかどうかを考慮することが重要です。これを調査している研究21 は、出生後38日目の思春期ラットだけが、成人ラットで観察されるように、新しい場所での物体の好みに反映された同心空間記憶を示したことを報告している。ここで紹介したプロトコルは、最初のエンコード/テストセッションの開始時に15〜16週齢のラットを使用して成功しました。以前は、同じ強力な符号化プロトコルは、十分な年齢での取り扱いと習慣の欠如のために最適なレベルの習慣に達していなかった23週齢のラットを使用する場合、否定的な結果に最適ではない生成しました。これらのラットは、偶然レベルとは異なるパフォーマンスを発揮できなかったか、実際には、変位した物体の代わりに安定した物体の好みの点で観察されるように、新規性に対する嫌悪感を示した(データは示されていない)。これらの結果は、取り扱い習慣の年齢とタイミングが習慣の有効性に影響を与え、その結果、テストにおける不安とネオフォビック行動の観察に寄与する可能性があることを示す証拠を提供する。
ここでは、2 つの異なるプロトコルを概略して、オブジェクトの場所タスクで強力なエンコードまたは弱いエンコードを保証します。これらのプロトコルの確立の間に、単一の長い試験(例えば、20 分のコード化)の間に5〜10分の探査の後に物体への関心が低下し、ラットは最終的に探索を停止することが観察された。これにより、オブジェクトの位置のメモリが弱くなります。短い休止期間(例えば、3 x 5分符号化)と符号化試験をインターリーブする符号化プロトコルは、これを克服し、試験全体を通して高い探査をもたらす。したがって、アクティブな探査時間とこれら2つのエンコーディングプロトコルの異なるレイアウトは、メモリの強度に影響を与え、これは20分エンコードプロトコルの後よりも3 x 5分エンコード後に強くなります。同様の結果は、単一の試験とインターリーブされた試験プロトコルでわずかに異なる期間を使用して達成することができ、研究とラット株のニーズに合わせて調整することができます。
部屋の中で外部の手がかりだけを持つプレーンな白いオープンフィールドを使用するプロトコルとは対照的に、ここで提示されるプロトコルは、学習に多くの時間を必要とする明確なコンテキストと迷路内の手がかりを持つアリーナを使用しています。したがって、エンコード試行の前にプロトコルにコンテキスト習慣化ステップを追加することをお勧めします。これにより、ラットはこのマップに関連してオブジェクトの位置をエンコードするだけで済むため、習慣化中に各コンテキストの空間マップを形成し、次のエンコード試行の期間を短縮することができます。さらに、コンテキストの習慣化により、ラットは3D空間的手がかりなど、各コンテキスト内の可能なあらゆる気晴らしに慣れ、エンコーディング/テストセッションにおけるオブジェクト探査以外の行動を最小限に抑えることができます。いくつかのレベル(すなわち、 広範囲のオブジェクト位置の組み合わせ(カウンタ)とオブジェクトの変位方向からなる徹底的なカウンターバランス方式の実装により、アリーナの角で光強度と壁の色/パターンの変動によって上昇する可能性のある不要な好みが最小限に抑えられます。
このタスクを繰り返す場合は、エンコード/テスト セッション間の複製性を高め、繰り返しの影響を最小限に抑えるため、いくつかの要因を考慮する必要があります。まず、異なるコンテキスト (エンコーディング/テスト セッションの繰り返し回数と同じ数) は、同じコンテキストを使用して繰り返しセッションを実行することによって発生する可能性のある空間メモリの蓄積を避けるように設計する必要があります。これを実現するために、異なる色とパターンの交換可能な壁を備えた装置が使用された(図1B,C)。壁に掛けられた明確な壁や3Dオブジェクト(おもちゃや小さな日常的なアイテム、プロトコルと図1Cを参照)は、ラットが文脈に関連してオブジェクトの位置を学ぶのに使用する可能性のある空間的な手がかりとランドマークです。テストで移動したオブジェクトのプリファレンスが得られない場合、コンテキストのこれらのパラメータ(壁面設計と空間的キュー)の変更が考慮されます。または、このプロトコルのように、四角形または円形のアリーナを、正方形のアリーナの代わりにオブジェクトの位置タスクに使用することもできます。円形のアリーナは、コーナーを有するアリーナでしばしば観察されるコーナーの好み22を排除すると報告されており、したがって、特に高い不安ラットまたはマウス株を扱う場合に有益であり得る。このプロトコルで 4 つの異なるコンテキストを作成する要件は四角形の形状で最も最適に機能しますが、いくつかの調整に従って円形のアリーナを機能させることができます。
第二に、各エンコード/テストセッション間の間隔は、ラットが毎回同じレベルの関心を保持するように決定する必要があり、繰り返しの密なスケジュールに起因する累積的な学習のリスクを回避する必要があります。通常、エンコードと試験の間の遅延時間の少なくとも2倍の間隔で十分であり、2回以上の繰り返しに対して長い間隔が好ましい。つまり、24時間テスト後の最低48時間間隔は1回または2回の繰り返しで十分ですが、4回の繰り返しには1週間間隔を使用することをお勧めします。 図 5 の結果と ANOVA を使用した比較が示すように、タスクを 4 回正常に繰り返すことができます。これに基づいて、確立されたプロトコルを使用して、最大4つの実験条件のバランスを取ることができます。実験グループの数は、異なるコンテキストでのエンコード/試行セッションの繰り返しの数を決定します。 図 5 の結果は、2 つの実験グループでプロトコルを使用する 1 つの可能な方法を表しています。グループは 2 つのセッションで相殺され、同じ条件が 2 つの追加セッションで繰り返されました (検証の目的で)。2 番目のカウンターバランス セッションのセットは、新しい条件のバランスを取るためにも使用できます。同様に、3つまたは4つの実験条件を、それぞれ3つまたは4つのカウンターバランスセッションを用いて比較することができる。
このような場合、コンテキストは、プロトコルで説明されている対照的な特性に対応するように設計する必要があります。カウンターバランス設計は、長期的な効果や損傷を残す可能性のある薬理学的介入などの追加の操作を使用する実験には適していない可能性があることに注意してください。テストの有効性と再現性を維持するために、実験をそれに応じて設計する必要があります。繰り返しテストのデータを表示し、いくつかの方法で分析できます (図 5を参照)。初期分析では、各コンテキストの実験グループを、1サンプルt-testを使用して偶然レベルと個別に比較して、重要な好みを決定することができます(図5B,D)。これは、データを簡単に理解するのに役立ちますが、グループの間接的な比較のみを保証します。したがって、2つ以上のグループを比較するには、2サンプルのt-検定(ペアまたはペアでない)またはANOVAを使用してデータを分析する必要があります。これは、単一のエンコード/テストセッション内のグループの被験者間比較 (図 4Aおよび図5B,D) または 2 つ (またはそれ以上) のカウンターバランスコンテキストからのグループの被験者内比較の形式で行うことができます (図 5C,E)。後者の方法は、特に、前述のように、動作のランダム性のために高い分散をもたらす、弱いメモリ条件を扱う場合に強く推奨されます。
カウンターバランスコンテキストを組み合わせることで、グループの動作を最小限のバリエーションで確実に視覚化するために必要なグループが大きくなります。カウンターバランス セッションで繰り返しプロトコルを使用すると、同じ統計的な能力を持つ単一のテストを使用して必要となる数の約 3 分の 1 にラットの数が減少することが期待できます。通常、カウンターバランスセッションの場合は7〜15ラット(合計)の範囲のサンプルサイズと、効果サイズとパワーの両方が0.8より大きい単一セッションに対して20〜50匹(1グループあたり10〜25匹)の範囲で十分である。必要な動物の数の減少と、このプロトコルを使用して各動物から得られる情報の増加は、研究を洗練し、研究における動物の倫理的使用の3R原則に役立ちます。このステップでは、強い記憶を伴わないランダムラットの挙動は、個々の強い好みが偶然より下と上の両方をもたらす可能性があることを覚えておいてください。個々のデータは慎重に解釈する必要があります。グループ内の個々のデータポイントの分布は、結果を解釈するための有益な情報にもなります。 図4 と 図5に示すように、メモリの強度によって分布が変化します。全体的に見て、ここで紹介するプロトコルは、短期および/または長期の空間記憶をモデル化する繰り返しでオブジェクトの位置タスクを簡単に実装できます。シンプルで柔軟なトレーニングプロトコルとさらなる操作を実装する可能性は、このタスクを一般的な選択肢にします。このプロトコルに対するこれらの変更により、メモリの取得、統合、リコールなどの特定のステップの調査が可能になります。
開示事項
著者らは開示するものは何もない。
謝辞
アントニオス・アジミナス、ドロシー・ツ、キイチ・オハラ、デビッド・ベットの皆様に、洞察力に富んだご意見やご提案をお願い申し上げたいと思います。この研究はエラスムス+(G.BとL.N.に)によって支えられた。オーフス大学大学院健康研究科(K.H.へ)ノボノルディスク財団ヤングリザベーション賞2017(NNF17OC0026774)、ルンドベックフォンデン(DANDRITE-R248-2016-2518)、PROMEMO - デンマーク国立研究財団(DNRF133)が出資する卓越性センターである記憶タンパク質センター(T.T.へ)。
資料
| Name | Company | Catalog Number | Comments |
| Open-field/experimental box | O'Hara & Co (Japan) | OF-3001 | Open-field box for the object location task |
| Object 1: cones | O'Hara & Co (Japan) | ORO-RR | |
| Object 2: footballs | O'Hara & Co (Japan) | ORO-RB | |
| Object 3: rectangular blocks | O'Hara & Co (Japan) | ORO-RC | Rectangular blocks were modified after purchase |
| Object location task apparatus | O'Hara & Co (Japan) | SPP-4501 | Sound attenuating box that contains the open-field box for the object location task |
| Tracking software | O'Hara & Co (Japan) | TimeSSI | For movement tracking and automated camera functions |
| Wild-type Lister Hooded rats | Charles River | 603 |
参考文献
- Hughes, R. N. Neotic preferences in laboratory rodents: issues, assessment and substrates. Neuroscience and Biobehavioral Reviews. 31 (3), 441-464 (2007).
- Blaser, R., Heyser, C. Spontaneous object recognition: a promising approach to the comparative study of memory. Frontiers in Behavioral Neuroscience. 9, 183 (2015).
- Dix, S. L., Aggleton, J. P. Extending the spontaneous preference test of recognition: evidence of object-location and object-context recognition. Behavioral Brain Research. 99 (2), 191-200 (1999).
- Barker, G. R., Warburton, E. C. When is the hippocampus involved in recognition memory. Journal of Neuroscience. 31 (29), 10721-10731 (2011).
- Mumby, D. G., Gaskin, S., Glenn, M. J., Schramek, T. E., Lehmann, H. Hippocampal damage and exploratory preferences in rats: memory for objects, places, and contexts. Learning & Memory. 9 (2), 49-57 (2002).
- Gulinello, M., et al. Rigor and reproducibility in rodent behavioral research. Neurobiology of Learning and Memory. 165, 106780 (2019).
- Rudeck, J., Vogl, S., Banneke, S., Schonfelder, G., Lewejohann, L. Repeatability analysis improves the reliability of behavioral data. PLoS One. 15 (4), 0230900 (2020).
- Gouveia, K., Hurst, J. L. Optimising reliability of mouse performance in behavioural testing: the major role of non-aversive handling. Scientific Reports. 7, 44999 (2017).
- Migues, P. V., et al. Blocking synaptic removal of GluA2-containing AMPA receptors prevents the natural forgetting of long-term memories. Journal of Neuroscience. 36 (12), 3481-3494 (2016).
- Maingret, N., Girardeau, G., Todorova, R., Goutierre, M., Zugaro, M. Hippocampo-cortical coupling mediates memory consolidation during sleep. Nature Neuroscience. 19 (7), 959-964 (2016).
- Chao, O. Y., de Souza Silva, M. A., Yang, Y. M., Huston, J. P. The medial prefrontal cortex - hippocampus circuit that integrates information of object, place and time to construct episodic memory in rodents: Behavioral, anatomical and neurochemical properties. Neuroscience and Biobehavioral Reviews. 113, 373-407 (2020).
- Takeuchi, T., et al. Locus coeruleus and dopaminergic consolidation of everyday memory. Nature. 537 (7620), 357-362 (2016).
- Witten, I. B., et al. Recombinase-driver rat lines: tools, techniques, and optogenetic application to dopamine-mediated reinforcement. Neuron. 72 (5), 721-733 (2011).
- Costa, R., Tamascia, M. L., Nogueira, M. D., Casarini, D. E., Marcondes, F. K. Handling of adolescent rats improves learning and memory and decreases anxiety. Journal of the American Association for Labaratory Animal Science. 51 (5), 548-553 (2012).
- Schmitt, U., Hiemke, C. Strain differences in open-field and elevated plus-maze behavior of rats without and with pretest handling. Pharmacology Biochemistry and Behavior. 59 (4), 807-811 (1998).
- Kosten, T. A., Kim, J. J., Lee, H. J. Early life manipulations alter learning and memory in rats. Neuroscience and Biobehavioral Reviews. 36 (9), 1985-2006 (2012).
- Denenberg, V. H., Grota, L. J. Social-seeking and novelty-seeking behavior as a function of differential rearing histories. Journal of Abnormal and Social Psychology. 69 (4), 453-456 (1964).
- Clemens, L. E., Jansson, E. K., Portal, E., Riess, O., Nguyen, H. P. A behavioral comparison of the common laboratory rat strains Lister Hooded, Lewis, Fischer 344 and Wistar in an automated homecage system. Genes, Brain, and Behavior. 13 (3), 305-321 (2014).
- Ennaceur, A., Michalikova, S., Bradford, A., Ahmed, S. Detailed analysis of the behavior of Lister and Wistar rats in anxiety, object recognition and object location tasks. Behavioral Brain Research. 159 (2), 247-266 (2005).
- Deacon, R. M. Housing, husbandry and handling of rodents for behavioral experiments. Nature Protocols. 1 (2), 936-946 (2006).
- Contreras, M. P., Born, J., Inostroza, M. The expression of allocentric object-place recognition memory during development. Behavioral Brain Research. 372, 112013 (2019).
- Yaski, O., Eilam, D. How do global and local geometries shape exploratory behavior in rats. Behavioral Brain Research. 187 (2), 334-342 (2008).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved