このコンテンツを視聴するには、JoVE 購読が必要です。 サインイン又は無料トライアルを申し込む。
Method Article
マウスの頭蓋窓手術のためのロボットドリル開頭術による熱損傷の評価
要約
頭蓋窓は、トランスジェニックマウスの生体内イメージングを可能にするために、遍在的に実装された外科的技術になっています。このプロトコルでは、頭蓋窓の半自動骨穴あけを実行し、外科医間のばらつきを減らし、熱血液脳関門の損傷を部分的に軽減するのに役立つ外科用ロボットの使用について説明しています。
要約
頭蓋窓手術は、多光子または他の生体内イメージング技術を使用して、生きたマウスの脳組織のイメージングを可能にします。ただし、手作業で開頭術を行う場合、脳組織に熱損傷が発生することが多く、これは本質的に手術ごとに異なり、個々の外科医の技術に依存する可能性があります。手術ロボットを導入することで、手術を標準化し、手術に伴う熱損傷を減らすことができます。この研究では、熱損傷を評価するために、ロボット掘削の3つの方法をテストしました:水平、ポイントごと、およびパルスポイントごと。水平掘削は連続掘削回路図を利用しますが、ポイントごとに頭蓋窓を囲むいくつかの穴を掘削します。パルス化されたポイントバイポイントは、「2秒オン、2秒オフ」の穴あけスキームを追加し、穴あけの合間に冷却を可能にします。静脈内注射されたEvans Blue(EB)染料の蛍光イメージングは脳組織の損傷を測定し、掘削現場の下に配置された熱電対は熱損傷を測定します。熱電対の結果は、水平(16.66°C±2.08°C)およびポイントバイポイント(18.69°C±1.75°C)グループと比較して、パルスポイントバイポイント(6.90°C±1.35°C)グループで温度変化が大幅に減少していることを示しています。同様に、パルスポイントバイポイントグループも、水平法と比較して頭蓋窓穿孔後のEBの存在が有意に少なく、脳内の血管への損傷が少ないことを示しています。したがって、パルスポイントバイポイントドリル法は、熱損傷を低減するための最適なスキームであるように思われます。ロボットドリルは、トレーニング、変動を最小限に抑え、熱損傷を減らすのに役立つ便利なツールです。研究室全体で多光子イメージングの使用が拡大するにつれて、結果の厳密さと再現性を向上させることが重要です。ここで取り上げる方法は、これらの手術ロボットをより適切に使用してこの分野をさらに前進させる方法を他の人に知らせるのに役立ちます。
概要
頭蓋窓は、生きている動物の皮質の直接視覚化とイメージングを可能にするために、神経科学、神経工学、および生物学の分野で広く使用されるようになりました1,2,3,4,5,6,7,8,9,10,11 .トランスジェニックマウスと多光子イメージングの強力な組み合わせは、in vivo脳における回路活性および他の生物学的洞察に関する非常に貴重な洞察を提供した12、13、14、15、16、17、18。頭蓋骨に取り付けられた小型顕微鏡は、これらの機能をさらに拡張して、目覚めた、自由に動く動物の記録を可能にしました19。頭蓋窓を作成するプロセスでは、皮蓋骨を薄くするか完全に除去して、皮質20の上に透明なガラス片を固定するのに十分な大きさの開頭術を生成するためのパワードリルが必要です。ポリジメチルシロキサン(PDMS)および他のポリマーも頭蓋窓材料として試験されている9、21。最終的に、理想的な頭蓋窓は、その下の正常な内因性活動を変化または妨害しないものです。しかし、頭蓋窓の穿孔は下にある組織を悪化させ、脳の損傷、環境の混乱、および多光子イメージングの深さを閉塞する点まで髄膜に影響を与えることが一般に認められています22。結果として生じる神経炎症は、血液脳関門(BBB)の透過性から、インプラント部位23周辺のグリア細胞の活性化および動員に至るまで、幅広い効果を有する。したがって、より安全で再現性の高い頭蓋窓掘削法の特性評価は、一貫した画像品質と交絡因子の低減に不可欠です。
下にある組織への外傷を最小限に抑えるように注意が払われていますが、骨を掘削する行為は、脳に熱的および機械的摂動の両方を引き起こす可能性があります24,25。硬膜への偶発的なドリルの侵入による機械的外傷は、様々な程度の皮質損傷をさらに誘発し得る24。Shoffstallらによる研究では25、骨掘削による熱は、脳実質25にエバンスブルー(EB)染料が存在することによって示されるように、BBB透過性の増加をもたらしました。静脈内注射されたEB色素は、血流中の循環アルブミンに結合するため、通常、かなりの濃度で健康なBBBを通過しません。その結果、EB色素はBBB透過性26、27の感度マーカーとして一般的に使用されている。彼らの研究は、研究中のその後の生物学的後遺症に対するBBB透過性の影響を直接測定していませんでしたが、以前の研究では、BBB透過性を慢性的に埋め込まれた微小電極に対する神経炎症反応の増加および運動機能の変化と相関させています28。
研究の目的によっては、熱的および機械的損傷の大きさが実験誤差の原因となり、研究の厳密さと再現性に悪影響を与える可能性があります。頭蓋窓を製造するための引用された方法は数十あり、それぞれが異なる掘削装置、速度、技術、およびユーザーを使用しています1、2、3、4、5、6、7、8、9、10、11。Shoffstall et al.25は、加熱結果の観察された変動は、手で掘削する場合には制御できない他の側面の中でも、ドリルの適用力、送り速度、および適用角度の変動に起因すると報告しました25。自動掘削システムやその他の定位固定装置が再現性と結果の一貫性を向上させることができるという信念がありますが、公表された方法研究では、結果の1つとして温度またはBBB透過性を厳密に評価していません。したがって、頭蓋窓を生成するためのより再現性が高く一貫して適用される方法、および頭蓋窓の穴あけが下にある神経組織に与える影響を評価するために厳密に適用される方法が必要です。
この研究の焦点は、頭蓋窓の一貫した安全な掘削方法を決定および開発することです。頭蓋窓設置のための開頭術のサイズは、脳移植微小電極のための標準的な開頭術よりも有意に大きい。このような開頭術は、標準装置を使用する場合、単一のバリ穴で完了することができず、それによって、手作業で行う場合により多くの外科医間の技術のばらつきを導入する20。外科用掘削ロボットが現場に導入されていますが、広く採用されていません1,6,29。穴あけの自動化は、観察された試験間の変動に寄与する変数の制御を提供し、装置の使用が外科医間および外科医内の影響を減らすことができることを示唆しています。これは、頭蓋窓の配置に必要なより大きな開頭術の追加の困難を考えると、特に興味深いものです。掘削を自動化することによって提供される制御には明らかな利点があると考えることができますが、これらの機器の実装についてはほとんど評価されていません。目に見える病変は認められていないが5、EBを用いたより高感度な試験が望まれている。
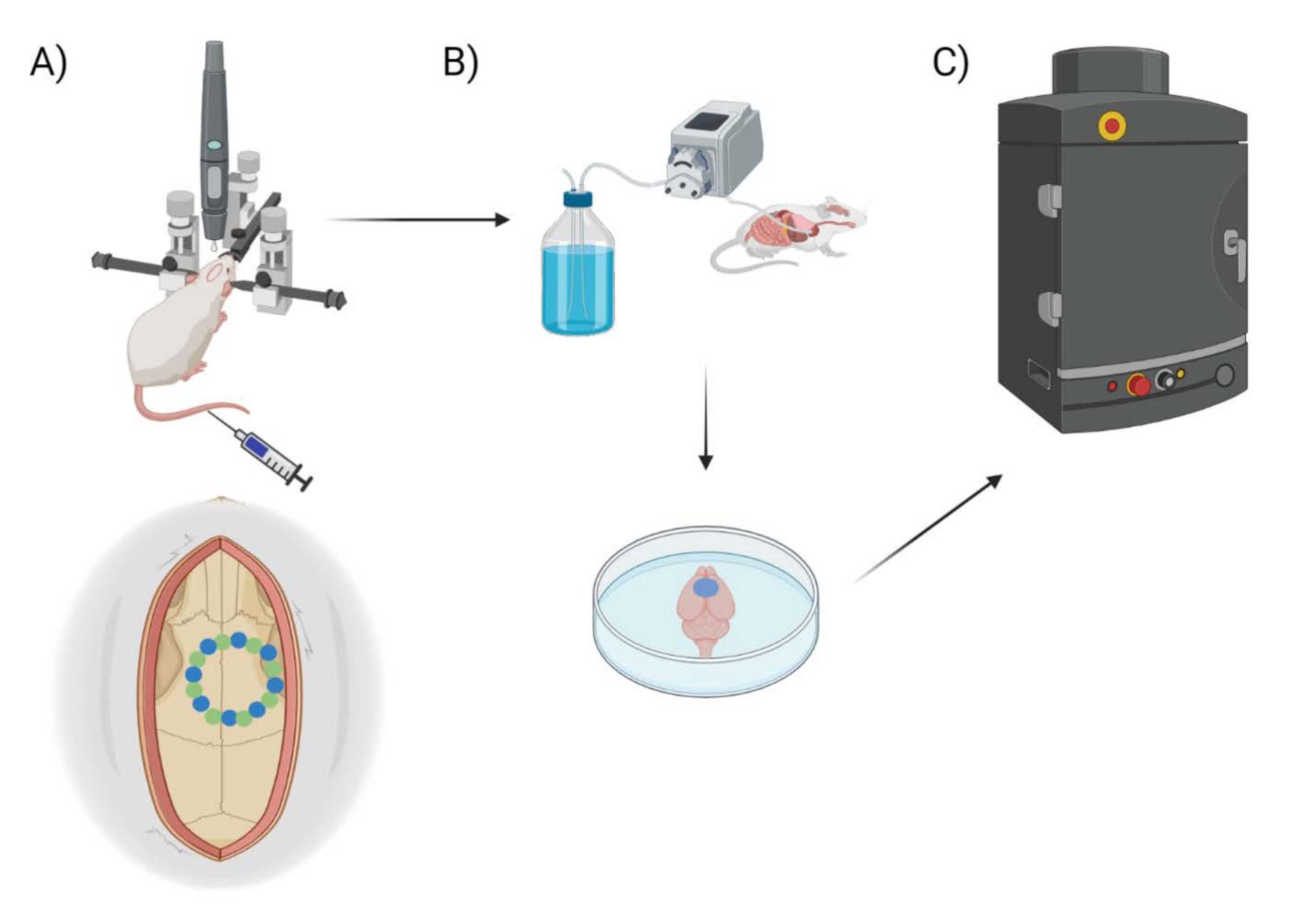
ここで、BBB透過性は、定位固定装置座標のプログラミング、開頭術の計画/マッピング、およびドリルビットのルーティングされた経路を参照する掘削スタイルの選択(「ポイントごと」対「水平」)を可能にする、対応するソフトウェアを備えた市販の外科用穴あけロボットを使用して測定されます。最初に、8つの「シード」ポイントがドリルされ(図1A)、頭蓋窓の輪郭が描かれます。ここから、シード間のスペースは、「ポイントバイポイント」または「水平」ドリル法のいずれかを使用して切り取られます。「ポイントバイポイント」は垂直パイロットホールカット(CNCドリルプレスと同様)を実行し、「水平」は穴の輪郭を描く頭蓋窓の円周に沿って水平カットを実行します(CNCルーターに似ています)。両方の方法の結果は、頭蓋骨窓を明らかにするために取り除くことができる頭蓋骨の一部です。穴あけによる損傷を隔離するために、追加の損傷を避けるために、頭蓋窓は物理的に取り外されません。EB色素と蛍光イメージングの組み合わせを使用して、マウスで開頭術を行った後のBBB透過性を測定し、挿入された熱電対を使用して、穴あけ中の脳表面の温度を直接測定します(図1B、C)。以前の観察では、2秒間隔でのパルス掘削のオン/オフがドリル加熱25を緩和するのに十分であることが示されたため、手術ロボットの実験アプローチに組み込まれています。
提示された研究の目的は、開頭穿孔による熱損傷を評価する方法を実証することです。方法は自動掘削のコンテキストで提示されていますが、そのような方法は手動掘削スキームにも適用できます。これらの方法は、標準的な手順として採用する前に、機器および/または掘削スキームの使用を検証するために使用できます。

図1:実験的なパイプラインの概略図。 頭蓋窓手順後のEB定量のために動物が受けたプロセスを示す概略図。(A)脳定位固定装置フレームと手術ロボットドリルを備えたマウスの概略セットアップ。頭蓋窓の例は、シードポイント(緑)とエッジポイント(青)を持つ運動皮質の上に示されています。(B)灌流のセットアップには、動物全体に1xリン酸緩衝生理食塩水(PBS)を注射して血液を除去し、続いて脳を抽出することが含まれます。(C)次に、脳をEB蛍光イメージングシステムチャンバーに入れて、エバンスブルー染料の蛍光イメージングを行います。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
プロトコル
すべての手順と動物の世話の実践は、ルイス・ストークス・クリーブランド退役軍人省医療センターの施設動物管理および使用委員会に従ってレビュー、承認、および実行されました。
1. 手術ロボットのハードウェア設定
- 手術の前に、手術ロボット( 材料表を参照)のマニュアルとガイドに従って、ハードウェアとソフトウェアをセットアップしてください。マニュアルに詳述されているようにフレームキャリブレーションを実行します。ドリルまたはフレームを移動する場合は、精度を確保するためにドリルを再調整することをお勧めします。
2. ソフトウェアの準備
- 外科用ソフトウェア( 材料の表を参照)に移動し、[ クリーンなプロジェクトで開始]を選択して新しいプロジェクトを作成します。被写体を上部に マウス として設定し、使用するドリル座標を指定します。
- [ 新しいプロジェクトの開始] を選択します。
- ここから、左下 隅にある計画 をクリックして、掘削座標計画画面に移動します。実行する頭蓋窓技術の穴あけスキームを作成します。
- これを行うには、脳定位固定装置アトラスの任意の場所をクリックします。参照としてブレグマを使用し、運動皮質の座標として次の座標を入力します:AP = 1.50、ML = 1.25、DV = 0.00。キーボードの Enter キーを押して、選択した座標を更新します。
注:背側腹側(DV)座標は掘削の深さを示すため、ここで入力する必要はありません。 - [ ターゲットの保存 ] をクリックしてこれらの座標を保存し、適切な名前を入力します。ここから、左下の[ 移動 ]ボタンをクリックして、メインのドリル画面に戻ります。
- これを行うには、脳定位固定装置アトラスの任意の場所をクリックします。参照としてブレグマを使用し、運動皮質の座標として次の座標を入力します:AP = 1.50、ML = 1.25、DV = 0.00。キーボードの Enter キーを押して、選択した座標を更新します。
- 「 プロジェクト>ツール」>「名前を付けて保存 」をクリックして、このテンプレートプロジェクトを後のプロジェクトで再利用します。これにより、後で使用するためにドリル座標が自動的に保持されます。
3.手術の準備
- PrismPlusマウス30,31(材料の表を参照)をイソフルランチャンバー(1.5 L /分O2で3.5%)で麻酔します。目の乾燥を防ぐために目の潤滑剤を塗布し、バリカンを使用して頭を剃り、爪を整えてマウスが縫合糸を引っ掻くのを防ぎます。
注:PrismPlusマウスは、多光子イメージングに使用されるトランスジェニック蛍光種の一種です。ヘテロ接合型のPrismPlusマウスは蛍光遺伝子を欠いているため、他の進行中の研究からの動物の排泄物を減らすためにここで使用され、この研究では多光子イメージングがないためです。野生型マウスも同様の結果を示すことが期待される。 - 抗生物質セファゾリン(24 mg / kg)、鎮痛薬カルプロフェン(5 mg / kg)、およびブプレノルフィン(0.05-0.10 mg / kg)の皮下注射を麻酔したマウスに投与します。.切開の前に、切開部位の下(目の後ろから始まる頭蓋骨の正中線に沿って1インチ)にマルカイン(0.25%、100μL)を単回皮下注射します。
注:ここで使用される薬は、以前に確立されたIACUCプロトコルに従います。ただし、EMLAクリームを、手術および尾静脈注射前のマルチモーダル効果のための局所麻酔薬として、およびカルプロフェンの代わりにメロキシカムSRとして検討することをお勧めします。.EMLAおよびメロキシカムSRは、イソフルラン麻酔の前に提供することができる。 - 付属のイヤーバーを使用して手術ロボットの定位固定装置フレームに動物を取り付け、ノーズコーンからの吸入 により 0.5%〜2%イソフルランで麻酔を維持します。
- マウスの反応、呼吸(~55-65呼吸/分)、心拍数(300-450 bpm)、および色(ピンク)に基づいて、訓練を受けた獣医技術者またはスタッフが麻酔の深さを注意深く監視していることを確認します。ウィスカーと通常のつま先のつまみも麻酔の深さを決定するための尺度として使用できます。バイタルの価値は、機関のIACUC規制によって決定されます。
- 循環ウォーターパッドで動物の体温を維持し、血中酸素および心拍数測定システムを使用してバイタルを監視します。
- 手術部位をグルコン酸クロルヘキシジン(CHG)と70%イソプロパノールでこすり洗いして滅菌します。手術中に無菌性を維持するために、マウスと定位固定装置フレームの上に滅菌プラスチックラップを置きます。
注:これらのプロトコルは生存手術用に開発されましたが、適切な掘削プロトコル方法をテストおよび決定することに焦点が当てられていたため、提示されたデータは非生存動物の使用を反映しています。
4.頭蓋骨の準備
- メスの刃を使用して、目の後ろから頭蓋骨の正中線を1インチ切開します。
- 皮膚を引き戻して頭蓋骨を露出させ、(オプションで)開創器を使用して手術窓を維持します。滅菌綿先端のアプリケーターを使用して、残留組織と膜を取り除きます。
- 綿の先端のアプリケーターで3%過酸化水素を使用して頭蓋骨を乾かし、きれいにします。
注意: これにより、頭蓋骨の縫合糸が見えるようになります。ブレグマとラムダは簡単に見えるはずです。そうでない場合は、過酸化水素をさらに塗布するか、切開部のサイズを大きくします。 - メーカーの推奨に従って、手術ロボットの穴あけセットアップからマウスにワニ口クリップケーブルを接続することにより、「自動停止」機能を可能にします。「オートストップ」はインピーダンスの変化を検出することで機能するため、ドリルビットが骨ではなく髄液(CSF)に接触すると、ドリルは穴あけを停止し、脳への損傷を防ぎます。
5.エバンスブルーテール静脈注射
注意: EBは発がん性の可能性があります。取り扱いの際は手袋を使用してください。
- 簡単に注射できるように尾を準備するには、アルコールワイプで拭き取ります。任意選択で、ウィンターグリーン油は、静脈35を拡張するために局所的に適用することができる。
- 片手で尻尾をつかみ、もう一方の手でEBを含む注射器を扱います。親指と人差し指を使用して、尾を曲げて、尾の曲がりの上に尾静脈を露出させます。シリンジ(1または2mL、30Gインスリンシリンジ)を静脈と平行に挿入し、EBの量をゆっくりと注入する。EB(4%w / v)は、尾静脈注射 を介して 2 mL / kg体重の濃度で投与されます。.
注意: 針が正しく挿入されている場合、シリンジからテールへの流れに対する抵抗は最小限またはまったく感じられません。抵抗がある場合、またはEB染料が尾部に現れる場合は、尾部を下に移動して再試行してください。 - 注入したら、EBがマウス全体に循環するまで5分間待ってから、穴あけを開始します。注射が成功したことは、マウスの四肢と手術窓が青色に変わるとすぐに確認されます。
6.外科用ロボットの穴あけ手順
- 頭蓋骨の穴あけの準備ができたら、手術用ソフトウェアに戻ります。手順 2.4 で定義した、ドリルの座標を指定したテンプレート プロジェクトを開きます。
- 「プロジェクト>ツール」>「新規>テンプレートプロジェクトを選択」に従い、ステップ 2 (ソフトウェアの準備) で指定したテンプレートプロジェクトを選択します。
- [ 同じプロトコル要素] > [計画 (ターゲット ポイント)] > [ドリル パラメータ] を選択して、この新しいプロジェクトに引き継ぐことができます。
- [ 新しいプロジェクトの開始] をクリックします。
- 次に、ドリルとフレームを修正して、現在の動物のマウス頭蓋骨の傾きとスケーリングを考慮します。[ ツール ] をクリックし、[ 傾きと拡大縮小の補正] を選択して、修正画面を開きます。画面の上部で、薄赤色のドリルボタンをクリックして、 ドリル がアクティブ(シリンジではない)であることを確認します。
注意: 有効にすると、 ドリル ボタンは暗赤色/明るい赤色に変わります。シリンジボタンは、このプロトコルでは使用されないため、無視できます。- まず、現在の動物のブレグマとラムダの位置を設定して、スケール、ピッチ、ヨーを修正します。キーボードコントロールまたは画面上のコントロールのいずれかを使用して、ドリルビットを移動します。ドリルビットがブレグマの上に配置したら、頭蓋骨に触れるまでドリルビットを下げ、[ ブレグマの設定]をクリックします。ラムダについてもこれを繰り返します。
- 次に、頭蓋骨の特定のロールを調整します。[ 中点に移動 ]ボタンをクリックして、ドリルビットを頭蓋骨の中心に自動的に調整します。 左に2 mm クリックし、頭蓋骨に触れるまでドリルビットをゆっくりと下げます。[ 左点を設定]をクリックします。
- 脳の右側に対して手順6.2.2を繰り返します。これで、この特定の頭蓋骨用にシステムが設定されます。
注意: ここでの修正は、適切な掘削座標と深さを確保するために重要です。マウスは、修正の必要性をできるだけ減らすために、できるだけまっすぐに近づける必要があります。大きな補正が必要な場合は、穴あけの精度が低下する可能性があります。
- 修正が実行された後、をクリックして修正ウィンドウから出てきます 閉める 画面の中央下にあります。をクリックしてドリル画面に移動します ツール をクリックし、 ドリル。。。 掘削手順を開始します。
- 画面上部の[ドリル]ドロップダウンから[開頭形状]が選択されていることを確認します。次に、[ドリルの中心と形状の選択] をクリックし、手順 2.3.1 で指定した定義済みのターゲットを選択します。この画面で、ターゲットの形状として[円]を選択し、円の直径2として2.60mmを入力します。[表示] をクリックします。
注: 頭蓋窓の直径は、ドリルビットの中心をシードポイントの中心として作成されます。小さなドリルビット(直径= 0.6 mmまたはベンダーが提供する推奨ビットサイズ)を使用して、より大きなドリルビットを使用した結果として追加される余分な直径を最小限に抑えます。特殊なドリルビットは、手術ロボット専用に使用されます。これで、8 つのシード ポイントとエッジ ポイントがそれぞれ緑と青の点で頭蓋骨に表示されます。 - メインウィンドウをクリックし、キーボードショートカット のControl + Shift + D を使用して、画面の右側に ドリルポイント メニューを表示します。これにより、特定のドリルポイントの深さとステータスを表示できます。
- ドリルを開始する前に、必要に応じて[自動停止]チェックボックスの横にあるボタンをクリックして、 自動停止 機能をカスタマイズします。このボタンの既定値は [中] で、自動停止機能の感度に対応します。
注:これは、動物に適した感度を見つけるために事前にテストすることができます。このプロトコルでは、脳への穴あけを最小限に抑えるために最高の感度が使用されました。 - 自動停止機能を有効にしてカスタマイズしたら、シードポイントの掘削を開始します。[ 自動スキャン ] をクリックして、ドリルがシード 1 から自動的に開始されるようにします。ドリルビットがCSFに触れると、自動停止機能がインピーダンスの変化を検出し、穴あけの停止と頭蓋骨からのビットの収縮につながります。
- 自動停止が変化を検出できない場合に備えて、掘削に注意してください。 エスケープ キーを押すと、手動でドリルをキャンセルできます。[ドリル]メニューの下部とインピーダンス値の右側にあるピンクの円をクリックして、ドリルを開始または停止することもできます。
注意: ドリルビットは、推定頭蓋骨の厚さに等しい深さまで(または自動停止機能がアクティブになるまで)自動的にドリルします。 - 推定深度に達する前に自動停止がアクティブにならない場合は、画面にポップアップが表示され、1) #mmの掘削と下降を続ける、2)現在の 深さでマークして続行する、3) 現在のポイントをスキップして続行する、または 4)プロセスを停止します(後で続行できます)。以下のいずれかのオプションを選択します。
- [ ドリルを続行して # mm さらに下降]に、ドリルを進める距離を入力します。デフォルトでは、0.1 mm が使用されます。脳の偶発的な侵入を防ぐために、より短い距離が提案される場合があります。
- この画面で硬膜に到達したと思われる場合は、現在の深さ でマークして続行 するオプションを選択して、その深さの硬膜にマークを付け、次のシードに進みます。
- 現在のポイントをスキップして続行し、プロセスを停止します(後で続行できます)を使用して、ドリルビットのトラブルシューティングまたはクリーニングを行い、自動停止が再び機能したら戻ります。
- すべてのシードポイントがドリルされたら、自動停止機能を使用して終了していない場合は、硬膜ピックを使用して手動で穴の深さを確認します。これにより、掘削された深さが頭蓋骨を貫通したことが保証されます。
- エッジポイントドリルを開始する前に、[ドリル]メニューの [エッジカット ]テキストの横にあるドロップダウンを選択して、必要な「エッジカット」のタイプを決定します。2 つのオプションは、[ ポイント単位 ] と [水平方向] です。
- 「ポイント バイポイント」(Point-by-Point ) を選択すると、各エッジポイントを個別にドリルし、隣接するシードポイントの深さによって決定される深さまでドリルします。必要に応じて、下の [エッジ スケーリング...] ボタンを使用してスケーリングを調整しますが、通常はデフォルトの [スケーリングなし] で十分です。
- エッジ点 1 からドリルを開始するには 水平 方向を選択し、連続ドリルモーションを使用してドリル円の全周を一周します。デフォルトでは、水平カットは100μm間隔でカットされ、ウィンドウの周囲を一周してから、さらに100μm深く進みます。必要に応じて、下の [カットオプション... ]ボタンでインターバルの深さとドリル速度を変更します。
- 自動カットオフセット(エッジカットボックスの下)を使用して、隣接するシードポイントから所定のオフセットを取得して自動カット深さを調整します。このプロトコルでは、20μmの自動カットオフセットが使用されました。動物ごとに最適なオフセットを決定するために、さらにテストを行うことができます。
- エッジカットの設定が決まったら、ドリルメニューの中央にある [自動カット ]ボタンをクリックしてエッジポイントドリルを開始します。ポイントバイポイントドリルの場合、最後のエッジがドリルされると、ドリル手順は終了します。水平掘削の場合は、頭蓋窓を解放するのに十分な頭蓋骨が掘削されるまで続けます。
注意: 窓が解放されるまで穴あけが実行されますが、下にある組織への損傷を防ぐために、ここでは窓は物理的に解放されません。さまざまな掘削回路図を評価するには、穴あけのみの結果としての損傷を特定することが重要です。- 水平ドリルが 1 つのシード点の深さに達したら、[ドリル点]メニューでそのシードを右クリック(または最初に複数の点を選択)し、[ 深さをロック]をクリックします。これにより、その領域を深く切断することなく水平切断を継続できます(したがって、脳への侵入を回避できます)。
注意: 硬膜の深さが異なるシードポイントがある場合、水平掘削手順に必要な深さに違いが生じる可能性があります。
- 水平ドリルが 1 つのシード点の深さに達したら、[ドリル点]メニューでそのシードを右クリック(または最初に複数の点を選択)し、[ 深さをロック]をクリックします。これにより、その領域を深く切断することなく水平切断を継続できます(したがって、脳への侵入を回避できます)。
- 自動停止機能が正しく機能していない場合は、ビットのベースインピーダンスに影響を与える可能性があるため、ドリルビットに破片や潜在的な血液、生理食塩水などが完全に付着していることを確認してください。さらに、自動停止が一貫して機能しない場合に備えて、以下で説明するいくつかの手動穴あけオプションのいずれかから1つを選択してください。
- ドリルメニューで、シードまたはエッジを右クリックし、「 エントリへ移動」(Go to Entry) を選択して、各シードに手動で移動します。マークされた深さをクリアするオプション、穴をリセットするオプション、および穴あけ手順を支援できるその他のオプションもあります。
- ドリル深さの前進を手動で制御するには、「ドリル」(Drill) メニューの上部にある 「アドバンス:」(Advance: ) テキストの横にあるドロップダウンから深さを選択します。すぐ下の [進む] ボタンをクリックして、設定した距離でドリルを進めます。
注意: この機能は、[進む]ボタンの下にある[硬膜の設定]ボタンと[表面の設定]ボタンと組み合わせて使用 すると、頭蓋骨と硬膜の両方の表面がどこにあるかをシステムに手動で通知できます。可能な場合は自動停止機能を使用しますが、必要に応じてこれらの手動オプションも十分です。 - 手動で掘削する場合は、ドリルがデュラを超えないように、各掘削深さ間隔の間にさらに注意してください。深さ間隔の間に硬膜ピックを使用してドリル穴をチェックし、硬膜に到達したかどうかを確認します。すべての手動シードドリルが終了したら、上記のようにエッジカット手順を通常どおり続行します。
- パルス方式
- 手動パルスドリルを実行するには、[ドリル]メニューの[自動停止]オプションの横にあるチェックボックスをオフにして、 自動停止 機能をオフにします。パルスのためにドリルがオフになるタイミングを制御できるようにするには、これをオフにする必要があります。
注意: パルスドリルは、頭蓋骨を冷やすために、2秒の穴あけの後に2秒の穴あけなしのパターンに従います。 - ドリルメニューで、ドリル深さの前進として100 μmを選択すると、これは~2秒の下向きの穴あけに相当します。
- 準備ができたら、[ 進める] をクリックして掘削を開始します。
注意: ドリルは 逃げ 口が押されるまで深さで回転し続けるため、ドリルが100μm進んだらすぐに停止する準備をしてください(不要な熱が発生します)。 - ドリルが100 μm進んだら、 エスケープキー を2回押してドリルを停止します。2秒後、頭蓋骨の深さについてこのサイクルを繰り返します。
注意: パルス方式を使用して実行できるのは、ソフトウェアと機械的な制約により、ポイントバイポイント方式のみです。連続水平掘削はこの方法では実行できません。 - 上記の方法で、すべてのシード点とエッジ点をドリルします。硬膜に到達したら、ドリルメニューのボタンを使用して 硬膜を設定 してください。
- 手動パルスドリルを実行するには、[ドリル]メニューの[自動停止]オプションの横にあるチェックボックスをオフにして、 自動停止 機能をオフにします。パルスのためにドリルがオフになるタイミングを制御できるようにするには、これをオフにする必要があります。
- 画面上部の[ドリル]ドロップダウンから[開頭形状]が選択されていることを確認します。次に、[ドリルの中心と形状の選択] をクリックし、手順 2.3.1 で指定した定義済みのターゲットを選択します。この画面で、ターゲットの形状として[円]を選択し、円の直径2として2.60mmを入力します。[表示] をクリックします。
7.灌流と脳抽出
- シードポイントとエッジポイントの掘削が終了したら、動物をさらに1時間イソフルラン麻酔下に置き、EB染料が損傷したBBBを循環して血管外排出できるようにします。心臓灌流を行って血管から血液や体液を取り除き、次に以下に説明するように画像化と分析のために脳を取り除きます。
- 頭蓋窓の作成後の1時間のEB循環期間の後、ケタミン(160 mg / kg)とキシラジン(20 mg / kg)のカクテルを腹腔内に動物に注射します。.応答しない場合は、心臓灌流を実行します。
- ハサミを使用してマウスの腹部を切り開き、胸郭を垂直に切り、横隔膜を横切って水平に切断して心臓を露出させます。胸郭を引っ込めて、心臓をはっきりと見ます。心臓の左心室にバタフライニードルを挿入し、1xリン酸緩衝生理食塩水(PBS)を全身に注入し始めます。心臓の右心房のごく一部を切り取って、蓄積した圧力を解放します。
- 25 mLの1x PBSが体全体に灌流された後、灌流を停止し、安楽死の二次手段としてマウスを断頭します。
注:脳を隔離するために、動物が安楽死および/またはエンドポイント灌流の制度的に承認された方法を必ず実行してください。 - ここから、ロンジャーで骨と組織を取り除くことによって頭蓋骨から脳を抽出します。
- 抽出した脳を蛍光イメージングシステムで画像化し、掘削部位周辺の脳にあるEBの量を観察します。
注:EBは循環アルブミンに結合します。脳に血管損傷が発生すると、EBが漏れ出して脳組織に結合し、損傷の明確な視覚的指標につながります。
8.エバンスブルーのイメージングと分析
- ハードウェアの初期化
- EB蛍光イメージングシステムに接続されているコンピューターの電源を入れ、他のアイテムが準備されているので、イメージングソフトウェア( 材料表を参照)を起動します。光源、プラットフォーム、カメラの順に電源を入れます。
- イメージングソフトウェアに移動し、画像取り込みコントロールパネルの[初期化]をクリックします。システムとチャンバーは、初期化が完了するとすぐに赤から緑に信号を送ります。
注意: 光源の温度が最適なレベルに達するように、イメージングの30分前にEB蛍光イメージングシステムを初期化します。
- 脳のイメージング
- 移植された脳をステージ中央の透明な皿に入れてイメージングします。
- [画像 取り込みコントロールパネル]で、画像の設定を調整します。露光時間を選択します:1秒;ビニング:中;F /ストップ:F1;励起:535〜675nm;排出量: Cy 5.5;ランプレベル:高;そして視野:5センチメートル。フィルターをロックしたままにし、写真と蛍光のオーバーレイをチェックしたままにします。これらの設定は、以前のラボでの経験と、EB36 をイメージングする他の公開された方法に基づいています。
- EB蛍光イメージングシステムの画像をオープンアクセス画像処理ソフトウェア( 材料表を参照)にロードし、3つのフリーハンド関心領域(ROI)を生成して、背景、脳全体、および頭蓋窓の平均放射輝度を測定することにより、EBの蛍光強度を見つけます。
- 頭蓋窓と全脳の測定値を、対応するバックグラウンドROIに対して正規化します。
- 異なる励起フィルター(535-675 nm)の下で各脳を画像化し、生理食塩水コントロールに対する実験グループ間で最も高いS/N比(605 nmが選択されました)を有する波長を見つけます。
- 適切な波長と平均の下で平均放射輝度を分離して、脳全体と頭蓋窓ROIの平均平均放射輝度または蛍光強度を取得します。
- 生理食塩水コントロールに対して、各グループの頭蓋窓領域の平均平均放射輝度を見つけて正規化します。
9. 熱電対評価
- 3つの異なる掘削スキームと組み合わせて熱電対( 材料の表を参照)を使用して、頭蓋骨と脳の温度の変化を測定します。熱電対はデータ収集システム(DAQ)に接続されており、測定をMATLABに読み込むことができます。
- 死体マウスを定位固定装置フレームとロボットドリルセットアップに取り付けます。頭蓋骨25の側面に頭蓋窓が作られる場所から~2mm離れたところに小さな穴(シードポイントと同じサイズ)を手動で開けます。この穴により、熱電対を頭蓋窓の穴あけが行われる位置にスライドさせることができます(図2D)。
注:死体マウスが使用されるのは、頭蓋骨の側面をドリルで開く必要があるため、熱電対を頭蓋窓の穴あけ領域にスライドさせる必要があるためです。この死体マウスは、以前にエバンスブルー分析に使用されたものとは異なる動物です。 - 前に行ったように、3つのスキームのそれぞれについて掘削プロセスを開始します(ステップ6)。ドリルが頭蓋骨を通過すると、温度変化が急上昇し、脳の近くで加熱が発生していることを示します。
- 結果をMATLABに記録してプロットし、最大温度差を計算します。これは、パルス手動掘削方法とともに水平掘削とポイントバイポイント掘削を評価するために、シード掘削とエッジ掘削で別々に行う必要があります。
10. 統計
- Kruskal-Wallisランク和検定とBenjamini-Hochberg補正を使用してRの熱電対およびEB蛍光イメージングの統計分析を実行し、続いてウィルコクソンランク和正確確率検定25を使用してペアワイズ比較を行います。
結果
熱評価
熱損傷の可能性は、水平(図2A)、ポイントバイポイント(図2B)、およびパルスポイントバイポイント(図2C)の方法を使用して、掘削によるベースラインからの温度変化を測定することによって評価されました。図2Dは、熱データを取得するための実験セットアップを示しています。N = 4...
ディスカッション
EB色素とイメージングの使用は簡単で迅速であり、新しい方法や技術のために脳の血管損傷を評価するのに役立ちます。手術ロボットを使用する場合でも、現在ラボで行われている方法を確認する場合でも、実験的治療の効果と外科的影響を分離し、動物福祉を改善するために、外科的方法を検証することが重要です。熱電対のセットアップは、加熱が発生しないことを確認するための穴あ?...
開示事項
著者には、報告する利益相反はありません。内容は、米国退役軍人省、国立衛生研究所、または米国政府の見解を表すものではありません。
謝辞
この研究は、メリットレビュー賞GRANT12418820(カパドナ)およびGRANTI01RX003420(ショフストール/カパドナ)、および米国(US)退役軍人省リハビリテーション研究開発サービスの研究キャリア科学者賞#GRANT12635707(カパドナ)によって部分的にサポートされました。さらに、この研究は、国立衛生研究所、国立神経障害および脳卒中研究所GRANT12635723(カパドナ)、および国立生物医学画像および生物工学研究所、T32EB004314(Capadona/Kirsch)によっても部分的にサポートされました。この資料は、助成金番号GRANT12635723の下で国立科学財団大学院研究フェローシップによってサポートされている研究に基づいています。この資料に記載されている意見、調査結果、結論または推奨事項は、著者のものであり、必ずしも国立科学財団の見解を反映しているわけではありません。
資料
| Name | Company | Catalog Number | Comments |
| 1x Phosphate Buffered Saline Type: Reagent | VWR | MRGF-6235 | For Evans Blue dilution |
| Aura Software Type: Tool | Spectral Instruments Imaging | Open access imaging processing software for Lumina imaging sytems | |
| Buprenorphine Type: Drug | Sourced from Animal Facility | ||
| Carbide Drill Bit, 0.6mm (Robot Drill) Type: Tool | Stoelting | 58640-1 | |
| Carprofen Type: Drug | Sourced from Animal Facility | ||
| Cefazolin Type: Drug | Sourced from Animal Facility | ||
| Evans Blue Dye Type: Reagent | Millipore Sigma | E2129 | Reconstituted in 1x phosphate-buffered saline |
| Isoflurane Type: Drug | Sourced from Animal Facility | ||
| IVIS Lumina II Type: Tool | Perkin Elmer | CLS136334 | IVIS Lumina III currently in place of Lumina II on the market |
| Jenco Linearizing Thermometer Type: Tool | Jenco | 765JF | For Thermocouple setup |
| Ketamine Type: Drug | Sourced from Animal Facility | ||
| LivingImage Type: Tool | Perkin Elmer | Software for IVIS Lumina III | |
| Marcaine Type: Drug | Sourced from Animal Facility | ||
| Neurostar Software Type: Tool | Stoelting | Comes with surgical robot purchase | |
| Physiosuite with MouseSTAT® Pulse Oximeter & Heart Rate Monitor Type: Tool | Kent Scientific | PS-03 | Used to monitor vitals |
| PrismPlus mice Type: Animal | Jackson Labortory | 031478, RRID:IMSR_JAX:031478, Male, ~8 months old | Animals used for the study |
| Stoelting Drill and Injection Robot for Motorized Stereotaxic Instruments Type: Tool | Stoelting | 58640 | Main robotic drill with stereotaxic frame |
| Thermocouple Type: Tool | TC Direct | 206-557 | For Thermocouple setup |
| USB-6008 Multifunction I/O DAQ Type: Tool | National Instruments | USB-6008 | For Thermocouple setup |
| Xylazine Type: Drug | Sourced from Animal Facility |
参考文献
- Kilic, K., et al. Chronic cranial windows for long term multimodal neurovascular imaging in mice. Frontiers in Physiology. 11, 612678 (2020).
- Goldey, G. J., et al. Removable cranial windows for long-term imaging in awake mice. Nature Protocols. 9 (11), 2515-2538 (2014).
- Augustinaite, S., Kuhn, B. Intrinsic optical signal imaging and targeted injections through a chronic cranial window of a head-fixed mouse. STAR Protocols. 2 (3), 100779 (2021).
- Wang, X., et al. A skull-removed chronic cranial window for ultrasound and photoacoustic imaging of the rodent brain. Frontiers in Neuroscience. 15, 673740 (2021).
- Wang, Y., Xi, L. Chronic cranial window for photoacoustic imaging: a mini review. Visual Computing for Industry, Biomedicine, and Art. 4 (1), 15 (2021).
- Augustinaite, S., Kuhn, B. Chronic cranial window for imaging cortical activity in head-fixed mice. STAR Protocols. 1 (3), 100194 (2020).
- Kunori, N., Takashima, I. An implantable cranial window using a collagen membrane for chronic voltage-sensitive dye imaging. Micromachines. 10 (11), 789 (2019).
- Beckmann, L., et al. Longitudinal deep-brain imaging in mouse using visible-light optical coherence tomography through chronic microprism cranial window. Biomedical Optics Express. 10 (10), 5235-5250 (2019).
- Heo, C., et al. A soft, transparent, freely accessible cranial window for chronic imaging and electrophysiology. Scientific Reports. 6, 27818 (2016).
- Holtmaat, A., et al. Imaging neocortical neurons through a chronic cranial window. Cold Spring Harbor Protocols. 2012 (6), 694-701 (2012).
- Holtmaat, A., et al. high-resolution imaging in the mouse neocortex through a chronic cranial window. Nature Protocols. 4 (8), 1128-1144 (2009).
- Sundaram, G. S., et al. Characterization of a brain permeant fluorescent molecule and visualization of Abeta parenchymal plaques, using real-time multiphoton imaging in transgenic mice. Organic Letters. 16 (14), 3640-3643 (2014).
- Spires, T. L., et al. Dendritic spine abnormalities in amyloid precursor protein transgenic mice demonstrated by gene transfer and intravital multiphoton microscopy. Journal of Neuroscience. 25 (31), 7278-7287 (2005).
- Price, D. L., et al. High-resolution large-scale mosaic imaging using multiphoton microscopy to characterize transgenic mouse models of human neurological disorders. Neuroinformatics. 4 (1), 65-80 (2006).
- Kimchi, E. Y., Kajdasz, S., Bacskai, B. J., Hyman, B. T. Analysis of cerebral amyloid angiopathy in a transgenic mouse model of Alzheimer disease using in vivo multiphoton microscopy. Journal of Neuropathology and Experimental Neurology. 60 (3), 274-279 (2001).
- Hyman, B. T. The natural history of Alzheimer disease dissected through multiphoton imaging of transgenic mice. Alzheimer Disease and Associated Disorders. 20 (4), 206-209 (2006).
- Korzhova, V., et al. Long-term dynamics of aberrant neuronal activity in awake Alzheimer's disease transgenic mice. Communications Biology. 4 (1), 1368 (2021).
- Chawda, C., McMorrow, R., Gaspar, N., Zambito, G., Mezzanotte, L. Monitoring immune cell function through optical imaging: a review highlighting transgenic mouse models. Molecular Imaging and Biology. 24 (2), 250-263 (2022).
- Courtin, J., et al. A neuronal mechanism for motivational control of behavior. Science. 375 (6576), (2022).
- Mostany, R., Portera-Cailliau, C. A craniotomy surgery procedure for chronic brain imaging. Journal of Visualized Experiments. (12), e680 (2008).
- Cramer, S. W., et al. Through the looking glass: A review of cranial window technology for optical access to the brain. Journal of Neuroscience Methods. 354, 109100 (2021).
- Eles, J. R., Vazquez, A. L., Kozai, T. D. Y., Cui, X. T. Meningeal inflammatory response and fibrous tissue remodeling around intracortical implants: An in vivo two-photon imaging study. Biomaterials. 195, 111-123 (2019).
- Jorfi, M., Skousen, J. L., Weder, C., Capadona, J. R. Progress towards biocompatible intracortical microelectrodes for neural interfacing applications. Journal of Neural Engineering. 12 (1), 011001 (2015).
- Cole, J. T., et al. Craniotomy: true sham for traumatic brain injury, or a sham of a sham. Journal of Neurotrauma. 28 (3), 359-369 (2011).
- Shoffstall, A. J., et al. Potential for thermal damage to the blood-brain barrier during craniotomy: implications for intracortical recording microelectrodes. Journal of Neural Engineering. 15 (3), 034001 (2018).
- Saunders, N. R., Dziegielewska, K. M., Mollgard, K., Habgood, M. D. Markers for blood-brain barrier integrity: how appropriate is Evans blue in the twenty-first century and what are the alternatives. Frontiers in Neuroscience. 9, 385 (2015).
- Wang, H. L., Lai, T. W. Optimization of Evans blue quantitation in limited rat tissue samples. Scientific Reports. 4, 6588 (2014).
- Goss-Varley, M., et al. Microelectrode implantation in motor cortex causes fine motor deficit: Implications on potential considerations to Brain Computer Interfacing and Human Augmentation. Scientific Reports. 7 (1), 15254 (2017).
- Oomoto, I., et al. Protocol for cortical-wide field-of-view two-photon imaging with quick neonatal adeno-associated virus injection. STAR Protocols. 2 (4), 101007 (2021).
- Dougherty, J. D., Zhang, J., Feng, H., Gong, S., Heintz, N. Mouse transgenesis in a single locus with independent regulation for multiple fluorophores. PLoS One. 7 (7), 40511 (2012).
- Jung, S., et al. Analysis of fractalkine receptor CX(3)CR1 function by targeted deletion and green fluorescent protein reporter gene insertion. Molecular and Cellular Biology. 20 (3), 4106-4114 (2000).
- Kiyatkin, E. A., Sharma, H. S. Permeability of the blood-brain barrier depends on brain temperature. Neuroscience. 161 (3), 926-939 (2009).
- Eriksson, A. R., Albrektsson, T. Temperature threshold levels for heat-induced bone tissue injury: a vital-microscopic study in the rabbit. The Journal of Prosthetic Dentistry. 50 (1), 101-107 (1983).
- Bonfield, W., Li, C. H. The temperature dependence of the deformation of bone. Journal of Biomechanics. 1 (4), 323-329 (1968).
- Hrapkiewicz, K., Medina, L. . Clinical Laboratory Animal Medicine, second ed. , (2007).
- McLean, R., Moritz, A. R., Roos, A. Studies of thermal Injury. VI. Hyperpotassemia caused by cutaneous exposure to excessive heat. Journal of Clinical Investigations. 26 (3), 497-504 (1947).
- Kyweriga, M., Sun, J., Wang, S., Kline, R., Mohajerani, M. H. A large lateral craniotomy procedure for mesoscale wide-field optical imaging of brain activity. Journal of Visualized Experiments. (123), e52642 (2017).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved