
Un abonnement à JoVE est nécessaire pour voir ce contenu. Connectez-vous ou commencez votre essai gratuit.
Method Article
Évaluation des dommages thermiques causés par la craniotomie robotisée pour la chirurgie de la fenêtre crânienne chez la souris
* Ces auteurs ont contribué à parts égales
Dans cet article
Résumé
Les fenêtres crâniennes sont devenues une technique chirurgicale omniprésente pour permettre l’imagerie intravitale chez les souris transgéniques. Ce protocole décrit l’utilisation d’un robot chirurgical qui effectue un forage osseux semi-automatisé des fenêtres crâniennes et peut aider à réduire la variabilité d’un chirurgien à l’autre et à atténuer partiellement les dommages thermiques de la barrière hémato-encéphalique.
Résumé
La chirurgie de la fenêtre crânienne permet l’imagerie du tissu cérébral chez des souris vivantes avec l’utilisation de multiphotons ou d’autres techniques d’imagerie intravitale. Cependant, lors de la réalisation d’une craniotomie à la main, il y a souvent des dommages thermiques au tissu cérébral, ce qui est intrinsèquement variable d’une chirurgie à l’autre et peut dépendre de la technique individuelle du chirurgien. La mise en œuvre d’un robot chirurgical peut normaliser la chirurgie et entraîner une diminution des dommages thermiques associés à la chirurgie. Dans cette étude, trois méthodes de forage robotisé ont été testées pour évaluer les dommages thermiques: horizontale, point par point et pulsée point par point. Le forage horizontal utilise un schéma de forage continu, tandis que le forage point par point perce plusieurs trous englobant la fenêtre crânienne. Le point par point pulsé ajoute un schéma de forage « 2 s sur, 2 s off » pour permettre le refroidissement entre les forages. L’imagerie fluorescente du colorant Evans Blue (EB) injecté par voie intraveineuse mesure les dommages aux tissus cérébraux, tandis qu’un thermocouple placé sous le site de forage mesure les dommages thermiques. Les résultats des thermocouples indiquent une diminution significative du changement de température dans le groupe pulsé point par point (6,90 °C ± 1,35 °C) par rapport aux groupes horizontal (16,66 °C ± 2,08 °C) et point par point (18,69 °C ± 1,75 °C). De même, le groupe pulsé point par point a également montré significativement moins de présence d’EB après le perçage de fenêtres crâniennes par rapport à la méthode horizontale, indiquant moins de dommages aux vaisseaux sanguins dans le cerveau. Ainsi, une méthode de forage point par point pulsé semble être le schéma optimal pour réduire les dommages thermiques. Une perceuse robotisée est un outil utile pour aider à minimiser la formation, la variabilité et à réduire les dommages thermiques. Avec l’utilisation croissante de l’imagerie multiphotonique dans les laboratoires de recherche, il est important d’améliorer la rigueur et la reproductibilité des résultats. Les méthodes abordées ici aideront à informer les autres sur la façon de mieux utiliser ces robots chirurgicaux pour faire progresser le domaine.
Introduction
Les fenêtres crâniennes sont devenues omniprésentes dans les domaines des neurosciences, de l’ingénierie neuronale et de la biologie pour permettre la visualisation directe et l’imagerie du cortex chez les animaux vivants 1,2,3,4,5,6,7,8,9,10,11 . La puissante combinaison de souris transgéniques et d’imagerie multiphotonique a fourni des informations extrêmement précieuses sur l’activité des circuits et d’autres connaissances biologiques dans le cerveau in vivo 12,13,14,15,16,17,18. Les microscopes miniatures montés sur le crâne ont encore étendu ces capacités pour permettre des enregistrements chez des animaux éveillés et en mouvement libre19. Le processus de création d’une fenêtre crânienne nécessite un forage électrique pour amincir ou enlever complètement l’os crânien afin de produire des craniotomies suffisamment grandes pour fixer un morceau de verre transparent sur le cortex20. Le polydiméthylsiloxane (PDMS) et d’autres polymères ont également été testés comme matériaux de fenêtre crânienne 9,21. En fin de compte, la fenêtre crânienne idéale est celle qui n’altère pas ou n’interfère pas avec l’activité endogène normale en dessous. Cependant, il est communément admis que le perçage de fenêtres crâniennes aggrave les tissus sous-jacents, entraînant des dommages au cerveau, une perturbation de l’environnement et des méninges affectant au point d’obstruer la profondeur d’imagerie multiphotonique22. La neuroinflammation qui en résulte a un large éventail d’effets allant de la perméabilité de la barrière hémato-encéphalique (BHE) à l’activation et au recrutement des cellules gliales autour du site implantaire23. Par conséquent, la caractérisation de méthodes de perçage de fenêtres crâniennes plus sûres et plus reproductibles est cruciale pour une qualité d’imagerie constante et la réduction des facteurs de confusion.
Bien que l’on prenne soin de minimiser les traumatismes au tissu sous-jacent, le fait de percer l’os peut causer des perturbations thermiques et mécaniques au cerveau24,25. Un traumatisme mécanique résultant d’une pénétration accidentelle de perceuse dans la dure-mère peut en outre induire divers degrés de lésions corticales24. Dans une étude de Shoffstall et coll.25, la chaleur du forage osseux a entraîné une augmentation de la perméabilité de la BHE, comme l’indique la présence de colorant bleu Evans (EB) dans le parenchyme cérébral 25. Le colorant EB, injecté par voie intraveineuse, se lie à l’albumine circulante dans la circulation sanguine et ne traverse donc normalement pas une BHE saine à des concentrations appréciables. En conséquence, le colorant EB est couramment utilisé comme marqueur sensible de la perméabilité BBB26,27. Bien que leur étude n’ait pas mesuré directement l’impact de la perméabilité de la BHE sur les séquelles biologiques ultérieures à l’étude, des études antérieures ont corrélé la perméabilité de la BHE à une réponse neuroinflammatoire accrue aux microélectrodes implantées de façon chronique et à des altérations de la fonction motrice28.
Selon les objectifs de l’étude, l’ampleur des dommages thermiques et mécaniques peut contribuer à une source d’erreur expérimentale, affectant négativement la rigueur et la reproductibilité de l’étude. Il existe des dizaines de méthodes citées pour produire des fenêtres crâniennes, chacune utilisant un équipement de forage, des vitesses, des techniques et des utilisateursdifférents 1,2,3,4,5,6,7,8,9,10,11. Shoffstall et coll.25 ont signalé que la variation observée dans les résultats de chauffage était attribuée à la variabilité de la force appliquée, de la vitesse d’avance et de l’angle d’application de la foreuse, entre autres aspects qui ne peuvent être contrôlés lors du forage manuel 25. On croit que les systèmes de forage automatisés et d’autres équipements stéréotaxiques peuvent améliorer la reproductibilité et la cohérence des résultats, mais les études de méthodes publiées n’ont pas rigoureusement évalué la température ou la perméabilité BBB comme l’un des résultats. Par conséquent, il est nécessaire de disposer de méthodes plus reproductibles et appliquées de manière cohérente pour produire des fenêtres crâniennes, ainsi que de méthodes rigoureusement appliquées pour évaluer l’impact du forage de fenêtres crâniennes sur le tissu neural sous-jacent.
L’objectif de cette étude est de déterminer et de développer des méthodes de forage cohérentes et sécuritaires pour les fenêtres crâniennes. La taille de la craniotomie pour l’installation de fenêtres crâniennes est significativement plus grande que les craniotomies standard pour les microélectrodes implantées dans le cerveau. De telles craniotomies ne peuvent pas être complétées avec un seul trou de bavure lors de l’utilisation d’un équipement standard, introduisant ainsi une plus grande variabilité technique inter-chirurgienne lorsqu’elles sont effectuées à la main20. Des robots de forage chirurgical ont été introduits sur le terrain, mais n’ont pas été largement adoptés 1,6,29. L’automatisation du forage offre un contrôle sur les variables contribuant à la variation observée d’un essai à l’autre, ce qui suggère que l’utilisation de l’équipement peut réduire les effets inter- et intra-chirurgiens. Ceci est particulièrement intéressant étant donné la difficulté supplémentaire de la craniotomie plus grande nécessaire pour la mise en place de la fenêtre crânienne. Bien que l’on puisse supposer que le contrôle fourni par l’automatisation du forage présente des avantages évidents, il y a eu peu d’évaluation de la mise en œuvre de ces équipements. Bien que des lésions visibles n’aient pas été observées5, le test de sensibilité plus élevé utilisant EB est souhaité.
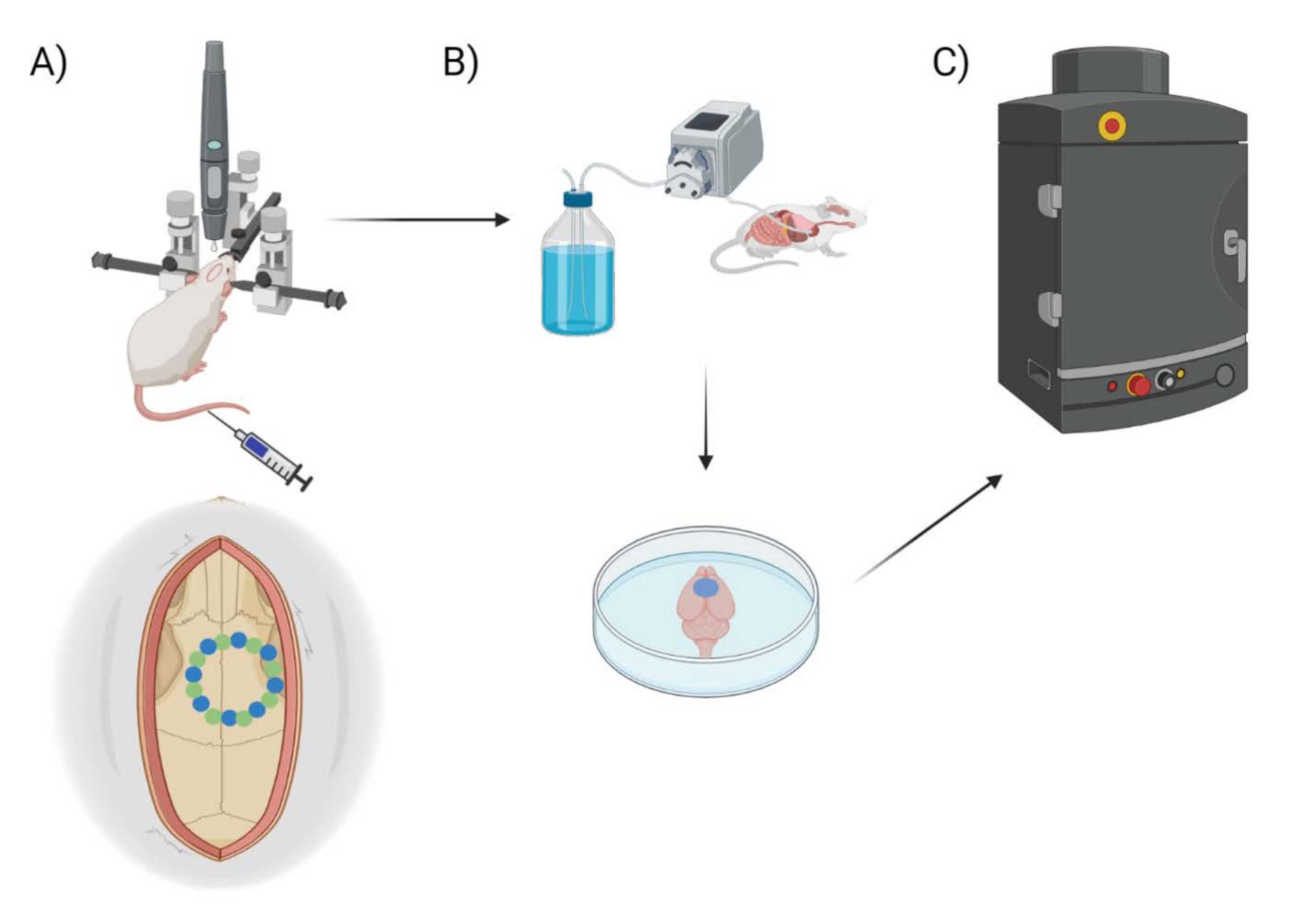
Ici, la perméabilité BBB est mesurée à l’aide d’un robot de forage chirurgical disponible dans le commerce avec le logiciel correspondant, qui permet la programmation de coordonnées stéréotaxiques, la planification / cartographie de la craniotomie et une sélection de styles de forage (« point par point » vs « horizontal »), se référant à la trajectoire acheminée du foret. Initialement, huit points « de départ » sont forés (Figure 1A), décrivant la fenêtre crânienne. De là, l’espace entre les graines est découpé à l’aide de la méthode de forage « point par point » ou « horizontale ». « Point par point » effectue des coupes de trous pilotes verticaux (similaires à une perceuse CNC), tandis que « horizontal » effectue des coupes horizontales le long de la circonférence de la fenêtre crânienne qui délimite le trou (similaire à une routeur CNC). Le résultat pour les deux méthodes est un morceau de crâne qui peut être enlevé pour révéler la fenêtre crânienne. Pour isoler les dommages causés par le forage, la fenêtre crânienne n’est pas physiquement retirée, afin d’éviter tout dommage supplémentaire. Une combinaison de colorant EB couplée à une imagerie fluorescente est utilisée pour mesurer la perméabilité de la BHE après avoir effectué des craniotomies chez la souris, et un thermocouple inséré est utilisé pour mesurer directement la température de la surface du cerveau pendant le forage (Figure 1B, C). Des observations antérieures ont indiqué que le forage pulsé marche/arrêt avec des intervalles de 2 s était suffisant pour atténuer le chauffage du forage25, et est donc incorporé dans l’approche expérimentale pour le robot chirurgical.
L’objectif du travail présenté est de démontrer les méthodes d’évaluation des dommages thermiques causés par le forage de craniotomie. Bien que les méthodes soient présentées dans le contexte du forage automatisé, ces méthodes peuvent également être appliquées aux schémas de forage manuel. Ces méthodes peuvent être utilisées pour valider l’utilisation d’équipements et/ou de schémas de forage avant de les adopter comme procédure standard.

Figure 1 : Schéma du pipeline expérimental. Schéma montrant le procédé que les animaux ont subi pour la quantification EB de la procédure de fenêtre post-crânienne. (A) Configuration schématique de la souris avec le cadre stéréotaxique et la perceuse robot chirurgicale. Un exemple de fenêtre crânienne est montré au-dessus du cortex moteur avec des points de départ (vert) et des points de bord (bleu). (B) La configuration de perfusion comprend l’injection de 1x solution saline tamponnée au phosphate (PBS) dans tout l’animal pour éliminer tout sang, suivie d’une extraction du cerveau. (C) Le cerveau est ensuite placé dans la chambre du système d’imagerie fluorescente EB pour effectuer l’imagerie fluorescente sur le colorant bleu Evans. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protocole
Toutes les procédures et pratiques de soins aux animaux ont été examinées, approuvées et exécutées conformément au comité institutionnel de soin et d’utilisation des animaux du Louis Stokes Cleveland Department of Veterans Affairs Medical Center.
1. Configuration du matériel de robot chirurgical
- Avant la chirurgie, suivez le manuel et le guide du robot chirurgical (voir le tableau des matériaux) pour configurer le matériel et les logiciels. Effectuez l’étalonnage du cadre comme indiqué dans le manuel. Si la perceuse ou le cadre sont déplacés, il est recommandé de recalibrer la perceuse pour assurer la précision.
2. Préparation du logiciel
- Accédez au logiciel chirurgical (voir Tableau des matériaux) et créez un nouveau projet en sélectionnant Commencer avec un projet propre. Définissez l’objet sur Souris en haut pour désigner les coordonnées de perçage à utiliser.
- Sélectionnez Démarrer un nouveau projet.
- De là, cliquez sur Planification dans le coin inférieur gauche pour accéder à l’écran de planification des coordonnées de forage. Créez le schéma de forage pour la technique de fenêtre crânienne à effectuer.
- Pour ce faire, cliquez n’importe où sur l’atlas stéréotaxique. Utilisez Bregma comme référence et entrez les coordonnées suivantes pour le cortex moteur : AP = 1,50, ML = 1,25, DV = 0,00. Appuyez sur Entrée sur le clavier pour mettre à jour les coordonnées sélectionnées.
REMARQUE: Les coordonnées dorso-ventrales (DV) indiquent la profondeur de forage et n’ont donc pas besoin d’une entrée ici. - Cliquez sur Store Target pour enregistrer ces coordonnées et entrer un nom approprié. De là, cliquez sur le bouton Déplacer en bas à gauche pour revenir à l’écran de perçage principal.
- Pour ce faire, cliquez n’importe où sur l’atlas stéréotaxique. Utilisez Bregma comme référence et entrez les coordonnées suivantes pour le cortex moteur : AP = 1,50, ML = 1,25, DV = 0,00. Appuyez sur Entrée sur le clavier pour mettre à jour les coordonnées sélectionnées.
- Cliquez sur Outils > Projet > Enregistrer sous pour réutiliser ce modèle de projet pour des projets ultérieurs. Cela conservera automatiquement les coordonnées de forage pour une utilisation ultérieure.
3. Préparation à la chirurgie
- Anesthésier les souris PrismPlus30,31 (voir Tableau des matériaux) dans une chambre d’isoflurane (3,5 % dans 1,5 L/minO2). Appliquez du lubrifiant pour les yeux pour éviter le dessèchement des yeux, rasez la tête à l’aide d’une tondeuse et coupez les ongles pour empêcher les souris de gratter les sutures.
REMARQUE: Les souris PrismPlus sont un type d’espèces fluorescentes transgéniques utilisées en imagerie multiphotonique. Les souris hétérozygotes PrismPlus n’ont pas les gènes fluorescents et ont donc été utilisées ici pour réduire les déchets animaux d’autres études en cours, et comme il n’y a pas d’imagerie multiphotonique dans cette étude. On s’attend à ce que les souris de type sauvage montrent des résultats similaires. - Administrer des injections sous-cutanées d’antibiotique céfazoline (24 mg / kg), de carprofène analgésique (5 mg / kg) et de buprénorphine (0,05-0,10 mg / kg) aux souris anesthésiées. Avant toute incision, administrer une seule injection sous-cutanée de marcaine (0,25%, 100 μL) sous le site d’incision (1 pouce le long de la ligne médiane du crâne en commençant derrière les yeux).
REMARQUE: Les médicaments utilisés ici suivent les protocoles IACUC précédemment établis. Cependant, il est recommandé de considérer la crème EMLA comme un anesthésique topique pour un effet multimodal avant la chirurgie et l’injection de veines de la queue ainsi que Meloxicam SR au lieu de Carprofen. EMLA et Meloxicam SR peuvent être administrés avant l’anesthésie à l’isoflurane. - Montez l’animal sur le cadre stéréotaxique du robot chirurgical, en utilisant les barres auriculaires fournies, et maintenez l’anesthésie avec 0,5% à 2% d’isoflurane par inhalation à travers un cône nasal.
- Assurez-vous que la profondeur de l’anesthésie est étroitement surveillée par un technicien vétérinaire qualifié ou un personnel, en fonction de la réactivité de la souris, de la respiration (~ 55-65 respirations / min), de la fréquence cardiaque (300-450 bpm) et de la couleur (rose). La moustache et le pincement régulier des orteils peuvent également être utilisés comme mesure pour déterminer la profondeur de l’anesthésie. Les valeurs des signes vitaux sont déterminées par les règlements institutionnels de l’IACUC.
- Maintenez la température corporelle de l’animal sur une nappe d’eau en circulation et surveillez les signes vitaux à l’aide d’un système de mesure de l’oxygène sanguin et de la fréquence cardiaque.
- Frottez la zone chirurgicale avec du gluconate de chlorhexidine (CHG) et 70% d’isopropanol pour la stérilisation. Pour maintenir la stérilité pendant la chirurgie, placez une pellicule de plastique stérile sur la souris et le cadre stéréotaxique.
REMARQUE : Bien que ces protocoles aient été élaborés pour les chirurgies de survie, les données présentées reflètent l’utilisation d’animaux non destinés à la survie, car l’accent était mis sur la mise à l’essai et la détermination des méthodes de protocole de forage appropriées.
4. Préparation du crâne
- À l’aide d’une lame de scalpel, effectuez une incision de 1 pouce sur la ligne médiane du crâne, en commençant par l’arrière des yeux.
- Tirez la peau vers l’arrière pour exposer le crâne et (éventuellement) utilisez des écarteurs pour maintenir la fenêtre chirurgicale. Enlevez tout tissu résiduel et toute membrane à l’aide d’applicateurs stériles à embout de coton.
- Sécher et nettoyer le crâne en utilisant du peroxyde d’hydrogène à 3% avec des applicateurs à embout de coton.
REMARQUE: Cela rendra les sutures du crâne visibles. Bregma et Lambda doivent être facilement visibles. Sinon, appliquez plus de peroxyde d’hydrogène ou augmentez la taille de l’incision. - Permettre la fonctionnalité d’arrêt automatique en connectant le câble de clip crocodile de la configuration de forage du robot chirurgical à la souris, conformément aux recommandations du fabricant. L’arrêt automatique fonctionne en détectant un changement d’impédance, de sorte qu’une fois que le foret entre en contact avec le liquide céphalorachidien (LCR) au lieu de l’os, le foret cesse de forer, évitant ainsi des dommages au cerveau.
5. Evans Injection de veine bleue de queue
ATTENTION : EB est un cancérogène possible. Utilisez des gants lors de la manipulation.
- Pour préparer la queue à une injection facile, essuyez avec une lingette imbibée d’alcool. En option, l’huile de gaulthérie peut être appliquée par voie topique pour dilater la veine35.
- Saisissez la queue dans une main tout en manipulant la seringue contenant EB dans l’autre main. À l’aide du pouce et de l’index, pliez la queue pour exposer la veine de la queue au-dessus de la courbure de la queue. Insérez la seringue (1 ou 2 mL, seringue à insuline de 30 G) parallèlement à la veine et injectez lentement le volume d’EB. L’EB (4 % p/v) est administrée à une concentration de 2 mL/kg de poids corporel par injection veineuse de queue.
REMARQUE: Une résistance minimale ou nulle à l’écoulement de la seringue dans la queue peut être ressentie si l’aiguille est correctement insérée. S’il y a une résistance ou si un colorant EB apparaît dans la queue, descendez sur la queue et réessayez. - Une fois injecté, attendez 5 minutes pour permettre à l’EB de circuler dans toute la souris avant de commencer le forage. La réussite de l’injection est immédiatement vérifiée lorsque les extrémités et la fenêtre chirurgicale de la souris deviennent bleues.
6. Procédure de forage de robot chirurgical
- Une fois que le crâne est prêt pour le forage, revenez au logiciel chirurgical. Ouvrez le projet modèle défini à l’étape 2.4 où les coordonnées de forage ont été désignées.
- Suivez Outils > Nouveau projet > Nouveau > Sélectionnez un projet modèle et choisissez le projet modèle qui a été désigné à l’étape 2 (préparation du logiciel).
- Sélectionnez les éléments du même protocole > la planification (points cibles) > les paramètres de forage à transférer dans ce nouveau projet.
- Cliquez sur Démarrer un nouveau projet.
- Ensuite, corrigez la perceuse et le cadre pour tenir compte de l’inclinaison et de l’échelle du crâne de souris de l’animal actuel. Cliquez sur Outils et sélectionnez Corriger l’inclinaison et la mise à l’échelle... pour ouvrir l’écran de correction. En haut de l’écran, assurez-vous que la perceuse est active (pas la seringue) en cliquant sur le bouton rouge clair Perceuse .
REMARQUE: Une fois activé, le bouton Drill deviendra rouge foncé / vif. Le bouton de seringue peut être ignoré, car il n’est pas utilisé dans ce protocole.- Tout d’abord, corrigez l’échelle, le tangage et le lacet en définissant l’emplacement de Bregma et Lambda sur l’animal actuel. Utilisez les commandes du clavier ou les commandes à l’écran pour déplacer le foret. Une fois que le foret est situé au-dessus de Bregma, abaissez-le jusqu’à ce qu’il touche juste le crâne et cliquez sur Définir Bregma. Répétez cette opération pour Lambda.
- Ensuite, ajustez pour le rouleau spécifique du crâne. Cliquez sur le bouton Aller au milieu du crâne pour ajuster automatiquement le foret au centre du crâne. Cliquez sur 2 mm vers la gauche , puis abaissez lentement le foret jusqu’à toucher le crâne. Cliquez sur Définir le point gauche.
- Répétez l’étape 6.2.2 pour le côté droit du cerveau. Maintenant, le système est configuré pour ce crâne spécifique.
REMARQUE: La correction ici est essentielle pour assurer des coordonnées de forage et une profondeur appropriées. La souris doit être montée aussi près que possible de la droite pour réduire autant que possible le besoin de correction. Si des corrections importantes sont nécessaires, cela peut entraîner une mauvaise précision du forage.
- Une fois la correction effectuée, sortez de la fenêtre de correction en cliquant sur Fermer en bas au milieu de l’écran. Accédez à l’écran de perçage en cliquant sur Outils , puis en sélectionnant Forer... pour commencer la procédure de forage.
- Assurez-vous que Craniotomy-Shape est choisi dans la liste déroulante Drill en haut de l’écran. Cliquez ensuite sur Sélectionner le centre de perçage et la forme et choisissez la cible prédéfinie nommée à l’étape 2.3.1. Sous cet écran, sélectionnez Cercle comme forme de la cible et entrez 2,60 mm comme diamètre2 du cercle. Cliquez sur Afficher.
REMARQUE: Le diamètre de la fenêtre crânienne est créé en utilisant le centre du foret comme centre des points de départ. Un petit foret (diamètre = 0,6 mm ou la taille de taillet recommandée fournie par le fournisseur) est utilisé pour minimiser le diamètre supplémentaire ajouté à la suite de l’utilisation d’un foret plus grand. Des forets spéciaux sont utilisés spécifiquement pour le robot chirurgical. Les huit points de graine et les points de bord apparaîtront maintenant sur le crâne sous forme de points verts et bleus, respectivement. - Cliquez sur la fenêtre principale et utilisez le raccourci clavier Ctrl + Maj + D pour afficher le menu Points de perçage sur le côté droit de l’écran. Cela permet de visualiser des profondeurs et des états de points de forage spécifiques.
- Avant de commencer le perçage, personnalisez la fonction d’arrêt automatique si nécessaire en cliquant sur le bouton en regard de la case à cocher Arrêt automatique . Ce bouton est défini par défaut sur Moyen, ce qui correspond à la sensibilité de la fonction d’arrêt automatique.
REMARQUE: Cela peut être testé au préalable pour trouver la bonne sensibilité pour les animaux. Dans ce protocole, la sensibilité la plus élevée a été utilisée pour assurer un forage minimal dans le cerveau. - Une fois la fonction d’arrêt automatique activée et personnalisée, commencez le perçage du point de départ. Cliquez sur Analyse automatique pour que l’exercice commence automatiquement à la graine 1. Une fois que le foret touche le LCR, la fonction d’arrêt automatique détecte un changement d’impédance, entraînant un arrêt du forage et une rétraction du taillant du crâne.
- Surveillez de près le forage au cas où l’arrêt automatique ne détecterait aucun changement. La touche Echap peut être enfoncée pour annuler manuellement le perçage. Le cercle rose situé au bas du menu Drill et à droite des valeurs d’impédance peut également être cliqué pour démarrer ou arrêter le perçage.
REMARQUE: Le foret percera automatiquement à une profondeur égale à l’épaisseur estimée du crâne (ou jusqu’à ce que la fonction d’arrêt automatique soit activée). - Si l’arrêt automatique n’est pas activé avant que la profondeur estimée ne soit atteinte, un écran apparaîtra invitant l’utilisateur à: 1) Continuer le perçage et descendre # mm plus loin, 2) Marquer à la profondeur actuelle et continuer, 3) Sauter le point actuel et continuer, ou 4) Arrêter le processus (peut être poursuivi plus tard). Choisissez l’une des options décrites ci-dessous.
- Pour Continuer le forage et descendre # mm plus loin, entrez une distance pour que la perceuse avance. Par défaut, 0,1 mm est utilisé. Une distance plus petite peut être suggérée pour empêcher la pénétration accidentelle du cerveau.
- Si l’on pense que la dure-mère a été atteinte à cet écran, sélectionnez l’option Marquer à la profondeur actuelle et continuer pour que le système marque la dure-mère à cette profondeur et passe à la graine suivante.
- Utilisez les options Ignorer le point actuel et continuer et Arrêter le processus (peut être poursuivi ultérieurement) pour dépanner ou nettoyer le foret et revenir une fois que l’arrêt automatique fonctionne à nouveau.
- Une fois que tous les points de départ ont été forés, si certains n’ont pas été terminés à l’aide de la fonction d’arrêt automatique, vérifiez manuellement la profondeur du trou à l’aide d’un pic de dure-mère. Cela garantira que la profondeur forée a bien pénétré à travers le crâne.
- Avant de commencer le perçage des pointes d’arête, décidez du type de « coupe de bord » souhaité en sélectionnant le menu déroulant à côté du texte Découpe des bords dans le menu Percer. Les deux options sont Point par point et Horizontalement.
- Sélectionnez Point par point pour percer chaque point d’arête individuellement et à une profondeur déterminée par les profondeurs de point de départ adjacentes. Ajustez la mise à l’échelle si nécessaire via le bouton Edge Scaling... ci-dessous, bien que la valeur par défaut Aucune mise à l’échelle soit généralement suffisante.
- Sélectionnez Horizontalement pour commencer le forage au point de bord 1 et utilisez un mouvement de perçage continu pour faire le tour de toute la circonférence du cercle de forage. Par défaut, la coupe horizontale coupera à intervalles de 100 μm, faisant tout le tour de la circonférence de la fenêtre avant d’avancer encore de 100 μm plus profondément. Si nécessaire, modifiez la profondeur d’intervalle et la vitesse de perçage sous le bouton Options de coupe... ci-dessous.
- Utilisez le décalage de coupe automatique (sous la zone Edge-Cut ) pour ajuster la profondeur de coupe automatique en prenant un décalage prédéterminé à partir des points de départ adjacents. Dans ce protocole, un décalage auto-découpé de 20 μm a été utilisé. D’autres tests peuvent être effectués pour déterminer un décalage optimal par animal.
- Une fois les paramètres de coupe des bords déterminés, commencez le perçage des points de bord en cliquant sur le bouton Couper automatiquement au milieu du menu Percer. Pour le forage point par point, une fois que le dernier bord a été foré, la procédure de forage est terminée. Pour le forage horizontal, continuez jusqu’à ce que suffisamment de crâne ait été percé pour libérer la fenêtre crânienne.
REMARQUE: Bien que le perçage soit effectué jusqu’à ce que la fenêtre puisse être libérée, la fenêtre n’est pas physiquement libérée ici pour éviter tout dommage aux tissus sous-jacents. Il est important d’isoler les dommages résultant du simple forage pour évaluer différents schémas de forage.- Une fois que le forage horizontal a atteint la profondeur d’un point de départ, cliquez avec le bouton droit de la souris sur ce point (ou sélectionnez d’abord plusieurs points) dans le menu Points de forage et cliquez sur Verrouiller la profondeur. Cela permettra à la coupe horizontale de continuer sans couper plus profondément pour cette zone (évitant ainsi de pénétrer dans le cerveau).
REMARQUE: S’il y a des points de départ avec des profondeurs de dure-mère différentes, cela peut entraîner des différences de profondeur nécessaires pour la procédure de forage horizontal.
- Une fois que le forage horizontal a atteint la profondeur d’un point de départ, cliquez avec le bouton droit de la souris sur ce point (ou sélectionnez d’abord plusieurs points) dans le menu Points de forage et cliquez sur Verrouiller la profondeur. Cela permettra à la coupe horizontale de continuer sans couper plus profondément pour cette zone (évitant ainsi de pénétrer dans le cerveau).
- Si la fonction d’arrêt automatique ne fonctionne pas correctement, assurez-vous que le foret est complètement nettoyé de tout débris ou de sang potentiel, de solution saline, etc., car ceux-ci peuvent avoir un impact sur l’impédance de base du foret. De plus, choisissez l’une des nombreuses options de perçage manuel décrites ci-dessous au cas où l’arrêt automatique ne fonctionnerait pas de manière cohérente.
- Dans le menu Percer, accédez manuellement à chaque graine en cliquant avec le bouton droit de la souris sur la graine ou l’arête et en choisissant Aller à l’entrée. Il existe également des options pour effacer les profondeurs marquées, réinitialiser le trou et d’autres options qui peuvent aider à la procédure de forage.
- Contrôlez manuellement l’avancement de la profondeur de forage en sélectionnant une profondeur dans le menu déroulant situé à côté du texte Avancé : en haut du menu Percer. Cliquez sur le bouton Avancer directement ci-dessous pour faire avancer la distance définie.
REMARQUE: Cette fonction peut être utilisée conjointement avec les boutons Set Dura et Set Surface sous le bouton Advance pour indiquer manuellement au système où se trouvent la surface du crâne et de la dure. Utilisez la fonction d’arrêt automatique dans la mesure du possible, mais si nécessaire, ces options manuelles suffisent également. - Si vous percez manuellement, prenez plus de précautions entre chaque intervalle de profondeur de forage pour vous assurer que le foret ne dépasse pas la dure-mère. Vérifiez le trou foré à l’aide d’un pic de dure-mère entre les intervalles de profondeur pour confirmer si la dure-mère a été atteinte. Une fois que tous les forages manuels de semences sont terminés, continuez la procédure de coupe des bords normalement comme indiqué ci-dessus.
- Méthode des impulsions
- Pour effectuer un perçage manuel par impulsions, désactivez la fonction d’arrêt automatique en décochant la case en regard de l’option Arrêt automatique dans le menu Percer. Celui-ci doit être désactivé afin de permettre de contrôler quand le perceur est éteint pour la pulsation.
REMARQUE: Le forage pulsé suit un schéma de 2 s de forage suivi de 2 s d’absence de forage pour permettre au crâne de refroidir. - Dans le menu Forage, sélectionnez 100 μm comme avancement de la profondeur de forage, cela équivaudra à ~2 s de forage vers le bas.
- Une fois prêt, cliquez sur Avancer pour commencer le forage.
REMARQUE : Soyez prêt à arrêter rapidement la foreuse une fois qu’elle a avancé de 100 μm, car la foreuse continue de tourner à la profondeur jusqu’à ce que l’échappement soit pressé (générant une chaleur inutile). - Une fois que la perceuse a avancé de 100 μm, appuyez deux fois sur Echap pour arrêter la perceuse. Après 2 s, répétez ce cycle pour la profondeur du crâne.
REMARQUE: Seule la méthode point par point peut être effectuée à l’aide de la méthode pulsée en raison de contraintes logicielles et mécaniques. Le forage horizontal continu ne peut pas être effectué de cette façon. - Percez tous les points de départ et de bord à l’aide de cette méthode détaillée ci-dessus. Assurez-vous de définir Dura à l’aide du bouton dans le menu Drill une fois que la dura a été atteinte.
- Pour effectuer un perçage manuel par impulsions, désactivez la fonction d’arrêt automatique en décochant la case en regard de l’option Arrêt automatique dans le menu Percer. Celui-ci doit être désactivé afin de permettre de contrôler quand le perceur est éteint pour la pulsation.
- Assurez-vous que Craniotomy-Shape est choisi dans la liste déroulante Drill en haut de l’écran. Cliquez ensuite sur Sélectionner le centre de perçage et la forme et choisissez la cible prédéfinie nommée à l’étape 2.3.1. Sous cet écran, sélectionnez Cercle comme forme de la cible et entrez 2,60 mm comme diamètre2 du cercle. Cliquez sur Afficher.
7. Perfusion et extraction cérébrale
- Une fois le forage des points de semence et de bord terminé, garder l’animal sous anesthésie à l’isoflurane pendant 1 heure supplémentaire pour permettre au colorant EB de circuler et d’extravaser à travers la BHE endommagée. Effectuer une perfusion cardiaque pour éliminer le sang ou les liquides des vaisseaux, puis retirer le cerveau pour l’imagerie et l’analyse comme décrit ci-dessous.
- Après la période de circulation EB de 1 h suivant la création de la fenêtre crânienne, injecter un cocktail de kétamine (160 mg/kg) et de xylazine (20 mg/kg) par voie intrapéritonéale dans l’animal. Une fois que vous ne répondez pas, effectuez une perfusion cardiaque.
- Coupez l’abdomen de la souris à l’aide de ciseaux et exposez le cœur en coupant verticalement à travers la cage thoracique et horizontalement à travers le diaphragme. Rétractez la cage thoracique pour voir clairement le cœur. Insérez une aiguille papillon dans le ventricule gauche du cœur et commencez à perfuser 1x solution saline tamponnée au phosphate (PBS) dans tout le corps. Coupez une petite partie de l’oreillette droite du cœur pour relâcher l’accumulation de pression.
- Après 25 ml de 1x PBS a perfusé dans tout le corps, arrêtez la perfusion et décapitez la souris comme moyen secondaire d’euthanasie.
REMARQUE : Assurez-vous d’effectuer la méthode d’euthanasie et/ou de perfusion finale approuvée par l’établissement pour que l’animal isole le cerveau. - De là, extrayez le cerveau du crâne en enlevant l’os et le tissu avec des rongeurs.
- Imagez le cerveau extrait avec un système d’imagerie fluorescente pour observer la quantité d’EB située dans le cerveau autour des sites de forage.
NOTE: EB se lie à l’albumine circulante. Si des dommages vasculaires se produisent dans le cerveau, EB fuira et se liera au tissu cérébral, conduisant à un indicateur visuel clair des dommages.
8. Imagerie et analyse Evans Blue
- Initialisation matérielle
- Allumez l’ordinateur relié au système d’imagerie par fluorescence EB et démarrez le logiciel d’imagerie (voir le tableau des matériaux) pendant que d’autres éléments sont en cours de préparation. Allumez la source lumineuse, la plate-forme et la caméra, dans cet ordre.
- Accédez au logiciel de création d’images et cliquez sur Initialiser sous le Panneau de configuration des acquisitions. Le système et la chambre signaleront du rouge au vert dès que l’initialisation sera terminée.
REMARQUE: Initialisez le système d’imagerie fluorescente EB 30 minutes avant toute imagerie pour permettre à la température de la source lumineuse d’atteindre des niveaux optimaux.
- Imagerie du cerveau
- Placez le cerveau explanté dans un plat transparent au centre de la scène pour l’imagerie.
- Sous le Panneau de contrôle d’acquisition, ajustez les paramètres de l’image. Sélectionnez le temps d’exposition: 1 s; Classage: Moyen; F/Stop: F1; Excitation: 535 à 675 nm; Émission : Cy 5,5; Niveau de la lampe: élevé; et FOV: 5 cm. Laissez le filtre verrouillé et la superposition de photographie et de fluorescence vérifiée. Ces paramètres sont basés sur l’expérience de laboratoire antérieure et d’autres méthodes publiées d’imagerie EB36.
- Chargez les images du système d’imagerie fluorescente EB dans un logiciel de traitement d’images en libre accès (voir le tableau des matériaux) et générez trois régions d’intérêt (ROI) à main levée pour trouver l’intensité fluorescente de l’EB en mesurant le rayonnement moyen sur l’arrière-plan, le cerveau entier et la fenêtre crânienne.
- Normalisez la fenêtre crânienne et les mesures du cerveau entier par rapport au retour sur investissement de fond correspondant.
- Imagez chaque cerveau sous différents filtres d’excitation (535-675 nm) pour trouver la longueur d’onde avec le rapport signal sur bruit le plus élevé (605 nm a été choisi) entre les groupes expérimentaux au contrôle salin.
- Isoler le rayonnement moyen sous la longueur d’onde et la moyenne appropriées pour obtenir le rayonnement moyen ou l’intensité fluorescente pour l’ensemble du cerveau et les ROI de la fenêtre crânienne.
- Trouver et normaliser le rayonnement moyen sur la surface de la fenêtre crânienne pour chaque groupe par rapport au contrôle salin.
9. Évaluation du thermocouple
- Mesurer les changements de température du crâne et du cerveau à l’aide d’un thermocouple (voir le tableau des matériaux) en combinaison avec les trois schémas de forage différents. Le thermocouple est connecté à un système d’acquisition de données (DAQ) qui permet de lire la mesure dans MATLAB.
- Montez une souris de cadavre sur le cadre stéréotaxique et la configuration de la perceuse robotisée. Percez manuellement un petit trou (de la même taille que le point de semence) ~2 mm de l’endroit où la fenêtre crânienne sera faite dans le côté du crâne25. Ce trou permettra de glisser le thermocouple en position sous laquelle le perçage de la fenêtre crânienne se produit (Figure 2D).
REMARQUE: Les souris cadavres sont utilisées parce que le forage ouvert du côté du crâne est nécessaire pour faire glisser le thermocouple sur la région de forage de la fenêtre crânienne. Cette souris cadavre est un animal différent de celui utilisé précédemment pour l’analyse Evans Blue. - Commencez le processus de forage pour chacun des trois schémas, comme indiqué précédemment (étape 6). Au fur et à mesure que la perceuse traverse le crâne, il y aura des pics de changement de température, indiquant un échauffement se produisant près du cerveau.
- Enregistrez et tracez les résultats dans MATLAB pour calculer la différence de température maximale. Cela devrait être fait séparément pour le forage de semences et le forage de bord afin d’évaluer le forage horizontal par rapport au forage point par point ainsi que la méthode de forage manuel pulsé.
10. Statistiques
- Effectuer une analyse statistique pour l’imagerie fluorescente par thermocouple et EB dans R à l’aide d’un test de somme de rang de Kruskal-Wallis avec correction de Benjamini-Hochberg suivi de comparaisons par paires à l’aide du test exact de somme de rang de Wilcoxon25.
Access restricted. Please log in or start a trial to view this content.
Résultats
Évaluation thermique
Le potentiel de dommages thermiques a été évalué en mesurant le changement de température par rapport à la ligne de base dû au forage à l’aide de méthodes horizontales (figure 2A), point par point (figure 2B) et pulsées point par point (figure 2C). La figure 2D montre la configuration expérimentale pour obtenir des données thermiques. Une taille d?...
Access restricted. Please log in or start a trial to view this content.
Discussion
L’utilisation du colorant EB et de l’imagerie est simple, rapide et utile pour évaluer les dommages vasculaires dans le cerveau pour de nouvelles méthodes et techniques. Qu’il s’agisse d’utiliser un robot chirurgical ou de confirmer les méthodes actuellement utilisées en laboratoire, il est important de valider les méthodes chirurgicales pour isoler les effets des traitements expérimentaux par rapport à l’impact chirurgical et améliorer le bien-être animal. Une configuration de thermocouple est égal...
Access restricted. Please log in or start a trial to view this content.
Déclarations de divulgation
Les auteurs n’ont aucun conflit d’intérêts à signaler. Le contenu ne représente pas les points de vue du Département des anciens combattants des États-Unis, des National Institutes of Health ou du gouvernement des États-Unis.
Remerciements
Cette étude a été financée en partie par les bourses d’évaluation du mérite GRANT12418820 (Capadona) et GRANTI01RX003420 (Shoffstall/Capadona), et la bourse de carrière scientifique de recherche # GRANT12635707 (Capadona) du Service de recherche et de développement en réadaptation du ministère des Anciens Combattants des États-Unis. De plus, ce travail a également été soutenu en partie par le National Institute of Health, le National Institute of Neurological Disorders and Stroke GRANT12635723 (Capadona) et le National Institute for Biomedical Imaging and Bioengineering, T32EB004314, (Capadona/Kirsch). Ce matériel est basé sur des travaux soutenus par la National Science Foundation Graduate Research Fellowship sous le numéro de subvention GRANT12635723. Toute opinion, constatation, conclusion ou recommandation exprimée dans ce document est celle de l’auteur (s) et ne reflète pas nécessairement les points de vue de la National Science Foundation.
Access restricted. Please log in or start a trial to view this content.
matériels
| Name | Company | Catalog Number | Comments |
| 1x Phosphate Buffered Saline Type: Reagent | VWR | MRGF-6235 | For Evans Blue dilution |
| Aura Software Type: Tool | Spectral Instruments Imaging | Open access imaging processing software for Lumina imaging sytems | |
| Buprenorphine Type: Drug | Sourced from Animal Facility | ||
| Carbide Drill Bit, 0.6mm (Robot Drill) Type: Tool | Stoelting | 58640-1 | |
| Carprofen Type: Drug | Sourced from Animal Facility | ||
| Cefazolin Type: Drug | Sourced from Animal Facility | ||
| Evans Blue Dye Type: Reagent | Millipore Sigma | E2129 | Reconstituted in 1x phosphate-buffered saline |
| Isoflurane Type: Drug | Sourced from Animal Facility | ||
| IVIS Lumina II Type: Tool | Perkin Elmer | CLS136334 | IVIS Lumina III currently in place of Lumina II on the market |
| Jenco Linearizing Thermometer Type: Tool | Jenco | 765JF | For Thermocouple setup |
| Ketamine Type: Drug | Sourced from Animal Facility | ||
| LivingImage Type: Tool | Perkin Elmer | Software for IVIS Lumina III | |
| Marcaine Type: Drug | Sourced from Animal Facility | ||
| Neurostar Software Type: Tool | Stoelting | Comes with surgical robot purchase | |
| Physiosuite with MouseSTAT® Pulse Oximeter & Heart Rate Monitor Type: Tool | Kent Scientific | PS-03 | Used to monitor vitals |
| PrismPlus mice Type: Animal | Jackson Labortory | 031478, RRID:IMSR_JAX:031478, Male, ~8 months old | Animals used for the study |
| Stoelting Drill and Injection Robot for Motorized Stereotaxic Instruments Type: Tool | Stoelting | 58640 | Main robotic drill with stereotaxic frame |
| Thermocouple Type: Tool | TC Direct | 206-557 | For Thermocouple setup |
| USB-6008 Multifunction I/O DAQ Type: Tool | National Instruments | USB-6008 | For Thermocouple setup |
| Xylazine Type: Drug | Sourced from Animal Facility |
Références
- Kilic, K., et al. Chronic cranial windows for long term multimodal neurovascular imaging in mice. Frontiers in Physiology. 11, 612678(2020).
- Goldey, G. J., et al. Removable cranial windows for long-term imaging in awake mice. Nature Protocols. 9 (11), 2515-2538 (2014).
- Augustinaite, S., Kuhn, B. Intrinsic optical signal imaging and targeted injections through a chronic cranial window of a head-fixed mouse. STAR Protocols. 2 (3), 100779(2021).
- Wang, X., et al. A skull-removed chronic cranial window for ultrasound and photoacoustic imaging of the rodent brain. Frontiers in Neuroscience. 15, 673740(2021).
- Wang, Y., Xi, L. Chronic cranial window for photoacoustic imaging: a mini review. Visual Computing for Industry, Biomedicine, and Art. 4 (1), 15(2021).
- Augustinaite, S., Kuhn, B. Chronic cranial window for imaging cortical activity in head-fixed mice. STAR Protocols. 1 (3), 100194(2020).
- Kunori, N., Takashima, I. An implantable cranial window using a collagen membrane for chronic voltage-sensitive dye imaging. Micromachines. 10 (11), 789(2019).
- Beckmann, L., et al. Longitudinal deep-brain imaging in mouse using visible-light optical coherence tomography through chronic microprism cranial window. Biomedical Optics Express. 10 (10), 5235-5250 (2019).
- Heo, C., et al. A soft, transparent, freely accessible cranial window for chronic imaging and electrophysiology. Scientific Reports. 6, 27818(2016).
- Holtmaat, A., et al. Imaging neocortical neurons through a chronic cranial window. Cold Spring Harbor Protocols. 2012 (6), 694-701 (2012).
- Holtmaat, A., et al. high-resolution imaging in the mouse neocortex through a chronic cranial window. Nature Protocols. 4 (8), 1128-1144 (2009).
- Sundaram, G. S., et al. Characterization of a brain permeant fluorescent molecule and visualization of Abeta parenchymal plaques, using real-time multiphoton imaging in transgenic mice. Organic Letters. 16 (14), 3640-3643 (2014).
- Spires, T. L., et al. Dendritic spine abnormalities in amyloid precursor protein transgenic mice demonstrated by gene transfer and intravital multiphoton microscopy. Journal of Neuroscience. 25 (31), 7278-7287 (2005).
- Price, D. L., et al. High-resolution large-scale mosaic imaging using multiphoton microscopy to characterize transgenic mouse models of human neurological disorders. Neuroinformatics. 4 (1), 65-80 (2006).
- Kimchi, E. Y., Kajdasz, S., Bacskai, B. J., Hyman, B. T. Analysis of cerebral amyloid angiopathy in a transgenic mouse model of Alzheimer disease using in vivo multiphoton microscopy. Journal of Neuropathology and Experimental Neurology. 60 (3), 274-279 (2001).
- Hyman, B. T. The natural history of Alzheimer disease dissected through multiphoton imaging of transgenic mice. Alzheimer Disease and Associated Disorders. 20 (4), 206-209 (2006).
- Korzhova, V., et al. Long-term dynamics of aberrant neuronal activity in awake Alzheimer's disease transgenic mice. Communications Biology. 4 (1), 1368(2021).
- Chawda, C., McMorrow, R., Gaspar, N., Zambito, G., Mezzanotte, L. Monitoring immune cell function through optical imaging: a review highlighting transgenic mouse models. Molecular Imaging and Biology. 24 (2), 250-263 (2022).
- Courtin, J., et al. A neuronal mechanism for motivational control of behavior. Science. 375 (6576), (2022).
- Mostany, R., Portera-Cailliau, C. A craniotomy surgery procedure for chronic brain imaging. Journal of Visualized Experiments. (12), e680(2008).
- Cramer, S. W., et al. Through the looking glass: A review of cranial window technology for optical access to the brain. Journal of Neuroscience Methods. 354, 109100(2021).
- Eles, J. R., Vazquez, A. L., Kozai, T. D. Y., Cui, X. T. Meningeal inflammatory response and fibrous tissue remodeling around intracortical implants: An in vivo two-photon imaging study. Biomaterials. 195, 111-123 (2019).
- Jorfi, M., Skousen, J. L., Weder, C., Capadona, J. R. Progress towards biocompatible intracortical microelectrodes for neural interfacing applications. Journal of Neural Engineering. 12 (1), 011001(2015).
- Cole, J. T., et al. Craniotomy: true sham for traumatic brain injury, or a sham of a sham. Journal of Neurotrauma. 28 (3), 359-369 (2011).
- Shoffstall, A. J., et al. Potential for thermal damage to the blood-brain barrier during craniotomy: implications for intracortical recording microelectrodes. Journal of Neural Engineering. 15 (3), 034001(2018).
- Saunders, N. R., Dziegielewska, K. M., Mollgard, K., Habgood, M. D. Markers for blood-brain barrier integrity: how appropriate is Evans blue in the twenty-first century and what are the alternatives. Frontiers in Neuroscience. 9, 385(2015).
- Wang, H. L., Lai, T. W. Optimization of Evans blue quantitation in limited rat tissue samples. Scientific Reports. 4, 6588(2014).
- Goss-Varley, M., et al. Microelectrode implantation in motor cortex causes fine motor deficit: Implications on potential considerations to Brain Computer Interfacing and Human Augmentation. Scientific Reports. 7 (1), 15254(2017).
- Oomoto, I., et al. Protocol for cortical-wide field-of-view two-photon imaging with quick neonatal adeno-associated virus injection. STAR Protocols. 2 (4), 101007(2021).
- Dougherty, J. D., Zhang, J., Feng, H., Gong, S., Heintz, N. Mouse transgenesis in a single locus with independent regulation for multiple fluorophores. PLoS One. 7 (7), 40511(2012).
- Jung, S., et al. Analysis of fractalkine receptor CX(3)CR1 function by targeted deletion and green fluorescent protein reporter gene insertion. Molecular and Cellular Biology. 20 (3), 4106-4114 (2000).
- Kiyatkin, E. A., Sharma, H. S. Permeability of the blood-brain barrier depends on brain temperature. Neuroscience. 161 (3), 926-939 (2009).
- Eriksson, A. R., Albrektsson, T. Temperature threshold levels for heat-induced bone tissue injury: a vital-microscopic study in the rabbit. The Journal of Prosthetic Dentistry. 50 (1), 101-107 (1983).
- Bonfield, W., Li, C. H. The temperature dependence of the deformation of bone. Journal of Biomechanics. 1 (4), 323-329 (1968).
- Hrapkiewicz, K., Medina, L. Clinical Laboratory Animal Medicine, second ed. , Blackwell Publishing. Ames Iowa. (2007).
- McLean, R., Moritz, A. R., Roos, A. Studies of thermal Injury. VI. Hyperpotassemia caused by cutaneous exposure to excessive heat. Journal of Clinical Investigations. 26 (3), 497-504 (1947).
- Kyweriga, M., Sun, J., Wang, S., Kline, R., Mohajerani, M. H. A large lateral craniotomy procedure for mesoscale wide-field optical imaging of brain activity. Journal of Visualized Experiments. (123), e52642(2017).
Access restricted. Please log in or start a trial to view this content.
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationExplorer plus d’articles
This article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.