
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
منهج في تقييم توقيت ودقة الردود الإرادية للسيارات لVibrotactile المحفزات
In This Article
Summary
توضح هذه المقالة تقنية لتطبيق محفزات vibrotactile في الفخذ أحد المشاركين البشري، وقياس دقة وفترة رد الفعل استجابة المشاركين الإرادية لمجموعات مختلفة من موقع التحفيز والتردد.
Abstract
Artificial sensory feedback (ASF) systems can be used to compensate for lost proprioception in individuals with lower-limb impairments. Effective design of these ASF systems requires an in-depth understanding of how the parameters of specific feedback mechanism affect user perception and reaction to stimuli. This article presents a method for applying vibrotactile stimuli to human participants and measuring their response. Rotating mass vibratory motors are placed at pre-defined locations on the participant's thigh, and controlled through custom hardware and software. The speed and accuracy of participants' volitional responses to vibrotactile stimuli are measured for researcher-specified combinations of motor placement and vibration frequency. While the protocol described here uses push-buttons to collect a simple binary response to the vibrotactile stimuli, the technique can be extended to other response mechanisms using inertial measurement units or pressure sensors to measure joint angle and weight bearing ratios, respectively. Similarly, the application of vibrotactile stimuli can be explored for body segments other than the thigh.
Introduction
ردود الفعل الحسية الاصطناعي (ASF) يمكن تعريفها بأنها ممارسة تقديم المعلومات البيولوجية في الوقت الحقيقي للأفراد، في كثير من الأحيان التعويض عن استقبال الحس العميق للخطر أو غيرها من آليات الحسية. وقد استخدم ASF طويلة في مجال تأهيل الأشخاص المصابين أو تعطيل للمساعدة في شفاء من جوانب وظيفة البدنية والحركة 1-3، يسمح للأفراد للسيطرة على العمليات الفيزيائية التي كانت استجابة لا إرادية في الجهاز العصبي اللاإرادي 4. فئة فرعية من ASF، الارتجاع البيولوجي النشاط الحيوي، يستخدم أجهزة الاستشعار الخارجية للقياس المعلمات المتعلقة التوازن أو مشية الكينماتيكا، وإيصال هذه المعلومات إلى الفرد من خلال نوع من التحفيز التطبيقية. نهج شعبية متزايدة لردود الفعل النشاط الحيوي يستخدم محركات صغيرة تهتز، أو tactors، وضعت في أجزاء مختلفة من الجسم لتوفير المكانية، فضلا عن ردود الفعل الزمني. وقد أظهرت الدراسات السابقة صromising النتائج تدعم استخدام ردود الفعل vibrotactile في تطبيقات للأفراد مع بتر سفلى للأطراف العاهات الدهليزي، وفقدان التوازن 5 ذات الصلة الشيخوخة - 9.
فهم شامل لآليات السيطرة على تصور الفرد والاستجابة للمؤثرات معينة ضروري للإعلام التنفيذ الفعال لنظم محامون بلا حدود لمختلف التطبيقات. للوقوف على آرائهم vibrotactile، ومن أهم هذه الآليات واستقبال الحس العميق والاستجابة الحسية، وتحديدا حساسية المستخدم إلى الاهتزازات التطبيقية والوقت اللازم لتنفيذ رد فعل المطلوب. يجب ترميز أي المعلومات الحسية ترسل من خلال المحفزات اهتزاز، مجموعات محددة من التردد والاهتزاز، والسعة، والموقع، والتسلسل. ولذلك، ينبغي تصميم نظم محامون بلا حدود vibrotactile اختيار مجموعات من المعلمات لتحقيق أقصى قدر من الإدراك المستخدم وتفسير المحفزات، كماكذلك السرعة والدقة في الاستجابة الحركية الناتجة عن ذلك. والهدف من هذا البروتوكول هو توفير منصة يمكن من خلالها تقييم أوقات الاستجابة ودقة الاستجابة للمؤثرات المختلفة الذبذبات إبلاغ تصميم نظم محامون بلا حدود للاستخدام مع مختلف السكان الحسي ضعاف.
الطرق وصفت هنا يبني على بحث سابق استكشاف الإدراك البشري من اللمس وvibrotactile ردود الفعل 3،5،6، والتي أعدت للاستعمال في اثنين من دراسات سابقة 10،11. في دراستين الأخيرة استخدمت هذا البروتوكول لدراسة آثار تردد الاهتزاز والموقع على دقة وتوقيت استجابات المستخدم في مبتوري الأطراف السفلي الأطراف الاصطناعية، والتي تبين أن كلا من المعلمات تؤثر تأثيرا كبيرا على مقاييس النتائج، وأنه على درجة عالية من الدقة استجابة يمكن أن يكون تحقق. هذه النتائج يمكن استخدامها لإبلاغ وضع مثالي من tactors في الدراسات المستقبلية والتطبيقات السريرية للأنظمة vibrotactile ASF. عمل مؤخرا الآخرين من خلالبجمعية العقارات وآخرون. 12 فحص حساسية المستخدم للتغيرات في أنماط الاهتزاز تطبيقها في الفخذ أثناء المشي، وذلك باستخدام الردود اللفظية للدلالة على التغيرات ينظر إلى أنماط الاهتزاز، بدلا من الاستجابة الحركية. في حين أن هذه الاستجابات اللفظية يمكن استخدامها لقياس دقة الكشف، وأنها لا تأخذ في الحسبان الأخطاء والتأخير التي قد تكون موجودة في عملية التحكم في المحركات.
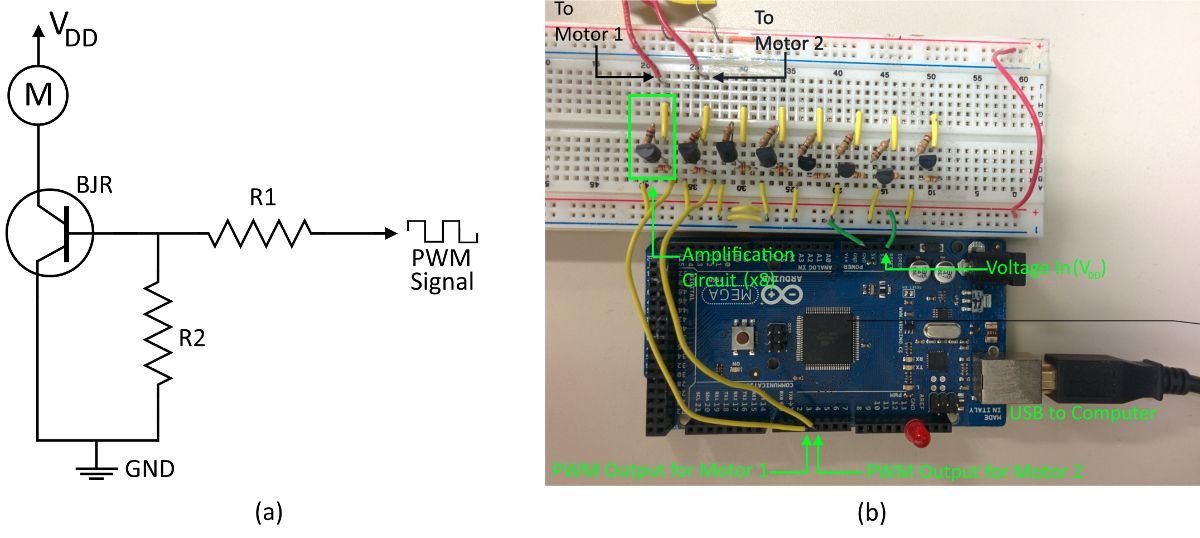
الإعداد الأساسي للالتجارب التالية يتكون من عدد من اهتزازات في المحركات متصلة نبض-التضمين عرض دبابيس الإخراج من لوحة متحكم. والمجلس هو، بدوره، السيطرة عليها من خلال اتصال الناقل التسلسلي العالمي (USB) إلى كمبيوتر يعمل بنظام التشغيل المتاحة تجاريا تصميم البرمجيات النظام. تتطلب المحركات دائرة تضخيم إضافية لضمان ما يكفي من الجهد ويتم تزويد التيار على نطاق واسع من الترددات الاهتزاز. يظهر دائرة سبيل المثال مكبر للصوت في الشكل 1. الترانزستور تقاطع بين القطبين (BJR) في الشكل يمكن استبدالها مع أصغر معدن أكسيد أشباه الموصلات حقل التأثير الترانزستور (MOSFET) للعمل أكثر كفاءة وحجم أصغر. وبالمثل، يمكن استبدال الدائرة تضخيم بالكامل من قبل سائق السيارات لمسي خارج الجاهزة للاستخدام لتوفير رقابة إضافية وتخفيض حجم. يتطلب كل محرك الدائرة الخاصة بها، واستخدام المعدات المذكورة في هذه الورقة، ما يصل إلى عشرة محركات يمكن السيطرة عليها من قبل مجلس متحكم واحد.

ويظهر الشكل 1. موتور الأسلاك. (أ) الدائرة التضخيم لمحرك الاهتزاز واحد. يتطلب كل محرك دائرة منفصلة ويجب أن تكون متصلا إلى منفذ إخراج PWM فريد من نوعه على متحكم. هنا يمثل V DD 3.3 V الطاقة المزودة من قبل مجلس متحكم، والمقاوم يخدم R2 باعتباره مقاوما المنسدلة لضمان التبديل الترانزستور لا يزال مفتوحا عند الصفر الجهد هو التطبيقكذب. (ب) مثال على الأسلاك المادي لاثنين من المحركات. على الرغم من أن يتم عرض ثمانية الدوائر التضخيم الفردية، وترتبط اثنين فقط لمحركات الاهتزاز. في هذا البروتوكول R1 = 4.7 أوم و R2 = 100 أوم. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protocol
وتمت الموافقة على بروتوكول التالية من قبل المجلس أخلاقيات الأبحاث في مستشفى هولندا Bloorview الاطفال لإعادة التأهيل.
1. موتور المعايرة
- ربط مجلس متحكم إلى جهاز الكمبيوتر باستخدام منفذ USB.
- باستخدام برنامج متحكم الأصلي، وتحميل البرامج النصية المخصصة، "Motor_and_AccelerometerTest.ino" إلى المجلس باستخدام وصلة USB عن طريق النقر على "تحميل" الرمز، الرمز بواسطة السهم الأيمن دائري.
- تأكد من أن يتم تعيين مستوى الاهتزاز إلى الصفر لوضع المحرك في خارج الموقف باستخدام "analogWrite" القيادة. رمز يجب قراءة "analogWrite (vibe1،0)؛".
- في رمز متحكم، حدد نبض عرض التضمين (PWM) إخراج دبوس المقابلة للمحرك من الفائدة عن طريق تهيئة "vibe1" متغير.
ملاحظة: إشارات PWM تولد مخرجات التناظرية التقريبية من الإشارات الرقمية التي تم إنشاؤها بواسطة متحكم. دبابيس هي labeleد عدديا على متن متحكم البدني. على سبيل المثال، إذا كان متصلا المحرك لإخراج PWM دبوس "3"، ثم تأكد من أن "كثافة vibe1 = 3؛" المحدد في التعليمات البرمجية.
- وصل الناتج ض محور التسارع ثلاثي محور واحد من منافذ الإدخال التناظرية من مجلس متحكم، وربط الإيجابية والأرض يؤدي من التسارع إلى 5V والأرض (GND) موانئ مجلس متحكم على التوالي.
- جبل التسارع للمحرك تهتز، وضمان أن لها محور z غير متعامد على سطح مستو من المحرك، كما هو مبين في الشكل 2، ووضع المحرك على سطح صلب.
- فتح ملف "Motor_Calibration.vi" في البرنامج الحصول على البيانات وربط متحكم إلى الكمبيوتر من خلال منفذ USB.
- باستخدام الحقول المتوفرة، حدد المنفذ التسلسلي للمدخلات متحكم، وذلك باستخدام القائمة المنسدلة، فضلا عن معدل أخذ العينات، والأسطواناتنوفمبر من العينات لجمع. ملاحظة: معدل أخذ العينات 500 هرتز هو المعيار لهذه التجارب لمنع التعرجات من البيانات التسارع، وتسجل 1000 العينات عادة.
- باستخدام "Motor_and_Accelerometer.ino" رمز، وتحديد دورة العمل المطلوب من النبضات PWM تزويد المحرك اهتزازي، مرة أخرى باستخدام "analogWrite الأمر"، وإعادة تحميل البرنامج إلى مجلس متحكم التحكم في المحركات (انظر الخطوة 1.1 ). على سبيل المثال، لتعيين عدد النبضات إلى 100، يجب رمز قراءة "analogWrite (vibe1،100)؛". ويبين الجدول 1 القيم PWM ودورات واجب المقابلة.
- باستخدام-تحويل فورييه السريع (الاتحاد الفرنسي للتنس) عرض على واجهة "MotorCalibration.vi"، وتحديد أكبر الذروة وتسجيل قيمة تردد الاهتزاز المقابلة (من المحور الأفقي).
- كرر الخطوات من 1،7-1،8، وتعديل مستويات PWM حتى يتم التوصل إلى التردد المطلوب، وتسجيل كل باي PWM الترددص. على سبيل المثال، إذا استهدفت تردد 100 هرتز، نفذ الخطوات 1،7-1،8 حتى تحدث أكبر الذروة أكثر من علامة 100 هرتز على المحور الأفقي.
ملاحظة: للحصول على محركات الذبذبات المستخدمة في هذا البروتوكول، ينبغي أن الاهتزازات المستهدفة تقع في نطاق 60-400 هرتز لتتناسب بشكل أفضل ترددات رد mechanoreceptors في الجلد وصفها في المؤلفات 5،10،13. - كرر الخطوات من 1.2.2 إلى 1.8 لكل محرك، وتسجيل العلاقة PWM التردد لكل محرك مع جدول بيانات أو القلم والورق يدويا.
- فتح ملف "Experiment_1.vi". لكل محرك، انقر بزر الماوس الأيمن على القائمة المنسدلة تردد واختر "خصائص". تحت علامة التبويب "تحرير العناصر"، استخدم الجدول لدخول الترددات المطلوبة ومستويات PWM المقابلة المحددة في خطوات 1،8-1،9. حدد "موافق" للخروج.
- كرر الخطوة 1.11 لكل ملف واجهة افتراضية (سادسا) من برنامج تصميم النظام لاستخدامها أثناء الاختبار (على سبيل المثال، "Experiment_2.vi "،" Experiment_3.vi "، وما إلى ذلك).

الشكل 2. التسارع الخيالة للسيارات. هي التي شنت على التسارع ثلاثي محور (الأخضر) إلى محرك عملة مع متعامد ض محور لسطح مستو من المحرك للمعايرة. تم تفعيل كل السيارات باستخدام دورات العمل المختلفة، وسجلت ترددات اهتزاز المقابلة من قبل التسارع. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
2. وضع موتورز
- مرة واحدة وقد تم معايرة جميع المحركات (قسم 2)، جبل لهم في الفخذ.
- لتحقيق النتائج الموضحة في هذه المخطوطة، وضع محرك واحد على كل من الأمامي، الخلفي، وسطي، والأسطح الجانبية من الفخذ، ما يقرب من أن يكون في منتصف الطريقتوين المدور الكبير وقمة الفخذ الجانبية (أو النهاية البعيدة للطرف للمبتورين فوق الركبة).
ملاحظة: المواقع المحددة لكل محرك يمكن أن تختلف، اعتمادا على الأسئلة البحثية والمناطق ذات الأهمية، ويمكن أن تتأثر بعوامل التشريحية والفسيولوجية، مثل نوع والمكاني لتوزيع mechanoreceptors في الجلد.
- لتحقيق النتائج الموضحة في هذه المخطوطة، وضع محرك واحد على كل من الأمامي، الخلفي، وسطي، والأسطح الجانبية من الفخذ، ما يقرب من أن يكون في منتصف الطريقتوين المدور الكبير وقمة الفخذ الجانبية (أو النهاية البعيدة للطرف للمبتورين فوق الركبة).
- نعلق المحركات مباشرة على الجلد باستخدام الشريط على الوجهين.
ملاحظة: حلق المنطقة حول كل السيارات ليست ضرورية، ولكن قد يحسن التصاق على الجلد (الشكل 3). للتطبيقات حيث الآثار من الملابس، وبطانة الاصطناعية، أو بعض المواد الأخرى على الإدراك المستخدم ذات أهمية، ووضع المحركات على رأس المواد المذكورة، وليس على الجلد.

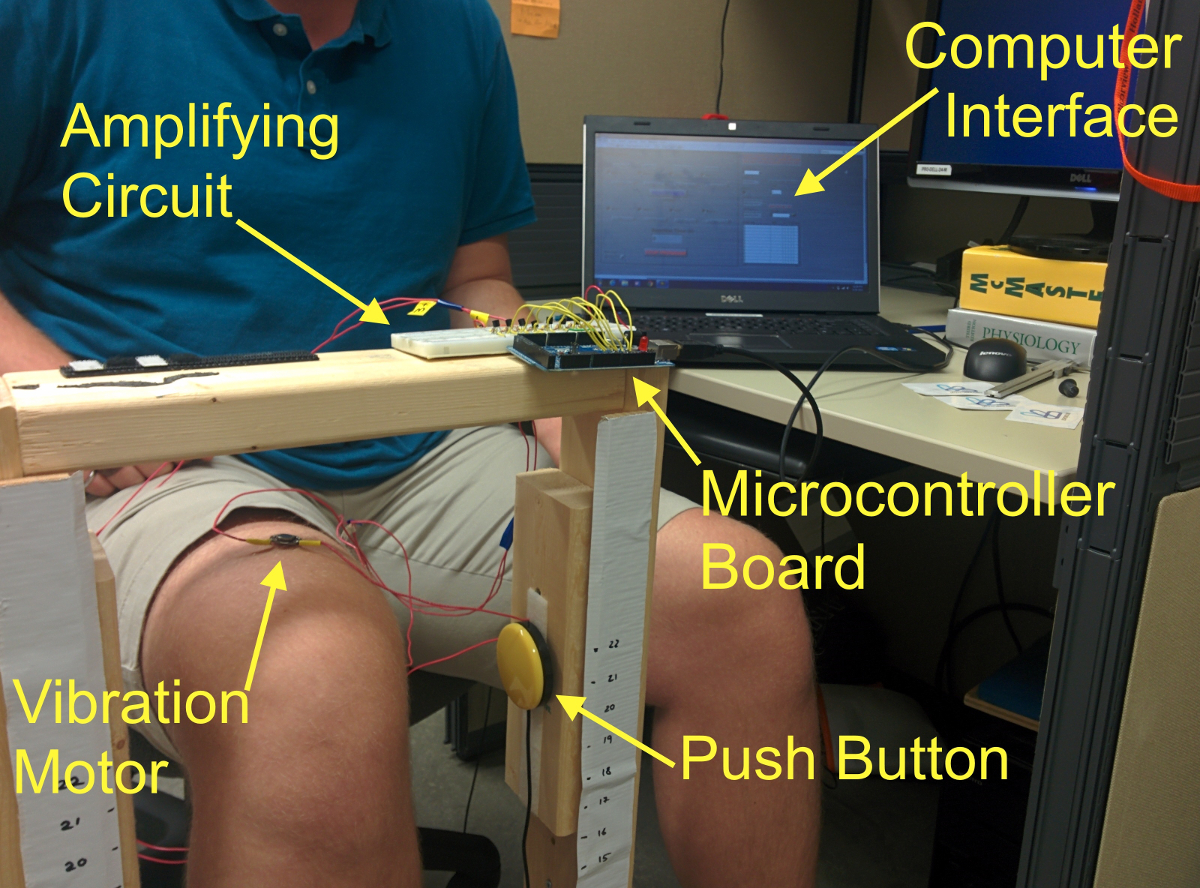
بنيت الرقم 3. اختبار منهاج التجارب. منصة اختبار مخصصة لر المنزلانه متحكم المجالس ودفع أزرار. المحركات يمكن تركيبها مباشرة على الجلد (كما هو موضح)، أو مع بطانة الاصطناعية بين المحرك والجلد. الرجاء النقر هنا لمشاهدة نسخة أكبر من هذا الرقم.
{kind=link}
3. تجربة 1: وضع عجينة من المحفزات وردود الفعل تسجيل وقت
- إعادة فلاش مجلس متحكم مع البرامج الثابتة لتمكين السيطرة على المجلس من خلال البرنامج الحصول على البيانات من خلال فتح ملف "LVIFA_Base.pde" مع مجموعة من البرامج المصاحبة وحدة التحكم، وتكرار الخطوة 1.1، لتحل محل "Motor_and_Accelerometer_Test.ino" مع " LVIFA_Base.pde "النصي.
- ربط الضغط على زر مباشرة إلى أحد منافذ USB لجهاز الكمبيوتر باستخدام موصل المسلسل إلى USB. تأكد من أن يتم تثبيت كافة برامج التشغيل المطلوبة.
- فتح "Experiment_1.vi" واجهة.
- تحديد المسلسلالموانئ لمجلس متحكم متصلا المحركات، والضغط على زر عن طريق اختيار أرقام التعريف المنفذ التسلسلي المقابلة من القوائم المنسدلة المسمى "الإدخال موتور" و "الزر الأخضر"، على التوالي. تحديد أرقام التعريف المنفذ التسلسلي باستخدام نظام التشغيل مدير جهاز فائدة للكمبيوتر.
- حدد الملف لتسجيل النتائج وبدء تشغيل البرنامج.
- حدد المحركات والترددات ليتم تفعيلها عن طريق اختيار من القوائم المنسدلة لكل محرك في واجهة "Experiment_1.vi". هل لديك الصحافة المشاركين الضغط على زر مع المحطة التي يتم تطبيقها ردود الفعل عندما يشعر الاهتزاز. بعد الضغط على الزر، تأكيد استجابة في واجهة البرنامج الحصول على البيانات من قبل مشيرا إلى أن الساعة قد توقف العد، وإعادة المحركات للمحاكمة المقبلة عن طريق اختيار مجموعة جديدة من الترددات من القوائم المنسدلة.
- بمجرد أن تنتهي التجربة، استخدم الدكتورالقوائم opdown للعودة جميع الترددات السيارات إلى مستوى الصفر واختيار زر "البرنامج توقف" لإنهاء الاتصال إلى لوحة التحكم في المحركات.
4. تجربة 2: التمييز بين المحفزات
ملاحظة: يمكن إجراء هذه التجربة بشكل مستقل تماما عن تجربة 1. محرك واحد أو متعددة المحركات يمكن استخدامها. مواقع محددة من المحركات يمكن أن تختلف تبعا للتطبيق والبحوث الأسئلة.
- توصيل الضغط على زر الثاني إلى منفذ USB آخر باستخدام موصل USB المسلسل.
- فتح "Experiment_2.vi" واجهة الحصول على البيانات.
- وضع المحركات في المواقع والتشكيلات اللازمة لتطبيق بحوث محددة. على سبيل المثال، وضع المحركات واحدة على الفخذ، في منتصف الطريق بين المدور الكبير وقمة الفخذ الجانبية (أو النهاية البعيدة للطرف للمبتورين)، على كل من الأمامي، الخلفي، الجانبية، والسطوح وسطي من الفخذ إلى البريدxamine حساسية تردد في كل من هذه الأجزاء من الساق 10،11.
- تحديد المنافذ التسلسلية للمجلس متحكم وكل من أزرار الضغط باستخدام نفس الإجراء الخطوة 3.4. مما لا شك فيه أن نلاحظ التي الضغط على زر تم تعيينه إلى كل منفذ.
- حدد محركات محددة ليتم تفعيلها والتسلسل المطلوب من الترددات من خلال النقر على الرموز "موتور" في واجهة البرنامج. على سبيل المثال، لنفترض أن يجري اختبار ثلاثة ترددات، مثل 140 هرتز، 180 هرتز، و 220 هرتز. سلسلة من الاختبارات قد تكون (1) 180 هرتز تليها 140 هرتز، (2) 220 هرتز تليها 140 هرتز، و (3) 180 هرتز تليها 220 هرتز.
- إدخال تأخير وقت البدء ومدة التحفيز. 1.5 ثانية هو الحال بالنسبة لكل من تأخير والأوقات التحفيز.
- بدء تشغيل البرنامج.
ملاحظة: بعد التأخير المحددة في الخطوة 4.6، سيقوم البرنامج تفعيل المحرك (s) مع تسلسل الترددات يقترن المختار في الخطوة 4.5. على سبيل المثال، إذا كان 180 هرتز مقابل 220 هرتز حد ذاتهاlected في الخطوة 4.5، فإن المحرك المقابلة تهتز لأول مرة في 180 هرتز لمدة محددة قبل أن ينتقل إلى 220 هرتز. - هل لديك الصحافة مشارك واحد من اثنين دفع أزرار لاختيار ما إذا كان تردد ينظر الثاني أعلى أو أقل من الأول. سيتم تلقائيا تسجيل استجابات من قبل البرنامج.
Access restricted. Please log in or start a trial to view this content.
النتائج
ويوضح الشكل 4 منحنيات المعايرة تحديد قيمة PWM لتردد الاهتزاز 180 هرتز من محرك واحد. بدءا من دورة عمل 50٪، وكرر القيم PWM حتى يحدث ارتفاع وتيرة الابتدائي في 180 هرتز. يجب أن تظهر المحاكمات معايرة ناجحة ارتفاع واضح في وتيرة اهتزاز الأساسي. تثبيت الفقراء من التسارع إلى ...
Access restricted. Please log in or start a trial to view this content.
Discussion
والغرض من هذا البروتوكول هو توفير إطار لتقييم المعلمات التحفيز في تطبيقات ASF vibrotactile. على وجه التحديد، فإنه يفحص آثار التردد والاهتزاز، والسعة والموقع وتسلسل على الاستجابة الحسية المستخدم. هذا الإطار يمكن البناء عليها وتوسيعها لدمج أنواع إضافية أو بديلة للاستجابة ا?...
Access restricted. Please log in or start a trial to view this content.
Disclosures
The authors have nothing to disclose.
Acknowledgements
This protocol was developed for research supported by the Natural Sciences and Engineering Research Council of Canada (grant RGPIN 401963).
Access restricted. Please log in or start a trial to view this content.
Materials
| Name | Company | Catalog Number | Comments |
| Vibrating Pager Motors | Precision Microdrives | Model 310-101 | Coin eccentric rotating mass motors. As many as necessary to test all locations and interactions of interest |
| Tri-axis Accelerometer | Dimension Engineering | ADXL 335 | Advanced analog accelerometer. 500 Hz bandwidth, 3.5-15 V input. Designed for motion, tilt, and slope measurement, as well as vibration and shock sensing. |
| Arduino Uno | Arduino | DEV-11021 | Microcontroller board for communicating with the tri-axis accelerometer |
| Arduion Mega 2560 | Arduino | DEV-11061 | Microcontroller board for interfacing with the vibration motors. |
| LabVIEW | National Instruments | Data acquisition software used to control motors and display accelerometer signals | |
| Arduino IDE Software | Arduino | v. 1.6.5 | |
| Push-Button | Bridges | Buddy Button | Wired switch featuring a 2.5 in/6.35 cm activation surface that provides an auditory click and tactile feedback. |
| Optional: | |||
| Dedicated haptic motor driver | Texas Instruments | DRV2605L | Can be used to replace the entire amplification circuit described in Step 1. |
| Flexible wearable goniometer | Biometrics Ltd. | SG110 | Twin axis flexible goniometers to measure angles in up to two planes of movement that can be used in lieu of the push button to measure joint movement in response to stimuli. www.biometricsltd.com/gonio.htm |
References
- Tate, J. J., Milner, C. E. Real-time kinematic, temporospatial, and kinetic biofeedback during gait retraining in patients: a systematic review. Phys. Ther. 90 (8), 1123-1134 (2010).
- Onate, J. A., Guskiewicz, K. M., Sullivan, R. J. Augmented feedback reduces jump landing forces. J. Orthop. Sports Phys. Ther. 31 (9), 511-517 (2001).
- Cholewiak, R. W. The perception of tactile distance: Influences of body site, space, and time. Perception. 28 (7), 851-875 (1999).
- Zhang, Z., Wu, H., Wang, W., Wang, B. A smartphone based respiratory biofeedback system. Proc. 2010 3rd Int. Conf. Biomed. Eng. Informatics. 2, 717-720 (2010).
- Wentink, E. C., Mulder, A., Rietman, J. S., Veltink, P. H. Vibrotactile stimulation of the upper leg: Effects of location, stimulation method and habituation. Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. , 1668-1671 (2011).
- Rusaw, D., Hagberg, K., Nolan, L., Ramstrand, N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss? J. Rehabil. Res. Dev. 49 (8), 1239-1254 (2012).
- Goodworth, A. D., Wall, C., Peterka, R. J. Influence of feedback parameters on performance of a vibrotactile balance prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 17 (4), 397-408 (2009).
- Asseman, F., Bronstein, A. M., Gresty, M. A. Using vibrotactile feedback of instability to trigger a forward compensatory stepping response. J. Neurol. 254 (11), 1555-1561 (2007).
- Fan, R. E., Culjat, M. O., et al. A haptic feedback system for lower-limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 16 (3), 270-277 (2008).
- Sharma, A., Torres-moreno, R., Zabjek, K., Andrysek, J. Toward an artificial sensory feedback system for prosthetic mobility rehabilitation: Examination of sensorimotor responses. J. Rehabil. Res. Dev. 51 (6), 416-425 (2014).
- Sharma, A., Leineweber, M. J., Andrysek, J. The effects of cognitive load and prosthetic liner on volitional response times to vibrotactile feedback. J. Rehabil. Res. Dev. , (2016).
- Crea, S., Cipriani, C., Donati, M., Carrozza, M. C., Vitiello, N. Providing Time-Discrete Gait Information by Wearable Feedback Apparatus for Lower-Limb Amputees: Usability and Functional Validation. IEEE Trans. Neural Syst. Rehabil. Eng. 23 (2), 250-257 (2015).
- Bolanowski, S. J., Gescheider, G. A., Verrillo, R. T., Checkosky, C. M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 84 (5), 1680-1694 (1988).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. J. Neuroeng. Rehabil. 10 (1), 60(2013).
- Shull, P. B., Jirattigalachote, W., Hunt, M. A., Cutkosky, M. R., Delp, S. L. Quantified self and human movement: A review on the clinical impact of wearable sensing and feedback for gait analysis and intervention. Gait Posture. 40 (1), 11-19 (2014).
- Goodworth, A. D., Peterka, R. J. Sensorimotor integration for multisegmental frontal plane balance control in humans. J. Neurophysiol. 107 (1), 12-28 (2012).
Access restricted. Please log in or start a trial to view this content.
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved