
É necessária uma assinatura da JoVE para visualizar este conteúdo. Faça login ou comece sua avaliação gratuita.
Method Article
Um método para avaliar pontualidade e precisão das respostas Volitional motor para vibrotátil Estímulos
Neste Artigo
Resumo
Este artigo descreve uma técnica para a aplicação de estímulos por vibração para a coxa de um participante humano, e medindo a precisão e tempo de reacção de resposta da vontade do participante para várias combinações de localização e frequência de estimulação.
Resumo
Artificial sensory feedback (ASF) systems can be used to compensate for lost proprioception in individuals with lower-limb impairments. Effective design of these ASF systems requires an in-depth understanding of how the parameters of specific feedback mechanism affect user perception and reaction to stimuli. This article presents a method for applying vibrotactile stimuli to human participants and measuring their response. Rotating mass vibratory motors are placed at pre-defined locations on the participant's thigh, and controlled through custom hardware and software. The speed and accuracy of participants' volitional responses to vibrotactile stimuli are measured for researcher-specified combinations of motor placement and vibration frequency. While the protocol described here uses push-buttons to collect a simple binary response to the vibrotactile stimuli, the technique can be extended to other response mechanisms using inertial measurement units or pressure sensors to measure joint angle and weight bearing ratios, respectively. Similarly, the application of vibrotactile stimuli can be explored for body segments other than the thigh.
Introdução
feedback sensorial artificial (ASF) pode ser definida como a prática de fornecer em tempo real informação biológica para indivíduos, com frequência compensando propriocepção comprometida ou outro mecanismo sensorial. ASF tem sido muito utilizado no campo da reabilitação de feridos ou deficientes para ajudar na recuperação de aspectos da função física e movimento 1-3, permitindo que os indivíduos para controlar processos físicos que antes eram uma resposta involuntária do sistema nervoso autônomo 4. Uma subcategoria de ASF, biofeedback biomecânico, usa sensores externos para medir parâmetros relativos ao equilíbrio ou cinemática da marcha, e comunicar essa informação ao indivíduo através de algum tipo de estímulo aplicado. Uma abordagem cada vez mais popular ao feedback biomecânico emprega pequenos motores de vibração, ou tactors, colocados em diferentes partes do corpo para fornecer espacial, bem como o feedback temporal. literatura prévia mostrou promising resultados suportam o uso de feedback vibrotátil em aplicações para indivíduos com amputações de membros inferiores, deficiências vestibulares e relacionadas com o envelhecimento perda de equilíbrio 5-9.
Um profundo conhecimento dos mecanismos que controlam a percepção e resposta de um indivíduo a estímulos específicos é necessário para informar a implementação eficaz dos sistemas de ASF para diferentes aplicações. Para o feedback vibrotátil, chefe entre estes mecanismos são propriocepção e a resposta sensório-motor, especificamente a sensibilidade do usuário para as vibrações aplicadas eo tempo necessário para executar a reação desejada. Qualquer informação sensorial comunicada através de estímulos de vibração deve ser codificado como combinações específicas de frequência de vibração, amplitude, localização e sequência. Portanto, design de sistemas de ASF por vibração deve selecionar combinações de parâmetros para maximizar a percepção do usuário e interpretação dos estímulos, comobem como a pontualidade e precisão da resposta motora resultante. O objetivo deste protocolo é proporcionar uma plataforma a partir da qual para avaliar os tempos de resposta e precisão resposta a vários estímulos vibratórios para informar o desenho de sistemas de ASF para uso com diferentes populações sensório-prejudicada.
Os métodos descritos aqui baseia-se em pesquisas anteriores explorar a percepção humana do tátil e vibrotátil gabarito 3,5,6, e foi desenvolvido para uso em dois estudos anteriores 10,11. Os dois últimos estudos utilizaram este protocolo para examinar os efeitos da frequência de vibração e localização na acurácia e tempestividade das respostas do usuário em amputados de membros inferiores, mostrando que ambos os parâmetros afetar significativamente as medidas de resultados, e que um alto grau de precisão de resposta pode ser conseguida. Estes resultados podem ser usados para informar o posicionamento ideal de tactors em estudos futuros e aplicações clínicas de sistemas vibrotátil ASF. Outro trabalho recente deCrea et al. 12 examinaram a sensibilidade do usuário para mudanças nos padrões de vibração aplicada à coxa durante a caminhada, usando respostas verbais para significar mudanças percebidas para os padrões de vibração, em vez de uma resposta motora. Embora estas respostas verbais podem ser usadas para medir a precisão da detecção, eles não têm em conta os erros e atrasos que podem estar presentes no processo de controlo do motor.
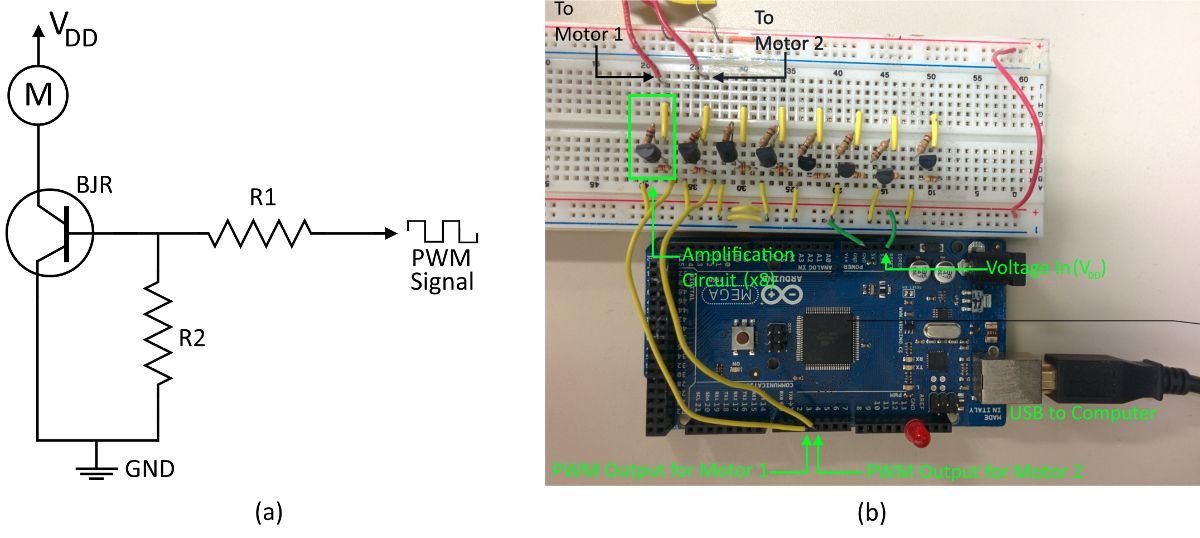
A configuração do primário para as experiências seguintes é constituído por um número de motores de vibração ligados ao pulso modulada com largura pinos de saída de uma placa de microcontrolador. A placa é, por sua vez, controlada através de uma conexão Universal Serial Bus (USB) a um computador com software de design de sistema disponível comercialmente. Os motores requerem um circuito amplificador adicional para assegurar a tensão suficiente e a corrente é fornecida através de uma vasta gama de frequências de vibração. Um circuito de amplificador de exemplo é mostrado na Figura 1. O transistor bipolar de junção (BJR) Na figura pode ser substituída com menor de metal-óxido-semicondutor transistor de efeito de campo (MOSFET) para uma operação mais eficiente e tamanho menor. Da mesma forma, o circuito amplificador inteira pode ser substituída por um condutor do motor háptica off-the-shelf para fornecer controlo suplementar e tamanho reduzido. Cada motor requer o seu próprio circuito, e utilizando os equipamentos enumerados no presente documento, até dez motores podem ser controlados por um único placa do microcontrolador.

Figura 1. O motor de fiação. (A) O circuito de amplificação por um único motor de vibração é mostrado. Cada motor requer um circuito separado e deve ser ligada a uma porta de saída de PWM único no microcontrolador. O V DD aqui representa o poder de 3,3 V fornecida pela placa do microcontrolador, eo resistor R2 serve como um resistente pull-down para garantir o interruptor transistor permanece aberta quando a tensão zero é appmenti. (B) Um exemplo da cablagem física de dois motores. Embora oito circuitos de amplificação individuais são mostradas, apenas dois estão ligados a motores de vibração. Neste protocolo R1 = 4,7 kW e R2 = 100 kW. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protocolo
O seguinte protocolo foi aprovado pelo Conselho de Ética em Pesquisa em Holland Bloorview Rehabilitation Hospital Kids.
1. Motor de calibração
- Ligue a placa do microcontrolador para o computador através de uma porta USB.
- Usando o software microcontrolador original, fazer o upload do script personalizado ", Motor_and_AccelerometerTest.ino" à placa usando a conexão USB, clicando no ícone "Enviar", indicado pela seta para a direita circulou.
- Certifique-se que o nível de vibração é definido como zero para colocar o motor no off-posição usando o comando "analogWrite". O código deve ler "analogWrite (vibe1,0);".
- No código microcontrolador, especificar a largura de pulso modulada pino (PWM) de saída correspondente para o motor de interesse por inicializar a variável "vibe1".
Nota: gerar sinais PWM saídas analógicas aproximados a partir dos sinais digitais gerados pelo microcontrolador. Os pinos são Labeled numericamente na placa de microcontrolador física. Por exemplo, se o motor for ligado à saída de PWM pino de '3', em seguida, assegurar que o "int vibe1 = 3;" é especificada no código.
- Ligue a saída do eixo z do acelerômetro tri-eixo a uma das portas de entrada analógica da placa do microcontrolador, e conecte o positivo e térreo leva a partir do acelerómetro a 5V e portos de terra (GND) da placa do microcontrolador, respectivamente.
- Montar o acelerómetro para o motor de vibração, assegurando que o seu eixo-Z é ortogonal à superfície plana do motor, como mostrado na Figura 2, e colocar o motor sobre uma superfície dura.
- Abra o arquivo "Motor_Calibration.vi" no software de aquisição de dados e conectar o microcontrolador para o computador através de uma porta USB.
- Usando os campos previstos, especificar a porta serial para a entrada de microcontrolador, usando o menu suspenso, bem como a taxa de amostragem, e number de amostras a recolher. Nota: taxa de amostragem de 500 Hz é padrão para estas experiências para evitar aliasing da aceleração de dados, e 1.000 amostras são normalmente gravadas.
- Usando o código "Motor_and_Accelerometer.ino", especifique o ciclo de trabalho desejada dos pulsos PWM fornecida ao motor vibratório, mais uma vez usando o "analogWrite" comando e re-download do programa para o conselho microcontrolador controlar os motores (ver Passo 1.1 ). Por exemplo, para definir o número de pulsos a 100, o código deve ler "analogWrite (vibe1,100);". A Tabela 1 apresenta os valores PWM e seus ciclos de trabalho correspondentes.
- Usando a Transformada de Fourier de exibição Fast-(FFT) na interface "MotorCalibration.vi", identificar o maior pico e registrar o valor da frequência de vibração correspondente (no eixo horizontal).
- Repita os passos 1,7-1,8, ajustando os níveis PWM até que a freqüência desejada seja atingida, registrando cada pai PWM frequênciar. Por exemplo, se a segmentação uma frequência de 100 Hz, execute os passos 1,7-1,8 até que o maior pico ocorre sobre a marca de 100 Hz no eixo horizontal.
Nota: Para os motores vibratórios utilizado no presente protocolo, as vibrações alvo deve estar no intervalo de 60-400 Hz para melhor atender as frequências de resposta dos mecanorreceptores na pele descritos na literatura 5,10,13. - Repita os passos 1.2.2 a 1.8 para cada motor, a gravação manualmente a relação PWM de frequência para cada motor com uma planilha ou lápis e papel.
- Abra o arquivo "Experiment_1.vi". Para cada motor, clique com o botão direito no menu frequência suspensa e selecione "Propriedades". Sob a guia "Editar Itens", use a tabela para entrar nas freqüências desejadas e os níveis de PWM correspondentes determinadas nos Passos 1,8-1,9. Selecione "OK" para sair.
- Repita o passo 1.11 para cada arquivo de interface virtual (VI) do software de design do sistema para ser utilizado durante os testes (por exemplo, "Experiment_2.vi "," Experiment_3.vi ", etc).

Figura 2. acelerómetro montado no motor. O acelerómetro eixo tri (verde) está montado no motor com a sua moeda ortogonal do eixo z com a superfície plana do motor para a calibração. Cada motor foi activada utilizando diferentes ciclos de trabalho, e as freqüências de vibração correspondentes foram registrados pelo acelerómetro. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}
2. Colocar os Motors
- Uma vez que todos os motores têm sido calibrado (seção 2), montá-los para a coxa.
- Para atingir os resultados descritos neste manuscrito, colocar o motor de um em cada uma das faces anterior, posterior, medial, e as superfícies laterais da coxa, aproximadamente a meio caminho sejainterpolar o trocânter maior e côndilo femoral lateral (ou extremidade distal do membro para amputados acima do joelho).
Nota: As localizações específicas de cada motor pode variar, dependendo das questões de pesquisa e as regiões de interesse, e pode ser afectada por factores anatómicos e fisiológicos, tais como o tipo e a distribuição espacial de mecanorreceptores na pele.
- Para atingir os resultados descritos neste manuscrito, colocar o motor de um em cada uma das faces anterior, posterior, medial, e as superfícies laterais da coxa, aproximadamente a meio caminho sejainterpolar o trocânter maior e côndilo femoral lateral (ou extremidade distal do membro para amputados acima do joelho).
- Anexar motores diretamente sobre a pele usando fita dupla face.
Nota: Raspar a região em torno de cada um dos motores não é necessária, mas pode melhorar a sua aderência à pele (Figura 3). Para aplicações em que os efeitos de roupa, um forro de prótese, ou algum outro material sobre a percepção do usuário são de interesse, colocar os motores em cima do referido material, em vez de contra a pele.

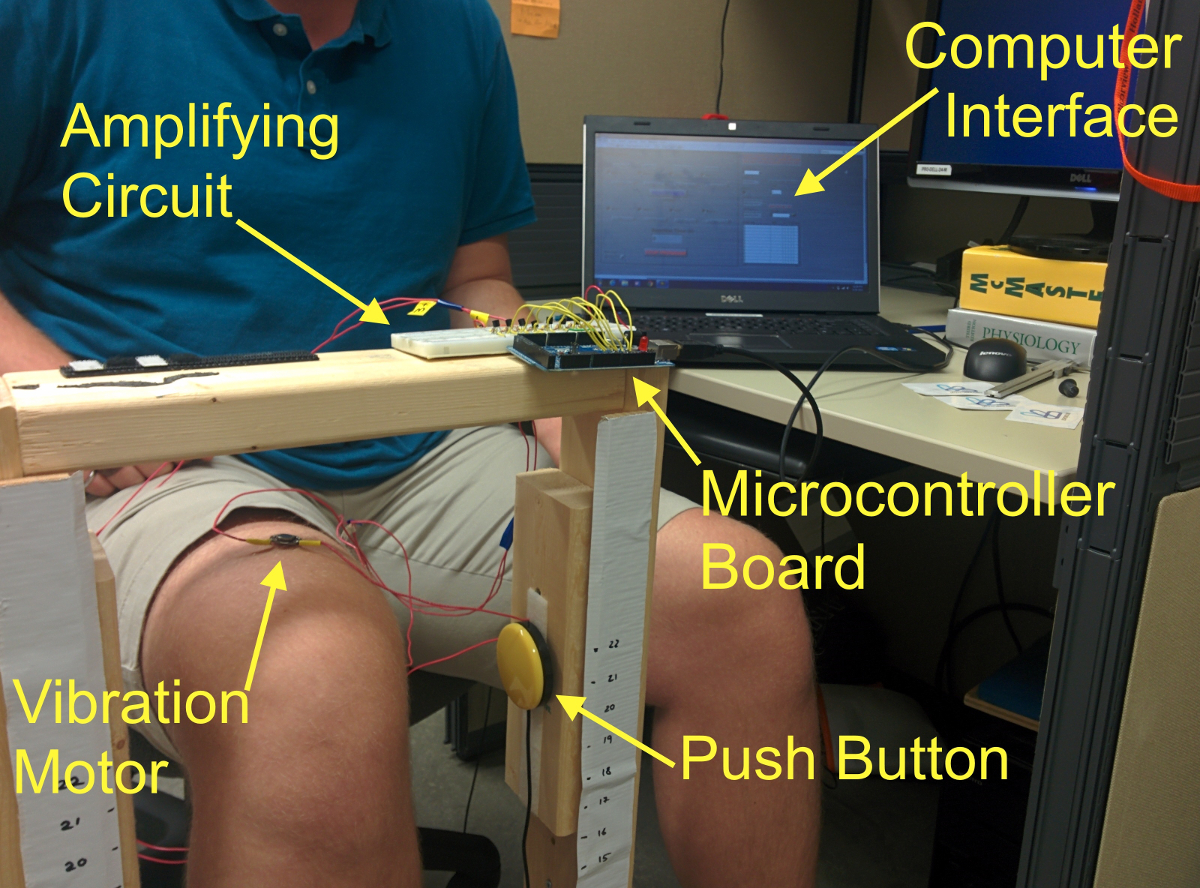
Figura Plataforma 3. Teste de Experimentação. Uma plataforma de teste personalizado foi construído para casa tele microcontrolador placas e botões. Motors pode ser conectado diretamente na pele (como mostrado), ou com um forro de prótese entre o motor e pele. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}
3. Experiência 1: aplicação de estímulos e Reação Tempo de gravação
- Re-flash da placa do microcontrolador com o firmware para permitir o controle do conselho através do software de aquisição de dados, abrindo o arquivo "LVIFA_Base.pde" com o pacote de software que acompanha o controlador, e repetindo o passo 1.1, substituindo "Motor_and_Accelerometer_Test.ino" com o " LVIFA_Base.pde "script.
- Ligue o botão de pressão diretamente a uma das portas USB do computador usando um conector serial-to-USB. Certifique-se que todos os drivers necessários estão instalados.
- Abra a interface "Experiment_1.vi".
- Especifique o número de sérieportas para a placa de microcontrolador ligado aos motores, e de botão, selecionando os números de identificação da porta serial correspondentes nos menus suspensos rotulados como "Motor de Entrada" e "Botão Verde", respectivamente. Identificar os números de identificação de porta serial usando utilitário Gerenciador de Dispositivos do sistema operacional do computador.
- Selecione o arquivo para registrar os resultados e iniciar o programa.
- Selecionar os motores e as frequências de ser activado através da selecção de menus suspensos para cada motor na interface "Experiment_1.vi". Ter a imprensa participante do botão de pressão com a perna em que o feedback é aplicado quando uma vibração é sentida. Depois que o botão foi pressionado, confirme a resposta na interface do software de aquisição de dados, observando que o relógio parou de contagem, e redefinir os motores para a próxima prova, selecionando o novo conjunto de frequências a partir dos menus suspensos.
- Uma vez que o experimento é concluído, utilize o drmenus opdown para retornar todas as frequências do motor para a posição zero e selecione o botão "Programa Stop" para terminar a ligação à placa de controle motor.
4. Experiência 2: A distinção entre estímulos
Nota: Esta experiência pode ser conduzida de forma totalmente independente da Experiência 1. Um único motor ou a vários motores pode ser utilizada. As localizações específicas dos motores pode variar dependendo da aplicação e de investigação perguntas.
- Conecte um segundo botão de pressão para outra porta USB utilizando um conector serial-USB.
- Abra a interface de aquisição de dados "Experiment_2.vi".
- Coloque os motores nas localizações e configurações necessárias para a aplicação de pesquisa específica. Por exemplo, colocar os motores individuais sobre a coxa, a meio caminho entre o trocânter maior e côndilo femoral lateral (ou a extremidade distai do membro para amputados), em cada uma das faces anterior, posterior, lateral, e superfícies mediais da coxa a examine a sensibilidade de frequência em cada uma destas porções de perna 10,11.
- Especificar as portas seriais para a placa de microcontrolador e os dois botões de pressão, usando o mesmo procedimento do passo 3.4. Certifique-se notar que de botão é atribuído a cada porta.
- Selecione os motores específicos a serem activadas e a sequência desejada de frequências, clicando nos ícones "motor" na interface do software. Por exemplo, suponha que três frequências estão a ser testados, tais como 140 Hz, 180 Hz, 220 Hz e. Uma série de ensaios pode ser (1) de 180 Hz seguido de 140 Hz, (2) 220 Hz seguido de 140 Hz, e (3) 180 Hz seguido de 220 Hz.
- Introduza o atraso hora de início e duração da estimulação. 1,5 seg é típico, tanto para o atraso e tempos de estimulação.
- Inicie o programa.
Nota: O após o atraso especificado no Passo 4.6, o programa vai activar o motor (es) com a sequência de frequências emparelhadas escolhidas na etapa 4.5. Por exemplo, se x 180 Hz 220 Hz foi de SEselecionada na etapa 4.5, o motor correspondente irá primeiro vibrar em 180 Hz para o período especificado antes de mudar para 220 Hz. - Ter o participante prima um dos dois botões de accionamento de escolher se a segunda frequência percebida foi maior ou menor do que o primeiro. As respostas serão automaticamente registrados pelo programa.
Access restricted. Please log in or start a trial to view this content.
Resultados
A Figura 4 ilustra as curvas de calibração para identificar o valor PWM para uma frequência de vibração de 180 Hz de um único motor. A partir de um ciclo de trabalho de 50%, os valores de PWM são iterados até o pico de frequência primária ocorre a 180 Hz. ensaios de calibração de sucesso deve mostrar um aumento claro na frequência de vibração primário. Má fixação do acelerómetro ao motor, ou do motor a uma superfície de suporte pode resultar num FFT mais difusa sem um pico claro. Ne...
Access restricted. Please log in or start a trial to view this content.
Discussão
O objectivo deste protocolo é fornecer a estrutura para avaliar parâmetros de estimulação em aplicações ASF por vibração. Especificamente, ele examina os efeitos da frequência de vibração, amplitude, localização e sequência, em resposta ao usuário sensório-motor. Esta estrutura pode ser construída e expandida para incorporar tipos adicionais ou alternativas de resposta do usuário que pode ser mais clinicamente relevante, como dobrar uma articulação ou deslocando o peso de uma perna para outra. Estes ...
Access restricted. Please log in or start a trial to view this content.
Divulgações
The authors have nothing to disclose.
Agradecimentos
This protocol was developed for research supported by the Natural Sciences and Engineering Research Council of Canada (grant RGPIN 401963).
Access restricted. Please log in or start a trial to view this content.
Materiais
| Name | Company | Catalog Number | Comments |
| Vibrating Pager Motors | Precision Microdrives | Model 310-101 | Coin eccentric rotating mass motors. As many as necessary to test all locations and interactions of interest |
| Tri-axis Accelerometer | Dimension Engineering | ADXL 335 | Advanced analog accelerometer. 500 Hz bandwidth, 3.5-15 V input. Designed for motion, tilt, and slope measurement, as well as vibration and shock sensing. |
| Arduino Uno | Arduino | DEV-11021 | Microcontroller board for communicating with the tri-axis accelerometer |
| Arduion Mega 2560 | Arduino | DEV-11061 | Microcontroller board for interfacing with the vibration motors. |
| LabVIEW | National Instruments | Data acquisition software used to control motors and display accelerometer signals | |
| Arduino IDE Software | Arduino | v. 1.6.5 | |
| Push-Button | Bridges | Buddy Button | Wired switch featuring a 2.5 in/6.35 cm activation surface that provides an auditory click and tactile feedback. |
| Optional: | |||
| Dedicated haptic motor driver | Texas Instruments | DRV2605L | Can be used to replace the entire amplification circuit described in Step 1. |
| Flexible wearable goniometer | Biometrics Ltd. | SG110 | Twin axis flexible goniometers to measure angles in up to two planes of movement that can be used in lieu of the push button to measure joint movement in response to stimuli. www.biometricsltd.com/gonio.htm |
Referências
- Tate, J. J., Milner, C. E. Real-time kinematic, temporospatial, and kinetic biofeedback during gait retraining in patients: a systematic review. Phys. Ther. 90 (8), 1123-1134 (2010).
- Onate, J. A., Guskiewicz, K. M., Sullivan, R. J. Augmented feedback reduces jump landing forces. J. Orthop. Sports Phys. Ther. 31 (9), 511-517 (2001).
- Cholewiak, R. W. The perception of tactile distance: Influences of body site, space, and time. Perception. 28 (7), 851-875 (1999).
- Zhang, Z., Wu, H., Wang, W., Wang, B. A smartphone based respiratory biofeedback system. Proc. 2010 3rd Int. Conf. Biomed. Eng. Informatics. 2, 717-720 (2010).
- Wentink, E. C., Mulder, A., Rietman, J. S., Veltink, P. H. Vibrotactile stimulation of the upper leg: Effects of location, stimulation method and habituation. Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. , 1668-1671 (2011).
- Rusaw, D., Hagberg, K., Nolan, L., Ramstrand, N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss? J. Rehabil. Res. Dev. 49 (8), 1239-1254 (2012).
- Goodworth, A. D., Wall, C., Peterka, R. J. Influence of feedback parameters on performance of a vibrotactile balance prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 17 (4), 397-408 (2009).
- Asseman, F., Bronstein, A. M., Gresty, M. A. Using vibrotactile feedback of instability to trigger a forward compensatory stepping response. J. Neurol. 254 (11), 1555-1561 (2007).
- Fan, R. E., Culjat, M. O., et al. A haptic feedback system for lower-limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 16 (3), 270-277 (2008).
- Sharma, A., Torres-moreno, R., Zabjek, K., Andrysek, J. Toward an artificial sensory feedback system for prosthetic mobility rehabilitation: Examination of sensorimotor responses. J. Rehabil. Res. Dev. 51 (6), 416-425 (2014).
- Sharma, A., Leineweber, M. J., Andrysek, J. The effects of cognitive load and prosthetic liner on volitional response times to vibrotactile feedback. J. Rehabil. Res. Dev. , (2016).
- Crea, S., Cipriani, C., Donati, M., Carrozza, M. C., Vitiello, N. Providing Time-Discrete Gait Information by Wearable Feedback Apparatus for Lower-Limb Amputees: Usability and Functional Validation. IEEE Trans. Neural Syst. Rehabil. Eng. 23 (2), 250-257 (2015).
- Bolanowski, S. J., Gescheider, G. A., Verrillo, R. T., Checkosky, C. M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 84 (5), 1680-1694 (1988).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. J. Neuroeng. Rehabil. 10 (1), 60(2013).
- Shull, P. B., Jirattigalachote, W., Hunt, M. A., Cutkosky, M. R., Delp, S. L. Quantified self and human movement: A review on the clinical impact of wearable sensing and feedback for gait analysis and intervention. Gait Posture. 40 (1), 11-19 (2014).
- Goodworth, A. D., Peterka, R. J. Sensorimotor integration for multisegmental frontal plane balance control in humans. J. Neurophysiol. 107 (1), 12-28 (2012).
Access restricted. Please log in or start a trial to view this content.
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados