
JoVE 비디오를 활용하시려면 도서관을 통한 기관 구독이 필요합니다. 전체 비디오를 보시려면 로그인하거나 무료 트라이얼을 시작하세요.
Method Article
촉각 자극에 의지 모터 응답의 적시성과 정확성을 평가하는 방법
요약
이 문서는 인간 참가자의 허벅지 촉각 자극을인가하고, 자극 위치 및 주파수의 다양한 조합에 대한 참가자의 의지 응답의 정확성과 반응 시간을 측정하는 방법을 설명한다.
초록
Artificial sensory feedback (ASF) systems can be used to compensate for lost proprioception in individuals with lower-limb impairments. Effective design of these ASF systems requires an in-depth understanding of how the parameters of specific feedback mechanism affect user perception and reaction to stimuli. This article presents a method for applying vibrotactile stimuli to human participants and measuring their response. Rotating mass vibratory motors are placed at pre-defined locations on the participant's thigh, and controlled through custom hardware and software. The speed and accuracy of participants' volitional responses to vibrotactile stimuli are measured for researcher-specified combinations of motor placement and vibration frequency. While the protocol described here uses push-buttons to collect a simple binary response to the vibrotactile stimuli, the technique can be extended to other response mechanisms using inertial measurement units or pressure sensors to measure joint angle and weight bearing ratios, respectively. Similarly, the application of vibrotactile stimuli can be explored for body segments other than the thigh.
서문
인공 감각 피드백 (ASF)은 종종 손상된 감수 또는 다른 감각기구 보상 개인 실시간 생물학적 정보를 제공하는 사례로 정의 될 수있다. 개인 번 자율 신경계 (4)의 비자발적 반응이었다 물리적 프로세스를 제어 할 수 있도록, 3 - ASF 긴 신체 기능과 움직임 하나의 양태의 회수에 도움이 부상이나 장애인 재활의 영역에 이용되고있다. ASF, 생체 역학 바이오 피드백의 하위 범주는 운동의 균형 또는 보행에 관한 매개 변수를 측정하고,인가 된 자극의 일종을 통해 개인이 정보를 전달하는 외부 센서를 사용합니다. 생체 역학적 피드백에 점점 인기있는 방법은 공간과 시간적인 피드백을 제공하기 위해 신체의 다른 부분에 배치 작은 진동 모터, 또는 tactors를 사용한다. 이전 문헌 페이지를 보여왔다낮은 사지 절단, 전정 장애를 가진 개인에게 응용 프로그램에서 진동 촉각 피드백의 사용을 지원하는 결과를 romising 및 노화 관련 균형 (5)의 손실 - 9.
특정 자극에 개인의 인식과 반응을 제어하는 메커니즘에 대한 철저한 이해는 다른 응용 프로그램에 대한 ASF 시스템의 효과적인 이행을 알리는 필요합니다. 촉각 피드백, 이러한 메커니즘 중 최고는 감수하고 감각 반응 특별히 적용된 진동 사용자 감도 및 원하는 반응을 수행하는 데 필요한 시간이다. 진동 자극을 통해 연통 상관 감각 정보는 특정의 진동 주파수의 조합, 크기, 위치, 시퀀스로서 부호화되어야한다. 따라서, 촉각 ASF 시스템의 설계와 같이 자극의 사용자의 인식 및 해석을 최대화하는 파라미터들의 조합을 선택해야잘 적시성 그 결과 모터 응답의 정확도. 이 프로토콜의 목적은 다른 감각 장애 집단과 함께 사용 ASF 시스템의 설계에 알려 다양한 진동 자극에 대한 반응 시간 및 반응 정도를 평가에서 플랫폼을 제공하는 것이다.
방법은 여기에 설명 촉각 및 진동 촉각 피드백 -3,5,6-의 인간의 지각을 탐구하기 전에 연구를 기반으로, 2 개의 이전 연구 10, 11에 사용하기 위해 개발되었다. 후자의 두 연구는 두 변수가 상당히 결과 측정에 영향을 미치는 것으로 보여 낮은 사지 절단 수술의 정확도 및 사용자 응답의 적시성의 진동 주파수와 위치의 영향을 조사하기 위해,이 프로토콜을 이용하고, 반응 고정밀도가 될 수 있다는 달성했다. 이러한 결과는 향후 연구 및 촉각 ASF 시스템의 임상 적용에 tactors의 이상적인 위치를 알리기 위해 사용될 수있다. 에 의하여 다른 최근 연구크레아 외. (12)은 감지되는 진동 패턴의 변화가 아닌 모터 응답을 의미하는 언어 적 반응을 이용하여, 보행시 허벅지인가 진동 패턴의 변화에 대한 사용자의 민감도를 조사 하였다. 이러한 언어 응답이 검출 정확도를 측정 할 수 있지만, 그것들은 모터 제어 처리에 존재할 수있는 오류 및 지연을 고려하지 않는다.
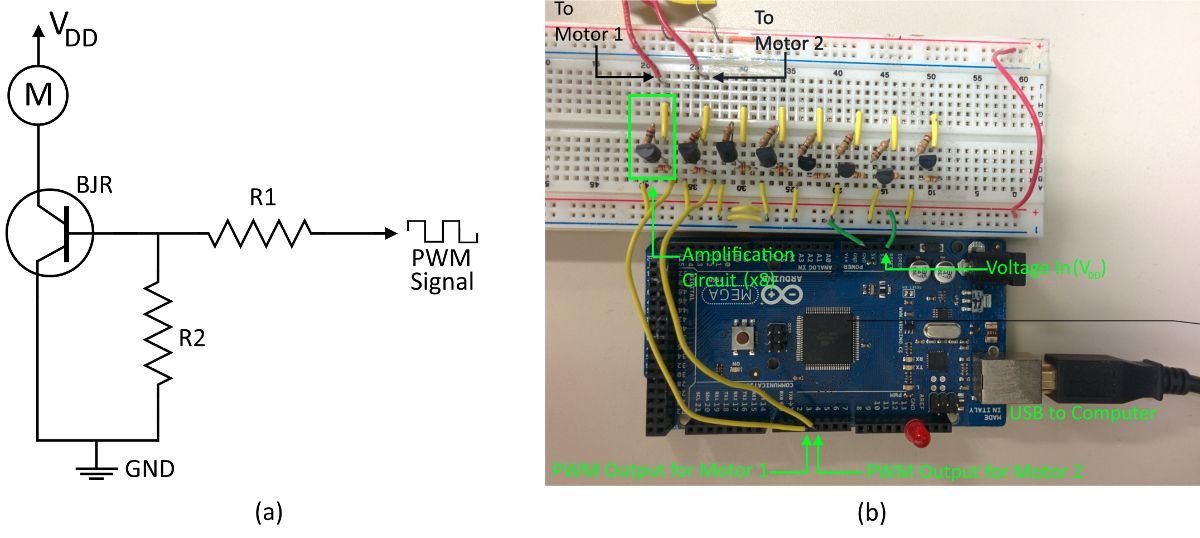
이하의 실험에 대한 기본 설정은 펄스 폭 변조하는 마이크로 컨트롤러 보드의 출력 핀을 접속 진동 모터의 개수로 구성된다. 기판은 다시 시판 시스템 디자인 소프트웨어를 실행하는 컴퓨터의 범용 직렬 버스 (USB) 접속을 통해 제어된다. 모터는 충분한 전압을 보장하기 위해 추가로 증폭 회로를 필요로하며 현재의 진동 주파수의 넓은 범위에 걸쳐 공급된다. 예 증폭 회로는도 1에 도시되어있다. 바이폴라 접합 트랜지스터 (BJR) 도면에보다 효율적인 동작 및 작은 크기의 작은 금속 - 산화물 - 반도체 전계 효과 트랜지스터 (MOSFET)로 대체 될 수있다. 마찬가지로, 전체 증폭 회로는 추가적인 제어 및 감소 된 크기를 제공하는 상용 햅틱 모터 드라이버에 의해 대체 될 수있다. 각 모터는 자체의 회로를 필요로하고, 모터의 최대 열이 논문에 기재된 장치를 사용하여 단일 마이크로 컨트롤러 보드에 의해 제어 될 수있다.

도 1 모터 배선. (A) 하나의 진동 모터를위한 증폭 회로가 도시되어있다. 각 모터는 별도의 회로를 필요로하며, 마이크로 컨트롤러 고유 PWM 출력 포트에 연결되어야한다. 은 V DD 여기서 마이크로 컨트롤러 보드에 의해 공급 된 3.3 V의 전원을 나타내고, 제로 전압 앱 인 경우 R2가 트랜지스터 스위치를 보장하기 위해 풀다운 저항 역할을하는 저항 열려거짓말. (B) 2 개의 모터의 물리적 인 배선의 일례. 여덟 개별 증폭 회로가 도시되었지만, 두 진동 모터에 접속되어있다. 이 프로토콜 R1 = 4.7 kΩ의 및 R2 = 100 kΩ의에서. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
프로토콜
다음 프로토콜은 네덜란드 Bloorview 어린이 재활 병원에서 연구 윤리위원회에 의해 승인되었다.
1. 모터 교정
- USB 포트를 사용하여 컴퓨터에 마이크로 컨트롤러 보드를 연결한다.
- 원래 마이크로 컨트롤러 소프트웨어를 사용하여 원 오른쪽 화살표로 표시 '업로드'아이콘을 클릭하여 USB 연결을 사용하여 보드에 사용자 지정 스크립트, "Motor_and_AccelerometerTest.ino"를 업로드 할 수 있습니다.
- 진동 레벨은 "analogWrite"명령을 사용하여 오프 위치에 모터를 넣어 0으로 설정되어 있는지 확인합니다. 이 코드는 "analogWrite (vibe1,0를);"읽어야합니다.
- 마이크로 코드에서 "vibe1"변수를 초기화하여 관심 모터에 대응 (PWM) 출력 핀 변조 된 펄스 폭을 지정.
주 : PWM 신호는 마이크로 컴퓨터에 의해 생성되는 디지털 신호로부터 근사 아날로그 출력을 생성한다. 핀은 labele있다수치 물리적 마이크로 컨트롤러 보드에 d를. 모터 출력 PWM 핀 '3'에 연결되어있는 경우, 예를 들어, 그 확인 "INT vibe1 = 3;" 코드에 지정되어 있습니다.
- 마이크로 컨트롤러 보드의 아날로그 입력 포트 중 하나에 3 축 가속도 센서의 Z 축 출력을 연결하고, 양극을 연결하고 접지는 각각 마이크로 컴퓨터 기판의 상기 5V의 가속도계와 접지 (GND) 포트로부터 리드.
- 도 2에 도시 된 바와 같이, 그 Z 축 모터의 평탄면에 직교하는 것을 보장하는 진동 모터에 가속도 센서를 장착하고 딱딱한 표면에 모터를 배치했다.
- 데이터 수집 소프트웨어의 "Motor_Calibration.vi"파일을 엽니와 USB 포트를 통해 컴퓨터에 마이크로 컨트롤러를 연결합니다.
- 제공된 필드를 사용하여, 드롭 다운 메뉴뿐만 아니라, 샘플링 레이트 및 NUM을 사용하여 마이크로 입력 시리얼 포트를 지정샘플의 BER 수집합니다. 이들 실험은 가속도 데이터의 에일리어싱을 방지하기 위해, 500 Hz의 샘플링 레이트가 표준이며, 1000 샘플은 일반적으로 기록되어 있습니다.
- 은 "Motor_and_Accelerometer.ino"코드를 사용하여 상기 진동 모터로 공급되는 PWM 펄스의 원하는 듀티 사이클을 지정 다시 "analogWrite"명령을 사용하여 모터를 제어하는 마이크로 컨트롤러 보드 프로그램을 다시 다운로드 (단계 1.1 참조 ). 예를 들어, 100 펄스의 개수를 설정하기 위해 코드를 판독한다 "analogWrite (vibe1,100)". 표 1 PWM 값과 해당 듀티 사이클.
- 은 "MotorCalibration.vi"인터페이스에서 고속 푸리에 변환 (FFT) 디스플레이를 사용하여, 최대 피크를 식별하고 (수평축)에서 해당 진동 주파수 값을 기록한다.
- 반복은 각각의 PWM 주파수 파이 녹화, 원하는 주파수에 도달 할 때까지 PWM 레벨을 조정하는 단계 1.7-1.8아르 자형. 100 Hz의 주파수를 대상으로하는 경우 최대 피크가 수평축에 100 Hz의 마크상에서 발생할 때까지 예를 들어, 1.7-1.8 단계를 수행.
주 :이 프로토콜에서 사용되는 진동 모터의 진동 타겟팅 더 5,10,13 문헌에 기재된 피부에 기계적 수용기의 응답 주파수와 일치하도록 60-400 Hz의 범위에 놓여 야. - 반복 수동으로 스프레드 시트 또는 연필과 종이 각 모터의 PWM 주파수 관계를 기록, 1.2.2 각각의 모터 1.8에 단계.
- 은 "Experiment_1.vi"파일을 엽니 다. 각 모터의 경우, 드롭 다운 주파수 메뉴를 마우스 오른쪽 버튼으로 클릭하고 "속성"을 선택합니다. "편집 항목"탭에서, 단계 1.8-1.9에서 결정된 원하는 주파수와 대응하는 PWM 수준을 입력 테이블을 사용합니다. 종료하려면 "OK"를 선택합니다.
- 시스템 설계 소프트웨어의 각 가상 인터페이스 (VI) 파일에 대한 단계를 반복 1.11가 테스트 중에 사용되는 (예를 들어, "Experiment_2.vi ","Experiment_3.vi "등).

가속도계는 자동차에 장착 된도 2는. 트라이 축 가속도계 (녹색) 교정을위한 모터의 평탄면과의 Z 축과 직교하는 코인 모터에 장착된다. 각각의 모터가 서로 다른 듀티 사이클을 사용하여 활성화하고, 대응하는 진동 주파수는 가속도 센서에 의해 기록되었다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
2. 모터를 배치
- 모든 모터가 (섹션 2) 교정되고 나면, 허벅지로 마운트합니다.
- 이 논문에서 설명 된 결과를 달성하기 위해, 대략 중간 될 전방, 후방, 내측 및 허벅지의 측면 각각에 하나의 모터를 배치큰 대 전자 및 측면 대퇴 외과 (이상 무릎 절단 장애인을위한 사지의 말단부를) 트위닝.
주 : 각 모터의 위치는 특정 관심 연구 문제 지역에 따라 달라질 수 있으며, 예를 들면 피부의 기계적 수용기의 유형 및 공간적 분포와 같은 해부학 적 생리 학적 요인에 의해 영향을받을 수있다.
- 이 논문에서 설명 된 결과를 달성하기 위해, 대략 중간 될 전방, 후방, 내측 및 허벅지의 측면 각각에 하나의 모터를 배치큰 대 전자 및 측면 대퇴 외과 (이상 무릎 절단 장애인을위한 사지의 말단부를) 트위닝.
- 양면 테이프를 사용하여 피부에 직접 부착 모터.
주 : 각 모터의 주위 영역을 면도하는 것은 필요하지 않지만 그 피부에의 밀착성 (도 3)을 향상시킬 수있다. 의류, 인공 라이너, 또는 사용자의 인식에 다른 물질의 영향이 관심있는 응용 프로그램의 경우, 오히려 피부에보다, 상기 재료의 상단에 모터를 배치합니다.

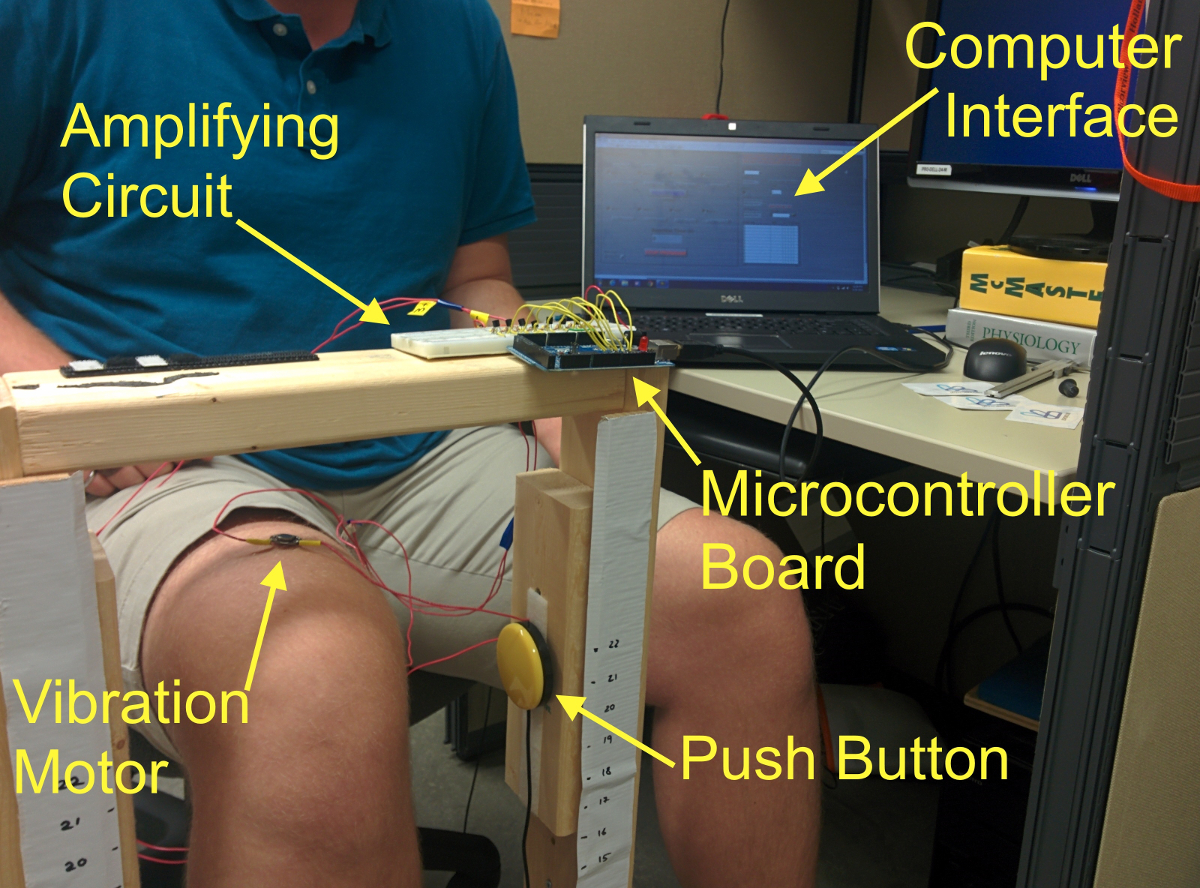
실험 그림 3. 테스트 플랫폼. 사용자 정의 테스트 플랫폼은 집 t에 지어진그는 보드 마이크로 컨트롤러 및 버튼을 누릅니다. 자동차는 (그림 참조) 피부에 직접 부착, 또는 모터와 피부 사이에 인공 라이너. 수있는 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
3. 실험 1 : 자극 및 녹음 반응 시간 적용
- 와 "Motor_and_Accelerometer_Test.ino"를 대체 컨트롤러의 동반 소프트웨어 패키지와 함께 "LVIFA_Base.pde"파일을 열 및 단계 1.1을 반복하여 데이터 수집 소프트웨어를 통해 보드의 제어를 가능하게하는 펌웨어와 마이크로 컨트롤러 보드, 플래시 재은 " LVIFA_Base.pde "스크립트.
- 직렬 - USB 커넥터를 이용하여 컴퓨터의 USB 포트에 직접 푸시 버튼을 연결한다. 필요한 모든 드라이버가 설치되어 있는지 확인합니다.
- 은 "Experiment_1.vi"인터페이스를 엽니 다.
- 시리얼을 지정합니다각각 "모터 입력"및 "녹색 단추"로 표시된 드롭 다운 메뉴에서 해당 직렬 포트 식별 번호를 선택하여 모터에 연결된 마이크로 컨트롤러 보드 포트 및 푸시 버튼. 컴퓨터의 운영 체제 장치 관리자 유틸리티를 사용하여 직렬 포트 식별 번호를 식별한다.
- 결과를 기록하고 프로그램을 시작하는 파일을 선택합니다.
- 선택 모터와 주파수는 "Experiment_1.vi"인터페이스의 각 모터의 드롭 다운 메뉴에서 선택하여 활성화합니다. 참가자 프레스에게 진동을 느낄 때 피드백이 적용되는 다리와 푸시 버튼이 있습니다. 버튼이 눌러 진 후, 클록 카운트를 중지했음을 주목하여 데이터 수집 소프트웨어 인터페이스의 응답을 확인하고, 드롭 다운 메뉴에서 주파수의 새로운 세트를 선택하여, 다음 시험을위한 모터를 리셋.
- 실험이 종결되면 DR을 사용opdown 메뉴 영점 모든 모터 주파수 돌아가 모터 제어 보드와의 연결을 종료하기 위해 "정지 프로그램"버튼을 선택한다.
4. 실험 2 : 자극을 구별
주 :이 실험은 단일 모터 또는 복수의 모터를 사용할 수있는 실험 (1)로부터 완전히 독립적으로 수행 될 수있다. 모터의 특정 위치는 응용 프로그램 및 연구 질문에 따라 달라질 수 있습니다.
- 직렬 USB 커넥터를 사용하여 다른 USB 포트에 두 번째 누름 단추를 연결합니다.
- 은 "Experiment_2.vi"데이터 수집 인터페이스를 엽니 다.
- 특정 연구 응용 프로그램에 필요한 위치 및 구성에 모터를 배치합니다. 예를 들어, 전방, 후방, 측면 각각에, 중간에 큰 대 전자 및 측면 대퇴 외과 (또는 절단 수술을위한 사지의 말단부) 사이, 허벅지에 하나의 모터를 배치하고, 허벅지의 안쪽 표면은 전자에레그 (10, 11)의이 부분들 각각의 주파수 감도 xamine.
- 마이크로 컨트롤러 보드 및 스텝 34과 동일한 방법을 사용하여 두 푸시 버튼의 시리얼 포트를 지정한다. 각 포트에 할당 된 푸시 버튼에 유의해야합니다.
- 활성화 될 특정 모터와 소프트웨어 인터페이스에서 "모터"아이콘을 클릭하여 원하는 주파수의 순서를 선택한다. 예를 들어, 세 개의 주파수가 테스트되고 가정 등 140 Hz에서 180 Hz에서, 220 Hz에서있다. 일련의 테스트는 140 Hz에서 다음 (1) 180 Hz에서 140 Hz로 하였다 (2) 220 ㎐, 220 Hz에서 다음 (3) 180 Hz에서 수 있습니다.
- 입력 지연 시간과 자극 기간을 시작합니다. 1.5 초 지연 자극 시간 모두를위한 전형이다.
- 프로그램을 시작합니다.
주의 : 단계 4.6에 규정 된 지연이 프로그램은 단계 45에서 선택된 한 쌍의 주파수의 순서로 모터 (들)를 활성화 애프터. 예를 들어, 180 Hz에서 220 Hz로 대 였다면 SE단계 4.5 택된, 해당 모터는 처음으로 220 Hz로 전환하기 전에 지정된 기간 동안 180 Hz에서 진동합니다. - 두 번째 인식 주파수가 처음보다 높거나 낮은 여부를 선택할 수있는 두 개의 푸시 버튼의 참가자를 눌러 하나가 있습니다. 반응은 자동 프로그램에 의해 기록 될 것이다.
결과
도 4는 하나의 모터의 180 Hz의 진동 주파수에 대한 PWM 값을 식별하는 보정 곡선을 도시한다. 기본 주파수 스파이크 180 Hz에서 발생할 때까지 50 %의 듀티 사이클에서 시작하여 PWM 값은 반복된다. 성공적인 교정 시험은 기본 진동 주파수에서 명확한 스파이크를 표시해야합니다. 또는 지지체 표면에 상기 모터의 모터 가속도계 불량 정착 명확한 스파이크없이 더 FFT 확산 될 수있다. 마운트...
토론
이 프로토콜의 목적은 진동 촉각 ASF 애플리케이션에서 자극 파라미터를 평가하기위한 프레임 워크를 제공하는 것이다. 구체적으로는, 사용자 응답에 대한 감각의 진동 주파수, 진폭, 위치 및 서열의 영향을 검사한다. 이 프레임 워크에 내장보다 임상 적으로, 이러한 접합 벤딩 또는 다른 한쪽 다리 중량 시프트 같을 수도 사용자 응답의 추가적인 또는 대안적인 형태를 포함하도록 확장 될 수있다....
공개
The authors have nothing to disclose.
감사의 말
This protocol was developed for research supported by the Natural Sciences and Engineering Research Council of Canada (grant RGPIN 401963).
자료
| Name | Company | Catalog Number | Comments |
| Vibrating Pager Motors | Precision Microdrives | Model 310-101 | Coin eccentric rotating mass motors. As many as necessary to test all locations and interactions of interest |
| Tri-axis Accelerometer | Dimension Engineering | ADXL 335 | Advanced analog accelerometer. 500 Hz bandwidth, 3.5-15 V input. Designed for motion, tilt, and slope measurement, as well as vibration and shock sensing. |
| Arduino Uno | Arduino | DEV-11021 | Microcontroller board for communicating with the tri-axis accelerometer |
| Arduion Mega 2560 | Arduino | DEV-11061 | Microcontroller board for interfacing with the vibration motors. |
| LabVIEW | National Instruments | Data acquisition software used to control motors and display accelerometer signals | |
| Arduino IDE Software | Arduino | v. 1.6.5 | |
| Push-Button | Bridges | Buddy Button | Wired switch featuring a 2.5 in/6.35 cm activation surface that provides an auditory click and tactile feedback. |
| Optional: | |||
| Dedicated haptic motor driver | Texas Instruments | DRV2605L | Can be used to replace the entire amplification circuit described in Step 1. |
| Flexible wearable goniometer | Biometrics Ltd. | SG110 | Twin axis flexible goniometers to measure angles in up to two planes of movement that can be used in lieu of the push button to measure joint movement in response to stimuli. www.biometricsltd.com/gonio.htm |
참고문헌
- Tate, J. J., Milner, C. E. Real-time kinematic, temporospatial, and kinetic biofeedback during gait retraining in patients: a systematic review. Phys. Ther. 90 (8), 1123-1134 (2010).
- Onate, J. A., Guskiewicz, K. M., Sullivan, R. J. Augmented feedback reduces jump landing forces. J. Orthop. Sports Phys. Ther. 31 (9), 511-517 (2001).
- Cholewiak, R. W. The perception of tactile distance: Influences of body site, space, and time. Perception. 28 (7), 851-875 (1999).
- Zhang, Z., Wu, H., Wang, W., Wang, B. A smartphone based respiratory biofeedback system. Proc. 2010 3rd Int. Conf. Biomed. Eng. Informatics. 2, 717-720 (2010).
- Wentink, E. C., Mulder, A., Rietman, J. S., Veltink, P. H. Vibrotactile stimulation of the upper leg: Effects of location, stimulation method and habituation. Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. , 1668-1671 (2011).
- Rusaw, D., Hagberg, K., Nolan, L., Ramstrand, N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss?. J. Rehabil. Res. Dev. 49 (8), 1239-1254 (2012).
- Goodworth, A. D., Wall, C., Peterka, R. J. Influence of feedback parameters on performance of a vibrotactile balance prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 17 (4), 397-408 (2009).
- Asseman, F., Bronstein, A. M., Gresty, M. A. Using vibrotactile feedback of instability to trigger a forward compensatory stepping response. J. Neurol. 254 (11), 1555-1561 (2007).
- Fan, R. E., Culjat, M. O., et al. A haptic feedback system for lower-limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 16 (3), 270-277 (2008).
- Sharma, A., Torres-moreno, R., Zabjek, K., Andrysek, J. Toward an artificial sensory feedback system for prosthetic mobility rehabilitation: Examination of sensorimotor responses. J. Rehabil. Res. Dev. 51 (6), 416-425 (2014).
- Sharma, A., Leineweber, M. J., Andrysek, J. The effects of cognitive load and prosthetic liner on volitional response times to vibrotactile feedback. J. Rehabil. Res. Dev. , (2016).
- Crea, S., Cipriani, C., Donati, M., Carrozza, M. C., Vitiello, N. Providing Time-Discrete Gait Information by Wearable Feedback Apparatus for Lower-Limb Amputees: Usability and Functional Validation. IEEE Trans. Neural Syst. Rehabil. Eng. 23 (2), 250-257 (2015).
- Bolanowski, S. J., Gescheider, G. A., Verrillo, R. T., Checkosky, C. M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 84 (5), 1680-1694 (1988).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. J. Neuroeng. Rehabil. 10 (1), 60 (2013).
- Shull, P. B., Jirattigalachote, W., Hunt, M. A., Cutkosky, M. R., Delp, S. L. Quantified self and human movement: A review on the clinical impact of wearable sensing and feedback for gait analysis and intervention. Gait Posture. 40 (1), 11-19 (2014).
- Goodworth, A. D., Peterka, R. J. Sensorimotor integration for multisegmental frontal plane balance control in humans. J. Neurophysiol. 107 (1), 12-28 (2012).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유