
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
שיטה להערכת עתוי דיוק של תגובות מוטוריות רצוניות כדי Vibrotactile גירויים
In This Article
Summary
מאמר זה מתאר טכניקה ליישום גירויי vibrotactile לירך של משתתף אדם, ומדידת זמן הדיוק ותגובה של התגובה הרצונית של המשתתף עבור שילובים שונים של מיקום גירוי ותדיר.
Abstract
Artificial sensory feedback (ASF) systems can be used to compensate for lost proprioception in individuals with lower-limb impairments. Effective design of these ASF systems requires an in-depth understanding of how the parameters of specific feedback mechanism affect user perception and reaction to stimuli. This article presents a method for applying vibrotactile stimuli to human participants and measuring their response. Rotating mass vibratory motors are placed at pre-defined locations on the participant's thigh, and controlled through custom hardware and software. The speed and accuracy of participants' volitional responses to vibrotactile stimuli are measured for researcher-specified combinations of motor placement and vibration frequency. While the protocol described here uses push-buttons to collect a simple binary response to the vibrotactile stimuli, the technique can be extended to other response mechanisms using inertial measurement units or pressure sensors to measure joint angle and weight bearing ratios, respectively. Similarly, the application of vibrotactile stimuli can be explored for body segments other than the thigh.
Introduction
משוב תחושתי מלאכותי (ASF) יכול להיות מוגדר כ נוהג לתת מידע ביולוגי בזמן אמת ליחידים, לעתים קרובות פיצוי עבור פרופריוספציה נפגעת או מנגנון חושי אחר. ASF כבר זמן רב בשימוש בתחום שיקום של פצועים או נכים לסייע בהשבת היבטים של תפקוד גופני ותנועה 1 - 3, המאפשר לאנשים לשלוט תהליכים פיזיקליים שפעם היו תגובה לא רצונית של מערכת העצבים האוטונומית 4. קטגוריית משנה של ASF, ביופידבק ביומכנית, משתמשת בחיישנים חיצוניים למדוד פרמטרים הנוגעים לאזן או הליכה קינמטיקה, ולהעביר מידע זה אל הפרט לבצע איזושהי גירוי מיושם. גישה פופולרית יותר ויותר למשוב ביומכנית מעסיקה מנועי רטט קטנים, או tactors, שהוצבו בחלקים שונים של הגוף כדי לספק המרחבית וכן משוב זמני. בספרות קודם שנעשה בתחום הראה promising תוצאות התומכים בשימוש של משוב vibrotactile ביישומים ליחידים עם קטיעות גפה נמוכה, ליקויי שיווי משקל, והזדקנות הקשורות אובדן שיווי המשקל 5 - 9.
הבנה מעמיקה של מנגנוני שליטת התפיסה של פרט בתגובה לגירויים ספציפיים יש צורך ליידע יישום אפקטיבי של מערכות ASF עבור יישומים שונים. למשוב vibrotactile, ובראשם מנגנונים אלה הם פרופריוספציה והתגובה הסנסורית, במיוחד את הרגישות למשתמש התנודות שיושמה את הזמן הדרוש כדי לבצע את התגובה הרצויה. כל מידע חושי מתקשר באמצעות גירויי רטט חייב להיות מקודד כמו שילובים מסוימים של תדירות רטט, משרעת, מיקום, ורצף. לכן, עיצוב מערכות vibrotactile ASF צריך לבחור שילובים של פרמטרים על מנת למקסם את התפיסה של המשתמש ואת הפרשנות של גירויים, כמוגם את העיתוי ואת הדיוק של התגובה המוטורית שהתקבלה. מטרת פרוטוקול זה היא לספק פלטפורמה שממנו ניתן להעריך זמני תגובה ודיוק בתגובה לגירויי רטט שונים ליידע את העיצוב של מערכות ASF לשימוש עם אוכלוסיות חושיות וכבד שונות.
השיטות שתוארו כאן בונה על מחקר קודם לחקור התפיסה האנושית של משוב משושי vibrotactile 3,5,6, ו פותחה לשימוש בשני מחקרים קודמים 10,11. שני המחקרים האחרונים מועסקים בפרוטוקול זה כדי לבחון את ההשפעות של תדירות רטט מיקום על הדיוק ואת העיתוי של תגובות המשתמש קטועי גפיים נמוכות גפה, מראה כי הפרמטרים הוא משפיעים באופן משמעותי על תוצאות מדידה, וכי רמה גבוהה של דיוק תגובה יכולה להיות הושג. תוצאות אלה יכולים לשמש כדי ליידע את המיקום האידיאלי של tactors במחקרים עתידיים ויישומים קליניים של מערכות ASF vibrotactile. העבודה אחרונה נוספת ידיEt Crea al. 12 בחן רגישות המשתמש לשינויים בדפוסי רטט להחיל הירך במהלך הליכה, באמצעות תגובות מילוליות כדי לסמן שינויים נתפסו דפוסי הרטט, ולא תגובה מוטורית. בעוד תגובות מילוליות ניתן להשתמש כדי למדוד דיוק זיהוי, הם לא מדברים על שגיאות ועיכובים שעלולות להיות נוכח בתהליך השליטה המוטורית.
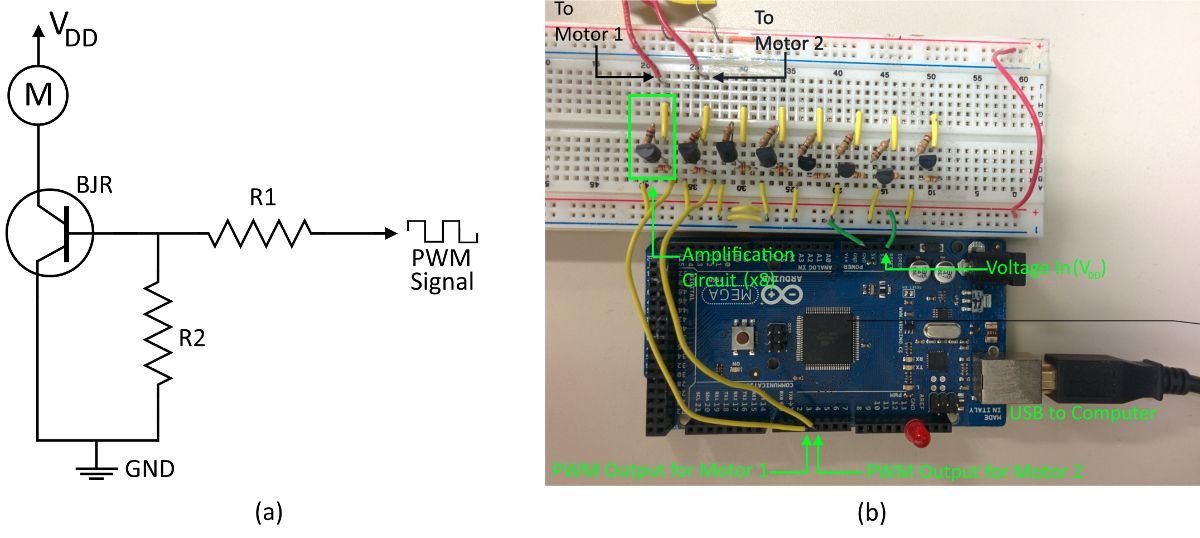
ההתקנה הראשונית עבור הניסויים הבאים מורכבת ממספר מנועי רוטטים המחוברים דופקות מווסת-רוחב סיכות פלט של לוח מייקרו. הלוח, בתורו, נשלט באמצעות חיבור Universal Serial Bus (USB) למחשב פועל תוכנת עיצוב מערכת זמינה מסחרי. המנועים דורשים מעגל הגברה נוסף כדי להבטיח מתח מספיק נוכחי מסופק על פני טווח רחב של תדרי רטט. מעגל מגבר למשל מוצג באיור 1. טרנזיסטור צומת דו-קוטבית (BJRבאיור) יכול להיות מוחלף עם טרנזיסטור אפקט השדה מוליך למחצה-תחמוצת-מתכת קטנה (MOSFET) עבור תפעול יעיל יותר וגודל קטן. באופן דומה, מעגל ההגברה כולו יכול להיות מוחלף על ידי נהג רכב לתחושה ה- off- המדף לספק שליטה נוספת וגודל מופחת. כל מנוע דורש מעגל משלו, באמצעות הציוד המפורטים במאמר זה, עד עשרה מנועים יכול להיות נשלט על ידי לוח מיקרו יחיד.

איור 1. מנוע חיווט. (א) מעגל ההגברה עבור מנוע רטט אחד מוצג. המנוע לכל דורש מעגל נפרד חייב להיות מחובר ליציאת פלט PWM ייחודי על מיקרו-בקר. ה- V DD כאן מייצג את הכח 3.3 V מסופק על ידי דירקטוריון מייקרו, ואת הנגד R2 משמש סרבן נפתח כדי להבטיח את מתג טרנזיסטור נשאר פתוח כאשר אפס מתח הוא אפליקציהשיקר. (ב) דוגמא של החיווט הפיזי של שני מנועים. למרות ששמונה מעגלי הגברה בודדים נראים לעין, רק שני מחוברי מנועי רטט. בפרוטוקול זה R1 = 4.7 קילו-אוהם ו R2 = 100 קילו-אוהם. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
Protocol
הפרוטוקול הבא אושר על ידי מועצת אתיקת מחקר הולנד Bloorview ילדי שיקום החולים.
1. כיול מנוע
- חבר את לוח מיקרו למחשב באמצעות יציאת USB.
- השימוש בתוכנת מייקרו המקורי, להעלות את התסריט המותאם אישית, "Motor_and_AccelerometerTest.ino" ללוח באמצעות חיבור USB על ידי לחיצה על הסמל "עלה", כונה על ידי החץ ימינה בעיגול.
- ודא שמפלס רטט מוגדר כאפס לשים את המנוע-למצב כבוי באמצעות הפקודה "analogWrite". הקוד צריך לקרוא "analogWrite (vibe1,0);".
- בקוד מייקרו, ציין את דופק הרוחב המווסת (PWM) סיכת פלט מתאים המנוע של עניין על ידי אתחול המשתנה "vibe1".
הערה: אותות PWM ליצור יציאות אנלוגיות המקורבות, אותות דיגיטליים שנוצרו על ידי מיקרו-בקר. הפינים הם labeleד מספרית על לוח מייקרו הפיזי. לדוגמא, אם המנוע מחובר פיני פלט PWM '3', אז להבטיח כי "int vibe1 = 3;" צוין בקוד.
- חברו את יציאת Z- ציר של תאוצה ציר תלת לאחד יציאות קלט אנלוגי של לוח מיקרו, ולחבר את חיובי הקרקע מוביל מן תאוצה ליציאות 5V וטחון (GND) של הלוח מיקרו, בהתאמה.
- הר התאוצה אל המנוע הרוטט, להבטיח כי ציר z שלה הוא מאונך על המשטח השטוח של המנוע, כפי שמוצגים באיור 2, ולמקם את המנוע על משטח קשה.
- פתח את קובץ "Motor_Calibration.vi" בתוכנת רכישת נתונים ולחבר את המיקרו-בקר למחשב דרך יציאת USB.
- שימוש בשדות המיועדים, ציין את יציאה טורית עבור כניסת מיקרו, באמצעות התפריט הנפתח, כמו גם את קצב הדגימה, ו numבער דגימות לאסוף. הערה: קצב הדגימה 500 הרץ הוא הסטנדרט לניסויים אלה כדי למנוע aliasing של נתוני האצה, ו -1,000 דגימות נרשמות בדרך כלל.
- שימוש בקוד "Motor_and_Accelerometer.ino", ציין את מחזור העבודה הרצויה של פולסים PWM שסופקו מנוע רטט, שוב באמצעות "analogWrite" הפקודה, ולאחר מחדש להוריד את התוכנית ללוח מיקרו שליטה על מנועים (ראה שלב 1.1 ). לדוגמה, כדי להגדיר את מספר פעימות ל -100, הקוד צריך לקרוא "analogWrite (vibe1,100);". טבלה 1 מפרטת את הערכים PWM מחזורים בתפקיד המקביל שלהם.
- שימוש פורייה- המהיר Transform (FFT) תצוגה על הממשק "MotorCalibration.vi", לזהות את השיא הגדול ולהקליט את הערך התדיר רטט המתאים (מן הציר האופקי).
- חזור על שלבים 1.7-1.8, התאמת רמות PWM עד אשר התדר הרצוי הוא הגיע, הקלטה כל פאי PWM בתדרr. לדוגמא, אם מיקוד בתדר 100 הרץ, לבצע צעדים 1.7-1.8 עד לשיא הגדול מתרחש על הקו ה -100 הרץ על הציר האופקי.
הערה: מנועי הרטט בשימוש בפרוטוקול זה, התנודות הממוקדות צריכות לשקר בטווח 60-400 הרץ כדי להתאים את תדרי התגובה טוב יותר של מכאניים בעור שתואר בספרות 5,10,13. - חזור על שלבי 1.2.2 ל -1.8 לכל מנוע, באופן ידני הקלטת יחסי PWM בתדר לכל מנוע עם גיליון אלקטרוני או עיפרון ונייר.
- פתח את הקובץ "Experiment_1.vi". לכל מנוע, לחץ לחיצה ימנית על התפריט הנפתח ובחר תדר "נכס". בכרטיסיית "הפריטים ערוכים", השתמש בטבלה להיכנס התדרים הרצויים ורמות PWM מקבילות שנקבעו שלבי 1.8-1.9. בחר "אישור" כדי לצאת.
- חזור על שלב 1.11 עבור כל ממשק וירטואלי (VI) הקובץ של תוכנת עיצוב מערכת לשמש במהלך הבדיקה (למשל, "Experiment_2.vi "," Experiment_3.vi ", וכו ').

איור 2. Accelerometer רכוב על מנוע. התאוצה תלת-הציר (הירוקה) הוא רכובה על מנוע המטבע עם מאונך Z- הציר אל פני השטח השטוחים של המנוע לכיול. מנוע כל הופעל באמצעות מחזורי הפעולה שונים, ואת תדרי הרטט המתאימים נרשמו על ידי התאוצה. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
2. הצבת מוטורס
- לאחר שכל המנועים כבר מכוילים (סעיף 2), הר אותם לירך.
- כדי להשיג את התוצאות מתוארות בכתב היד הזה, למקם את המנוע אחד על כל אחד הקדמי, האחורי, המדיאלי, והמשטחים הלטרלי של הירך, כ באמצע הדרך להיותtween את trochanter יותר condyle הירך לרוחב (או הקצה הדיסטלי של הגפה לקטועי גפיים מעל לברך).
הערה: מיקומים ספציפיים של כל מנוע יכול להשתנות, תלוי שאלות מחקר אזורים של עניין, והוא יכול להיות מושפע מגורמים אנטומיים ופיזיולוגיים, כגון חלוקת סוג והמרחבית של מכאניים בעור.
- כדי להשיג את התוצאות מתוארות בכתב היד הזה, למקם את המנוע אחד על כל אחד הקדמי, האחורי, המדיאלי, והמשטחים הלטרלי של הירך, כ באמצע הדרך להיותtween את trochanter יותר condyle הירך לרוחב (או הקצה הדיסטלי של הגפה לקטועי גפיים מעל לברך).
- צרף מנועים ישירות על העור באמצעות קלטת דו צדדית.
הערה: גילוח באזור סביב כל מנוע אינו הכרחי, אך הוא עשוי לשפר את ההידבקות שלהם על העור (איור 3). עבור יישומים בהם את ההשפעות של בגדים, אניה תותבת, או בחומר אחר על התפיסה המשתמשים הם בעלי עניין, למקם את המנועים על גבי חומר אמר, ולא כנגד העור.

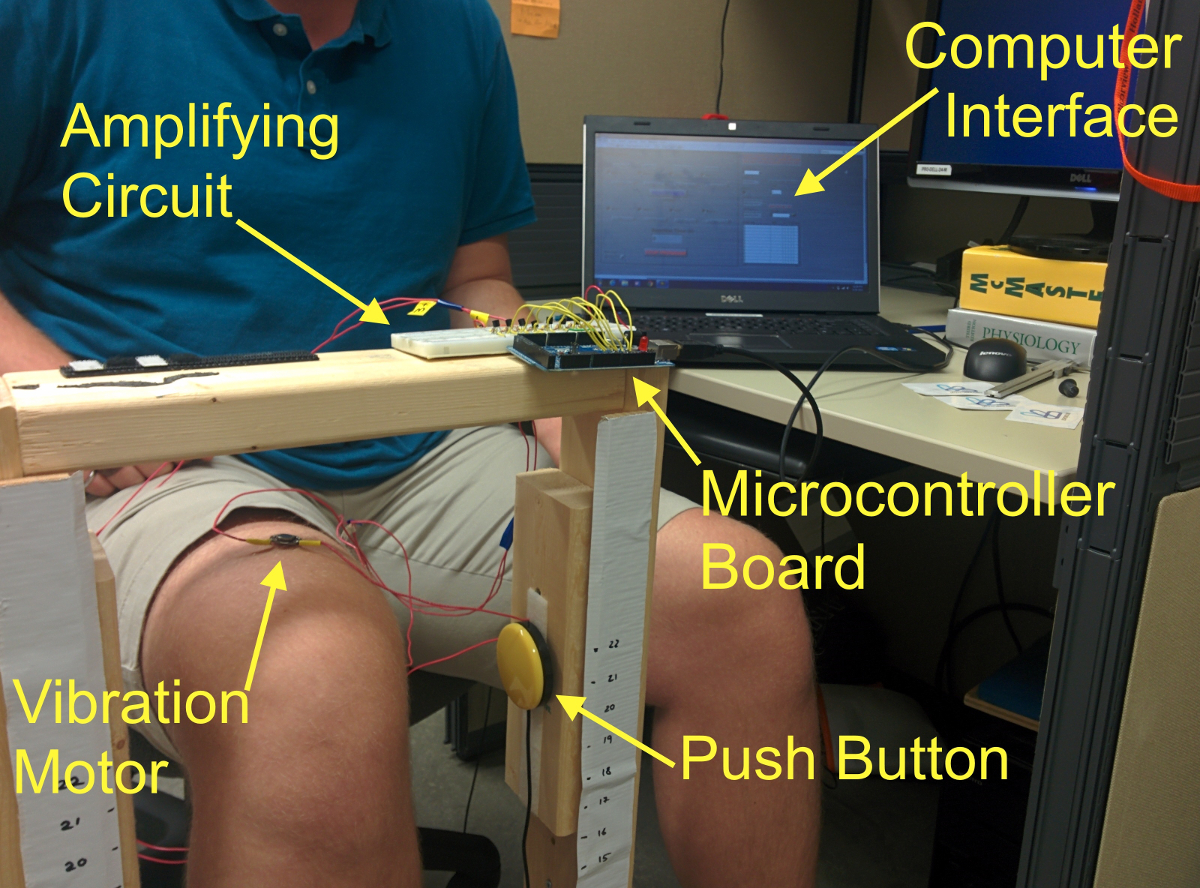
פלטפורמת בדיקת איור 3. לניסויים. מבחן מותאם אישית פלטפורמה נבנתה לבית tהוא מיקרו-בקרים לוחות לדחוף את הכפתורים. מוטורס יכול להיות מחובר ישירות על העור (כמוצג), או עם אניה תותבת בין המנוע לבין העור. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
3. ניסוי 1: מריחת תגובת גירויי זמן ההקלטה
- Re-פלאש לוח מייקרו עם הקושחה כדי לאפשר שליטה של הלוח באמצעות תוכנת רכישת נתונים על ידי פתיחת הקובץ "LVIFA_Base.pde" עם חבילת התוכנה המלווה של הבקר, וחזר שלב 1.1, החלפה "Motor_and_Accelerometer_Test.ino" עם " תסריט LVIFA_Base.pde ".
- חבר את בלחיצת כפתור ישירות לאחת מיציאות ה- USB במחשב באמצעות מחבר טורי-אל-USB. ודא שכל הדרייברים הדרושים מותקנים.
- פתח את ממשק "Experiment_1.vi".
- ציין את סדרתייציאות עבור הלוח מיקרו מחובר מנועים, בלחיצת כפתור על ידי בחירת מספרי זיהוי יציאה טורית המקביל מהתפריטים הנפתחים שכותרתו "קלט מנוע" ו "לחצן ירוק", בהתאמה. זהה את מספרי זיהוי יציאה טורית באמצעות שירות מנהל התקן מערכת הפעלה של המחשב.
- בחרו בקובץ לרשום את התוצאות ולהתחיל את התוכנית.
- בחר המנועים ותדרים להיות מופעל על ידי בחירה מתוך תפריטים נפתחים עבור כל מנוע בממשק "Experiment_1.vi". יש בעיתונות המשתתף בלחיצת כפתור עם הרגל שעליה משוב מוחל כאשר רטט מורגש. לאחר ילחץ על לחצן כלשהו, לאשר את התגובה בממשק תוכנת רכישת נתונים על ידי וציין כי השעון הפסיק לספור, ולאפס מנועים לניסוי הבא על ידי בחירת הסט החדש של תדרים מתוך התפריטים הנפתחים.
- לאחר הניסוי הוא סיכם, השתמש drתפריטי opdown להחזיר את כל תדרים המנועים למצב אפס ובוחרים את הכפתור "תכנית Stop" לנתק את החיבור ללוח השליטה המוטורית.
4. ניסוי 2: הבחנה בין גירויים
הערה: ניסוי זה יכול להתנהל בצורה נפרדת לחלוטין מניסוי 1. מנוע יחיד או מנועים מרובים יכול לשמש. המיקומים הספציפיים של המנועים יכולים להשתנות בהתאם לשאלות היישום ומחקר.
- חבר בלחיצת כפתור שני ליציאת USB אחרת באמצעות מחבר טור-USB.
- פתח את ממשק רכישת נתונים "Experiment_2.vi".
- מניח את המנועים במיקומים והתצורות הנדרשת להחלת המחקר הספציפית. לדוגמא, במקום מנועים יחידים על הירך, באמצע הדרך בין trochanter יותר condyle ירך לרוחב (או בקצה הדיסטלי של הגפה לקטועי גפיים), על כל אחד הקדמי, אחורי, לרוחב, ומשטחים המדיאלי של הירך לדוארxamine הרגישות התדירה בכל המנות הבאות של הרגל 10,11.
- ציין את יציאות טוריות עבור הלוח מיקרו ושניהם כפתורים שכיבות באותו אופן כמו שלב 3.4. הקפד לציין אשר בלחיצת כפתור מוקצה כל יציאה.
- בחר מנועים ספציפיים יופעל רצף הרצוי של תדרים על ידי לחיצה על הסמלים "מנוע" בממשק התוכנה. לדוגמא, יניח שלושה תדרים נבדקים, כגון 140 הרץ, 180 הרץ, 220 רץ. סדרת בדיקות יכול להיות (1) 180 Hz ואחריו 140 הרץ, (2) 220 Hz ואחריו 140 הרץ, ו- (3) 180 Hz ואחריו 220 הרץ.
- הזן את עיכוב שעת ההתחלה ואת משך גירוי. 1.5 שניות אופייניות הוא העיכוב פעמי גירוי.
- הפעל את התוכנית.
הערה: לאחר העיכוב שצוין בשלב 4.6, התכנית תפעיל את המנוע (ים) עם הרצף של תדרים לזווג נבחרו שלב 4.5. לדוגמה, אם 180 הרץ לעומת 220 הרץ היה selected בשלב 4.5, המנוע המקביל ירטוט ראשון ב 180 הרץ למשך התקופה המצוינת לפני המעבר ל -220 הרץ. - יש בעיתונות משתתף אחד לחצנים ושתיים לבחור אם התדירות נתפסה השנייה הייתה גבוהה או נמוכה יותר מהראשון. תגובות יתועדו באופן אוטומטי על ידי התוכנית.
תוצאות
תרשים 4 מתאר את עקומות כיול זיהוי ערך PWM עבור תדירות רטט 180 רץ של מנוע יחיד. החל מ ובתפוקה 50%, את הערכים PWM הם איטרטיבית עד ספייק תדירות העיקרית מתרחשת ב 180 הרץ. ניסויי כיול מוצלחים צריכים להראות ספייק ברור בתדר הרטט העיקרי. קיבעון ירוד של התאוצה אל המנוע, או של המ?...
Discussion
מטרת פרוטוקול זה היא לספק את המסגרת להערכת פרמטרי גירוי ביישומי ASF vibrotactile. באופן ספציפי, הוא בוחן את ההשפעות של תדירות הרטט, משרעת, מיקום, ורצף על התגובה הסנסורית המשתמש. ניתן לבנות מסגרת זו על והרחיבה לשלב סוגים נוספים או חלופיים תגובה של משתמש שעשויה להיות יותר רלוונ...
Disclosures
The authors have nothing to disclose.
Acknowledgements
This protocol was developed for research supported by the Natural Sciences and Engineering Research Council of Canada (grant RGPIN 401963).
Materials
| Name | Company | Catalog Number | Comments |
| Vibrating Pager Motors | Precision Microdrives | Model 310-101 | Coin eccentric rotating mass motors. As many as necessary to test all locations and interactions of interest |
| Tri-axis Accelerometer | Dimension Engineering | ADXL 335 | Advanced analog accelerometer. 500 Hz bandwidth, 3.5-15 V input. Designed for motion, tilt, and slope measurement, as well as vibration and shock sensing. |
| Arduino Uno | Arduino | DEV-11021 | Microcontroller board for communicating with the tri-axis accelerometer |
| Arduion Mega 2560 | Arduino | DEV-11061 | Microcontroller board for interfacing with the vibration motors. |
| LabVIEW | National Instruments | Data acquisition software used to control motors and display accelerometer signals | |
| Arduino IDE Software | Arduino | v. 1.6.5 | |
| Push-Button | Bridges | Buddy Button | Wired switch featuring a 2.5 in/6.35 cm activation surface that provides an auditory click and tactile feedback. |
| Optional: | |||
| Dedicated haptic motor driver | Texas Instruments | DRV2605L | Can be used to replace the entire amplification circuit described in Step 1. |
| Flexible wearable goniometer | Biometrics Ltd. | SG110 | Twin axis flexible goniometers to measure angles in up to two planes of movement that can be used in lieu of the push button to measure joint movement in response to stimuli. www.biometricsltd.com/gonio.htm |
References
- Tate, J. J., Milner, C. E. Real-time kinematic, temporospatial, and kinetic biofeedback during gait retraining in patients: a systematic review. Phys. Ther. 90 (8), 1123-1134 (2010).
- Onate, J. A., Guskiewicz, K. M., Sullivan, R. J. Augmented feedback reduces jump landing forces. J. Orthop. Sports Phys. Ther. 31 (9), 511-517 (2001).
- Cholewiak, R. W. The perception of tactile distance: Influences of body site, space, and time. Perception. 28 (7), 851-875 (1999).
- Zhang, Z., Wu, H., Wang, W., Wang, B. A smartphone based respiratory biofeedback system. Proc. 2010 3rd Int. Conf. Biomed. Eng. Informatics. 2, 717-720 (2010).
- Wentink, E. C., Mulder, A., Rietman, J. S., Veltink, P. H. Vibrotactile stimulation of the upper leg: Effects of location, stimulation method and habituation. Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. , 1668-1671 (2011).
- Rusaw, D., Hagberg, K., Nolan, L., Ramstrand, N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss?. J. Rehabil. Res. Dev. 49 (8), 1239-1254 (2012).
- Goodworth, A. D., Wall, C., Peterka, R. J. Influence of feedback parameters on performance of a vibrotactile balance prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 17 (4), 397-408 (2009).
- Asseman, F., Bronstein, A. M., Gresty, M. A. Using vibrotactile feedback of instability to trigger a forward compensatory stepping response. J. Neurol. 254 (11), 1555-1561 (2007).
- Fan, R. E., Culjat, M. O., et al. A haptic feedback system for lower-limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 16 (3), 270-277 (2008).
- Sharma, A., Torres-moreno, R., Zabjek, K., Andrysek, J. Toward an artificial sensory feedback system for prosthetic mobility rehabilitation: Examination of sensorimotor responses. J. Rehabil. Res. Dev. 51 (6), 416-425 (2014).
- Sharma, A., Leineweber, M. J., Andrysek, J. The effects of cognitive load and prosthetic liner on volitional response times to vibrotactile feedback. J. Rehabil. Res. Dev. , (2016).
- Crea, S., Cipriani, C., Donati, M., Carrozza, M. C., Vitiello, N. Providing Time-Discrete Gait Information by Wearable Feedback Apparatus for Lower-Limb Amputees: Usability and Functional Validation. IEEE Trans. Neural Syst. Rehabil. Eng. 23 (2), 250-257 (2015).
- Bolanowski, S. J., Gescheider, G. A., Verrillo, R. T., Checkosky, C. M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 84 (5), 1680-1694 (1988).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. J. Neuroeng. Rehabil. 10 (1), 60 (2013).
- Shull, P. B., Jirattigalachote, W., Hunt, M. A., Cutkosky, M. R., Delp, S. L. Quantified self and human movement: A review on the clinical impact of wearable sensing and feedback for gait analysis and intervention. Gait Posture. 40 (1), 11-19 (2014).
- Goodworth, A. D., Peterka, R. J. Sensorimotor integration for multisegmental frontal plane balance control in humans. J. Neurophysiol. 107 (1), 12-28 (2012).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved