
需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
一种意志的运动反应的及时性和准确性,以振动触觉刺激评价方法
摘要
本文介绍用于施加振动触觉刺激对人参与者的大腿,并测量参与者的用于刺激的位置和频率的不同组合意志响应的精度和反应时间的技术。
摘要
Artificial sensory feedback (ASF) systems can be used to compensate for lost proprioception in individuals with lower-limb impairments. Effective design of these ASF systems requires an in-depth understanding of how the parameters of specific feedback mechanism affect user perception and reaction to stimuli. This article presents a method for applying vibrotactile stimuli to human participants and measuring their response. Rotating mass vibratory motors are placed at pre-defined locations on the participant's thigh, and controlled through custom hardware and software. The speed and accuracy of participants' volitional responses to vibrotactile stimuli are measured for researcher-specified combinations of motor placement and vibration frequency. While the protocol described here uses push-buttons to collect a simple binary response to the vibrotactile stimuli, the technique can be extended to other response mechanisms using inertial measurement units or pressure sensors to measure joint angle and weight bearing ratios, respectively. Similarly, the application of vibrotactile stimuli can be explored for body segments other than the thigh.
引言
人工感觉反馈(ASF)可以被定义为提供实时生物信息对个人,往往补偿受损本体或其他感官机构的做法。 ASF已经受伤或残疾人康复领域长期被用来帮助身体机能和运动1方面恢复- 3,允许个人控制曾经是自主神经系统4的无意识反应的物理过程。 ASF,生物力学生物反馈的子类,用外部传感器来测量与平衡或步态运动学参数,并通过某种应用的刺激传达这一信息到个人。一种日益流行的方法的生物力学反馈采用小振动马达,或病理因素,放置在身体的不同部位,以提供空间以及时间上的反馈。以前的文献已经呈现promising结果支持的应用程序与下肢截肢,前庭障碍的人使用振动触觉反馈,和老化有关的平衡5的损失- 9。
控制一个人的感知和响应特定的刺激机制的深入理解是必要的通知有效实施针对不同的应用ASF系统。为振动触觉的反馈,这些机制之间主要是本体和感觉运动响应,特别是对施加振动用户的灵敏度和执行所需的反应所需的时间。通过振动刺激传达任何感觉信息必须被编码为振动频率的特定组合,幅度,位置和序列。因此,震动触觉ASF系统的设计应该选择的参数组合,以最大限度地刺激用户的感知和解释,如还有的及时性和所得到的马达响应的准确性。该协议的目的是提供一种从其中计算的响应时间和响应精度的各种振动刺激通知ASF系统设计为具有不同的感官受损人群使用的平台。
此处所描述的方法建立在以前的研究探索的触觉和震动触觉反馈3,5,6-人类感知,并用于沿两个以前的研究-10,11-用途被开发。后两种研究采用该协议来检查在下肢截肢的准确性和用户响应及时振动频率和位置的影响,显示出这两个参数显著影响结果的措施,而且有高度的响应精度的可实现。这些结果可以被用于通知病理因素的理想放置在今后的研究和振动触觉的ASF系统的临床应用。其他最近的工作由Crea 等人的12检查用户灵敏度行走期间施加到大腿中的振动模式的变化,使用口头响应来表示感知的改变振动模式,而不是电动机的响应。虽然这些口头响应可以被用于测量检测精度,他们不考虑错误和延迟可能存在在电动机控制过程。
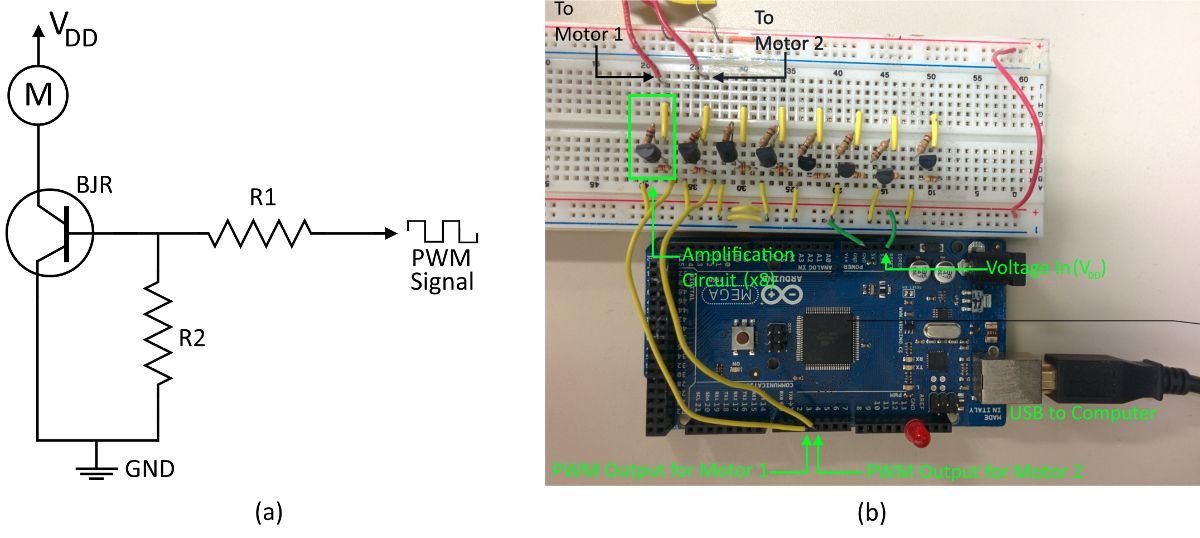
用于以下实验的主要设置包括许多个连接到脉冲宽度调制的微控制器板的输出管脚振动马达中的。该板,反过来,通过通用串行总线(USB)连接到一台计算机上运行市售系统设计软件控制。电机需要额外的放大电路,以确保足够的电压和电流在很宽范围的振动频率的供给。一个例子放大器电路示于图1。的双极型结型晶体管(BJR)在图中可以用小的金属氧化物半导体场效应晶体管(MOSFET)为更有效的操作和更小的尺寸来代替。类似地,整个放大电路可以由一个关闭的,现成的触觉电机驱动器被替换,以提供额外的控制和减小的尺寸。每个电机都需要自己的电路,和使用本文中列出的设备,最多十个马达可以由单个微板来控制。

图1.电机配线。(A)中的放大电路,用于单个振动电机被示出。各电动机需要一个单独的电路和必须连接到微控制器上的一个独特的PWM输出端口。与V DD这里表示由微控制器板提供的3.3伏电源,并且当零电压是应用R2用作下拉电阻,以确保该晶体管开关的电阻保持打开撒了谎。 (B)的两个电机的物理线路的一个例子。尽管示出了八个单独放大电路,只有两个被连接到振动电机。在这个协议中,R1 = 4.7kΩ和R2 = 100kΩ的。 请点击此处查看该图的放大版本。
{kind=link}
研究方案
下面的协议在荷兰Bloorview儿童康复医院是经研究伦理委员会。
1.电机校准
- 单片机电路板连接到使用USB端口的计算机。
- 使用原装单片机软件,上传自定义脚本,"Motor_and_AccelerometerTest.ino"使用通过点击"上传"图标,在盘旋右箭头表示USB连接的电路板。
- 确保该振动电平被设置为零,以把使用"analogWrite"命令,在关闭位置的马达。该代码应改为"analogWrite(vibe1,0);"。
- 在微控制器的代码,指定脉冲宽度调制(PWM)输出引脚相应于通过初始化"vibe1"可变兴趣电机。
注意:PWM信号生成从由微控制器产生的数字信号近似模拟输出。该引脚labeleÐ数字上的物理单片机电路板。例如,如果电机被连接到PWM输出引脚"3",则确保了"INT vibe1 = 3;"在代码被指定。
- 三轴加速计的z轴输出连接到微控制器板的模拟输入端口之一,以及连接正极和分别地从加速度计到5V和接地(GND)端口的微控制器板的引线。
- 安装加速度计到振动电机,确保其z轴是垂直于马达的平表面, 如图2中 ,并放置在电机上的硬表面。
- 打开在数据采集软件的"Motor_Calibration.vi"文件,并通过USB端口连接微控制器的计算机。
- 使用提供的字段中,指定用于微控制器输入串行端口,使用下拉菜单,以及采样率,和num样品的误码率,收集。注意:500赫兹的采样速率是标准为这些实验,以防止加速度数据的走样,和1000的样品通常记录。
- 使用"Motor_and_Accelerometer.ino"代码,指定供应到振动马达的PWM脉冲的所需占空比,再次使用"analogWrite"命令,并且该程序重新下载到微控制器板控制电机(参见步骤1.1 )。例如,要设置脉冲100的数目,代码应为"analogWrite(vibe1,100);"。 表1列出了在PWM值及其对应的占空比。
- 了"MotorCalibration.vi"接口上使用快速傅立叶变换(FFT)显示,查明的最大峰并记录对应的振动频率的值(从横轴)。
- 重复步骤1.7-1.8,调整PWM水平,直到达到所希望的频率,记录每个PWM频率PAI河例如,如果指定一个100赫兹的频率,执行步骤1.7-1.8直到发生在横轴上的100赫兹标记的最大峰。
注:有关本协议中使用的振动电机,振动的目标应在于在60-400赫兹范围在文献中描述5,10,13皮肤更好地匹配机械性的响应频率。 - 重复步骤每个电机1.2.2到1.8,手动记录与电子表格或铅笔和纸每个电机的PWM频率的关系。
- 打开"Experiment_1.vi"文件。对于每一个电机,下拉菜单频率右击并选择"属性"。在"编辑项目"选项卡中,使用表格,进入1.8-1.9的步骤来确定所需的频率和相应的PWM水平。选择"确定"退出。
- 为系统设计软件的每个虚拟接口(VI)的文件重复步骤1.11的测试过程中使用( 例如,"Experiment_2.vi","Experiment_3.vi" 等 )。

图2. 加速度安装到电机该三轴加速计(绿色)被安装到其z轴正交的马达用于校准的平坦表面的硬币电机。每个电机采用不同占空比激活,相应的振动频率是由加速度记录。 请点击此处查看该图的放大版本。
{kind=link}
2.放置汽车
- 一旦所有电机都被校准(第2节),将它们安装到大腿。
- 为了实现本手稿描述的结果,将一台电机上的每个前侧,后侧,内侧,和大腿的侧表面的,大约中途是吐温大粗隆和股骨外侧髁(或肢体的膝上截肢患者的远端)。
注意:每个电机的具体位置可以变化,这取决于所感兴趣的研究问题和地区,并且可以通过解剖和生理因素,如在皮肤机械性的类型和空间分布的影响。
- 为了实现本手稿描述的结果,将一台电机上的每个前侧,后侧,内侧,和大腿的侧表面的,大约中途是吐温大粗隆和股骨外侧髁(或肢体的膝上截肢患者的远端)。
- 直接连接马达用双面胶带在皮肤上。
注:刮围绕每个马达的区域是没有必要的,但可提高其对皮肤的粘附( 图3)。对于其中的衣物,假体衬套,或对用户感知一些其它材料的影响感兴趣的应用程序,将在所述材料的顶部的电机,而不是抵靠皮肤。

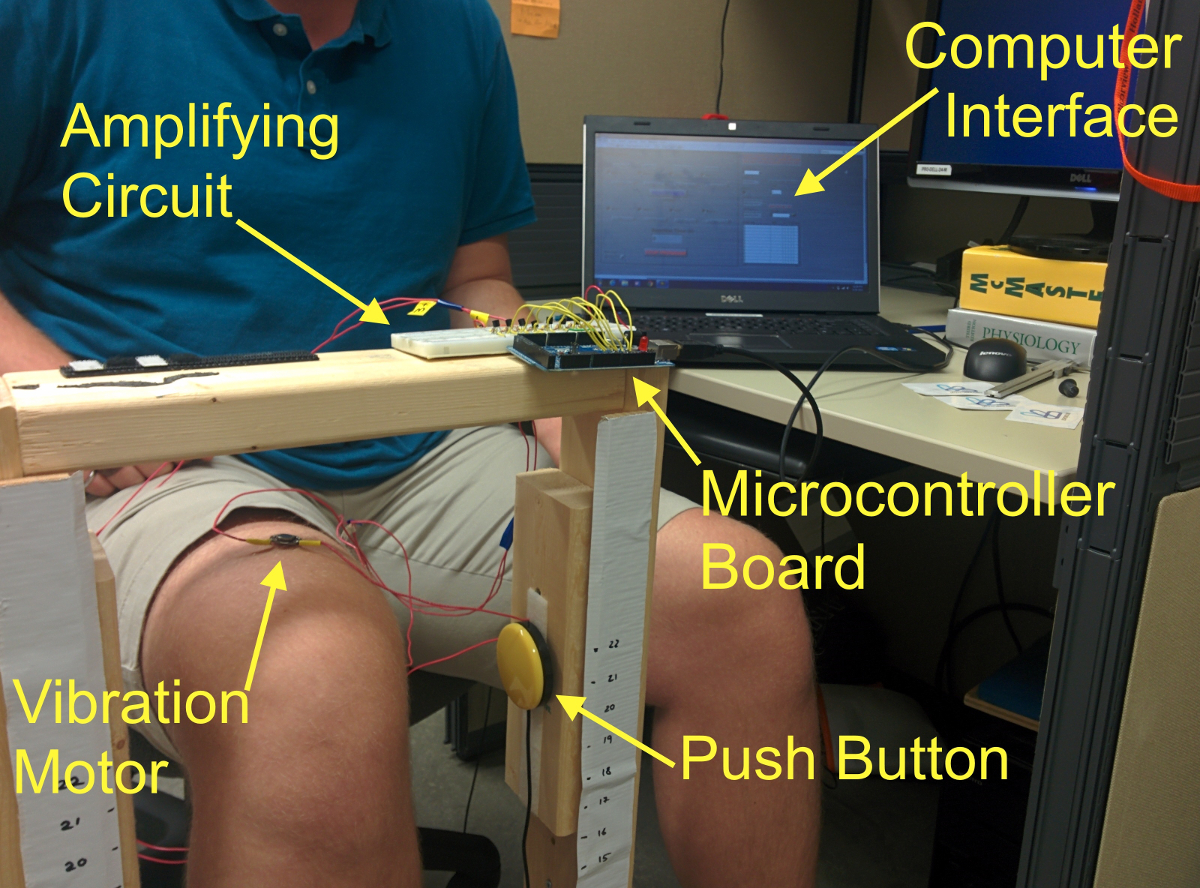
图3.测试平台的实验。自定义测试平台的建立是为了房子Ť他单片机电路板和按钮。汽车可以直接贴在皮肤上(如图所示),或与电机和皮肤之间的假体衬垫。 请点击此处查看该图的放大版本。
{kind=link}
3.实验1:应用刺激和记录反应时间
- 重新刷新微控制器板固件,以便通过与控制器的附带的软件包,打开"LVIFA_Base.pde"的文件,并重复步骤1.1数据采集软件董事会的控制权,取代"Motor_and_Accelerometer_Test.ino"与" LVIFA_Base.pde"脚本。
- 直接连接的按钮来使用串行到USB连接电脑的USB端口中的一个。确保所有需要的驱动程序。
- 打开"Experiment_1.vi"界面。
- 指定串行端口,用于单片机电路板连接到电机,和按钮从标有"电机输入"和"绿色按钮",分别下拉菜单选择相应的串行端口标识号。确定使用计算机的操作系统设备管理器实用程序的串行端口标识号。
- 选择该文件以记录结果并启动程序。
- 选择电机和频率通过从下拉菜单中的"Experiment_1.vi"接口每个马达选择被激活。有参与者按下按钮以在其上感觉到的振动时被施加反馈的腿。该按钮被按下后,确认通过注意到时钟已经停止计数在数据采集软件界面的响应,并通过从下拉菜单中选择一组新的频率重置为下一个试验的电机。
- 一旦实验结束后,使用DRopdown菜单,所有机动频率恢复到零位,然后选择"停止程序"按钮以终止于电机控制板上的连接。
4.实验2:刺激之间区分
注意:这个实验可以完全独立于实验1.单个或多台电机可以用来进行。马达的具体位置可以根据不同的应用和研究问题而有所不同。
- 使用串行USB接口第二按钮连接到另一个USB端口。
- 打开"Experiment_2.vi"的数据采集接口。
- 将电机在具体的研究应用程序所需的位置和配置。例如,将单个马达上大腿,大转子和股骨外侧髁(或肢体被截肢者的前端)之间的中间,在每个前,后,外侧的,和大腿内侧表面到电子xamine在每个腿10,11的这些部分的频率灵敏度。
- 指定用于微控制器板,并使用相同的方法步骤3.4既个按键的串行端口。一定要注意哪些按钮被分配到每一个端口。
- 选择要激活的特定的电机和通过点击在软件接口"电机"的图标的频率的所需序列。例如,假设三个频率正在测试,如140赫兹,180赫兹,220赫兹。一系列测试可能是(1)180赫兹后跟140赫兹,(2)220赫兹后跟140赫兹,及(3)180赫兹后跟220赫兹。
- 输入延迟开始时间和持续时间的刺激。 1.5秒是典型的两延迟和刺激次。
- 启动该程序。
注:后在步骤4.6中指定的延迟,程序将激活与步骤4.5选择成对频率的序列电机(多个)。例如,如果180赫兹与220赫兹是本身在步骤4.5 lected,相应的马达将首先在180赫兹的指定的持续时间切换到220赫兹之前振动。 - 有参与者按一项所述的两个按钮来选择第二感知频率是否比第更高或更低。响应将自动被程序记录下来。
结果
图4示出的校准曲线识别为单个马达的180赫兹的振动频率的PWM值。以50%的占空比开始时,PWM值被重复,直到主频率尖峰发生在180赫兹。成功校准,试验应显示在主振动频率明显的尖峰。加速度计到电机,或者电机的支撑表面的差固定,可能会导致不明确的尖峰更弥漫的FFT。在这种情况下,支架已经调整后,以确保更好的连接的校准试验应该重复。
图5A
讨论
该协议的目的是提供一种用于在振动触觉的ASF应用评估刺激参数提供框架。具体地讲,它检查振动的频率,振幅,位置和序列的用户感觉运动响应的影响。这个框架可以在建立和扩展,其中包含另外的或可选择的类型可能更临床相关,如弯曲的联合,或从一条腿移重量到另一个用户应答。这些类型的变化将需要稍微不同的硬件配置,即置换设备的按钮的如惯性测量单元(IMU产品)或压力传感器,?...
披露声明
The authors have nothing to disclose.
致谢
This protocol was developed for research supported by the Natural Sciences and Engineering Research Council of Canada (grant RGPIN 401963).
材料
| Name | Company | Catalog Number | Comments |
| Vibrating Pager Motors | Precision Microdrives | Model 310-101 | Coin eccentric rotating mass motors. As many as necessary to test all locations and interactions of interest |
| Tri-axis Accelerometer | Dimension Engineering | ADXL 335 | Advanced analog accelerometer. 500 Hz bandwidth, 3.5-15 V input. Designed for motion, tilt, and slope measurement, as well as vibration and shock sensing. |
| Arduino Uno | Arduino | DEV-11021 | Microcontroller board for communicating with the tri-axis accelerometer |
| Arduion Mega 2560 | Arduino | DEV-11061 | Microcontroller board for interfacing with the vibration motors. |
| LabVIEW | National Instruments | Data acquisition software used to control motors and display accelerometer signals | |
| Arduino IDE Software | Arduino | v. 1.6.5 | |
| Push-Button | Bridges | Buddy Button | Wired switch featuring a 2.5 in/6.35 cm activation surface that provides an auditory click and tactile feedback. |
| Optional: | |||
| Dedicated haptic motor driver | Texas Instruments | DRV2605L | Can be used to replace the entire amplification circuit described in Step 1. |
| Flexible wearable goniometer | Biometrics Ltd. | SG110 | Twin axis flexible goniometers to measure angles in up to two planes of movement that can be used in lieu of the push button to measure joint movement in response to stimuli. www.biometricsltd.com/gonio.htm |
参考文献
- Tate, J. J., Milner, C. E. Real-time kinematic, temporospatial, and kinetic biofeedback during gait retraining in patients: a systematic review. Phys. Ther. 90 (8), 1123-1134 (2010).
- Onate, J. A., Guskiewicz, K. M., Sullivan, R. J. Augmented feedback reduces jump landing forces. J. Orthop. Sports Phys. Ther. 31 (9), 511-517 (2001).
- Cholewiak, R. W. The perception of tactile distance: Influences of body site, space, and time. Perception. 28 (7), 851-875 (1999).
- Zhang, Z., Wu, H., Wang, W., Wang, B. A smartphone based respiratory biofeedback system. Proc. 2010 3rd Int. Conf. Biomed. Eng. Informatics. 2, 717-720 (2010).
- Wentink, E. C., Mulder, A., Rietman, J. S., Veltink, P. H. Vibrotactile stimulation of the upper leg: Effects of location, stimulation method and habituation. Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. , 1668-1671 (2011).
- Rusaw, D., Hagberg, K., Nolan, L., Ramstrand, N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss?. J. Rehabil. Res. Dev. 49 (8), 1239-1254 (2012).
- Goodworth, A. D., Wall, C., Peterka, R. J. Influence of feedback parameters on performance of a vibrotactile balance prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 17 (4), 397-408 (2009).
- Asseman, F., Bronstein, A. M., Gresty, M. A. Using vibrotactile feedback of instability to trigger a forward compensatory stepping response. J. Neurol. 254 (11), 1555-1561 (2007).
- Fan, R. E., Culjat, M. O., et al. A haptic feedback system for lower-limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 16 (3), 270-277 (2008).
- Sharma, A., Torres-moreno, R., Zabjek, K., Andrysek, J. Toward an artificial sensory feedback system for prosthetic mobility rehabilitation: Examination of sensorimotor responses. J. Rehabil. Res. Dev. 51 (6), 416-425 (2014).
- Sharma, A., Leineweber, M. J., Andrysek, J. The effects of cognitive load and prosthetic liner on volitional response times to vibrotactile feedback. J. Rehabil. Res. Dev. , (2016).
- Crea, S., Cipriani, C., Donati, M., Carrozza, M. C., Vitiello, N. Providing Time-Discrete Gait Information by Wearable Feedback Apparatus for Lower-Limb Amputees: Usability and Functional Validation. IEEE Trans. Neural Syst. Rehabil. Eng. 23 (2), 250-257 (2015).
- Bolanowski, S. J., Gescheider, G. A., Verrillo, R. T., Checkosky, C. M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 84 (5), 1680-1694 (1988).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. J. Neuroeng. Rehabil. 10 (1), 60 (2013).
- Shull, P. B., Jirattigalachote, W., Hunt, M. A., Cutkosky, M. R., Delp, S. L. Quantified self and human movement: A review on the clinical impact of wearable sensing and feedback for gait analysis and intervention. Gait Posture. 40 (1), 11-19 (2014).
- Goodworth, A. D., Peterka, R. J. Sensorimotor integration for multisegmental frontal plane balance control in humans. J. Neurophysiol. 107 (1), 12-28 (2012).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。