
Un abonnement à JoVE est nécessaire pour voir ce contenu. Connectez-vous ou commencez votre essai gratuit.
Method Article
Une méthode d'évaluation de rapidité et la précision des réponses Volitional moteur à vibrotactile Stimuli
Dans cet article
Résumé
Cet article décrit une technique pour appliquer des stimuli vibrotactile à la cuisse d'un participant humain, et on mesure la précision et le temps de réaction de la réponse volontaire du participant pour diverses combinaisons de lieu de stimulation et de la fréquence.
Résumé
Artificial sensory feedback (ASF) systems can be used to compensate for lost proprioception in individuals with lower-limb impairments. Effective design of these ASF systems requires an in-depth understanding of how the parameters of specific feedback mechanism affect user perception and reaction to stimuli. This article presents a method for applying vibrotactile stimuli to human participants and measuring their response. Rotating mass vibratory motors are placed at pre-defined locations on the participant's thigh, and controlled through custom hardware and software. The speed and accuracy of participants' volitional responses to vibrotactile stimuli are measured for researcher-specified combinations of motor placement and vibration frequency. While the protocol described here uses push-buttons to collect a simple binary response to the vibrotactile stimuli, the technique can be extended to other response mechanisms using inertial measurement units or pressure sensors to measure joint angle and weight bearing ratios, respectively. Similarly, the application of vibrotactile stimuli can be explored for body segments other than the thigh.
Introduction
rétroaction sensorielle artificielle (ASF) peut être définie comme la pratique de fournir en temps réel des informations biologiques à des individus, souvent compenser proprioception compromis ou un autre mécanisme sensoriel. ASF a été longtemps utilisé dans le domaine de la réadaptation des personnes blessées ou handicapées pour aider à la récupération des aspects de la fonction physique et de mouvement : 1 - 3, ce qui permet aux individus de contrôler les processus physiques qui étaient autrefois une réaction involontaire du système nerveux autonome 4. Une sous-catégorie de ASF, biofeedback biomécanique, utilise des capteurs externes pour mesurer les paramètres relatifs à l'équilibre ou la marche cinématique, et de communiquer ces informations à l'individu par une sorte de stimulus appliqué. Une approche de plus en plus populaire pour la rétroaction biomécanique emploie de petits moteurs vibrants, ou contacteurs, placés à différentes parties du corps pour fournir l'espace ainsi que la rétroaction temporelle. la littérature antérieure a montré promising résultats favorisant l'utilisation des évaluations vibrotactile dans des applications à des personnes ayant subi une amputation des membres inférieurs, troubles vestibulaires, et le vieillissement-connexe perte d'équilibre 5-9.
Une compréhension approfondie des mécanismes de contrôle de la perception et de la réponse d'un individu à des stimuli spécifiques est nécessaire pour informer la mise en œuvre efficace des systèmes d'ASF pour différentes applications. Pour la rétroaction vibrotactile, chef parmi ces mécanismes sont proprioception et la réponse sensorimotrice, en particulier l'utilisateur sensibilité aux vibrations appliquées et le temps requis pour exécuter la réaction souhaitée. Toute information sensorielle communiquée par des stimuli de vibration doit être codé comme des combinaisons spécifiques de fréquence de vibration, l'amplitude, l'emplacement et la séquence. Par conséquent, la conception de systèmes d'ASF vibrotactiles devrait choisir des combinaisons de paramètres afin de maximiser la perception et l'interprétation de l'utilisateur des stimuli, commeainsi que la rapidité et la précision de la réponse du moteur résultant. L'objectif de ce protocole est de fournir une plate-forme à partir de laquelle pour évaluer les temps de réponse et la précision de la réponse à divers stimuli vibratoires pour éclairer la conception des systèmes d'ASF pour une utilisation avec différentes populations sensorielles avec facultés affaiblies.
Les méthodes décrites ici construit sur la recherche avant d' explorer la perception humaine du tactile et vibrotactile rétroaction 3,5,6, et a été développé pour une utilisation dans deux études antérieures 10,11. Les deux dernières études utilisées ce protocole pour examiner les effets de la fréquence de vibration et l'emplacement sur la précision et la rapidité des réponses des utilisateurs dans amputés des membres inférieurs, montrant que les deux paramètres affectent de manière significative les mesures de résultats, et qu'un haut degré de précision de réponse peuvent être atteint. Ces résultats peuvent être utilisés pour informer le placement idéal des contacteurs dans les études futures et les applications cliniques des systèmes vibrotactile ASF. D'autres travaux récents parCréa et al. 12 a examiné la sensibilité des utilisateurs aux changements dans les modes de vibrations appliquées à la cuisse lors de la marche, en utilisant des réponses verbales pour signifier les changements perçus aux modes de vibration, plutôt que d' une réponse motrice. Bien que ces réponses verbales peuvent être utilisées pour mesurer la précision de détection, ils ne tiennent pas compte des erreurs et des retards qui peuvent être présents dans le processus de commande du moteur.
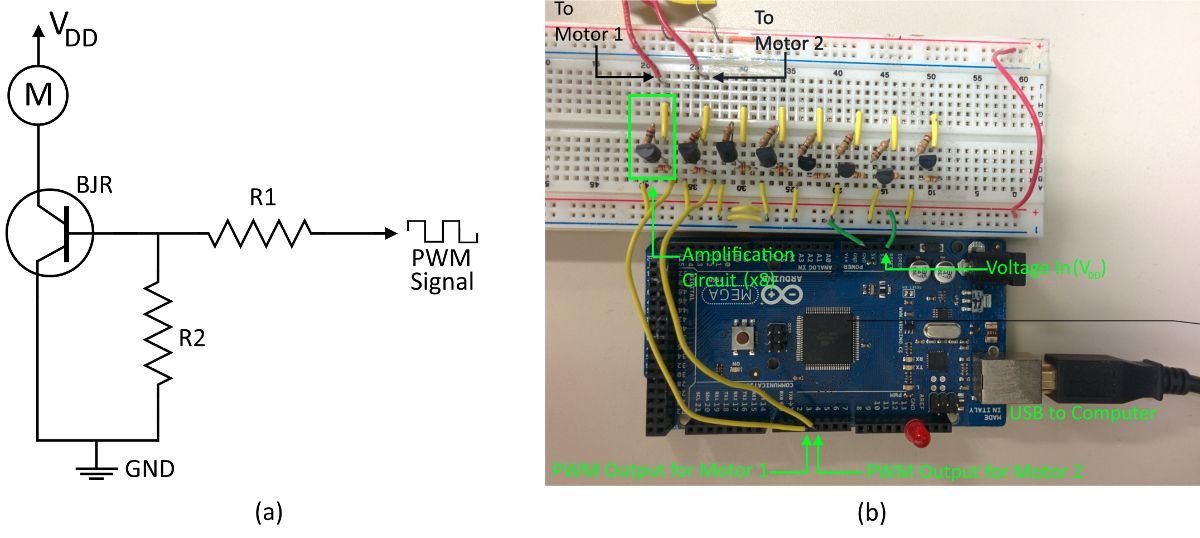
La configuration principale pour les expériences suivantes se compose d'un certain nombre de moteurs vibrants reliés à largeur d'impulsion modulée broches de sortie d'une carte de microcontrôleur. Le conseil d'administration est, à son tour, contrôlé par une connexion Universal Serial Bus (USB) à un ordinateur exécutant le logiciel disponible dans le commerce de la conception du système. Les moteurs ont besoin d'un circuit d'amplification supplémentaire pour assurer une tension suffisante, et le courant est fourni sur une large gamme de fréquences de vibration. Un circuit amplificateur est par exemple représenté sur la figure 1. Le transistor à jonction bipolaire (RJL) Dans la figure peut être remplacé par le transistor à effet de champ métal-oxyde inférieur-semiconducteur (MOSFET) pour un fonctionnement plus efficace et plus petite taille. De même, le circuit d'amplification entier peut être remplacé par un pilote de moteur haptique off-the-shelf pour fournir un contrôle supplémentaire et la taille réduite. Chaque moteur nécessite son propre circuit, et en utilisant l'équipement énuméré dans ce document, jusqu'à dix moteurs peut être contrôlé par une seule carte de microcontrôleur.

Figure 1. Le câblage du moteur. (A) Le circuit d'amplification pour un moteur de vibration unique est représenté. Chaque moteur exige un circuit séparé et il doit être connecté à un port de sortie PWM unique sur le microcontrôleur. Le V DD ici représente la puissance de 3,3 V fourni par le conseil de microcontrôleur, et la résistance R2 sert de resister pull-down pour assurer le commutateur à transistor reste ouvert lorsque la tension zéro est appmenti. (B) Un exemple de câblage physique des deux moteurs. Bien que huit circuits d'amplification individuels sont présentés, seuls deux sont reliés à des moteurs de vibration. Dans ce protocole R1 = 4,7 kQ et R2 = 100 kQ. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}
Access restricted. Please log in or start a trial to view this content.
Protocole
Le protocole suivant a été approuvé par le Comité d'éthique de la recherche à l'Hôpital de réadaptation pour enfants Holland Bloorview.
1. Calibration Motor
- Connectez la carte de microcontrôleur à l'ordinateur via un port USB.
- Utilisation du logiciel de microcontrôleur original, télécharger le script personnalisé, "Motor_and_AccelerometerTest.ino" à la carte en utilisant la connexion USB en cliquant sur l'icône «Télécharger», désigné par la flèche à droite encerclé.
- Assurez-vous que le niveau de vibration est mis à zéro pour mettre le moteur en position d'arrêt à l'aide de la commande "analogWrite". Le code doit se lire "analogWrite (vibe1,0);".
- Dans le code du microcontrôleur, spécifier la largeur d'impulsion modulée broche (PWM) de sortie correspondant au moteur d'intérêt en initialisant la variable «vibe1».
Remarque: les signaux PWM génèrent des sorties analogiques approximatives à partir des signaux numériques générés par le microcontrôleur. Les broches sont labeleD numérique sur la carte microcontrôleur physique. Par exemple, si le moteur est relié à la broche de sortie PWM '3', puis faire en sorte que le «int vibe1 = 3"; est spécifié dans le code.
- Connectez la sortie de l'axe z de l'accéléromètre tri-axe à l'un des ports d'entrée analogiques de la carte microcontrôleur, et relier le positif et le sol mène de l'accéléromètre pour le 5V et la masse (GND) ports de la carte de microcontrôleur, respectivement.
- Monter l'accéléromètre pour le moteur vibrant, en veillant à ce que son axe z est perpendiculaire à la surface plane du moteur, comme représenté sur la figure 2, et de placer le moteur sur une surface dure.
- Ouvrez le fichier "Motor_Calibration.vi" dans le logiciel d'acquisition de données et de connecter le microcontrôleur à l'ordinateur via un port USB.
- En utilisant les champs fournis, indiquez le port série pour l'entrée du microcontrôleur, en utilisant le menu déroulant, ainsi que le taux d'échantillonnage, et numbre d'échantillons à recueillir. Note: Le taux d'échantillonnage de 500 Hz est standard pour ces expériences afin d'éviter l'aliasing des données d'accélération et 1000 échantillons sont couramment enregistrées.
- En utilisant le code "Motor_and_Accelerometer.ino", précise le cycle de service souhaité des impulsions PWM fournies au moteur vibratoire, encore une fois en utilisant la commande "analogWrite", et re-télécharger le programme à la carte microcontrôleur commande des moteurs (voir l'étape 1.1 ). Par exemple, pour définir le nombre d'impulsions à 100, le code doit se lire "analogWrite (vibe1,100);". Le tableau 1 présente les valeurs de PWM et leurs cycles de travail correspondants.
- Utilisation de la transformée de Fourier rapide affichage (FFT) sur l'interface "MotorCalibration.vi", identifier le plus grand pic et enregistrer la valeur de la fréquence de vibration correspondante (à partir de l'axe horizontal).
- Répétez les étapes 1,7-1,8, en ajustant les niveaux de PWM jusqu'à ce que la fréquence désirée est atteinte, l'enregistrement chaque PWM fréquence pair. Par exemple, si le ciblage d'une fréquence de 100 Hz, effectuez les étapes 1,7-1,8 jusqu'à ce que le plus grand pic se produit sur la marque de 100 Hz sur l'axe horizontal.
Remarque: Pour les moteurs vibratoires utilisés dans ce protocole, les vibrations ciblées devraient se situer dans la gamme 60-400 Hz pour mieux faire correspondre les fréquences de réponse des mécanorécepteurs de la peau décrite dans la littérature 5,10,13. - Répétez les étapes 1.2.2 à 1.8 pour chaque moteur, l'enregistrement manuellement la relation PWM-fréquence pour chaque moteur avec un tableur ou un crayon et du papier.
- Ouvrez le fichier "Experiment_1.vi". Pour chaque moteur, un clic droit sur le menu de la fréquence de la liste déroulante et sélectionnez "Propriété". Sous l'onglet "Modifier Items", utiliser la table pour entrer les fréquences souhaitées et les niveaux de PWM correspondants déterminés dans les étapes 1,8-1,9. Sélectionnez "OK" pour quitter.
- Répétez l' étape 1.11 pour chaque fichier interface virtuelle (VI) du logiciel de conception de système pour être utilisé pendant l' essai (par exemple, "Experiment_2.vi "," Experiment_3.vi ", etc.).

Figure 2. Accéléromètre monté sur le moteur. L'accéléromètre tri-axe (vert) est monté sur le moteur de la pièce avec son axe z perpendiculaire à la surface plane du moteur pour le calibrage. Chaque moteur a été activé en utilisant différents cycles de service, et les fréquences de vibration correspondantes ont été enregistrées par l'accéléromètre. S'il vous plaît cliquez ici pour voir une version plus grande de cette figure.
{kind=link}
2. Mise en place des moteurs
- Une fois que tous les moteurs ont été calibrés (section 2), montez-les à la cuisse.
- Pour obtenir les résultats décrits dans le présent manuscrit, placer le moteur à une sur chacun des antérieure, postérieure, médiale et latérale de la cuisse, à peu près à mi-distance soitinterpoler le grand trochanter et le condyle latéral (ou l'extrémité distale du membre pour les amputés au-dessus du genou).
Remarque: Les emplacements spécifiques de chaque moteur peuvent varier, en fonction des questions de recherche et des régions d'intérêt, et peuvent être affectées par des facteurs anatomiques et physiologiques, tels que la distribution de type et spatiale des mécanorécepteurs de la peau.
- Pour obtenir les résultats décrits dans le présent manuscrit, placer le moteur à une sur chacun des antérieure, postérieure, médiale et latérale de la cuisse, à peu près à mi-distance soitinterpoler le grand trochanter et le condyle latéral (ou l'extrémité distale du membre pour les amputés au-dessus du genou).
- Fixer des moteurs directement sur la peau à l'aide de ruban adhésif double face.
Remarque: Le rasage de la région autour de chaque moteur est pas nécessaire, mais peut améliorer leur adhérence à la peau (Figure 3). Pour les applications où les effets d'habillement, une garniture de prothèse ou d'un autre matériau sur la perception de l'utilisateur d'intérêt, mettre les moteurs au-dessus dudit matériau, plutôt que sur la peau.

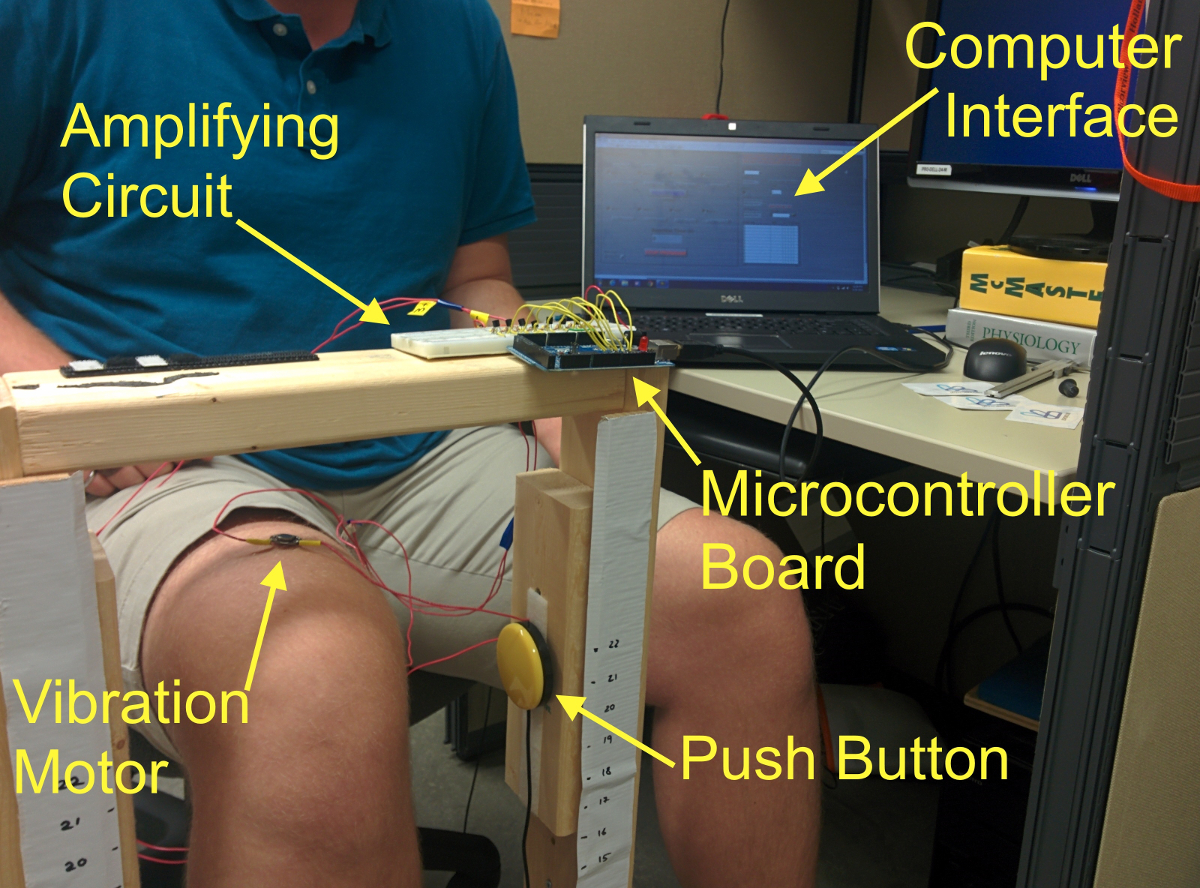
Figure 3. Plate - forme de test pour les expériences. Une plate - forme de test personnalisé a été construit pour la maison til de microcontrôleurs conseils et boutons-poussoirs. Les moteurs peuvent être fixés directement sur la peau (comme indiqué), ou avec une doublure prothétique entre le moteur et la peau. S'il vous plaît cliquer ici pour voir une version plus grande de cette figure.
{kind=link}
3. Expérience 1: Application Stimuli et enregistrement Temps de réaction
- Re-flash la carte microcontrôleur avec le firmware pour permettre le contrôle du conseil d'administration par le biais du logiciel d'acquisition de données en ouvrant le fichier "LVIFA_Base.pde" avec le package d'accompagnement du logiciel du contrôleur, et en répétant l'étape 1.1, en remplaçant "Motor_and_Accelerometer_Test.ino" avec le " LVIFA_Base.pde "script.
- Connecter le bouton-poussoir directement à l'un des ports USB de l'ordinateur à l'aide d'un connecteur série-USB. Assurez-vous que tous les pilotes nécessaires sont installés.
- Ouvrez l'interface "Experiment_1.vi".
- Spécifiez la sérieports pour la carte de microcontrôleur relié aux moteurs, et le bouton-poussoir en sélectionnant les numéros d'identification du port série correspondants à partir des menus déroulants étiquetés "Entrée du moteur» et «Green Button», respectivement. Identifier les numéros d'identification du port série à l'aide du système d'exploitation gestionnaire de périphériques de l'utilitaire de l'ordinateur.
- Sélectionnez le fichier pour enregistrer les résultats et lancer le programme.
- Sélectionnez les moteurs et les fréquences à activer en sélectionnant dans les menus déroulants pour chaque moteur dans l'interface "Experiment_1.vi". Avoir la presse des participants le bouton-poussoir avec la jambe sur laquelle la réaction est appliquée lorsqu'une vibration se fait sentir. Après que le bouton a été pressé, confirmer la réponse dans l'interface du logiciel d'acquisition de données en notant que l'horloge a cessé de compter, et réinitialiser les moteurs pour l'essai suivant en sélectionnant la nouvelle série de fréquences à partir des menus déroulants.
- Une fois que l'expérience est terminée, utilisez le drmenus opdown pour retourner toutes les fréquences du moteur à la position zéro et sélectionnez le bouton "Stop Program" de mettre fin à la connexion à la carte de commande du moteur.
4. Expérience 2: Distinguer entre Stimuli
Remarque: Cette expérience peut être réalisée tout à fait indépendamment l'un de l'expérience 1. Un seul moteur ou plusieurs moteurs peuvent être utilisés. Les emplacements spécifiques des moteurs peuvent varier en fonction de l'application et les questions de recherche.
- Connecter un second bouton-poussoir à un autre port USB à l'aide d'un connecteur série-USB.
- Ouvrez l'interface d'acquisition de données "Experiment_2.vi".
- Placez les moteurs dans les emplacements et les configurations requises pour l'application de recherche spécifique. Par exemple, placer les moteurs individuels sur la cuisse, à mi-distance entre le grand trochanter et le condyle latéral (ou à l'extrémité distale du membre pour les amputés), sur chacune des antérieure, postérieure, latérale et des surfaces interne de la cuisse à l'examine la sensibilité de fréquence à chacune de ces portions de la jambe 10,11.
- Spécifiez les ports série pour la carte microcontrôleur et les deux boutons-poussoirs en utilisant la même procédure que l'étape 3.4. Assurez-vous de noter que le bouton-poussoir est attribué à chaque port.
- Sélectionnez les moteurs spécifiques à activer et la séquence désirée de fréquences en cliquant sur les icônes «moteur» dans l'interface du logiciel. Par exemple, supposons que trois fréquences sont testés, tels que 140 Hz, 180 Hz et 220 Hz. Une série d'essais peut être (1), 180 Hz, 140 Hz suivie par (2), 220 Hz, 140 Hz suivie, et (3), 180 Hz, 220 Hz suivie.
- Entrez le retard début et la durée de la stimulation. 1,5 sec est typique tant pour le retard et les temps de stimulation.
- Démarrez le programme.
Remarque: Le après le retard spécifié à l'étape 4.6, le programme active le moteur (s) avec la séquence de fréquences appariées sélectionnées à l'étape 4.5. Par exemple, si 180 Hz par rapport à 220 Hz est en soitionné à l'étape 4.5, le moteur correspondant d'abord vibrer à 180 Hz pour la durée spécifiée avant de passer à 220 Hz. - Avoir le participant appuyez sur une des deux boutons-poussoirs pour choisir si la deuxième fréquence perçue est supérieure ou inférieure à la première. Les réponses seront automatiquement enregistrées par le programme.
Access restricted. Please log in or start a trial to view this content.
Résultats
La figure 4 illustre les courbes d'étalonnage identifiant la valeur PWM de 180 Hz , la fréquence de vibration d'un seul moteur. A partir d'un cycle de service de 50%, les valeurs PWM sont itérées jusqu'à ce que le pic de fréquence primaire se produit à 180 Hz. essais d'étalonnage retenus devraient montrer un pic clair à la fréquence de vibration primaire. Une mauvaise fixation de l'accéléromètre pour le moteur, ou du moteur à une surface d'appui peut se traduire...
Access restricted. Please log in or start a trial to view this content.
Discussion
Le but de ce protocole est de fournir le cadre pour l'évaluation des paramètres de stimulation dans les applications ASF vibrotactiles. Plus précisément, il examine les effets de la fréquence de vibration, de l'amplitude, l'emplacement et la séquence sur la réponse utilisateur sensorimotrice. Ce cadre peut être construit sur et élargi pour inclure les types de réponse de l'utilisateur qui peut être plus cliniquement pertinentes, telles que le pliage d'une articulation ou en transférant le...
Access restricted. Please log in or start a trial to view this content.
Déclarations de divulgation
The authors have nothing to disclose.
Remerciements
This protocol was developed for research supported by the Natural Sciences and Engineering Research Council of Canada (grant RGPIN 401963).
Access restricted. Please log in or start a trial to view this content.
matériels
| Name | Company | Catalog Number | Comments |
| Vibrating Pager Motors | Precision Microdrives | Model 310-101 | Coin eccentric rotating mass motors. As many as necessary to test all locations and interactions of interest |
| Tri-axis Accelerometer | Dimension Engineering | ADXL 335 | Advanced analog accelerometer. 500 Hz bandwidth, 3.5-15 V input. Designed for motion, tilt, and slope measurement, as well as vibration and shock sensing. |
| Arduino Uno | Arduino | DEV-11021 | Microcontroller board for communicating with the tri-axis accelerometer |
| Arduion Mega 2560 | Arduino | DEV-11061 | Microcontroller board for interfacing with the vibration motors. |
| LabVIEW | National Instruments | Data acquisition software used to control motors and display accelerometer signals | |
| Arduino IDE Software | Arduino | v. 1.6.5 | |
| Push-Button | Bridges | Buddy Button | Wired switch featuring a 2.5 in/6.35 cm activation surface that provides an auditory click and tactile feedback. |
| Optional: | |||
| Dedicated haptic motor driver | Texas Instruments | DRV2605L | Can be used to replace the entire amplification circuit described in Step 1. |
| Flexible wearable goniometer | Biometrics Ltd. | SG110 | Twin axis flexible goniometers to measure angles in up to two planes of movement that can be used in lieu of the push button to measure joint movement in response to stimuli. www.biometricsltd.com/gonio.htm |
Références
- Tate, J. J., Milner, C. E. Real-time kinematic, temporospatial, and kinetic biofeedback during gait retraining in patients: a systematic review. Phys. Ther. 90 (8), 1123-1134 (2010).
- Onate, J. A., Guskiewicz, K. M., Sullivan, R. J. Augmented feedback reduces jump landing forces. J. Orthop. Sports Phys. Ther. 31 (9), 511-517 (2001).
- Cholewiak, R. W. The perception of tactile distance: Influences of body site, space, and time. Perception. 28 (7), 851-875 (1999).
- Zhang, Z., Wu, H., Wang, W., Wang, B. A smartphone based respiratory biofeedback system. Proc. 2010 3rd Int. Conf. Biomed. Eng. Informatics. 2, 717-720 (2010).
- Wentink, E. C., Mulder, A., Rietman, J. S., Veltink, P. H. Vibrotactile stimulation of the upper leg: Effects of location, stimulation method and habituation. Proc. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. , 1668-1671 (2011).
- Rusaw, D., Hagberg, K., Nolan, L., Ramstrand, N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss? J. Rehabil. Res. Dev. 49 (8), 1239-1254 (2012).
- Goodworth, A. D., Wall, C., Peterka, R. J. Influence of feedback parameters on performance of a vibrotactile balance prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 17 (4), 397-408 (2009).
- Asseman, F., Bronstein, A. M., Gresty, M. A. Using vibrotactile feedback of instability to trigger a forward compensatory stepping response. J. Neurol. 254 (11), 1555-1561 (2007).
- Fan, R. E., Culjat, M. O., et al. A haptic feedback system for lower-limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 16 (3), 270-277 (2008).
- Sharma, A., Torres-moreno, R., Zabjek, K., Andrysek, J. Toward an artificial sensory feedback system for prosthetic mobility rehabilitation: Examination of sensorimotor responses. J. Rehabil. Res. Dev. 51 (6), 416-425 (2014).
- Sharma, A., Leineweber, M. J., Andrysek, J. The effects of cognitive load and prosthetic liner on volitional response times to vibrotactile feedback. J. Rehabil. Res. Dev. , (2016).
- Crea, S., Cipriani, C., Donati, M., Carrozza, M. C., Vitiello, N. Providing Time-Discrete Gait Information by Wearable Feedback Apparatus for Lower-Limb Amputees: Usability and Functional Validation. IEEE Trans. Neural Syst. Rehabil. Eng. 23 (2), 250-257 (2015).
- Bolanowski, S. J., Gescheider, G. A., Verrillo, R. T., Checkosky, C. M. Four channels mediate the mechanical aspects of touch. J. Acoust. Soc. Am. 84 (5), 1680-1694 (1988).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. J. Neuroeng. Rehabil. 10 (1), 60(2013).
- Shull, P. B., Jirattigalachote, W., Hunt, M. A., Cutkosky, M. R., Delp, S. L. Quantified self and human movement: A review on the clinical impact of wearable sensing and feedback for gait analysis and intervention. Gait Posture. 40 (1), 11-19 (2014).
- Goodworth, A. D., Peterka, R. J. Sensorimotor integration for multisegmental frontal plane balance control in humans. J. Neurophysiol. 107 (1), 12-28 (2012).
Access restricted. Please log in or start a trial to view this content.
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.