
Method Article
Seguimiento de piernas totalmente automatizado en insectos en movimiento libre mediante la segmentación y el seguimiento de las piernas de aprendizaje de funciones (FLLIT)
En este artículo
Resumen
Describimos protocolos detallados para el uso de FLLIT, un método de aprendizaje automático totalmente automatizado para el seguimiento del movimiento de las garras de las piernas en el movimiento libre de Drosophila melanogaster y otros insectos. Estos protocolos se pueden utilizar para medir cuantitativamente los movimientos sutiles de la marcha caminando en moscas de tipo salvaje, moscas mutantes y modelos de mosca de neurodegeneración.
Resumen
El modelo Drosophila ha sido invaluable para el estudio de la función neurológica y para la comprensión de los mecanismos moleculares y celulares que subyacen a la neurodegeneración. Mientras que las técnicas de mosca para la manipulación y el estudio de subconjuntos neuronales se han vuelto cada vez más sofisticadas, la riqueza de los fenotipos conductuales resultantes no ha sido capturada con un detalle similar. Para poder estudiar los movimientos sutiles de las piernas volantes para la comparación entre mutantes se requiere la capacidad de medir y cuantificar automáticamente los movimientos rápidos y de alta velocidad de las piernas. Por lo tanto, desarrollamos un algoritmo de aprendizaje automático para el seguimiento automatizado de garras de piernas en moscas que caminan libremente, segmentación y seguimiento de extremidades basada en el aprendizaje de características (FLLIT). A diferencia de la mayoría de los métodos de aprendizaje profundo, FLLIT está totalmente automatizado y genera sus propios conjuntos de entrenamiento sin necesidad de anotación de usuario, utilizando parámetros morfológicos integrados en el algoritmo de aprendizaje. En este artículo se describe un protocolo en profundidad para llevar a cabo el análisis de la marcha utilizando FLLIT. Detalla los procedimientos para la configuración de la cámara, la construcción de la arena, la grabación de vídeo, la segmentación de las piernas y el seguimiento de las garras de las piernas. También ofrece una visión general de los datos producidos por FLLIT, que incluye posiciones de cuerpo y pierna con seguimiento sin procesar en cada fotograma de vídeo, 20 parámetros de marcha, 5 gráficas y un vídeo rastreado. Para demostrar el uso de FLLIT, cuantificamos los parámetros de marcha enfermos relevantes en un modelo de mosca de ataxia espinocerebelosa 3.
Introducción
En las últimas décadas, las enfermedades neurodegenerativas y los trastornos del movimiento han crecido más en nuestras poblaciones envejecidas. Aunque nuestra comprensión de muchas enfermedades neurodegenerativas ha avanzado a nivel molecular y celular, las características fundamentales de los circuitos neuronales afectados que subyacen a la enfermedad siguen siendo poco comprendidas. Las herramientas de seguimiento conductualdesarrolladasrecientemente 1,2,3,4 ahora nos permiten estudiar anomalías del movimiento en modelos de enfermedades animales con el fin de identificar la desregulación molecular, celular y de circuito que existe enfermedad subyacente.
Las vías moleculares implicadas en muchas enfermedades neurodegenerativas se conservan en la mosca de la fruta Drosophila melanogaster,y los modelos de enfermedad de Drosophila han ayudado a dilucidar los mecanismos fundamentales subyacentes a la neurodegeneración5,,6. Recientemente demostramos que los modelos de mosca de la enfermedad de Parkinson (PD) y la ataxia espinocerebelosa 3 (SCA3) exhiben firmas de marcha distintas y conservadas que se asemejan a las de las respectivas enfermedades humanas1,lo que demuestra que el modelo de mosca se puede utilizar para entender los mecanismos de circuito subyacentes a la disfunción del movimiento en trastornos específicos del movimiento. El rico y en continuo crecimiento arsenal de herramientas en el modelo de mosca para la manipulación dirigida y visualización de neuronas en el único gen y nivel de una sola célula7,,8,9,10 hace de la mosca un modelo ideal uno para sondear la relación entre las vías de la enfermedad, los circuitos neuronales y la manifestación fenotípica conductual in vivo. Para permitir un análisis preciso y automatizado de la marcha de los insectos, recientemente desarrollamos un método de aprendizaje automático, la segmentación LImb basada en ganancias Feature Ly el trasiego T(FLLIT)1.
FLLIT consiste en un algoritmo de varias etapas totalmente automatizado que primero segmenta los píxeles de las patas, que posteriormente se utilizan para localizar y rastrear las garras de las patas correspondientes. FLLIT emplea un algoritmo de impulso para la segmentación, en contraste con los algoritmos de aprendizaje profundo utilizados en el trabajo reciente2,,3. Hay algunas similitudes con las redes neuronales convolucionales en que para ambos marcos, la extracción de características se realiza automáticamente a través del aprendizaje de kernels convolucionales. El primer paso en FLLIT consiste en el uso de operaciones morfológicas (borde y esqueletización) para generar automáticamente muestras de entrenamiento positivas (píxeles en las piernas) y negativas (fondo o píxeles en el cuerpo de la mosca) con alta confianza. Por lo tanto, FLLIT está totalmente automatizado y no requiere muestras de entrenamiento anotadas por el usuario. Usando las muestras de entrenamiento anteriores, un clasificador se entrena en el marco de un algoritmo de impulso. Un conjunto de clasificadores débiles se aprende iterativamente, con cada uno de los que consiste en un conjunto de kernels convolucionales para la extracción de entidades y un árbol de decisión. El clasificador final aprendido se utiliza entonces para la segmentación de las piernas y es capaz de discernir mejor las regiones difíciles / muestras duras mejor que las operaciones morfológicas, produciendo una segmentación general mucho más precisa para el seguimiento1. Desde las patas segmentadas, localizamos las puntas y las rastreamos usando el algoritmo húngaro: haciendo coincidir las puntas entre los fotogramas de forma que se minimice la suma de la distancia movida por cada punta. FLLIT puede manejar los casos de oclusión recordando la última ubicación vista (en coordenadas centradas en la mosca) para que una punta de pierna se recupere una vez que ya no está bajo oclusión.
Anteriormente mostramos que FLLIT puede rastrear de forma automática y precisa los movimientos de las piernas y analizar la marcha en una mosca o araña sin marcar, moviéndose libremente desde el vídeo de alta velocidad1; Por lo tanto, FLLIT debe ser ampliamente aplicable para el seguimiento de las piernas de artrópodos. Mediante la extracción de conjuntos de entrenamiento de aprendizaje automático utilizando parámetros morfológicos, FLLIT se entrena automáticamente para segmentar y rastrear las patas de los insectos sin la necesidad de anotación manual laboriosa, que es necesaria para la mayoría de los métodos de aprendizaje profundo. Por lo tanto, FLLIT está totalmente automatizado. Después de la segmentación y el seguimiento de las piernas, FLLIT produce automáticamente posiciones de cuerpo y pierna con seguimiento en cada fotograma de vídeo, 20 parámetros de marcha, 5 gráficas y un vídeo rastreado para el análisis de la marcha y la visualización de los movimientos de la marcha. Este protocolo proporciona una guía paso a paso para usar FLLIT.
Protocolo
1. Configuración del sistema
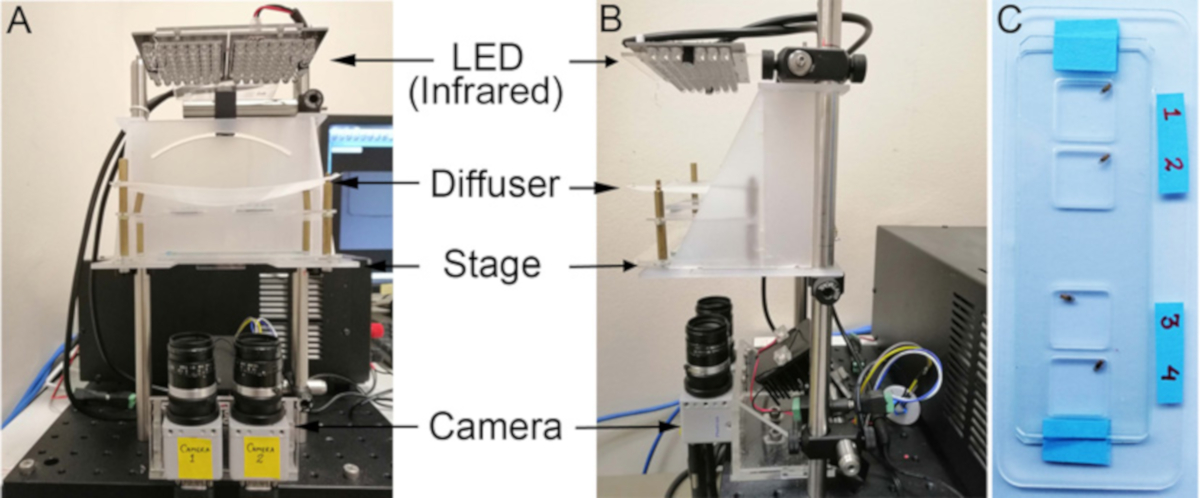
- Asegúrese de que la estación de grabación tiene una cámara de alta velocidad y un escenario sobre ella para sostener la cámara de arena(Figura 1). Ajuste la cámara para grabar a un mínimo de 250 fotogramas por segundo (fps), con una velocidad de obturación rápida en consecuencia (en este caso, la grabación se realiza a 1000 fps con una velocidad de obturación de 1 ms).
NOTA: Compruebe que el vídeo es adecuado para el seguimiento asegurándose de que haya un desenfoque de movimiento mínimo o ningún desenfoque de movimiento de las piernas en movimiento en todos los fotogramas. Si la pierna en movimiento está tan borrosa que un anotador humano no puede rastrearla, entonces la velocidad de grabación de la cámara y /o la velocidad de obturación deben aumentar. - Coloque las luces LED infrarrojas en la parte superior del escenario con un difusor (hoja translúcida) entre la cámara y la muestra(Figura 1A,B).
- Haga la cámara de grabación cortando una lámina de acrílico de 1,6 mm de espesor. En este experimento, utilice un campo de visión de 11 mm x 11 mm. Coloque la cámara entre dos diapositivas de vidrio(Figura 1C).
2. Preparación de moscas para la grabación
- Transfiera las moscas para ser grabadas en un nuevo vial de alimentos 24 h antes de la grabación.
NOTA: No utilice CO2 (normalmente utilizado para anestesiar las moscas en la primera colección) en las moscas menos de 24 h antes de la grabación. - Alrededor de 40 minutos antes de la grabación, transferir las moscas en viales vacíos y mantener en hielo durante 5-7 min.
- Mientras tanto, limpie la arena y los toboganes de vidrio transparente con agua y una toallita.
NOTA: No utilice etanol para limpiar las cámaras y los portaobjetos. - Prepare la cámara de grabación. Fije uno de los portaobjetos de vidrio microscópicos debajo de la cámara con cinta adhesiva.
- Cuando las moscas hayan sido anestesiadas sobre hielo, transfiera una mosca en cada cámara usando un cepillo limpio.
NOTA: Tanto las moscas macho como las femeninas se pueden utilizar en esta configuración, y, en la medida de lo posible, las moscas de ambos sexos deben ser analizadas para evitar el sesgo específico del sexo. - Fije la cámara con otra corredera de vidrio microscópica con cinta adhesiva(Figura 1C).
- Mantenga las moscas con cámara a temperatura ambiente durante 15 - 20 min para su aclimatación.
3. Generación de vídeos para el análisis FLLIT
NOTA: Este paso es específico de la cámara de vídeo utilizada. En este caso, se utiliza una cámara de vídeo disponible comercialmente (ver Tabla de Materiales).
- Encienda la fuente de alimentación. Espere a que el LED verde para la alimentación y el LED naranja para que la conexión de la interfaz Ethernet se estabilice. Encienda la alimentación del LED infrarrojo. Asegúrese de que la tensión permanezca a 12,5 V.
- Abra la aplicación Viewer en el sistema informático conectado.
- Cambie la velocidad de fotogramas de grabación a 1000 fps. Ajuste la velocidad de obturación a 1/1000 s (1 ms).
- Coloque la cámara con la mosca en la arena de grabación y seleccione el botón LIVE. Asegúrese de que la cámara esté enfocada en las puntas de las piernas cuando la mosca camina erguida sobre el suelo de la cámara; las puntas de las piernas deben estar enfocadas.
- Haga clic en Registro (Figura 2).
- Registre la mosca que camina, asegurándose de que:
La mosca caminó en una trayectoria relativamente recta sin tocar el borde de la arena.
La mosca caminó al menos tres pasos por pierna.
La mosca no se detiene durante el paseo.
La distancia recorrida es equivalente a al menos una longitud del cuerpo.
NOTA: Tener el fondo restado limpiamente es fundamental para una segmentación precisa. El algoritmo automatizado de resta de fondo empleado por FLLIT requiere que la mosca de la imagen mueva al menos una longitud del cuerpo en la distancia. - Haga clic en Rec Done para detener la grabación(Figura 2).
- Recortar el vídeo para asegurarse de que la grabación abarca sólo un paseo recto de la mosca (como se describe en el paso 3.6).
- Haga clic en Guardar (Figura 2). Guarde los archivos en formato '.mraw' o '.tiff' en las carpetas respectivas.
NOTA: El formato '.mraw' proporciona una mayor flexibilidad para cambiar el nombre del archivo (si es necesario) y para el almacenamiento de vídeos en comparación con el formato de archivo '.tiff'.
4. Instalación del programa FLLIT
NOTA: Las instrucciones actualizadas se pueden encontrar en: https://github.com/BII-wushuang/FLLIT/blob/master/Compiled/Readme.pdf
- Descargar FLLIT en cualquier sistema operativo
- Descargue FLLIT desde el siguiente enlace de Github: https://github.com/BII-wushuang/FLLIT/archive/master.zip. Extraiga el contenido del archivo zip.
- Descargue conjuntos de datos de ejemplo desde el siguiente enlace de Google Drive: https://bit.ly/2EibvNY. Cree una carpeta Datos en FLLIT-master/Compiled y coloque carpetas de conjunto de datos en este directorio de datos.
- Instalar FLLIT en Ubuntu
- Navegue al directorio FLLIT/Compiled.
- Haga clic con el botón derecho y seleccione Abrir en Terminal.
- Ejecute el siguiente comando para descargar e instalar las bibliotecas en tiempo de ejecución de MATLAB en $HOME/MCR:
bash MCR_2016a.sh - Una vez completada la instalación de las bibliotecas en tiempo de ejecución de MATLAB, ejecute el siguiente comando para asegurarse de que se conceden derechos ejecutables a FLLIT:
chmod +x FLLIT - Abra un terminal en el directorio FLLIT/Compiled y emita el siguiente comando para ejecutar FLLIT:
bash run_FLLIT.sh $HOME/MCR/v901
- Instalar FLLIT en Windows
- Para 7 y 10th Home Edition, instale Docker Toolbox en:
(https://github.com/docker/toolbox/releases/download/v19.03.1/DockerToolbox-19.03.1.exe). - Para Windows 10 Pro o Enterprise Edition, instale Docker Desktop para Windows en: (https://download.docker.com/win/stable/Docker-%20Desktop-%20Installer.exe).
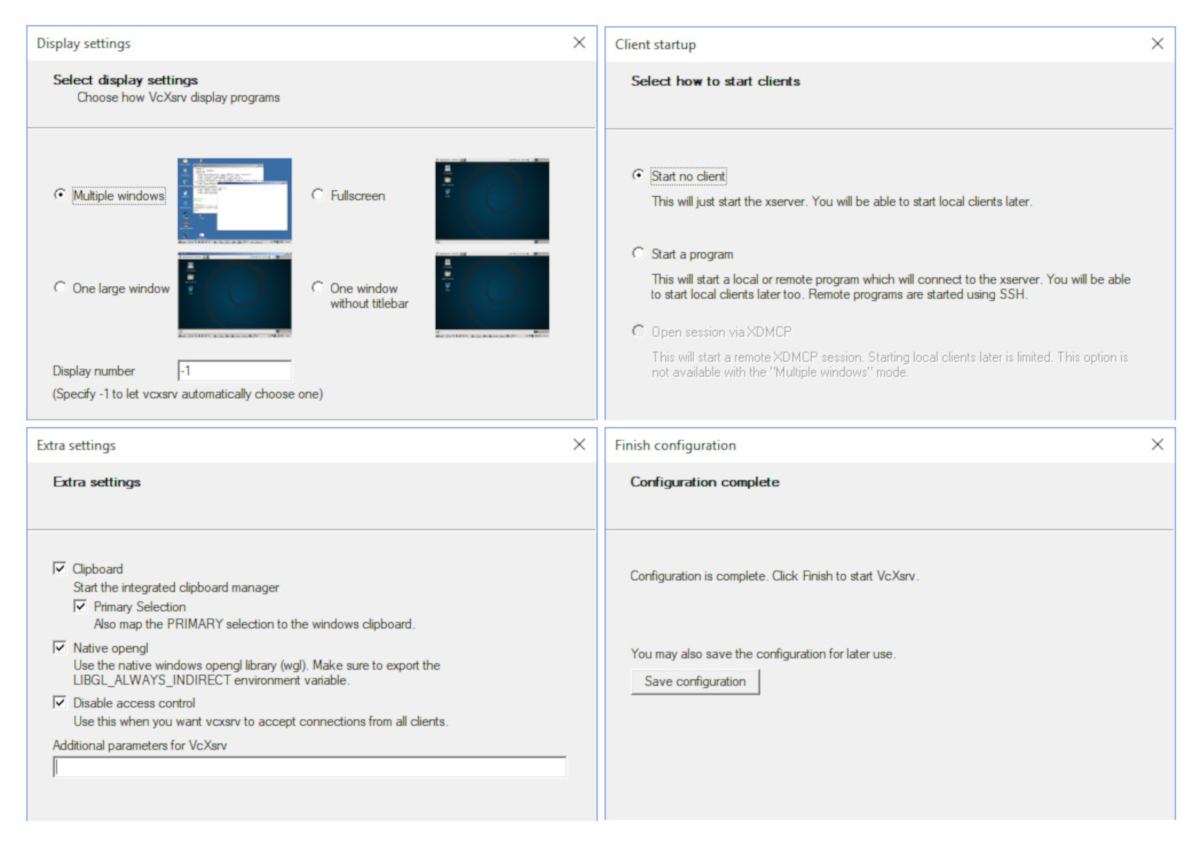
- Para habilitar la ejecución de aplicaciones GUI en un contenedor Docker en Windows, instale primero VcXSrV (https://sourceforge.net/projects/vcxsrv). Al iniciar VcXsrv, configure los valores como en la Figura S1.
NOTA: Asegúrese de que Docker y VcXsrv se estén ejecutando antes de iniciar FLLIT. - Haga doble clic en FLLIT.bat para ejecutar FLLIT.
NOTA: Al ejecutar por primera vez, tardará algún tiempo en extraer la imagen de Docker de Docker Hub.
- Para 7 y 10th Home Edition, instale Docker Toolbox en:
- Instalar FLLIT en MacOS
- Descargue Docker Desktop para MacOS en https://download.docker.com/mac/stable/Docker.dmg
- Instale socat abriendo un terminal y emitiendo el siguiente comando:
cerveza instalar socat - Comience socat con:
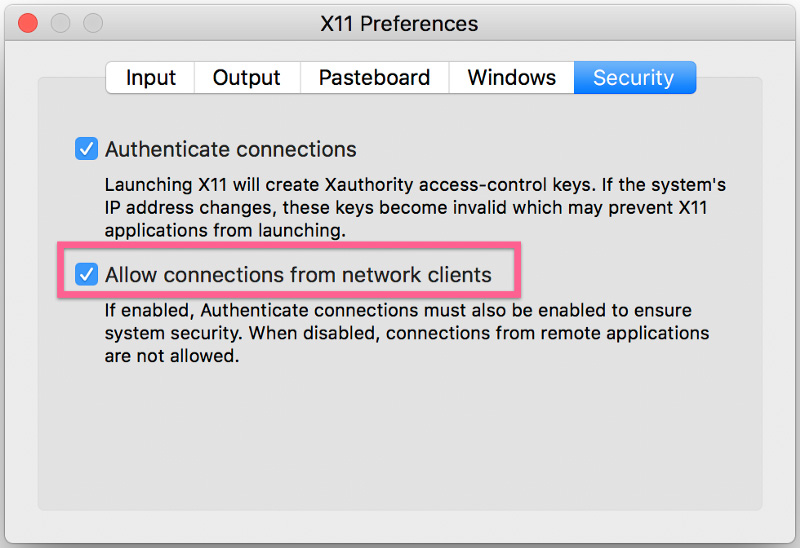
socat TCP-LISTEN:6000,reuseaddr,fork UNIX-CLIENT: "$DISPLAY" y repudiar - Instale XQuartz (https://www.xquartz.org) para habilitar la ejecución de aplicaciones GUI en un contenedor Docker en MacOS. Inicie XQuartz y cambie las preferencias marcando Permitir conexiones de clientes de red en la ficha Seguridad como se muestra en la Figura S2.
NOTA: Asegúrese de que Docker, socat y XQuartz se estén ejecutando antes de iniciar FLLIT. - Abra un terminal en el directorio FLLIT/Compiled y ejecute FLLIT con el siguiente comando:
golpear FLLIT_Mac.sh
NOTA: Al ejecutar por primera vez, tardará algún tiempo en extraer la imagen de Docker de Docker Hub.
5. Ejecución de FLLIT para el seguimiento automatizado de las piernas
- Segmentación
- Convierta el vídeo en archivos TIFF individuales y cópielo en la carpeta de datos FLLIT.
- Ejecute FLLIT (En Ubuntu, haga clic con el botón derecho para abrir FLLIT en Terminal).
- Seleccione la carpeta que contiene las imágenes TIFF fotograma a fotograma del vídeo que se va a realizar el seguimiento y haga clic en el botón Agregar.
- En la ventana emergente, seleccione 0 para llevar a cabo la segmentación de tramos únicamente, o 1 para incluir el seguimiento de piernas con la segmentación de patas.
- Haga clic en Listo para iniciar la segmentación y el seguimiento del vídeo seleccionado.
- Seguimiento
- Para comprobar la precisión del seguimiento y realizar correcciones de errores (si las hay), haga clic en Seleccionar carpetade datos . Seleccione la carpeta a la que se va a realizar el seguimiento y haga clic en Abrir.
- Haga clic en Ver seguimiento.
NOTA: Compruebe que el modo Visor permanece seleccionado mientras visualiza las posiciones de las piernas rastreadas. De lo contrario, las correcciones anteriores realizadas serán sobre-montados. - Compruebe el etiquetado de todas las patas en el primer fotograma
NOTA: Dado que las etiquetas de las piernas se colocan de acuerdo con la posición en la pantalla, si la mosca camina erguida, el lado derecho de la mosca se etiqueta como L1 (pierna delantera), L2 (pierna media), L3 (pata trasera) y el lado izquierdo de la mosca está etiquetado como R1 (pierna delantera), R2 (pierna media), R3 (pata trasera), respectivamente (Figura 3). Si la mosca camina al revés, las etiquetas de las patas se anotarán correctamente. - Si una pierna está etiquetada erróneamente y se requiere una corrección, haga clic en Pausar visualización, seguido de Ajustar predicción (Figura 3).
- En el panel derecho que se dirige Pierna para Ajustar, seleccione la pierna que requiera corrección.
- Haga doble clic en la posición correcta para esta pierna en la ventana de la imagen, haga clic en Guardary, a continuación, en Salir. Para ir al fotograma anterior o al fotograma posterior, haga clic en Pausar visualización seguida de los botones hacia delante y hacia atrás e I>, respectivamente(Figura 3).
- Para corregir los vídeos de seguimiento incorrectos, abra la carpeta Datos del vídeo que se va a volver a realizar y seleccione Iniciar seguimiento manualmente.
- Haga clic en el botón Seguimiento, que cambiará su etiqueta a Inicial.
- Haga clic en Ajustar predicción y corrija las etiquetas de las piernas haciendo doble clic en cada punta de la pierna y, a continuación, asignándola con la etiqueta de pierna correcta. Haga clic en Guardar y salir.
- Haga clic en Reanudar para iniciar el seguimiento.
- Procesamiento de datos y generación de vídeo
- Haga clic en Proceso de datos. En la ventana emergente, escriba el número de fotogramas por segundo (fps) en el que se grabaron los vídeos (por ejemplo, 1.000 fps).
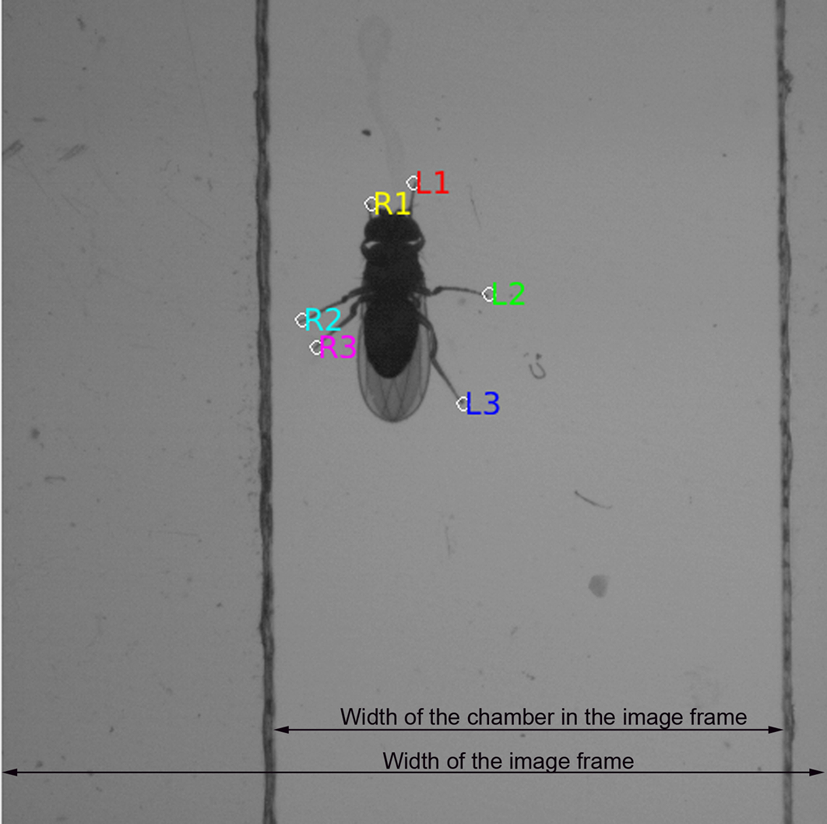
- Utilice la siguiente ecuación para calcular el campo de visión real del vídeo capturado de modo que los parámetros de la marcha se puedan medir en milímetros:

NOTA: Por ejemplo, si el tamaño real de la cámara es de 7 mm, el ancho del marco de la imagen es de 137 mm, el ancho de la cámara en el marco de imagen en la pantalla del ordenador es de 81 mm y el ancho del campo de visión es de 11,83 mm(figura S3). - Para ver los resultados del seguimiento, vaya a la carpeta Seguimiento en la carpeta Resultados.
- Para generar un vídeo de la mosca rastreada, seleccione Crear vídeo. El vídeo se guardará en la misma carpeta Resultados que la de los datos de vídeo originales analizados.
NOTA: Se pueden seleccionar los fotogramas Inicio (primer) y Fin (último) del vídeo.
- Normalización a la longitud del cuerpo de cada mosca.
NOTA: Como cada mosca puede ser ligeramente diferente en tamaño, ciertos parámetros de marcha deben normalizarse a la longitud del cuerpo de cada mosca para facilitar las comparaciones (por ejemplo, la longitud de zancada puede ser más larga en moscas más grandes y más corta en moscas más pequeñas).- Abra tres imágenes fijas del vídeo de cada mosca (normalmente el primer, medio y el último fotograma) utilizando el software de imagen.
- Amplíe cada fotograma de imagen al 800% y etiquete el píxel anterior de la cabeza y el píxel posterior del abdomen en la línea media utilizando un color brillante (por ejemplo, amarillo).
- Abra las imágenes etiquetadas en ImageJ.
- Utilice Establecer escala para introducir la escala en consecuencia: Establecer distancia en píxeles: 512; Distancia conocida: Campo de visión real (mm) medido en el paso 5.3.2.; Unidad de longitud: mm.
- Dibuja una línea recta entre la cabeza etiquetada y los píxeles de la punta del abdomen para obtener la longitud del cuerpo.
- Abra Establecer escala de nuevo para obtener el valor en una distancia conocida, que es la longitud del cuerpo en mm.
- Tome un promedio de la longitud determinada en cada una de las tres imágenes para obtener el tamaño promedio del cuerpo en mm.
Resultados
Tras la segmentación, seguimiento y procesamiento de datos de las piernas, FLLIT genera automáticamente datos sin procesar para las posiciones del cuerpo y cada garra de la pierna, 20 parámetros de marcha, 5 gráficas y un vídeo rastreado (Tabla 1).
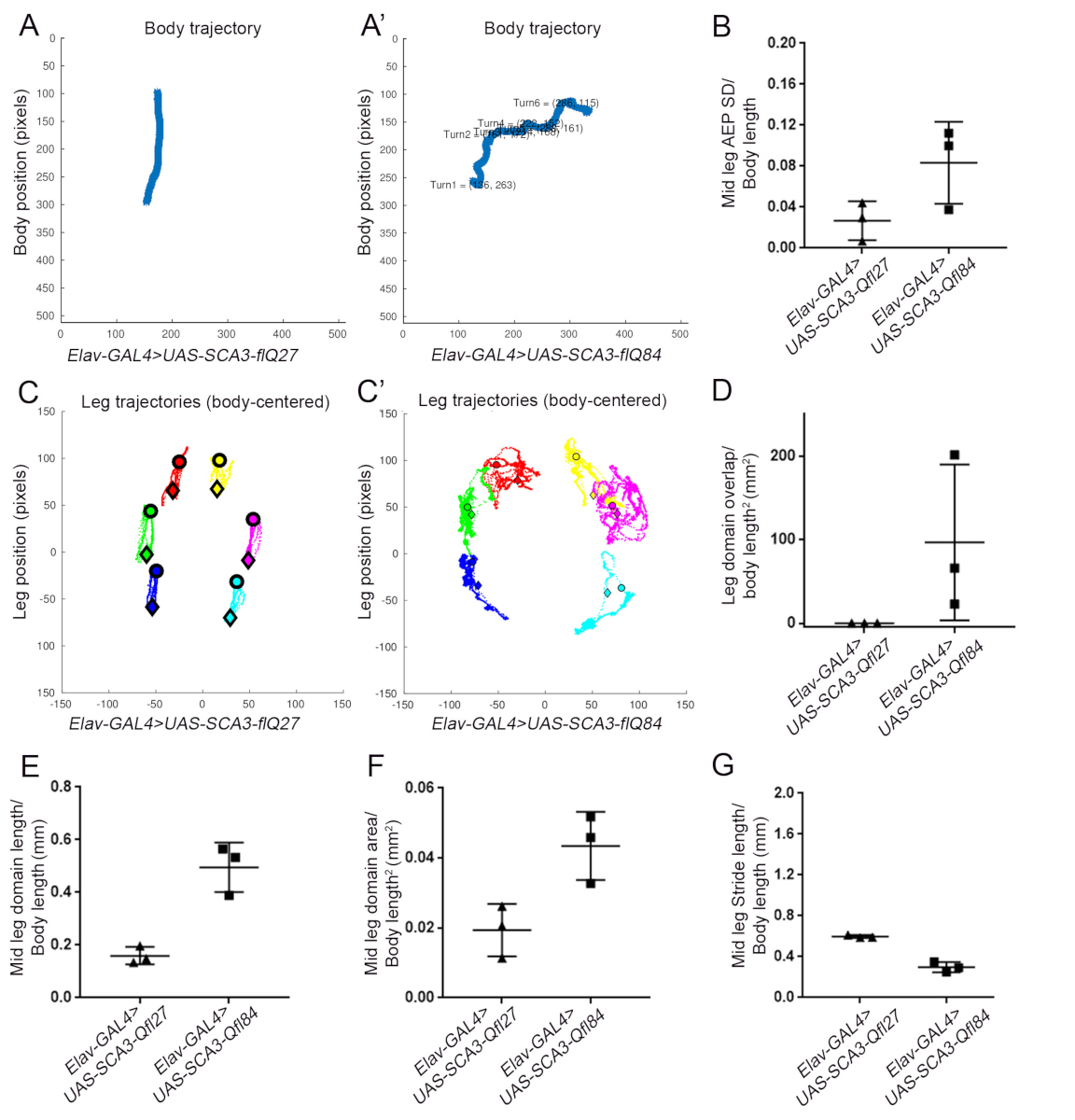
Aquí, demostramos estos análisis utilizando un modelo de mosca de ataxia espinocerebelosa 3 (SCA3). El conductor pan-neuronal Elav-GAL4 fue utilizado para conducir el SCA3 humano de tipo salvaje de longitud completa con 27 glutaminas en el tracto polyQ (UAS-SCA3-flQ27), o un mutante de longitud completa humano SCA3 con 84 glutaminas en el tracto polyQ (UAS-SCA3-flQ84)11. SCA3 se caracteriza por una marcha ataxica con veering corporal, colocación errática del pie y pasos cortos y de acecho12,13 (Tabla 2). Para caracterizar la marcha de las moscas mutantes SCA3 e investigar si muestran una marcha similar a la de los pacientes humanos, analizamos los parámetros de marcha relevantes generados por FLLIT, a saber: Número de giros corporales, regularidad de la huella, superposición y tamaños del dominio de las piernas, y longitudes de zancada de las piernas(Tabla 2).
Encontramos que las moscas SCA3-Q84 exhibieron más giros(Figura 4A, A'),colocación errática del pie como se muestra por la regularidad de baja huella (desviaciones estándar ampliadas del AEP14)(Figura 4B),aumento de la superposición de dominio de pierna(Figura 4C-D),dominios de pierna agrandados en longitud y área(Figura 4E,F),y disminución de la longitud de zancada (Figura 4G).
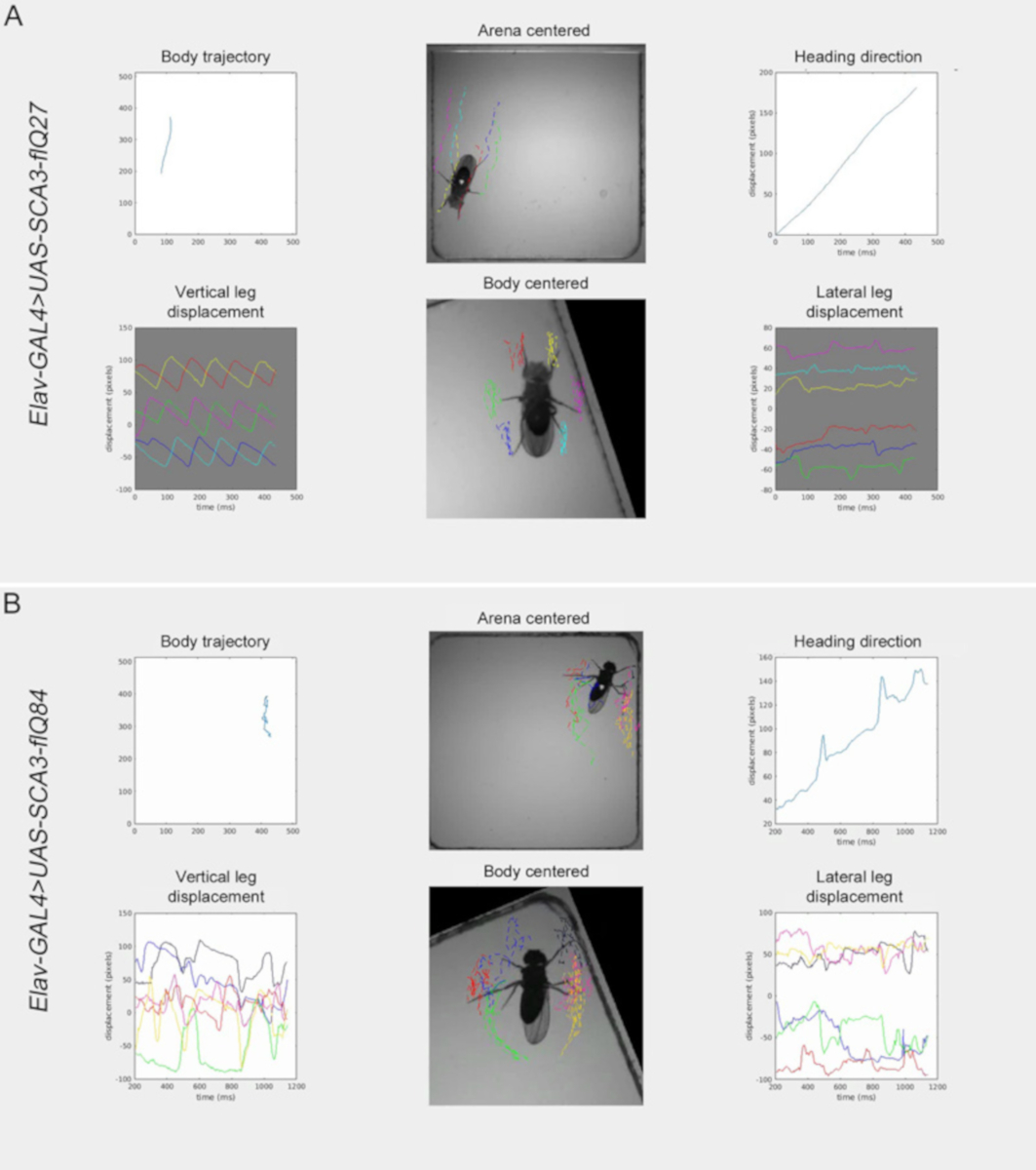
FLLIT también genera un vídeo que muestra la mosca y las patas rastreadas en las vistas centradas en la arena y centradas en el cuerpo, la trayectoria del cuerpo y la dirección del rumbo, y los desplazamientos verticales y laterales de cada pierna(Figura 5). Los videos rastreados permiten la comparación lado a lado de los movimientos de las piernas en diferentes moscas. Videos representativos de Elav-GAL4>SCA3-flQ27 (Video 1) y Elav-GAL4>SCA3-flQ84 (Video 2) moscas demuestran que en comparación con Elav-GAL4>UAS-SCA3-flQ27 moscas (Figura 5A), Elav-GAL4>UAS-SCA3-flQ84 moscas (Figura 5B) dominios de piernas intersectantes de diferentes tamaños, indicativos de una marcha ataxica y alacón.

Figura 1. Configuración de la estación de grabación y la arena. Grabaciones desde las vistas laterales (A) y (B). (C) Un ejemplo de una arena utilizada para realizar grabaciones de mosca para el seguimiento FLLIT. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 2: Vista de la ventana activa durante la grabación de marcha con una cámara de doble cabezal, que permite la grabación simultánea de dos moscas. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 3: Ventana FLLIT activa que muestra el panel de botones y las patas etiquetadas después de la segmentación y el seguimiento. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 4: Datos representativos generados por FLLIT para los parámetros de marcha relevantes de las moscas que expresan el wildtype (SCA3-flQ27) frente al mutante (SCA3-flQ84) SCA3. (A) Número de giros en la trayectoria corporal. (B) Regularidad de la huella de pierna media normalizada a la longitud del cuerpo. (C-C') Dominios de tramos atravesados de cada tramo. (D) Superposición de dominio entre tramos. (E) Longitud del dominio de la pierna media normalizada a la longitud del cuerpo. (F) Zona de dominio de pata media normalizada a la longitud del cuerpo2. (G) Longitud media de zancada normalizada a la longitud del cuerpo. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 5: Instantánea de vídeos representativos generados por FLLIT. (A) Elav-GAL4>UAS-SCA3-flQ27 y (B) Elav-GAL4>UAS-SCA3-flQ84 vuela. Please click here to view a larger version of this figure.
{kind=link}

Vídeo 1: Vídeo representativo de una mosca que expresa la ínficia de tipo salvaje panneuronal SCA3 (Elav-GAL4>UAS-SCA3-flQ27). Por favor, haga clic aquí para ver este video. (Haga clic con el botón derecho para descargar.)

Video 2: Video representativo de una mosca que expresa el mutante panneuronal humano de larga duración SCA3 (Elav-GAL4>UAS-SCA3-flQ84). Por favor, haga clic aquí para ver este video. (Haga clic con el botón derecho para descargar.)

Figura suplementaria 1: Configuraciones para VcXSrv. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura suplementaria 2: Configuración para Xquartz. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura complementaria 3: Imagen etiquetada con las dimensiones necesarias para calcular el campo de visión. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
| Categoría | Parámetros | Descripción | Archivo/Trazado (si corresponde) |
| Datos sin procesar | Posición del cuerpo | Coordenadas posicionales del centroide del cuerpo en cada fotograma | Las dos primeras columnas de CoM.csv |
| Trayectoria corporal | Angulo de rotación del eje del cuerpo en grados (en relación con el eje Y) | Tercera columna de CoM.csv | |
| Garra de pierna centrada en la arena Posiciones | Coordenadas posicionales de cada garra de la pierna en cada fotograma en función de las coordenadas de la arena | trajectory.csv | |
| Garra de pierna centrada en el cuerpo Posiciones | Coordenadas posicionales de cada garra de la pierna en cada marco basado en las coordenadas de la arena | norm_trajectory.csv | |
| Movimiento corporal | Longitud del cuerpo (mm) | Longitud del animal de muestra estimada en cada fotograma (posición anterior-más en la cabeza a la posición en las alas) | bodylength.csv |
| Velocidad corporal instantánea (mm/s) | Velocidad instantánea del cuerpo (centroide) en el animal de muestra | BodyVelocity.csv; BodyVelocity.pdf | |
| Puntos de giro del cuerpo Trayectoria | Para localizar los puntos de inflexión, la trayectoria se reduce a una curva lineal por pieza utilizando el Dougl as-ASPeucker algoritmo, tras el cual se identifica un evento de torneado que implica un ángulo > 50 grados entre dos segmentos lineales que constituyen la trayectoria simplificada | BodyTrajectory.pdf | |
| Parámetros de zancada individuales | Duración de la zancada (ms) | La duración de un evento de zancada | StrideParameters.csv |
| Período de zancada (ms) | La duración de un evento de zancada al siguiente | ||
| Desplazamiento de zancada (mm) | Desplazamiento de la garra de la pierna durante un evento de zancada | ||
| Trayectoria de zancada cubierta (mm) | Ruta total cubierta por la garra de la pierna durante un evento de zancada | ||
| Posición extrema anterior (mm) | Posición de aterrizaje (en relación con el cuerpo) de una garra de la pierna al final de un evento de zancada | ||
| Posición extrema posterior (mm) | Posición de despegue (en relación con el cuerpo) de una garra de la pierna al comienzo de un evento de zancada | ||
| Amplitud de zancada (mm) | Desplazamiento a lo largo de la dirección del movimiento para un evento de zancada | ||
| Linealidad de postura (mm) | Definido como la desviación de la trayectoria de zancada de una curva suavizada (a intervalos de 20 ms) el anterior correspondiente y las posiciones extremas posteriores de la zancada | ||
| Estiramiento de zancada (mm) | Distancia de la posición de la garra de la pierna desde el centro del cuerpo en medio de un evento de zancada | ||
| Movimiento de la pierna | Velocidad de la pierna (mm/s) | La velocidad instantánea de cada pierna | LegSpeed.csv; Gait.pdf |
| Indice Gait | Esto mide el tipo de coordinación de la marcha exhibida por el animal de muestra (de seis patas) durante su movimiento. Una marcha el índice de 1 corresponde a una marcha del trípode, _1 corresponde a una marcha de tetrápodo mientras que 0 constituye una marcha no canónica. En nuestra implementación, el índice de marcha se obtiene por una media móvil sobre una ventana de 120 ms | GaitIndex.csv; GaitIndex.pdf | |
| Porcentaje de movimiento | Porcentaje del tiempo que una pierna está en movimiento | LegParameters.csv | |
| Período medio de zancada (ms) | Duración media de un evento de zancada al siguiente | LegParameters.csv | |
| Regularidad de la huella (mm) | Medidas como las desviaciones estándar de la | LegParameters.csv | |
| posiciones extremas anteriores de una pierna | |||
| Zona de dominio de trayectoria de tramo (mm2) | El área del casco convexo mínimo que contiene toda la trayectoria de la pierna en el marco de referencia centrado en el cuerpo | LegParameters.csv; LegDomain.pdf | |
| Longitud y anchura de la dominio de trayectoria de la pierna (mm) | Obtenido a través de la distancia máxima proyectada de las posiciones de garra en la mayor (longitud del dominio) y (ancho de dominio) ejes principales | LegParameters.csv | |
| Intersección/superposición de dominio de tramo (mm2) | La intersección/superposición entre cada posible | LegDomainOverlap.csv | |
| Anchura de posición (mm) | Promedio de la distancia entre el AEP y pep de las piernas izquierda y media | StanceWidth.csv |
Tabla 1: Parámetros de gama generados por FLLIT.
| Función Gait | ||||
| Características de la ataxia espinocerebelosa 3 (SCA3) | Virando | Colocación errática del pie y cruce de piernas | Pasos de alcateo | Pasos cortos |
| Parámetro de medición | Número de eventos de giro corporal | Regularidad de la huella | Tamaño de los dominios de tramo, grado de superposición de dominios | Longitud de zancada |
| Archivo FLLIT | BodyTrajectory.pdf | LegParameters.csv | LegDomainOverlap.csv | StrideParameters.csv |
Tabla 2: Tabla que muestra características distintivas de la marcha SCA3 en pacientes humanos con sus correspondientes parámetros FLLIT y archivos de salida.
Discusión
En este manuscrito, describimos en detalle los pasos involucrados en el uso de FLLIT, un programa automatizado de aprendizaje automático1,para analizar la marcha en Drosophilacaminando libremente. Después del seguimiento y análisis de datos, FLLIT genera automáticamente datos sin procesar para la información posicional del cuerpo y las garras de las piernas, produciendo veinte características de cuerpo y marcha, así como un video de la mosca rastreada para permitir la visualización de la marcha.
Ahora hay una serie de métodos para el seguimiento del movimiento de las piernas de Drosophila y otros animales1,2,3,4,14,15,16, dando a los investigadores una amplia gama de opciones dependiendo de los objetivos del experimento. Algunos de estos son enfoques basados en la impresión de pies, que son muy precisos pero que sólo informan de puntos de contacto de garra con la superficie de detección4,,14. Por otro lado, los recientes enfoques de aprendizaje profundo2,3,16 son altamente versátiles, permitiendo el análisis de comportamientos que requieren el seguimiento de las articulaciones de las piernas y otras partes del cuerpo en cualquier animal, con la advertencia de que los algoritmos necesitan ser entrenados primero con conjuntos de datos anotados por el usuario. Un tercer tipo de enfoque utiliza morfología o métodos basados en contraste de imagen1,15,17 para encontrar el contorno de cada pierna para identificar las posiciones de las garras. En general, estos métodos tratan mal con comportamientos en los que las piernas se cruzan (por ejemplo, durante el aseo). FLLIT combina el segundo y el tercer enfoque, utilizando parámetros morfológicos para entrenar un algoritmo de impulso para la segmentación de las piernas. Esto permite que FLLIT omita la laboriosa tarea de anotación de usuario para generar el conjunto de datos de entrenamiento, al tiempo que mejora la precisión mediante el aprendizaje automático. Las futuras mejoras en FLLIT tendrán que lidiar con casos en los que las piernas se cruzan, para permitir el análisis de comportamientos más complejos.
FLLIT es robusto para ligeros cambios en la iluminación, la resolución de grabación y la velocidad del fotograma1. Sin embargo, la velocidad de fotogramas de los vídeos grabados no debe estar por debajo de 250 fps, y FLLIT se ejecuta de forma óptima para vídeos grabados a 1000 fps. Si hay desenfoque de movimiento en las imágenes, de modo que es difícil para un anotador humano identificar la posición de la pierna, FLLIT no será capaz de identificar con precisión las puntas de las piernas en esos marcos. A la luz de esto, es esencial que la cámara se enfoque bruscamente en las puntas de las piernas. Para evitar artefactos de segmentación, la arena debe limpiarse a fondo y no debe moverse durante la grabación. Para una resta de fondo precisa y una segmentación limpia, la mosca debe moverse al menos una longitud del cuerpo durante la grabación, sin pausa. Después de la segmentación automática y el seguimiento del etiquetado de todas las patas deben ser revisados. Si la marcha no se rastrea o se rastrea mal, el archivo debe volver a rastrearse manualmente utilizando la opción Iniciar seguimiento manualmente (paso 5.2.7 – 5.2.10).
Las enfermedades neurodegenerativas y los trastornos del movimiento son cada vez más frecuentes en nuestras sociedades de envejecimiento. Los modelos fly de neurodegeneración se han estudiado durante más de 2 décadas, durante las cuales se han avanzado en los aspectos moleculares y celulares de la fisiopatología de la enfermedad. Sin embargo, las consecuencias conductuales específicas de la enfermedad han sido técnicamente difíciles de evaluar. Por ejemplo, mientras que los informes de temblores en la mosca se han hecho18,19, estos no habían sido estudiados cuantitativamente hasta hace poco1. El ensayo de escalada ha sido una medida útil y cuantitativa, pero relativamente gruesa6. Este déficit técnico ha obstaculizado de manera similar el análisis del movimiento de alta resolución en otros modelos animales. El advenimiento de nuevas herramientas para el análisis del comportamiento, por lo tanto, ha prometedo rejuvenecer el campo de los trastornos del movimiento para permitir a los investigadores estudiar cómo los mecanismos moleculares y celulares de las enfermedades neuromusculares conducen a resultados conductuales específicos en modelos animales. En este trabajo y en nuestro trabajo anterior1,mostramos utilizando FLLIT que los modelos fly de SCA3 exhiben una marcha ataxica hipercinética, mientras que los modelos PD fly exhiben una marcha rígida hipocinética, recapitulando las señas de identidad del movimiento de las respectivas enfermedades humanas1. El análisis de gait también nos permitió identificar distintas poblaciones neuronales subyacentes a disfunciones específicas del movimiento. En el futuro, el análisis detallado del movimiento, combinado con las potentes herramientas de imagen y funcionales disponibles sobre la marcha, nos permitirá obtener una visión novedosa de los mecanismos de disfunción locomotora, iluminando nuestra comprensión de las enfermedades neurodegenerativas con respecto a los mecanismos de circuito.
FLLIT debe ser ampliamente aplicable a la marcha de estudio en otros artrópodos pequeños, ya que se demostró anteriormente que era altamente preciso para el seguimiento de los movimientos de las patas de araña1. Si bien nos centramos aquí en el uso de fenotipados de movimiento detallados para cuantificar la marcha patógena y sus circuitos subyacentes, los avances en el seguimiento del movimiento ya han revolucionado, y tendrán un impacto continuo en la comprensión de la coordinación y la marcha a pie normales y sus circuitos subyacentes, especialmente en innumerables ramas diferentes del árbol evolutivo.
Divulgaciones
Los autores no tienen nada que revelar.
Agradecimientos
Los autores quieren agradecer a Moumita Chatterjee y Alice Liu por su apoyo técnico, y al Bloomington Drosophila Stock Centre (Indiana, EE.UU.) por poner a disposición las cepas Drosophila utilizadas en este trabajo. Este trabajo fue apoyado por el Instituto de Biología Molecular y Celular de Singapur; el Instituto de Bioinformática de Singapur; la Organización del Consejo Conjunto de la Agencia de Tecnología científica e Investigación (número de concesión 15302FG149 a SA y LC); el Programa Insignia de Investigación Clínica (Enfermedad de Parkinson) administrado por el Consejo Nacional de Investigación Médica del Ministerio de Salud de Singapur (número de subvención NMRC/TCR/013-NNI/2014 a SA), la Universidad de Alberta (subvención de inicio a LC) y la Beca de Descubrimiento del Consejo Nacional de Ciencias Naturales e Ingeniería del Canadá (NSERC) (número de concesión RGPIN-2019-04575 a LC).
Materiales
| Name | Company | Catalog Number | Comments |
| Acrylic Sheets | Dama | 1.6 mm thickness, Clear sheets | Singapore, Singapore |
| Clear Glass slides | Biomedia | BMH 880101 | Singapore, Singapore |
| High speed camera | Photron | Fastcam MC2.1 | Tokyo, Japan. A shutter speed of 1 msec or faster is ideal to reduce motion blur of captured images |
| Infra Red LED | Any - Generic from hardware store | 940nm Infrared Light Board | Singapore, Singapore |
| Kimwipe | Kimberly Clark | 34155-01LS | Irving, Texas, USA |
Referencias
- Wu, S., et al. Fully automated leg tracking of Drosophila neurodegeneration models reveals distinct conserved movement signatures. PLoS Biology. 17 (6), 3000346 (2019).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 19, 1281-1289 (2018).
- Pereira, T. D., et al. Fast animal pose estimation using deep neural networks. Nature Methods. 16 (1), 117-125 (2019).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Lu, B., Vogel, H. Drosophila models of neurodegenerative diseases. Annual Reviews in Pathology. 4, 315-342 (2009).
- McGurk, L., Berson, A., Bonini, N. M. Drosophila as an In Vivo Model for Human Neurodegenerative Disease. Genetics. 201 (2), 377-402 (2015).
- Dionne, H., Hibbard, K., Cavallaro, A., Kao, J. -. C., Rubin, G. M. Genetic reagents for making split-GAL4 lines in Drosophila. bioRxiv. , (2017).
- Cande, J., et al. Optogenetic dissection of descending behavioral control in Drosophila. eLife. 7, (2018).
- Nern, A., Pfeiffer, B. D., Rubin, G. M. Optimized tools for multicolor stochastic labeling reveal diverse stereotyped cell arrangements in the fly visual system. Proceedings of the National Academy of Sciences of the United States of America. 112 (22), 2967-2976 (2015).
- Xie, T., et al. A Genetic Toolkit for Dissecting Dopamine Circuit Function in Drosophila. Cell Reports. 23 (2), 652-665 (2018).
- Warrick, J. M., et al. Ataxin-3 suppresses polyglutamine neurodegeneration in Drosophila by a ubiquitin-associated mechanism. Molecular Cell. 18 (1), 37-48 (2005).
- Ebersbach, G., et al. Comparative analysis of gait in Parkinson's disease, cerebellar ataxia and subcortical arteriosclerotic encephalopathy. Brain. 122 (7), 1349-1355 (1999).
- Stolze, H., et al. Typical features of cerebellar ataxic gait. Journal of Neurology, Neurosurgery and Psychiatry. 73 (3), 310-312 (2002).
- Mendes, C. S., Bartos, I., Akay, T., Marka, S., Mann, R. S. Quantification of gait parameters in freely walking wild type and sensory deprived Drosophila melanogaster. eLife. 2, 00231 (2013).
- DeAngelis, B. D., Zavatone-Veth, J. A., Clark, D. A. The manifold structure of limb coordination in walking Drosophila. eLife. 8, (2019).
- Gunel, S., et al. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. eLife. 8, (2019).
- Isakov, A., et al. Recovery of locomotion after injury in Drosophila melanogaster depends on proprioception. The Journal of Experimental Biology. 219, 1760-1771 (2016).
- Aw, S. S., Lim, I. K. H., Tang, M. X. M., Cohen, S. M. A Glio-Protective Role of mir-263a by Tuning Sensitivity to Glutamate. Cell Reports. 19 (9), 1783-1793 (2017).
- Eberl, D. F., Duyk, G. M., Perrimon, N. A genetic screen for mutations that disrupt an auditory response in Drosophila melanogaster. Proceedings of the National Academy of Sciences of the United States of America. 94 (26), 14837-14842 (1997).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados