
Method Article
기능 학습 다리 세분화 및 추적 (FLLIT)를 사용하여 자유롭게 움직이는 곤충에서 완전 자동화 된 다리 추적
요약
우리는 FLLIT, 자유롭게 움직이는 Drosophila 멜라노가스터 및 기타 곤충에서 다리 발톱 운동 추적을위한 완전 자동화 된 기계 학습 방법을 사용하기위한 자세한 프로토콜을 설명합니다. 이 프로토콜은 야생 형 파리, 돌연변이 파리 및 신경 변성의 비행 모델에서 미묘한 보행 걸음 걸이 움직임을 정량적으로 측정하는 데 사용할 수 있습니다.
초록
Drosophila 모형은 신경 기능의 연구 결과및 신경 변성의 기초가 되는 분자와 세포 기계장치를 이해하기를 위해 귀중했습니다. 신경 부집합의 조작 그리고 연구 결과를 위한 비행 기술은 점점 더 정교해지는 동안, 결과적인 행동 표현형의 풍요로움은 유사한 세부사항에서 포착되지 않았습니다. 돌연변이 간의 비교를 위해 미묘한 플라이 다리 움직임을 연구하려면 고속 및 빠른 다리 움직임을 자동으로 측정하고 정량화할 수 있는 능력이 필요합니다. 따라서, 우리는 자유롭게 걷는 파리에서 자동 다리 발톱 추적을위한 기계 학습 알고리즘을 개발, 기능 학습 기반 의 사지 세분화 및 추적 (FLLIT). 대부분의 딥 러닝 방법과 달리 FLLIT은 학습 알고리즘에 내장된 형태학적 매개 변수를 사용하여 사용자 추가 없이 완전히 자동화되고 자체 교육 세트를 생성합니다. 이 문서에서는 FLLIT를 사용하여 보행 분석을 수행하기 위한 심층 프로토콜에 대해 설명합니다. 카메라 설정, 경기장 건설, 비디오 녹화, 다리 세그미테이션 및 다리 발톱 추적 절차를 자세히 설명합니다. 또한 모든 비디오 프레임에서 원시 추적 된 몸과 다리 위치, 20 걸음걸이 매개 변수, 5 플롯 및 추적 된 비디오를 포함하는 FLLIT에 의해 생성 된 데이터의 개요를 제공합니다. FLLIT의 사용을 입증하기 위해, 우리는 Spinocerebellar 운동 실조 3의 플라이 모델에서 관련 병이 걸음걸이 매개 변수를 정량화.
서문
지난 수십 년 동안, 신경 퇴행성 질환과 운동 장애는 우리의 노화 인구에서 더 널리 성장했다. 많은 신경 퇴행성 질환에 대한 우리의 이해가 분자 및 세포 수준에서 진행되었지만, 영향을받는 신경 회로의 근본적인 특징은 제대로 이해되지 않습니다. 최근에 개발된 행동 추적 도구1,,2,,3,,4는 이제 분자, 세포 및 회로 dysregulation 기본 질병을 확인하기 위해 동물 질병 모델의 운동 이상을 연구할 수 있게 되었습니다.
많은 신경퇴행성 질환에 관여하는 분자경로는 열매파리에 보존되어 초파리멜라노가스터,및 초파리질환 모델은 신경변성 기저의 근본적인 기전을 해명하는데 도움을 주었다5,,6. 우리는 최근에 파킨슨 병 (PD)와 척추 세포 자 운동 실조 3 (SCA3)의 비행 모델이 각각의 인간 질병과 유사한 뚜렷하고 보존 된 보행 시그니처를 나타낸다는 것을 보여주었습니다1,비행 모델이 특정 운동 장애에서 운동 기능 장애의 기본 회로 메커니즘을 이해하는 데 사용될 수 있음을 입증. 단일 유전자 및 단일 세포 레벨7,,8,,9,,10에서 뉴런의 표적 조작 및 시각화를 위한 플라이 모델에서 풍부하고 지속적으로 성장하는 도구는 비행이 생체 내에서 질병 경로, 신경 회로 및 행동 표현형 발현 사이의 관계를 탐구하는 이상적인 모델입니다. 정밀하고 자동화된 곤충 보행 분석을 가능하게 하기 위해, 우리는 최근에 기계 학습 방법, Feature L수입 기반 LIMB 세분화 및 T랙팅 (FLLIT)1을개발했습니다.
FLLIT은 먼저 다리 픽셀을 분할하는 완전 자동화된 다단계 알고리즘으로 구성되어 있으며, 이 알고리즘은 이후에 해당 다리 발톱을 찾고 추적하는 데 사용됩니다. FLLIT은 최근 작업2,,3에서사용되는 딥 러닝 알고리즘과 는 달리 세분화를 위한 부스팅 알고리즘을 사용합니다. 두 프레임워크 모두에 대해 기능 추출이 컨볼루션 커널 학습을 통해 자동으로 수행된다는 점에서 컨볼루션 신경망과 몇 가지 유사점이 있습니다. FLLIT의 첫 번째 단계는 형태학적 작업(가장자리 및 골격화)을 사용하여 자동으로 포지티브(다리의 픽셀) 및 음수(플라이 바디의 배경 또는 픽셀) 학습 샘플을 높은 신뢰도로 생성하는 것입니다. 따라서 FLLIT는 완전히 자동화되어 있으며 사용자에게 추가된 교육 샘플이 필요하지 않습니다. 위의 학습 샘플을 사용하여 분류기는 증폭 알고리즘의 프레임워크에서 학습됩니다. 약한 분류기의 앙상블은 반복적으로 학습되며, 각각 기능 추출 및 의사 결정 트리를 위한 컨볼루션 커널 세트로 구성됩니다. 최종 학습 분류기는 다음 다리 세분화에 사용되며 형태 학적 작업보다 어려운 영역 / 하드 샘플을 더 잘 분별 할 수 있으며 추적1을위해 전반적으로 훨씬 더 정확한 세분화를 생성합니다. 분할된 다리에서 팁을 찾아 헝가리 알고리즘을 사용하여 추적합니다. FLLIT은 마지막으로 본 위치(플라이 중심 좌표)를 기억하여 다리 끝이 더 이상 폐색되지 않도록 하여 오클루전 케이스를 처리할 수 있습니다.
우리는 이전에 FLLIT가 자동으로 정확하게 다리의 움직임을 추적하고 고속 비디오1에서표시되지 않은 자유롭게 움직이는 비행 또는 거미에서 걸음걸이를 분석 할 수 있음을 보여 주었다; 따라서 FLLIT은 절지동물 다리 추적에 광범위하게 적용되어야 합니다. 형태학적 매개 변수를 사용하여 기계 학습 교육 세트를 추출함으로써 FLLIT은 대부분의 딥 러닝 방법에 필요한 까다로운 수동 추가 없이 곤충 다리를 세그먼트화하고 추적하도록 자동으로 학습합니다. 따라서 FLLIT은 완전히 자동화되어 있습니다. 다리 세분화 및 추적 후 FLLIT은 모든 비디오 프레임에서 원시 추적 된 신체 및 다리 위치, 20 걸음걸이 매개 변수, 5 플롯 및 걸음걸이 움직임의 걸음걸이 분석 및 시각화를위한 추적 된 비디오를 자동으로 생성합니다. 이 프로토콜은 FLLIT 사용에 대한 단계별 가이드를 제공합니다.
프로토콜
1. 시스템 설정
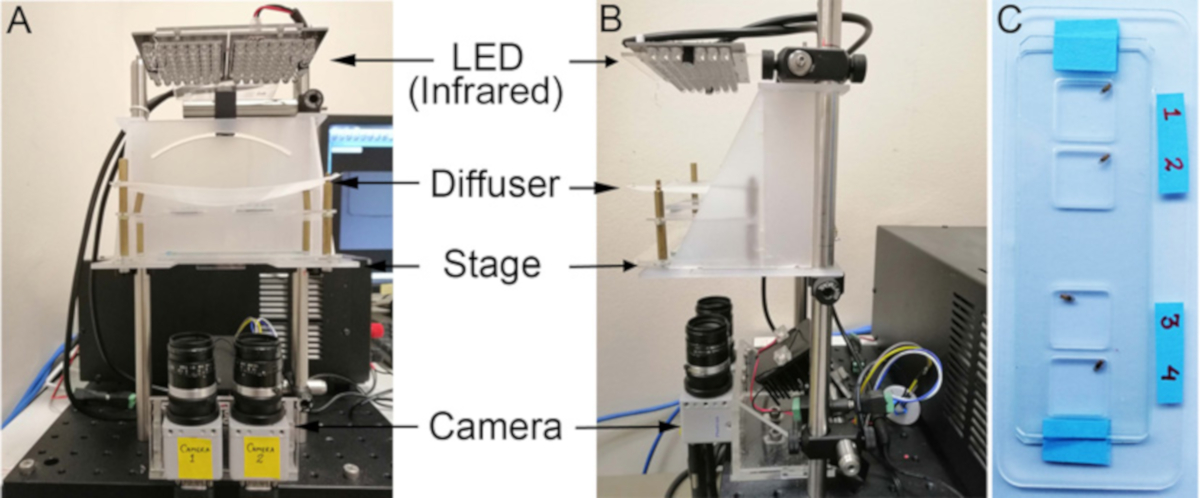
- 레코딩 스테이션에 고속 카메라와 무대가 있어 아레나 챔버를 고정해야합니다(그림 1). 이에 따라 빠른 셔터 속도로 초당 최소 250프레임(fps)으로 녹화하도록 카메라를 조정합니다(이 경우 셔터 속도가 1ms인 1000fps로 녹화됨).
참고: 비디오가 모든 프레임에서 움직이는 다리의 모션 블러가 최소화되거나 없는지 확인하여 추적에 적합한지 확인합니다. 움직이는 다리가 너무 흐려서 사람의 비터가 추적할 수 없는 경우 카메라 녹화 속도 및/또는 셔터 속도를 높여야 합니다. - 적외선 LED 조명을 카메라와 샘플 사이에 디퓨저(반투명 시트)로 스테이지 상단에 놓습니다(그림1A, B).
- 1.6mm 두께의 아크릴 시트를 절단하여 녹음 챔버를 확인합니다. 이 실험에서는 11 mm x 11 mm의 시야각을 사용합니다.Figure 1C
2. 녹음을위한 파리의 준비
- 파리를 새로운 음식 바이알로 기록하기 위해 24시간 전에 기록한다.
참고: 녹화 하기 전에 24 시간 미만의 파리에 CO2 (일반적으로 첫 번째 수집 시 파리를 마취 하는 데 사용)를 사용 하지 마십시오. - 녹화하기 약 40 분 전에 파리를 빈 바이알로 옮기고 5-7 분 동안 얼음을 유지하십시오.
- 그 동안, 경기장과 맑은 유리 슬라이드를 물과 닦아 닦아 닦아.
참고: 에탄올을 사용하여 챔버와 슬라이드를 청소하지 마십시오. - 녹음 실을 준비합니다. 테이프로 챔버 아래에 미세한 유리 슬라이드 중 하나를 고정합니다.
- 파리가 얼음에 마취되면 깨끗한 브러시를 사용하여 각 챔버에 한 마리의 파리를 옮김을 옮김을 옮김을 옮김을 옮김을 더합니다.
참고 : 남성과 여성 파리는 이 설정에서 사용할 수 있으며, 가능한 한 남녀 의 파리는 성별 별 편견을 피하기 위해 분석해야합니다. - 테이프로 다른 현미경 유리 슬라이드로 챔버를 고정합니다(그림1C).
- 체임버 파리를 실온에서 15 -20 분 동안 보관하십시오.
3. FLLIT 분석을 위한 비디오 생성
참고: 이 단계는 사용된 비디오 카메라에만 해당됩니다. 이 경우 시판되는 비디오 카메라가 사용됩니다(재료 표참조).
- 전원을 켭니다. 전원이 공급되고 이더넷 인터페이스 연결이 안정화될 때까지 녹색 LED가 켜지도록 기다립니다. 적외선 LED의 전원을 켭타. 전압이 12.5V로 유지되도록 합니다.
- 연결된 컴퓨터 시스템에서 뷰어 응용 프로그램을 엽니다.
- 레코딩 프레임 속도를 1000fps로 변경합니다. 셔터 속도를 1/1000s(1ms)로 설정합니다.
- 녹음 장에 플라이와 챔버를 배치하고 라이브 버튼을 선택합니다. 비행이 챔버의 바닥에 똑바로 걷고있을 때 카메라가 다리 끝에 초점을 맞추고 있는지 확인하십시오. 다리 끝은 날카로운 초점에 있어야합니다.
- 레코드를 클릭합니다(그림 2).
- 플라이 워킹을 기록하여 다음을 확인합니다.
플라이는 경기장 가장자리를 건드리지 않고 비교적 직선궤도로 걸었다.
비행은 다리 당 적어도 세 보폭을 걸었다.
비행은 걷는 동안 멈추지 않습니다.
보행 거리는 하나 이상의 바디 길이와 동일합니다.
참고: 배경을 깨끗하게 차감하는 것은 정확한 세분화를 위해 매우 중요합니다. FLLIT에 의해 사용되는 자동 배경 빼기 알고리즘은 이미지 플라이가 거리에서 적어도 하나의 신체 길이를 이동하도록 요구합니다. - 녹화를 중지하려면 완료 완료를 클릭합니다(그림2).
- 비디오가 플라이의 직선 보행만 포함되도록 비디오를 자르기(3.6단계에서 설명한 대로).
- 저장을 클릭합니다(그림 2). 파일을 '.mraw' 또는 '.tiff' 형식으로 각 폴더에 저장합니다.
참고: '.mraw' 형식은 '.mraw' 파일 형식에 비해 파일 이름(필요한 경우)을 변경하고 비디오 저장에 더 큰 유연성을 제공합니다.
4. FLLIT 프로그램의 설치
참고: 최신 지침은 https://github.com/BII-wushuang/FLLIT/blob/master/Compiled/Readme.pdf
- 모든 운영 체제에서 FLLIT 다운로드
- 다음 Github 링크에서 FLLIT을 다운로드합니다: https://github.com/BII-wushuang/FLLIT/archive/master.zip. zip 파일의 내용을 추출합니다.
- 다음 Google 드라이브 링크에서 샘플 데이터 세트를 다운로드합니다: https://bit.ly/2EibvNY. FLLIT 마스터/컴파일된 폴더 데이터를 만들고 이 데이터 디렉터리에서 데이터 집합 폴더를 배치합니다.
- 우분투에 FLLIT 설치
- FLLIT/컴파일된 디렉토리로 이동합니다.
- 마우스 오른쪽 단추로 클릭하고 터미나 l에서 열기를선택합니다.
- 다음 명령을 실행하여 MATLAB 런타임 라이브러리를 다운로드하여 $HOME/MCR에 설치합니다.
배쉬 MCR_2016a.sh - MATLAB 런타임 라이브러리 설치가 완료된 후 다음 명령을 실행 권한이 FLLIT에 부여되도록 합니다.
chmod +x FLLIT - FLLIT/컴파일된 디렉터리에서 터미널을 열고 다음 명령을 실행하여 FLLIT을 실행합니다.
bash run_FLLIT.sh $HOME/MCR/v901
- 윈도우에 FLLIT 설치
- 7 및 10 번째 홈 에디션의 경우 다음에서 Docker 도구 상자를 설치하십시오.
(https://github.com/docker/toolbox/releases/download/v19.03.1/DockerToolbox-19.03.1.exe)을 참조하십시오. - 윈도우에 대 한 10 프로 또는 엔터프라이즈 에디션, 에 Windows용 도커 데스크톱을 설치: (https://download.docker.com/win/stable/Docker\%20Desktop\%20Installer.exe).
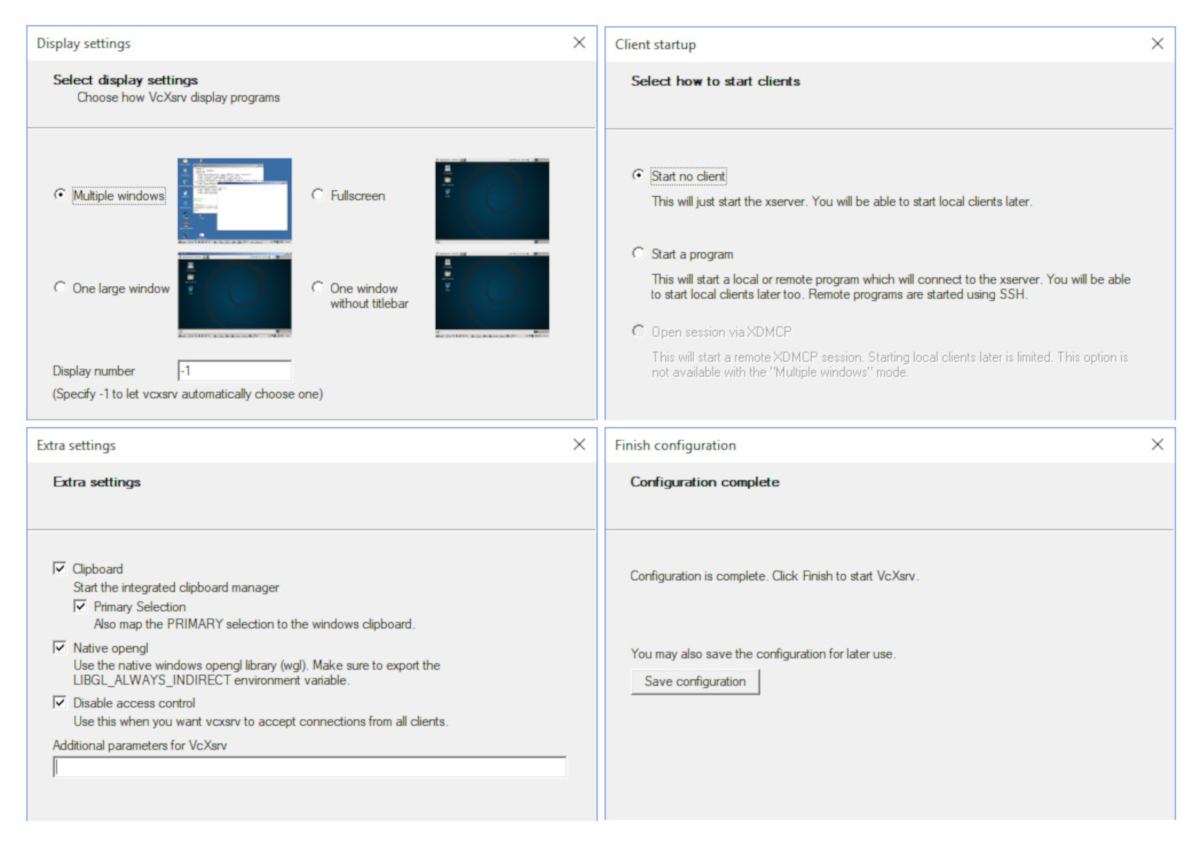
- Windows의 Docker 컨테이너에서 GUI 응용 프로그램을 실행하려면 먼저 VcXSrV(https://sourceforge.net/projects/vcxsrv)를 설치합니다. VcXsrv를 시작할 때 그림 S1에서와같이 설정을 구성합니다.
참고: FLLIT를 시작하기 전에 Docker 및 VcXsrv가 실행되고 있는지 확인합니다. - FLLIT.bat을 두 번 클릭하여 FLLIT을 실행합니다.
참고: 처음으로 실행하는 경우 Docker Hub에서 Docker 이미지를 가져오는 데 시간이 걸릴 수 있습니다.
- 7 및 10 번째 홈 에디션의 경우 다음에서 Docker 도구 상자를 설치하십시오.
- MacOS에 FLLIT 설치
- https://download.docker.com/mac/stable/Docker.dmg 맥 OS에 대 한 도커 데스크톱 다운로드
- 터미널을 열고 다음 명령을 실행하여 socat을 설치하십시오.
양조 설치 socat - 다음을 통해 socat을 시작하십시오.
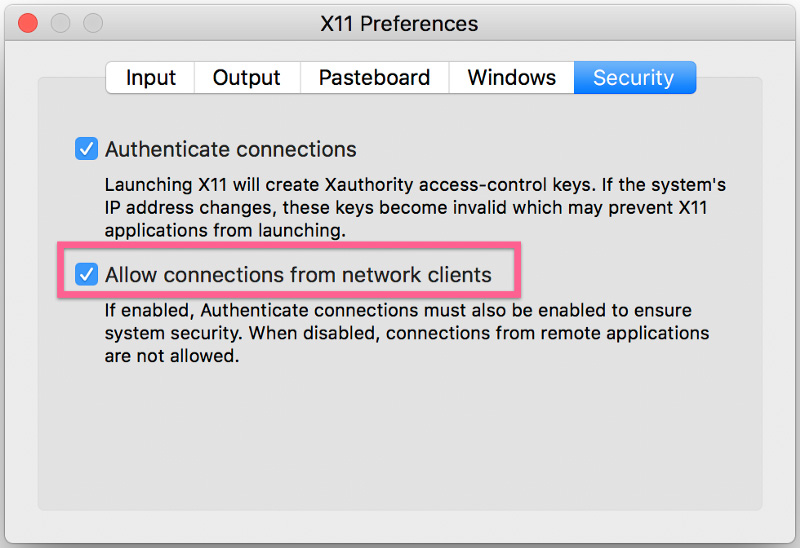
socat TCP-LISTEN:6000, 재사용, 포크 UNIX-클라이언트:\"$DISPLAY\" & disown - XQuartz(https://www.xquartz.org)를 설치하여 MacOS의 Docker 컨테이너에서 GUI 응용 프로그램을 실행할 수 있습니다. 그림 S2에표시된 대로 보안 탭에서 네트워크 클라이언트의 연결 허용을 확인하여 XQuartz를 시작하고 기본 설정을 변경합니다.
참고: FLLIT를 시작하기 전에 Docker, socat 및 XQuartz가 모두 실행되고 있는지 확인합니다. - FLLIT/컴파일된 디렉터리에서 터미널을 열고 다음 명령으로 FLLIT를 실행합니다.
배쉬 FLLIT_Mac.sh
참고: 처음으로 실행하는 경우 Docker Hub에서 Docker 이미지를 가져오는 데 시간이 걸릴 수 있습니다.
5. 자동 다리 추적을위한 FLLIT 실행
- 세분화
- 비디오를 개별 TIFF 파일로 변환하고 FLLIT 데이터 폴더에 복사합니다.
- FLLIT를 실행 (우분투에서, 터미널에서 FLLIT를 엽니 다 마우스 오른쪽 버튼으로 클릭).
- 추적할 비디오의 프레임별 TIFF 이미지가 포함된 폴더를 선택하고 추가 단추를 클릭합니다.
- 팝업 창에서 다리 세분화만 수행하기 위해 0을 선택하거나 다리 세분화를 사용하여 다리 추적을 포함하도록 1을 선택합니다.
- 완료를 클릭하여 선택한 비디오의 세분화 및 추적을 시작합니다.
- 추적
- 추적의 정확성을 확인하고 오류 수정(있는 경우)을 수행하려면 데이터 폴더 선택을클릭합니다. 추적할 폴더를 선택하고 열기를클릭합니다.
- [보기]
참고: 추적된 다리 위치를 볼 때 뷰어 모드가 선택된 상태로 유지되도록 합니다. 그렇지 않으면 이전에 수정한 사항이 지나치게 초과됩니다. - 첫 번째 프레임의 모든 다리에 대한 라벨링 확인
참고: 다리 라벨은 화면의 위치에 따라 배치되기 때문에 플라이가 똑바로 걷는 경우 플라이의 오른쪽은 L1(앞다리), L2(중간 다리), L3(뒷다리) 및 플라이의 왼쪽에 R1(앞다리), R2(중간 다리), R3(뒷다리) 표시로 표시되어Figure 3있습니다. 플라이가 거꾸로 걷는 경우 다리 라벨이 올바르게 비고됩니다. - 다리에 레이블이 잘못 지정되어 수정이 필요한 경우 일시 중지 보기를클릭한 다음 예측 조정(그림 3)을클릭합니다.
- 오른쪽 패널에서 다리를 조정하고 보정이 필요한 다리를 선택합니다.
- 이미지 창에서 이 다리의 올바른 위치를 두 번 클릭한 다음 저장을클릭한 다음 을 종료합니다. 이전 프레임 또는 후속 프레임으로 이동하려면 일시 중지 보기를 클릭한 다음 앞으로 및 뒤로 및 I> 버튼(그림3)을클릭합니다.
- 잘못 추적된 비디오를 수정하려면 비디오의 데이터 폴더를 열어 다시 추적하고 수동으로 추적을 선택합니다.
- 추적 단추를 클릭하면 레이블이 초기로 변경됩니다.
- 예측 조정을 클릭하고 각 다리 팁을 두 번 클릭한 다음 올바른 다리 레이블로 할당하여 다리 레이블을 수정합니다. 저장 및 종료를 클릭합니다.
- 추적을 시작하려면 다시 시작을 클릭합니다.
- 데이터 처리 및 비디오 생성
- 데이터 프로세스를클릭합니다. 팝업 창에서 비디오가 기록된 초당 프레임 수(fps)를 입력합니다(예: 1,000fps).
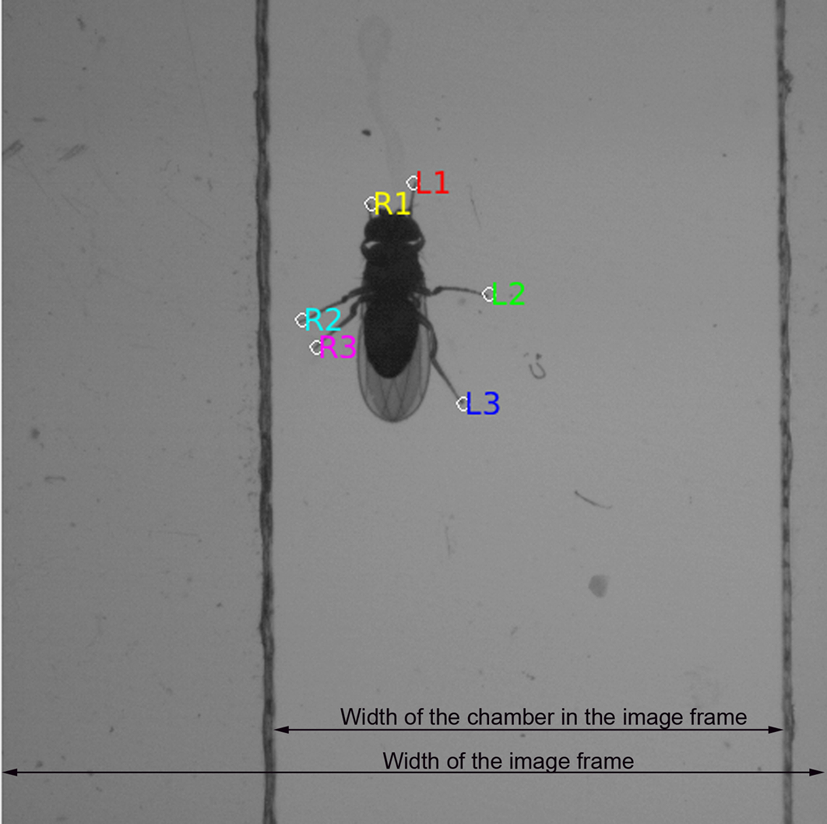
- 다음 방정식을 사용하여 걸음걸이 매개변수를 밀리미터 단위로 측정할 수 있도록 캡처된 비디오의 실제 시야를 계산합니다.

참고: 예를 들어, 실제 챔버 크기가 7 mm인 경우, 이미지 프레임의 폭은 137 mm이고, 컴퓨터 화면상의 이미지 프레임에서 챔버의 폭은 81 mm이고, 시야의 폭은 11.83mm(그림 S3)이다. - 추적 결과를 보려면 결과 폴더 아래의 추적 폴더로 이동합니다.
- 추적된 비행 의 비디오를 생성하려면 비디오 만들기를선택합니다. 비디오는 분석된 원본 비디오 데이터와 동일한 결과 폴더에 저장됩니다.
참고: 비디오의 시작(첫 번째) 및 끝(마지막) 프레임을 선택할 수 있습니다.
- 각 플라이의 바디 길이로 정규화합니다.
참고: 각 플라이의 크기가 약간 다를 수 있으므로 비교를 용이하게 하기 위해 특정 보행 매개변수를 각 비행의 몸길이로 정규화해야 합니다(예: 보폭 길이는 더 큰 파리에서더 길고 작은 파리에서는 더 짧을 수 있음).- 이미지 소프트웨어를 사용하여 각 플라이(일반적으로 첫 번째, 중간 및 마지막 프레임)의 비디오에서 3개의 스틸 이미지를 엽니다.
- 각 이미지 프레임을 800%로 확대하고 밝은 색상(예: 노란색)을 사용하여 중간선의 머리 및 후방 최다 픽셀에 레이블을 지정합니다.
- ImageJ에서 레이블이 지정된 이미지를 엽니다.
- 축척 설정 사용하여 그에 따라 축척입력: 거리 설정(픽셀: 512) 알려진 거리: 5.3.2단계에서 측정된 실제 시야(mm); 길이 단위: mm.
- 표시된 머리와 복부 팁 픽셀 사이에 직선을 그려 바디 길이를 얻습니다.
- 설정 축척을 다시 열어 알려진 거리의 값을 가져오고, 이는 바디 길이mm입니다.
- 3개의 이미지 각각에서 결정된 길이의 평균을 취하여 mm의 평균 신체 크기를 얻었다.
결과
다리 세분화, 추적 및 데이터 처리에 이어 FLLIT은 바디와 각 다리 발톱, 20걸음걸이 매개변수, 5개의 플롯 및 추적된비디오(표 1)의위치에 대한 원시 데이터를 자동으로 생성합니다.
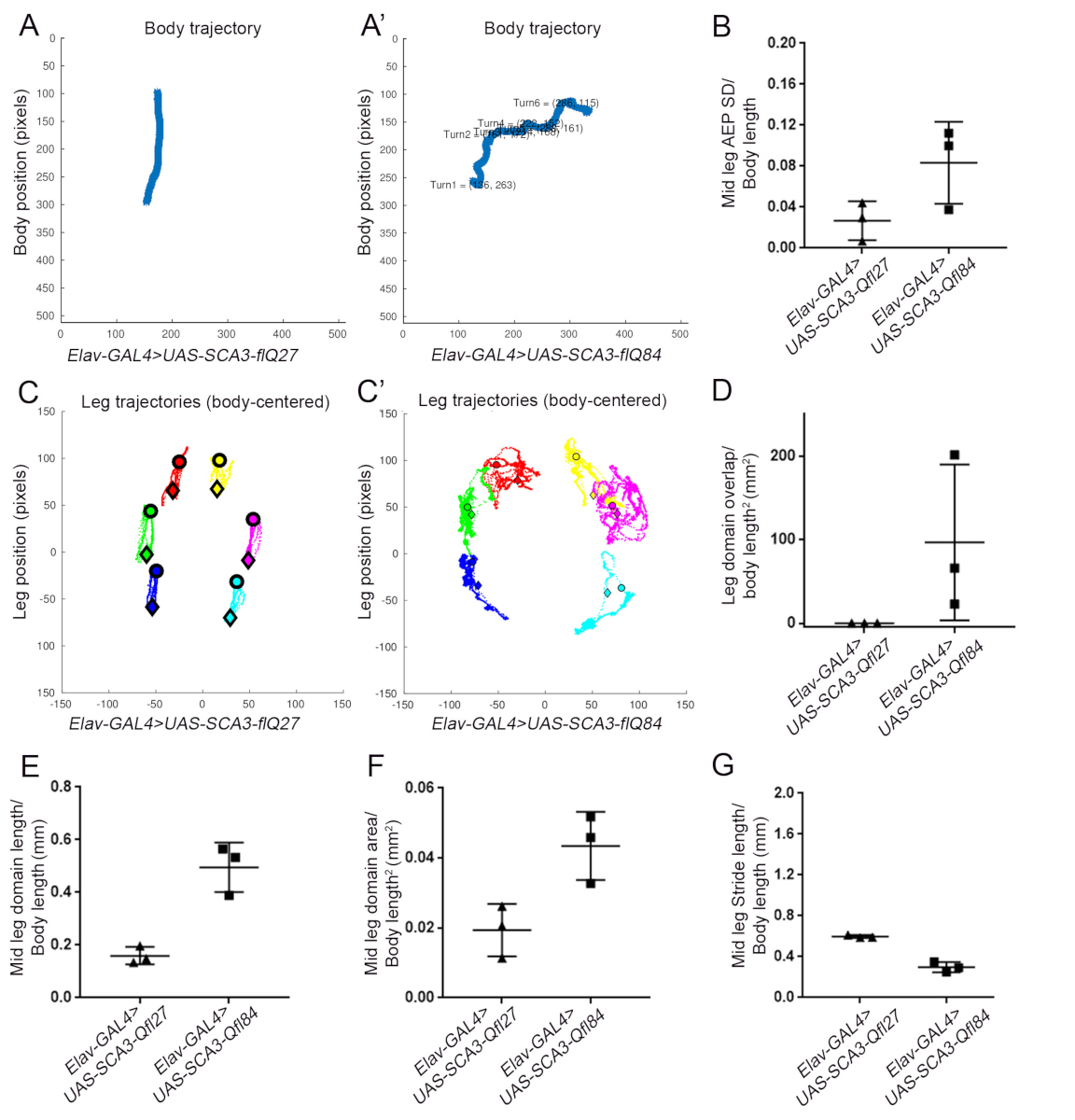
여기서는 Spinocerebellar 운동 실조 3 (SCA3)의 플라이 모델을 사용하여 이러한 분석을 보여줍니다. 범뉴뉴런 드라이버인 Elav-GAL4는 폴리Q 관부에서 27글루타민을 가진 전신 야생형 인간 SCA3(UAS-SCA3-flQ27) 또는 폴리Q 관내 84글루타민을 이용한 전신 돌연변이 인간 SCA3(UAS-SCA3-flQ84)를 구동하는데 사용되었다11. SCA3는 몸 을 베는, 불규칙한 발 배치 및 짧은, 숨막히는 단계12,,13 (표 2)와과세 걸음걸이로 대표된다. 돌연변이 SCA3 파리의 걸음걸이를 특성화하고 인간 환자의 보행과 유사한 걸음걸이를 표시하는지 여부를 조사하기 위해 FLLIT에 의해 생성된 관련 보행 매개변수, 즉 신체 회전 수, 발자국 규칙성, 다리 도메인 중복 및 크기 및 다리 보폭길이(표 2)를분석했습니다.
우리는 SCA3-Q84 파리가 더 많은 회전을 나타냈다 것으로 나타났습니다(그림 4A, A'),낮은 풋 프린트 규칙성에 의해 전시 된 불규칙한 발 배치 (AEP14의확대 표준 편차)(그림 4B) (그림 4C-D), 증가 다리 도메인 오버랩(그림 4C-D),길이 및 면적의 다리 도메인 확대(그림 4E,F), 및 보폭 감소 길이(그림 4E,F).
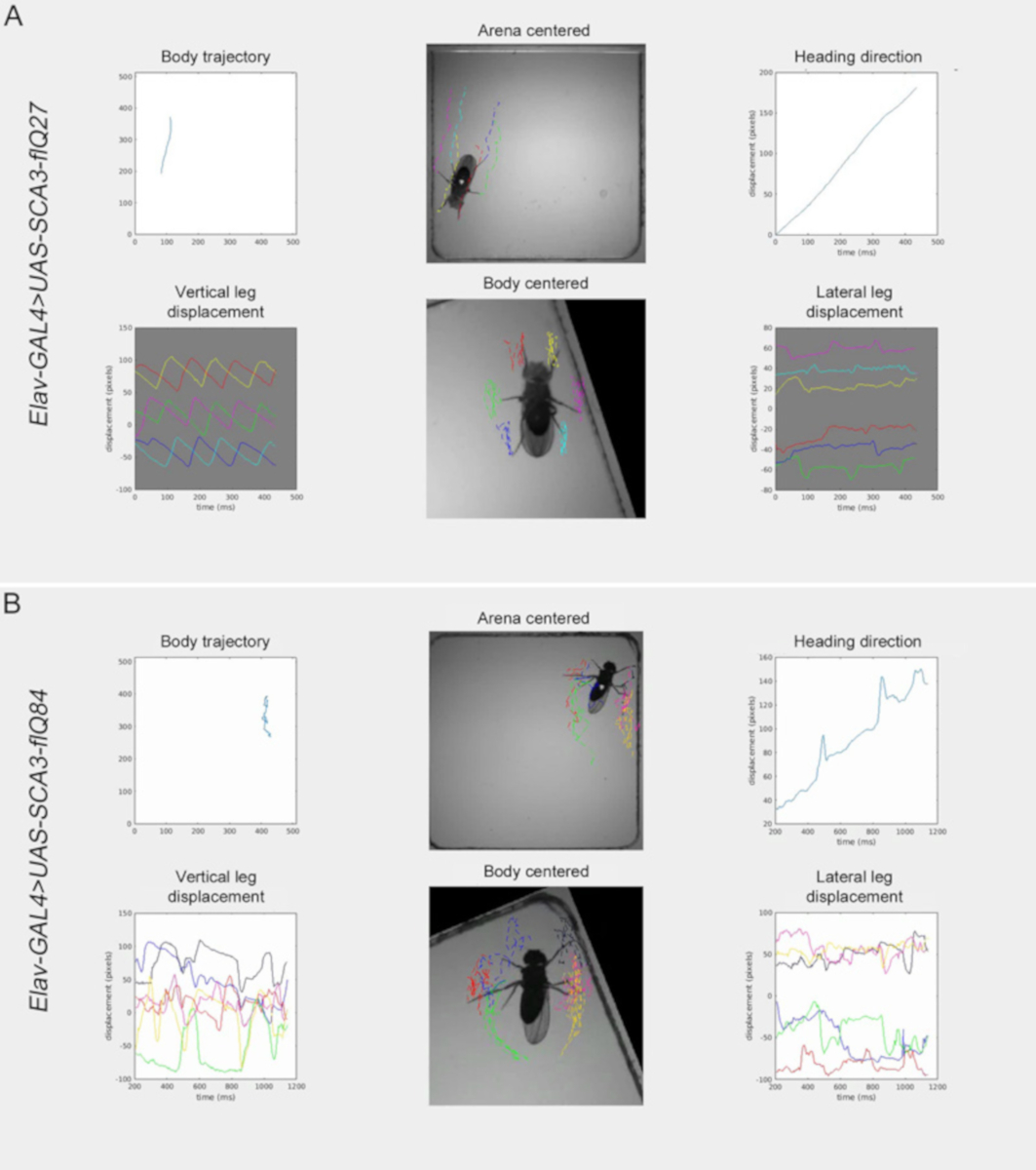
FLLIT은 또한 경기장 중심 및 바디 중심 뷰, 바디 궤적 및 방향 방향, 각 다리의 수직 및 측면 변위에서 추적된 비행 및 다리를 보여주는 비디오를 생성합니다(그림5). 추적된 동영상은 서로 다른 파리의 다리 움직임을 나란히 비교할 수 있습니다. Elav-GAL4> SCA3-flQ27 (비디오 1)및 Elav-GAL4> SCA3-flQ84 (비디오 2)의대표 동영상은 비행에 비해 Elav-GAL4>UAS-SCA3-flQ27 파리 (그림 5A), Elav-GAL4>UAS-SCA3-flQ84 (그림 5A), Elav-GAL4>UAS-SCA3-flQ84 서로 다른 크기의 다리 도메인을 교차, 숨막히는 나타내는, ataxic 걸음걸이.Figure 5AFigure 5B

그림 1. 녹음 스테이션 및 경기장 의 설정. (A)전면 및(B)측 보기에서 녹음합니다. (C)FLLIT 추적을 위한 플라이 레코딩을 만드는 데 사용되는 경기장의 예입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 2: 두 개의 파리를 동시에 기록할 수 있는 듀얼 헤드 카메라를 사용하여 플라이 보행 녹화 중 활성 창보기. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 3: 분할 및 추적 후 버튼 패널과 레이블이 지정된 다리를 보여주는 활성 FLLIT 창입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

도 4: 야생형을 발현하는 파리의 관련 걸음걸이 파라미터에 대한 대표적인 FLLIT 생성 데이터(SCA3-flQ27) 대 돌연변이체(SCA3-flQ84) SCA3. (A)신체 궤적의 회전 수. (B)다리 중피트선 규칙성은 신체 길이로 정규화됩니다. (C-C') 각 다리의 다리 영역을 통과했습니다. (D)다리 사이에 도메인이 겹칩니다. (E)중족 도메인 길이가 체내 길이로 정규화됩니다. (F)중족 도메인 영역이 체내 길이2로정규화되었습니다. (G)다리 중간 보폭이 체감에 정규화 됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 5: 대표적인 FLLIT 생성 비디오의 스냅샷입니다. (A) Elav-GAL4>UAS-SCA3-flQ27 및(B) Elav-GAL4>UAS-SCA3-flQ84 파리. Please click here to view a larger version of this figure.
{kind=link}

비디오 1: 범 뉴런 야생형 인간 전신 SCA3(Elav-GAL4>UAS-SCA3-flQ27)를 표현하는Elav-GAL4>UAS-SCA3-flQ27비행의 대표적인 비디오. 이 비디오를 보려면 여기를 클릭하십시오. (다운로드하려면 마우스 오른쪽 단추로 클릭합니다.)

비디오 2: 범뉴런 돌연변이 체형 의 전체 길이SCA3(Elav-GAL4>UAS-SCA3-flQ84)를표현하는 비행의 대표적인 비디오. 이 비디오를 보려면 여기를 클릭하십시오. (다운로드하려면 마우스 오른쪽 단추로 클릭합니다.)

추가 그림 1: VcXSrv에 대한 구성입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

추가 그림 2: Xquartz에 대한 구성. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

추가 그림 3: 시야 계산에 필요한 치수로 레이블이 지정된 이미지입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
| 범주 | 매개 변수 | 설명 | 파일/플롯(해당하는 경우) |
| 원시 데이터 | 바디 위치 | 각 프레임의 바디 중심의 위치 좌표 | CoM.csv의 처음 두 열 |
| 차체 탄도 | 도의 바디 축 회전 각도(y축에 상대) | CoM.csv의 세 번째 열 | |
| 아레나 중심의 다리 발톱 위치 | 아레나 좌표를 기반으로 각 프레임의 각 다리 발톱의 위치 좌표 | 궤적.csv | |
| 바디 센터 레그 클로 위치 | 각 프레임의 각 다리 발톱의 위치 좌표 아레나 좌표를 기반으로 | norm_trajectory.csv | |
| 바디 모션 | 본체 길이(mm) | 각 프레임에서 추정된 샘플 동물의 길이(머리에 가장 많은 위치가 후방까지 날개에 위치) | 바디길이.csv |
| 순간 체속 (mm/s) | 샘플 동물의 신체의 순간 속도 (중심) | 바디벨로시티.csv; 바디벨로시티.pdf | |
| 신체의 터닝 포인트 궤적 | 터닝 포인트를 찾기 위해 더글 라스파푸커를 사용하여 궤적을 조각선형 곡선으로 줄입니다. 두 이웃 사이의 각도 > 50 도프와 관련된 것으로 식별되는 선회 이벤트가 다음 알고리즘 단순화된 궤적을 구성하는 선형 세그먼트 | 바디 궤도.pdf | |
| 개별 보폭 매개변수 | 보폭 지속 시간(ms) | 보폭 이벤트의 기간 | 스트라이드매개 변수.csv |
| 보폭 기간(ms) | 한 보폭 이벤트에서 다음 보폭 이벤트까지의 지속 시간 | ||
| 보폭 변위(mm) | 보폭 이벤트 중 다리 발톱변위 | ||
| 보폭 적용 경로(mm) | 보폭 이벤트 중 다리 발톱으로 덮인 총 경로 | ||
| 전방 극단적 인 위치 (mm) | 보폭 이벤트가 끝날 때 다리 발톱의 계단참 위치(본체에 상대적) | ||
| 후방 극단적 인 위치 (mm) | 보폭 이벤트 시작 시 다리 발톱의 이륙 위치(본체별) | ||
| 보폭 진폭(mm) | 보폭 이벤트의 모션 방향을 따라 변위 | ||
| 스탠스 선형성(mm) | 해당 전방(20ms 간격)을 통해 스무딩된 곡선으로부터보폭의 편차로 정의 보폭의 후방 극단적 인 위치 | ||
| 보폭 스트레치(mm) | 보폭 이벤트 중간에 있는 바디 센터에서 다리 발톱 위치의 거리 | ||
| 다리 동작 | 레그 속도(mm/s) | 각 다리의 순간 속도 | 레그스피드.csv; 걸음걸이.pdf |
| 걸음걸이 지수 | 이것은 운동 중에 (6다리) 샘플 동물에 의해 전시된 보행 조정의 유형을 측정한다. 걸음걸이 인덱스 1은 삼각대 걸음걸이에 해당하며_1은 테트라포드 보행에 해당하며 0은 비표준 보행을 구성합니다. 구현에서 걸음걸이 지수는 120 ms 창을 통해 이동 평균에 의해 얻어진다 | 걸음걸이 인덱스.csv; 걸음걸이 지수.pdf | |
| 이동 백분율 | 다리가 움직이는 시간의 백분율 | 레그파라미터.csv | |
| 평균 보폭(ms) | 한 보폭 이벤트에서 다음 보폭 이벤트까지의 평균 지속 시간 | 레그파라미터.csv | |
| 발자국 규칙성(mm) | 후방의 표준 편차로 측정및 | 레그파라미터.csv | |
| 다리의 전방 극단적 인 위치 | |||
| 다리 궤적 도메인 영역 (mm2) | 레퍼런스 프레임의 전체 다리 궤적을 포함하는 최소 볼록 선체 영역 | 레그파라미터.csv; 레그도메인.pdf | |
| 길이와 폭은 레그 탄도 도메인(mm) | 주요 (도메인 길이) 및 마이너에 발톱 위치의 최대 예상 거리를 통해 얻은 (도메인 너비) 주 축 | 레그파라미터.csv | |
| 다리 도메인 교차/겹침 (mm2) | 가능한 각 교차/겹침 | 레그도메인오버랩.csv | |
| 스탠스 폭(mm) | 왼쪽 다리와 중간 다리의 AEP와 PEP 사이의 평균 거리 | 스탠스폭.csv |
표 1: FLLIT에 의해 생성된 걸음걸이 매개변수.
| 걸음걸이 기능 | ||||
| 척추 주의자 운동 실조의 걸음걸이 기능 3 (SCA3) | 기울고 | 불규칙한 발 배치 및 다리 교차 | 숨막히는 걸음 | 짧은 보폭 |
| 측정 파라미터 | 바디 턴 이벤트 수 | 발자국 규칙성 | 다리 도메인의 크기, 도메인 중복 정도 | 보폭 길이 |
| FLLIT 파일 | 바디 궤도.pdf | 레그파라미터.csv | 레그도메인오버랩.csv | 스트라이드매개 변수.csv |
표 2: 해당 FLLIT 파라미터 및 출력 파일을 가진 인간 환자에서 특징적인 SCA3 보행 특징을 보여주는 표.
토론
이 원고에서는 자동화 된 기계 학습 프로그램 인 FLLIT1을사용하여 자유롭게 걷는 Drosophila에서걸음걸이를 분석하는 단계를 자세히 설명합니다. 추적 및 데이터 분석 후 FLLIT은 신체 및 다리 발톱의 위치 정보에 대한 원시 데이터를 자동으로 생성하여 20개의 신체 및 걸음걸이 기능과 추적된 비행 비디오를 생성하여 걸음걸이 시각화를 가능하게 합니다.
현재, 1, ,12,3,34,,4,14,15,16의다리 운동 추적을 위한 여러 가지 방법이 있으며, 실험의 목표에 따라 다양한 옵션을 연구자들에게 제공하고 있다. 이들 중 일부는 매우 정확하지만 검출 표면4,,14와만 발톱 접촉점을보고 발 인쇄 기반 접근 방식입니다. 한편, 최근 딥 러닝 접근 방식2,,3,,16은 매우 다재다능하여 모든 동물의 다리 관절 및 기타 신체 부위를 추적해야 하는 행동을 분석할 수 있으며, 알고리즘이 먼저 사용자 에추가 추가된 데이터 집합으로 학습되어야 한다는 경고와 함께. 세 번째 유형의 접근 법은 형태 또는1이미지 대비 기반 방법1,15,,17을 사용하여 각 다리의 윤곽을 찾아 발톱 위치를 식별합니다. 일반적으로 이러한 방법은 다리가 교차하는 동작(예: 그루밍 중)을 제대로 처리하지 않습니다. FLLIT은 형태학적 매개변수를 사용하여 다리 세분화를 위한 부스팅 알고리즘을 학습하는 두 번째 및 세 번째 접근 방식을 결합합니다. 이를 통해 FLLIT은 사용자 별표의 까다로운 작업을 우회하여 학습 데이터 집합을 생성하는 동시에 기계 학습을 사용하여 정확도를 향상시킬 수 있습니다. FLLIT에 대한 향후 개선 사항은 다리가 교차하는 인스턴스를 처리하여 보다 복잡한 동작을 분석할 수 있도록 해야 합니다.
FLLIT은 조명, 레코딩 해상도 및 프레임 속도1의약간의 변화에 견고합니다. 그러나 녹화된 비디오의 프레임 속도는 250fps 미만으로 떨어지지 않아야 하며 FLLIT은 1000fps로 녹화된 비디오에 대해 최적으로 실행됩니다. 이미지에 모션 블러가 있는 경우, 사람의 개그 위치를 식별하기 어려운 경우 FLLIT은 해당 프레임에서 다리 팁을 정확하게 식별할 수 없습니다. 이에 비추어 볼 때, 카메라는 다리 끝에 날카롭게 초점을 맞추어야 합니다. 세분화 아티팩트를 방지하기 위해 경기장을 철저히 청소해야 하며 녹화 중에 이동해서는 안 됩니다. 정확한 배경 빼기 및 깔끔한 세분화를 위해 플라이는 일시 중지하지 않고 기록 중에 하나 이상의 바디 길이를 이동해야 합니다. 자동 세그미테이션 및 모든 다리의 라벨을 추적 한 후 확인해야합니다. 플라이 보행이 잘못 추적되지 않으면 수동으로 추적 시작 옵션(5.2.7 – 5.2.10 단계)을 사용하여 파일을 수동으로 다시 추적해야 합니다.
신경 퇴행성 질환과 운동 장애는 우리의 노화 사회에서 점점 더 널리 퍼져 있습니다. 신경 변성의 비행 모형은 질병 병리생리학의 분자 그리고 세포 양상에 관하여 진보가 이루어진 동안 2 년 이상 동안 공부되었습니다. 그러나, 질병의 특정 행동 결과는 기술적으로 평가하기 어려웠습니다. 예를 들어, 비행 중의 떨림 움직임에 대한 보고가18,,19로이루어진 반면, 이들은 최근1일까지정량적으로 연구되지 않았다. 등반 분석은 유용하고 양적, 아직 상대적으로 거친 측정6되었습니다. 이 기술적 적자는 마찬가지로 다른 동물 모델에서 고해상도 운동 분석을 방해하고있다. 행동 분석을 위한 새로운 공구의 출현은, 그러므로, 신경 근육 질병의 분자 및 세포 기계장치가 동물 모형에 있는 특정 행동 결과로 이끌어 내는 방법을 연구하는 연구원을 가능하게 하기 위하여 운동 무질서의 필드를 젊어지게 하는 것을 약속했습니다. 본 논문과 전작1에서는SCA3의 플라이 모델이 초운동적 무택 걸음걸이를 나타내는 FLLIT을 사용하는 것으로 나타났으며, PD 플라이 모델은 저운동성 강체 걸음걸이를 나타내며, 각 인간 질병의 운동 특징을 재차재현합니다 1. 걸음걸이 분석은 또한 특정 운동 역기능의 근본적인 명백한 신경 인구를 확인하는 가능하게 했습니다. 앞으로, 상세한 운동 분석, 비행에서 사용할 수있는 강력한 이미징 및 기능 도구와 결합, 우리는 회로 메커니즘에 대한 신경 퇴행성 질환의 우리의 이해를 조명, 운동 기능 장애의 메커니즘에 대한 새로운 통찰력을 얻을 수 있습니다.
FLLIT은 이전에 거미 다리의 움직임을 추적하기위한 매우 정확한 것으로 입증 된 바와 같이, 다른 작은 절지 동물에서 보행을 연구하기 위해 널리 적용되어야한다1. 우리는 병원성 걸음걸이와 그 기본 회로를 정량화하기위한 상세한 운동 자형교의 사용에 초점을 맞추고 있지만, 운동 추적의 발전은 이미 혁명을 일으켰으며, 정상적인 보행 조정 및 걸음걸이및 그 기본 회로, 특히 진화 나무의 무수한 다른 가지에 대한 이해에 지속적인 영향을 미칠 것입니다.
공개
저자는 공개 할 것이 없다.
감사의 말
저자는 기술 지원을 위해 무미타 채터지와 앨리스 리우, 그리고 블루밍턴 드로소필라 스톡 센터 (인디애나, 미국)가이 작품에 사용되는 드로 소필라 균주를 사용할 수 있도록 감사드립니다. 이 작품은 분자 및 세포 생물학 연구소에 의해 지원되었다, 싱가포르; 생물 정보학 연구소, 싱가포르; 과학기술연구공동협의회 조직(SA 및 LC에 15302FG149 보조금) 임상 연구 주력 프로그램 (파킨슨 병) 보건부의 국립 의학 연구위원회 (SA에 부여 번호 NMRC / TCR / 013-NNI / 2014), 앨버타 대학 (LC에 스타트 업 보조금), 캐나다의 자연 과학 및 공학 연구위원회 (NSERC) 발견 보조금 (보조금 번호 RGPIN-2019-045).
자료
| Name | Company | Catalog Number | Comments |
| Acrylic Sheets | Dama | 1.6 mm thickness, Clear sheets | Singapore, Singapore |
| Clear Glass slides | Biomedia | BMH 880101 | Singapore, Singapore |
| High speed camera | Photron | Fastcam MC2.1 | Tokyo, Japan. A shutter speed of 1 msec or faster is ideal to reduce motion blur of captured images |
| Infra Red LED | Any - Generic from hardware store | 940nm Infrared Light Board | Singapore, Singapore |
| Kimwipe | Kimberly Clark | 34155-01LS | Irving, Texas, USA |
참고문헌
- Wu, S., et al. Fully automated leg tracking of Drosophila neurodegeneration models reveals distinct conserved movement signatures. PLoS Biology. 17 (6), 3000346 (2019).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 19, 1281-1289 (2018).
- Pereira, T. D., et al. Fast animal pose estimation using deep neural networks. Nature Methods. 16 (1), 117-125 (2019).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Lu, B., Vogel, H. Drosophila models of neurodegenerative diseases. Annual Reviews in Pathology. 4, 315-342 (2009).
- McGurk, L., Berson, A., Bonini, N. M. Drosophila as an In Vivo Model for Human Neurodegenerative Disease. Genetics. 201 (2), 377-402 (2015).
- Dionne, H., Hibbard, K., Cavallaro, A., Kao, J. -. C., Rubin, G. M. Genetic reagents for making split-GAL4 lines in Drosophila. bioRxiv. , (2017).
- Cande, J., et al. Optogenetic dissection of descending behavioral control in Drosophila. eLife. 7, (2018).
- Nern, A., Pfeiffer, B. D., Rubin, G. M. Optimized tools for multicolor stochastic labeling reveal diverse stereotyped cell arrangements in the fly visual system. Proceedings of the National Academy of Sciences of the United States of America. 112 (22), 2967-2976 (2015).
- Xie, T., et al. A Genetic Toolkit for Dissecting Dopamine Circuit Function in Drosophila. Cell Reports. 23 (2), 652-665 (2018).
- Warrick, J. M., et al. Ataxin-3 suppresses polyglutamine neurodegeneration in Drosophila by a ubiquitin-associated mechanism. Molecular Cell. 18 (1), 37-48 (2005).
- Ebersbach, G., et al. Comparative analysis of gait in Parkinson's disease, cerebellar ataxia and subcortical arteriosclerotic encephalopathy. Brain. 122 (7), 1349-1355 (1999).
- Stolze, H., et al. Typical features of cerebellar ataxic gait. Journal of Neurology, Neurosurgery and Psychiatry. 73 (3), 310-312 (2002).
- Mendes, C. S., Bartos, I., Akay, T., Marka, S., Mann, R. S. Quantification of gait parameters in freely walking wild type and sensory deprived Drosophila melanogaster. eLife. 2, 00231 (2013).
- DeAngelis, B. D., Zavatone-Veth, J. A., Clark, D. A. The manifold structure of limb coordination in walking Drosophila. eLife. 8, (2019).
- Gunel, S., et al. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. eLife. 8, (2019).
- Isakov, A., et al. Recovery of locomotion after injury in Drosophila melanogaster depends on proprioception. The Journal of Experimental Biology. 219, 1760-1771 (2016).
- Aw, S. S., Lim, I. K. H., Tang, M. X. M., Cohen, S. M. A Glio-Protective Role of mir-263a by Tuning Sensitivity to Glutamate. Cell Reports. 19 (9), 1783-1793 (2017).
- Eberl, D. F., Duyk, G. M., Perrimon, N. A genetic screen for mutations that disrupt an auditory response in Drosophila melanogaster. Proceedings of the National Academy of Sciences of the United States of America. 94 (26), 14837-14842 (1997).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유