
Method Article
מעקב אוטומטי לחלוטין ברגל באופן חופשי חרקים נעים באמצעות לימוד הרגל למידה פילוח ומעקב (FLLIT)
In This Article
Summary
אנו מתארים פרוטוקולים מפורטים לשימוש ב-FLLIT, שיטת למידה מלאה אוטומטית של מכונה למעקב אחר תנועות של הרגליים באמצעות הזזת דרוסופילה מלאנוגסטר וחרקים אחרים. ניתן להשתמש בפרוטוקולים אלה כדי לכמת את המהלכים הליכה עדינים בהליכה בתנועות מסוג פראי זבובים, מוטציה זבובים ומודלים לטוס של ניוון נוירוסטיות.
Abstract
דגם Drosophila ילה היה רב ערך לחקר התפקוד הנוירולוגי ולהבנת המנגנונים המולקולריים והסלולאריים הטמונים בחוסר ניוון נוירולוגי. בעוד טכניקות לטוס לטיפול ולימוד של קבוצות מערכות נוירואליות גדלו יותר ויותר מתוחכמים, העושר של פנוטיפים התנהגותיים כתוצאה לא נתפסו בפרט דומה. כדי להיות מסוגל ללמוד תנועות הרגל עדין לטוס להשוואה בין מוטציות דורש את היכולת למדוד באופן אוטומטי ולכמת תנועות הרגל במהירות גבוהה ומהירה. מכאן, פיתחנו אלגוריתם לימוד מכונה עבור מעקב ציפורניים אוטומטי של הרגל ב זבובים הליכה בחופשיות, תכונות למידה מבוססי פילוח הגפיים מעקב (FLLIT). בניגוד לשיטות הלמידה העמוקות ביותר, FLLIT היא אוטומטית לחלוטין ויוצרת ערכות הדרכה משלו ללא צורך ביאור משתמש, באמצעות פרמטרים מורפולוגיים המובנה באלגוריתם הלמידה. מאמר זה מתאר פרוטוקול עומק לביצוע ניתוח הילוך באמצעות FLLIT. זה מפרט את ההליכים עבור הגדרת המצלמה, בניית ארנה, הקלטת וידאו, פילוח רגל ומעקב ציפורניים הרגל. זה גם נותן סקירה של הנתונים המיוצרים על ידי FLLIT, אשר כולל מיקומים גולמיים מסומנים הגוף והרגל בכל מסגרת וידאו, 20 הילוך, פרמטרים 5 מגרשים וידאו מסומנים. כדי להדגים את השימוש FLLIT, אנו לכמת פרמטרים רלוונטיים הילוך החולה במודל זבוב של האטקסיה של Spino, בלבלר שלוש.
Introduction
בעשורים האחרונים, מחלות ניווניות והפרעות תנועה גדלו שכיחה יותר באוכלוסיות ההזדקנות שלנו. למרות ההבנה שלנו של מחלות ניווניות רבות התקדמה ברמה המולקולרית והתאית, התכונות הבסיסיות של מחלת המעגלים העצביים המושפעים מושפעים להישאר מובנים בצורה גרועה. לאחרונה פיתח כלי מעקב התנהגותי1,2,3,4 כעת לאפשר לנו ללמוד חריגות תנועה במודלים למחלות בעלי חיים על מנת לזהות מולקולרית, הסלולר והמעגל הבסיסי המחלה הבסיסית.
מסלולים מולקולריים המעורבים במחלות ניווניות רבות נשמרים בזבוב הפירות מלאנוגסטר, ומודלים של מחלת דרוזוהילה סייעו להבהיר מנגנונים יסודיים בבסיס נוירוניוון5,6. לאחרונה הראינו כי מודלים לטוס של מחלת פרקינסון (PD) ו SpinoSCA3 Bellar האטאקסיה 3 () התערוכה ברורה, שמרו חתימות הליכה הדומות לאלה של מחלות האדם המתאימות1, הוכחת כי המודל לעוף ניתן להשתמש כדי להבין מנגנונים מסוימים תפקוד התנועה בהפרעות ספציפיות התנועה. מארסנל עשיר הגוברת ללא הרף של כלים במודל לטוס לטיפול ממוקד ויזואליזציה של נוירונים ב הגן היחיד ברמה אחת תא7,8,9,10 עושה לטוס מודל אידיאלי אחד כדי לחקור את היחסים בין מסלולים המחלה, המעגלים העצביים התנהגותית פנוטימית התנהגותיים ב vivo. כדי לאפשר מדויק, אוטומטי הילוך ניתוח הליכה, פיתחנו לאחרונה שיטת למידה מחשב, F הספרותלהרוויח מבוססי מגה- בתים מבוסס ושרוט(fllit)1.
FLLIT מורכב אלגוריתם מרובה אוטומטי באופן מלא, כי הראשון מפלחים את הפיקסלים ברגל, אשר משמשים לאחר מכן כדי לאתר ולעקוב אחר ציפורני הרגל המתאימים. Fllit מעסיקה אלגוריתם האצת לפילוח, בניגוד לאלגוריתמים למידה עמוקה המשמש בעבודה האחרונה2,3. יש כמה קווי דמיון עם רשתות עצביות convolutional זה עבור שתי המסגרות, החילוץ תכונה נעשית באופן אוטומטי דרך למידה convolutional גרעינים. הצעד הראשון ב-FLLIT כרוך בשימוש בפעולות מורפולוגיות (קצה ושלד) כדי ליצור באופן אוטומטי חיובי (פיקסלים על הרגליים) ושלילי (רקע או פיקסלים על גוף הזבוב) בדגימות אימון עם ביטחון גבוה. מכאן, FLLIT היא אוטומטית לחלוטין ואינו מחייב משתמשים מסומן דגימות הדרכה. באמצעות דגימות ההדרכה הנ ל, מסווג מאומן לאחר מכן במסגרת אלגוריתם הגברת. הרכב של מסווג חלש למדו בצורה איטרזית, עם כל אחד מורכב מערכת של גרעינים convolutional להפקת תכונה עץ החלטה. המסווג למדו הסופי משמש לאחר מכן לפילוח רגל והוא מסוגל להבחין טוב יותר אזורים קשים/דגימות קשות יותר מאשר פעולות מורפולוגיות, הפקת פילוח כולל הרבה יותר מדויק עבור מעקב1. מתוך הרגליים מקוטע, אנו לאתר את הטיפים ולעקוב אחריהם באמצעות האלגוריתם ההונגרי: על ידי התאמת עצות על פני מסגרות כגון סכום המרחק שהועבר על ידי כל קצה ממוזער. FLLIT יכול להתמודד עם מקרים סגר על ידי זכירת המיקום האחרון שנראה (בתוך לטוס קואורדינטות ממורכז) כך טיפ רגל הוא התאושש ברגע שהוא כבר לא תחת חסימה.
בעבר הראינו כי FLLIT יכול באופן אוטומטי ומדויק לעקוב אחר תנועות הרגל ולנתח הילוך בלתי מסומן, נע בחופשיות לטוס או עכביש מתוך וידאו במהירות גבוהה1; לפיכך, על FLLIT להיות מתאים באופן כללי עבור מעקב הרגל המרגליות. על-ידי חילוץ ערכות אימון למידה ממוחשבת באמצעות פרמטרים מורפולוגיים, FLLIT מרכבות באופן אוטומטי לפלח ולעקוב אחר רגלי החרק ללא צורך ביאור ידני מפרך, אשר נדרש עבור שיטות למידה מעמיקה ביותר. FLLIT מכאן אוטומטית לחלוטין. לאחר פילוח הרגל ומעקב, FLLIT מייצרת באופן אוטומטי תנוחות raw הגוף והרגל מסומנים בכל מסגרת וידאו, 20 הליכה פרמטרים, 5 מגרשים וידאו מסומנים עבור ניתוח הילוך ויזואליזציה של תנועות הליכה. פרוטוקול זה מספק מדריך צעד-אחר-צעד לשימוש ב-FLLIT.
Protocol
1. הגדרת מערכת
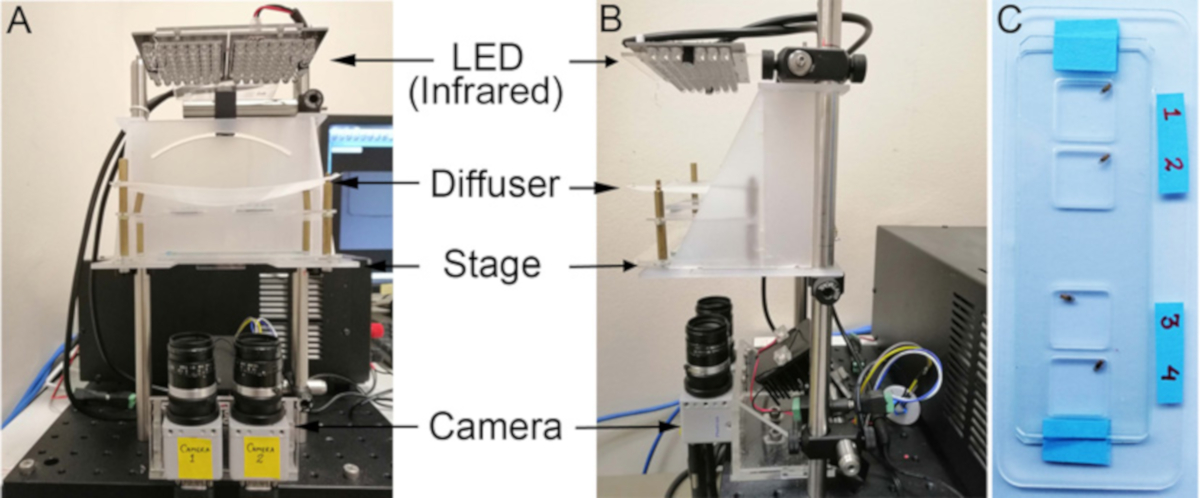
- ודא שלתחנת ההקלטה יש מצלמה במהירות גבוהה ושלב מעליו להחזיק בחדר הזירה (איור 1). להתאים את המצלמה להקליט במינימום של 250 מסגרות לשנייה (fps), עם מהירות תריס מהירה בהתאם (במקרה זה, ההקלטה מבוצעת ב 1000 fps עם מהירות תריס של 1 ms).
הערה: בדוק שהווידאו מתאים למעקב על-ידי כך שתבטיח שקיים טשטוש תנועה מינימלי או לא של הזזת הרגליים בכל המסגרות. אם הרגל נע הוא כל כך מטושטש כי ביאור אדם לא יכול לעקוב אחר זה, אז מהירות ההקלטה המצלמה ו/או מהירות התריס חייב להיות מוגבר. - הצב את נוריות ה-LED באינפרא-אדום בחלק העליון של השלב עם מפזר (גיליון שקוף) בין המצלמה לדגימה (איור 1, B).
- הפוך את תא ההקלטה על ידי גזירה של 1.6 מ"מ גיליון אקרילי עבה. בניסוי זה, השתמש בשדה תצוגה של 11 מ"מ x 11 מ"מ. מניחים את החדר בין שתי שקופיות זכוכית (איור 1C).
2. הכנת זבובים להקלטה
- להעביר את הזבובים להיות מוקלט לתוך בקבוקון מזון חדש 24 שעות לפני ההקלטה.
הערה: אין להשתמש ב-CO2 (שבדרך כלל משתמשים בה כדי לממש את הזבובים על הקולקציה הראשונה) על הזבובים פחות מ -24 שעות לפני ההקלטה. - כ 40 דקות לפני ההקלטה, להעביר את הזבובים לתוך מבחנות ריקות לשמור על קרח עבור 5-7 דקות.
- בינתיים, נגב את הזירה ונקה מגלשות זכוכית עם מים ומגבונים.
הערה: אין להשתמש באתנול כדי לנקות את התאים ואת השקופיות. - . הכן את תא ההקלטה התקן את אחת מהשקופיות הזכוכית המיקרוסקופית מתחת לחדר עם קלטת.
- כאשר הזבובים מורדם על הקרח, להעביר זבוב אחד בכל תא באמצעות מברשת נקייה.
הערה: ניתן להשתמש הן בזבובים זכרים והן בנשים בכיוונון זה, ובמידת האפשר יש לנתח זבובים של שני המינים כדי למנוע הטיה ספציפית למין. - אבטחו את התא עם שקופית זכוכית מיקרוסקופית אחרת עם סרט (איור 1C).
- שמרו את הזבובים הצ בטמפרטורת החדר עבור 15-20 דקות עבור ההסתגלות.
3. הדור של קטעי וידאו עבור ניתוח FLLIT
הערה: שלב זה הוא ספציפי למצלמת הווידיאו שבשימוש. במקרה זה, נעשה שימוש במצלמת וידאו הזמינה באופן מסחרי (ראה טבלת חומרים).
- . תדליק את מקור הכוח המתן לנורית LED ירוקה לאספקת החשמל ולנורית הכתום עבור חיבור ממשק ה-ethernet לייצוב. הפעל את החשמל עבור נורית ה-אינפרא-אדום. ודא שהמתח נשאר ב-12.5 V.
- פתח את יישום המציג במערכת המחשב המחוברת.
- שנה את קצב מסגרת ההקלטה ל-1000 fps. הגדר את מהירות התריס ל 1/1000 s (1 אלפיות הראשונה).
- למקם את התא עם זבוב על זירת ההקלטה ולבחור את כפתור חי . ודא שהמצלמה מתמקדת בקצות הרגל כאשר הזבוב מתהלך זקוף על רצפת החדר; עצות הרגל צריך להיות בפוקוס חדה.
- לחץ על רשומה (איור 2).
- הקלט את המהלכים לטוס, להבטיח כי:
הזבוב הלך במסלול ישר יחסית מבלי לגעת בקצה הזירה.
הזבוב הלך לפחות שלושה צעדים לרגל.
הזבוב אינו משתהה במהלך ההליכה.
המרחק ההליכה הוא שווה ערך לאורך גוף אחד לפחות.
הערה: לאחר שהרקע מופחתים הוא קריטי לפילוח מדויק. אלגוריתם החיסור של הרקע האוטומטי המועסקים על-ידי FLLIT דורש שזבוב התמונה יזוז לפחות אורך גוף אחד במרחק. - לחץ על הלחצן ' בצע ' כדי להפסיק את ההקלטה (איור 2).
- חתוך את הוידאו כדי להבטיח שההקלטה כוללת רק הליכה ישירה של הזבוב (כפי שמתואר בשלב 3.6).
- לחץ על שמור (איור 2). שמור את הקבצים בתבנית '. mraw ' או '. tiff ' בתיקיות המתאימות.
הערה: התבנית '. mraw ' מעניקה גמישות רבה יותר לשינוי שם הקובץ (אם נדרש) ולאחסון של סרטי וידאו לעומת תבנית קובץ '. tiff '.
4. התקנת תוכנית FLLIT
הערה: ניתן למצוא הוראות עדכניות ב: https://github.com/BII-wushuang/FLLIT/blob/master/Compiled/Readme.pdf
- הורד FLLIT בכל מערכת הפעלה
- הורד FLLIT מן הקישור Github הבא: https://github.com/BII-wushuang/FLLIT/archive/master.zip. חלץ את תוכנו של קובץ ה-zip.
- הורד ערכות נתונים לדוגמה מהקישור הבא של Google Drive: https://bit.ly/2EibvNY. יצירת נתוני תיקיה תחת הקובץ fllit-master/הידור ומיקום תיקיות של ערכת נתונים בספריה זו.
- התקנת FLLIT באובונטו
- נווט אל הספריה FLIT/מהודרת.
- לחץ לחיצה ימנית ובחר באפשרות פתח בתוך התורl.
- הנפק את הפקודה הבאה כדי להוריד ולהתקין את ספריות זמן הריצה של MATLAB ל$HOME/MCR:
bash MCR_2016a. sh - לאחר השלמת ההתקנה של ספריות זמן הריצה של MATLAB, הנפק את הפקודה הבאה כדי להבטיח שזכויות ההפעלה יהיו מסוימות ל-FLLIT:
chmod + x FLLIT - פתח מסוף בספריה FLIT/הידור והנפק את הפקודה הבאה לביצוע FLLIT:
bash run_FLLIT. sh $HOME/MCR/v901
- התקנת FLLIT ב-Windows
- עבור 7 ו-10th הבית מהדורה, להתקין את ארגז הכלים Docker ב:
(https://github.com/docker/toolbox/releases/download/v19.03.1/DockerToolbox-19.03.1.exe). - עבור Windows 10 Pro או מהדורת הארגון, התקן את שולחן העבודה Docker עבור Windows ב: (https://download.docker.com/win/stable/Docker\%20Desktop\%20Installer.exe).
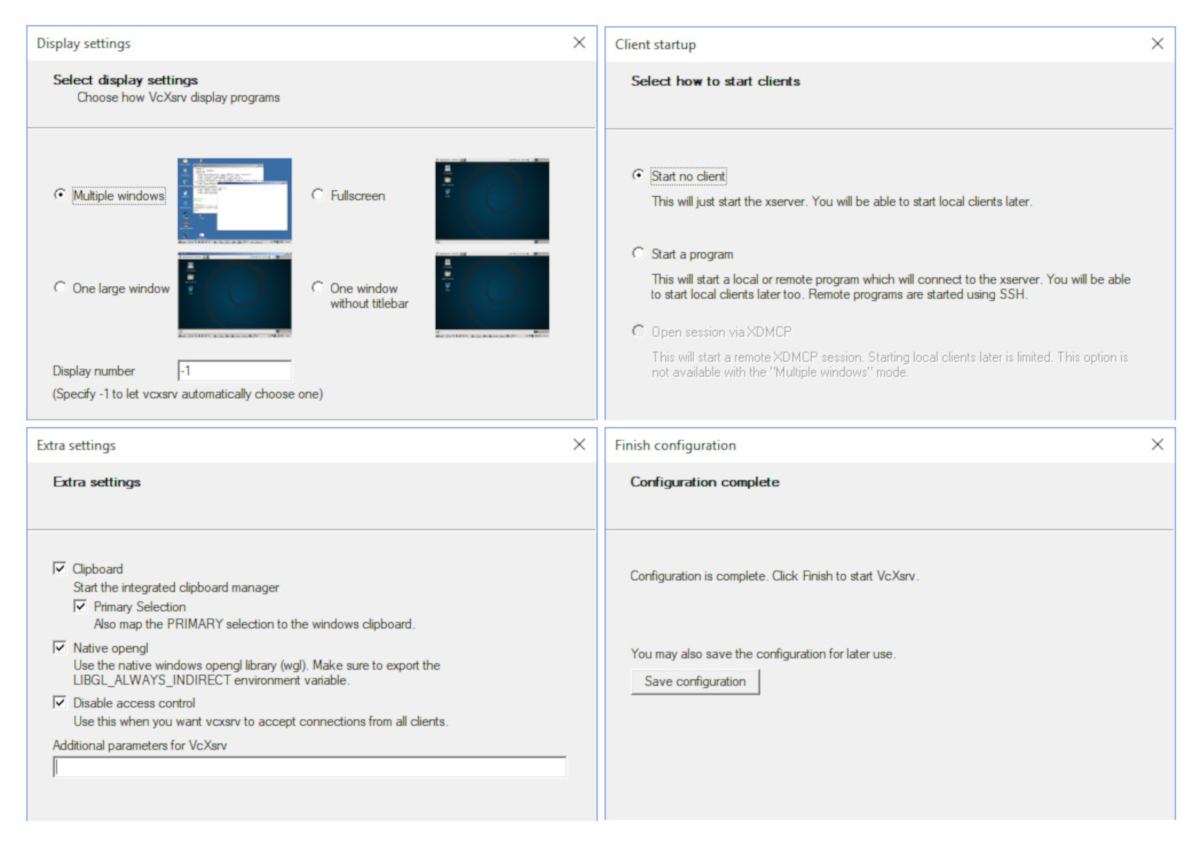
- כדי לאפשר ביצוע של יישומי GUI במיכל Docker ב-Windows, התקן תחילה את VcXSrV (https://sourceforge.net/projects/vcxsrv). בעת הפעלת VcXsrv, הגדר את ההגדרות כמו באיור S1.
הערה: ודא כי Docker ו-VcXsrv פועלים לפני הפעלת FLLIT. - לחץ פעמיים על FLLIT. bat כדי להפעיל את FLLIT.
הערה: בעת ביצוע בפעם הראשונה, ייקח זמן למשוך את תמונת Docker מ-Docker Hub.
- עבור 7 ו-10th הבית מהדורה, להתקין את ארגז הכלים Docker ב:
- התקנת FLLIT ב-MacOS
- הורד Docker שולחן עבודה עבור MacOS ב https://download.docker.com/mac/stable/Docker.dmg
- התקן socat על-ידי פתיחת מסוף והנפקת הפקודה הבאה:
בירה להתקין socat - התחל מסוקט עם:
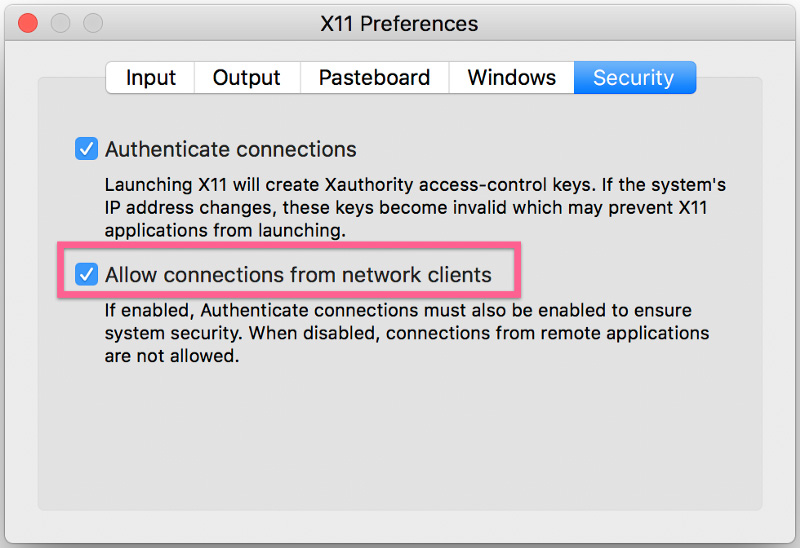
socat TCP-הקשיבו: 6000, reuseaddr, מזלג UNIX-לקוח: \ "$DISPLAY \" & התכחש - התקן XQuartz (https://www.xquartz.org) כדי לאפשר ביצוע של יישומי GUI במיכל Docker ב MacOS. הפעל את XQuartz ושנה את ההעדפות על-ידי בדיקת החיבורים המאפשרים מלקוחות רשת בכרטיסיה אבטחה כמוצג באיור S2.
הערה: ודא כי Docker, socat ו-XQuartz רצים כולם לפני הפעלת FLLIT. - פתח מסוף בספריה FLIT/הידור וביצוע FLLIT באמצעות הפקודה הבאה:
bash FLLIT_Mac. sh
הערה: בעת ביצוע בפעם הראשונה, ייקח זמן למשוך את תמונת Docker מ-Docker Hub.
5. הרצת FLLIT עבור מעקב אחר רגל אוטומטי
- פילוח
- להמיר את הווידאו לתוך קבצי TIFF בודדים ולהעתיק לתוך תיקיית הנתונים FLLIT.
- הפעל FLLIT (ב אובונטו, קליק ימני כדי לפתוח FLLIT בטרמינל).
- בחר את התיקייה המכילה את תמונות TIFF של מסגרת על-ידי מסגרת של הווידאו למעקב ולחץ על לחצן הוסף .
- בחלון המוקפץ, בחר 0 לביצוע פילוח של רגל בלבד, או 1 כדי לכלול מעקב אחר רגליים עם פילוח של רגל.
- לחץ על Done כדי ליזום פילוח ומעקב אחר הווידאו הנבחר.
- מעקב
- כדי לבדוק את הדיוק של מעקב ולבצע תיקוני שגיאות (אם בכלל), לחץ על בחירת תיקיית נתונים. בחר את התיקיה שאחריה יש לעקוב ולחץ על ' פתח'.
- לחץ על הצגת מעקב.
הערה: בדוק שמצב מציג נשאר נבחר בעת הצגת תנוחות הרגליים הנמצאות במעקב. אחרת, כל התיקונים הקודמים. שבוצעו יהיו מחוץ לרכב - בדוק את התוויות עבור כל הרגליים במסגרת הראשונה
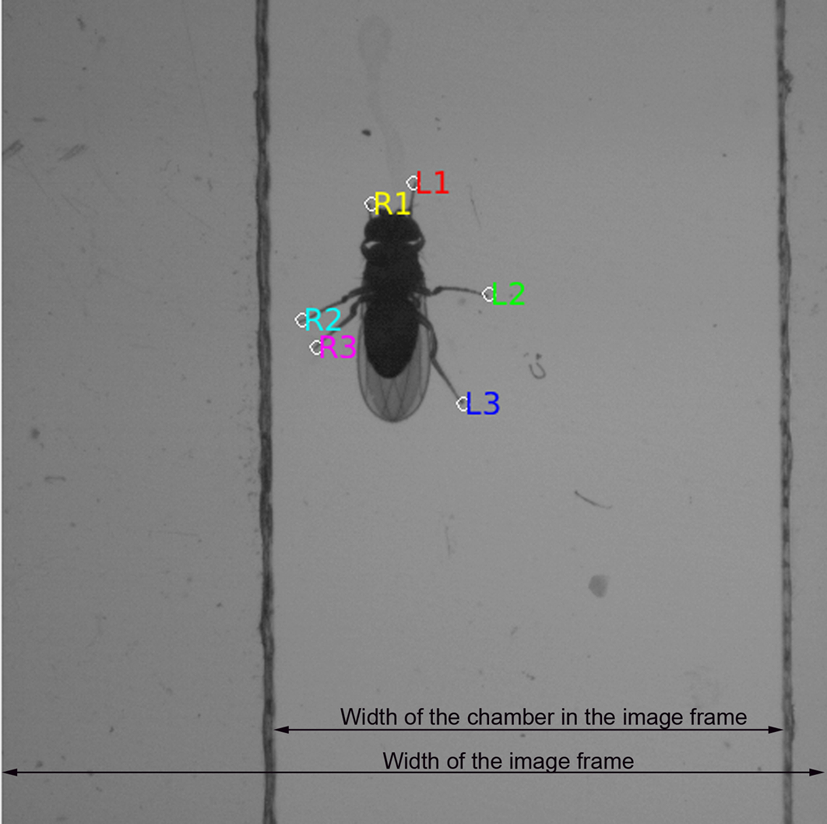
הערה: מאחר שתוויות הרגליים ממוקמות לפי המיקום שעל המסך, אם הזבוב הוא הולך זקוף, צד ימין של זבוב מתויג כמו L1 (קדמה-רגל), L2 (אמצע הרגל), L3 (הרגל האחוריות) ואת הצד השמאלי של לעוף מתויג כמו R1 (קדמה-רגל), R2 (אמצע הרגל), R3 (האחוריות), בהתאמה (איור 3). אם הזבוב הוא הולך הפוך, למטה תוויות הרגל יהיה מסומן כראוי. - אם הרגל מסומן בטעות ונדרש תיקון, לחץ על השהה הצגתולאחר מכן התאם חיזוי (איור 3).
- מתוך הלוח הימני בראש כדי לכוונן, בחר את הרגל הדורשת תיקון.
- לחץ פעמיים על המיקום הנכון עבור רגל זה בחלון התמונה, לחץ על שמור, ולאחר מכן לצאת. כדי לעבור למסגרת הקודמת או למסגרת הבאה, לחץ על השהה הצגה ולאחריו הלחצנים הבא והאחורי < i ו- i > לחצנים, בהתאמה (איור 3).
- כדי לתקן קטעי וידאו שאינם מסומנים באופן שגוי, פתח את תיקיית הנתונים של הווידאו שאחריו יש לעקוב מחדש ובחר באפשרות צור מעקב באופן ידני.
- לחץ על לחצן מעקב , שיהפוך לאחר מכן את התווית שלו להתחלה.
- לחץ על התאם חיזוי ותקן את תוויות הרגל על-ידי לחיצה כפולה על כל עצה ברגל ולאחר מכן הקצאה של תווית הרגל הנכונה. לחץ על שמור ויציאה.
- לחץ על קורות חיים כדי ליזום מעקב.
- עיבוד נתונים והפקת וידאו
- לחץ על תהליך הנתונים. בחלון המוקפץ, הקלד את מספר המסגרות לשניה (fps) בו נרשמו קטעי הווידאו (לדוגמה, 1,000 fps).
- השתמש במשוואה הבאה כדי לחשב את השדה הממשי של התצוגה של הווידאו שנלכד כך שניתן יהיה למדוד פרמטרים של הילוך במילימטרים:

הערה: לדוגמה, אם גודל החדר בפועל הוא 7 מ"מ, רוחבו של מסגרת התמונה הוא 137 מ"מ, רוחב התא במסגרת התמונה במסך המחשב הוא 81 מ"מ, ורוחבו של שדה התצוגה היה 11.83 מ"מ (S3 איור). - כדי לראות את תוצאות המעקב, עבור אל התיקיה ' מעקב ' תחת התיקיה ' תוצאות '.
- כדי ליצור סרטון וידאו של הזבוב הנמצא במעקב, בחר באפשרות ' צור וידאו'. הווידאו יישמר באותה תיקיית תוצאות כמו של נתוני וידאו המקורי שנותחו.
הערה: ניתן לבחור את מסגרות ההתחלה (הראשונה) והקצה (האחרון) של הווידאו.
- נורמליזציה לאורך הגוף של כל זבוב.
הערה: כמו כל זבוב עשוי להיות מעט שונה בגודל, פרמטרים הליכה מסוימים צריך להיות מנורמל לאורך הגוף של כל זבוב כדי להקל על השוואות (למשל, אורך פסיעה עשוי להיות ארוך יותר זבובים, וקצרים יותר זבובים).- פתח שלוש תמונות סטילס מן הווידאו של כל זבוב (בדרך כלל הראשונה, האמצעית והאחרונה המסגרות) באמצעות תוכנת התמונה.
- הגדל כל מסגרת תמונה כדי 800% ולתייג את הפיקסל הקדמי ביותר של הראש ואת הפיקסל האחורי ביותר של הבטן על קו האמצע באמצעות צבע בהיר (למשל, צהוב).
- פתחו את התמונות המסומנות בתווית ImageJ.
- השתמש באפשרות ' קבע קנה מידה ' כדי להזין את קנה המידה בהתאם: קבע מרחק בפיקסלים: 512; מרחק ידוע: שדה בפועל של תצוגה (mm) כפי שנמדד בשלב 5.3.2.; יחידת אורך: ממ.
- שרטט קו ישר בין פיקסלים בראש ובבטן המוצגים כדי להשיג את אורך הגוף.
- פתח את שינוי קנה המידה שוב כדי לקבל את הערך במרחק ידוע, שהוא אורך הגוף ב-mm.
- קח ממוצע של האורך שנקבע בכל אחד משלושת התמונות כדי להשיג את גודל הגוף הממוצע ב-mm.
תוצאות
בעקבות פילוח הרגל, מעקב ועיבוד נתונים, FLLIT יוצר באופן אוטומטי נתונים גולמיים עבור מיקומי הגוף ואת כל טופר רגל, 20 פרמטרים הילוך, 5 מגרשים וידאו מסומנים (שולחן 1).
כאן, אנו להדגים את הניתוחים הללו באמצעות מודל לעוף של האטקסיה של Spino, בלבלר SCA3 3 (. מנהל ההתקן הפאן-עצבי Elav-GAL4 השתמשו כדי לנהוג באורך מלא האדם WILDTYPE SCA3 עם 27 Glutamines ב polyq בדרכי (UAS-SCA3-flQ27), או באורך מלא האדם מוטציה SCA3 עם 84 Glutamines ב polyq בדרכי (uas-SCA3 flQ84)11. SCA3 מאופיין על ידי הילוך ataxic עם הגוף לדרוך, הצבת רגל בלתי יציבה קצר, לדרוך שלבים12,13 (טבלה 2). כדי לאפיין הילוך של מוטציה SCA3 זבובים ולחקור אם הם מציגים הליכה דומה לזה של חולים אנושיים, ניתחנו פרמטרים רלוונטיים הילוך שנוצר על ידי FLLIT, כלומר: מספר הופך הגוף, טביעת רגל באופן קבוע, הרגל חפיפה וגדלים, ואת הרגל פסיעה אורכי (טבלה 2).
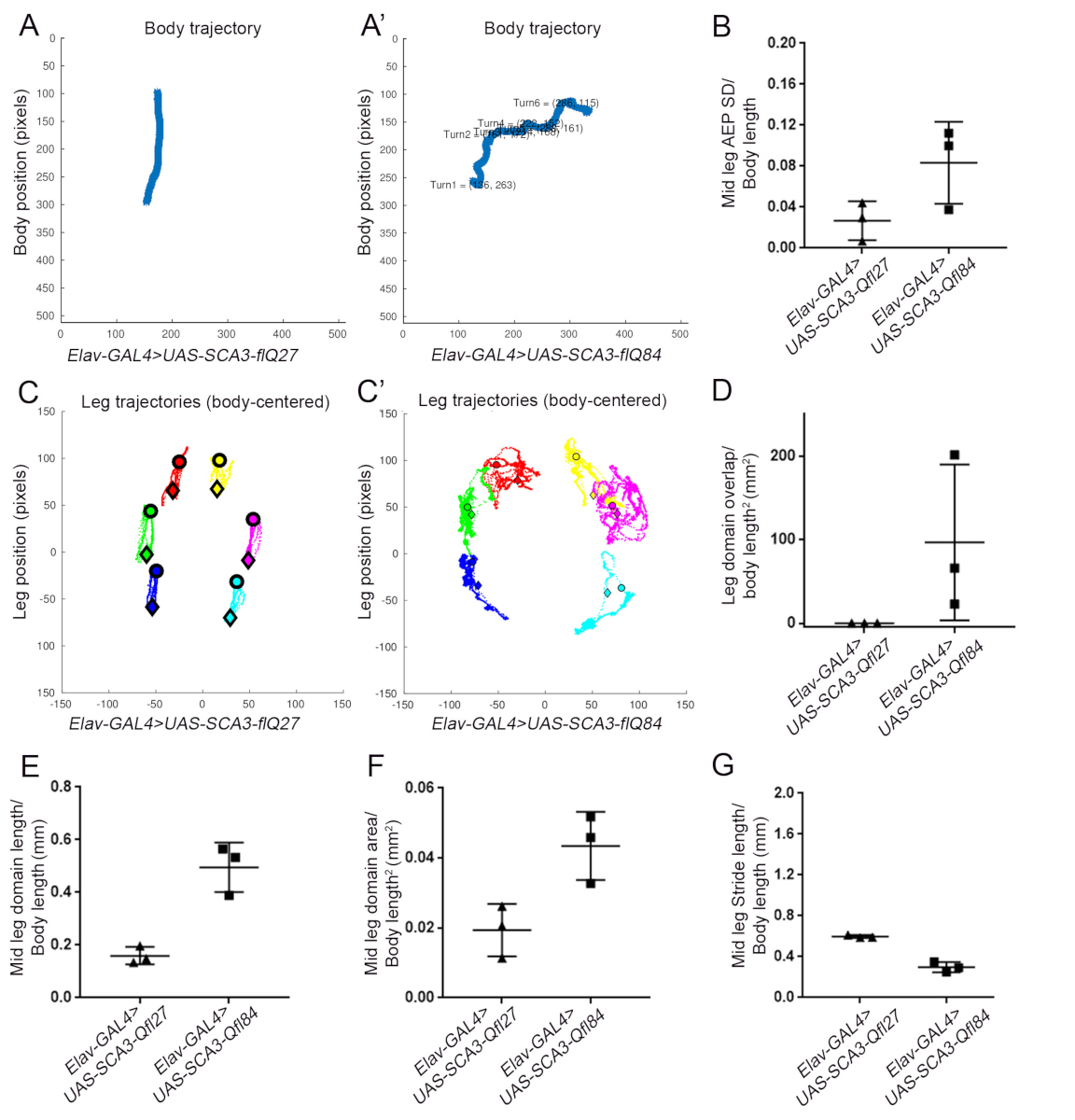
מצאנו כי SCA3-Q84 זבובים הציגו יותר תורות(איור 4א, A '), מיקום ברגל בלתי יציב כפי שהוצג על ידי טביעת רגל נמוכה (הסטיות תקן מוגדל של aep14) (איור 4b), מוגבר בתחום הרגל חפיפה (איור 4C-D), תחומים הרגל מוגדל באורך ובאזור (איור 4E, F), ואורך פסיעה ירידה (איור 4b).
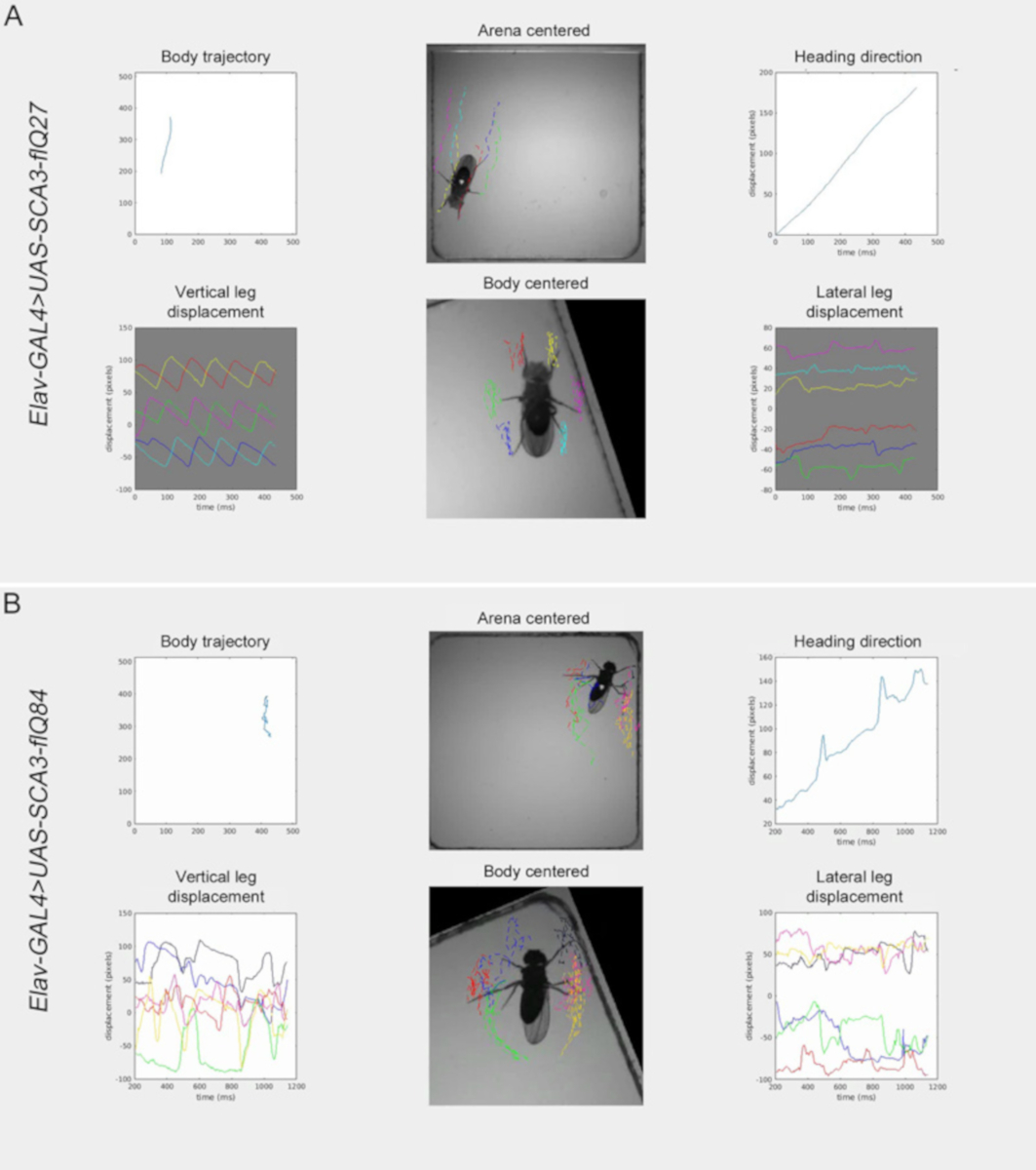
FLLIT גם מייצרת וידאו המציג את הזבוב ואת הרגליים מסומנים בזירה ממורכז, הגוף ממורכז צפיות, מסלול הגוף וכיוון הכותרת, ו אנכי ולרוחב displacements של כל רגל (איור 5). קטעי וידאו מסומנים לאפשר זה לצד זה השוואה של תנועות הרגל בזבובים שונים. וידאו מייצגים של Elav-GAL4≫ SCA3-flQ27 (וידאו 1) ו elav-GAL4> SCA3-flQ84 (וידאו 2) זבובים להדגים כי לעומת Elav-GAL4 > Uas-SCA3- flQ27 זבובים (איור 5a), elav-GAL4 > uas-SCA3-flQ84 זבובים (איור 5a) התערוכה לא סדירה, הרגל מצטלבים תחומים בגדלים שונים, מעיד על הליכה, ataxic הילוך.

איור 1. כיוונון של תחנת ההקלטה והזירה. הקלטות מתוך התצוגות הצדדיות (A) הקדמיות ו-(B). (ג) דוגמה לזירה המשמשת לביצוע הקלטות טיסה עבור מעקב fllit. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 2: מבט על החלון הפעיל במהלך הקלטת הילוך לטוס באמצעות מצלמה כפולה הראש, המאפשר הקלטה בו של שתי זבובים. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 3: חלון FLLIT פעיל המציג את לוח הלחצנים ואת הרגליים המסומנת לאחר פילוח ומעקב. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 4: מידע מייצג fllit שנוצר עבור פרמטרים רלוונטיים הילוך של זבובים מביע סוג WILDTYPE (SCA3-flQ27) לעומת המוטציות (SCA3-flQ84) SCA3. (א) מספר הפניות במסלול הגוף. (ב) רגל אמצע הרגל מנורמל לאורך הגוף. (C-C ') תחומי הרגל החוצה של כל רגל. (ד) תחום חופף בין הרגליים. (ה) אורך התחום באמצע הרגל מנורמל לאורך הגוף. (ו) אזור התחום באמצע הרגל מנורמל לאורך הגוף2. (G) באמצע הרגל פסיעה אורך מנורמל לאורך הגוף. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 5: תמונה של קטעי וידאו של נציג FLLIT שנוצר. (א) elav-GAL4 > uas-SCA3-flQ27 ו (ב) elav-GAL4 > uas-SCA3-flQ84 זבובים. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

וידאו 1: וידאו הנציג של זבוב המבטא פאן-עצבי האדם באורך מלא SCA3 (ELAV-GAL4 > UAS-SCA3-flQ27). אנא לחץ כאן כדי לצפות בסרטון וידאו זה. (לחץ לחיצה ימנית להורדה).

וידאו 2: וידאו נציג של זבוב המבטא פאן-עצבי האדם באורך מלא SCA3 (ELAV-GAL4 > UAS-SCA3-flQ84). אנא לחץ כאן כדי לצפות בסרטון וידאו זה. (לחץ לחיצה ימנית להורדה).

איור משלים 1: תצורות של VcXSrv. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור משלים 2: קביעת תצורה עבור Xquartz. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור משלים 3: תמונה מתויג עם ממדים הדרושים לחישוב שדה תצוגה. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
| קטגוריה | פרמטרים | תיאור/ | קובץ/מגרש (אם רלוונטי) |
| נתונים גולמיים | תנוחת הגוף | קואורדינטות מיקום של מרכז הגוף בתוך כל מסגרת | שתי העמודות הראשונות של CoM. csv |
| מסלול גוף | זווית סיבוב של ציר הגוף במעלות (ביחס לציר y) | העמודה השלישית של CoM. csv | |
| ארנה-טופר רגל מרוכז עמדות | מיקום הקואורדינטות של כל טופר רגל בכל מסגרת המבוססת על קואורדינטות ארנה | מסלול. csv | |
| טופר רגל מרוכז עמדות | הקואורדינטות של כל טופר רגל בכל אחת מהמסגרות מבוסס על קואורדינטות ארנה | norm_trajectory. csv | |
| מנוע גוף | אורך הגוף (mm) | אורך של החיה לדוגמה מוערך בכל מסגרת (בראש העמדה ביותר על פני האחורי-רוב עמדה על הכנפיים) | אורך גוף. csv |
| מהירות גוף מיידית (mm/s) | מהירות מיידית של הגוף (סנטאיד) בבעל החיים לדוגמה | מהירות גוף csv; . מהירות גוף pdf | |
| הפעלת נקודות הגוף סלול | כדי לאתר את נקודות המפנה, המסלול מצטמצם לעיקול טיפין-ליניארי באמצעות הדגם הקטן , לאחר שאירוע המפנה מזוהה ככרוך בזווית > 50 מעלות בין שתי השכנות מקטעים ליניאריים המהווים את המסלול הפשוט | מסלול גוף pdf | |
| פרמטרי פסיעה בודדים | משך פסיעה (אלפיות שהיא) | משך אירוע פסיעה | שסטרידפרמטרים. csv |
| תקופת פסיעה (אלפיות שהיא) | המשך מאירוע פסיעה אחד למשנהו | ||
| צעד הזחה (mm) | הזחה של ציפורן הרגל במהלך אירוע פסיעה | ||
| נתיב פסיעה מכוסה (mm) | הנתיב הכולל שמכוסה בציפורן הרגל במהלך אירוע פסיעה | ||
| עמדה קיצונית קדמית מ מ | תנוחת נחיתה (ביחס לגוף) של טופר רגל בסוף אירוע פסיעה | ||
| מעמד קיצוני אחורי (mm) | מיקום הפעלה (ביחס לגוף) של טופר רגל בתחילת אירוע פסיעה | ||
| משרעת פסיעה (mm) | הזחה בכיוון של תנועה לאירוע פסיעה | ||
| עמידת יניאריות (ממ) | מוגדר כסטייה של נתיב פסיעה מעקומה מוחלק מעל (ב-20ms מרווחי) את הקדמי המקביל והתנוחות הקיצוניות האחוריים של הפסיעה | ||
| מתיחה פסיעה (mm) | המרחק של מיקום טופר הרגל ממרכז הגוף באמצע אירוע פסיעה | ||
| תנועת רגל | מהירות הרגל (mm/s) | המהירות הנקודתית של כל רגל | לפני מהירות. csv; ההילוך. pdf |
| מדד הילוך | זה מודד את סוג של תיאום הילוך הציג על ידי בעלי חיים לדוגמה (שש רגליים) במהלך התנועה שלה. הליכה אינדקס של 1 מתאים להליכה חצובה, _ 1 מתאים להילוך הטטרפוד כאשר 0 מהווה הילוך לא קאנוני. בהטמעה שלנו, מדד ההליכה מתקבל על ידי ממוצע נע על פני חלון 120 ms | GaitIndex. csv; GaitIndex. pdf | |
| אחוז תנועה | אחוז מהזמן שהרגל בתנועה | פרמטרי הגנה מפני פרמטרים. csv | |
| תקופת פסיעה מרושעת (אלפיות שהיא) | משך ממוצע מאירוע פסיעה אחד למשנהו | פרמטרי הגנה מפני פרמטרים. csv | |
| בסדירות של טביעות הרגל (mm) | נמדד כסטיות הסטנדרטיות של האחוריים ו | פרמטרי הגנה מפני פרמטרים. csv | |
| תנוחות קיצוניות קדמיות של רגל | |||
| אזור תחום מסלול הרגל (mm2) | האזור של גוף קמור מינימלי המכיל את מסלול הרגל כולו במסגרת מרוכז הגוף של התייחסות | פרמטרים מסוימים. csv; לפני תחום. pdf | |
| אורך ורוחב של ה מתחם מסלול הרגל (mm) | מושגת באמצעות המרחק החזוי המרבי של תנוחות טופר על הראשי (אורך התחום) ו מינורי צירים ראשיים (רוחב תחום) | פרמטרי הגנה מפני פרמטרים. csv | |
| הצטלבות מתחם הרגל/חפיפה (mm2) | הצטלבות/חפיפה בין כל אפשרות | LegDomainOverlap. csv | |
| רוחב עמדה (mm) | ממוצע המרחק בין AEP ו-פפ של הרגליים השמאלי והאמצעי | StanceWidth. csv |
שולחן 1: הילוך פרמטרים שנוצרו על ידי FLLIT.
| תכונת ההילוך | ||||
| תכונות הילוך של האטאקסיה של ספיקובו 3 (SCA3) | יסטה | מיקום רגל בלתי יציב ורגל עוברת מעל | מדרגות להצטופף | צעדים קצרים |
| פרמטר מדידה | מספר אירועי הפעלת הגוף | בקביעות טביעת רגל | גודל של תחומי רגל, מידת חפיפה של תחום | אורך פסיעה |
| קובץ FLLIT | מסלול גוף pdf | פרמטרי הגנה מפני פרמטרים. csv | LegDomainOverlap. csv | שסטרידפרמטרים. csv |
שולחן 2: טבלה המציגה תכונות SCA3 הליכה ההיכר של חולים אנושיים עם פרמטרים מקבילים שלהם FLLIT וקבצי פלט.
Discussion
בכתב יד זה אנו מתארים בפרוטרוט את השלבים הכרוכים בשימוש ב-FLLIT, תוכנית למידה ממוחשבת של מחשב1, לניתוח הילוך בהליכה בלתי מפורטת של דרוזוהילה. לאחר מעקב וניתוח נתונים, FLLIT מייצרת באופן אוטומטי נתונים גולמיים עבור המידע על המיקום של הגוף ואת ציפורני הרגל, הפקת 20 הגוף ותכונות הליכה, כמו גם וידאו של לטוס מסומנים כדי לאפשר הליכה הדמיה.
יש כעת מספר שיטות למעקב אחר תנועת הרגליים של דרוזוהילה ובעלי חיים אחרים1,2,3,4,14,15,16, מתן לחוקרים מגוון רחב של אפשרויות בהתאם ליעדי הניסוי. חלק מאלה הם גישות מבוססות על הדפסה ברגל, אשר מדויקות מאוד אבל אשר מדווחים רק נקודות מגע עם משטח הזיהוי4,14. מצד שני, האחרונות למידה עמוקה גישות2,3,16 הם רב-תכליתי מאוד, המאפשר ניתוח של התנהגויות הדורשות מעקב אחר מישקים ברגל וחלקי גוף אחרים בכל חיה, עם האזהרה כי האלגוריתמים צריך תחילה להיות מאומן עם משתמשים מסומן datasets. סוג שלישי של גישה משתמש בשיטת מורפולוגיה או בשיטות המבוססות על חדות התמונה1,15,17 כדי למצוא את המתאר של כל רגל כדי לזהות תנוחות טופר. באופן כללי, שיטות אלה מתנהלות בצורה גרועה עם התנהגויות שבהן הרגליים מוצלבות (למשל במהלך הטיפוח). FLLIT משלבת את הגישות השנייה והשלישית, באמצעות פרמטרים מורפולוגיים כדי להכשיר אלגוריתם הגברת לפלח הרגל. זה מאפשר FLLIT לעקוף את משימת העמל של הביאור המשתמש כדי ליצור את ערכת הנתונים הדרכה, תוך שיפור הדיוק באמצעות מחשב למידה. שיפורים עתידיים ב-FLLIT יהיו חייבים להתמודד עם מקרים שבהם הרגליים מוצלבות, כדי לאפשר ניתוח של התנהגויות מורכבות יותר.
FLLIT היא חזקה שינויים קלים תאורה, רזולוציית הקלטה מהירות מסגרת1. עם זאת, מהירות מסגרת של קטעי וידאו מוקלטים לא צריך ליפול מתחת 250 fps, ו FLLIT פועל בצורה אופטימלית עבור קטעי וידאו שנרשמו ב 1000 fps. אם יש טשטוש תנועה בתמונות, כך שהוא מאתגר עבור ביאורים אנושיים כדי לזהות את עמדת הרגל, FLLIT לא יוכלו לזהות במדויק עצות הרגל במסגרות אלה. לאור זה, חיוני כי המצלמה תהיה ממוקדת בחדות על קצות הרגל. כדי למנוע העברת חפצים, יש לנקות את הזירה ביסודיות, ואין להעבירו במהלך ההקלטה. עבור חיסור רקע מדויק ומפלח נקי, הזבוב צריך להזיז לפחות אורך גוף אחד במהלך ההקלטה, ללא השהיה. לאחר פילוח אוטומטי ומעקב תיוג של כל הרגליים יש לבדוק. אם ההילוך לטוס לא מעקב או מעקב שלא כראוי, הקובץ צריך להיות מסומנים מחדש באופן ידני באמצעות האפשרות התחל מעקב ידני (שלב 5.2.7 – 5.2.10).
מחלות ניווניות והפרעות תנועה שכיחות יותר ויותר בחברות ההזדקנות שלנו. לטוס מודלים של ניוון נוירולוגי נחקרו במשך יותר מ 2 עשורים, במהלכו התקדמות נעשו לגבי ההיבטים המולקולריים והסלולריים של מחלות פתופסולוגיה. עם זאת, השלכות התנהגותיות ספציפיות של המחלה היו מבחינה טכנית קשה להעריך. לדוגמה, בעוד שדיווחים על תנועות רועדות בזבוב נעשו18,19, אלה לא היו לומדים ללמוד עד לאחרונה1. שיטת הטיפוס הייתה מידה שימושית וכמותית, אך גסה באופן יחסי,6. הגרעון הטכני הזה החזיק באופן דומה בניתוח תנועה ברזולוציה גבוהה במודלים של בעלי חיים אחרים. הופעתו של כלים חדשים לניתוח התנהגותי, ומכאן, יש הבטחה להצעיר את התחום של הפרעות תנועה כדי לאפשר לחוקרים ללמוד כיצד מנגנונים מולקולריים וסלולריים של מחלות נוירולוגיות מובילות לתוצאות התנהגותיות ספציפיות במודלים של בעלי חיים. במאמר זה ובעבודה הקודמת שלנו1, הצגנו באמצעות fllit כי לטוס מודלים של SCA3 התערוכה הילוך היפרקינטי ataxic, בעוד PD לטוס מודלים התערוכה הילוך קשיח היפוקינטי, לכידה הסימנים של התנועה של מחלות האדם המתאים1. ניתוח הילוך איפשר גם לנו לזהות אוכלוסיות עצבי ברורים בבסיס מסוימים התנועה בתפקוד. הולך קדימה, ניתוח התנועה מפורט, בשילוב עם הדמיה רבת עוצמה וכלים פונקציונליים זמין לעוף, יאפשר לנו להשיג תובנה הרומן לתוך מנגנונים של locomotor, להאיר את ההבנה שלנו של מחלות ניווניות ביחס למנגנון מעגלים.
FLLIT צריך להיות החלים באופן נרחב על הליכה לימוד ביצורים פרוקי רגליים קטנים אחרים, כפי שהוא הפגין בעבר להיות מדויק מאוד עבור מעקב אחר תנועות הרגל עכביש1. בעוד אנו מתמקדים כאן על השימוש בפנוטיפים לתנועה מפורטת עבור כימות הילוך פתוגניים המעגלים הבסיסיים שלה, ההתקדמות מעקב התנועה כבר מהפכה, והוא יהיה השפעה מתמשכת על, הבנה של תיאום הליכה נורמלי הילוך והמעגלים הבסיסיים שלה, במיוחד בענפים שונים של העץ האבולוציוני.
Disclosures
. למחברים אין מה לגלות
Acknowledgements
המחברים רוצים להודות למומיטה צ'מאז ולאליס לו לתמיכה טכנית, ומרכז המניות של בלומינגטון דרוזוהילה (אינדיאנה, ארה ב) להפיכת הזנים הדרוזוניים המשמשים בעבודה זו. עבודה זו נתמכת על ידי המכון לביולוגיה מולקולרית ותאית, סינגפור; מוסד ביואינפורמטיקה, סינגפור; הסוכנות עבור מדעי הטכנולוגיה וארגון המועצה משותף מחקר (מענק מספר 15302FG149 ל SA ו-LC); תוכנית הדגל המחקר הקליני (מחלת פרקינסון) מנוהל על ידי משרד סינגפור המועצה למחקר רפואי לאומי (גרנט מספר NMRC/TCR/013-NNI/2014 כדי SA), אוניברסיטת אלברטה (הפעלה מענק LC), ואת מדעי הטבע והמועצה למחקר הנדסי של קנדה (NMRC) גילוי מענק (גרנט מספר RGPIN-2019-04575 כדי LC).
Materials
| Name | Company | Catalog Number | Comments |
| Acrylic Sheets | Dama | 1.6 mm thickness, Clear sheets | Singapore, Singapore |
| Clear Glass slides | Biomedia | BMH 880101 | Singapore, Singapore |
| High speed camera | Photron | Fastcam MC2.1 | Tokyo, Japan. A shutter speed of 1 msec or faster is ideal to reduce motion blur of captured images |
| Infra Red LED | Any - Generic from hardware store | 940nm Infrared Light Board | Singapore, Singapore |
| Kimwipe | Kimberly Clark | 34155-01LS | Irving, Texas, USA |
References
- Wu, S., et al. Fully automated leg tracking of Drosophila neurodegeneration models reveals distinct conserved movement signatures. PLoS Biology. 17 (6), 3000346 (2019).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 19, 1281-1289 (2018).
- Pereira, T. D., et al. Fast animal pose estimation using deep neural networks. Nature Methods. 16 (1), 117-125 (2019).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Lu, B., Vogel, H. Drosophila models of neurodegenerative diseases. Annual Reviews in Pathology. 4, 315-342 (2009).
- McGurk, L., Berson, A., Bonini, N. M. Drosophila as an In Vivo Model for Human Neurodegenerative Disease. Genetics. 201 (2), 377-402 (2015).
- Dionne, H., Hibbard, K., Cavallaro, A., Kao, J. -. C., Rubin, G. M. Genetic reagents for making split-GAL4 lines in Drosophila. bioRxiv. , (2017).
- Cande, J., et al. Optogenetic dissection of descending behavioral control in Drosophila. eLife. 7, (2018).
- Nern, A., Pfeiffer, B. D., Rubin, G. M. Optimized tools for multicolor stochastic labeling reveal diverse stereotyped cell arrangements in the fly visual system. Proceedings of the National Academy of Sciences of the United States of America. 112 (22), 2967-2976 (2015).
- Xie, T., et al. A Genetic Toolkit for Dissecting Dopamine Circuit Function in Drosophila. Cell Reports. 23 (2), 652-665 (2018).
- Warrick, J. M., et al. Ataxin-3 suppresses polyglutamine neurodegeneration in Drosophila by a ubiquitin-associated mechanism. Molecular Cell. 18 (1), 37-48 (2005).
- Ebersbach, G., et al. Comparative analysis of gait in Parkinson's disease, cerebellar ataxia and subcortical arteriosclerotic encephalopathy. Brain. 122 (7), 1349-1355 (1999).
- Stolze, H., et al. Typical features of cerebellar ataxic gait. Journal of Neurology, Neurosurgery and Psychiatry. 73 (3), 310-312 (2002).
- Mendes, C. S., Bartos, I., Akay, T., Marka, S., Mann, R. S. Quantification of gait parameters in freely walking wild type and sensory deprived Drosophila melanogaster. eLife. 2, 00231 (2013).
- DeAngelis, B. D., Zavatone-Veth, J. A., Clark, D. A. The manifold structure of limb coordination in walking Drosophila. eLife. 8, (2019).
- Gunel, S., et al. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. eLife. 8, (2019).
- Isakov, A., et al. Recovery of locomotion after injury in Drosophila melanogaster depends on proprioception. The Journal of Experimental Biology. 219, 1760-1771 (2016).
- Aw, S. S., Lim, I. K. H., Tang, M. X. M., Cohen, S. M. A Glio-Protective Role of mir-263a by Tuning Sensitivity to Glutamate. Cell Reports. 19 (9), 1783-1793 (2017).
- Eberl, D. F., Duyk, G. M., Perrimon, N. A genetic screen for mutations that disrupt an auditory response in Drosophila melanogaster. Proceedings of the National Academy of Sciences of the United States of America. 94 (26), 14837-14842 (1997).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved