
Method Article
特徴学習脚のセグメンテーションとトラッキング(FLLIT)を用いて、自由に動く昆虫の完全自動脚追跡
要約
FLLITを用いた詳細なプロトコル、脚爪運動追跡のための完全自動化された機械学習法であるショウジョウバエメラノガスターや他の昆虫を用いた詳細なプロトコルについて説明する。これらのプロトコルは、野生型ハエ、変異型ハエ、神経変性のフライモデルにおける微妙な歩行歩行の動きを定量的に測定するために使用することができる。
要約
ショウジョウバエモデルは神経機能の研究や神経変性の根源となる分子・細胞機構の理解に非常に有益なモデルです。ニューロンサブセットの操作と研究のためのフライ技術はますます高度化していますが、結果として生じる行動型の豊かさは同様の詳細では捉えられていない。突然変異体間の比較のために微妙なフライレッグの動きを研究できるようにするには、高速かつ迅速な脚の動きを自動的に測定し、定量化する能力が必要です。そこで、自由に歩くハエ、機能学習ベースの四肢セグメンテーションおよびトラッキング(FLLIT)での自動脚爪追跡のための機械学習アルゴリズムを開発しました。ほとんどのディープラーニング方法とは異なり、FLLITは完全に自動化されており、学習アルゴリズムに組み込まれた形態パラメータを使用して、ユーザー注釈を必要とせずに独自のトレーニングセットを生成します。この記事では、FLLIT を使用して歩行分析を実行するための詳細なプロトコルについて説明します。カメラのセットアップ、アリーナ建設、ビデオ録画、脚のセグメンテーション、脚の爪の追跡の手順を詳しく説明します。また、FLLITによって生成されたデータの概要を示し、すべてのビデオフレームの生の追跡されたボディと脚の位置、20の歩行パラメータ、5つのプロット、および追跡されたビデオが含まれています。FLLITの使用を実証するために、我々は脊髄小脳失調症3のフライモデルで関連する病気の歩行パラメータを定量化する。
概要
ここ数十年で、神経変性疾患や運動障害は、私たちの高齢化人口でより一般的に成長しています。多くの神経変性疾患に対する理解は分子レベルと細胞レベルで進んでいますが、罹患した神経回路の根本的な特徴は依然として十分に理解されていません。最近開発された行動追跡ツール11、2、3、42,3,4により、分子、細胞、回路調節の根底にある疾患を特定するために、動物疾患モデルの動きの異常を研究できるようになりました。
多くの神経変性疾患に関与する分子経路は、ショウジョウバエメラノガスターの果実フライに保存されており、ショウジョウバエ病モデルは神経変性5,66の基礎となる基本的なメカニズム5を解明するのに役立っている。我々は最近、パーキンソン病(PD)および脊髄小脳失調症3(SCA3)のフライモデルが、それぞれのヒト疾患1に似た明確で保存された歩行シグネチャを示すことを示し、フライモデルが特定の運動障害における運動機能不全の基礎となる回路機構を理解できることを実証した。単一遺伝子および単一細胞レベル,7、8、9、10におけるニューロンの標的操作および視覚化のためのフライモデルにおける豊富で継続的7に成長しているツールは9、10生体内の疾患経路、神経回路および行動表現型症状の関係を調査する理想的なモデルとなる。8正確で自動化された昆虫の歩行分析を可能にするために、我々は最近、機械学習方法、Feature Lの稼ぐベースのLIMBセグメンテーションとTラッキング(FLLIT)1を開発しました。1
FLLIT は、最初に脚のピクセルをセグメント化する完全に自動化された多段アルゴリズムで構成され、その後、対応する脚の爪を見つけて追跡するために使用されます。FLLIT は、最近の作業2,3で使用されているディープラーニング アルゴリズムとは対照的に、セグメンテーションのブースト アルゴリズムを採用しています。両方のフレームワークでは、機能抽出は畳み込みカーネルの学習によって自動的に行われる点で、畳み込みニューラルネットワークとの類似点がいくつかあります。FLLIT の最初のステップでは、形態学的操作 (エッジとスケルトン化) を使用して、正の (脚のピクセル) と負の (飛行ボディの背景またはピクセル) トレーニング サンプルを高い信頼を得て自動的に生成します。したがって、FLLIT は完全に自動化されており、ユーザーに対して説明されたトレーニング サンプルは必要ありません。上記のトレーニング サンプルを使用して、分類器は、ブースト アルゴリズムのフレームワークでトレーニングされます。弱い分類子のアンサンブルは反復的に学ばされ、それぞれが特徴抽出のための一連の畳み込みカーネルとデシジョンツリーからなる。最終的に学んだ分類器は、脚のセグメンテーションに使用され、形態学的操作よりも難しい領域/ハードサンプルをよりよく識別することができ、追跡1のための全体的にはるかに正確なセグメンテーションを生成する。セグメント化された脚から、ヒントを見つけて、ハンガリーのアルゴリズムを使用して追跡します:各チップによって移動される距離の合計が最小限になるように、フレーム間でヒントを一致させることによって。FLLIT は、最後に見た位置(フライ中心座標)を記憶してオクルージョンケースを処理できるため、脚の先端がオクルージョンの下でなくなったら脚先が回収されます。
我々は以前、FLLITが脚の動きを自動的かつ正確に追跡し、高速ビデオ1から無印の自由に動くハエやクモの歩行を分析できることを示した。FLLITは、したがって、節足脚追跡に広く適用可能であるべきである。FLLIT は、形態学的パラメータを使用して機械学習トレーニングセットを抽出することで、ほとんどのディープラーニング方法に必要な手作業による注釈を必要とせずに、昆虫の脚をセグメント化して追跡するように自動的にトレーニングします。したがって、FLLITは完全に自動化されています。脚のセグメンテーションとトラッキングの後、FLLITは自動的にすべてのビデオフレーム、20の歩行パラメータ、5プロット、歩行の動きの視覚化のための追跡されたビデオで、生の追跡されたボディと脚の位置を生成します。このプロトコルは、FLLIT を使用するためのステップ バイ ステップ ガイドを提供します。
プロトコル
1. システムのセットアップ
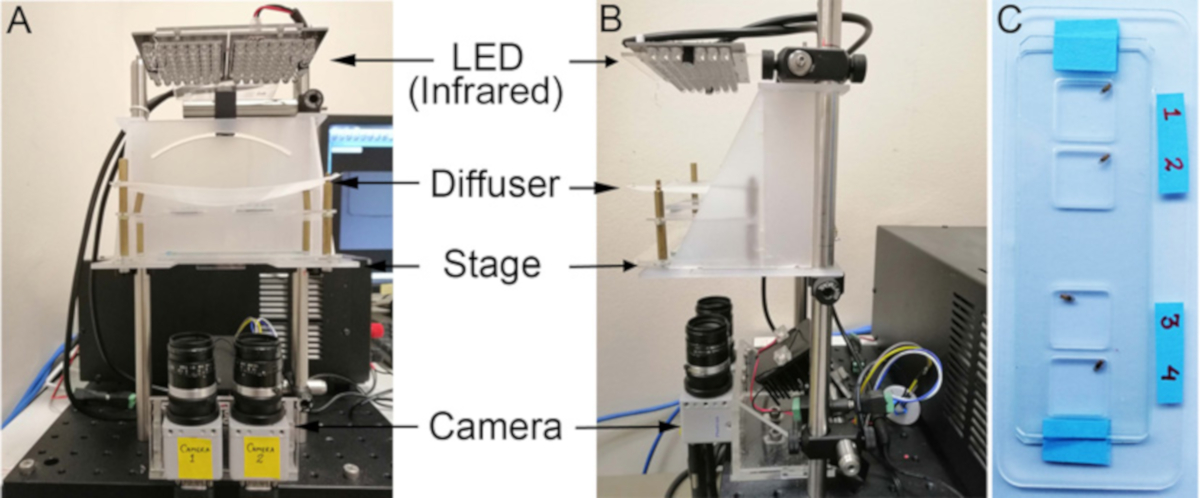
- 録画ステーションに高速カメラとステージが備わり、アリーナ室を保持するようにします(図1)。カメラを調整して、少なくとも 250 フレーム/秒 (fps) で録画し、それに応じて高速シャッタースピードを使用します(この場合、記録は 1000 fps で 1 ミリ秒のシャッタースピードで実行されます)。
注: すべてのフレームで動く脚のモーション ブラーが最小限であるか、またはまったくないようにして、ビデオがトラッキングに適していることを確認します。移動脚がぼやけて人間のアオセターが追跡できない場合は、カメラの記録速度やシャッタースピードを上げる必要があります。 - 赤外線 LED ライトをステージの上部に配置し、カメラとサンプルの間にディフューザー (半透明シート) を配置します (図 1A,B)。
- 厚さ1.6mmのアクリルシートを切断して記録室を作ります。この実験では、11 mm x 11 mmの視野を使用し、2つのガラススライドの間にチャンバーを配置します(図1C)。
2. 記録用ハエの準備
- 記録する前に新しい食品バイアル24時間に記録されるハエを転送します。
注:記録する前に24時間未満のハエにCO2(通常は最初のコレクションでハエを麻酔するために使用)を使用しないでください。 - 記録する約40分前に、ハエを空のバイアルに移し、5〜7分間氷の上に置きます。
- その間、アリーナを拭き、透明なガラススライドを水と拭きでスライドさせます。
注:チャンバーやスライドを洗浄するためにエタノールを使用しないでください。 - 録音チャンバーを準備します。顕微鏡ガラスのスライドの1つをテープでチャンバーの下に固定します。
- ハエが氷の上で麻酔をかけられたら、きれいなブラシを使って各部屋に1つのハエを移す。
注:男性と女性の両方のハエは、このセットアップで使用することができ、可能な限り、両方の男女のハエは、性固有のバイアスを避けるために分析する必要があります。 - テープで別の顕微鏡ガラススライドでチャンバーを固定します(図1C)。
- チャンバーハエを室温で15〜20分間維持し、順応します。
3. FLLIT分析用ビデオの生成
注: この手順は、使用するビデオ カメラに固有のものです。この場合、市販のビデオカメラが使用されます(資料表を参照)。
- 電源をオンにします。緑色の LED の電源が供給され、オレンジ色の LED がイーサネット インターフェイス接続が安定するまで待ちます。赤外線 LED の電源を入れ替えます。電圧が12.5Vのままであることを確認します。
- 接続されているコンピュータ システムでViewerアプリケーションを開きます。
- 記録フレームレートを 1000 fps に変更します。シャッタースピードを 1/1000 s (1 ms) に設定します。
- レコーディングアリーナにフライでチャンバーを配置し、LIVEボタンを選択します。フライがチャンバーの床を直立して歩いているときに、カメラが脚の先端に焦点を当てられるようにします。脚の先端は鋭い焦点を当てる必要があります。
- [レコード] をクリックします (図 2)。
- フライウォーキングを記録し、次のことが保証されます。
ハエはアリーナの端に触れることなく、比較的まっすぐな軌道を歩いた。
ハエは脚あたり少なくとも3歩歩いた。
ハエは散歩中に一時停止しません。
歩いた距離は、少なくとも 1 つの体長に相当します。
注: 正確なセグメンテーションを行う場合は、背景をきれいに減算することが重要です。FLLIT で採用されている自動バックグラウンド減算アルゴリズムでは、イメージされたフライが少なくとも 1 つの体長を移動する必要があります。 - [Rec Done]をクリックして録画を停止します (図 2)。
- ビデオをトリミングして、録画がオンフライの直線ウォークのみを含むようにします(ステップ 3.6 で説明)。
- [保存] をクリックします (図 2)。ファイルをそれぞれのフォルダに '.mraw' または '.tiff' 形式で保存します。
注: '.mraw' 形式は、ファイル名 (必要な場合) と '.tiff' ファイル形式と比較したビデオの保存を変更する柔軟性を高めます。
4. FLLIT プログラムのインストール
注: 最新の手順については、次のhttps://github.com/BII-wushuang/FLLIT/blob/master/Compiled/Readme.pdf
- 任意のオペレーティング システムで FLLIT をダウンロードする
- 次の Github リンクから FLLIT をダウンロードします https://github.com/BII-wushuang/FLLIT/archive/master.zip。zip ファイルの内容を抽出します。
- Google ドライブの次のリンクからサンプル データセットをダウンロード https://bit.ly/2EibvNYします。FLLIT マスター/コンパイルの下にフォルダーデータを作成し、このデータ ディレクトリにデータセット フォルダーを配置します。
- Ubuntu で FLLIT をインストールします。
- FLLIT/コンパイル済みディレクトリに移動します。
- 右クリックして[Termina l で開く]を選択します。
- 次のコマンドを発行して、matlab ランタイム ライブラリをダウンロードして $HOME/MCR にインストールします。
バッシュ MCR_2016a.sh - MATLAB ランタイム・ライブラリーのインストールが完了したら、次のコマンドを発行して、実行可能ファイルの権限が FLLIT に確実に付与されるようにします。
クモド +x FLLIT - FLLIT/コンパイル済みディレクトリーで端末をオープンし、次のコマンドを発行して FLLIT を実行します。
バッシュ run_FLLIT.sh $HOME/MCR/v901
- FLLIT を Windows にインストールする
- 7 および 10 番目のホーム エディションの場合は、Docker Toolbox をインストールします。
(https://github.com/docker/toolbox/releases/download/v19.03.1/DockerToolbox-19.03.1.exe)。 - Windows 10 Pro またはエンタープライズ エディションの場合は、次の時点で Windows 用のドッカー デスクトップをインストールします。
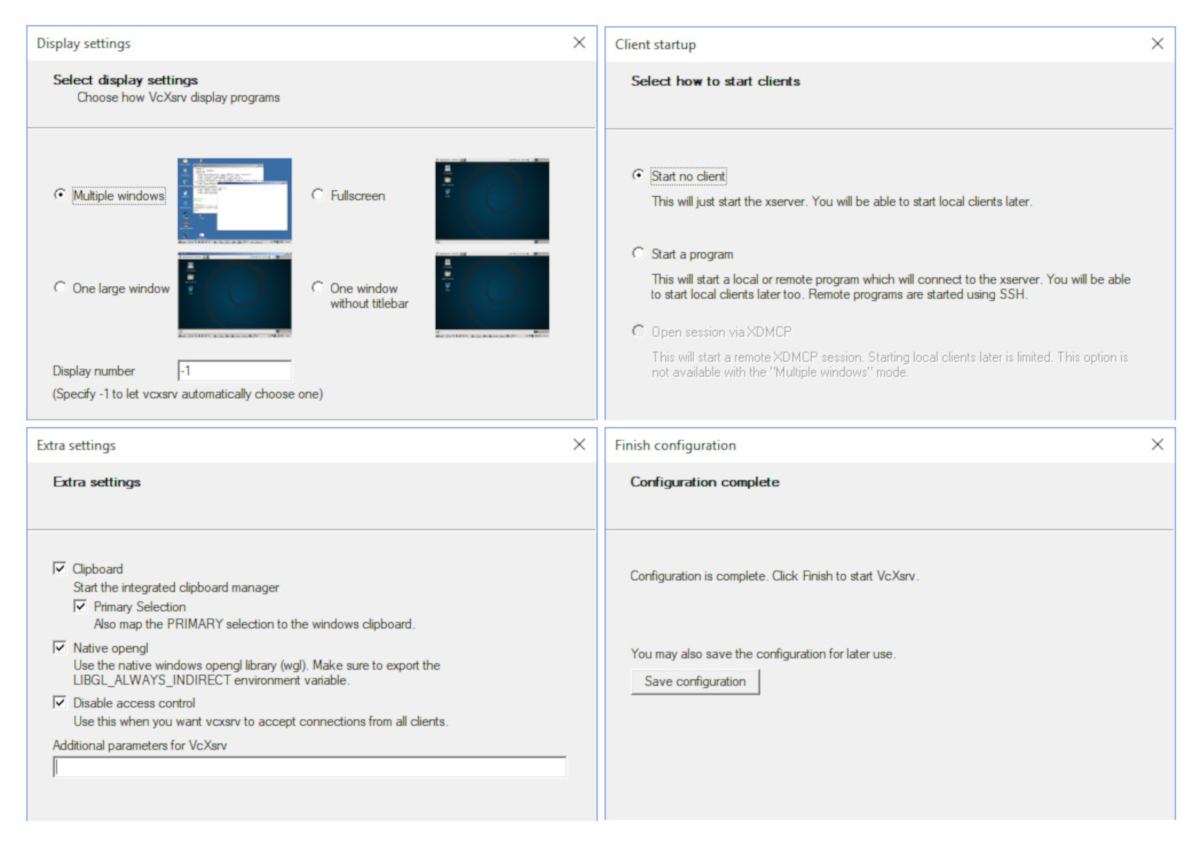
- Windows の Docker コンテナーで GUI アプリケーションの実行を有効にするには、まず VcXSrV (https://sourceforge.net/projects/vcxsrv) をインストールします。VcXsrv を起動する場合は、図 S1のように設定を構成します。
注: FLLIT を起動する前に、Docker と VcXsrv が実行されていることを確認してください。 - FLLIT.bat をダブルクリックして FLLIT を実行します。
注: 初めて実行する場合、Docker Hub から Docker イメージをプルするのに時間がかかります。
- 7 および 10 番目のホーム エディションの場合は、Docker Toolbox をインストールします。
- MacOS に FLLIT をインストールする
- https://download.docker.com/mac/stable/Docker.dmgで MacOS 用 Docker デスクトップをダウンロードする
- 端末を開き、次のコマンドを発行して、socat をインストールします。
醸造インストールソキャット - 次のサービスを使用してソキャットを開始します。
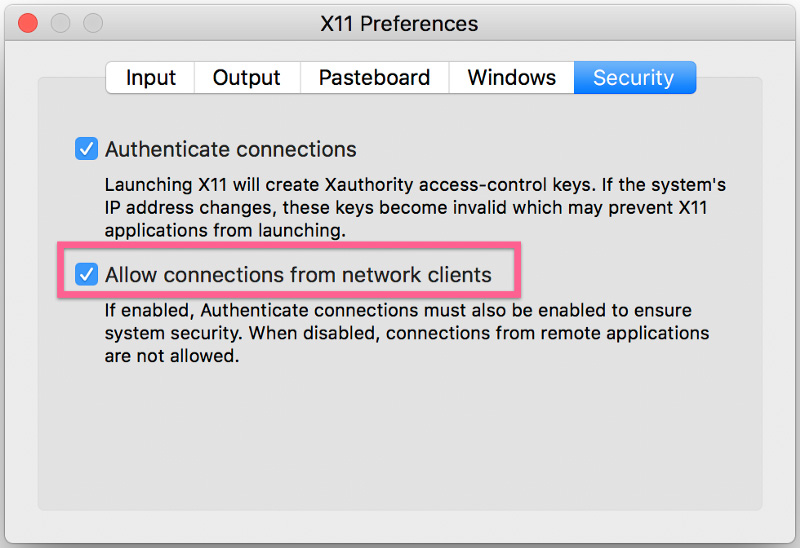
ソキャット TCP-LISTEN:6000,再利用,フォークUNIX-クライアント:\"$DISPLAY\" & 播種 - XQuartz (https://www.xquartz.org) をインストールして、MacOS の Docker コンテナーで GUI アプリケーションの実行を有効にします。図 S2に示すように、XQuartz を起動し、ネットワーククライアントからの接続を許可する] タブで 、設定を変更します。
注: FLLIT を起動する前に、Docker、socat、および XQuartz がすべて実行されていることを確認してください。 - FLLIT/コンパイル済みディレクトリー内の端末をオープンし、次のコマンドを使用して FLLIT を実行します。
バッシュ FLLIT_Mac.sh
注: 初めて実行する場合、Docker Hub から Docker イメージをプルするのに時間がかかります。
5. 自動脚追跡のための FLLIT の実行
- セグメンテーション
- ビデオを個々の TIFF ファイルに変換し、FLLIT データ フォルダーにコピーします。
- FLLITを実行します(Ubuntuでは、右クリックしてターミナルでFLLITを開きます)。
- 追跡するビデオのフレームごとの TIFF イメージを含むフォルダを選択し、[追加] ボタンをクリックします。
- ポップアップ ウィンドウで、脚のセグメンテーションのみを実行する場合は0を、脚のセグメンテーションを含む脚トラッキングを含める場合は1を選択します。
- [完了] をクリックして、選択したビデオのセグメンテーションとトラッキングを開始します。
- 追跡
- 追跡の正確性を確認し、エラー訂正を実行するには(存在する場合)、[データフォルダの選択]をクリックします。追跡するフォルダを選択し、[開く] をクリックします。
- [追跡の表示] をクリックします。
注: トラッキングされた脚の位置を表示している間は、[ビューア モード]が選択されたままになっていることを確認します。それ以外の場合、以前に行われた修正は過剰に適用されます。 - 最初のフレームのすべての脚のラベリングを確認する
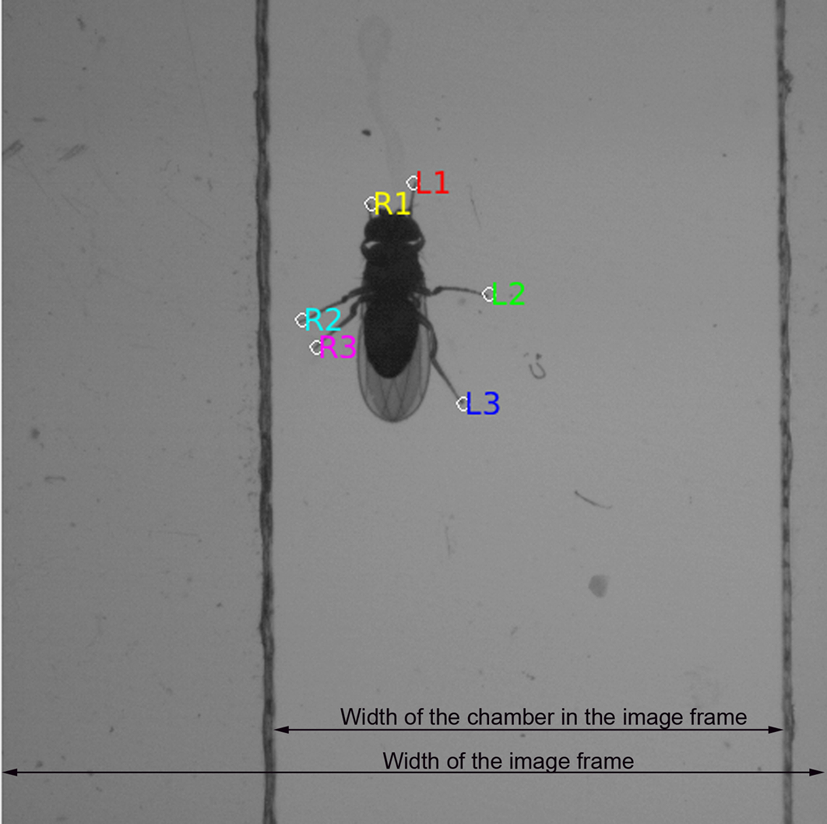
注:脚のラベルは画面上の位置に従って配置されるため、フライが直立して歩いている場合、フライの右側はL1(前脚)、L2(中脚)、L3(後ろ脚)、フライの左側にR1(前脚)、R2(中脚)、R3(後脚)、各図(3)とラベル付けされます。フライが逆さまに歩いている場合は、脚のラベルを下に正しくアポイントされています。 - 脚に誤ったラベルが付いている場合に修正が必要な場合は、[表示の一時停止] をクリックし、[予測の調整] (図 3)をクリックします。
- 右側のパネルから[脚]から[調整]に移動し、修正が必要な脚を選択します。
- 画像ウィンドウで、この脚の正しい位置をダブルクリックし、[保存] をクリックして、[終了] をクリックします。前のフレームまたは後続のフレームに移動するには、[表示を一時停止]をクリックし、次に [進む] ボタンと[I]および[I>]ボタンをクリックします (図 3)。 I>
- 誤って追跡されたビデオを修正するには、再追跡するビデオの Data フォルダを開き、[手動で追跡を開始]を選択します。
- [追跡] ボタンをクリックすると、ラベルが[初期] に変更されます。
- [予測の調整] をクリックし、各脚の先端をダブルクリックし、正しい脚ラベルを割り当てて脚のラベルを修正します。[保存して終了 ]をクリックします。
- [再開] をクリックして追跡を開始します。
- データ処理とビデオ生成
- [データ処理] をクリックします。ポップアップ ウィンドウで、ビデオが録画された 1 秒あたりのフレーム数 (fps) を入力します (たとえば、1,000 fps)。
- 次の式を使用して、キャプチャしたビデオの実際の視野を計算して、歩行パラメータをミリメートル単位で測定できるようにします。

注:例えば、実際のチャンバーサイズが7mmの場合、画像フレームの幅は137mm、コンピュータ画面上の画像フレーム内のチャンバーの幅は81mm、視野の幅は11.83mmであった(図S3)。 - 追跡結果を表示するには、結果フォルダーの下にある追跡フォルダーに移動します。
- トラックしたフライのビデオを生成するには、[ビデオの作成] を選択します。ビデオは、元のビデオデータと同じ結果フォルダに保存されます。
注: ビデオの開始(最初)と終了フレーム(最後)を選択できます。
- 各フライのボディ長に正規化。
注:各フライのサイズがわずかに異なる場合があるため、比較を容易にするために、特定の歩行パラメータを各フライのボディ長に正規化する必要があります(例えば、大きなハエではストライドの長さが長く、小さなハエでは短くなる可能性があります)。- イメージソフトウェアを使用して、各フライ(通常、最初、中間、最後のフレーム)のビデオから3つの静止画を開きます。
- 各画像フレームを800%に拡大し、明るい色(例えば黄色)を使用して、中線の頭と腹部の最も後部のピクセルの前のピクセルにラベルを付けます。
- ラベル付きのイメージを ImageJ で開きます。
- スケールを設定して、それに応じてスケールを入力します: ピクセル単位で距離を設定: 512;既知の距離: ステップ 5.3.2 で測定された実際の視野 (mm)長さの単位: mm.
- ラベル付きの頭部と腹部の先端ピクセルの間に直線を描き、体長を求めます。
- スケールを再度開いて、既知の距離(mm)のボディ長の値を取得します。
- 3つの画像のそれぞれで決定された長さの平均をとり、平均体サイズをmmで求める。
結果
脚のセグメンテーション、トラッキング、データ処理に続いて、FLLITは自動的に身体と各脚の爪の位置、20の歩行パラメータ、5プロットと追跡ビデオ(表1)の生データを生成します。
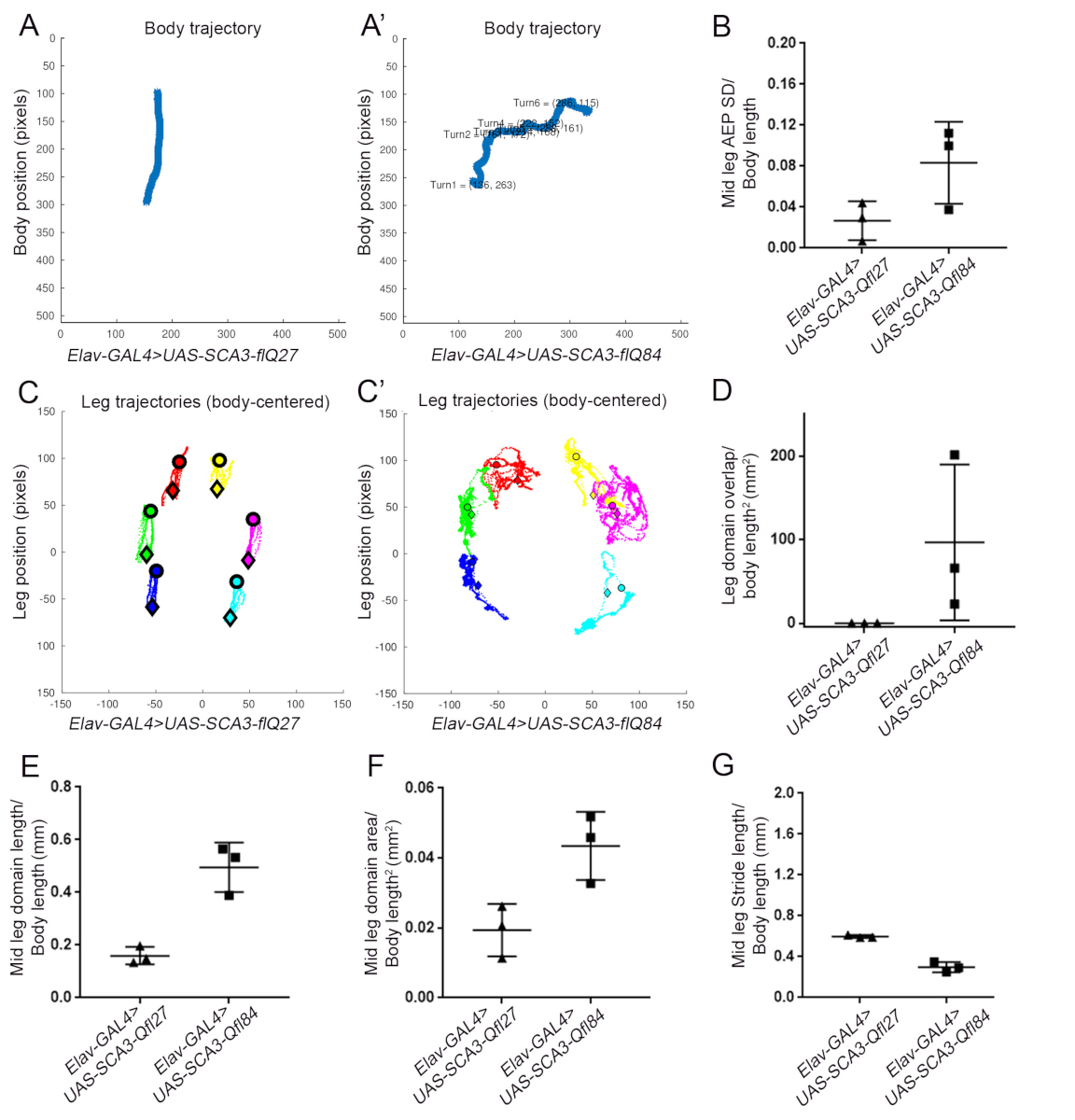
ここでは、脊髄小脳失調症3(SCA3)のフライモデルを用いてこれらの解析を行う。汎神経動ドライバー Elav-GAL4は、ポリQ管に27グルタミンを有する全長野生型ヒトSCA3(UAS-SCA3-flQ27)、またはポリQ管内に84グルタミンを有する全長変異ヒトSCA3(UAS-SCA3-flQ84)のいずれかを駆動するために使用された11。SCA3は、ボディフィーリング、不安定な足の配置と短い、潜んでいるステップ12、13(,13表2)を持つ無糖的な歩行に代表される。変異型SCA3ハエの歩行を特徴付け、ヒト患者と同様の歩行を示すかどうかを調べるため、FLLITによって生成された関連する歩行パラメータ、すなわち、身体回転数、フットプリントの規則性、脚ドメインのオーバーラップとサイズ、および脚の歩幅を分析した(表2)。
SCA3-Q84ハエは、より多くのターン(図4A,A')、低フットプリントの規則性(AEP14の標準偏差の拡大)(図4B)、脚ドメインのオーバーラップ(図4C-D)、脚ドメインの長さと面積の拡大(図4E,F)、ストライド長の減少Figure 4Gなど、より多くのターン(図4 A,A')、不規則な足の配置を示すことがわかりました。
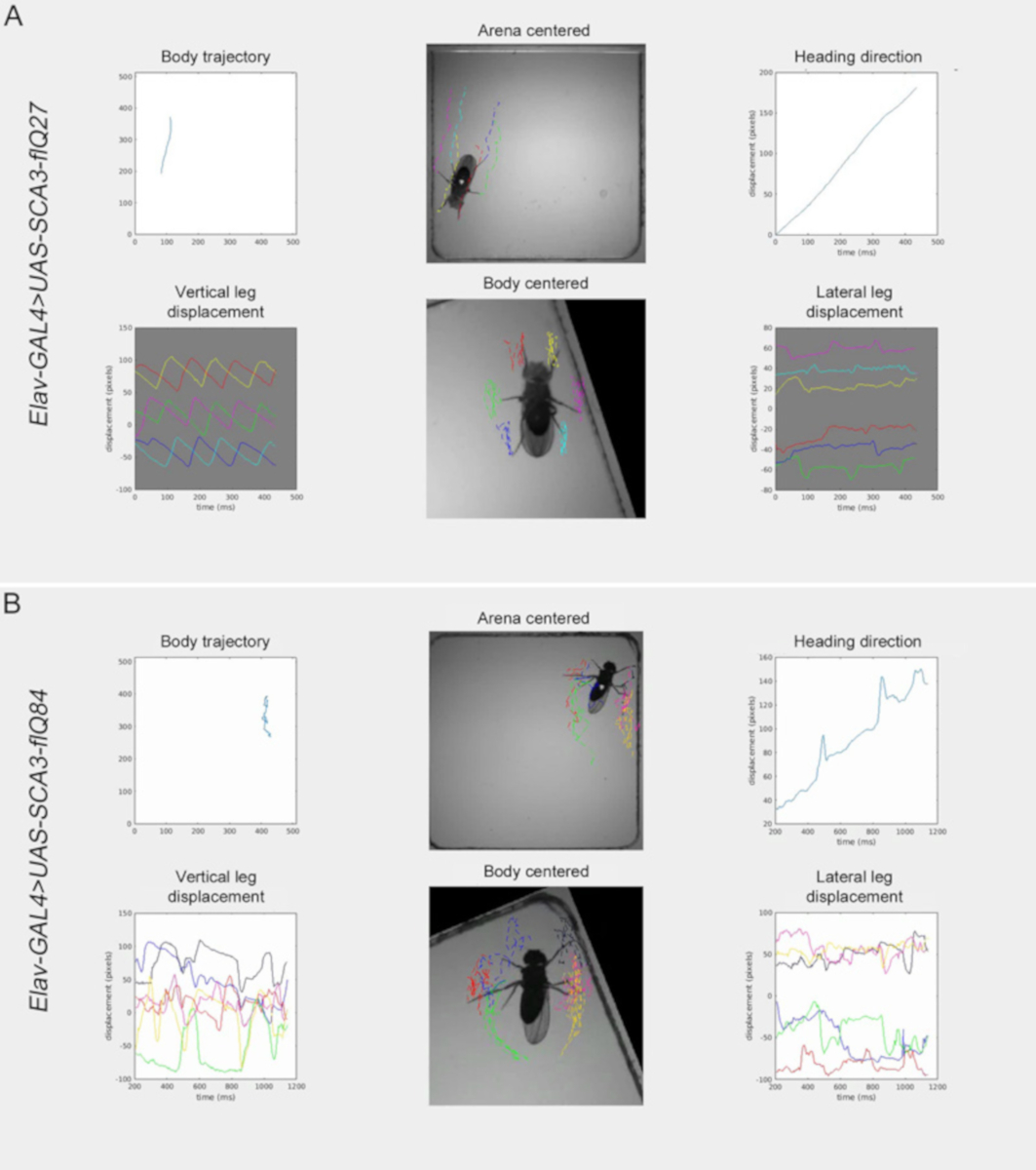
FLLITはまた、アリーナ中心および身体中心のビュー、身体軌道と方位方向、および各脚の垂直および横方向の変位で、追跡されたフライと脚を示すビデオを生成します(図5)。追跡されたビデオは、異なるハエの脚の動きを並べて比較することができます。Elav-GAL4>SCA3-flQ27 (ビデオ1)とElav-GAL4>SCA3-flQ84(ビデオ2)の代表的なビデオは、Elav-GAL4>UAS-SCA3-flQ27ハエと比較して示しています(図5)、Elav-GAL4>UAS-SCA3-flQQ異なるサイズの交差脚ドメイン、潜下、無痛歩行を示す。 Figure 5B

図 1.レコーディングステーションとアリーナのセットアップ。(A)前面からの録音と(B)側ビュー。(C) FLLIT 追跡用のフライ録音を行う際に使用されるアリーナの例。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図2:2つのハエの同時記録を可能にするデュアルヘッドカメラを使用して、フライ歩行記録中のアクティブウィンドウのビュー。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図 3: セグメンテーションとトラッキング後のボタン パネルとラベル付き脚を示すアクティブ FLLIT ウィンドウ。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図4:野生型を発現するハエの関連歩行パラメータに関する代表的FLLIT生成データ(SCA3-flQ27)対変異体(SCA3-flQ84)SCA3.(A)身体軌道におけるターン数。A(B) 中足フットプリントの規則性を体長に正規化。(C-C')各脚の横断された脚ドメイン。(D) ドメインが脚の間で重複している。(E) 中足ドメイン長をボディ長に正規化。(F) 中足ドメイン領域は、体長2に正規化された。(G) 中足歩幅の長さを体長に正規化。この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図 5: FLLIT で生成された代表的なビデオのスナップショット(A) Elav-GAL4>UAS-SCA3-flQ27および (B) Elav-GAL4>UAS-SCA3-flQ84は、ここをクリックしてこの図の大きなバージョンを表示してください。
{kind=link}

ビデオ1:汎神経野生型ヒト全長SCA3(Elav-GAL4>UAS-SCA3-flQ27)を発現するハエの代表的なビデオ。このビデオを見るには、ここをクリックしてください。(右クリックしてダウンロードします。

ビデオ2:汎神経変異体ヒト全長SCA3(Elav-GAL4>UAS-SCA3-flQ84)を発現するハエの代表的なビデオ。このビデオを見るには、ここをクリックしてください。(右クリックしてダウンロードします。

補足図 1: VcXSrv の構成この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

補足図 2: Xquartz の構成この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

補足図 3: 視野の計算に必要な寸法でラベル付けされた画像この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
| カテゴリ | パラメーター | 説明 | ファイル/プロット(該当する場合) |
| 生データ | ボディ位置 | 各フレームにおけるボディ重心の位置座標 | CoM.csv の最初の 2 つの列 |
| ボディ軌道 | ボディ軸の回転角度 (Y 軸に対する相対角度) | CoM.csv の 3 番目の列 | |
| アリーナ中心の脚の爪 位置 | アリーナ座標に基づく各フレームの各脚の爪の位置座標 | 軌道.csv | |
| ボディ中心の脚の爪 位置 | 各フレームの各脚の爪の位置座標 アリーナ座標に基づく | norm_trajectory.csv | |
| ボディモーション | 本体長さ (mm) | 各フレームで推定されるサンプル動物の長さ(頭から後部への最も前の位置) 翼の上の位置) | ボディレングス.csv |
| 瞬間的なボディ速度 (mm/s) | サンプル動物における身体の瞬間速度(中心数) | ボディベロシティ.csv;ボディベロシティ.pdf | |
| 身体の回転点 軌道 | 転換点を見つけるために、軌道はダゲルASAASPeuckerを使用して区分線形曲線に縮小される アルゴリズムは、その後に、旋回イベントが2つの隣接する間の角度>50度を含むとして識別される 単純化された軌道を構成する線形セグメント | ボディ軌道.pdf | |
| 個々のストライドパラメータ | ストライド期間 (ミリ秒) | ストライド イベントの期間 | ストライドパラメーター.csv |
| ストライド期間 (ミリ秒) | 1 つのストライド イベントから次のストライド イベントまでの期間 | ||
| ストライド変位(mm) | ストライドイベント中の脚の爪の変位 | ||
| ストライドパスカバー(mm) | ストライドイベント中に脚の爪で覆われた総パス | ||
| 前極端な位置 (mm) | ストライド イベントの最後に、脚の爪の着陸位置 (ボディに対して) | ||
| 後極端な位置 (mm) | ストライドイベント開始時の脚爪の離陸位置(身体に対する相対) | ||
| ストライド振幅 (mm) | ストライド イベントのモーション方向に沿った変位 | ||
| スタンスの直線性 (mm) | (20ms間隔で) カーブから、対応する前部のストライドパスの偏差として定義されます。 ストライドの後部極端な位置 | ||
| ストライドストレッチ(mm) | ストライドイベントの途中でボディセンターから脚の爪の位置の距離 | ||
| 脚の動き | 脚の速度(mm/s) | 各脚の瞬間的な速度 | レッグスピード.csv;ゲイト.pdf |
| 歩行指数 | これは、その動きの間に(6本足の)サンプル動物によって示される歩行の配位のタイプを測定する。歩行 1のインデックスは三脚歩行に対応し、_1は四脚歩行に対応し、0は非正規歩行を構成する。 この実装では、歩行指数は120msのウィンドウ上の移動平均によって得られます | ゲイトインデックス.csv;ゲイトインデックス.pdf | |
| 移動率 | 脚が動いている時間の割合 | レッグパラメーター.csv | |
| 平均ストライド期間 (ミリ秒) | 1 つのストライド イベントから次のストライド イベントまでの平均所要時間 | レッグパラメーター.csv | |
| フットプリントの規則性 (mm) | 後部の標準偏差として測定され、 | レッグパラメーター.csv | |
| 脚の前極端な位置 | |||
| 脚軌道領域 (mm2) | 体中心の基準フレームに脚全体の軌道を含む最小凸包の領域 | レッグパラメーター.csv;レッグドメイン.pdf | |
| の長さと幅 脚軌道領域 (mm) | 主要な(ドメイン長)およびマイナーに爪の位置の最大投影距離を介して得られる (ドメイン幅) 主軸 | レッグパラメーター.csv | |
| レッグドメインの交差/オーバーラップ (mm2) | 可能な各々の交差/重複 | レッグドメインオーバーラップ.csv | |
| スタンス幅 (mm) | 左足と中足のAEPとPEP間の距離の平均 | スタンス幅.csv |
表 1: FLLIT によって生成された歩行パラメーター。
| 足取り機能 | ||||
| 脊髄小脳失調症3の足取り特徴(SCA3) | 方向 転換 | 不規則な足の配置と脚の交差 | 潜路 | 短い歩幅 |
| 測定パラメータ | ボディ ターン イベントの数 | フットプリントの規則性 | レッグドメインのサイズ、ドメインの重複度 | ストライドの長さ |
| FLLITファイル | ボディ軌道.pdf | レッグパラメーター.csv | レッグドメインオーバーラップ.csv | ストライドパラメーター.csv |
表2:対応するFLLITパラメータと出力ファイルを持つヒト患者における顕著なSCA3歩行特徴を示す表。
ディスカッション
本稿では、自動機械学習プログラム1であるFLLITを使用して、自由に歩行するショウジョウバエの歩行を分析する手順を詳細に説明します。追跡とデータ分析の後、FLLITは自動的に身体と脚の爪の位置情報の生データを生成し、20のボディおよび歩行特徴と追跡フライのビデオを生成して歩行可視化を可能にします。
ショウジョウバエや他の,動物1、2、3、4、14、15、162,3の脚の動きの追跡のための多くの方法があり4,14、15,研究者は実験の目的に応じて幅広いオプションを与えます。116これらのいくつかは、非常に正確であるが、検出面44、1414との爪接触点のみを報告する、フットプリンティングベースのアプローチです。一方、最近のディープラーニングアプローチ22、3、163,16は汎用性が高く、あらゆる動物の脚関節やその他の身体部分の追跡を必要とする行動を分析することができ、アルゴリズムは最初にユーザーにコメント付きデータセットを使用して訓練する必要があるという警告があります。3 番目のアプローチでは、モルフォロジーまたはイメージ コントラスト ベースのメソッド1、15,、17を使用して、各脚のアウトラインを見つけて爪の位置を特定します。一般に、これらのメソッドは、脚が交差する動作(例えば、グルーミング中)に対処する方法が不十分です。FLLIT は、形態学的パラメータを使用して脚のセグメンテーションのためのブースト アルゴリズムをトレーニングする、第 2 および第 3 のアプローチを組み合わせています。これにより、機械学習を使用して精度を向上させながら、FLLIT はユーザー注釈の面倒なタスクをバイパスしてトレーニング データセットを生成できます。FLLIT の将来の改善は、より複雑な動作の分析を可能にするために、脚が交差するインスタンスに対処する必要があります。
FLLIT は、照明、記録解像度、フレーム速度1のわずかな変化に強い。ただし、録画したビデオのフレーム速度は 250 fps を下回らない必要があり、FLLIT は 1000 fps で録画されたビデオに最適に動作します。画像にモーション ブラーが存在する場合、人間のアオファクタが脚の位置を識別することが困難な場合、FLLIT はそれらのフレーム内の脚の先端を正確に識別できません。このことを踏まえて、脚の先端にカメラを鋭く集中させることが不可欠です。セグメンテーションのアーティファクトを防ぐために、アリーナは完全にクリーニングする必要があり、記録中に移動しないでください。正確な背景の減算とクリーンなセグメンテーションのために、フライは一時停止することなく、記録中に少なくとも1つのボディ長を移動する必要があります。自動セグメンテーションとトラッキングの後、すべての脚のラベリングをチェックする必要があります。フライの歩行が誤って追跡または追跡されていない場合は、手動で追跡を開始オプションを使用してファイルを手動で再追跡する必要があります (ステップ 5.2.7 - 5.2.10)。
私たちの高齢化社会では、神経変性疾患や運動障害がますます蔓延しています。神経変性のフライモデルは20年以上前から研究されており、その間に疾患病態生理学の分子および細胞的側面に関する進歩がなされてきた。しかし、疾患の特定の行動の結果は、技術的に評価することは困難であった。例えば、ハエの震動の報告は18、19,19になされたが、これらは最近まで定量的に研究されていなかった1。クライミングアッセイは有用で定量的でありながら、比較的粗い尺度6.この技術的な赤字は、同様に他の動物モデルにおける高解像度運動分析を妨げている。行動分析のための新しいツールの出現は、したがって、神経筋疾患の分子および細胞メカニズムが動物モデルにおける特定の行動結果につながる方法を研究者が研究できるように、運動障害の分野を若返らせることを約束しています。本論文及び前回の研究1では、SCA3のフライモデルが超運動性無酸素足取りを示すFLLITを用いて示し、PDフライモデルは、それぞれのヒト疾患の運動特徴を再現する低運動性の剛性歩行を示す。歩行分析はまた、特定の運動機能不全の根底にある明確な神経集団を同定することを可能にした。今後、詳細な動き分析と、その場で利用可能な強力なイメージングと機能ツールを組み合わせることで、ロコモ運動機能障害のメカニズムに関する新しい洞察を得ることができ、回路メカニズムに関する神経変性疾患の理解を明示することができます。
FLLITは、以前にクモの脚の動きを追跡するための非常に正確であることが実証されたように、他の小さな節足動物の歩行を研究するために広く適用されるべきです1.ここでは、病原性歩行とその基礎回路を定量化するための詳細な運動フェノタイピングの使用に焦点を当てていますが、動き追跡の進歩はすでに革命しており、通常の歩行の協調と歩行とその基礎となる回路、特に進化の木の無数の異なる枝の理解に継続的な影響を与えます。
開示事項
著者らは開示するものは何もない。
謝辞
著者らは、技術サポートのためにムーミタ・チャッタージーとアリス・リュウ、そしてブルーミントン・ショウジョウバエ・ストック・センター(インディアナ州、米国)がこの作品で使用されるショウジョウバエ株を利用可能にしてくれたことに感謝したいと考えています。この研究は、シンガポール分子細胞生物学研究所の支援を受けました。シンガポールバイオインフォマティクス研究所科学技術研究共同協議会機構(SAおよびLCに対する補助金番号15302FG149);シンガポール保健省の国立医学研究評議会(SAへの助成金番号NMRC/TCR/013-NNI/2014)、アルバータ大学(LCへのスタートアップ助成金)、カナダ自然科学工学研究評議会(NSERC)ディスカバリーグラント(助成番号RGPIN-2019-0457)が運営する臨床研究旗艦プログラム(パーキンソン病)。
資料
| Name | Company | Catalog Number | Comments |
| Acrylic Sheets | Dama | 1.6 mm thickness, Clear sheets | Singapore, Singapore |
| Clear Glass slides | Biomedia | BMH 880101 | Singapore, Singapore |
| High speed camera | Photron | Fastcam MC2.1 | Tokyo, Japan. A shutter speed of 1 msec or faster is ideal to reduce motion blur of captured images |
| Infra Red LED | Any - Generic from hardware store | 940nm Infrared Light Board | Singapore, Singapore |
| Kimwipe | Kimberly Clark | 34155-01LS | Irving, Texas, USA |
参考文献
- Wu, S., et al. Fully automated leg tracking of Drosophila neurodegeneration models reveals distinct conserved movement signatures. PLoS Biology. 17 (6), 3000346 (2019).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 19, 1281-1289 (2018).
- Pereira, T. D., et al. Fast animal pose estimation using deep neural networks. Nature Methods. 16 (1), 117-125 (2019).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Lu, B., Vogel, H. Drosophila models of neurodegenerative diseases. Annual Reviews in Pathology. 4, 315-342 (2009).
- McGurk, L., Berson, A., Bonini, N. M. Drosophila as an In Vivo Model for Human Neurodegenerative Disease. Genetics. 201 (2), 377-402 (2015).
- Dionne, H., Hibbard, K., Cavallaro, A., Kao, J. -. C., Rubin, G. M. Genetic reagents for making split-GAL4 lines in Drosophila. bioRxiv. , (2017).
- Cande, J., et al. Optogenetic dissection of descending behavioral control in Drosophila. eLife. 7, (2018).
- Nern, A., Pfeiffer, B. D., Rubin, G. M. Optimized tools for multicolor stochastic labeling reveal diverse stereotyped cell arrangements in the fly visual system. Proceedings of the National Academy of Sciences of the United States of America. 112 (22), 2967-2976 (2015).
- Xie, T., et al. A Genetic Toolkit for Dissecting Dopamine Circuit Function in Drosophila. Cell Reports. 23 (2), 652-665 (2018).
- Warrick, J. M., et al. Ataxin-3 suppresses polyglutamine neurodegeneration in Drosophila by a ubiquitin-associated mechanism. Molecular Cell. 18 (1), 37-48 (2005).
- Ebersbach, G., et al. Comparative analysis of gait in Parkinson's disease, cerebellar ataxia and subcortical arteriosclerotic encephalopathy. Brain. 122 (7), 1349-1355 (1999).
- Stolze, H., et al. Typical features of cerebellar ataxic gait. Journal of Neurology, Neurosurgery and Psychiatry. 73 (3), 310-312 (2002).
- Mendes, C. S., Bartos, I., Akay, T., Marka, S., Mann, R. S. Quantification of gait parameters in freely walking wild type and sensory deprived Drosophila melanogaster. eLife. 2, 00231 (2013).
- DeAngelis, B. D., Zavatone-Veth, J. A., Clark, D. A. The manifold structure of limb coordination in walking Drosophila. eLife. 8, (2019).
- Gunel, S., et al. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. eLife. 8, (2019).
- Isakov, A., et al. Recovery of locomotion after injury in Drosophila melanogaster depends on proprioception. The Journal of Experimental Biology. 219, 1760-1771 (2016).
- Aw, S. S., Lim, I. K. H., Tang, M. X. M., Cohen, S. M. A Glio-Protective Role of mir-263a by Tuning Sensitivity to Glutamate. Cell Reports. 19 (9), 1783-1793 (2017).
- Eberl, D. F., Duyk, G. M., Perrimon, N. A genetic screen for mutations that disrupt an auditory response in Drosophila melanogaster. Proceedings of the National Academy of Sciences of the United States of America. 94 (26), 14837-14842 (1997).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved