
Method Article
Полностью автоматизированное отслеживание ног в свободно движущихся насекомых с помощью функции обучения ногу сегментации и слежения (FLLIT)
В этой статье
Резюме
Мы описываем подробные протоколы для использования FLLIT, полностью автоматизированный метод машинного обучения для отслеживания движения когтей ног в свободно движущихся Drosophila melanogaster и других насекомых. Эти протоколы могут быть использованы для количественного измерения тонких ходячих движений походки у диких мух типа, мух-мутантов и моделей мухоженных моделей нейродегенерации.
Аннотация
Модель Дрозофилы имеет неоценимое значение для изучения неврологических функций и для понимания молекулярных и клеточных механизмов, лежащих в основе нейродегенерации. В то время как мухи методы для манипуляции и изучения нейронных подмножеств становятся все более изощренными, богатство результирующих поведенческих фенотипов не было захвачено на аналогичную деталь. Для того, чтобы иметь возможность изучать тонкие движения ног летать для сравнения среди мутантов требуется способность автоматически измерять и количественно высокоскоростных и быстрых движений ног. Таким образом, мы разработали алгоритм машинного обучения для автоматизированного отслеживания когтей ног в свободно ходячих мухах, сегментации и отслеживания конечностей на основе функций обучения (FLLIT). В отличие от большинства методов глубокого обучения, FLLIT полностью автоматизирован и генерирует свои собственные учебные наборы без необходимости аннотации пользователя, используя морфологические параметры, встроенные в алгоритм обучения. В этой статье описывается подробный протокол для проведения анализа походки с использованием FLLIT. В нем подробно описаны процедуры установки камеры, строительства арены, видеозаписи, сегментации ног и отслеживания когтей ног. Он также дает обзор данных, полученных FLLIT, который включает в себя сырые гусеничные положения тела и ног в каждом видеокадре, 20 параметров походки, 5 участков и гусенивое видео. Чтобы продемонстрировать использование FLLIT, мы количественно соответствующие параметры больной походки в лету модель Spinocerebellar атаксия 3.
Введение
В последние несколько десятилетий нейродегенеративные заболевания и двигательные расстройства стали более распространенными среди стареющих групп населения. Хотя наше понимание многих нейродегенеративных заболеваний продвинулось на молекулярном и клеточном уровне, фундаментальные особенности пораженных нейронных схем, лежащих в основе заболевания, остаются плохо изученными. Недавно разработанные инструменты поведенческого отслеживания1,2,,3,4теперь позволяют нам изучать нарушения движения в моделях болезней животных для того, чтобы определить молекулярные, клеточные и цепи дисрегуляции основного заболевания.4
Молекулярные пути, участвующие во многих нейродегенеративных заболеваний сохраняются в плодовой мухи Drosophila melanogaster, и модели болезни Дрозофилы помогли выяснить фундаментальные механизмы, лежащие в основе нейродегенерации5,6. Недавно мы показали, что летать модели болезни Паркинсона (PD) и Spinocerebellar атаксия 3 (SCA3) экспонат различные, сохраненные походки подписи, которые напоминают те из соответствующих человеческих заболеваний1, демонстрируя, что летать модель может быть использована для понимания схемы механизмов, лежащих в основе дисфункции движения в конкретных расстройств движения. Богатый и постоянно растущий арсенал инструментов в модели мухи для целевых манипуляций и визуализации нейронов на одном гене и уровне одной клетки7,,88,9,10 делает летать идеальной моделью, чтобы исследовать связь между путями болезни, нейрональной схемы и поведенческого фенотипического проявления in vivo. Для обеспечения точного, автоматизированного анализа походки насекомых, мы недавно разработали метод машинного обучения, Feature Lзаработка на основе LIMb сегментации и Tстеллажи (FLLIT)1.
FLLIT состоит из полностью автоматизированного многоступенчатого алгоритма, который сначала сегментирует пиксели ног, которые впоследствии используются для обнаружения и отслеживания соответствующих когтей ног. FLLIT использует алгоритм повышения для сегментации, в отличие от алгоритмов глубокого обучения, используемых в недавней работе2,3. Есть некоторые сходства с конволюционными нейронными сетями в том, что для обеих фреймворков извлечение функций осуществляется автоматически через изучение конволюционных ядер. Первый шаг в FLLIT включает в себя использование морфологических операций (край и скелетизация) для автоматического получения положительных (пикселей на ногах) и отрицательных (фон или пикселей на теле мухи) учебные образцы с высокой уверенностью. Таким образом, FLLIT полностью автоматизирован и не требует аннотированных пользователем учебных образцов. Используя вышеуказанные учебные образцы, классификатор затем обучается в рамках алгоритма повышения. Ансамбль слабых классификаторов итеративно изучен, с каждым состоящим из набора конволюционных ядер для извлечения функций и дерева решений. Окончательный узнал классификатор затем используется для сегментации ног и способен лучше различить трудные регионы / жесткие образцы лучше, чем морфологические операции, производя в целом гораздо более точную сегментацию для отслеживания1. Из сегментированных ног мы находим подсказки и отслеживаем их с помощью венгерского алгоритма: сопоставляя советы по рамкам таким образом, чтобы сумма расстояния, пройденного каждым кончиком, сведена к минимуму. FLLIT может обрабатывать случаи окклюзии, вспоминая последнее место видели (в мухи по центру координаты), так что кончик ноги восстанавливается, как только он больше не находится под окклюзией.
Ранее мы показали, что FLLIT может автоматически и точно отслеживать движения ног и анализировать походку в немаркированной, свободно движущейся мухе или пауке с высокоскоростного видео1; FLLIT должны, следовательно, должны быть широко применимы для членистоногих ног отслеживания. Извлекая наборы обучения машинного обучения с использованием морфологических параметров, FLLIT автоматически тренирует себя сегментировать и отслеживать ноги насекомых без необходимости кропотливой ручной аннотации, которая необходима для большинства методов глубокого обучения. FlLIT, следовательно, полностью автоматизирована. После сегментации ног и отслеживания, FLLIT автоматически производит сырые гусеничные положения тела и ног в каждом видеокадре, 20 параметров походки, 5 участков и гусенивое видео для анализа походки и визуализации движений походки. Этот протокол обеспечивает пошаговый ориентир для использования FLLIT.
протокол
1. Установка системы
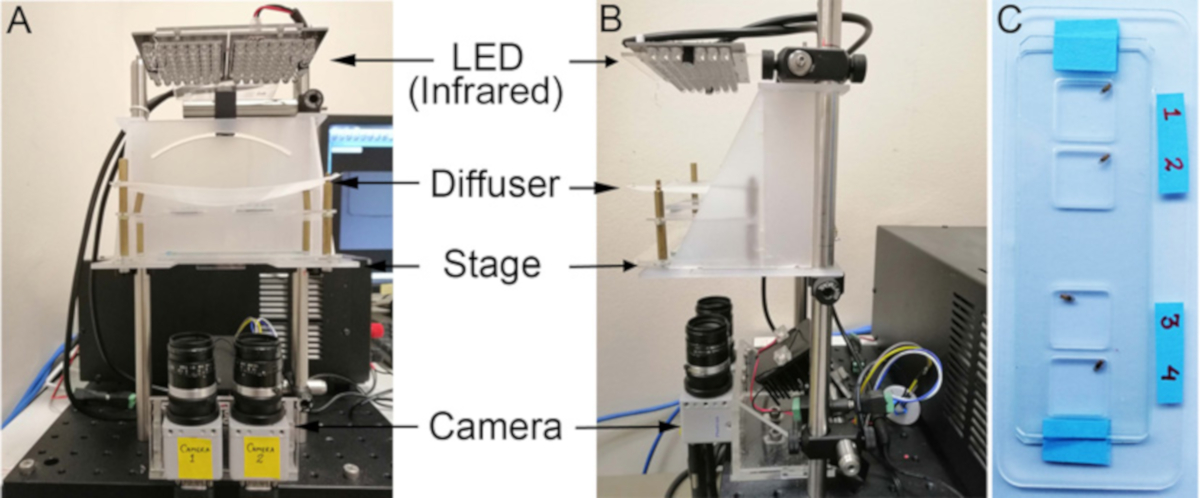
- Убедитесь, что станция звукозаписи имеет высокоскоростную камеру и сцену над ней, чтобы держать камеру арены(рисунок 1). Отрегулируйте камеру для записи не менее 250 кадров в секунду (fps), с соответственно быстрой скоростью затвора (в этом случае запись выполняется со скоростью 1000 кадров в секунду со скоростью затвора 1 мс).
ПРИМЕЧАНИЕ: Убедитесь, что видео подходит для отслеживания, гарантируя, что есть минимальное или нет движения размытия движущихся ног во всех кадрах. Если движущаяся нога настолько размыта, что аннотатор человека не может отследить ее, то скорость записи камеры и/или скорость затвора должна быть увеличена. - Поместите инфракрасные светодиодные фонари в верхней части сцены с диффузором (полупрозрачный лист) между камерой и образцом(рисунок 1A,B).
- Сделайте камеру записи, разрезая акриловый лист толщиной 1,6 мм. В этом эксперименте используйте поле зрения 11 мм х 11 мм. Поместите камеру между двумя стеклянными слайдами(рисунок 1С).
2. Подготовка мух для записи
- Передача мух, которые будут записаны в новый флакон пищи 24 ч до записи.
ПРИМЕЧАНИЕ: Не используйте CO2 (обычно используется для анестезии мух на первой коллекции) на мух менее 24 ч до записи. - Около 40 минут перед записью, переложить мух в пустые флаконы и держать на льду в течение 5-7 минут.
- В то же время, протрите арену и прозрачные стеклянные горки с водой и салфеткой.
ПРИМЕЧАНИЕ: Не используйте этанол для очистки камер и горок. - Подготовьте камеру звукозаписи. Исправить один из микроскопических стеклянных слайдов под камерой с лентой.
- Когда мухи были обезбезображены на льду, передача одной мухи в каждой камере с помощью чистой кисти.
ПРИМЕЧАНИЕ: Как мужчины, так и женщины мухи могут быть использованы в этой установке, и, насколько это возможно, мухи обоих полов должны быть проанализированы, чтобы избежать секс-специфических предубеждений. - Закрепите камеру с другой микроскопической стеклянной слайд с лентой(рисунок 1C).
- Держите камерные мухи при комнатной температуре в течение 15 - 20 минут для акклиматизации.
3. Поколение видео для анализа FLLIT
ПРИМЕЧАНИЕ: Этот шаг специфичен для используемой видеокамеры. В этом случае используется коммерчески доступная видеокамера (см. Таблицу Материалов).
- Включите источник питания. Подождите зеленый светодиод для питания и оранжевый светодиод для подключения интерфейса Ethernet для стабилизации. Включите питание для инфракрасного светодиода. Убедитесь, что напряжение остается на уровне 12,5 В.
- Откройте приложение Viewer на подключенной компьютерной системе.
- Измените частоту записи кадров на 1000 кадров в секунду. Установите скорость затвора до 1/1000 s (1 мс).
- Поместите камеру с мухой на арену записи и выберите кнопку LIVE. Убедитесь, что камера сосредоточена на кончиках ног, когда муха идет вертикально на полу камеры; ноги советы должны быть в резком фокусе.
- Нажмите запись (Рисунок 2).
- Запись летать пешком, гарантируя, что:
Муха шла по относительно прямой траектории, не касаясь края арены.
Муха шла не менее трех шагов на ногу.
Муха не останавливается во время прогулки.
Расстояние пешком эквивалентно по крайней мере одной длины тела.
ПРИМЕЧАНИЕ: Наличие фона вычитается чисто имеет решающее значение для точной сегментации. Автоматизированный алгоритм фонового вычитания, используемый FLLIT, требует, чтобы изображенная муха двигалась по крайней мере на расстояние по меньшей мере на одну длину тела. - Нажмите Rec Сделано, чтобы остановить запись (Рисунок 2).
- Обрезать видео, чтобы убедиться, что запись включает в себя только прямую прогулку мухи (как описано в шаге 3.6).
- Нажмите Сохранить (Рисунок 2). Сохранить файлы в формате '.mraw' или '.tiff' в соответствующих папках.
ПРИМЕЧАНИЕ: формат '.mraw' обеспечивает большую гибкость для изменения имени файла (при необходимости) и для хранения видео по сравнению с форматом файла '.tiff'.
4. Установка программы FLLIT
ПРИМЕЧАНИЕ: Актуальные инструкции можно найти по адресу: https://github.com/BII-wushuang/FLLIT/blob/master/Compiled/Readme.pdf
- Скачать FLLIT на любой операционной системе
- Скачать FLLIT из следующей ссылки Github: https://github.com/BII-wushuang/FLLIT/archive/master.zip. Извлеките содержимое файла застежки-молнии.
- Скачать наборы выборок данных по следующей ссылке Google Drive: https://bit.ly/2EibvNY. Создайте папку Data под FLLIT-master/Compiled и разместите папки набора данных в этом каталоге данных.
- Установка FLLIT в Ubuntu
- Перейдите в каталог FLLIT/Compiled.
- Нажмите право йгнули и выберите Открытый в Terminal.
- Выдать следующую команду для загрузки и установки библиотек исбыкратии MATLAB для $HOME/MCR:
Баш MCR_2016a.sh - После завершения установки библиотек времени выполнения MATLAB выдали следующую команду для обеспечения того, чтобы исполняемые права были предоставлены FLLIT:
chmod qx FLLIT - Откройте терминал в каталоге FLLIT/Compiled и выдали следующую команду для выполнения FLLIT:
баш run_FLLIT.sh $HOME/MCR/v901
- Установка FLLIT в Windows
- Для 7 и 10-го Домашнего Издания установите Docker Toolbox по адресу:
(https://github.com/docker/toolbox/releases/download/v19.03.1/DockerToolbox-19.03.1.exe). - Для Windows 10 Pro или Enterprise Edition установите Docker Desktop для Windows по адресу: (https://download.docker.com/win/stable/Docker-%20Desktoper.exe).
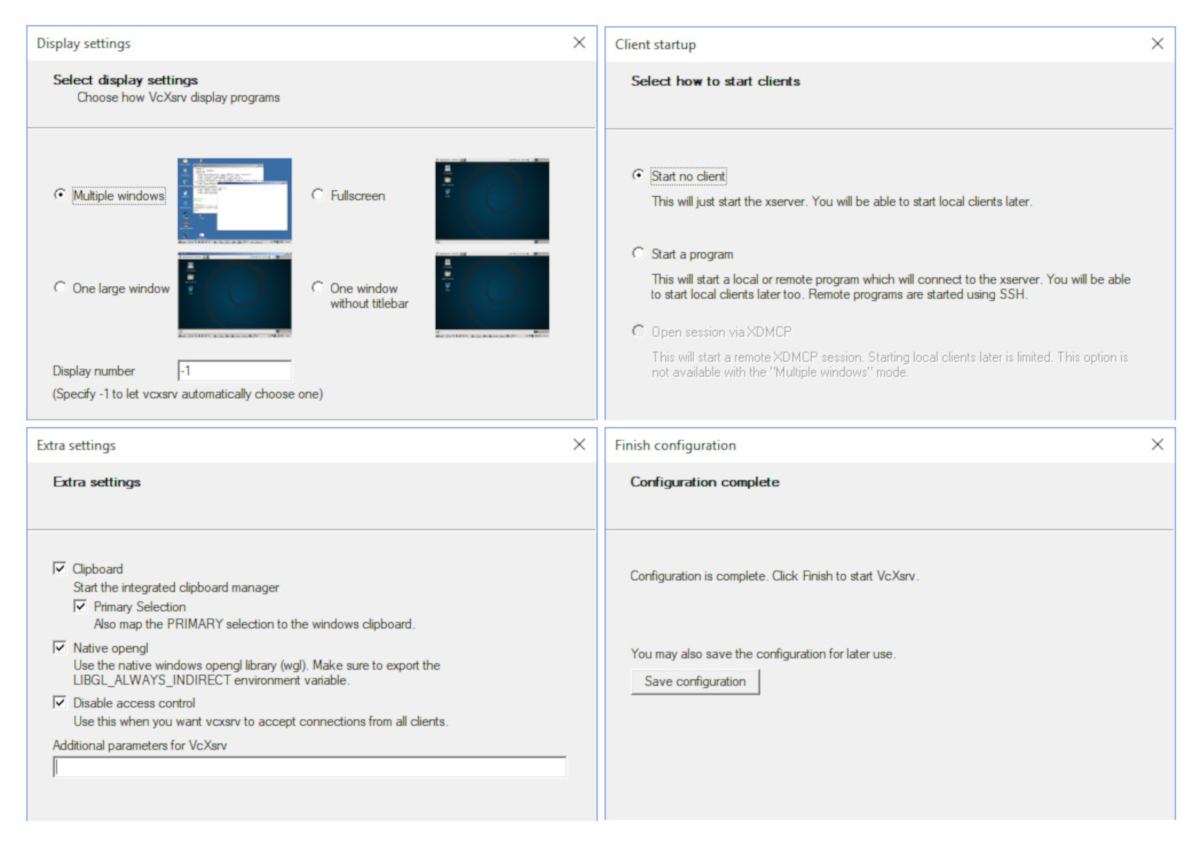
- Для обеспечения выполнения графических приложений в контейнере Docker на Windows сначала установите VcXSrV (https://sourceforge.net/projects/vcxsrv). При запуске VcXsrv настроите настройки, как на рисунке S1.
ПРИМЕЧАНИЕ: Убедитесь, что Docker и VcXsrv работают перед запуском FLLIT. - Двойной клик FLLIT.bat для запуска FLLIT.
ПРИМЕЧАНИЕ: При первом выполнения потребуется некоторое время, чтобы вытащить изображение Docker из Docker Hub.
- Для 7 и 10-го Домашнего Издания установите Docker Toolbox по адресу:
- Установка FLLIT в MacOS
- Скачать Docker Desktop для MacOS в https://download.docker.com/mac/stable/Docker.dmg
- Установите socat, открыв терминал и выпустив следующую команду:
варить установить socat - Начните socat с:
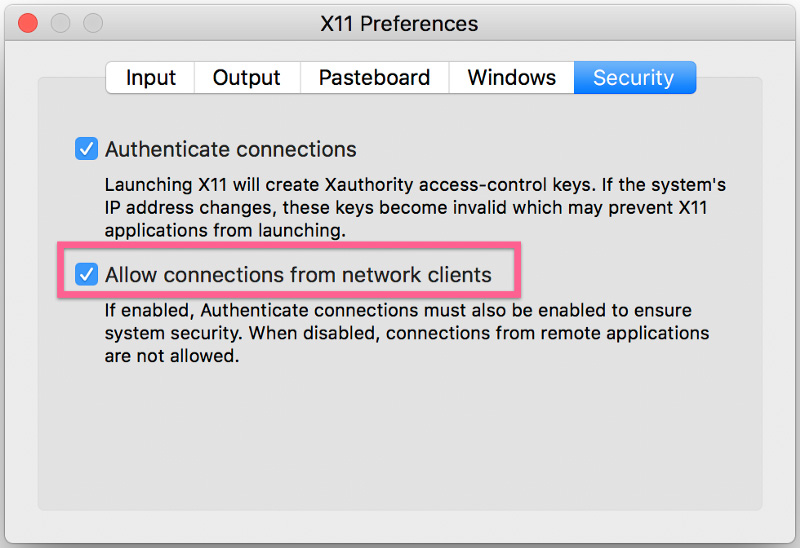
socat TCP-LISTEN:6000,reuseaddr, вилка UNIX-CLIENT: "$DISPLAY" и отречься - Установка X's(https://www.xquartz.org), чтобы обеспечить выполнение графических приложений в контейнере Docker на MacOS. Запустите X'Кварц и измените настройки, проверив подключения Allow от сетевых клиентов во вкладке Безопасности, как показано на рисунке S2.
ПРИМЕЧАНИЕ: Убедитесь, что Докер, Socat и X кварц все работает перед запуском FLLIT. - Откройте терминал в каталоге FLLIT/Compiled и выполните FLLIT со следующей командой:
Баш FLLIT_Mac.sh
ПРИМЕЧАНИЕ: При первом выполнения потребуется некоторое время, чтобы вытащить изображение Docker из Docker Hub.
5. Запуск FLLIT для автоматического отслеживания ног
- Сегментации
- Преобразуйте видео в отдельные файлы TIFF и скопируйте в папку данных FLLIT.
- Выполнить FLLIT (в Ubuntu, правой кнопкой мыши, чтобы открыть FLLIT в терминале).
- Выберите папку, содержащую кадр за кадром TIFF изображения видео для отслеживания и нажмите кнопку Добавить.
- В всплывающем окне выберите 0 для проведения только сегментации ног, или 1, чтобы включить отслеживание ног с сегментацией ног.
- Нажмите Сделано, чтобы инициировать сегментацию и отслеживание выбранного видео.
- Отслеживания
- Чтобы проверить точность отслеживания и выполнения исправлений ошибок (если таковые имеются), нажмите на Select Data Folder. Выберите папку для отслеживания и нажмите Open.
- Нажмите на отслеживание просмотра.
ПРИМЕЧАНИЕ: Проверьте, что режим просмотра остается выбранным при просмотре гусеничных позиций ног. В противном случае любые предыдущие коррективы будут чрезмерно исправлены. - Проверка маркировки для всех ног в первом кадре
ПРИМЕЧАНИЕ: Так как метки ног помещаются в соответствии с положением на экране, если муха идет в вертикальном положении, право стороны мухи помечены как L1 (предногая), L2 (средняя нога), L3 (задняя нога) и левая сторона мухи помечена как R1 (предногая), R2 (средняя нога), соответственно( Если муха идет вверх ногами, вниз ноги этикетки будут правильно аннотированы. - Если нога неправильно помечена и требуется коррекция, нажмите Pause viewing,за которым следует отрегулируйте прогноз (рисунок 3).
- От правой панели возглавлял ногу, чтобы настроить, выберите ногу, которая требует коррекции.
- Дважды нажмите на правильное положение для этой ноги в окне изображения, нажмите на Сохранить, а затем выйти. Чтобы перейти к предыдущему кадру или последующему кадру, нажмите Пауза просмотра следуют вперед и назад, йlt;I и I'gt; кнопки, соответственно(Рисунок 3).
- Чтобы исправить любые неправильно отслеживаемые видео, откройте папку данных видео для повторного отслеживания и выберите ручное инициирование отслеживания.
- Нажмите кнопку отслеживания, которая затем изменит свою метку на Initial.
- Нажмите Отрегулируйте прогноз и исправьте метки ног, дважды щелкая каждую кончик ноги, а затем назначая его правильной меткой для ног. Нажмите Сохранить и выйти.
- Нажмите на резюме, чтобы начать отслеживание.
- Обработка данных и генерация видео
- Нажмите на процесс обработки данных. В всплывающем окне введите количество кадров в секунду (fps), при котором были записаны видео (например, 1000 fps).
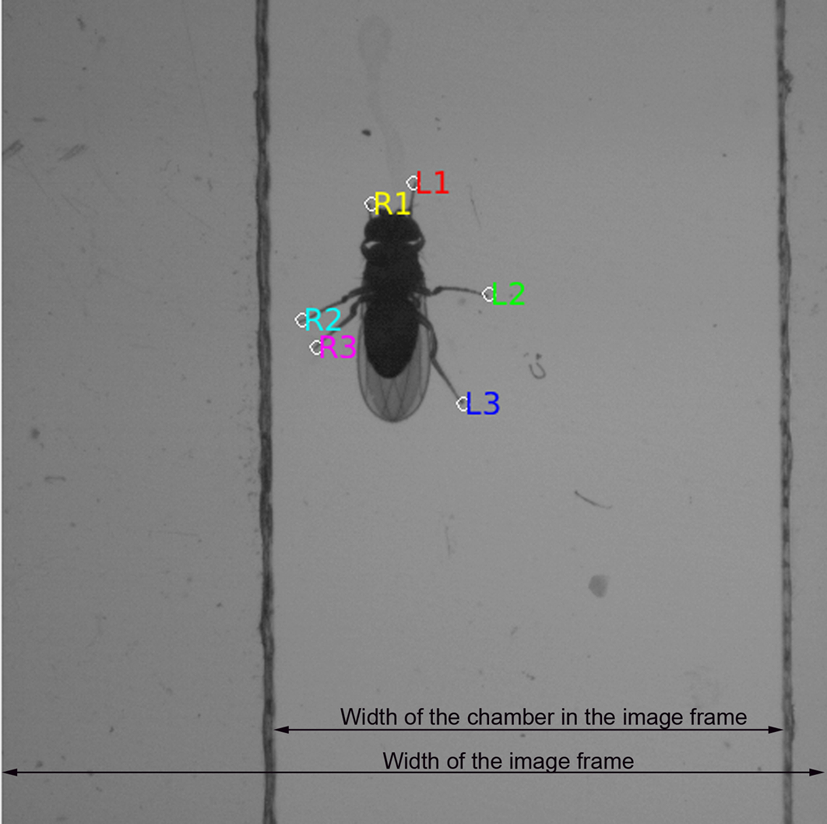
- Используйте следующее уравнение для расчета фактического поля зрения захваченного видео, чтобы параметры походки можно было измерить в миллиметрах:

ПРИМЕЧАНИЕ: Например, если фактический размер камеры составляет 7 мм, ширина рамки изображения составляет 137 мм, ширина камеры в рамке изображения на экране компьютера составляет 81 мм, а ширина поля зрения составила 11,83 мм(рисунок S3). - Чтобы увидеть результаты отслеживания, перейдите в папку отслеживания в папке «Результаты».
- Для создания видео гусеничной мухи, выберите Сделать видео. Видео будет сохранено в той же папке Результатов, что и исходное видео-
ПРИМЕЧАНИЕ: Начало (первый) и конец (последний) кадры видео могут быть выбраны.
- Нормализация до длины тела каждой мухи.
ПРИМЕЧАНИЕ: Поскольку каждая муха может быть немного отличается по размеру, определенные параметры походки должны быть нормализованы до длины тела каждой мухи для облегчения сравнения (например, длина шага может быть больше у больших мух, и короче у меньших мух).- Откройте три неподвижных изображения из видео каждой мухи (обычно первый, средний и последний кадры) с помощью программного обеспечения изображения.
- Уничтожьте каждый кадр изображения до 800% и наметьте самый пиксель головы и задний пиксель живота в средней линии, используя яркий цвет (например, желтый).
- Откройте помеченные изображения в ImageJ.
- Используйте шкалу набора для ввода шкалы соответственно: Установите расстояние в пикселях: 512; Известное расстояние: Фактическое поле зрения (мм) в размере 5.3.2.; Единица длины: мм.
- Нарисуйте прямую линию между помеченными головными и животными наконечниками пикселей, чтобы получить длину тела.
- Откройте шкалу комплекта снова для того чтобы получить значение в известном расстоянии, которое длина тела в mm.
- Возьмите в среднем длина определяется в каждом из трех изображений, чтобы получить средний размер тела в мм.
Результаты
После сегментации ног, отслеживания и обработки данных, FLLIT автоматически генерирует необработанные данные по положениям тела и каждой ноге коготь, 20 параметров походки, 5 участков и гусенивое видео (Таблица 1).
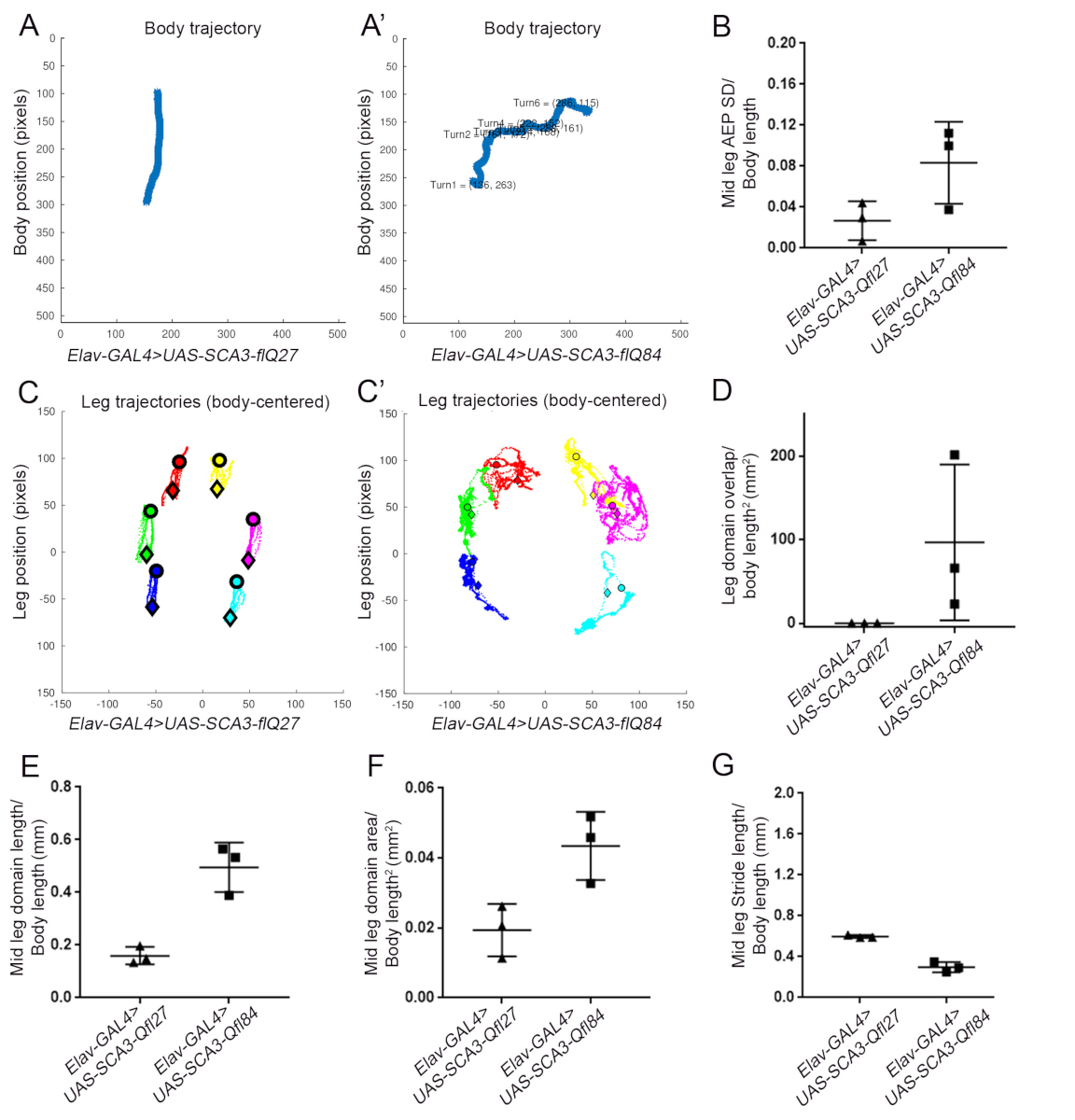
Здесь мы демонстрируем эти анализы с помощью модели fly Spinocerebellar ataxia 3 (SCA3). Паннейрональный драйвер Elav-GAL4 был использован для привода либо в полный рост дикого типа человека SCA3 с 27 глутамина в поли- тракте (UAS-SCA3-fl'27), либо полнометражный мутант человека SCA3 с 84 глутамина в поли- тракта (UAS-SCA3-fl84)11. SCA3 является опечаткой атаксической походки с телом veering, неустойчивое размещение ног и короткие, lurching шаги12,13 (Таблица 2). Чтобы охарактеризовать походку мутантов SCA3 мух и исследовать, являются ли они отображаются аналогичные походки, что и человеческие пациенты, мы проанализировали соответствующие параметры походки, генерируемые FLLIT, а именно: Количество поворотов тела, регулярность следа, перекрытие домена ног и размеры, и длина шага ноги(Таблица 2).
Мы обнаружили, что SCA3-No84 мух и продемонстрировали больше поворотов(Рисунок 4A,A'),неустойчивое размещение ног, как выставлено на низкой регулярности следа (увеличенные стандартные отклонения AEP14) (Рисунок 4B), увеличение перекрытия домена ног(Рисунок 4C-D), увеличенные домены ног по длине и области(Рисунок 4E,F), и уменьшилась длина шага(рисунок 4G).
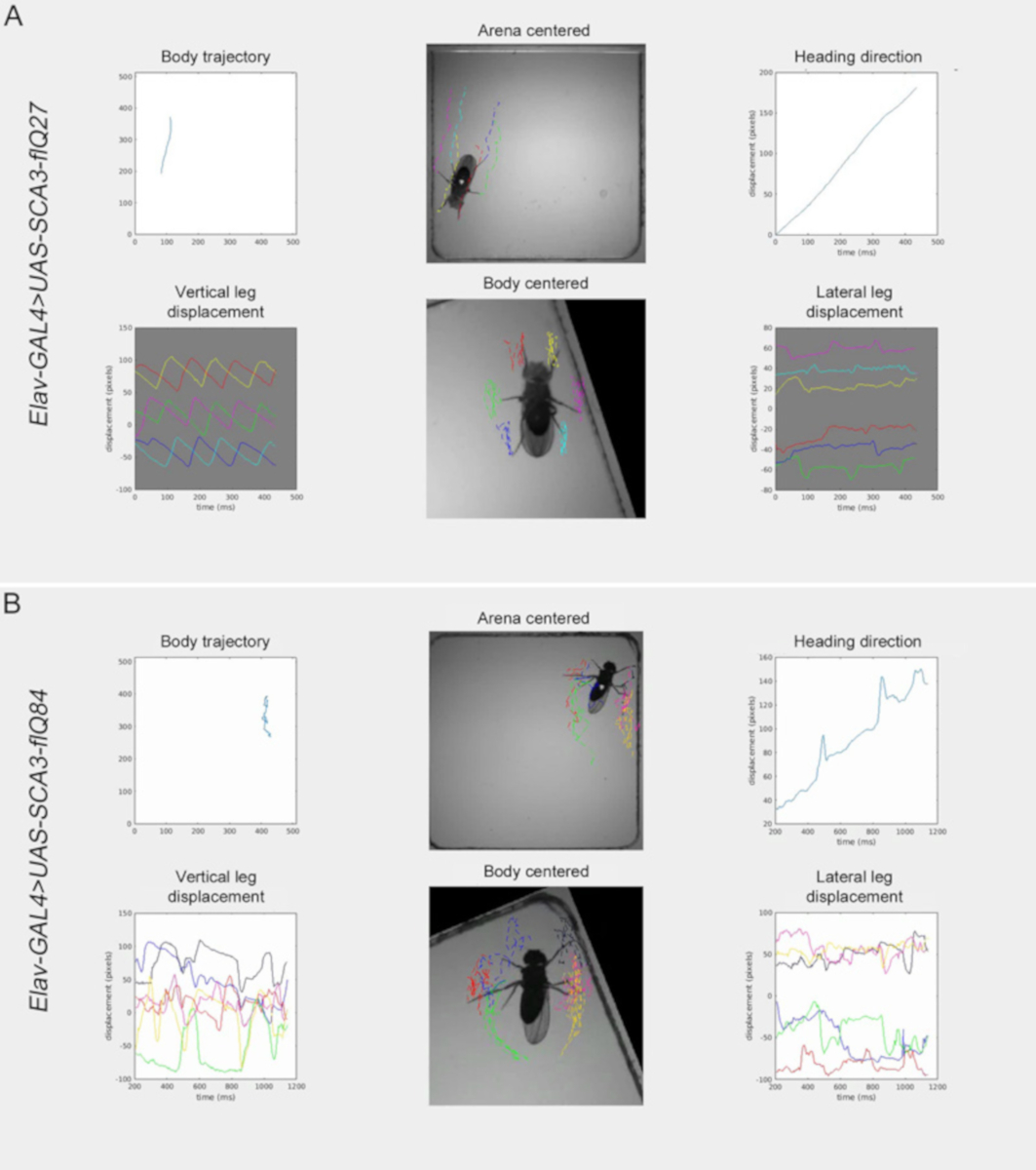
FLLIT также генерирует видео, показывающее гусеничную муху и ноги в центре арены и тела в центре взглядов, траектории тела и направления движения, а также вертикальные и боковые смещения каждой ноги(рисунок 5). Гусеничные видео позволяют бок о бок сравнения движений ног у разных мух. Представитель видео Elav-GAL4йgt;SCA3-fl'27 (Видео 1) и Elav-GAL4йgt;SCA3-fl'84 (Видео 2) мухи демонстрируют, что по сравнению с Elav-GAL4'gt;UAS-SCA3-fl'27 мух (Рисунок 5A), Elav-GAL4 пересекающиеся области ног разных размеров, что свидетельствует о шаткой, атаксической походке.Figure 5B

Рисунок 1. Настройка станции звукозаписи и арены. Записи с фронта (A)и (B) боковые виды. (C) Пример арены, используемой для создания записей летать для отслеживания FLLIT. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 2: Вид активного окна во время записи походки с помощью двойной головной камеры, которая позволяет одновременно записывать двух мух. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 3: Активное окно FLLIT, показывающее панель кнопок и помеченные ноги после сегментации и отслеживания. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 4: Представитель FLLIT генерируемых данных для соответствующих параметров походки мух, выражающих дикий тип (SCA3-fl'27) против мутанта (SCA3-fl'84) SCA3. (A) Количество поворотов в траектории тела. (B) Средненогий след регулярности нормализуется до длины тела. (C-C ') Пройденные области ног каждой ноги. (D) Домен перекрывается между ног. (E) Длина домена средней ноги нормализовалась до длины тела. (F) Средненогий домена нормализованы до длины тела2. (G) Длина шага средней ноги нормализована к длине тела. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 5: Снимок репрезентативного видео, генерируемых FLLIT. (A) Elav-GAL4'gt;UAS-SCA3-fl'27 и (B) Elav-GAL4'gt;UAS-SCA3-fl'84 мух. Please click here to view a larger version of this figure.
{kind=link}

Видео 1: Представитель видео мухи, выражающей пан-нейрональный дикий тип человека в полный рост SCA3(Elav-GAL4'gt;UAS-SCA3-fl'27). Пожалуйста, нажмите здесь, чтобы посмотреть это видео. (Право нажмите, чтобы скачать.)

Видео 2: Представитель видео мухи, выражающей пан-нейрональный мутант человека в полный рост SCA3(Elav-GAL4'gt;UAS-SCA3-fl'84). Пожалуйста, нажмите здесь, чтобы посмотреть это видео. (Право нажмите, чтобы скачать.)

Дополнительная диаграмма 1: Конфигурации для VcXSrv. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Дополнительная рисунок 2: Конфигурация для Xquartz. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Дополнительная диаграмма 3: Изображение, обозначаемые размерами, необходимыми для расчета Поля зрения. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
| Категории | Параметры | Описание | Файл/Участок (если это применимо) |
| Необработанные данные | Положение тела | Позиционные координаты тела центроида в каждом кадре | Первые две колонны CoM.csv |
| Траектория тела | Угол вращения оси тела в градусах (относительно оси y) | Третья колонка CoM.csv | |
| Арена-центре коготь ног Позиции | Позиционные координаты каждого когтей ноги в каждом кадре на основе координат арены | trajectory.csv | |
| Тело-центре коготь ноги Позиции | Позиционные координаты каждого когтей ноги в каждом кадре на основе координат арены | norm_trajectory.csv | |
| Движение тела | Длина тела (мм) | Длина образца животного оценивается в каждом кадре (передняя-самая позиция на голове, чтобы задний-самый положение на крыльях) | bodylength.csv |
| Мгновенная скорость тела (мм/с) | Мгновенная скорость тела (центроид) в образце животного | BodyVelocity.csv; BodyVelocity.pdf | |
| Поворотные точки тела Траектории | Чтобы найти поворотные точки, траектория сводится к по частям линейной кривой с помощью Dougl as'ASPeucker алгоритм, после которого поворот событие определяется как с участием угол линейные сегменты, составляющие упрощенную траекторию | BodyTrajectory.pdf | |
| Индивидуальные параметры шага | Продолжительность шага (ms) | Продолжительность события шага | StrideParameters.csv |
| Период шага (ms) | Продолжительность от события шага к следующему | ||
| Перемещение шага (мм) | Перемещение коготь ноги во время шага события | ||
| Путь шага покрыт (мм) | Полная тропинка, покрытая когтем ноги во время шага события | ||
| Передняя экстремальная позиция (мм) | Положение посадки (относительно тела) когтей ноги в конце шага события | ||
| Задняя экстремальная позиция (мм) | Положение взлета (относительно тела) когтей ноги в начале шага события | ||
| Амплитуда шага (мм) | Перемещение в направлении движения для шага событие | ||
| Линейность стойки (мм) | Определяется как отклонение пути шага от кривой, сглаженной (с интервалом 20 мс) соответствующего переднего и задние экстремальные позиции шаг | ||
| Стрейд растяжка (мм) | Расстояние положения коготь ноги от центра тела в середине события шага | ||
| Движение ног | Скорость ног (мм/с) | Мгновенная скорость каждой ноги | LegSpeed.csv; Gait.pdf |
| Индекс похода | Это измеряет тип координации походки, выставленной (шестиногим) образцом животного во время его движения. Походка индекс 1 соответствует походке штатива, No1 соответствует походке тетрапода, в то время как 0 представляет собой неканоническую походку. В нашей реализации индекс походки получаетскользую среднюю за окном 120 мс | GaitIndex.csv; GaitIndex.pdf | |
| Процент движения | Процент времени, когда нога находится в движении | LegParameters.csv | |
| Средний период шага (ms) | Средняя продолжительность от события шага к следующему | LegParameters.csv | |
| Регулярность следа (мм) | Измеряется как стандартные отклонения задней и | LegParameters.csv | |
| передние экстремальные позиции ноги | |||
| Область домена траектории ноги (мм2) | Область минимального выпуклих корпуса, содержащая всю траекторию ноги в системе отсчета, ориентированной на тело | LegParameters.csv; LegDomain.pdf | |
| Длина и ширина область траектории ног (мм) | Получено через максимальное прогнозируемое расстояние положения коготь на основные (длина домена) и незначительные (ширина домена) основные оси | LegParameters.csv | |
| Пересечение домена ног/перекрытие (мм2) | Пересечение/перекрытие между всеми возможными | LegDomainOverlap.csv | |
| Ширина стойки (мм) | Среднее расстояние между AEP и PEP левой и средней ног | StanceWidth.csv |
Таблица 1: Параметры Gait, генерируемые FLLIT.
| Функция gait | ||||
| Особенности гаитной атаксии Spinocerebellar 3 (SCA3) | Вилинг | Неустойчивое размещение ног и пересечение ног | Перетягивание шагов | Короткие шаги |
| Параметры измерения | Количество событий поворота тела | Регулярность следов | Размер доменов ног, степень перекрытия домена | Длина шага |
| Файл FLLIT | BodyTrajectory.pdf | LegParameters.csv | LegDomainOverlap.csv | StrideParameters.csv |
Таблица 2: Таблица, показывающая отличительные черты походки SCA3 у пациентов с соответствующими параметрами FLLIT и выходными файлами.
Обсуждение
В этой рукописи мы подробно описываем шаги, связанные с использованием FLLIT, автоматизированной программы машинного обучения1, для анализа походки в свободно идущей Drosophila. После отслеживания и анализа данных, FLLIT автоматически генерирует необработанные данные для позиционной информации о теле и ног когти, производя двадцать тела и походки функции, а также видео гусеничный летать, чтобы походка визуализации.
Есть в настоящее время ряд методов для отслеживания движения ног Drosophila и других животных1,2,3,4,14,,15,16, давая исследователям широкий спектр вариантов в зависимости от целей эксперимента. Некоторые из них являются ноги печати на основе подходов, которые являются высокоточными, но которые сообщают только коготь контактные точки с поверхностью обнаружения4,14. С другой стороны, последние подходы глубокого обучения2,3,16 являются весьма универсальными, что позволяет анализ поведения, которые требуют отслеживания суставов ног и других частей тела в любом животном, с оговоркой, что алгоритмы должны сначала быть обучены с пользователем аннотированные наборы данных. Третий тип подхода использует морфологию или изображение-контрастна на основе методов1,15,17, чтобы найти контур каждой ноги, чтобы определить положение коготь., В целом, эти методы плохо справляются с поведением, когда ноги пересекаются (например, во время ухода). FLLIT сочетает в себе второй и третий подходы, используя морфологические параметры для подготовки алгоритма повышения сегментации ног. Это позволяет FLLIT обойти трудоемкую задачу аннотации пользователей для генерации набора обучающих данных, одновременно повышая точность с помощью машинного обучения. Будущие улучшения FLLIT придется иметь дело со случаями, когда ноги пересекаются, чтобы обеспечить анализ более сложного поведения.
FLLIT является надежным для небольших изменений в освещении, разрешение записи и скорость кадра1. Тем не менее, скорость кадра записанных видео не должна опускается ниже 250 кадров в секунду, а FLLIT работает оптимально для видео, записанных на 1000 кадров в секунду. Если есть размытие движения в изображениях, так что это сложно для человека аннотатора, чтобы определить положение ноги, FLLIT не сможет точно определить ноги советы в этих кадрах. В свете этого, важно, чтобы камера была сосредоточена резко на кончиках ног. Чтобы предотвратить артефакты сегментации, арена должна быть тщательно очищена, и не должна быть перемещена во время записи. Для точного фонового вычитания и чистой сегментации, муха должна двигаться по крайней мере одна длина тела во время записи, без паузы. После автоматической сегментации и отслеживания маркировки всех ног необходимо проверить. Если походка мухи не отслеживается или отслеживается неправильно, файл должен быть повторно отслежен вручную с помощью опции ручного инициирования отслеживания (шаг 5.2.7 - 5.2.10).
Нейродегенеративные заболевания и двигательные расстройства все чаще становятся все более распространенными в наших стареющих обществах. Модели нейродегенерации проходят более 2 десятилетий, в течение которых были достигнуты успехи в отношении молекулярных и клеточных аспектов патофизиологии болезни. Тем не менее, конкретные поведенческие последствия болезни были технически трудно оценить. Например, в то время как сообщения о дрожащих движениях в мухе были сделаны18,19, они не были количественно изучены до недавнего времени1. Альпинистский ассеия был полезным и количественным, но относительно грубой мерой6. Этот технический дефицит также затрудняет анализ движения с высоким разрешением в других моделях животных. Появление новых инструментов для поведенческого анализа, следовательно, обещает омолодить поле двигательных расстройств, чтобы позволить исследователям изучить, как молекулярные и клеточные механизмы нервно-мышечных заболеваний приводят к конкретным поведенческим результатам в животных моделях. В этой работе и в нашей предыдущей работе1, мы показали, используя FLLIT, что летать модели SCA3 экспонат гиперкинетической атаксической походки, в то время как PD летать модели демонстрируют гипокинетической жесткой походкой, recapitulating движения отличительные черты соответствующих человеческих заболеваний1. Анализ Gait также позволил нам определить различные нейронные популяции, лежащие в основе конкретных дисфункций движения. Заглядывая вперед, подробный анализ движения, в сочетании с мощными изображениями и функциональными инструментами, доступными в лету, позволит нам получить новое представление о механизмах локомотивной дисфункции, освещая наше понимание нейродегенеративных заболеваний в отношении схемных механизмов.
FLLIT должен быть широко применим для изучения походки в других мелких членистоногих, как это было ранее продемонстрировано, чтобы быть высокоточным для отслеживания движения ног паука1. В то время как мы сосредоточены здесь на использовании детального фенотипирования движения для количественной патогенной походки и ее основной схемы, достижения в отслеживании движения уже революционизировали, и будет иметь постоянное влияние на, понимание нормальной пешеходной координации и походки и ее основных схем, особенно в бесчисленных различных ветвей эволюционного дерева.
Раскрытие информации
Авторам нечего раскрывать.
Благодарности
Авторы хотели бы поблагодарить Мумиту Чаттерджи и Алису Лю за техническую поддержку, а блумингтонский фондовый центр Дрозофилы (Индиана, США) за доступность штаммов Дрозофилы, используемых в этой работе. Эта работа была поддержана Институтом молекулярной и клеточной биологии, Сингапур; Институт биоинформатики, Сингапур; Агентство по научной технологии и научно-исследовательской организации (грант No 15302FG149 для SA и LC); Клинические исследования Флагманская программа (болезнь Паркинсона) в ведении Национального совета медицинских исследований Министерства здравоохранения Сингапура (грант номер NMRC/TCR/013-NNI/2014 в SA), Университет Альберты (запуск гранта LC), и природных наук и инженерных исследований Совета Канады (NSERC) Грант (грант номер RGPIN-2019-04575 к LC).
Материалы
| Name | Company | Catalog Number | Comments |
| Acrylic Sheets | Dama | 1.6 mm thickness, Clear sheets | Singapore, Singapore |
| Clear Glass slides | Biomedia | BMH 880101 | Singapore, Singapore |
| High speed camera | Photron | Fastcam MC2.1 | Tokyo, Japan. A shutter speed of 1 msec or faster is ideal to reduce motion blur of captured images |
| Infra Red LED | Any - Generic from hardware store | 940nm Infrared Light Board | Singapore, Singapore |
| Kimwipe | Kimberly Clark | 34155-01LS | Irving, Texas, USA |
Ссылки
- Wu, S., et al. Fully automated leg tracking of Drosophila neurodegeneration models reveals distinct conserved movement signatures. PLoS Biology. 17 (6), 3000346 (2019).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 19, 1281-1289 (2018).
- Pereira, T. D., et al. Fast animal pose estimation using deep neural networks. Nature Methods. 16 (1), 117-125 (2019).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Lu, B., Vogel, H. Drosophila models of neurodegenerative diseases. Annual Reviews in Pathology. 4, 315-342 (2009).
- McGurk, L., Berson, A., Bonini, N. M. Drosophila as an In Vivo Model for Human Neurodegenerative Disease. Genetics. 201 (2), 377-402 (2015).
- Dionne, H., Hibbard, K., Cavallaro, A., Kao, J. -. C., Rubin, G. M. Genetic reagents for making split-GAL4 lines in Drosophila. bioRxiv. , (2017).
- Cande, J., et al. Optogenetic dissection of descending behavioral control in Drosophila. eLife. 7, (2018).
- Nern, A., Pfeiffer, B. D., Rubin, G. M. Optimized tools for multicolor stochastic labeling reveal diverse stereotyped cell arrangements in the fly visual system. Proceedings of the National Academy of Sciences of the United States of America. 112 (22), 2967-2976 (2015).
- Xie, T., et al. A Genetic Toolkit for Dissecting Dopamine Circuit Function in Drosophila. Cell Reports. 23 (2), 652-665 (2018).
- Warrick, J. M., et al. Ataxin-3 suppresses polyglutamine neurodegeneration in Drosophila by a ubiquitin-associated mechanism. Molecular Cell. 18 (1), 37-48 (2005).
- Ebersbach, G., et al. Comparative analysis of gait in Parkinson's disease, cerebellar ataxia and subcortical arteriosclerotic encephalopathy. Brain. 122 (7), 1349-1355 (1999).
- Stolze, H., et al. Typical features of cerebellar ataxic gait. Journal of Neurology, Neurosurgery and Psychiatry. 73 (3), 310-312 (2002).
- Mendes, C. S., Bartos, I., Akay, T., Marka, S., Mann, R. S. Quantification of gait parameters in freely walking wild type and sensory deprived Drosophila melanogaster. eLife. 2, 00231 (2013).
- DeAngelis, B. D., Zavatone-Veth, J. A., Clark, D. A. The manifold structure of limb coordination in walking Drosophila. eLife. 8, (2019).
- Gunel, S., et al. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. eLife. 8, (2019).
- Isakov, A., et al. Recovery of locomotion after injury in Drosophila melanogaster depends on proprioception. The Journal of Experimental Biology. 219, 1760-1771 (2016).
- Aw, S. S., Lim, I. K. H., Tang, M. X. M., Cohen, S. M. A Glio-Protective Role of mir-263a by Tuning Sensitivity to Glutamate. Cell Reports. 19 (9), 1783-1793 (2017).
- Eberl, D. F., Duyk, G. M., Perrimon, N. A genetic screen for mutations that disrupt an auditory response in Drosophila melanogaster. Proceedings of the National Academy of Sciences of the United States of America. 94 (26), 14837-14842 (1997).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены