
Method Article
Tracciamento delle gambe completamente automatizzato negli insetti in movimento liberamente utilizzando la segmentazione e il tracciamento delle gambe di apprendimento delle funzionalità (FLLIT)
In questo articolo
Riepilogo
Descriviamo protocolli dettagliati per l'utilizzo di FLLIT, un metodo di apprendimento automatico completamente automatizzato per il monitoraggio del movimento degli artigli delle gambe in Drosophila melanogaster e altri insetti in movimento libero. Questi protocolli possono essere utilizzati per misurare quantitativamente i sottili movimenti dell'andatura deatrale in mosche di tipo selvatico, mosche mutanti e modelli di mosca di neurodegenerazione.
Abstract
Il modello Drosophila è stato prezioso per lo studio della funzione neurologica e per comprendere i meccanismi molecolari e cellulari alla base della neurodegenerazione. Mentre le tecniche di mosca per la manipolazione e lo studio di sottoinsiemi neuronali sono diventate sempre più sofisticate, la ricchezza dei fenotipi comportamentali risultanti non è stata catturata con un dettaglio simile. Per essere in grado di studiare i sottili movimenti delle gambe volanti per il confronto tra mutanti richiede la capacità di misurare e quantificare automaticamente i movimenti delle gambe ad alta velocità e rapidi. Di conseguenza, abbiamo sviluppato un algoritmo di apprendimento automatico per il monitoraggio automatico degli artigli delle gambe nei mosche che camminano liberamente, la segmentazione e il monitoraggio degli arti basati su funzionalità di Apprendimento (FLLIT). A differenza della maggior parte dei metodi di deep learning, FLLIT è completamente automatizzato e genera i propri set di training senza la necessità di annotazione dell'utente, usando parametri morfologici incorporati nell'algoritmo di apprendimento. In questo articolo viene descritto un protocollo approfondito per l'esecuzione dell'analisi dell'andatura tramite FLLIT. Descrive in dettaglio le procedure per la configurazione della telecamera, la costruzione dell'arena, la registrazione video, la segmentazione delle gambe e il monitoraggio degli artigli delle gambe. Fornisce inoltre una panoramica dei dati prodotti da FLLIT, che include le posizioni del corpo e delle gambe tracciate non elaborate in ogni fotogramma video, 20 parametri di andatura, 5 grafici e un video tracciato. Per dimostrare l'uso di FLLIT, quantifichiamo i relativi parametri di andatura malatificata in un modello fly di Spinocerebellar atassia 3.
Introduzione
Negli ultimi decenni, le malattie neurodegenerative e i disturbi del movimento sono diventati più diffusi nelle nostre popolazioni che invecchiano. Anche se la nostra comprensione di molte malattie neurodegenerative è avanzata a livello molecolare e cellulare, le caratteristiche fondamentali dei circuiti neuronali colpiti alla base della malattia rimangono poco compresi. Gli strumenti di tracciamento comportamentale sviluppati di recente1,2,3,4 ora ci permettono di studiare le anomalie di movimento nei modelli di malattia animale al fine di identificare la malattia di base della disregolazione molecolare, cellulare e dei circuiti.
Percorsi molecolari coinvolti in molte malattie neurodegenerative sono conservati nel mosca della frutta Drosophila melanogaster, e modelli di malattia di Drosophila hanno contribuito a chiarire i meccanismi fondamentali alla base della neurodegenerazione5,6. Recentemente abbiamo dimostrato che i modelli a mosca di Malattia di Parkinson (PD) e Spinocerebellar ataxia 3 (SCA3) presentano firme di andatura distinte e conservate che assomigliano a quelle delle rispettive malattie umane1,dimostrando che il modello di mosca può essere utilizzato per comprendere i meccanismi del circuito alla base della disfunzione del movimento in specifici disturbi del movimento. Il ricco e in continua crescita arsenale di strumenti nel modello di mosca per la manipolazione mirata e la visualizzazione dei neuroni al singolo gene e al livello a singola cellula7,8,9,10 rende la mosca un modello ideale per sondare il rapporto tra vie della malattia, circuiti neuronali e manifestazione fenotipica comportamentale in vivo. Per consentire un'analisi precisa e automatizzata dell'andatura degli insetti, abbiamo recentemente sviluppato un metodo di apprendimento automatico, Feature L a reddito di LImb segmentazione e T racking (FLLIT)1.
FLLIT è costituito da un algoritmo multifase completamente automatizzato che prima segmenta i pixel delle gambe, che vengono successivamente utilizzati per individuare e tracciare i corrispondenti artigli delle gambe. FLLIT utilizza un algoritmo di potenziamento per la segmentazione, a differenza degli algoritmi di deep learning utilizzati nel recente lavoro2,3. Ci sono alcune somiglianze con le reti neurali convoluzionali in quanto per entrambi i framework, l'estrazione delle funzionalità viene eseguita automaticamente attraverso l'apprendimento dei kernel convoluzionali. Il primo passo in FLLIT consiste nell'utilizzare operazioni morfologiche (bordo e scheletrizzazione) per generare automaticamente campioni di allenamento positivi (pixel sulle gambe) e negativi (sfondo o pixel sul corpo di mosca) con alta sicurezza. Di conseguenza, FLLIT è completamente automatizzato e non richiede campioni di formazione con annotato dall'utente. Usando gli esempi di training precedenti, viene quindi eseguito il training di un classificatore nel framework di un algoritmo di incremento. Un insieme di classificatori deboli è imparato in modo iterativo, con ciascuno costituito da un insieme di kernel convoluzionali per l'estrazione di funzionalità e un albero delle decisioni. Il classificatore finale appreso viene quindi utilizzato per la segmentazione delle gambe ed è in grado di discernere meglio le regioni difficili/campioni duri rispetto alle operazioni morfologiche, producendo una segmentazione complessiva mente molto più accurata per il tracciamento1. Dalle gambe segmentate, localifichiamo le punte e le tracciamo usando l'algoritmo ungherese: abbinando le punte tra i telai in modo che la somma della distanza spostata da ogni punta sia ridotta al minimo. FLLIT è in grado di gestire i casi di occlusione ricordando l'ultima posizione vista (in coordinate centrate dal volo) in modo che una punta della gamba venga recuperata una volta che non è più in occlusione.
In precedenza abbiamo dimostrato che FLLIT può monitorare automaticamente e con precisione i movimenti delle gambe e analizzare l'andatura in una mosca o un ragno non marcato e in movimento liberamente dal video ad alta velocità1; FLLIT dovrebbe quindi essere ampiamente applicabile per il tracciamento delle gambe artrodi. Estraendo set di formazione di apprendimento automatico utilizzando parametri morfologici, FLLIT si allena automaticamente per segmentare e tracciare le gambe degli insetti senza la necessità di un'annotazione manuale laboriosa, che è necessaria per la maggior parte dei metodi di deep learning. FLLIT è quindi completamente automatizzato. Dopo la segmentazione e il tracciamento delle gambe, FLLIT produce automaticamente le posizioni del corpo e delle gambe tracciate non elaborate in ogni fotogramma video, 20 parametri di andatura, 5 grafici e un video tracciato per l'analisi dell'andatura e la visualizzazione dei movimenti dell'andatura. Questo protocollo fornisce una guida dettagliata all'utilizzo di FLLIT.
Protocollo
1. Configurazione del sistema
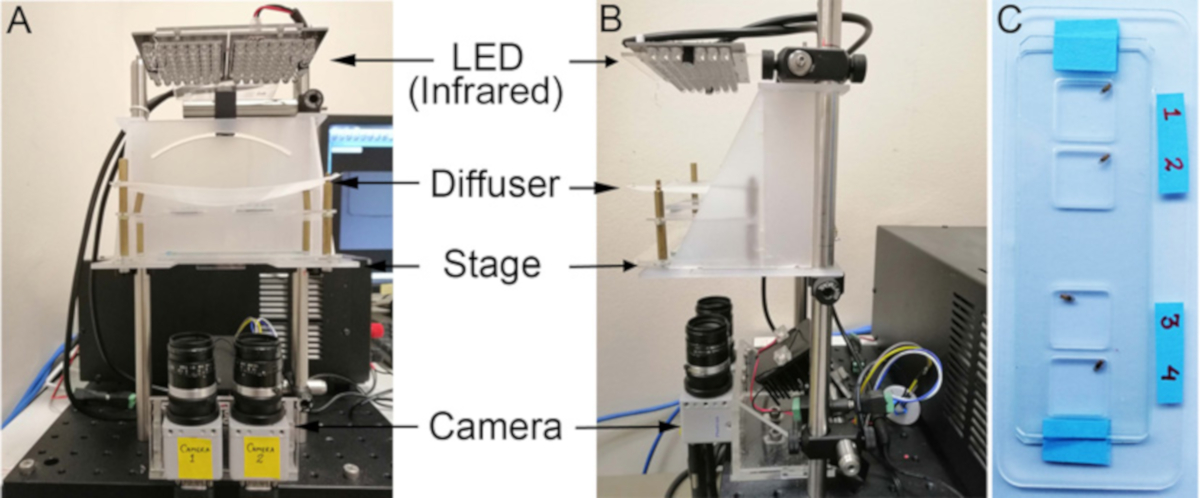
- Assicurarsi che la stazione di registrazione abbia una telecamera ad alta velocità e un palco sopra di esso per contenere la camera dell'arena (Figura 1). Regolare la fotocamera per registrare a un minimo di 250 fotogrammi al secondo (fps), con una velocità dell'otturatore di conseguenza veloce (in questo caso, la registrazione viene eseguita a 1000 fps con una velocità dell'otturatore di 1 ms).
NOTA: verificare che il video sia adatto per il tracciamento assicurandosi che vi sia una minima o nessuna sfocatura di movimento delle gambe in movimento in tutti i fotogrammi. Se la gamba in movimento è così sfocata che un annotatore umano non può rintracciarla, è necessario aumentare la velocità di registrazione della fotocamera e/o dell'otturatore. - Posizionare le luci LED a infrarossi nella parte superiore dello stage con un diffusore (foglio traslucido) tra la fotocamera e il campione (Figura 1A, B).
- Effettuare la camera di registrazione tagliando un foglio acrilico di 1,6 mm di spessore. In questo esperimento, utilizzare un campo visivo di 11 mm x 11 mm. Posizionare la camera tra due vetrini (Figura 1C).
2. Preparazione delle mosche per la registrazione
- Trasferire le mosche da registrare in una nuova fiala alimentare 24 h prima della registrazione.
NOTA: Non utilizzare CO2 (di solito usato per anuserizzare le mosche alla prima raccolta) sulle mosche meno di 24 h prima della registrazione. - Circa 40 min prima della registrazione, trasferire le mosche in fiale vuote e tenere sul ghiaccio per 5-7 min.
- Nel frattempo, pulire l'arena e vetrini di vetro chiaro con acqua e una salvietta.
NOTA: Non utilizzare etanolo per pulire le camere e i vetrini. - Preparare la camera di registrazione. Fissare uno dei microscopici vetrini di vetro sotto la camera con del nastro adesivo.
- Quando le mosche sono state afferrate sul ghiaccio, trasferire una mosca in ogni camera utilizzando un pennello pulito.
NOTA: Sia le mosche maschili che femminili possono essere utilizzate in questa configurazione e, per quanto possibile, le mosche di entrambi i sessi devono essere analizzate per evitare pregiudizi specifici del sesso. - Fissare la camera con un altro vetrino microscopico con nastro adesivo (Figura 1C).
- Mantenere le mosche a camera a temperatura ambiente per 15 - 20 min per l'acclimatazione.
3. Generazione di video per l'analisi FLLIT
NOTA: questo passaggio è specifico della videocamera utilizzata. In questo caso, viene utilizzata una videocamera disponibile in commercio (vedere Tabella dei materiali).
- Accendere la fonte di alimentazione. Attendere che il LED verde per l'alimentazione e il LED arancione per la connessione di interfaccia ethernet per stabilizzare. Accendere l'alimentazione per il LED a infrarossi. Assicurarsi che la tensione rimanga a 12,5 V.
- Aprire l'applicazione Viewer sul sistema del computer connesso.
- Modificare la frequenza fotogrammi di registrazione in 1000 fps. Impostare la velocità dell'otturatore su 1/1000 s (1 ms).
- Posizionare la camera con la mosca sull'arena di registrazione e selezionare il pulsante LIVE. Assicurarsi che la fotocamera sia focalizzata sulle punte delle gambe quando la mosca cammina in posizione verticale sul pavimento della camera; le punte delle gambe dovrebbero essere a fuoco acuto.
- Fare clic su Registra (Figura 2).
- Registrare la mosca che cammina, assicurandosi che:
La mosca camminava in una traiettoria relativamente dritta senza toccare il bordo dell'arena.
La mosca camminava almeno tre passi per gamba.
La mosca non si ferma durante la passeggiata.
La distanza percorsa è equivalente ad almeno una lunghezza del corpo.
NOTA: La sottrazione pulita dello sfondo è fondamentale per una segmentazione accurata. L'algoritmo di sottrazione automatica dello sfondo utilizzato da FLLIT richiede che la mosca immagine si muova almeno una lunghezza del corpo in distanza. - Fare clic su Rec Done per interrompere la registrazione (Figura 2).
- Ritagliare il video per assicurarsi che la registrazione comprenda solo una camminata dritta della mosca (come descritto nel passaggio 3.6).
- Fare clic su Salva (Figura 2). Salvare i file in formato '.mraw' o '.tiff' nelle rispettive cartelle.
NOTA: il formato '.mraw' offre una maggiore flessibilità per modificare il nome del file (se necessario) e per l'archiviazione dei video rispetto al formato di file '.tiff'.
4. Installazione del programma FLLIT
NOTA: le istruzioni aggiornate sono disponibili all'https://github.com/BII-wushuang/FLLIT/blob/master/Compiled/Readme.pdf
- Scarica FLLIT su qualsiasi sistema operativo
- Scaricare FLLIT dal seguente collegamento Github: https://github.com/BII-wushuang/FLLIT/archive/master.zip. Estrarre il contenuto del file zip.
- Scarica i set di dati di esempio dal seguente link di Google Drive: https://bit.ly/2EibvNY. Creare una cartella Dati in FLLIT-master/Compiled e inserire le cartelle del set di dati in questa directory Data.
- Installare FLLIT in Ubuntu
- Passare alla directory FLLIT/Compiled.
- Fare clic con il pulsante destro del mouse e selezionare Apri in Terminal.
- Eseguire il comando seguente per scaricare e installare le librerie di runtime MATLAB per $HOME/MCR:
bash MCR_2016a.sh - Al termine dell'installazione delle librerie di runtime MATLAB, eseguire il comando seguente per assicurarsi che i diritti eseguibili siano concessi a FLLIT:
chmod FLLIT - Aprire un terminale nella directory FLLIT/Compiled ed eseguire il seguente comando per eseguire FLLIT:
run_FLLIT.sh $HOME/MCR/v901
- Installare FLLIT in Windows
- Per 7 e 10a Home Edition, installare Docker Toolbox all':
(https://github.com/docker/toolbox/releases/download/v19.03.1/DockerToolbox-19.03.1.exe). - Per Windows 10 Pro o Enterprise Edition, installare Docker Desktop per Windows all'indirizzo: (https://download.docker.com/win/stable/Docker'%20Desktop'%20Installer.exe).
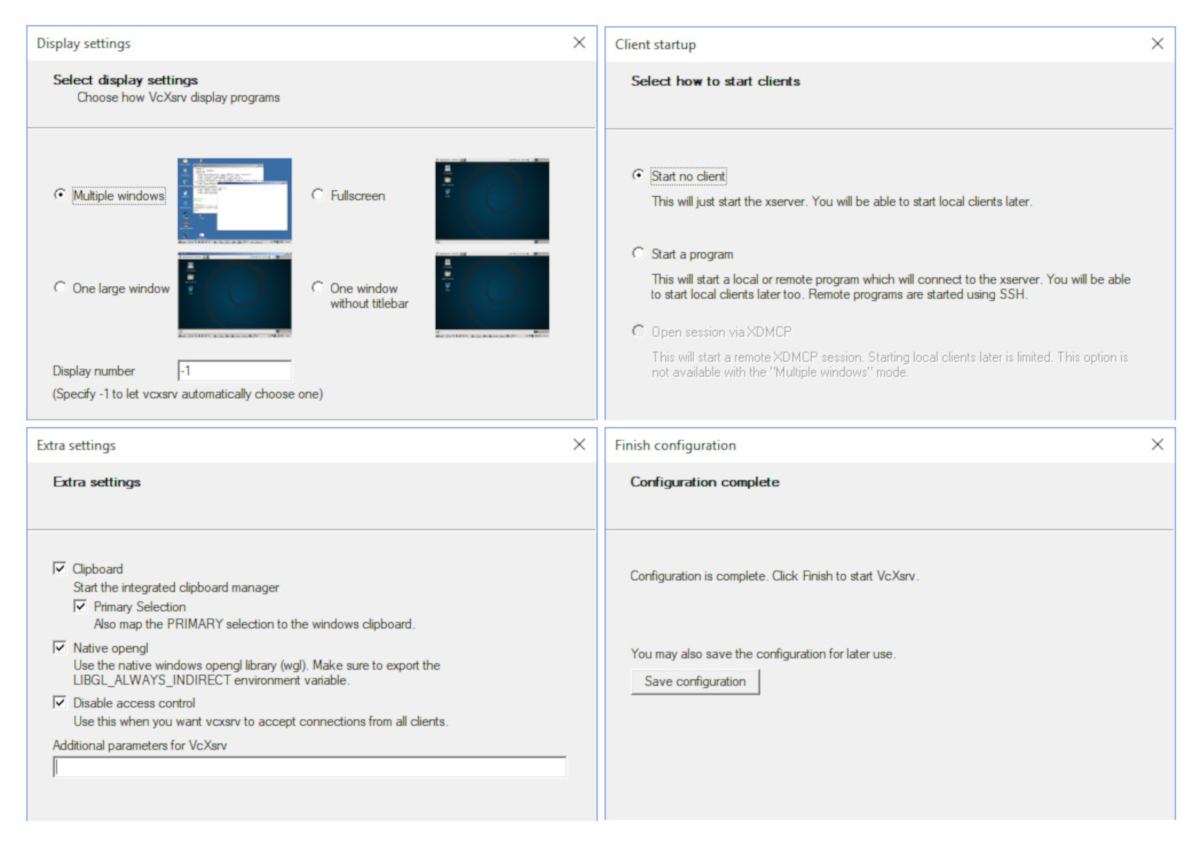
- Per abilitare l'esecuzione di applicazioni GUI in un contenitore Docker in Windows, installare prima VcXSrV (https://sourceforge.net/projects/vcxsrv). All'avvio di VcXsrv, configurare le impostazioni come illustrato nella figura S1.
NOTA: assicurarsi che Docker e VcXsrv siano in esecuzione prima di avviare FLLIT. - Fare doppio clic su FLLIT.bat per eseguire FLLIT.
NOTA: Durante l'esecuzione per la prima volta, ci vorrà del tempo per estrarre l'immagine Docker da Docker Hub.
- Per 7 e 10a Home Edition, installare Docker Toolbox all':
- Installare FLLIT in MacOS
- Scarica Docker Desktop per MacOS allhttps://download.docker.com/mac/stable/Docker.dmg
- Installare socat aprendo un terminale ed emettendo il seguente comando:
brew installare socat - Inizia socat con:
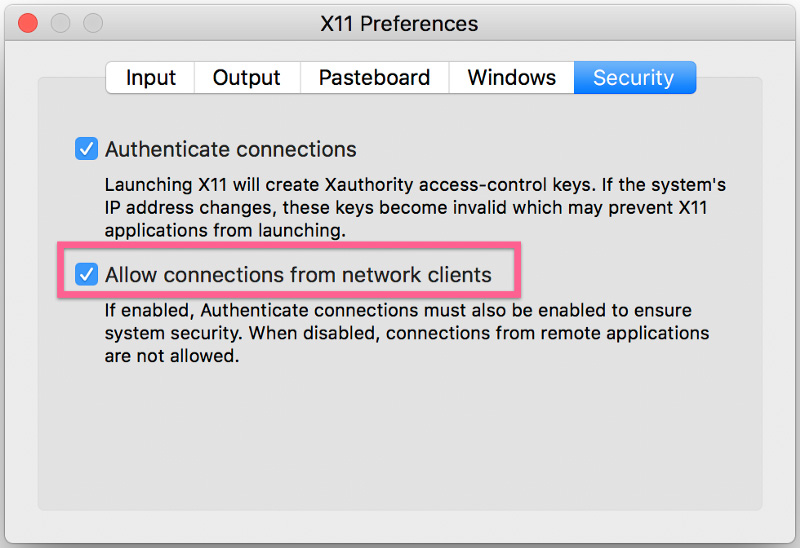
socat TCP-LISTEN:6000,reuseaddr,fork UNIX-CLIENT: "$DISPLAY" & dissito - Installare XQuartz (https://www.xquartz.org) per consentire l'esecuzione di applicazioni GUI in un contenitore Docker su MacOS. Avviare XQuartz e modificare le preferenze selezionando Consenti connessioni da client di rete nella scheda Protezione, come illustrato nella figura S2.
NOTA: assicurarsi che Docker, socat e XQuartz siano tutti in esecuzione prima di avviare FLLIT. - Aprire un terminale nella directory FLLIT/Compiled ed eseguire FLLIT con il seguente comando:
bash FLLIT_Mac.sh
NOTA: Durante l'esecuzione per la prima volta, ci vorrà del tempo per estrarre l'immagine Docker da Docker Hub.
5. Esecuzione di FLLIT per il tracciamento automatico delle gambe
- Segmentazione
- Convertire il video in singoli file TIFF e copiarlo nella cartella dati FLLIT.
- Eseguire FLLIT (In Ubuntu, fare clic con il pulsante destro del mouse per aprire FLLIT in Terminale).
- Selezionate la cartella contenente le immagini TIFF fotogramma per fotogramma del video da tracciare e fate clic sul pulsante Aggiungi.
- Nella finestra pop-up scegliere 0 solo per effettuare la segmentazione delle gambe o 1 per includere il tracciamento delle gambe con la segmentazione delle gambe.
- Fare clic su Fine per avviare la segmentazione e il tracciamento del video selezionato.
- Monitoraggio
- Per verificare l'accuratezza del tracciamento ed eseguire le correzioni degli errori (se presenti), fare clic su Seleziona cartella dati. Selezionare la cartella di cui tenere traccia e fare clic su Apri.
- Fare clic su Visualizza tracciamento.
NOTA: verificare che la modalità visualizzatore rimanga selezionata durante la visualizzazione delle posizioni delle gambe tracciate. In caso contrario, eventuali correzioni precedenti saranno superate. - Controllare l'etichettatura per tutte le gambe nel primo fotogramma
NOTA: Poiché le etichette delle gambe sono posizionate in base alla posizione sullo schermo, se la mosca cammina in posizione verticale, il lato DESTRO della mosca è etichettato come L1 (gamba anteriore), L2 (gamba media), L3 (gamba posteriore) e il lato sinistro della mosca sono etichettati come R1 (gamba anteriore), R2 (gamba anteriore), R3 (gamba posteriore), rispettivamente R3(Figura 3). Se la mosca cammina a testa in giù, le etichette delle gambe saranno correttamente annotate. - Se una gamba è etichettata in modo errato ed è necessaria una correzione, fare clic su Sospendi visualizzazione, seguito da Regola previsione (Figura 3).
- Dal pannello destro con la testa Gamba da regolare, selezionare la gamba che richiede la correzione.
- Fare doppio clic sulla posizione corretta per questa gamba nella finestra dell'immagine, fare clic su Salva, quindi Esci. Per passare al fotogramma precedente o al fotogramma successivo, fare clic su Sospendi visualizzazione seguiti rispettivamente dai pulsanti Avanti e Indietro e I> (Figura 3).
- Per correggere i video tracciati in modo errato, aprire la cartella Dati del video da registrare e selezionare Avvia manualmente il monitoraggio.
- Fare clic sul pulsante Tracciamento, che ne modificherà l'etichetta in Iniziale.
- Fare clic su Regola previsione e correggere le etichette delle gambe facendo doppio clic su ogni punta della gamba e quindi assegnandola con l'etichetta della gamba corretta. Fare clic su Salva ed esci.
- Fare clic su Riprendi per avviare il monitoraggio.
- Elaborazione dei dati e generazione di video
- Fare clic su Processo dati. Nella finestra popup, digitate il numero di fotogrammi al secondo (fps) in cui sono stati registrati i video (ad esempio, 1.000 fps).
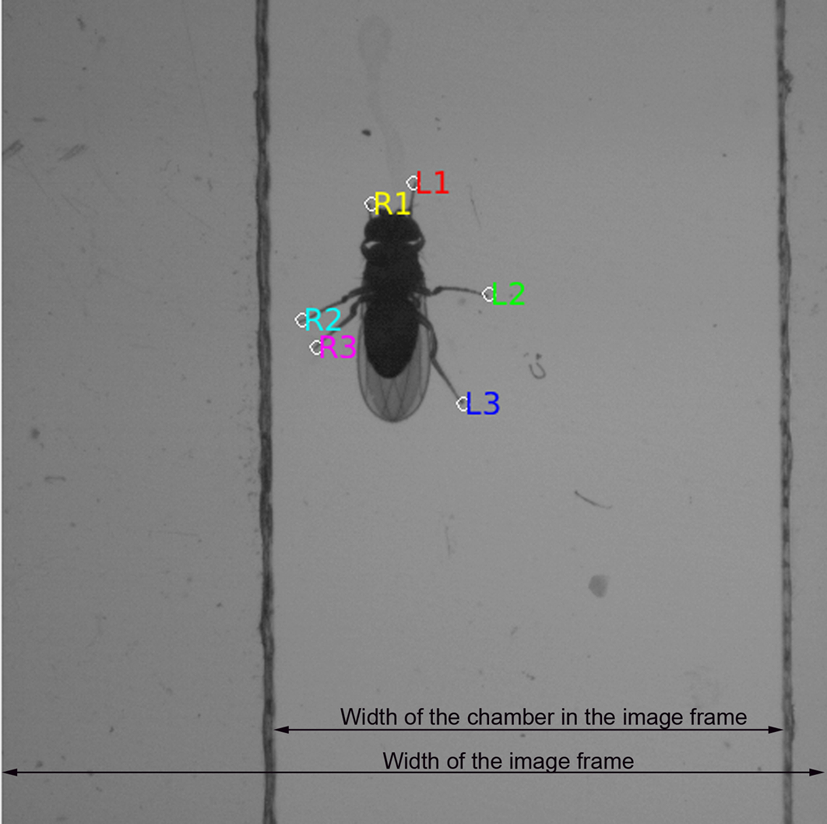
- Utilizzare la seguente equazione per calcolare il campo di visualizzazione effettivo del video acquisito in modo che i parametri di andatura possano essere misurati in millimetri:

NOTA: ad esempio, se la dimensione effettiva della camera è di 7 mm, la larghezza della cornice dell'immagine è 137 mm, la larghezza della camera nella cornice dell'immagine sullo schermo del computer è 81 mm e la larghezza del campo visivo è 11,83 mm (Figura S3). - Per visualizzare i risultati del rilevamento, passare alla cartella Rilevamento nella cartella Risultati.
- Per generare un video del volo tracciato, selezionare Crea video. Il video verrà salvato nella stessa cartella Risultati dei dati video originali analizzati.
NOTA: è possibile selezionare i fotogrammi di inizio (primo) e di fine (ultimo) del video.
- Normalizzazione alla lunghezza del corpo di ogni mosca.
NOTA: Poiché ogni mosca può essere di dimensioni leggermente diverse, alcuni parametri dell'andatura devono essere normalizzati alla lunghezza del corpo di ogni mosca per facilitare i confronti (ad esempio, la lunghezza del passo può essere più lunga nelle mosche più grandi e più breve nelle mosche più piccole).- Apri tre immagini fisse dal video di ogni mosca (di solito primo, medio e ultimo fotogramma) utilizzando il software di immagine.
- Ingrandisci ogni fotogramma dell'immagine all'800% ed etichetta il pixel più anteriore della testa e il pixel più posteriore dell'addome alla linea mediana utilizzando un colore brillante (ad esempio, giallo).
- Aprire le immagini con etichetta in ImageJ.
- Usare Imposta scala per immettere la scala di conseguenza: Imposta distanza in pixel: 512; Distanza nota: campo visivo effettivo (mm) misurato al punto 5.3.2.; Unità di lunghezza: mm.
- Disegnare una linea retta tra i pixel della testa e della punta dell'addome per ottenere la lunghezza del corpo.
- Aprire nuovamente Imposta scala per ottenere il valore in una distanza nota, ovvero la lunghezza del corpo in mm.
- Prendere una media della lunghezza determinata in ciascuna delle tre immagini per ottenere la dimensione media del corpo in mm.
Risultati
Dopo la segmentazione, il tracciamento e l'elaborazione dei dati delle gambe, FLLIT genera automaticamente dati grezzi per le posizioni del corpo e di ogni artiglio delle gambe, 20 parametri di andatura, 5 grafici e un video tracciato (Tabella 1).
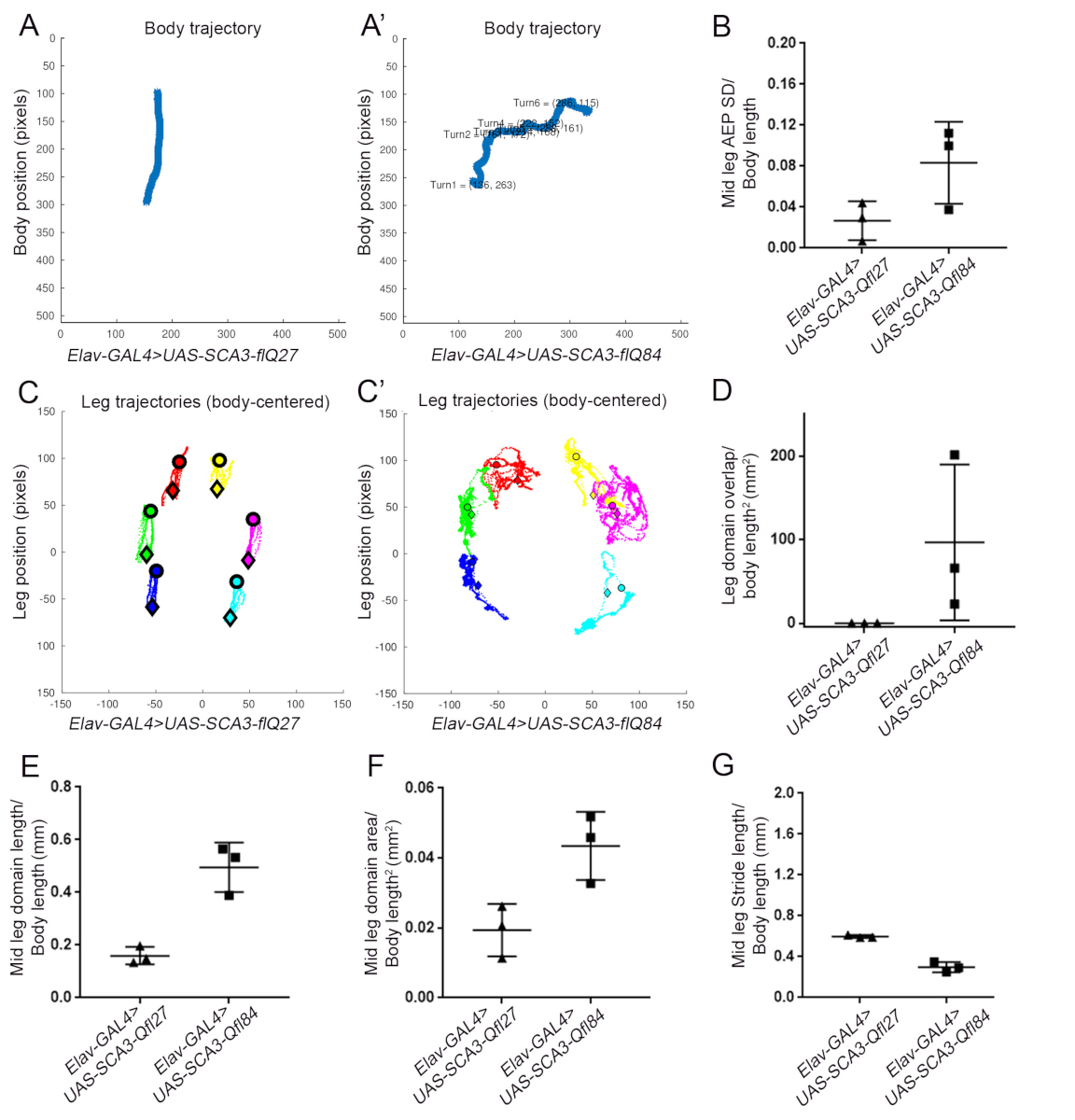
Qui, dimostriamo queste analisi utilizzando un modello fly di Spinocerebellar ataxia 3 (SCA3). Il driver pan-neuronale Elav-GAL4 è stato utilizzato per guidare sia l'intero tipo selvatico sca3 con 27 glutammine nel tratto poliq (UAS-SCA3-flQ27), o un uomo mutante a lunghezza intera SCA3 con 84 glutammine nel tratto poliQ (UAS-SCA3-flQ84)11. SCA3 è caratterizzata da un'andatura atassica con viering del corpo, posizionamento irregolare del piede e brevi passi barcollanti12,13 (Tabella 2). Per caratterizzare l'andatura delle mosche mutanti SCA3 e verificare se mostrano un'andatura simile a quella dei pazienti umani, abbiamo analizzato i parametri di andatura rilevanti generati da FLLIT, vale a dire: Numero di giri del corpo, regolarità dell'impronta e dimensioni, sovrapposizione e dimensioni del dominio e lunghezze del passo delle gambe(Tabella 2).
Abbiamo scoperto che le mosche SCA3-Q84 hanno mostrato più turni (Figura 4A, A'),posizionamento irregolare del piede come mostrato dalla regolarità a bassa impronta (deviazioni standard ingrandite dell'AEP14) (Figura 4B), aumento del dominio delle gambe (Figura 4C-D), ingranditi i domini delle gambe in lunghezza e area (Figura 4E,F) e lunghezza del passo ingrandito (Figura 4G).
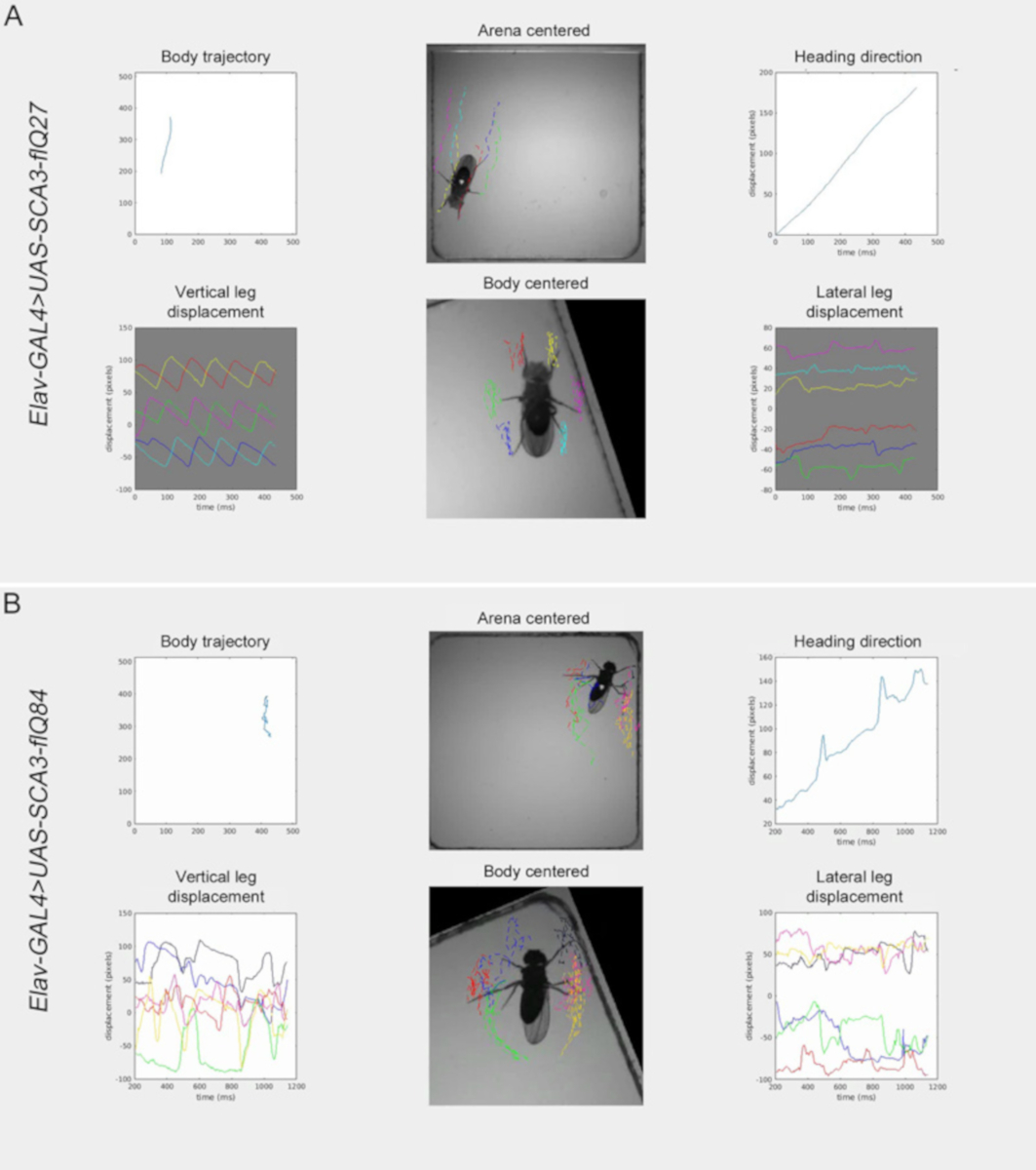
FLLIT genera anche un video che mostra la mosca tracciata e le gambe nelle viste centrate sull'arena e centrate sul corpo, la traiettoria del corpo e la direzione e gli spostamenti verticali e laterali di ogni gamba (Figura 5). I video tracciati consentono il confronto fianco a fianco dei movimenti delle gambe in diverse mosche. I video rappresentativi delle mosche Elav-GAL4>SCA3-flQ27 (Video 1) e Elav-GAL4>SCA3-flQ84 (Video 2) dimostrano che rispetto a Elav-GAL4>UAS-3-flQ27 vola (Figura 5A), Elav-GAL4>UAS-SCA3-flQ84 vola(Figura 5B) intersecando domini di gamba di diverse dimensioni, indicativo di un barcollante, andatura atassica.

come illustrato nella Figura 1. Configurazione della stazione di registrazione e dell'arena. Registrazioni dalleAviste frontali e (B) frontali e(B). (C) Un esempio di un'arena utilizzata per effettuare registrazioni fly per il tracciamento FLLIT. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 2: Visualizzazione della finestra attiva durante la registrazione dell'andatura a mosca utilizzando una fotocamera a doppia testa, che consente la registrazione simultanea di due mosche. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 3: finestra FLLIT attiva che mostra il pannello dei pulsanti e le gambe etichettate dopo la segmentazione e il tracciamento. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 4: Rappresentativo FLLIT-generated data for relevant ghit parameters of flies expresstype (SCA3-flQ27) vs mutant (SCA3-flQ84) SCA3. (A) Numero di giri nella traiettoria del corpo. (B) Regolarità dell'impronta delle gambe medie normalizzata alla lunghezza del corpo. (C-C') Domini di gambe attraversate di ogni gamba. (D) Sovrapposizione del dominio tra le gambe. (E) Lunghezza del dominio mid-leg normalizzata alla lunghezza del corpo. (F) Area di dominio a gamba media normalizzata alla lunghezza del corpo2. (G) Lunghezza del passo della gamba media normalizzata alla lunghezza del corpo. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 5: Istantanea dei video rappresentativi generati da FLLIT. (A) Elav-GAL4>UAS-SCA3-flQ27 e(B) Elav-GAL4>UAS-SCA3-flQ84 vola. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Video 1: Video rappresentativo di una mosca che esprime un tipo selvaggio pan-neuronale che esprime l'uomo a lunghezza intera SCA3(Elav-GAL4>UAS-SCA3-flQ27). Clicca qui per vedere questo video. (Fare clic con il pulsante destro del mouse per scaricare.)

Video 2: Video rappresentativo di una mosca che esprime un mutante pan-neuronale umano a lunghezza intera SCA3(Elav-GAL4>UAS-SCA3-flQ84). Clicca qui per vedere questo video. (Fare clic con il pulsante destro del mouse per scaricare.)

Figura supplementare 1: configurazioni per VcXSrv. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura supplementare 2: Configurazione per Xquartz. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura supplementare 3: Immagine etichettata con le dimensioni necessarie per il calcolo del campo visivo. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
| Categoria | Parametri | Descrizione | File/Stampa (se applicabile) |
| Dati non elaborati | Posizione del corpo | Coordinate di posizione del centroide del corpo in ogni fotogramma | Prime due colonne di CoM.csv |
| Traiettoria del corpo | Angolo di rotazione dell'asse del corpo in gradi (relativo all'asse y) | Terza colonna di CoM.csv | |
| Artiglio per gambe centrato sull'arena Posizioni | Coordinate di posizione di ogni artiglio della gamba in ogni fotogramma in base alle coordinate dell'arena | traiettoria.csv | |
| Artiglio per gambe centrato sul corpo Posizioni | Coordinate di posizione di ogni artiglio della gamba in ogni fotogramma in base alle coordinate dell'arena | norm_trajectory.csv | |
| Movimento del corpo | Lunghezza del corpo (mm) | Lunghezza dell'animale campione stimato in ogni telaio (posizione anteriore-più sulla testa al posizione sulle ali) | bodylength.csv |
| Velocità del corpo istantanea (mm/s) | Velocità istantanea del corpo (centroide) nell'animale campione | BodyVelocity.csv; BodyVelocity.pdf | |
| Punti di svolta del corpo Traiettoria | Per individuare i punti di svolta, la traiettoria viene ridotta a una curva acbinario-lineare utilizzando il algoritmo, a seguito del quale un evento di tornitura viene identificato come coinvolto in un angolo > 50 deg tra due segmenti lineari che si imcostare la traiettoria semplificata | BodyTrajectory.pdf | |
| Parametri di passo individuali | Durata squilicosa (ms) | La durata di un evento passo | StrideParameters.csv |
| Periodo di stride (ms) | La durata da un evento passo all'altro | ||
| Spostamento stride (mm) | Spostamento dell'artiglio della gamba durante un evento passo | ||
| Percorso di stride coperto (mm) | Percorso totale coperto dall'artiglio della gamba durante un evento passo | ||
| Posizione estrema anteriore (mm) | Posizione di atterraggio (relativa al corpo) di un artiglio della gamba alla fine di un evento passo | ||
| Posizione estrema posteriore (mm) | Posizione di decollo (relativa al corpo) di un artiglio della gamba all'inizio di un evento passo | ||
| Ampiezza stride (mm) | Spostamento lungo la direzione del movimento per un evento passo | ||
| Linearità (mm) | Definita come la deviazione del percorso di stride da una curva levigata (a intervalli di 20 ms) e posteriori posizioni estreme del passo | ||
| Allungamento stride (mm) | Distanza della posizione dell'artiglio della gamba dal centro del corpo nel mezzo di un evento passo | ||
| Movimento delle gambe | Velocità gamba (mm/s) | La velocità istantanea di ogni gamba | LegSpeed.csv; Gait.pdf |
| Indice di andatura | Questo misura il tipo di coordinamento dell'andatura mostrato dall'animale campione (a sei zampe) durante la sua mozione. Un'andatura indice di 1 corrisponde a un'andatura treppiede, _1 corrisponde a un'andatura tetrapode mentre 0 costituisce un'andatura non canonica. Nella nostra implementazione, l'indice di andatura è ottenuto da una media mobile su una finestra di 120 ms | GaitIndex.csv; Indice Gait.pdf | |
| Percentuale di movimento | Percentuale di tempo in cui una gamba è in movimento | LegParameters.csv | |
| Periodo di passo medio (ms) | Durata media da un evento passo al successivo | LegParameters.csv | |
| Regolarità dell'impronta (mm) | Misurate come deviazioni standard del posteriore e | LegParameters.csv | |
| posizioni estreme anteriori di una gamba | |||
| Area di dominio della traiettoria delle gambe (mm2) | L'area dello scafo convesse minimo che contiene l'intera traiettoria della gamba nel telaio di riferimento centrato sul corpo | File LegParameters.csv; LegDomain.pdf (dominio) | |
| Lunghezza e larghezza del dominio della traiettoria della gamba (mm) | Ottenuto attraverso la distanza massima prevista delle posizioni degli artigli sul maggiore (lunghezza del dominio) e minore (larghezza dominio) assi principali | LegParameters.csv | |
| Intersezione/sovrapposizione del dominio delle gambe (mm2) | L'intersezione/sovrapposizione tra ogni possibile | LegDomainOverlap.csv | |
| Larghezza stancea (mm) | Media della distanza tra l'AEP e il PEP delle gambe sinistra e media | StanceWidth.csv (larghezza) |
Tabella 1: parametri di andatura generati da FLLIT.
| Funzione di andatura | ||||
| Caratteristiche dell'atassia Spinocerebellar 3 (SCA3) | Virando | Posizionamento irregolare del piede e attraversamento delle gambe | Passi agganciati | Brevi passi |
| Parametro di misurazione | Numero di eventi di svolta nel corpo | Regolarità dell'impronta | Dimensione dei domini delle gambe, grado di sovrapposizione del dominio | Lunghezza del passo |
| FLLIT File | BodyTrajectory.pdf | LegParameters.csv | LegDomainOverlap.csv | StrideParameters.csv |
Tabella 2: Tabella che mostra le caratteristiche distintive dell'andatura SCA3 nei pazienti umani con i corrispondenti parametri FLLIT e file di output.
Discussione
In questo manoscritto, descriviamo in dettaglio i passaggi necessari per utilizzare FLLIT, un programma automatico di apprendimento automatico1, per analizzare l'andatura nella Drosophilaliberamente a piedi . Dopo il tracciamento e l'analisi dei dati, FLLIT genera automaticamente i dati grezzi per le informazioni di posizione degli artigli del corpo e delle gambe, producendo venti caratteristiche del corpo e dell'andatura, nonché un video della mosca tracciata per consentire la visualizzazione dell'andatura.
Ci sono ora una serie di metodi per il monitoraggio del movimento delle gambe della Drosophila e di altri animali1,2,3,4,14,15,16, dando ai ricercatori una vasta gamma di opzioni a seconda degli obiettivi dell'esperimento. Alcuni di questi sono approcci basati sulla stampa di piedi, che sono altamente precisi, ma che riportano solo punti di contatto artiglio con la superficie di rilevamento4,14. D'altra parte, recenti approcci di deep learning2,3,16 sono altamente versatili, consentendo l'analisi dei comportamenti che richiedono il monitoraggio delle articolazioni delle gambe e di altre parti del corpo in qualsiasi animale, con l'avvertenza che gli algoritmi devono prima essere addestrati con set di dati annotati dall'utente. Un terzo tipo di approccio utilizza metodi di morfologia o a contrasto di immagini1,15,17 per trovare il contorno di ogni gamba per identificare le posizioni degli artigli. In generale, questi metodi si occupano male di comportamenti in cui le gambe si incrociano (ad esempio durante la toelettatura). FLLIT combina il secondo e il terzo approccio, utilizzando parametri morfologici per addestrare un algoritmo di potenziamento per la segmentazione delle gambe. Ciò consente a FLLIT di ignorare l'attività laboriosa dell'annotazione dell'utente per generare il set di dati di training, migliorando al contempo la precisione tramite l'apprendimento automatico. I miglioramenti futuri a FLLIT dovranno affrontare i casi in cui le gambe si incrociano, per consentire l'analisi di comportamenti più complessi.
FLLIT è robusto per lievi cambiamenti di illuminazione, risoluzione di registrazione e velocità del telaio1. Tuttavia, la velocità dei fotogrammi dei video registrati non deve scendere al di sotto dei 250 fps e FLLIT viene eseguita in modo ottimale per i video registrati a 1000 fps. Se nelle immagini è presente una sfocatura di movimento, in modo tale che sia difficile per un annotatore umano identificare la posizione della gamba, FLLIT non sarà in grado di identificare con precisione le punte delle gambe in quei fotogrammi. Alla luce di questo, è essenziale che la fotocamera sia messa a fuoco nitida sulle punte delle gambe. Per evitare artefatti di segmentazione, l'arena deve essere pulita accuratamente e non deve essere spostata durante la registrazione. Per una sottrazione accurata dello sfondo e una segmentazione pulita, la mosca dovrebbe spostare almeno una lunghezza del corpo durante la registrazione, senza mettere in pausa. Dopo la segmentazione e il tracciamento automatici, è necessario controllare l'etichettatura di tutte le gambe. Se l'andatura a mosca non viene tracciata o tracciata in modo errato, il file deve essere ripercorso manualmente utilizzando l'opzione Avvia manualmente il rilevamento (passaggio 5.2.7 – 5.2.10).
Le malattie neurodegenerative e i disturbi del movimento sono sempre più diffusi nelle nostre società di invecchiamento. I modelli di neurodegenerazione sono stati studiati per più di 2 decenni, durante i quali sono stati fatti progressi per quanto riguarda gli aspetti molecolari e cellulari della fisiofisiologia della malattia. Tuttavia, le specifiche conseguenze comportamentali della malattia sono state tecnicamente difficili da valutare. Ad esempio, mentre sono state fatte segnalazioni di movimenti tremanti nella mosca18,19, questi non erano stati studiati quantitativamente fino a poco tempofa 1. Il saggio di arrampicata è stato un utile e quantitativo, ma misura relativamente grossolana6. Questo deficit tecnico ha ostacolato allo stesso modo l'analisi del movimento ad alta risoluzione in altri modelli animali. L'avvento di nuovi strumenti per l'analisi comportamentale, quindi, promette di ringiovanire il campo dei disturbi del movimento per consentire ai ricercatori di studiare come i meccanismi molecolari e cellulari delle malattie neuromuscolari portano a risultati comportamentali specifici nei modelli animali. In questo articolo e nel nostro lavoro precedente1, abbiamo mostrato utilizzando FLLIT che i modelli fly di SCA3 presentano un'andatura atassica ipercinetica, mentre i modelli di mosca PD esibiscono un'andatura rigida ipocinetica, ricapitolando i segni del movimento delle rispettive malattie umane1. L'analisi dell'andatura ci ha anche permesso di identificare popolazioni neuronali distinte alla base di specifiche disfunzioni del movimento. In futuro, l'analisi dettagliata del movimento, combinata con i potenti strumenti di imaging e funzionali disponibili nella mosca, ci permetterà di ottenere nuove informazioni sui meccanismi della disfunzione locomotoria, illuminando la nostra comprensione delle malattie neurodegenerative rispetto ai meccanismi del circuito.
FLLIT dovrebbe essere ampiamente applicabile per studiare l'andatura in altri piccoli artropodi, come è stato dimostrato in precedenza di essere altamente preciso per il monitoraggio dei movimenti delle gambe di ragno1. Mentre ci concentriamo qui sull'uso della fenotipizzazione dettagliata del movimento per quantificare l'andatura patogena e i suoi circuiti sottostanti, i progressi nel tracciamento del movimento hanno già rivoluzionato, e avranno un impatto continuo sulla comprensione del normale coordinamento e dell'andatura del camminare e dei suoi circuiti sottostanti, specialmente in una miriade di diversi rami dell'albero evolutivo.
Divulgazioni
Gli autori non hanno nulla da rivelare.
Riconoscimenti
Gli autori desiderano ringraziare Moumita Chatterjee e Alice Liu per il supporto tecnico, e il Bloomington Drosophila Stock Centre (Indiana, USA) per aver reso disponibili i ceppi di Drosophila utilizzati in questo lavoro. Questo lavoro è stato sostenuto dall'Istituto di biologia molecolare e cellulare di Singapore; l'Istituto di Bioinformatica di Singapore; l'Organizzazione per la tecnologia scientifica e l'organizzazione congiunta del Consiglio (numero di sovvenzione 15302FG149 a SA e LC); il Clinical Research Flagship Programme (Malattia di Parkinson) amministrato dal Singapore Ministero della Salute National Medical Research Council (numero di sovvenzione NMRC/TCR/013-NNI/2014 a SA), l'Università dell'Alberta (startup grant to LC), e il Natural Sciences and Engineering Research Council of Canada (NSERC) Discovery Grant (numero di sovvenzione RGPIN-2019-04575 a LC).
Materiali
| Name | Company | Catalog Number | Comments |
| Acrylic Sheets | Dama | 1.6 mm thickness, Clear sheets | Singapore, Singapore |
| Clear Glass slides | Biomedia | BMH 880101 | Singapore, Singapore |
| High speed camera | Photron | Fastcam MC2.1 | Tokyo, Japan. A shutter speed of 1 msec or faster is ideal to reduce motion blur of captured images |
| Infra Red LED | Any - Generic from hardware store | 940nm Infrared Light Board | Singapore, Singapore |
| Kimwipe | Kimberly Clark | 34155-01LS | Irving, Texas, USA |
Riferimenti
- Wu, S., et al. Fully automated leg tracking of Drosophila neurodegeneration models reveals distinct conserved movement signatures. PLoS Biology. 17 (6), 3000346 (2019).
- Mathis, A., et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nature Neuroscience. 19, 1281-1289 (2018).
- Pereira, T. D., et al. Fast animal pose estimation using deep neural networks. Nature Methods. 16 (1), 117-125 (2019).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Lu, B., Vogel, H. Drosophila models of neurodegenerative diseases. Annual Reviews in Pathology. 4, 315-342 (2009).
- McGurk, L., Berson, A., Bonini, N. M. Drosophila as an In Vivo Model for Human Neurodegenerative Disease. Genetics. 201 (2), 377-402 (2015).
- Dionne, H., Hibbard, K., Cavallaro, A., Kao, J. -. C., Rubin, G. M. Genetic reagents for making split-GAL4 lines in Drosophila. bioRxiv. , (2017).
- Cande, J., et al. Optogenetic dissection of descending behavioral control in Drosophila. eLife. 7, (2018).
- Nern, A., Pfeiffer, B. D., Rubin, G. M. Optimized tools for multicolor stochastic labeling reveal diverse stereotyped cell arrangements in the fly visual system. Proceedings of the National Academy of Sciences of the United States of America. 112 (22), 2967-2976 (2015).
- Xie, T., et al. A Genetic Toolkit for Dissecting Dopamine Circuit Function in Drosophila. Cell Reports. 23 (2), 652-665 (2018).
- Warrick, J. M., et al. Ataxin-3 suppresses polyglutamine neurodegeneration in Drosophila by a ubiquitin-associated mechanism. Molecular Cell. 18 (1), 37-48 (2005).
- Ebersbach, G., et al. Comparative analysis of gait in Parkinson's disease, cerebellar ataxia and subcortical arteriosclerotic encephalopathy. Brain. 122 (7), 1349-1355 (1999).
- Stolze, H., et al. Typical features of cerebellar ataxic gait. Journal of Neurology, Neurosurgery and Psychiatry. 73 (3), 310-312 (2002).
- Mendes, C. S., Bartos, I., Akay, T., Marka, S., Mann, R. S. Quantification of gait parameters in freely walking wild type and sensory deprived Drosophila melanogaster. eLife. 2, 00231 (2013).
- DeAngelis, B. D., Zavatone-Veth, J. A., Clark, D. A. The manifold structure of limb coordination in walking Drosophila. eLife. 8, (2019).
- Gunel, S., et al. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. eLife. 8, (2019).
- Isakov, A., et al. Recovery of locomotion after injury in Drosophila melanogaster depends on proprioception. The Journal of Experimental Biology. 219, 1760-1771 (2016).
- Aw, S. S., Lim, I. K. H., Tang, M. X. M., Cohen, S. M. A Glio-Protective Role of mir-263a by Tuning Sensitivity to Glutamate. Cell Reports. 19 (9), 1783-1793 (2017).
- Eberl, D. F., Duyk, G. M., Perrimon, N. A genetic screen for mutations that disrupt an auditory response in Drosophila melanogaster. Proceedings of the National Academy of Sciences of the United States of America. 94 (26), 14837-14842 (1997).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati