
Method Article
一方的坐骨神経クラッシュ傷害後のラットにおける運動行動の多因子的評価
要約
坐骨神経クラッシュ傷害後のラットの行動検査用電池を介して運動行動評価のためのプロトコルを提供する。
要約
末梢神経損傷の誘導は、とりわけ修復および疼痛機構の評価のために神経科学において広く使用されている方法である。また、運動障害の研究分野では、ジストニアの遺伝的素因があるDYT-TOR1Aげっ歯類モデルにおいてジストニア様表現型を引き起こす坐骨クラッシュ傷害が採用されている。坐骨神経クラッシュ傷害後に一貫した再現性と同等の結果を達成するためには、標準化された定型的特徴付けに加えて、神経クラッシュを誘導するための標準化された方法が不可欠である。行動テストの特定の品揃えだけでなく、技術的な要件、正しい実行と連続したデータ分析にも注意が払われなければなりません。このプロトコルは、坐骨神経クラッシュ傷害を実行する方法を詳細に説明し、オープンフィールドテスト、CatWalk XT歩行分析、ビームウォーキングタスク、およびラダーラングウォーキングタスクを含むラットの運動障害の評価のための行動テストバッテリーを提供する。
概要
げっ歯類は、複数の生物学的レベルで仮説をテストすることによって、ヒト疾患1、2の理解を深める優れたモデル生物である。げっ歯類モデルの特性評価のための基本的な生物学的レベルの1つは、行動評価によって測定される表現型レベルである。動物モデルや科学的研究の問題に応じて、パーキンソン病やジストニア3、4、5、6の動物モデルなど、幅広い行動側面をカバーするためには、強力で信頼性の高い行動試験用バッテリーの選択が不可欠です。
坐骨神経は、感覚繊維だけでなく、運動と人間の体内で最大の神経です。坐骨神経の傷害は、交通事故や手術など様々な事象から容易に発生する可能性があります7,8 .したがって、坐骨神経損傷を有するげっ歯類モデルを用いた研究活動は、翻訳的に関連する価値がある。ラットからヒトへの神経再生の翻訳的側面は9と批判的に見なされなければならないが、げっ歯類モデルにおける坐骨神経クラッシュ傷害(アキソノメシス)は末梢神経10,11の退化および再生過程を分析するために一般的に用いられる方法である。クラッシュ傷害の場合、神経は完全に切除されない。それは軸索を損傷し、クラッシュ傷害の直後に伝導ブロックをもたらし、続いて回生プロセス4、12、13を行う。
また、ジストニア研究では、一方的坐骨神経クラッシュ傷害は、遺伝的に素因のあるジストニアげっ歯類モデルにおいてジストニア様運動(DLM)を引き起こす確立された方法であり、これはDLM当たり4,14を示さない。末梢神経外傷は、運動および感覚機能15を担う坐骨神経線維に影響を与えることによって感覚運動の統合を妨げていると仮定される。
ここでは、坐骨神経の標準化されたクラッシュ傷害と、オープンフィールドテスト(OFT)、CatWalk XT歩行分析、ビームウォーキングタスク、ナイーブ野生型(wt)ラット(n= 8-9)および一方的な坐骨神経クラッシュ損傷(n=10)の5週間後のwtラットの歩行タスクで構成される運動行動評価のバッテリーの詳細な説明を提供します。OFTは一般的な運動活動に関する情報を提供し、詳細な歩行分析は自動歩行分析システムCatWalk XTによって達成される。ビーム歩行作業は、ビームを交差する時間と足の配置誤差の数を評価することによって、モータの調整を評価するために使用されます。歩行性能解析のために、ラダーラング歩行タスクは、足や足の配置に関する情報と、一定の不規則なラングパターンを持つ水平ラダーラング装置のエラーを提供します。
プロトコル
すべての動物実験は、ドイツのレジエルン・フォン・ウンテルフランケン(ドイツ・ヴュルツブルク)で地元当局によって承認され、動物のケアと使用に関する国際的、国内的、および/または制度的ガイドラインに従って実施されました。
1. 坐骨神経クラッシュ傷害
注:手術全体の間に無菌環境を維持します。必要な機器を使用して手術台を設置します。
- O2(2 L/分)でイソフルラン3.0%の閉じたキャビネットでラットを深く麻酔します。キャビネットからネズミを取り出します。右後肢の広い領域を剃ります。
- ラットを麻酔マスクに入れ、O2(2 L/分)でイソフルラン2.0%で深部麻酔を続けます。後方の足のデジタル間ウェビングをつまんで麻酔の深さを制御します。離脱反射の欠如は、十分な麻酔を示す。
- テープでラットの胴体と両方の後肢を固定します。両後肢を対称的で伸長した位置に置き、足を手術台に平らにします。
- 眼の眼に眼の軟膏を適用して、ドライアイを防ぎます。かき領域の皮膚を消毒剤で消毒します。
- イリウムの坐骨神経座のノッチを検索します。
- 坐骨切りからメスで足の方向に皮膚切開を行います。皮膚切開はできるだけ小さくする必要があります(約1〜2cm)。
- 後肢が固定され、皮膚切開が正しく行われると、大殿筋と上腕二頭筋との間の筋膜内の空洞が「白線」に似ているのが分かる。閉じた超微細止血鉗子(No.5)をキャビティに挿入し、鉗子を広げます。筋膜面は筋肉組織を傷つけずに開く必要があります。
- 皮膚切開を開いたままにするために、筋肉の下にゴムバンドレトラクターを置きます。
- 神経が完全に露出するまで、坐骨神経から周囲の組織や血管をそっと取り除きます。全体の手順の間に神経を伸ばしたり引っ張ったりしないことが重要です。
- 一定かつ再現可能な圧力で非鋸歯状クランプ(超微細止血)で坐骨神経を粉砕します。このためには、クランプを開き、クランプの下顎に神経を置き、クランプを最初の位置に3回10秒間ロックして閉じます。坐骨神経クラッシュの位置は、坐骨神経管の近くに位置し、主坐骨神経束の分裂部位に近い。クラッシュの怪我の後、クランプを慎重に開き直します。坐骨神経のクラッシュ部位は半透明に見える。
- ゴムバンドレトラクターを取り外します。
- 再ソーブル4-0縫合で魅惑的な面切開を閉じます。ボディスキンステープルで皮膚切開を閉じます。
- 手術後24時間ごとに術後の痛みの軽減のためにGV-SOLASガイドライン(5mg /kg体重、皮下注射)に従ってリマジルを適用します。
- 手術のセットアップからラットを取り除きます。ラットが起きるまで、加熱プレート(37°C)に寝具を入れずにきれいなケージにラットを入れます。ネズミをきれいな家のケージに戻します。
- 手術後4~6日で体の皮膚ステープルを取り除きます。
2. オープンフィールドテスト(OFT)
注:ロコモド活動と行動活動はOFTによって分析することができます。
- セットアップ
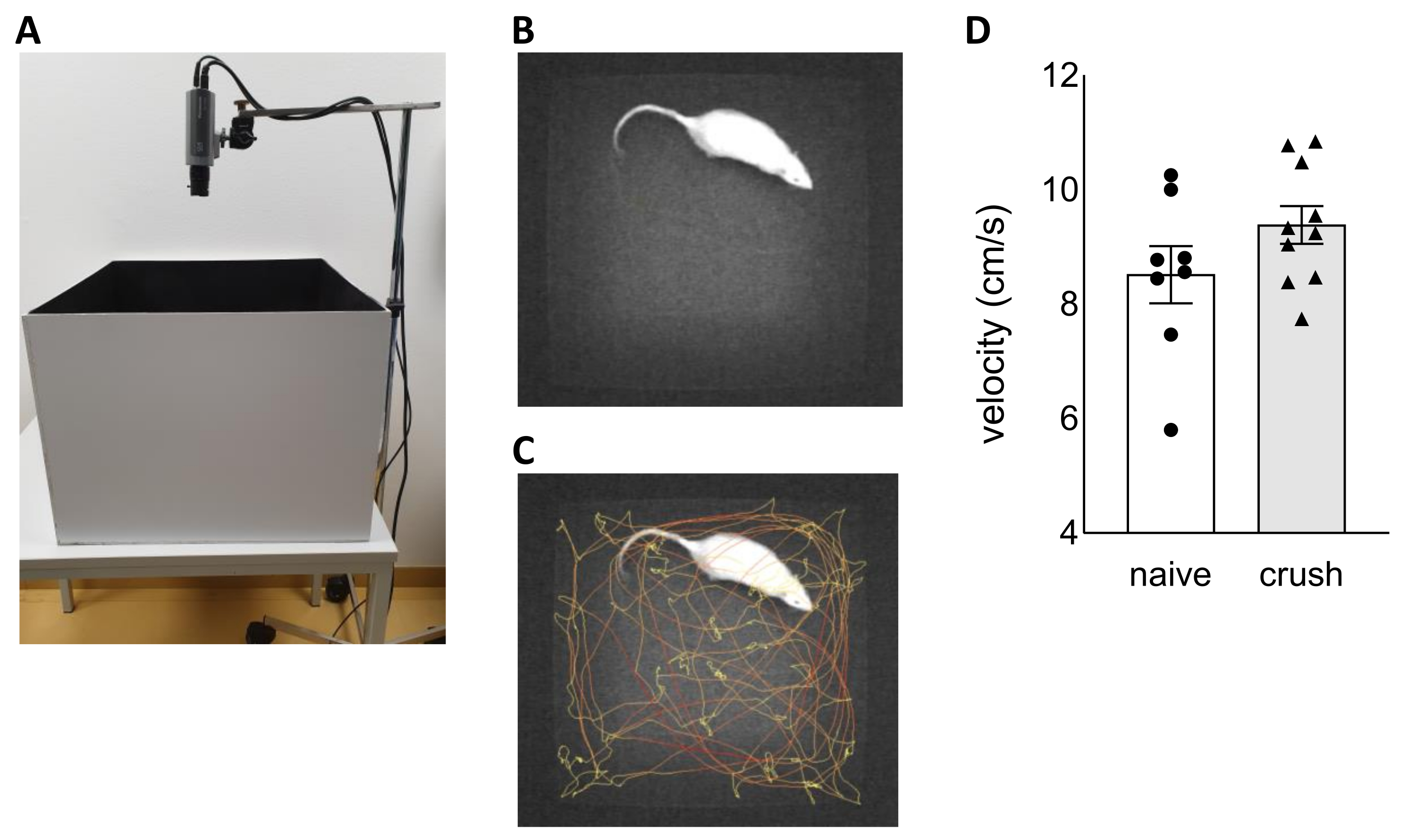
- 暗くて静かな環境でOFT(図1A)を設定します。それは自動ビデオ追跡システムEthoVision XT(コンピュータ、ライセンスを持つソフトウェア)と58.5 cm(長さ)x 58.5 cm (幅)x 45 cm (高さ)を傷つき、きれいな黒い表面を持つアリーナで構成されています。白い動物を追跡する際にコントラストを高めるためには、黒い表面が重要です。
- 査定
- アリーナとカメラを正しい位置に配置します。最適な解像度で開いているフィールド ボックス全体が記録されるカメラを調整します。暗い環境で実験を行います。設定に光が必要な場合は、アリーナでのライトスポット、反射、陰影を避けるために、小さな拡散光を使用してください。アリーナの異なる領域でルクスメーターで照度を測定することにより、等しい光条件を確保します。
- エソビジョン XT ソフトウェアをセットアップします。最も重要な設定は次のとおりです。[実験の設定]で、[ビデオ ソース] の[ライブ トラッキング] を選択し、[トラッキングされた機能] の中心点検出を選択します。アリーナ設定でアリーナのサイズを検証します。データ取得の開始条件を、ラットがアリーナの中央に配置されてから 3 秒後に、総実行時間を[トライアルコントロール設定] で 5 分に設定します。[検出設定] の[メソッド] で [静的減算] を選択します。チェックマーク取得設定でメソッドのビデオを保存します。
- テストアリーナの中央にそっとネズミを置きます(図1B)。
- 取得コントロールの[試用を開始] ボタンを押して、記録を開始します。
- 記録中は、ラットの気をそらさないように、OFTセットアップから離れてください。
- 各試験の後、試験場からラットを静かに取り除き、前に記録されたラットの臭いによって気を散らさないように0.1%酢酸でセットアップをきれいにします。
- データ分析
- EthoVision XT ソフトウェアを使用した OFT のデータ分析については、左側のバーの[分析] セクションに移動し、[結果] タブ (図 1C)の下の [視覚化の追跡] を選択します。次に、必要なパラメータを Excel にエクスポートします。ソフトウェア内で、データ分析のためにさまざまなカテゴリから変数を選択します。この特定の科学的目的のための重要な変数は、「距離と時間」カテゴリの下に「移動距離」と「速度」です。選択したパラメータの統計解析を実行します (図 1D)。
3. キャットウォークXT歩行解析
注:CatWalk XTシステムを介した歩行分析は、動物モデルのフットプリント、スタンス、歩行に関する多くの異なるパラメータを評価するのに役立ちます。ガラスの歩道は緑色の光で照らされ、動物の足跡によって散乱された光は、歩道の下に位置する高速ビデオカメラでキャプチャされます。信号はCatWalk XTソフトウェアで分析することができます。
- セットアップ
- CatWalk XT を使用した歩行解析では、CatWalk システムと対応するソフトウェア (コンピューター、ライセンスを使用したソフトウェア) を使用します (図 2A)。
- データ取得は、緑色のLEDライトを持つCatWalkシステムの歩道の照明に依存するため、暗い条件下で実験を行います。暗い条件下で実験手順を容易にするために、実験室を赤色光で照らす。
- 長さ65cm、幅7cmの計測を行う、定義された歩道を使用してください。しかし、歩道の大きさはラットの大きさによって異なります。歩道をできるだけ大きく設定して、各足にできるだけ多くの足跡を記録します。
- 各実行の足あたり 3 つのフットプリントの最小数をキャプチャします。歩道の長さを定義する際には、開始信号または停止信号が正しく検出されず、実行の完了前または完了後に定義された歩道に残っている場合、ランが準拠として分類されない可能性があるため、ラットの本体と尾を考慮してください。
- 訓練
注:CatWalkシステム用のラットのトレーニングは、セットアップに動物を習慣化し、中断することなく歩道を横断することを学ぶために必要です。適切なトレーニングは、実験評価中の時間を節約し、より良い結果を得るという利点を提供します。トレーニングセッション中にCatWalkシステムのデータ取得を開始すると、ラットは評価条件(ノイズ/ライト)に慣れることができます。- CatWalkシステムのセットアップを開始します。
- 蒸留水と糸くずのない柔らかい布でガラスの歩道をきれいにしてください。実験の開始時と終了時、またはガラスの歩道が汚れている場合は、ガラス洗浄液と糸くずのない柔らかい布を使用して、ガラスの歩道をきれいにします。ガラス洗浄液を使用した後、液体の任意の残留物から歩道を取り除き、動物の気をそらさないようにします。
- 実験設定を選択します。重要なパラメータは実行基準です。[最小実行期間]、[最長実行期間]、[取得する準拠の実行の最小数] の適切な値を設定します。[最大許容速度変動を使用する] ボックスにチェックマークを付けて、値を設定します。実行基準は、トレーニングの最初の 4 ~ 5 日間は無視できます。
- カメラを所定の位置に置き、フォーカスを調整します。最適なカメラ位置を見つけて、適切な長さの歩道と記録された足の最適な解像度を同時に達成します。CatWalk システム上のカメラ位置にラベルを付け、録画間でカメラの配置が同じになるようにします。
- 新しい実験の自動検出を使用して、検出設定を設定します。すべてのフットプリントを最小限のバックグラウンドノイズで検出できることを確認してください。必要に応じて、検出設定を手動で最適化し、緑の強度のしきい値を変更します。実験全体で同じ検出設定を使用します。
- CatWalk システムのコリドーウォールを設定します。廊下の壁は、できるだけラットに近い必要があります。廊下の壁が歩道に平行であることを確認します。
- 歩道の長さを定義する:「歩道を 定義 」アイコンをクリックします。特定の研究プロジェクトに従って、白い長方形の長さと幅のサイズを調整します。 [OK] をクリックします。
- 歩道を調整する:[歩道の調整]アイコン を クリックします。歩道の中央に20 x 10 cmの長方形のキャリブレーションシートを置きます。白い長方形のサイズをキャリブレーションシートに合わせます。 [OK] をクリックします。
- 次に、背景画像をスナップする:歩道が清潔で空であることを事前に確認してください。[ 背景をスナップ ]ボタンをクリックして、背景画像を生成します。
- 実際の実験を開始する前に、少なくとも8日間動物を訓練してください。連続した日のトレーニングをお勧めします。
- 訓練の1日目:ラットがCatWalkシステムに慣れるために、動物が歩道とゴールボックスを自由に探索できるようにします。ネズミが歩道を渡る練習をさせてゴールボックスに入ります。歩道の端またはゴールボックスでラットを拾い上げ、ラットを歩道の出発点に戻します。実験設定に準拠する必要なく、トレーニングの初日には5回の実行をお勧めします。
- トレーニングの2日目:ラットは歩道とゴールボックスを自由に探索することができます。実験設定に準拠せずに5回の実行を推奨します。
- トレーニングの3日目:実験設定に準拠せずに8回の実行をお勧めします。
- トレーニングの4日目:実験設定に準拠せずに10回の実行をお勧めします。
- トレーニングの5日目:10回のランをお勧めします。実験の設定は、心に留めておいてください。中断することなく歩道を横断するラットをやる気にさせる。
- トレーニングの6日目:10回のランをお勧めします。実験の設定は、心に留めておいてください。中断することなく歩道を横断するラットをやる気にさせる。
- トレーニングの7日目:10回のランをお勧めします。最低 3 つの準拠した実行を実行する必要があります。動物がこの目標に到達できなかった場合は、さらに実行を追加します。
- トレーニングの8日目:10回のランをお勧めします。最低 3 つの準拠した実行を実行する必要があります。動物がこの目標に到達できなかった場合は、さらに実行を追加します。
- CatWalkシステムのセットアップを開始します。
- 査定
- 定義された実行基準に従って、データ分析のためにラットごとに 3 つの準拠実行を実行します。評価については、手順 3.2.1 に従ってください。- 3.2.1.8.トレーニングセクションで説明されているように。ラットが最初の3回のラン内で3つの準拠したランに達した場合でも、トレーニング目的でセッションごとに1週間あたり最低6回の実行を行います。
- 複数のタイム ポイントを持つ実験の安定した歩行パターンのために、週に 6 回実行する少なくとも 1 つの (トレーニング) セッションを実行します。実験と検出の設定は、実験全体で一貫しています。
- データ分析
- データ分析の場合は、準拠した実行のみを評価します。非準拠の実行を削除します。
- 必要に応じて、足の分類前に「緑強度しきい値」を確認し、緑強度しきい値を増減します。緑強度しきい値は、すべての動物とすべての実行に対して一貫している必要があります。
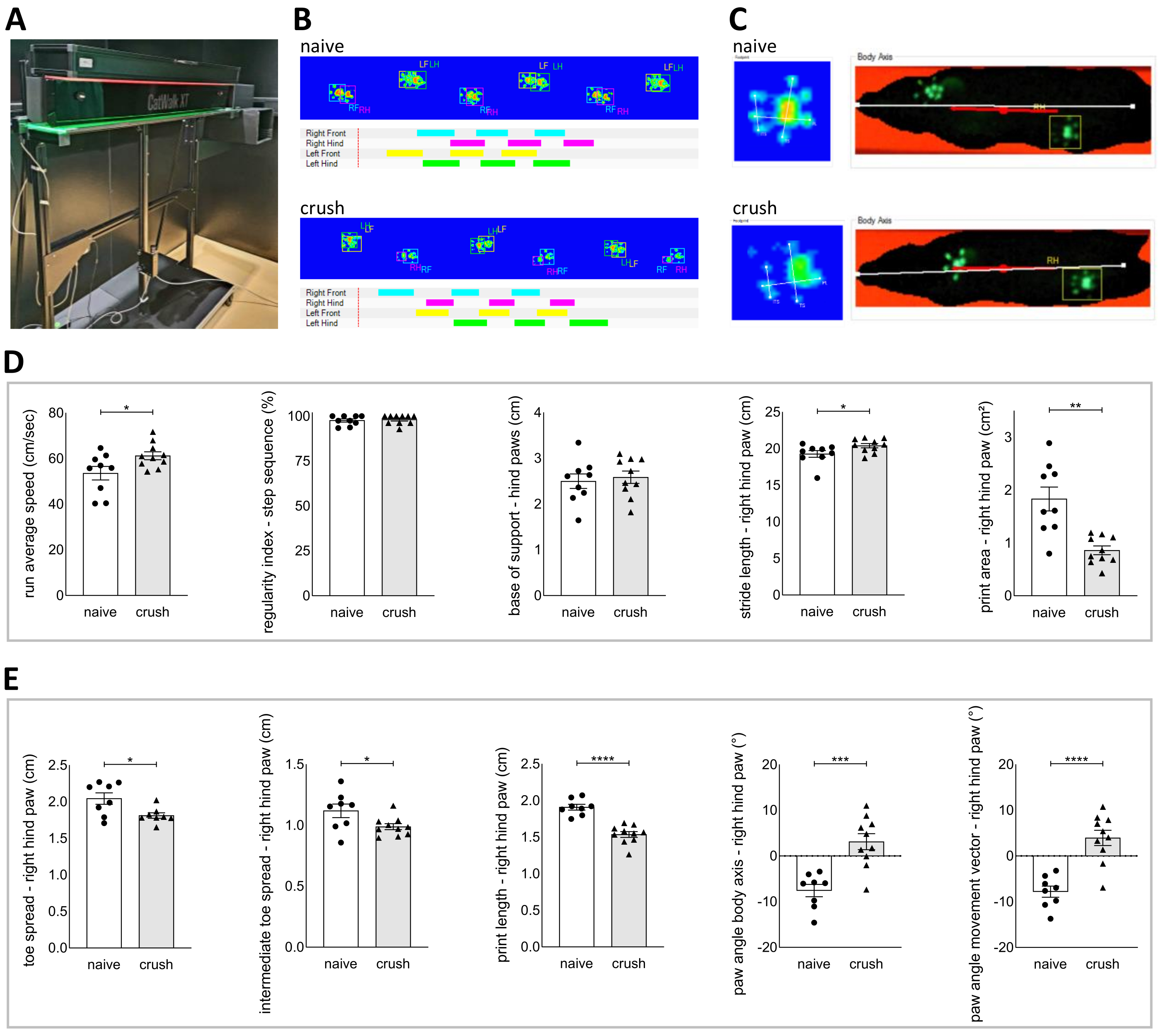
- CatWalk XT ソフトウェアを使用して、足のプリントを自動的に分類します (図 2B)。
- 足の印刷ラベルを手動で確認します。間違った足のプリントラベルを修正し、検出されていない足のプリントのラベルを追加し、ノイズや間違ったラベルを手動で削除します。ビデオを手動で確認する必要がある位置に移動します。間違ったラベル付けされた足のプリントを修正するには、特定の足のプリントの長方形を選択し、[ リセット]をクリックして、同じ四角形を再度選択し、リストから正しいラベルを割り当てます。検出されなかった足のプリントにラベルを付ける場合は、検出されなかった足の周りに長方形を描き、[ 印刷の追加]をクリックして新しく生成された長方形を選択し、リストから正しいラベルを割り当てます。ノーズまたはボディが自動的に印刷されるソフトウェアの場合は、特定のラベルの長方形を選択し、[ 印刷の削除] をクリックします。
- 数値の結果を確認します。数値の結果は、いくつかの基本的なパラメータを示す Excel シートに表示されます。研究の関心に応じて事前定義された特定のパラメータを選択し、通常どおりに統計解析を実行します(図2D)。
- 各フットプリントの詳細については、後足のつま先を分類してください。この解析には 、インタラクティブフットプリント測定モジュールが必要です 。
- 必要に応じて、インタラクティブフットプリント測定解析に適合するグリーン強度しきい値を調整します。緑強度しきい値は、すべての動物とすべての実行に対して一貫している必要があります。
- フットプリント解析のマーカーを手動で設定します。3 つの準拠した実行ですべての後ろ足の印刷を分析します。「つま先スプレッド」を測定するために、最初のつま先の中心から5番目のつま先の中心に線を引きます。2番目のつま先の中心から4番目のつま先の中心に線を引き、「中間つま先スプレッド」を測定します。3 番目のつま先の中心から後足のかかとまでの線を引いて、「手動印刷の長さ」(図2C)を測定します。
- 別シートに表示された「インタラクティブフットプリント測定」の数値結果を確認します。「インタラクティブフットプリント測定」の特定のパラメータを選択し、通常通り統計解析を実行します(図2E)。
4. ビーム歩行作業
注:歩行の赤字はビーム歩行作業によって決定することができる。この特定の研究トピックにおけるビーム歩行タスクの焦点は、運動協調の分析であり、身体運動中の姿勢制御能力として定義される運動バランスの評価ではなく、複数の身体部分からの筋肉活性化を調整する能力として定義される。
- セットアップ
- ビーム歩行作業には、ビーム、スペーサ、テーブル、均一な背景、ビデオカメラを使用します(図3A)。
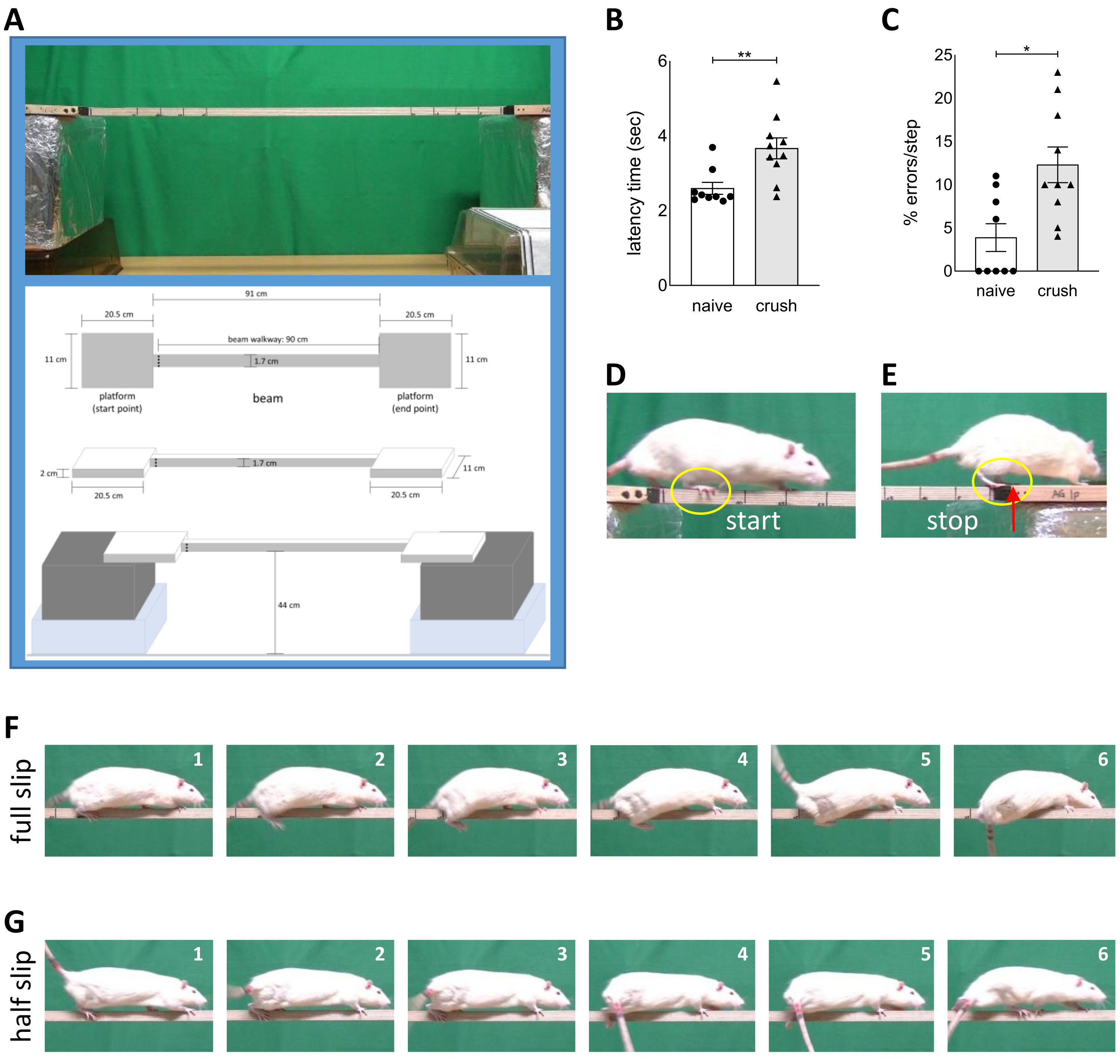
- 長さ90cm、幅1.7cm、高さ2cmの木製ビームを使用してください。長さ20.5cm、幅15cm、梁両端の高さ2cmのプラットフォームをお勧めします。プラットフォームとビームに同じ材料を使用し、プラットフォームとビームの間の障壁を避けます。
- ビームとテーブルの間の距離は少なくとも44cmである。ホームケージのような身近な環境は、ビームプラットフォームの端に配置することができるビームを横切るためにラットを動機づける。
- 訓練
- テーブルの上にスペーサーとホームケージでビームを設定します。
- 7日間動物を訓練します。連続した日のトレーニングをお勧めします。
- トレーニングの1日目
- ビームのスタートプラットフォーム上の1つのホームケージからすべてのラットを配置します。
- ラットは、環境(プラットフォーム/ビーム)を探索してみましょう。
- 1つのラットを尾で注意深く保持し、ラットを軽くビームに押し込んでラットをビームに導きます。
- ラットを少なくとも2回尾で保持してビームを横断するのを助ける。
- ラットは助けを借りずにさらに3回のランのためにビームを横断してみましょう。ラットを観察し、必要に応じて支援を提供します。ラットがビームを横断しなかった場合は、怪我やビームを横断する恐怖の発達を避けるために落下を傍受します。
- すべてのラットに対してこの手順を続行します。
注:時にはラットがビームを横断するために互いに従って、その場合、援助は必要ありません。しかし、ラットを観察し、転倒をインターセプトし、必要に応じて支援を提供することが重要である。
- トレーニング2日目
- ビームのスタートプラットフォーム上の1つのホームケージからすべてのラットを配置します。
- ラットがビームを6回横断してみましょう。
- 必要に応じて、援助を提供し、落下を傍受します。
- 3日目のトレーニング
- ビームの開始プラットフォームに1つのラットを置きます。
- ラットがビームを6回横断してみましょう。
- 必要に応じて、援助を提供し、落下を傍受します。
- トレーニングの4-7日目
- ビームの開始プラットフォームに1つのラットを置きます。
- ネズミはビームを10回横断してみましょう。
- 必要に応じて、援助を提供し、落下を傍受します。
- 訓練の終わりに、ラットは少なくとも3回の実行のために中断することなくビームを横断する必要があります。開始プラットフォーム上でラットを穏やかに押して動きの開始をトリガーすることは許される。
- トレーニングの1日目
- 査定
- テーブルの上にスペーサーとホームケージでビームを設定します。
- ビデオカメラを位置に置き、動物を焦点にしてビームに平行に整列します。ビデオカメラの位置は、記録された動きの最適な解像度を達成するために、動物にできるだけ近い必要があります。ビームと両方のプラットフォームの一部は、記録によってキャプチャする必要があります。
- 記録を開始し、まずセッションと動物を識別します。
- 梁のスタートプラットフォームにラットを置きます。
- ラットは、任意の中断することなく、ビームを3回横断する必要があります。ラットが最初の 3 回の実行内で 3 つの準拠した実行に達した場合でも、継続的なタスクパフォーマンスを実現するために、最低 6 ~ 10 回の実行を実行します。
- 必要に応じて、常に動物を観察し、落下をインターセプトします。
- 作業の後、前に記録されたラットの臭いによって気晴らしを避けるために0.1%酢酸でビームとテーブルをきれいにします。
注:神経クラッシュの傷害後の最初の2週間以内に、ラットは助けなしにビームを横断することができません。したがって、神経クラッシュ傷害後の最初の2週間で6〜8回のアシストを提供する必要があります。第3週から第5週まで、5回のランが支援を受けて実行され、さらに10回のランが支援なしで実行されました。
- データ分析
- データ分析のための無料のビデオ分析ソフトウェアキノベアを使用してください。
- 録画から3つの準拠ランのビデオシーケンスを選択します。このためには、動物の助けを借りずに実行された最初の3つの準拠した実行を選択します。すべてのラットの準拠の実行選択で一貫している。
- 選択した 3 つの準拠した実行の開始時間と終了時間を定義します (図 3D-E)。この設定では、開始点は梁の黒い線でラベル付けされ、黒い線の後ろの最初の後肢の配置は、実行の開始点を定義しました。梁の終点のプラットフォーム上の最初の後肢の配置は、終了タイムポイントを定義します。
- 次に、ラットがビームを通過するのに必要な時間を計算します。ビームを横切る待機時間としてデータをレポートし、通常どおりに統計解析を実行します (図 3B)。
- ソフトウェアのズームとスローモーション機能を使用して、両方の後肢の3つの準拠した実行からステップ数とエラー数を個別にスコア付けします。エラーには、合計フットスリップとハーフフットスリップが含まれます。足の総スリップは、深いスリップが続き、影響を受けた足とビームとの接触の損失を引き起こす足の配置として定義されます(図3F)。ハーフスリップは、ビームとの完全な接触を失うことなく、ビームの側壁から滑り落ちる足と定義されます(図3G)。
- ビームを横切るステップ数(四肢の足のスリップ数x 100%)/同じ四肢のステップ数に対する足のスリップの割合を計算します。フィートスリップの割合としてデータを提示し、通常通り統計分析を実行します (図 3C)。
5.ラダーラング歩行作業
注:ラダーラング歩行タスクは、運動機能、前肢と後肢の両方の配置、およびインターリムの調整を評価することができます。
- セットアップ
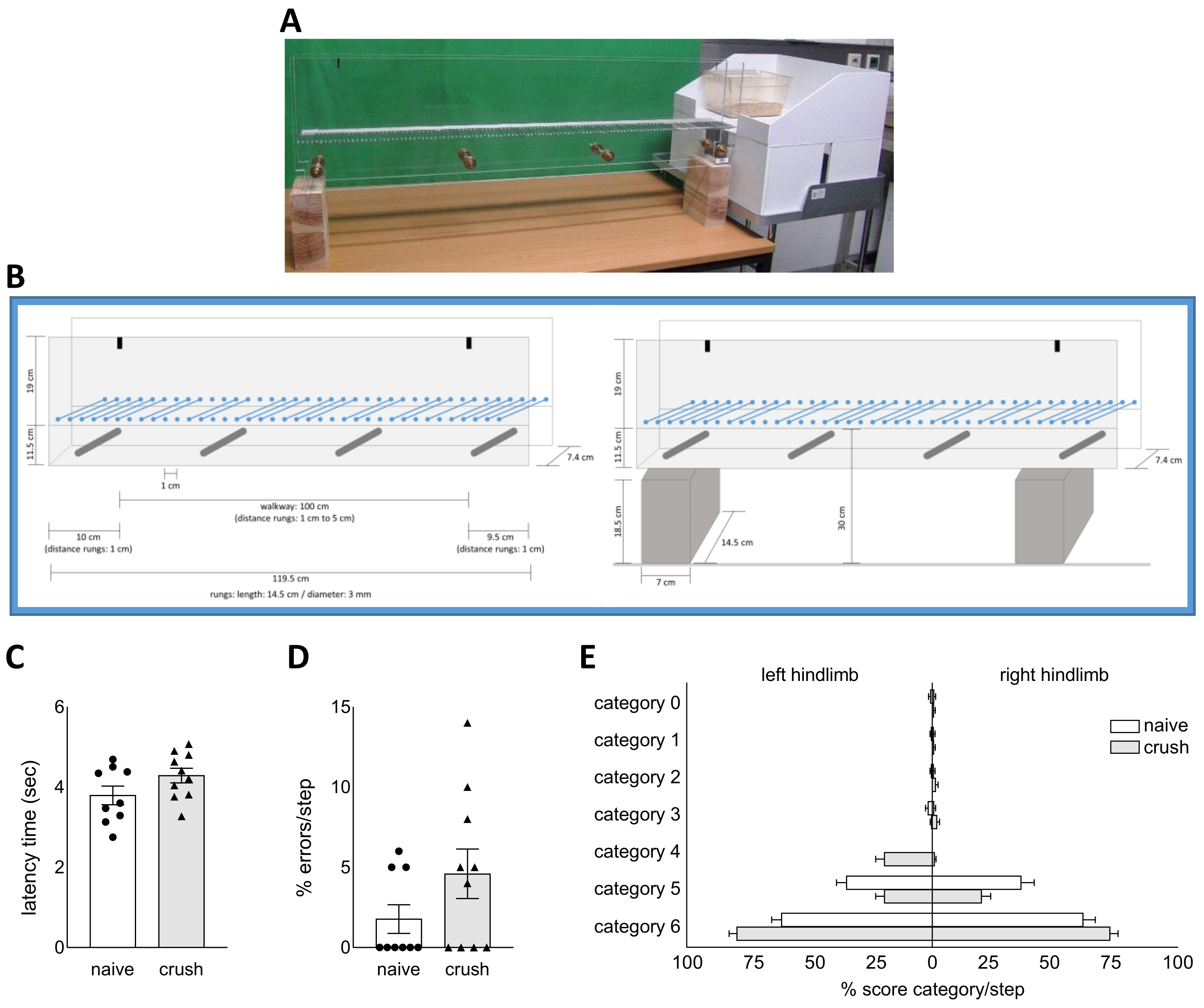
- この動作テストには、ラダーラン装置、スペーサ、テーブル、均一な背景、ビデオカメラを使用します(図4A)。水平ラダーラン装置は金属のラングおよび透明なポリカーボネートの側面から成っている。装置は119.5 cmの長さがあり、幅は7.4 cmに調節される。解析する歩道の長さは100cmです。
- サイドウォールに黒い線で始点と終点にラベルを付けます。1 cm間隔で装置上にラングのプレースホルダを置きます。ラング間の距離1〜5cmの100cmの歩道のためのラングの不規則なパターンを配置します。最初の10cmは、装置の最後の9.5cmで、解析から除外され、1cmの距離を持つラングの規則的なパターンを有する。
- 歩道とテーブルの間の距離を約30cm使用します(図4A-B)。ホームケージのように、装置の最後にゴールボックスや身近な環境は、ラットがはしごラング装置を横断する動機付けになります。
- 訓練
- テーブルの上にスペーサーとゴールボックスを備えたラダーラン装置を設置します。
- 8日間動物を訓練します。連続した日のトレーニングをお勧めします。
- トレーニングの1日目
- 1つのホームケージからすべてのラットをラダーラン装置に置きます。
- ラットが環境(ラダーラン装置/ゴールボックス)を探索してみましょう。
- ゴールボックスの方向にネズミをそっと押し込みます。ゴールボックスに入る際にラットを支援します。ネズミはしばらくの間、ゴールボックスを探索してみましょう。
- すべてのネズミがゴールボックスに入った後。ゴールボックスから最初のラットを取り、再度装置の開始ゾーンにラットを置きます。1つのホームケージのすべてのラットに対して同じ手順を続けます。ゴールボックスの方向にネズミをそっと押し込み、必要に応じてゴールボックスに入る手助けをします。
- ラットが装置を4回横断させる。
- トレーニング2日目
- トレーニングの初日に記載されているのと同じプロトコルを実行します。
- ラットが装置を6回横断させる。
- 3日目のトレーニング
- トレーニングの初日に記載されているのと同じプロトコルを実行します。
- ラットが装置を8回横断させましょう。
- トレーニング4日目
- ラダーラン装置の開始位置に1つのラットを置きます。
- ラットが装置を横切らず、自発的にゴールボックスに入った場合は、後ろからネズミを軽く押して支援を行います。
- ラットが装置を8回横断させましょう。
- トレーニング5-8日目
- ラダーラン装置の開始に1ラットを置きます。
- ラットが装置を横切らず、自発的にゴールボックスに入った場合は、後ろからネズミを軽く押して支援を行います。
- ラットが装置を10回横断させましょう。
- 訓練の終わりに、ラットは最低3回の走行のために中断と援助なしに歩道を横断することができるはずです。ラットに開始ゾーンで穏やかなプッシュを与えて動きの開始をトリガーすることは許される。
- トレーニングの1日目
- 査定
- テーブルの上にスペーサーとゴールボックスを備えたラダーラン装置を設置します。
- ビデオカメラを位置に置き、動物に焦点を合わせて装置に平行に整列させる。ビデオカメラを動物にできるだけ近づけて、記録された動きの最適な解像度を達成し、ラダーラン装置全体が記録にキャプチャされるようにします。
- 記録を開始し、まずセッションと動物を識別します。
- ラダーラン装置の開始ゾーンにラットを置きます。
- ラットは、準拠の走行として資格を得るために、はしごラン装置の100cmの歩道を中断することなく3回横断する必要があります。最初の 3 回の実行でラットが 3 つの準拠の実行に達した場合でも、継続的なタスクパフォーマンスのために最低 10 回の実行を実行する必要があります。
- 作業後、前に記録したラットの臭いによって気を散らさないように、装置とテーブルを0.1%の酢酸で洗浄します。
- データ分析
- データ分析のための無料のビデオ分析ソフトウェアキノベアを使用してください。
- 録画から3つの準拠ランのビデオシーケンスを選択します。データ分析に対して最初の 3 つの準拠の実行を選択します。
- 選択した 3 つの準拠した実行の開始時間ポイントと終了時間を定義します。100 cmの歩道の開始点にラベルを付ける装置の側壁の最初の黒い線の後ろに最初の後肢の配置は、走行の開始時点を定義する。100 cmの歩道の終点にラベルを付ける装置の側壁の第2の黒い線の後ろに第1の前肢の配置は、走行の終点を定義する。
- 開始時間と終了時刻を指定します。次に、歩道を横切る走行時間を計算します。データを、歩路を数秒で通過し、通常通りの統計解析を実行する待ち時間としてレポートします(図4C)。
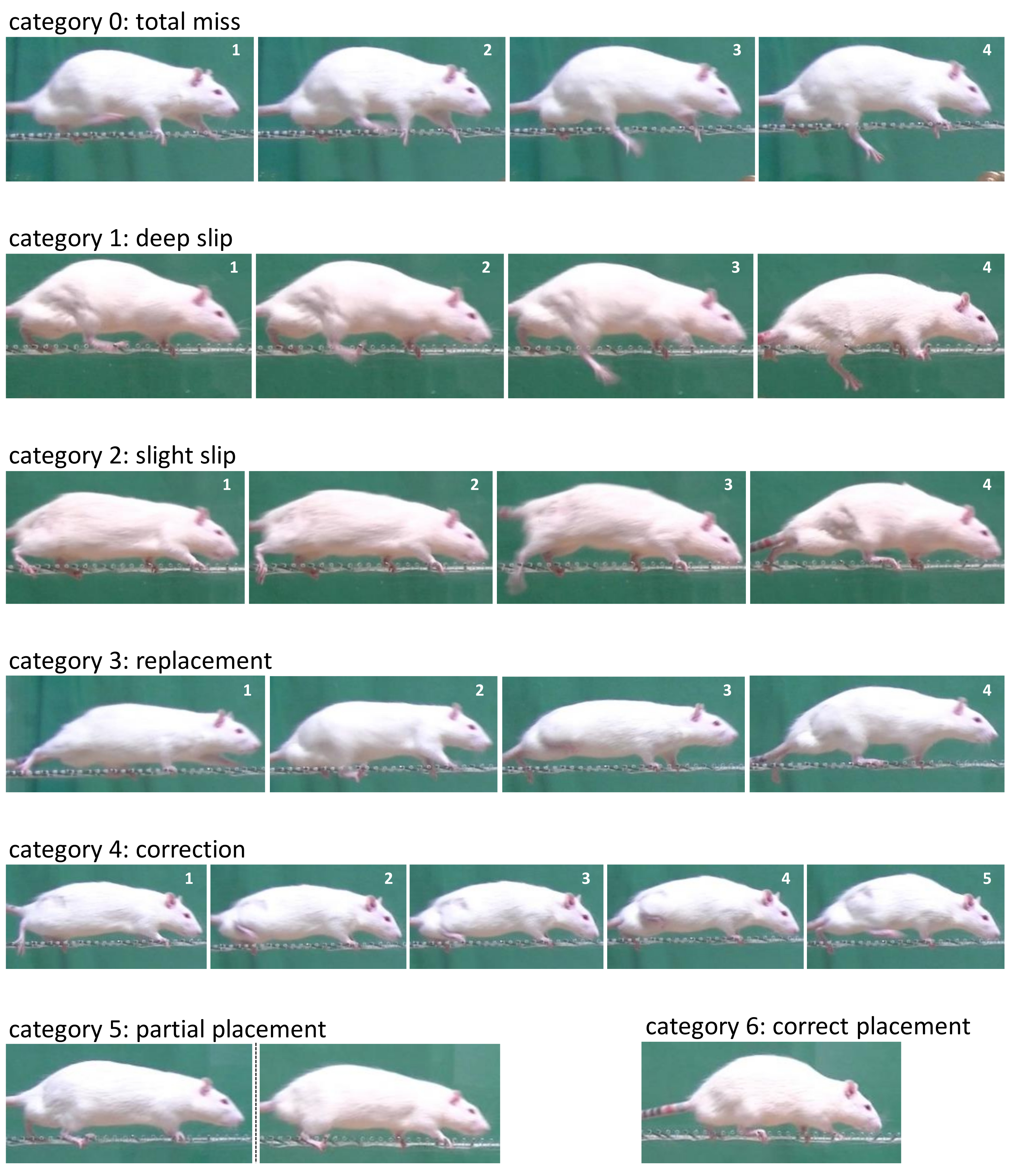
- ソフトウェアのスローモーションまたはフレームごとの機能を使用して、Metzらから7カテゴリスケールで3つの準拠したランをスコア付けする (図5)16,17。各四肢のスケールのカテゴリに応じて、ステップ数とエラー数を個別に決定します。スケールは、(0) 総ミス (1) 深いスリップ (2) わずかなスリップ (3) 置換 (4) 補正 (5) 部分配置、 (6) 正しい配置の各カテゴリーを区別します。発起肢の誤差のみが評価された。最初のエラーによって引き起こされるさらなるエラーは評価されるべきではありません。
- 以下の要件を考慮して、エラー/ステップを計算します。カテゴリ (0) 合計ミス (1) 深いスリップ (2) わずかなスリップ数はエラーとしてカウントされます。エラーの数を、各後肢のステップ数で割り、各実行を個別に行います。各動物と各後肢の3つの準拠したランの平均値を個別に決定し、通常通り統計解析を実行します(図4D)。
結果
5分間OFTの代表的な結果は、手術後5週間の神経クラッシュ傷害が運動活動に影響を及ぼさないことを示している(図1)。
CatWalk XTシステムを用いた歩行解析(図2)は、多くの異なるパラメータを生成します。選択パラメータは、神経潰しの5週間後に神経損傷を負ったwtラットとwtナイーブラットを比較することによって統計的に分析した(図2D)。走り平均速度、歩幅の長さ、および神経損傷(右)後足の印刷領域に対して有意な変化が検出される可能性がある。神経損傷後足のより詳細な分析は、「インタラクティブフットプリント測定」モジュールで行われました。パラメーターつま先の有意な減少は、wtナイーブラットと比較して神経損傷重量ラットにおいて中間足先の広がりおよび印刷長が認められた。また、神経損傷のwtラットをwtナイーブラットと比較すると、足角体軸と足角運動ベクトルが大きく異なる(図2E)。
図3 はビーム歩行タスク評価によって得られた運動協調のデータを示す。神経損傷を受けたwtラットは、5週間の外傷後にwtナイーブラットと比較してビームを横切る待ち時間が有意に長くなったことを示した(図3B)。ビーム歩行作業から追加の読み取りとして、神経損傷した後肢の完全なスリップと半分のスリップがカウントされ、統計分析のエラーとして考慮された。神経損傷(右)後肢のステップあたりのエラーの割合は、wtナイーブラットと比較して神経損傷重量ラットで有意に増加した。
ラダーラング歩行タスクの代表的なデータ(図4)は、ラダーラン装置の歩道を横断する待ち時間(図4C)または神経損傷のステップごとの誤差の割合(図4D)に有意な変化を示さない( 図4D)。神経損傷した後肢のステップあたりの誤差率の分析は、Metzらからの7カテゴリースケールの0から2までのスコアのみを考慮 した。神経損傷後肢と非神経損傷(左)後肢の7カテゴリースケールからのステップごとの全スコアカテゴリの分布を 図4Eに示す。

図1:オープンフィールドテスト中の運動活動の評価 (A) オープンフィールドテストの設定の画像。オープンフィールドテスト中に記録されたビデオから差し引かれた選択された画像は、(B)と(C)追跡を伴わないオープンフィールドアリーナでラットを示しています。(D)5分間のオープンフィールドテスト記録中の速度を、神経クラッシュ傷害の5週間後にwtナイーブラットおよびwtラットで調べた。データは平均±SEMとして示され、統計分析は正規分布データの非対t検定を用いて行われた。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図2:CatWalk XTシステムによる歩行解析 (A)CatWalk XT装置の画像(B)標識した足のプリントを偽色モードで示した印刷物の例と、神経潰し損傷の5週間後のwtナイーブラットおよびwtラットの時間ベースの歩行図を示すタイミング図の例。(c)つま先の広がりを示すつま先の分類(TS)の例としては、中間つま先の広がり(ITS)および印刷長(PL)並びに、神経潰し損傷の5週間後にwtナイーブラットおよびwtラットの体軸(白線)および移動ベクトル(赤線)を示す体軸図の例。(d)神経潰し損傷の5週間後にwtナイーブラットとwtラットを比較する「標準」分類から選択されたパラメータのデータ。(e)神経クラッシュ傷害の5週間後にwtナイーブラットとwtラットを比較する「インタラクティブフットプリント測定モジュール」から選択されたパラメータのデータ。SEM±平均として示されるデータは、正規分布データの非対t検定を用いて行った統計分析、不均一分散を有するウェルチの正規分布データの補正および非正規分布データのマン・ホイットニーU検定による非対t検定を用いて行った。p値<0.05は、0.05 <、**p<0.01、***p<0.001、****p<0.0001として*pラベル付けされた統計的に有意な値として定義されました。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図3:ビーム歩行作業による歩行解析 (A) ビーム歩行タスク設定の図および模式図。ビーム(B)を横切る待ち時間と、ビーム歩行作業中の神経損傷後肢のステップ当たりの足のスリップエラーの割合(C)を、神経クラッシュ傷害の5週間後にwtナイーブラットおよびwtラットで分析した。ビーム歩行タスクの開始時間位置(D)および終了時間位置(E)の代表的な画像。ビーム歩行タスクの完全なスリップ誤差(F)および半スリップ誤差(G)の代表的な画像シーケンス。データは、SEM±平均として示され、非正規分布データのマン・ホイットニーU検定を用いて統計分析を行った。p値<0.05は、0.05<、**p <0.01と表示される統計的に有意であると定義された。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図4:ラダーラング歩行タスクを用いた歩行解析 ラダーラング歩行タスク設定の図(A)と模式図(B)。ラダーラング装置(C)を横断する待ち時間と、ラダーラング歩行作業(D)中の神経損傷後肢のステップ当たりの足のスリップエラー率(D)は、神経クラッシュ傷害の5週間後にwtナイーブラットおよびwtラットで評価した。(E) Metz らの 7 カテゴリスケールに従ったステップごとのスコア カテゴリの分布の割合。神経クラッシュ傷害の5週間後に、ナイーブラットおよびwtラットの左および右後肢のために。SEM±平均データとして示される統計分析は、非正規分布データの非対t検定と非正規分布データのマン・ホイットニーU検定を用いて行った。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図5:Metzらからの7カテゴリースケールに従った各カテゴリーの例示 的表現 はしごラング歩行タスク中. カテゴリ0の右後肢からの代表的な画像シーケンス - 総ミス、カテゴリ1 - 深いスリップ、カテゴリ2 - わずかなスリップ、カテゴリ3 - 置換、カテゴリ4 - 修正、はしごラング歩行作業中。カテゴリ5の代表的な写真 - 部分的な配置とカテゴリ6 - 正しい配置。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
ディスカッション
この行動評価プロトコルは、坐骨神経クラッシュ傷害後のげっ歯類モデルにおける選択された行動試験電池の可能な読み出しと同様に、利点と欠点の概要を提供する。
坐骨神経クラッシュ傷害の比較結果を得るためには、一貫したクラッシュ技術が必須である。鉗子の代わりに非鋸歯状クランプ(超微細ヘモスタット)の使用は、クラッシュの一貫性を改善することができます。同じクランプと同じクラッシュ位置を使用して、同じ神経圧迫を保証します。クラッシュの傷害のためのクランプの排他的な使用および注意してクランプの取り扱いは一貫性を改善する。また、クラッシュ傷害の手順も注意して行う。神経の不要な牽引などの手術中の神経への追加の損傷は、オートマチマチのような望ましくない副作用につながる可能性があります。したがって、2日間以上の鎮痛剤の投与と同様に慎重な神経製剤が推奨される。
運動行動の多因子評価は、様々なレベルでラットの神経クラッシュ傷害後の表現型を特徴付けることができる。OFT、CatWalk XT歩行解析、ビームウォーキングタスク、ラダーラングウォーキングタスクを使用しました。これらの実験には、実験群に対する盲目の実験手順とデータ分析が不可欠である。行動評価の前に、動物は少なくとも30分間試験条件下で試験室に慣れていた。本明細書で適用されるすべての行動試験は、食物または水の剥奪が必要とされないという利点を有する。全ての行動試験で同じ群の動物群を使用した。1日あたり最大2つの異なる行動検査が各動物に対して行われた。行動テストが一定の間隔で行われる場合は、同じ動物の順序で、同じ時刻にテストを行うなど、同等の手順に注意してください。行動分析の更なる重要な側面は、ラットの昼夜サイクルである。昼のサイクル(暗いサイクル)でより自然で高いレベルの活動を得るために、昼夜サイクルを逆転することを検討してください。これは、OFTのような自発的な行動の測定のために特に考慮されなければならない。この実験では、昼夜サイクルの逆転は実施できなかったが、試験条件に十分な順応が確保された。ビームウォーキングタスクとラダーラングウォーキングタスクのための高解像度ビデオには完璧な照明が不可欠です。暗闇の中で実験を行う場合、この高画質に到達することはできません。
歩行の評価には、継続的なタスクパフォーマンスが必要です。継続的なタスクパフォーマンスの最初の重要な側面は、セットアップを横断する動物を説得することです。モチベーションを高めるために、セットアップの最後に小さな食品ペレット(45mg)を置きます。動物が食物ペレットに慣れるためには、ペレットをテストする前に餌を与える必要があります。また、セットアップの最後にゴール ボックスを使用すると便利です。CatWalkの設定には既にゴールボックスが含まれていますが、ラットはゴールボックスに入ることを躊躇することがあります。または、ゴールボックスに小さなケージを追加することもできますが、ラットのホームケージはゴールボックスに収まりません。ラットは、取得前に数分間ケージの中で習慣化してみましょう.さらに、同じホームケージから別のラットをゴールボックスまたはゴールボックス内のケージに入れてもよい。2 番目のラットがボックス内に残っており、ゴール ボックスへの入り口がブロックされないことを確認します。さらに、CatWalkシステムからゴールボックスを取り外し、ラットのホームケージを歩道の端に置き、ラットが各走行後に「ホームテリトリー」に入ることを可能にすることも可能です。ビーム歩行タスクとラダーラング歩行タスクの設定については、セットアップの最後にゴールボックスまたはホームケージを追加することをお勧めします。一貫性を確保するために、CatWalk、ビームウォーキングタスク、およびラダーラングウォーキングタスクは、少なくとも週に1回、6〜10回の実行で実行する必要があります。
すべての分析がこの研究で大きな違いをもたらしたわけではありませんが、遺伝子組み換え動物や治療グループを含めることで、同じ行動検査とグループを区別できる貴重なデータが得られる可能性があると考えてください。
神経クラッシュ傷害は、5分間のOFTで測定されたラットの運動活動に影響を及ぼさなかった。キャットウォークXT歩行分析は、歩行、足、つま先の配置を分析するためのより客観的で敏感なツールです。集中的なトレーニングの後、ラットはCatWalk XT装置の歩道をデフォルトの設定に渡ることを学びます。神経損傷は、歩行路を横断するラットの能力を低下させるものではありません.さまざまなパラメータの自動計算は、客観的にデータを提示します。「インタラクティブフットプリント測定」モジュールを使用することで、さらなる情報を得ることができ、実際に、これらの分析は、神経損傷の有無にかかわらずラットを比較する足の広がり、印刷長および足の角度から体軸までの様々なパラメータに有意な違いをもたらした。
ラットはビーム歩行作業のために容易に訓練することができる。ビームを横切る待ち時間と、神経損傷した後肢のステップあたりの足のスリップ数の違いは、つぶしを負ったラットとナイーブを比較することによって検出された。ビーム歩行作業で神経損傷ラットを分析することの欠点は、ビームの大きさです。坐骨神経クラッシュ傷害後の最初の2週間以内に、ラットはバランスが損なわれるにつれてビームを横切る助けを必要とする。一部のラットはビームを通過することができるかもしれないが、転倒による傷害のリスクは高い。したがって、神経潰し動物は、坐骨神経潰し傷害後の最初の2週間、または必要に応じてより長くビームを横切るのを助けるべきである。しかし、アシストを伴うランと支援なしに実行を比較することは困難です。また、モータバランスはビーム歩行作業によって評価される重要なパラメータである。このパラメータは、神経クラッシュラットモデルに関連しないと考えました。したがって、大渡しらとヨハンソン&オルソンが記述したスコアは使用できず、不完全なビームトラバースを持つ走行はデータ分析18,19のために除外された。
Metzらからの7カテゴリースケールは、前肢と後肢の両方を分析し、はしごラング歩行タスク16、17の間にすべての手足のエラーの異なる重大度レベルを区別することができる。0から2までのカテゴリーを含む最も顕著な誤差を分析することによって、神経損傷を受けたwtラットとナイーブなwtラットを比較する際に、後肢でステップごとの誤差の違いを検出することができなかった。さらに、ラダーラン装置を通過する待ち時間は、神経損傷したwtラットとwtナイーブラットとの間で異ならなかった。ディープラーニングモデルは、自動化されたアプローチを通じて、ラダーラング歩行タスクのデータ分析を改善し、スピードアップすることができます。
神経クラッシュ傷害だけでなく、すべての記述された行動検査は、セットアップの設定とサイズを適応させることによって、マウスに簡単に翻訳できることを言及することが重要です。モデル生物としてのマウスの使用は、多くのヒト疾患に対するトランスジェニックモデルが存在する有益な効果を有する。
開示事項
著者らは開示するものは何もない。
謝辞
この研究は、ドイツ連邦教育研究省(BMBF DysTract to C.W.I.)とヴュルツブルク大学の学際学際臨床研究センター(IZKF)(N-362〜C.W.I.)によって支援されました。Z2-CSP3 から L.R.へ)。さらに、このプロジェクトは、EJP RD COFUND-EJP N°825575(EurDyscover to J.V.)の下で欧州連合(EU)のホライゾン2020研究およびイノベーションプログラム、およびVERUM財団から資金を受け取っています。さらに、C.W.I.は、ドイツ・スティフトゥン神経学とパーキンソンフォンドによって、ドイツ・フォルシュングスゲマイインシャフト(DFG、ドイツ・レシヒ・ファンデーション)プロジェクトID 424778381-TRR 295によって資金提供されています。L.R.は、ジストニア医療レシチ財団によってさらにサポートされています。
著者らは、ケアリ・レーム、ヴェロニカ・センガー、ハイケ・メンツェル、ルイザ・フリースの技術支援と、ヘルガ・ブリュナーの動物ケアに感謝している。
資料
| Name | Company | Catalog Number | Comments |
| Acetic acid, ≥99.8% | Sigma-Aldrich | 33209-1L | |
| Appose ULC skin stapler 35W | Covidien | 8886803712 | |
| Beam | self made | ||
| Bepanthen eye cream | Bayer Vital GmbH | 81552983 | |
| Box for OFT | self made | ||
| Camcorder GC-PX100 | JVC | ||
| Catwalk XT | Noldus | setup and software | |
| Chamber for isofluran | GT-Labortechnik | custom made | |
| Disposable scalpel No. 11 | Feather | 20.001.30.011 | |
| Dräger Vapor 19.3 isoflurane system | Dr. Wilfried Müller GmbH | ||
| Dumont #2 - laminectomy forceps | Fine Science Tools | 11223-20 | |
| Dumont #5 forceps | Fine Science Tools | 11251-30 | super-fine |
| Dustless precision pellets 45 mg | Bio-Serv | F0021 | |
| EthoVision XT | Noldus | setup and software | |
| Forceps 160 mm | Hartenstein | PZ09 | |
| Gas anesthesia mask, rat | Dr. Wilfried Müller GmbH | ||
| Goal box for ladder rung walking task apparatus | self made | ||
| Hair clipper Magnum 5000 | Wahl GmbH | ||
| Hardened fine scissors | Fine Science Tools | 14090-11 | |
| Heating table | MEDAX | 13801 | |
| Isofluran CP 1ml/ml, 250 ml | cp-pharma | 1214 | prescription needed |
| Kinovea | www.kinovea.org | ||
| Ladder rung walking task apparatus | self made | ||
| Needleholder | KLS Martin | 20-526-14-07 | |
| Octeniderm | Schülke | 118211 | |
| Rimadyl 50 mg/ml, injectable | Zoetis | Carprofen, prescription needed | |
| Rubber band retractors | self made | ||
| Spacer for beam | self made | ||
| Spacer for ladder rung walking task apparatus | self made | ||
| Suture Silkam 4/0 DS 19 | B. Braun | C0762202 | |
| Ultra fine hemostats (non-serrated clamp) | Fine Science Tools | 13020-12 |
参考文献
- Iannaccone, P. M., Jacob, H. J. Rats. Disease Models & Mechanisms. 2 (5-6), 206-210 (2009).
- Phifer-Rixey, M., Nachman, M. W. Insights into mammalian biology from the wild house mouse Mus musculus. Elife. 4, (2015).
- Musacchio, T., et al. Subthalamic nucleus deep brain stimulation is neuroprotective in the A53T alpha-synuclein Parkinson's disease rat model. Annals of Neurology. 81 (6), 825-836 (2017).
- Ip, C. W., et al. Tor1a+/- mice develop dystonia-like movements via a striatal dopaminergic dysregulation triggered by peripheral nerve injury. Acta Neuropathologica Communications. 4 (1), 108(2016).
- Rauschenberger, L., et al. Striatal dopaminergic dysregulation and dystonia-like movements induced by sensorimotor stress in a pharmacological mouse model of rapid-onset dystonia-parkinsonism. Experimental Neurology. 323, 113109(2020).
- Klein, A., Wessolleck, J., Papazoglou, A., Metz, G. A., Nikkhah, G. Walking pattern analysis after unilateral 6-OHDA lesion and transplantation of foetal dopaminergic progenitor cells in rats. Behavioural Brain Research. 199 (2), 317-325 (2009).
- Kim, D. H., Murovic, J. A., Tiel, R., Kline, D. G. Management and outcomes in 353 surgically treated sciatic nerve lesions. Journal of Neurosurgery. 101 (1), 8-17 (2004).
- Kline, D. G., Kim, D., Midha, R., Harsh, C., Tiel, R. Management and results of sciatic nerve injuries: a 24-year experience. Journal of Neurosurgery. 89 (1), 13-23 (1998).
- Kaplan, H. M., Mishra, P., Kohn, J. The overwhelming use of rat models in nerve regeneration research may compromise designs of nerve guidance conduits for humans. Journal of Materials Science: Materials in Medicine. 26 (8), 226(2015).
- Bauder, A. R., Ferguson, T. A. Reproducible mouse sciatic nerve crush and subsequent assessment of regeneration by whole mount muscle analysis. Journal of Visualized Experiments. (60), e3606(2012).
- Savastano, L. E., et al. Sciatic nerve injury: a simple and subtle model for investigating many aspects of nervous system damage and recovery. Journal of Neuroscience Methods. 227, 166-180 (2014).
- Menorca, R. M., Fussell, T. S., Elfar, J. C. Nerve physiology: mechanisms of injury and recovery. Hand Clinics. 29 (3), 317-330 (2013).
- Luis, A. L., et al. Neural cell transplantation effects on sciatic nerve regeneration after a standardized crush injury in the rat. Microsurgery. 28 (6), 458-470 (2008).
- Knorr, S., et al. The evolution of dystonia-like movements in TOR1A rats after transient nerve injury is accompanied by dopaminergic dysregulation and abnormal oscillatory activity of a central motor network. Neurobiology of Disease. , 105337(2021).
- Quartarone, A., Hallett, M. Emerging concepts in the physiological basis of dystonia. Movement Disorders. 28 (7), 958-967 (2013).
- Metz, G. A., Whishaw, I. Q. The ladder rung walking task: a scoring system and its practical application. Journal of Visualized Experiments. (28), e1204(2009).
- Metz, G. A., Whishaw, I. Q. Cortical and subcortical lesions impair skilled walking in the ladder rung walking test: a new task to evaluate fore- and hindlimb stepping, placing, and co-ordination. Journal of Neuroscience Methods. 115 (2), 169-179 (2002).
- Johansson, B. B., Ohlsson, A. L. Environment, social interaction, and physical activity as determinants of functional outcome after cerebral infarction in the rat. Experimental Neurology. 139 (2), 322-327 (1996).
- Ohwatashi, A., Ikeda, S., Harada, K., Kamikawa, Y., Yoshida, A. Exercise enhanced functional recovery and expression of GDNF after photochemically induced cerebral infarction in the rat. EXCLI Journal. 12, 693-700 (2013).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved