È necessario avere un abbonamento a JoVE per visualizzare questo. Accedi o inizia la tua prova gratuita.
Method Article
TD Drive: un impianto parametrico open-source per registrazioni elettrofisiologiche multi-area in ratti comportamentali e addormentati
In questo articolo
Riepilogo
Qui, presentiamo un impianto unico e stampabile in 3D per ratti, chiamato TD Drive, in grado di registrare elettrodi a filo bilaterali simmetrici, attualmente in un massimo di dieci aree cerebrali distribuite contemporaneamente.
Abstract
Interazioni intricate tra più aree cerebrali sono alla base della maggior parte delle funzioni attribuite al cervello. Il processo di apprendimento, così come la formazione e il consolidamento dei ricordi, sono due esempi che si basano fortemente sulla connettività funzionale in tutto il cervello. Inoltre, lo studio delle somiglianze e/o delle differenze emisferiche va di pari passo con queste interazioni multi-area. Gli studi elettrofisiologici che cercano di chiarire ulteriormente questi processi complessi dipendono quindi dalla registrazione dell'attività cerebrale in più luoghi contemporaneamente e spesso in modo bilaterale. Qui viene presentato un impianto stampabile in 3D per ratti, chiamato TD Drive, in grado di registrare elettrodi a filo bilaterali simmetrici, attualmente in un massimo di dieci aree cerebrali distribuite contemporaneamente. Il design open-source è stato creato utilizzando i principi della progettazione parametrica, consentendo ai potenziali utenti di adattare facilmente il design dell'azionamento alle proprie esigenze semplicemente regolando parametri di alto livello, come le coordinate antero-posteriori e mediolaterali delle posizioni degli elettrodi di registrazione. Il design dell'impianto è stato convalidato in n = 20 ratti incappucciati Lister che hanno svolto compiti diversi. L'impianto era compatibile con le registrazioni del sonno legate e le registrazioni in campo aperto (Object Exploration), nonché con la registrazione wireless in un grande labirinto utilizzando due diversi sistemi di registrazione commerciali e headstage. Pertanto, qui viene presentata la progettazione e l'assemblaggio adattabili di un nuovo impianto elettrofisiologico, che facilita la preparazione e l'impianto rapidi.
Introduzione
La natura multi-area delle interazioni cerebrali durante la veglia e il sonno rende difficile studiare in modo esaustivo i processi fisiologici in corso. Mentre approcci come la risonanza magnetica funzionale (fMRI) e l'ecografia funzionale (fUS) consentono il campionamento dell'attività cerebrale da cervelli interi 1,2, sfruttano l'accoppiamento neurovascolare per dedurre l'attività cerebrale dall'attività emodinamica, limitando la loro risoluzione temporale2. Inoltre, la fMRI richiede il posizionamento del soggetto della ricerca in uno scanner MRI, vietando esperimenti con animali che si muovono liberamente. L'imaging ottico della dinamica del calcio con imaging a singolo o multifotone consente registrazioni specifiche per tipo di cellula di centinaia di neuroni contemporaneamente3. Tuttavia, i microscopi montati sulla testa come il Miniscope3, che consentono un comportamento di movimento libero, sono solitamente limitati all'imaging di aree corticali superficiali in cervelli intatti4. Mentre il diametro del loro campo visivo sulla corteccia può essere dell'ordine di 1 mm, i requisiti di spazio di questi microscopi montati sulla testa possono rendere difficile il targeting di diverse aree, in particolare adiacenti. Pertanto, per catturare accuratamente le dinamiche cerebrali multi-area nella veglia e nel sonno, l'elettrofisiologia extracellulare, registrata con elettrodi impiantati nelle aree cerebrali di interesse, è uno dei metodi di scelta grazie alla sua elevata risoluzione temporale e precisione spaziale5. Inoltre, consente la caratterizzazione della dinamica del sonno negli animali compatibile con le analisi ottenute dall'EEG umano, aumentando il valore traslazionale di questo metodo6.
Classicamente, gli studi che registrano l'attività cerebrale con elettrodi extracellulari hanno impiegato singoli elettrodi a filo o fasci di elettrodi, come i tetrodi7. Sonde all'avanguardia come la sonda Neuropixels8 consentono di mirare a più aree contemporaneamente, dato che sono allineate su un asse che consente di impiantare la sonda lungo quell'asse senza danneggiare l'animale. Tuttavia, le registrazioni simultanee accurate di più aree spazialmente separate rimangono ancora impegnative, con i metodi esistenti che sono costosi o richiedono molto tempo.
Negli ultimi anni, i metodi di produzione additiva come la stereolitografia sono diventati ampiamente disponibili. Ciò ha permesso ai ricercatori di sviluppare nuovi impianti di elettrodi adattabili alle loro esigenze sperimentali9, ad esempio un targeting semplificato e ripetibile di più aree cerebrali. Spesso, questi progetti di impianti sono anche condivisi con la comunità accademica come hardware open source, consentendo ad altri ricercatori di adattarli ai propri scopi. Il grado di adattabilità di specifici impianti varia sia in base a come l'impianto è progettato sia a come è condiviso. La modellazione parametrica10 è un approccio popolare nella progettazione assistita da computer, in cui diversi componenti del progetto sono collegati da parametri interdipendenti e da una storia di progettazione definita. L'implementazione di un approccio parametrico per la progettazione degli impianti ne aumenta la riutilizzabilità e l'adattabilità10, poiché la modifica dei singoli parametri aggiorna automaticamente i progetti completi senza la necessità di una complessa rimodellazione del progetto. Una necessità consequenziale è che il progetto stesso sia condiviso in un formato modificabile che preservi le relazioni parametriche e la cronologia del progetto. I formati di file che rappresentano solo primitive geometriche, come STL o STEP, rendono impossibili le successive modifiche parametriche dei modelli pubblicati.
Mentre gli iperdrive tetrodici 11,12,13 consentono registrazioni da dozzine di tetrodi, il loro assemblaggio e il loro impianto richiedono molto tempo e la loro qualità dipende in gran parte dall'abilità e dall'esperienza del singolo ricercatore. Inoltre, di solito combinano i tubi guida che dirigono gli elettrodi di registrazione verso la loro posizione target in uno o due fasci più grandi, limitando così il numero e la diffusione delle aree che possono essere mirate in modo efficiente.
Altri impianti14,15 espongono l'intero cranio e consentono il posizionamento libero di più microazionamenti individuali che trasportano gli elettrodi di registrazione. Sebbene il posizionamento di microdrive indipendenti16 durante l'intervento massimizzi la flessibilità, aumenta il tempo di intervento e può rendere difficile il targeting di più aree adiacenti a causa dei requisiti di spazio dei singoli microdrive. Inoltre, sebbene gli impianti siano open source, vengono pubblicati solo come file STL, rendendo difficile la modifica.
Un esempio di azionamento con una filosofia parametrica più intrinseca è il RatHat17. Fornendo uno stencil chirurgico che copre l'intera superficie dorsale del cranio, consente di mirare con precisione a più bersagli cerebrali senza l'uso di una cornice stereotassica durante l'intervento chirurgico. Sono disponibili diverse varianti di impianto per cannule, optrodi o tetrodi. Tuttavia, sebbene l'unità sia gratuita per scopi accademici, non è pubblicata in modo open source, creando un ostacolo per i ricercatori nella valutazione e nell'utilizzo dell'impianto.
In questo articolo viene presentato il TD Drive (vedi Figura 1), un nuovo impianto stampabile in 3D per la registrazione di elettrodi extracellulari nei ratti. Il TD Drive mira a superare alcuni degli svantaggi delle soluzioni esistenti: consente di colpire più aree cerebrali, riflesse su entrambi gli emisferi, con elettrodi a filo indipendenti contemporaneamente. Grazie al suo design semplice, può essere assemblato in poche ore a un costo relativamente basso da ricercatori meno esperti. Il TD Drive è pubblicato open-source, in formati di file facilmente modificabili per consentire ai ricercatori di adattarlo alle loro esigenze specifiche. L'incorporazione di un approccio di modellazione 3D parametrica fin dall'inizio del processo di progettazione del TD Drive consente di astrarre i parametri necessari: per modificare le posizioni di destinazione, i ricercatori possono semplicemente modificare i parametri che rappresentano le loro coordinate dorso-ventrali e anteroposteriori, senza la necessità di riprogettare l'azionamento da soli. I file per modificare e produrre l'unità TD sono disponibili all'indirizzo https://github.com/3Dneuro/TD_Drive.

Figura 1: Panoramica dell'unità TD . (A) Rendering di un'unità TD con un cappuccio protettivo. (B) Rendering con le parti interne mostrate. L'unità TD è dotata di (a) posizioni di registrazione multiple regolabili parametricamente per fili di elettrodi fissi e mobili, un EIB con (b) un connettore Omnetics ad alta densità compatibile con i comuni sistemi di acquisizione dati cablati e wireless e (c) una mappatura intuitiva dei canali ottimizzata per le registrazioni con sistemi Intan/Open Ephys (vedere la Figura 1 supplementare) e (d) un cappuccio per proteggere l'impianto durante le registrazioni in tethering e quando non è collegato alcun headstage. (C) Uno stencil guida sul fondo del TD Drive facilita il posizionamento delle cannule guida e funge da verifica ridondante delle posizioni degli impianti durante l'intervento chirurgico. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
Il design dell'impianto è stato testato in n = 4, convalidato in n = 8 e confermato in n= 8 ratti incappucciati Lister che hanno svolto compiti diversi. I primi 4 animali sono stati utilizzati per sviluppare l'azionamento e regolare i parametri. Quindi, è stato eseguito un progetto pilota completo con 8 animali (mostrato nei risultati). Una seconda coorte di 8 animali è stata analizzata e inclusa nell'analisi di sopravvivenza dell'impianto. L'impianto era compatibile con le registrazioni del sonno vincolate e le registrazioni in campo aperto (Object Exploration), nonché con la registrazione wireless in un grande labirinto (HexMaze 9 m x 5 m) utilizzando due diversi sistemi di registrazione commerciali e headstage. Le due coorti di 8 sono state registrate con due diversi sistemi di acquisizione: collegato per registrazioni del sonno più lunghe e wireless per registrazioni di esplorazione di labirinti di grandi dimensioni. Possiamo concludere che questo semplice azionamento a filo consente esperimenti di lunga durata con coorti più grandi da parte di ricercatori meno esperti per consentire l'analisi della fase del sonno e l'analisi delle oscillazioni in più aree cerebrali. Ciò è in contrasto con la maggior parte degli impianti di elettrofisiologia fino ad oggi, che, a causa della difficoltà e dell'intensità del tempo, consentono coorti di animali più piccole e di solito richiedono sperimentatori molto esperti. Tuttavia, con questa unità, non è possibile registrare l'attività dei singoli neuroni; pertanto, l'uso è limitato alle indagini sul potenziale di campo locale (LFP) e all'attività di sommatoria.
Protocollo
Il presente studio è stato approvato dalla Commissione centrale olandese Dierproeven (CCD) e condotto secondo la legge sugli esperimenti sugli animali (codici protocollo: 2020-0020-006 e 2020-0020-010). Sono stati utilizzati ratti incappucciati maschi di 9-12 settimane all'arrivo. I reagenti e le attrezzature utilizzate nel protocollo sono elencati nella Tabella dei Materiali. Vedere la Figura 1 supplementare e la Figura 2 supplementare per le fasi del processo di costruzione dell'unità.
1. Regolazione e creazione di modelli 3D e dati della scheda di interfaccia degli elettrodi (EIB)
- Aprire il progetto del corpo dell'unità in Autodesk Fusion. Fare clic su Modifica parametri nella scheda Modifica . Regolare le coordinate per la prima posizione di registrazione inserendo la coordinata anteroposteriore in anteroPosteriorSite1 e la coordinata mediolaterale in medioLateralSite1. È possibile regolare il diametro del foro per il tubo guida o gli elettrodi regolando il diametroSito1. Ripetere l'operazione per le posizioni di registrazione 2 e 3 e il design del modello verrà regolato automaticamente.
NOTA: Le tre posizioni utilizzate per l'attuale protocollo sono l'ippocampo (HPC), contenente fasci di fili mobili, e la corteccia prefrontale (PFC) e retrospleniale (RSC), entrambe con fasci di fili fissi (il fascio di fili PFC si rivolge sia alla corteccia prelimbica (PRL) che a quella cingolata anteriore (ACC)). La Tabella 1 fornisce i limiti imposti manualmente ai parametri che controllano le coordinate mediolaterali dei siti di registrazione. - Esporta il corpo dell'unità aggiornato facendo clic con il pulsante destro del mouse su di esso nel browser e selezionando Salva come mesh. Seleziona il tipo STL (binario), unità mm e fine alto.
- Selezionare i file STL preparati per il cap normale o, se necessario (ad esempio, quando i target sono molto laterali), i file STL preparati per i large cap.
- A seconda del tappo scelto, selezionare l'EIB normale o grande per la produzione. I file di produzione Gerber per entrambi gli EIB sono forniti come archivi zip che possono essere inviati direttamente a un servizio di produzione.
2. Stampa dei modelli 3D e produzione dell'EIB
NOTA: Per il presente studio, è stata utilizzata una stampante 3D disponibile in commercio per produrre le parti (vedi Tabella dei materiali). Quando si utilizzano stampanti diverse o si esternalizza la produzione, potrebbe essere necessario utilizzare resine diverse e comparabili per la produzione delle parti.
- Stampa il corpo dell'unità e le navette utilizzando la stereolitografia9 ad alta risoluzione in una resina normale o biocompatibile (ad es. resina trasparente, nera o bianca) con un'altezza dello strato di 25 μm. Stampa le parti per il tappo con una resina forte e robusta (ad esempio, Tough 2000).
- Produrre la BEI internamente o farla produrre da un fornitore di servizi esterno. Saldare il connettore ad alta densità all'EIB utilizzando tecniche di saldatura SMD (Surface Mounted Device).
NOTA: Se non si ha esperienza nella saldatura di componenti elettronici di alta qualità, si consiglia di far eseguire la saldatura esternamente, ad esempio presso l'officina elettronica dell'università o un fornitore commerciale. Rinforzare il connettore ad alta densità saldato applicando una forte resina epossidica attorno al connettore. Fare attenzione a non coprire i fori degli elettrodi con resina epossidica.
3. Post-elaborazione del corpo stampato in 3D
NOTA: Il tappo e le navette non dovrebbero richiedere la post-elaborazione. A seconda della qualità delle stampe 3D, potrebbe essere necessario carteggiarle leggermente o rimuovere le tracce di supporto rimanenti. Durante la levigatura e la foratura, fare attenzione a non rompere le pareti del corpo dell'azionamento. Se necessario, pulire le parti post-lavorate con isopropanolo e un panno morbido e/o aria compressa.
- Praticare i fori per i tubi guida sulla parte superiore e inferiore del corpo dell'unità con una punta da trapano da 0,5 mm montata in una morsa a spillo. In questo modo si garantisce che le dimensioni siano corrette e coerenti tra i siti.
- Praticare i due fori di svasatura (come nella Figura 2E) sul corpo dell'unità per l'inserto in ottone della navetta utilizzando una punta da 2 mm in una morsa a spillo.
- Pulire i fori di svasatura dai detriti di perforazione con aria compressa. Quindi picchiettare i fori guida per le viti della navetta, che sono l'estensione dei fori di svasatura, con un rubinetto M1. Eseguire la picchiettatura in due o più iterazioni, rimuovendo i detriti dal rubinetto e dal foro tra le iterazioni. Opzionalmente lubrificare il rubinetto con una goccia di olio minerale.
- Pulire il corpo dell'unità da detriti di perforazione e maschiatura con aria compressa.

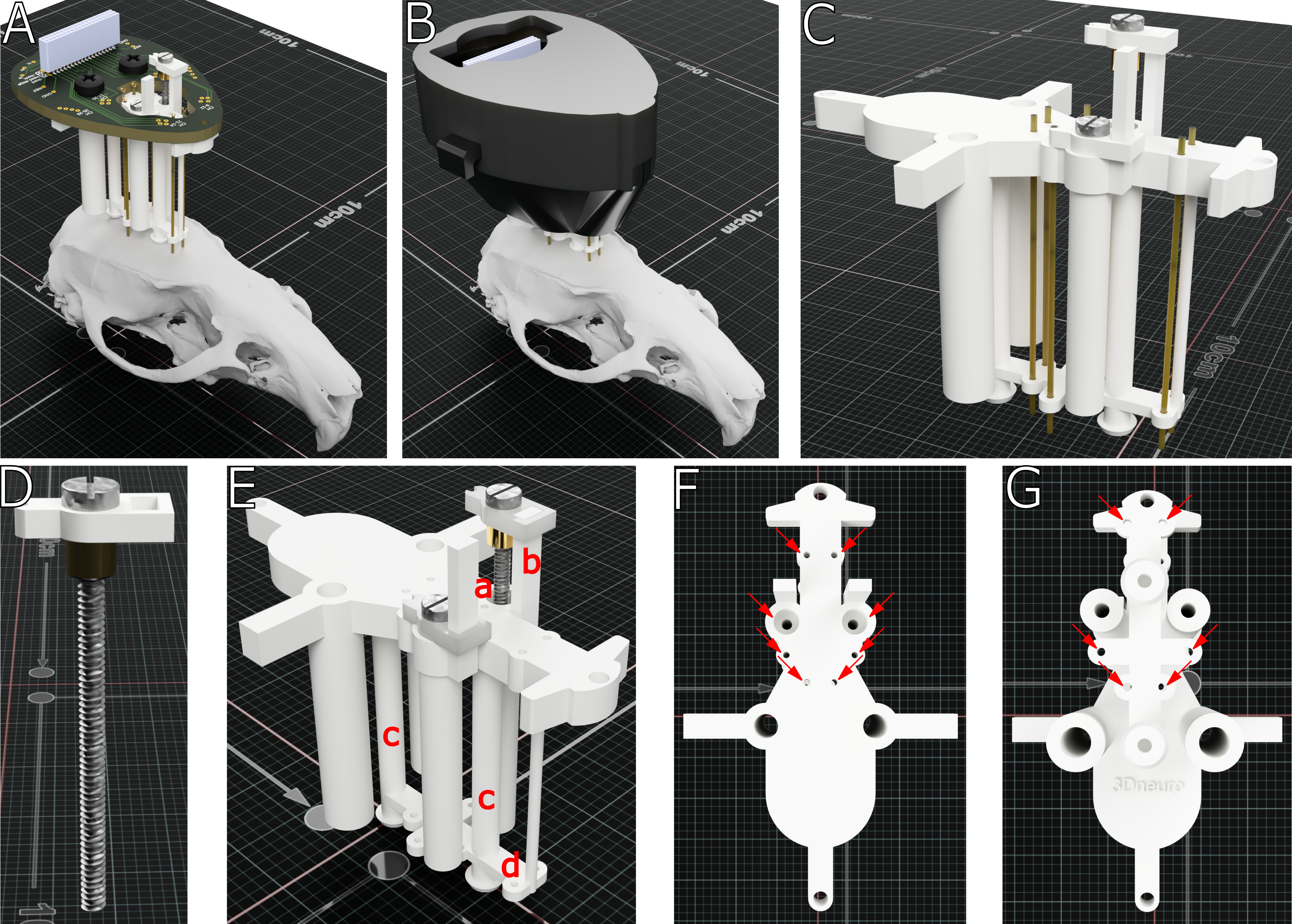
Figura 2: Rendering del TD Drive. (A,B) TD Drive (A) senza e (B) con un cappuccio protettivo su un modello di cranio di ratto. (C) Tubi guida in poliimmide inseriti correttamente in ciascuno dei sei siti di registrazione. (D) Un gruppo navetta isolato e completo con la vite di guida, la navetta stampata in 3D e l'inserto in ottone saldato. (E) Corpo TD Drive con due navette inserite. Contrassegnati in rosso: (a) fori svasati per la navetta, (b) guida della navetta, (c) piedistalli centrali del corpo motore, (d) stencil di guida. (F,G) Le posizioni importanti sulla parte superiore (F) e inferiore (G) del corpo dell'unità che potrebbero richiedere la post-elaborazione dopo la stampa 3D sono indicate da una freccia rossa ciascuna. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
4. Assemblaggi di navette
- Fai scorrere una navetta stampata in 3D su una vite M1x16. Usa un inserto in ottone M1 per tenere in posizione la navetta stampata in 3D. La navetta deve essere in grado di ruotare liberamente senza muoversi verso l'alto o verso il basso dopo il posizionamento dell'inserto.
ATTENZIONE: I seguenti passaggi contengono rischi di ustione (saldatura). A seconda del flusso di saldatura e saldatura utilizzato, potrebbero includere l'esposizione a sostanze irritanti per le vie respiratorie e piombo. Indossare sempre una protezione per gli occhi durante la saldatura (poiché la saldatura può scoppiettare) e seguire le linee guida appropriate per una manipolazione sicura di sostanze potenzialmente dannose, inclusa un'adeguata ventilazione dell'area di lavoro per estrarre i fumi di saldatura. Seguire le normative locali e le procedure operative o consultare il materiale disponibile online18,19. - Utilizzando una piccola quantità di pasta saldante, saldare l'inserto in ottone alla vite. Fare attenzione a non surriscaldare l'inserto e la vite per non sciogliere la navetta stampata in 3D. A seconda della resina utilizzata per la stampa 3D della navetta, è difficile evitare una piccola quantità di fusione (e, di conseguenza, la navetta che si attacca all'inserto).
NOTA: Quando si utilizzano viti in acciaio inossidabile, potrebbe essere necessario un flusso di saldatura. Si consiglia di utilizzare viti in ottone o acciaio a macchina, poiché sono più facili da saldare. - Dopo che il gruppo della navetta si è raffreddato, ruotare delicatamente la navetta stampata in 3D più volte attorno alla vite. Se la navetta si è fusa con l'inserto durante la saldatura, questo dovrebbe rilasciarlo.
NOTA: Assicurarsi che la navetta possa ruotare liberamente e che non oscilli. In tal caso, eliminare il gruppo navetta e avviarne uno nuovo. Provare con cautela a ruotare l'inserto in ottone. Se ruota rispetto alla vite, ripetere il processo di saldatura.
5. Assemblaggio dell'unità
- Tagliare i tubi in poliimmide disponibili in commercio a circa 25 mm di lunghezza, ma almeno abbastanza lunghi da estendersi attraverso l'intero corpo dell'azionamento.
- Inserire i tubi guida in poliimmide nel corpo dell'azionamento. Ogni tubo deve essere inserito attraverso un foro sulla parte superiore dell'unità e il foro corrispondente nello stencil guida sulla parte inferiore dell'unità ("d" nella Figura 2E). I tubi devono essere inseriti fino a quando non sono a filo con la parte superiore del corpo dell'azionamento.
- Utilizzando un ago sottile o uno stuzzicadenti, applicare una piccola quantità di colla cianoacrilica liquida sui fori nella parte superiore del corpo dell'unità per fissare i tubi guida in posizione. Applicare la colla dal lato inferiore del corpo per evitare che la colla penetri nei tubi guida. La colla verrà aspirata nello spazio tra il corpo dell'unità e il tubo di guida da forze capillari e quindi collegherà i due.
- Applicare una piccola quantità di colla cianoacrilica all'interfaccia tra i tubi guida e lo stencil guida nella parte inferiore del corpo dell'unità. Anche in questo caso, fare attenzione a non ostruire i tubi guida con la colla. Lascia asciugare la colla per qualche minuto.
NOTA: L'esatta quantità di tempo necessaria dipende dal materiale di azionamento e dalla distanza tra il corpo di azionamento e i tubi di guida. In generale, 5-10 minuti dovrebbero essere sufficienti. - Capovolgere il corpo dell'unità e tagliare i tubi guida in poliimmide sul fondo in modo che si estendano di circa 1 mm oltre i piedistalli centrali del corpo dell'unità ("c" nella Figura 2E e nella Figura 2 supplementare). In questa configurazione, l'estremità dei tubi guida sarà a filo con la superficie cerebrale al momento dell'impianto.
NOTA: L'unità è stata sviluppata per colpire le aree più profonde del cervello. Se le aree corticali superficiali sono mirate, potrebbero essere necessari tubi guida in poliimmide più corti per non danneggiare la superficie cerebrale in caso di gonfiore cerebrale iniziale. - Inserire due gruppi shuttle nel corpo dell'azionamento. Mentre le si avvita nei fori delle guide filettate, assicurarsi che le viti siano parallele alle guide della navetta ("b" nella Figura 2E). Utilizzare le dita per allineare delicatamente le navette con le guide della navetta.
- Avvitare completamente le navette nei fori di svasatura per verificare che gli inserti in ottone del gruppo navetta non rimangano incastrati nel corpo dell'unità o entrino in collisione con i tubi guida in poliimmide. Per questo protocollo è richiesta una distanza minima di 16 giri completi. Se questo non viene raggiunto, tagliare ulteriormente il tubo di poliimmide sopra il corpo dell'unità per creare più spazio. Non serrare eccessivamente la navetta nel corpo dell'azionamento: ciò può distruggere le filettature intrappolate sul corpo dell'unità e il collegamento a saldare del gruppo navetta.
NOTA: Se un gruppo navetta si blocca, rimuoverlo completamente e controllare se il collegamento a saldare si è allentato. In tal caso, utilizzare un nuovo gruppo shuttle. Se il gruppo della navetta entra in collisione con un tubo di guida, accorciare il tubo di guida in modo che non si estenda oltre il corpo di azionamento. - Avvitare l'EIB al corpo dell'unità con viti in poliimmide M2,5x5. Applicare alcune gocce di colla cianoacrilica tra il corpo dell'unità e l'EIB. Assicurarsi di non ostruire i fori passanti per il collegamento dell'elettrodo.
6. Preparazione del coperchio di protezione
- Inserire un dado M2 in acciaio inossidabile nell'estrusione sulla metà sinistra del tappo e fissarlo con colla cianoacrilica.
- Se necessario, praticare il foro nella parte anteriore del cappuccio sinistro con una punta da trapano M1 in una morsa a spillo. Battere il foro sulla parte anteriore della metà del tappo destro con un tocco M1.
7. Preparazione degli elettrodi a filo
- Preparare due piastre metalliche come superficie per la creazione dei fasci di fili degli elettrodi. Le piastre fungono da superficie piana, stabile ma mobile su cui avverrà l'assemblaggio, l'incollaggio e il taglio del fascio di fili. Attacca la carta da disegno alla prima lastra e annoda due nastri adesivi da pittore sulla seconda piastra, con la superficie adesiva rivolta verso l'alto.
- Tre dei quattro fili nei fasci HPC verranno tagliati con un angolo di 60 gradi per creare un offset nella direzione dorso-ventrale. Ciò consentirà il posizionamento di un filo sopra, dentro e sotto lo strato piramidale dell'ippocampo, rispettivamente. Per facilitare il taglio, tracciare una linea chiara con un angolo di 60 gradi sulla carta da plottaggio (linea di 60 gradi).
- Per ogni fascio di elettrodi HPC, tagliare 4 pezzi di filo dell'elettrodo con una lunghezza di 4,5 cm ciascuno. Per ogni fascio di elettrodi PFC e RSC, tagliare 4 pezzi di filo dell'elettrodo con una lunghezza di 3,5 cm ciascuno.
- Raccogli delicatamente 4 fili toccandoli con la punta di un dito (si attaccheranno ad esso) e posizionali il più vicino possibile l'uno all'altro sul nastro da pittore. Assicurati di non metterli uno sopra l'altro.
- Al microscopio, usa una pinza per posizionare i fili il più vicino possibile. Applicare uno strato sottile di colla cianoacrilica liquida sui primi 2 cm della parte superiore del fascio. Per il fascio HPC, incollare > 2 cm e < 3,5 cm di filo. Attendi che la colla si asciughi.
- Toccare delicatamente i fili con alcune pinze al microscopio. Se non si separano, vengono incollati correttamente. Come controllo di sanità mentale, assicurati che lo strato di colla brilli sotto l'illuminazione del microscopio.
- Una volta completamente asciugato, rimuovere il fascio di filo dal nastro e trasferirlo sulla piastra con la carta da plottaggio. Al microscopio, controllare che il fascio di fili non sia in eccesso di colla sulla parte superiore o sui lati e rimuoverlo con cura con la lama di un bisturi.
- Per i fasci RSC, eseguire un taglio dritto nella parte inferiore dell'array, perpendicolare alla direzione dei fili.
- Per i bundle HPC, posizionare l'array sulla carta da disegno in modo che intersechi la linea di 60 gradi e utilizzare la linea come guida per eseguire un taglio angolato di 60 gradi rispetto alla direzione dei fili.
- Quindi, usa una lama di bisturi per dividere con cura il più corto dei 4 fili dal fascio. Tagliare il filo perpendicolarmente alla direzione del filo, accorciandolo a circa 0,75 mm rispetto al secondo filo più lungo del fascio.
- Per i fasci PFC, dividere la parte inferiore dell'array in due fasci a 2 fili. Assicurarsi che i due fili siano ben incollati insieme. Accorciare uno dei fasci di 2 fili di 1 mm tagliandolo perpendicolarmente alla direzione del filo. Vedere la Figura 1 supplementare (in basso) e la Figura 2b supplementare per le immagini dei fasci di fili tagliati.
8. Preparazione del filo di terra e dei cavi EEG
- Estrarre almeno 10 pin SIP/DIP da una presa multipla SIP/DIP interconnessa con passo da 1,27 mm.
- Tagliare 2 pezzi di 6 cm di lunghezza per il filo di terra (GND). Tagliare 8 pezzi di 6 cm di lunghezza per il filo EEG. Utilizzare una lama di bisturi per rimuovere con cura parte dell'isolamento da entrambe le estremità di tutti i fili.
- Posizionare una vite in acciaio inossidabile M1x3 in una terza mano, lasciando quanto più spazio possibile accessibile sotto la testa della vite. Avvolgere un lato non isolato di un filo GND o EEG attorno al gambo della vite, appena sotto la testa della vite.
- Applicare una piccola quantità di flusso di saldatura con un ago piccolo o uno stuzzicadenti. Saldare il filo alla vite. Assicurarsi di non ostruire accidentalmente la fessura della testa della vite.
- Posizionare un perno SIP/DIP nella terza mano in modo che il lato femmina sia accessibile. Inserire la parte deisolata del lato opposto del filo nel pin SIP/DIP. Applicare una piccola quantità di flusso di saldatura e saldare il filo al pin.
- Rimuovere il gruppo vite-cavo saldato dal supporto. Questo assemblaggio verrà impiantato nel cranio durante l'intervento chirurgico di impianto.
- Posizionare un altro perno SIP/DIP nel supporto, ruotato di 180 gradi (cioè accessibile dal lato maschio). Applicare una piccola quantità di flusso di saldatura e saldare un lato deisolato dell'altro filo sul lato maschio del pin.
- Rimuovere il gruppo spinotto del filo saldato dal supporto. Questo gruppo sarà successivamente collegato all'EIB e il gruppo vite-filo e il gruppo filo-pin saranno collegati tra loro durante l'intervento chirurgico di impianto utilizzando i loro due pin.
- Per rinforzare le connessioni saldate, applicare una piccola quantità di colla cianoacrilica sulla connessione tra fili e pin.
- Dopo che la colla si è asciugata, verificare che i perni SIP/DIP dei due gruppi possano essere collegati senza problemi. Utilizzare l'opzione di controllo della continuità di un multimetro per verificare che vi sia un collegamento continuo tra la vite e l'estremità del filo deisolato del gruppo filo-pin quando entrambi i gruppi sono collegati. Facoltativamente, è possibile codificare a colori ogni set di fili con lo smalto per unghie (vedere la tabella dei materiali) per semplificare la corretta connessione durante la chirurgia implantare.
9. Caricamento dei fasci di fili nell'unità
- Fissare l'unità a un supporto. Fare attenzione a non esercitare troppa pressione sull'EIB o danneggiare il connettore ad alta densità in questo passaggio.
- Una volta che il corpo dell'unità è in una posizione stabile, prendere uno dei fasci di fili e farlo scorrere con cautela nel rispettivo tubo di poliimmide, a mano o utilizzando un paio di pinze sottili. Assicurarsi che l'array di fili sia posizionato con l'orientamento corretto (ad esempio, per l'array PFC, i due fili più lunghi dell'array devono essere rivolti verso la parte mediale) e fare attenzione a non piegare l'array di fili.
- Ripetere l'ultimo passaggio per tutti gli altri fasci di fili.
- Usa una pinza sottile per afferrare uno dei fili e piegarlo con cura verso il foro in cui vuoi inserirlo. Una volta inserito, usa uno spillo d'oro per fissarlo nel foro EIB. Ripetere l'operazione per tutti i fili del fascio e per tutti i fasci.
- Assicurarsi che, durante questa fase, i fili facciano un bel cappio sopra l'EIB (in questo modo, c'è ancora spazio per spostare il fascio su e giù per il tubo di poliimmide per regolare la lunghezza sul fondo del tubo) e che l'array che sporge dal fondo del tubo di poliimmide non si pieghi accidentalmente. Assicurarsi di annotare quale filo di ciascun fascio di fili si collega a ciascun canale dell'EIB. Vedere la Figura 1 supplementare per un'elaborazione sulla mappatura dei canali del TD Drive.
NOTA: In alternativa, dopo aver caricato ogni fascio di fili (passaggio 9.2), è possibile collegare direttamente i fili all'EIB (passaggio 9.4) e quindi procedere con il passaggio 9.2 + 9.4 per i restanti fasci di fili. Questo può essere variato in base alle preferenze personali degli sperimentatori. Vedere la Figura 2b supplementare per un esempio di un TD Drive caricato.
- Assicurarsi che, durante questa fase, i fili facciano un bel cappio sopra l'EIB (in questo modo, c'è ancora spazio per spostare il fascio su e giù per il tubo di poliimmide per regolare la lunghezza sul fondo del tubo) e che l'array che sporge dal fondo del tubo di poliimmide non si pieghi accidentalmente. Assicurarsi di annotare quale filo di ciascun fascio di fili si collega a ciascun canale dell'EIB. Vedere la Figura 1 supplementare per un'elaborazione sulla mappatura dei canali del TD Drive.
- Regolare la lunghezza dei fasci di fili per individuare correttamente le posizioni di registrazione spingendo o tirando delicatamente i fasci di fili dentro o fuori dal tubo guida (vedere la Figura 2d supplementare).
NOTA: Poiché i tubi guida sono tagliati in modo da essere a filo con la superficie del cervello, la distanza alla quale un fascio di fili si estende oltre il tubo guida corrisponde alla posizione dorso-ventrale dell'area target. I fasci di fili HPC mobili devono essere a filo con il fondo del tubo guida, i fasci RSC fissi devono estendersi di 1,5 mm e i fasci PFC fissi devono estendersi di 3,5 mm oltre i tubi guida. Quando si spingono o si tirano i gruppi di cavi, fare attenzione a non estrarre i singoli fili dall'EIB sulla parte superiore o a piegare la parte inferiore del fascio di fili. - Quando gli array di fili fissi (RSC e PFC) sono allineati, applicare una piccola quantità di colla epossidica forte sulla parte superiore dei tubi guida, incollando i fasci in posizione. Durante l'indurimento della resina epossidica, assicurarsi che i fasci di fili siano ancora allineati correttamente nella parte inferiore.
- Per fissare gli array di fili HPC mobili, spostare prima la navetta nella posizione più alta richiesta (negli esperimenti descritti in questo articolo, almeno 16 giri completi/4 mm sopra la posizione più bassa). Quindi spingere i fasci di fili nell'apertura a forma di U della navetta e incollarli in posizione con una piccola quantità di colla epossidica forte.
NOTA: Assicurarsi che la resina epossidica non scorra lungo il fascio nel tubo di poliimmide. Quando la resina epossidica è indurita, applicare un secondo strato di resina epossidica nello stesso punto per rinforzare la connessione e rendere meno probabile la rottura della connessione quando la navetta viene spostata. - Inserire con cautela l'estremità aperta del gruppo filo-pin di un filo GND attraverso uno dei fori passanti contrassegnati con GND. Fissarlo usando un perno d'oro.
NOTA: Quando si utilizza un headstage in cui i canali GND e di riferimento (REF) sono in cortocircuito, è possibile utilizzare anche un canale REF se più conveniente. - Rimuovere l'unità dal supporto; Fare attenzione a non piegare nessuno dei gruppi di cavi. Ricollegare la parte anteriore dell'unità nello stesso supporto e inserire 4 gruppi di spinotti EEG nei fori passanti per i canali EEG (contrassegnati con 2,4, 29, 31) e fissarli con un perno dorato ciascuno.
- Per tutti i cavi GND ed EEG, utilizzare un multimetro sull'impostazione di continuità per verificare il collegamento continuo tra il pin dorato sull'EIB e il pin del gruppo filo-pin collegato.
- Conservare l'unità. Questo può essere fatto, ad esempio, attaccando il tappo al corpo dell'unità e riponendolo capovolto.
NOTA: Prima dell'impianto chirurgico, sterilizzare la parte inferiore dell'unità utilizzando etanolo. Tutte le viti ossee e i cavi GND/EEG devono essere sterilizzati in etanolo. Gli strumenti chirurgici devono essere sterilizzati in autoclave.
10. Chirurgia implantare drive
NOTA: Questo passaggio descrive brevemente le procedure chirurgiche per l'impianto del TD Drive. Un protocollo di impianto più ampio, che include una descrizione degli strumenti, nonché le dosi e le concentrazioni dei farmaci, può essere trovato nel File supplementare 1.
- Sterilizzare gli strumenti chirurgici e pulire e sanificare l'area chirurgica seguendo le linee guida istituzionali locali. Per sterilizzare gli impianti, posizionare le parti dei fili degli elettrodi che saranno a contatto con il cervello in etanolo per almeno un minuto.
NOTA: Una lunga esposizione all'etanolo o ai suoi fumi può indebolire la colla cianoacrilica. Se i fumi non sono intrappolati, prolungare il tempo di immersione dei fili nell'etanolo. Al fine di verificare l'integrità della colla, si consiglia di trovare il momento ottimale con un impianto di prova che non viene utilizzato in un esperimento reale. - Fornire l'analgesia preventiva, gli antibiotici e l'anestesia gassosa (isoflurano) necessari in conformità con le linee guida istituzionali e locali.
- Metti il ratto nell'apparato stereotassico. Radere la parte superiore della testa e disinfettare la pelle con iodio povidone. Applicare per via sottocutanea l'anestetico locale (lidocaina) e praticare una piccola incisione sul cranio sopra la linea mediana.
- Esponi il cranio tirando la pelle di lato. Rimuovere il tessuto connettivo sulla parte superiore del cranio, asciugare e pulire la superficie del cranio. Staccare delicatamente i muscoli sul lato del cranio per consentire il posizionamento delle viti di ancoraggio.
- Misura le coordinate bregma e lambda. Per un puntamento preciso, assicurarsi che la superficie del cranio sia parallela al piano anteroposteriore-mediolaterale della stereotassa misurando la differenza nella posizione dorso-ventrale di bregma e lambda. Se le coordinate differiscono, regolare la posizione del ratto in stereotassa alzando o abbassando il bocchino.
- Segnare le craniotomie attorno alle posizioni target (corteccia prelimbica (AP +3,5 mm e ML + -1 mm), retrospleniale (AP+5,8 mm e ML +-1 mm e ippocampo (AP -3,8 mm e ML + - 2,5 mm)).
- Praticare i fori per le viti GND/EEG e le viti di ancoraggio. Inserire le viti e coprirle con acrilico dentale liquido. Forare le craniotomie e rimuovere con cura la dura madre. Prevenire l'essiccazione delle craniotomie applicando soluzione fisiologica sterile.
- Posizionare con cura il TD Drive sopra le craniotomie, assicurandosi che i tubi guida siano a filo con il cranio. Proteggere i tubi guida con vaselina e fissare il TD Drive al cranio con acrilico dentale.
- Abbassare lentamente gli array di fili che puntano all'HPC dalla loro posizione iniziale (~1,5 mm DV dalla superficie del cervello) verso lo strato piramidale di CA1 ippocampale. Lo strato piramidale è stato raggiunto progressivamente nei giorni successivi durante i controlli del segnale nel periodo di recupero dei ratti.
- Posizionare il cappuccio protettivo attorno all'unità.
- Spegnere l'anestesia gassosa e rimuovere il ratto dal telaio stereotassico. Metti il ratto in una gabbia pulita all'interno di una camera riscaldata e fornisci cibo umido e acqua per il recupero. Monitora il ratto fino a quando non è di nuovo attivo, si muove nella gabbia, mangia e beve.
- Riporta il topo nella stanza dell'alloggio. Fornire analgesia e assistenza post-operatoria secondo le linee guida istituzionali. Ad esempio, si veda l'esempio del protocollo chirurgico nel File supplementare 1.
11. La ripresa della BEI
- Al termine dell'esperimento, recuperare l'unità e rimuovere il coperchio protettivo.
- Rimuovere i pin dorati e collegare con cura i fili degli elettrodi. Svitare l'EIB dal corpo dell'azionamento. Spingendo delicatamente una pinzetta morbida tra l'EIB e il corpo dell'unità o sollevando delicatamente l'EIB a mano, rilasciare il legame cianoacrilato rimanente che tiene l'EIB al corpo.
- Pulire l'EIB e i perni d'oro per riutilizzarli nei successivi impianti TD Drive. Prima di riutilizzare un EIB, controllare che i pin dorati e il connettore ad alta densità non siano usurati. Riutilizzare l'EIB solo se le vie sono sufficientemente intatte da consentire un buon collegamento tra i pin dorati, i fili degli elettrodi e l'EIB e se la connessione del connettore ad alta densità all'headstage è ancora sufficientemente stabile.
Risultati
Utilizzando le istruzioni fornite nel protocollo, il TD Drive potrebbe essere costruito facilmente da più sperimentatori. Dopo lo sviluppo dell'unità (n = 4), è stato eseguito un progetto pilota completo con otto animali. È stato impiantato un ulteriore lotto di otto animali ed è stata eseguita la raccolta dei dati sperimentali. Poiché l'analisi dei dati su questi animali non è stata completata, essi sono stati inclusi nell'analisi di sopravvivenza, ma non in altre analisi (ad ese...
Discussione
In questo articolo viene presentato un impianto adattabile per registrazioni bilaterali e simmetriche di elettrodi a filo multi-area per ratti che si muovono liberamente.
La possibilità di regolare facilmente l'impianto modificando i parametri predefiniti è stata una delle motivazioni per la creazione del TD Drive. Pur mirando a massimizzare la flessibilità per i parametri variabili, i vincoli intrinseci nelle relazioni tra di essi impongono necessariamente...
Divulgazioni
TS e PvH sono dipendenti di 3Dneuro, Nijmegen, Paesi Bassi. 3Dneuro ha co-sviluppato e produce il TD Drive.
Riconoscimenti
Gli autori desiderano ringraziare Angela Gomez Fonseca per l'ispirazione per lo sviluppo dell'unità e tutti gli studenti che hanno condotto esperimenti pilota con gli animali, Milan Bogers, Floor van Ravenswoud ed Eva Severijnen. Questo lavoro è stato sostenuto dal Consiglio olandese per la ricerca (NWO; Programma Crossover 17619 "INTENSE").
Materiali
| Name | Company | Catalog Number | Comments |
| 0.5 mm drill bit | McMaster | 2951A38 | |
| 1.27 mm pitch interconnected SIP/DIP socket (Mill-Max) | Mouser Electronic | 575-003101 | For essembling and connection of EEG & GND screws |
| 5 minute epoxy | Bison | Commercially available | regular off-the-shelf epoxy |
| cyanoacrylate glue | Loctite | Super Glue-3 | |
| EEG wire | Science Products GmbH | 7SS-2T | |
| Electrode wire | Science Products GmbH | NC7620F | |
| Ethanol | LC | For standard pre-operative sterilization procedure of drive | |
| Fine forceps (5) | FST | 91150-20 | For wire bundle preperation and handling |
| Form 3B | Formlabs | 3D printer used to 3D print the self-printed parts of the TD drive | |
| Gold pins (small) | Neuralynx, Inc. | 9885 | Attachment of electorde wires to EIB board |
| Ground wire | Science Products GmbH | SS-3T/A | |
| High-density connector | LabMaker GmbH/Omnetics | A79026-001 | |
| Lister Hodded rats | Charles River Laboratories | Crl:LIS | we used male rats, 9-12 weeks of age at arrival |
| M1 brass insert | AliExpress | Commercially available | https://aliexpress.com/item/33047616164.html |
| M1 tap | McMaster | 2504A33 | |
| M1x16 screw | Bossard | 1096613 | |
| M1x3 stainless steel screws | Screws and More | 84213_14985 | |
| M2.5x5 polyimide screws | Screws and more | 7985PA25S_50 | |
| mineral oil | McMaster | 1244K14 | |
| Nail polish | Etos | Commercially available | For color coding EEG and GND wires |
| painter's tape | Gamma | Commercially available | For wire bundle preperation |
| Pin vise | McMaster | 8455A16 | |
| plotting paper | Canson | Commercially available | For wire bundle preperation |
| polyimide tubes | Amazon / Small Parts | TWPT-0159-30-50 | AWG, 0.0159" ID, 0.0219" OD, 0.0030" Wall, 30" Length |
| RHD 32-channel headstage with accelerometer | Intan Technologies, LLC | C3324 | For tethered recordings in the sleepbox |
| RHD 3-ft (0.9 m) standard SPI cables | Intan Technologies, LLC | C3203 | From commutator to headstage |
| RHD 6-ft (1.8 m) standard SPI cables | Intan Technologies, LLC | C3206 | From OpenEphys box to commutator |
| Slip Ring with Flange | Adafruit | 1196 | Commutator: 22 mm diameter, 12 wires |
| Solder flux | Griffon S-39 50 ml | Commercially available | For soldering EEG & GND screws |
| soldering paste | Amazon | B08CBZ5HC5 | |
| stainless steel M2 nut | McMaster | 93935A305 | |
| Tethered recording setup | OpenEphys | Acquasition Board | |
| Wireless recording logger | SpikeGadgets | miniLogger 32 | For wireless recordings in the task |
| Wireless recording setup | SpikeGadgets | Main Control Unit (MCU) incl. breakout board and RF transceiver | For wireless recordings in the task |
Riferimenti
- Deffieux, T., Demené, C., Tanter, M. Functional Ultrasound Imaging: A New Imaging Modality for Neuroscience. Neuroscience. 474, 110-121 (2021).
- Finn, E. S., Poldrack, R. A., Shine, J. M. Functional neuroimaging as a catalyst for integrated neuroscience. Nature. 623 (7986), 263-273 (2023).
- Aharoni, D., Federico Guo, C. Aharoni-Lab/Miniscope-v4: Release for generating. GitHub. , (2023).
- Takasaki, K., Abbasi-Asl, R., Waters, J. Superficial bound of the depth limit of two-photon imaging in mouse brain. eNeuro. 7 (1), (2020).
- Buzsáki, G., et al. Tools for probing local circuits: High-density silicon probes combined with optogenetics. Neuron. 86 (1), 92-105 (2015).
- Lacroix, M. M., et al. Improved sleep scoring in mice reveals human-like stages. bioRxi.v. , (2018).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Sci New Ser. 261 (5124), 1055-1058 (1993).
- Jun, J. J., et al. Fully integrated silicon probes for high-density recording of neural activity. Nature. 551 (7679), 232-236 (2017).
- Headley, D. B., DeLucca, M. V., Haufler, D., Paré, D. Incorporating 3D-printing technology in the design of head-caps and electrode drives for recording neurons in multiple brain regions. J Neurophysiol. 113 (7), 2721-2732 (2015).
- Camba, J. D., Contero, M., Company, P. Parametric CAD modeling: An analysis of strategies for design reusability. Comput Aided Des. 74, 18-31 (2016).
- Kloosterman, F., et al. Micro-drive array for chronic in vivo recording: Drive fabrication. J Vis Exp. (26), e1094 (2009).
- Voigts, J., Siegle, J. H., Pritchett, D. L., Moore, C. I. The flexDrive: An ultra-light implant for optical control and highly parallel chronic recording of neuronal ensembles in freely moving mice. Front Syst Neurosci. 7, (2013).
- Voigts, J., Newman, J. P., Wilson, M. A., Harnett, M. T. An easy-to-assemble, robust, and lightweight drive implant for chronic tetrode recordings in freely moving animals. J Neural Eng. 17 (2), 026044 (2020).
- Sheng, T., et al. A novel 3D-printed multi-driven system for large-scale neurophysiological recordings in multiple brain regions. J Neurosci Methods. 361, 109286 (2021).
- Vöröslakos, M., Petersen, P. C., Vöröslakos, B., Buzsáki, G. Metal microdrive and head cap system for silicon probe recovery in freely moving rodent. eLife. 10, e65859 (2021).
- Mishra, A., Marzban, N., Cohen, M. X., Englitz, B. Dynamics of neural microstates in the VTA-striatal-prefrontal loop during novelty exploration in the rat. bioRxiv. , (2020).
- Allen, L. M., et al. RatHat: A self-targeting printable brain implant system. eNeuro. 7 (2), (2020).
- . Soldering Safety Available from: https://safety.eng.cam.ac.uk/safe-working/copy_of_soldering-safety (2018)
- . Harvard Soldering Safety Guidelines Available from: https://www.ehs.harvard.edu/sites/default/files/soldering_safety_guidelines.pdf (2019)
- Samanta, A., et al. CBD lengthens sleep but shortens ripples and leads to intact simple but worse cumulative memory. iScience. 26 (11), 108327 (2023).
- Machado, F., Malpica, N., Borromeo, S. Parametric CAD modeling for open source scientific hardware: Comparing OpenSCAD and FreeCAD Python scripts. PLOS One. 14 (12), e0225795 (2019).
- Schwarz, C., et al. The head-fixed behaving rat: Procedures and pitfalls. Somatosens Mot Res. 27 (4), 131-148 (2010).
- Gardiner, T. W., Toth, L. A. Stereotactic surgery and long-term maintenance of cranial implants in research animals. Contemp Top Lab Anim Sci. 38 (1), 56-63 (1999).
- França, A. S. C., van Hulten, J. A., Cohen, M. X. Low-cost and versatile electrodes for extracellular chronic recordings in rodents. Heliyon. 6 (9), e04867 (2020).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneEsplora altri articoli
This article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati