
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
تشغيل نظام التصنيع المركب التعاوني (CCM)
In This Article
Summary
يتم تطوير نظام التصنيع المركب التعاوني لوضع الروبوتية من شرائح مركب باستخدام الشريط تقويه. ويسمح النظام المقترح بإنتاج شرائح مركبه ذات مستويات عاليه من التعقيد الهندسي. وتعالج المسائل المتعلقة بتخطيط المسار وتنسيق الروبوتات والمراقبة في الطريقة المقترحة.
Abstract
ان وضع الشريط الألى وآلات وضع ألياف اليه (AFP) توفر بيئة عمل أكثر أمانا وتقلل من كثافة العمالة للعمال مقارنه بالوضع اليدوي التقليدي للألياف. التالي ، فان دقه الإنتاج ، والتكرار وكفاءه التصنيع المركب تحسنت بشكل كبير. ومع ذلك ، فان أنظمه AFP الحالية لا يمكن ان تنتج الا المكونات المركبة مع سطح مفتوح كبير أو أجزاء الثورة بسيطه ، والتي لا يمكن ان تلبي الاهتمام المتزايد في الهياكل الصغيرة المعقدة أو المغلقة من الصناعة.
في هذا البحث ، من خلال توظيف 1 درجه من الحرية (شعبه النهوض بالشعبة) التناوب المرحلة ، والروبوت الموازي 6-RSS ، والروبوت التسلسلي 6-الدائرة العامة ، والبراعة من نظام وكاله فرانس برس يمكن ان تتحسن بشكل كبير لتصنيع أجزاء مركبه معقده. وتستخدم مرحله التناوب التي شنت علي الروبوت موازيه لعقد المغزل والروبوت التسلسلي يحمل رئيس التنسيب لتقليد اثنين من الأيدي البشرية التي لديها ما يكفي من البراعة لوضع ألياف إلى المغزل مع كفاف معقده.
وعلي الرغم من ان نظام CCM يزيد من مرونة التصنيع المركب ، فانه يستهلك وقتا طويلا أو حتى من المستحيل توليد المسار المجدي خارج الخط ، والذي يضمن الوضع الموحد للألياف اللاحقة بالنظر إلى القيود مثل تفردات ، والاصطدامات بين رئيس وضع ألياف والمغزل ، والسلس اتجاه ألياف التغيير والحفاظ علي راس ألياف وضع علي طول القاعدة من سطح الجزء ، الخ. وعلاوة علي ذلك ، ونظرا للخطا الحالي لتحديد المواقع من الروبوتات ، وهناك حاجه إلى تصحيح المسار علي الإنترنت. ولذلك ، يقترح علي الإنترنت خوارزميه التصحيح يطرح لتصحيح مسارات كل من الروبوتات المتوازية والتسلسلية ، والحفاظ علي المسار النسبي بين الروبوتات اثنين دون تغيير من خلال الملاحظات البصرية عند القيد أو مشاكل التفرد في يحدث تخطيط المسار خارج الخط. وتبين النتائج التجريبية ان نظام CCM المصمم يمكن ان يلبي الحركة اللازمة لتصنيع هيكل مركب بشكل Y.
Introduction
وفي الاونه الاخيره ، فان الحاجة المتزايدة إلى هياكل مركبه عاليه الأداء في مختلف الصناعات قد دفعت إلى حد كبير إلى تطوير تكنولوجيات التصنيع المركبة1و2. الإنتاج اليدوي التقليدي لا يمكن ان تلبي الكفاءة العالية والدقة ومتطلبات الجودة للصناعة الناشئة. وقد شجع هذا الجانب علي تطوير تكنولوجيات إنتاج جديده مثل أنظمه وكاله فرانس برس. تكنولوجيا وكاله فرانس برس باتمته إنتاج هياكل المواد المركبة باستخدام prepregs ، والتي هي موجودة في شكل شرائط تتالف من الاشرطه ألياف المشربة (الزجاج والكربون ، وما إلى ذلك) من الراتنج شبه بلمره. في نظام وكاله فرانس برس ، يتم تركيب راس الترسيب مع قدره التدفئة وضغط التشرب الراتنج علي اله التنسيب ألياف أو الروبوت الصناعي. اله وضع ألياف أو الروبوت تحمل رئيس ترسب يضع ما يصل تشرب التي تعبر سطح الاداات المنشدون. في عمليه التصنيع ، يتم استخدام مغزل الاداات كقالب ليكون الجرح حولها من قبل تشرب لتشكيل بنيه معينه من جزء مركب. ستتم أزاله المغزل بعد الشفاء من الجزء. يمكن للانظمه الحالية لوكالة فرانس برس ان تحسن بشكل كبير من كفاءه ونوعيه إنتاج المواد المركبة3،4،5. ومع ذلك ، فهي تقتصر علي إنتاج الأسطح المفتوحة التي تقدم سطح مستو أو أحيط ، أو أجزاء الثورة بسيطه مثل أسطوانات أو المخاريط بسبب عدم كفاية الدائرة العامة للنظام والصعوبات في توليد المسارات. وعلي وجه الخصوص ، فان صناعه الطيران والصناعات الانتاجيه للمعدات الرياضية مهتمة الآن بهذه التقنية لإنتاج الهياكل ذات الهندسي الأكثر تعقيدا ، مثل أنابيب "Y" أو الهياكل التي تشكل حلقات مغلقه مثل إطارات الدراجات.
وللتمكن من تصنيع الهياكل ذات الهندسي المعقدة ، ينبغي تحسين مرونة نظام وكاله فرانس برس. علي سبيل المثال ، تم اقتراح نظام الدائرة الثامنة لوكالة فرانس برس6 عن طريق أضافه مسار خطي إلى 6 الروبوت الصناعية الدائرة الاقتصادية الخاصة ومرحله التناوب إلى منصة القابضة مغزل. ومع ذلك ، فان النظام لا يزال غير مناسب لتصنيع الأجزاء المذكورة أعلاه مع هندسي المعقدة. نظام الروبوتية التعاونية التي تتكون من اثنين من الروبوتات هو حل واعده لزيادة البراعة من خلال توظيف الروبوت واحد لعقد راس ألياف التنسيب في نهاية المعرض والروبوت آخر لعقد المغزل. النظام التعاوني ثنائي السلسلة-الروبوت قد لا يحل مشكله وضع ألياف ، لان الروبوتات التسلسلية تميل إلى تشوه وتفقد الدقة بسبب هيكلها ناتئ ، بالنظر إلى وزن مغزل وقوه الضغط7. مقارنه مع الروبوتات المسلسل ، 6 الروبوتات الموازية الدائرة العامة ، والتي تم استخدامها في جهاز محاكاة الطيران والاداات الطبية ، والتمتع أفضل صلابة ودقه8. ولذلك ، فان نظام الروبوت التعاوني التسلسلي الموازي ، بالاضافه إلى المرحلة التناوبية المركبة علي منصة الروبوت الموازي ، تم بناؤه للتعامل مع تصنيع الهياكل المعقدة في هذه الورقة.
ومع ذلك ، فان النظام الروبوتي التعاوني المبني يؤدي إلى صعوبات في تصميم وحده التحكم لكل روبوت لتلبيه متطلبات الدقة العالية لوضع ألياف. يمكن ان يتحقق قياس الموضع الدقيق للجهة النهائية باستخدام نظام التتبع بالليزر ، والذي يستخدم عاده لتوجيه الروبوت الصناعي في مختلف تطبيقات الحفر الفضائية9،10. علي الرغم من ان نظام تتبع الليزر يمكن ان توفر عاليه قياس موقف دقيقه ، والعيوب الرئيسية تكمن في تكلفه النظام ومشكله انسداد. نظام التتبع بالليزر مكلف ، علي سبيل المثال ، تعقب ليزر تجاري وملحقاته تكلف ما يصل إلى 90000 دولار أمريكي ، وشعاع الليزر هو مسدود بسهوله خلال حركه الروبوتات. ومن الحلول الواعدة الأخرى نظام قياس الرؤية ، الذي يمكن ان يوفر قياسا بالابعاد 6D للمستجيب النهائي بدقه كبيره بتكلفه منخفضه. ويشار إلى تشكل الجمع بين موقف 3D والتوجه 3D للجهة النهائية فيما يتعلق بالإطار الأساسي للروبوت. و CMM البصرية (انظر جدول المواد) هو جهاز استشعار البصرية المستندة إلى كاميرا مزدوجة. من خلال مراقبه العديد من الأهداف العاكسة المرفقة علي القاذفات نهاية اثنين من الروبوتات ، والنسبية يطرح بين الروبوتات يمكن قياسها في الوقت الحقيقي. وقد تم تطبيق CMM البصرية بنجاح علي المعايرة الروبوتية11 وتتبع المسار الديناميكي12 التالي يتم إدخالها لتوفير قياس التغذية المرتدة لأنظمه التحكم في حلقه مغلقه من نظام CCM المقترح في هذه الدراسة.
تعتمد جوده المنتج المركب النهائي إلى حد كبير علي كيفيه إنشاء مسار ألياف الاصليه لوكالة فرانس برس13،14. يتم تنفيذ عمليه إنشاء مسار عاده باستخدام برامج البرمجة خارج الخط. يتكون المسار الذي تم إنشاؤه من سلسله من نقاط العلامات علي مغزل ، والتي تشير إلى تشكل راس موضع ألياف. وخلافا لغيرها من تطبيقات التخطيط مسار مثل ترسب الطلاء ، وتلميع أو بالقطع ، حيث أنواع مختلفه من مسارات التغطية الممكنة ، واختيار محدود في حاله وكاله فرانس برس ، لان ألياف مستمرة وليس من الممكن لأداء مفاجئ التغييرات في الاتجاه (زوايا حاده) دون الاضرار به وينبغي ان تبقي علي راس التنسيب في القاعدة من سطح الأجزاء. وقد تركز التطوير الأول لتقنية توليد مسار لوكالة فرانس برس علي تصنيع لوحات مسطحه كبيره5 قبل التحرك نحو تصنيع الكائنات من الاشكال 3d مثل الأسطح المنحنية المفتوحة أو المخاريط5، 14-ولكن لم توضع منهجيه عمليه لتوليد مسار غير مباشر للأجزاء ذات الهندسي المعقدة مثل الشكل Y أو الاشكال الأخرى. ولذلك ، تم تصميم خوارزميه التخطيط المسار الفعال للأجزاء مع الأسطح أحيط معقده لضمان وضع موحده من ألياف اللاحقة دون ثغرات أو تداخلات في أبحاثنا السابقة15. بالنظر إلى التطبيق العملي وفعالية خوارزميه توليد المسار ، الا ان الروبوت التسلسلي 6-الدائرة العامة مع رئيس التنسيب والدائرة 1-الدائرة الدوارة كحامل مغزل تعتبر النظام المستهدف للعثور علي التخطيط مسار الأمثل في مساحة مشتركه مع معايير الحد الأدنى من الوقت. يمكن ان تكون معقده للغاية وتستغرق وقتا طويلا لتوليد مسار خارج الخط لكامل 13 دائره الاداره العامة CCM بسبب حساب الجسيمات الثقيلة والنظر في القيود المختلفة مثل تفردات ، والاصطدامات ، والاتجاه السلس تغيير الحفاظ علي رئيس التنسيب في القاعدة من أجزاء السطح ، الخ.
التخطيط المقترح خارج خط المسار يمكن ان تولد المرجع مضاعفات لل 6 الروبوت التسلسلي دائره التحقيقات الخاصة ومرحله التناوب علي التوالي مع توقيت دقيق. وحتى مع هذا التخطيط غير المباشر للمسار ، قد يكون من المستحيل توليد مسار مجد في ظل جميع القيود المفروضة علي بعض أجزاء الهندسة. وعلاوة علي ذلك ، فان أخطاء تحديد المواقع من الروبوتات قد تسبب الروبوتات لتصطدم مع مغزل أو جهاز آخر في بيئة العمل. يتم تنفيذ تعديل المسار علي الإنترنت استنادا إلى الملاحظات المرئية من CMM البصرية. ولذلك يقترح علي الخط خوارزميه التصحيح يطرح لتصحيح مسار الروبوت موازيه وضبط أزاحه المقابلة علي مسار الروبوت التسلسلي في وقت واحد من خلال ردود الفعل البصرية. عندما يتم الكشف عن الاصطدام وغيرها من القيود ، والنسبية تشكل بين الروبوتات اثنين يتم أيضا الاحتفاظ بدون تغيير اثناء اتباع المسار الذي تم إنشاؤه خارج الخط. ومن خلال تصحيح المسار المباشر ، يمكن لنظام CCM تجنب هذه النقاط بسلاسة دون اي إنهاء. ونظرا لمرونة الروبوت الموازي ، يمكن إنشاء أزاحه تصحيح 6D فيما يتعلق بالقيود المختلفة. تقدم هذه المخطوطة اجراء عمليات تفصيليه لنظام CCM باستخدام خوارزميه التصحيح علي الإنترنت.
Access restricted. Please log in or start a trial to view this content.
Protocol
1-التعاريف الاطاريه لنظام الذخائر العنقودية
ملاحظه: CMM البصرية هو جهاز استشعار الكاميرا المزدوجة ، والتي يمكن تتبع الكائن مع مجموعه جامده من عاكسات كاهداف في الوقت الحقيقي. ومبدا وضع هذه الأهداف هو ان الأهداف عالقه في المواقع غير المتناظرة بمسافة معينه فيما بينها. الأهداف تحتاج إلى ان تكون ثابته علي الروبوتات أو رئيس التنسيب وتبقي في مجال الرؤية (فوف) من CMM البصرية. يجب ملاحظه أربعه أهداف علي الأقل لكل اطار محدد من قبل CMM البصرية في كل وقت. الإطار الأساسي للروبوت الموازي ، الإطار النهائي للروبوت الموازي ، واطار الاداه للروبوت التسلسلي هي الرمز Fb، ftP، وtS، علي التوالي. وترد تعاريف تلك الأطر في الشكل 1. لأنه يتم إصلاح الإطارات الاساسيه للروبوت المتوازي والروبوت التسلسلي ، يمكن اشتقاق مصفوفة التحويل بين الإطارين الأساسيين بواسطة المعايرة.

الشكل 1 اعداد نظام التصنيع المركب التعاوني (CCM). يتالف الجهاز من ال [CCM] نظامه [6-رسس] اليه موازيه, [1-فست] دوران مرحله, [6-فير] مسلسل اليه, [ا] موضع راس, وال [كمم] بصريه. يتم فرض مغزل علي مرحله التناوب ، ويتم تحميل مرحله التناوب علي الروبوت موازيه. يرجى النقر هنا لعرض نسخه أكبر من هذا الرقم.
{kind=link}
- تعريف الإطار الأساسي للروبوت الموازي
- تحميل ملف تعريف الإطار من خلال البرنامج من CMM البصرية (انظر جدول المواد).
- انقر فوق تحديد المواقع > كشف الأهداف. حدد الأهداف التي يتم إرفاقها علي محركات الروبوت موازيه. انقر فوق قبول لأخذ تلك الأهداف كمرجع لتحديد الموضع للنظام بأكمله.
- في قائمه الكيانات ، انقر فوق الإطار الأساسي وحدد جعل هذا المرجع اطار الأصل.
ملاحظه: الغرض من الخطوة 1.1 هو اتخاذ Fb كاطار مرجعي للنظام بأكمله. يمكن الحصول علي ملف تعريف الإطار في الارتباط التالي: < https://users.encs.concordia.ca/~ wfxie/Jove_program/P3. >.
- تعريف نموذج التتبع الخاص بإطار المنصة النهائية
- حدد نماذج التتبع في منطقه التنقل. انقر فوق الكشف عن الطراز، ثم حدد الأهداف الثابتة علي المنصة النهائية للروبوت الموازي. انقر فوق قبول.
- انقر فوق نموذج الكشف الذي تم إنشاؤه. حدد Up_Frame في القائمة المنسدلة أزاحه الأصل. ثم انقر فوق تطبيق.
ملاحظه: هذه الخطوة هي لاعداد العلاقات الثابتة بين اطار النظام الأساسي النهاية المستجيب FtP والأهداف المرفقة علي منصة النهاية المستجيب. - انقر فوق نموذج الملف-التصدير-التتبع، وادخل اسم ملف لحفظ نموذج التتبع.
- تعريف نموذج التتبع لاطار الاداه
- حدد نماذج التتبع. انقر فوق الكشف عن النموذج، ثم حدد الأهداف الثابتة علي اطار الاداه من الروبوت التسلسلي. انقر فوق قبول.
- انقر فوق نموذج الكشف الذي تم إنشاؤه. حدد Sertoolframe في القائمة المنسدلة لأزاحه الأصل. انقر فوق تطبيق واحفظ نموذج التتبع المحدد.
2. اعداد النظام
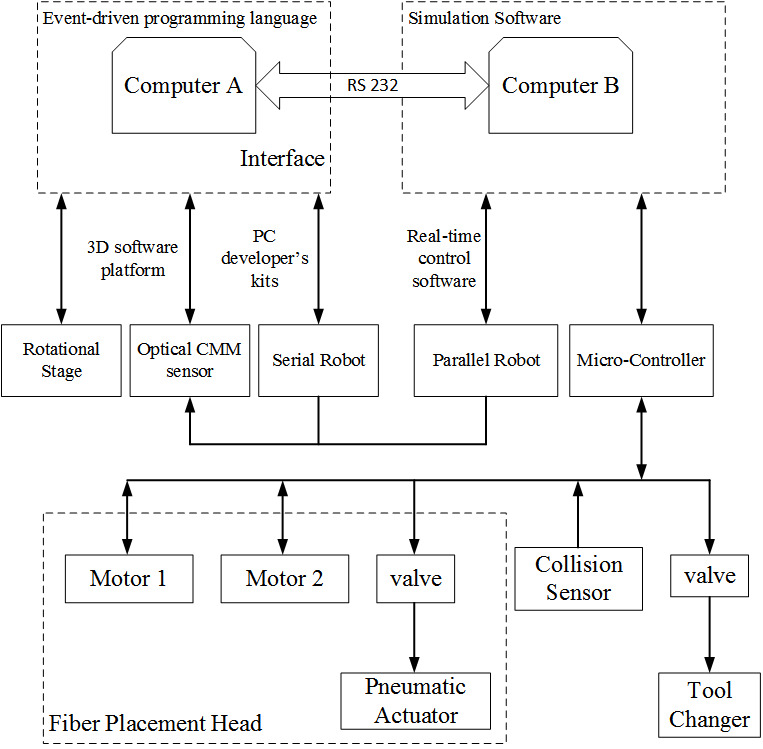
ملاحظه: يظهر تخطيط نظام التحكم لنظام CCM في الشكل 2.

الشكل 2 تخطيط النظام. يتم استخدام جهازي كمبيوتر (A & B) للتحكم في نظام CCM. الاتصال بينهما هو عن طريق RS232. الكمبيوتر A يتحكم في الدولة التناوب ، سينور التصويرية والروبوت التسلسلي. الكمبيوتر B يتحكم في الروبوت الموازي ، والمحركات والصمامات الخ الرجاء انقر هنا لعرض نسخه أكبر من هذا الرقم.
{kind=link}
- اعداد المرحلة التناوبية
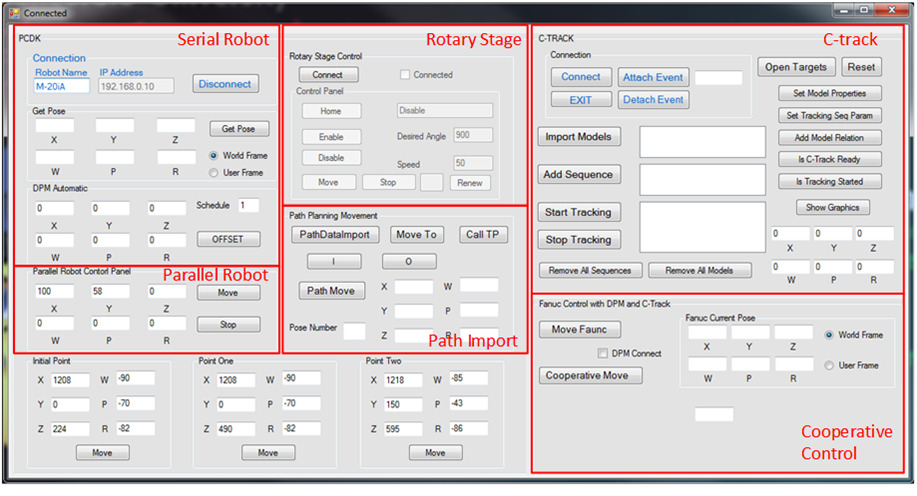
- تحميل واجهه التحكم المتكاملة المبرمجة بواسطة لغة برمجه تستند إلى الحدث علي الكمبيوتر A.
ملاحظه: يتم عرض واجهه عنصر التحكم في الشكل 3. يمكن الحصول علي برنامج واجهه علي الرابط التالي: < https://users.encs.concordia.ca/~ wfxie/Jove_program/بكدككتراك >. - انقر فوق اتصال لتوصيل وحده تحكم مرحله التناوب. انقر فوق تمكين لتوصيل المحرك من مرحله التناوب. ثم انقر فوق الصفحة الرئيسية لتحريك مرحله التناوب إلى موقع المنزل.
- تحميل واجهه التحكم المتكاملة المبرمجة بواسطة لغة برمجه تستند إلى الحدث علي الكمبيوتر A.

الشكل 3 واجهه التحكم. برنامج التحكم المبرمج بواسطة لغة برمجه يحركها الحدث. وتتكون الواجهة من 6 أقسام: الروبوت التسلسلي ، الروبوت الموازي ، مرحله التناوب ، واستيراد المسار ، CMM البصرية والتحكم التعاوني. يرجى النقر هنا لعرض نسخه أكبر من هذا الرقم.
{kind=link}
- اعداد الروبوت التسلسلي
- السلطة علي وحده تحكم الروبوت التسلسلي (انظر جدول المواد).
- انقر فوق الاتصال علي واجهه التحكم المتكاملة لتوصيل خادم الروبوت.
- اعداد CMM البصرية
- السلطة علي وحده تحكم من CMM البصرية والانتظار حتى تظهر شاشه وحده تحكم جاهزه.
- انقر فوق الاتصال علي واجهه التحكم المتكاملة لتوصيل cmm البصرية عبر واجهه برمجه التطبيقات (API).
- استيراد النماذج التي بنيت في القسم 1 ، والذي يتضمن نموذج قاعده ، ونموذج منصة العلوي ونموذج نهاية-العاكس من الروبوت التسلسلي.
- انقر فوق أضافه تسلسل. أضافه التسلسل النسبي بين الطرازات إذا كان ذلك ضروريا. ثم انقر فوق بدء تتبع لتتبع تشكل من النماذج.
- اعداد الروبوت الموازي
- السلطة علي وحده تحكم الروبوت موازيه.
- تحميل برنامج SerialPort_Receive وحدد الوضع العادي .
ملاحظه: لا يمكن التحكم برنامج SerialPort_Receive الروبوت المتوازي مباشره. يتم استخدامه لتلقي البيانات البعيدة من الكمبيوتر A عبر منفذ الاتصال التسلسلي. يمكن الحصول علي برنامج SerialPort_Receive علي الرابط التالي: < https://users.encs.concordia.ca/~ wfxie/Jove_program/SerialPort_Receive >. - تحميل البرنامج Pararemotecontrol وحدد الوضع الخارجي . ثم انقر فوق بناء تزايدي للاتصال بالهدف.
ملاحظه: يتم استخدام برنامج Pararemotecontrol لتلقي تشكل المطلوب من برنامج SerialPort_Receive والتحكم في الروبوت موازيه. يمكن الحصول علي برنامج Pararemotecontrol علي الرابط التالي: < https://users.encs.concordia.ca/~ wfxie/Jove_program/pararemotecontrol. mdl >. - انقر فوق بدء محاكاة البرنامجين لتهيئه وحده تحكم الروبوت المتوازي.
3. توليد مسار خارج الخط
- تحميل واجهه تخطيط المسار من خلال برامج الحوسبة العددية (انظر جدول المواد).
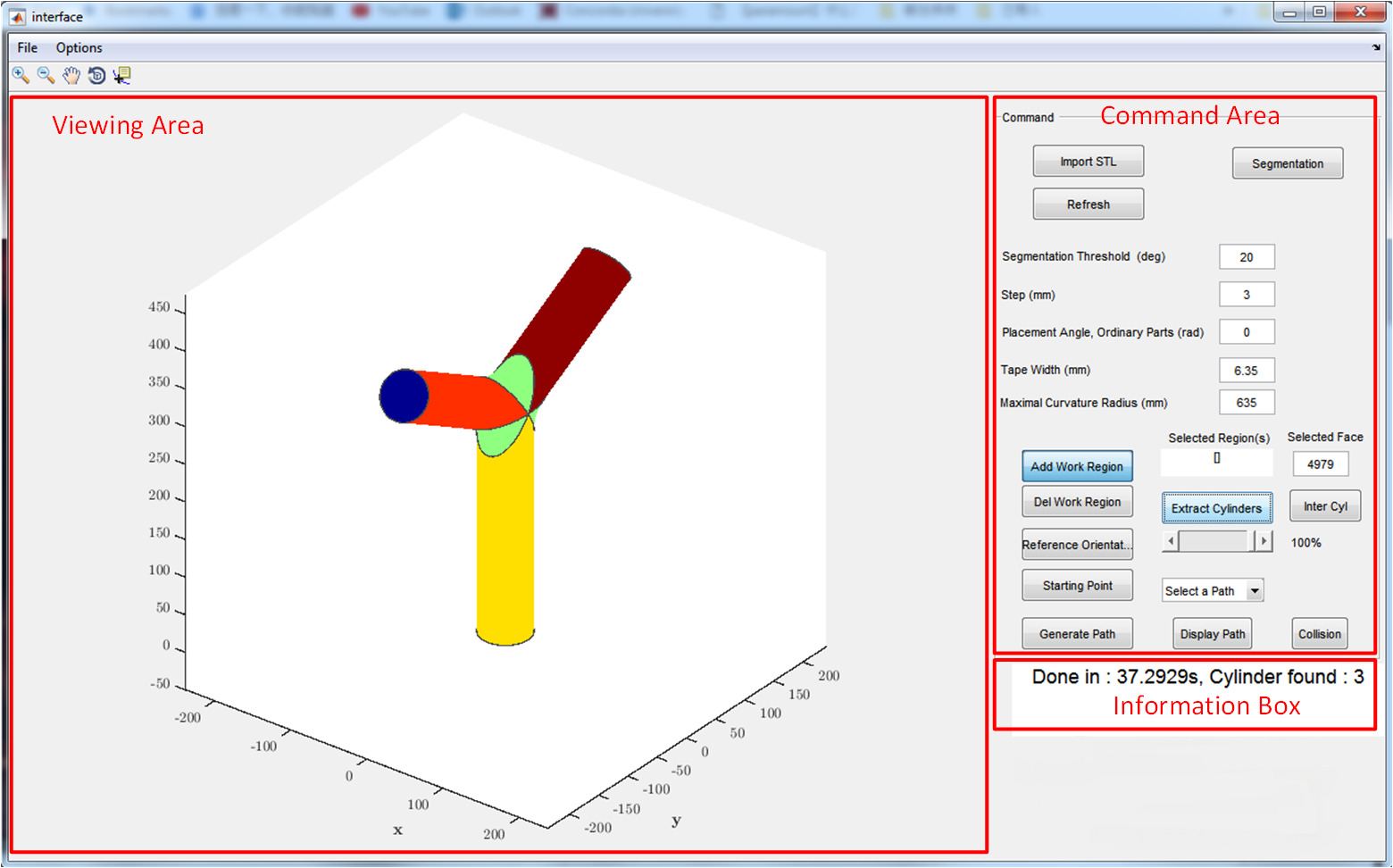
ملاحظه: يتم عرض الواجهة في الشكل 4. واجهه تخطيط المسار هو برنامج خارج الخط لإنشاء مسار النظام ويمكن الحصول عليها علي الرابط التالي: < https://users.encs.concordia.ca/~ wfxie/Jove_program/AFP_PathPlanning_Pcode >.

الشكل 4 واجهه تخطيط المسار. يتكون برنامج تخطيط المسار من 3 أقسام: المنطقة المرئية ومنطقه الأوامر ومربع المعلومات. يسمح قسم "منطقه العرض" بالعرض ثلاثي الابعاد للأجزاء التي ستتم معالجتها. قسم "منطقه الأوامر" لتنفيذ الإجراءات الرئيسية لإنشاء مسار خارج الخط. يعرض القسم "مربع المعلومات" معلومات حول حاله البرنامج. يرجى النقر هنا لعرض نسخه أكبر من هذا الرقم.
{kind=link}
- انقر فوق استيراد STL واختر ملف الجزء. ثم انقر فوق تجزئه.
ملاحظه: ينقسم الجزء إلى مناطق منفصلة (أسطوانات وتقاطعات جزء الشكل Y). يتم عرض المناطق المختلفة بألوان مختلفه. - انقر فوق أضافه منطقه العمل وحدد المنطقة علي استخراج الأسطوانات.
- اضبط شريط التمرير علي 100% وانقر علي استخراج الأسطوانات.
- انقر فوق أضافه منطقه عمل لتحديد فرع البداية للمسار.
- انقر فوق إنشاء مسار. اختر الخيار الثالث: زاوية المواضع الثابتة (CPA) في نافذه الحوار المنبثقة.
- اختر زاوية الموضع المطلوبة 90 درجه في نافذه الحوار المنبثقة. ثم اختر النقطة الحمراء.
- لعرض المسار الذي تم إنشاؤه ، انقر علي تحديد القائمة المنسدلة مسار. ثم حدد المسار.
- لحفظ هذا المسار ، انقر فوق ملف > حفظ وادخل اسم ملف.
4. التحلل الفردي للمسار للروبوت التسلسلي ومرحله التناوب
- تشغيل الدالة Methode_Jacobian في برنامج الحوسبة العددية (انظر جدول المواد).
ملاحظه: يتم استخدام الدالة Methode_Jacobian لتتحلل المسار الذي تم إنشاؤه في الخطوة 3 إلى مسارين الفردية للروبوت التسلسلي ومرحله التناوب. - حدد ملف المسار المطلوب (الذي تم إنشاؤه بواسطة واجهه تخطيط المسار) وانقر فوق فتح.
- ادخل رقم المسار المطلوب.
- ثم تحسب النقطة الاولي من المسار. اختيار التكوين المطلوب للتلاعب للوصول إلى هذه الوضعية.
ملاحظه: عند اكتمال الخطوة 4.4 ، يتم عرض رسم بياني يظهر تطور القيم المشتركة. يتم إنشاء ملف يحتوي علي مسار الروبوت التسلسلي ومرحله التناوب.
5. تشغيل مسار خارج الخط دون خوارزميه تعديل المسار
- اضغط علي تحديد علي قلادة تعليم واختيار اسم الملف المستورد. اضغط Enter لتحميل ملف المسار.
- تحويل التبديل من وحده تحكم الروبوت إلى الوضع التلقائي . تحويل قلادة تعليم تشغيل/إيقاف التبديل إلى إيقاف.
- اضغط علي بدء دوره من وحده تحكم الروبوت التسلسلي لتشغيل المسار.
- انقر فوق الخطوة التعاونية الموجودة في لوحه التحكم التعاونية .
ملاحظه: سيقوم النظام بتنفيذ المسار دون اتصال مع خوارزميه تعديل المسار علي الإنترنت. إذا وصل المشترك إلى شرط التفرد أو القيد ، سيتوقف النظام.
6. تشغيل مسار خارج الخط مع خوارزميه تعديل المسار
- كرر الخطوات 5.1 – 5.3. ثم انقر فوق DPM الاتصال الموجود في لوحه التحكم التعاونية في الشكل 3 لأضافه امكانيه تعديل المسار علي الإنترنت للنظام.
- انقر فوق الخطوة التعاونية الموجودة في لوحه التحكم التعاونية .
ملاحظه: سيقوم النظام بتنفيذ المسار دون اتصال مع خوارزميه تعديل المسار علي الإنترنت. اثناء التنفيذ ، يتم مراقبه قيود التفردات والمفاصل من خلال قياس التشفير للروبوت التسلسلي. يمكن للنظام تمرير نقاط تقييد التفرد أو القيد بسلاسة دون إنهاء.
Access restricted. Please log in or start a trial to view this content.
النتائج
وتهدف التجربة إلى إظهار عمليه تحقيق اقتراح وضع ألياف علي مغزل الشكل Y لنظام CCM المقترح. وتنفذ هذه العملية في ثلاث خطوات: توليد المسار ؛ مسار التحلل ؛ والتفرد وتجنب القيد.
جيل المسير
عاده ، يتم استخدام الاتجاه القياسي في الصناعة ل...
Access restricted. Please log in or start a trial to view this content.
Discussion
وتظهر النتائج التجريبية عمليه التصنيع الخاصة بزوايا التنسيب التي تبلغ 90 درجه في نظام CCM المصمم. المنهجيات المقترحة في هذه الورقة يمكن استخدامها لوضع ألياف مع 0 ° و 45 درجه رقائق وضع زوايا علي مغزل مع Y-الشكل وغيرها من الاشكال. في حين ان وحده تحكم المدمج في الروبوت التسلسلي قادره علي توفير ميز?...
Access restricted. Please log in or start a trial to view this content.
Disclosures
وليس لدي المؤلفين ما يفصحون عنه.
Acknowledgements
تم تمويل هذا المشروع من قبل مجلس العلوم الطبيعية والبحوث الهندسية (NSERC) كرسي البحوث الصناعية الكندية في تصنيع المركبات المؤتمتة والبحث عن الأبحاث في كيبيك-Natrue et تكنولوجيات (FRQNT).
Access restricted. Please log in or start a trial to view this content.
Materials
| Name | Company | Catalog Number | Comments |
| AeroBasic | Aerotech | Motion control software | |
| Collaborative Composite Manufacturing (CCM) System | Concordia University | A CCM system is proposed to manufacture more complex composite components which pose high demand for trajectory planning than those by the current AFP system. The system consists of a 6 degree-of-freedom (DOF) serial robot holding the fiber placement head, a 6-DOF revolute-spherical-spherical (RSS) parallel robot on which a 1-DOF mandrel holder is installed and an eye-to-hand optical CMM sensor, i.e. C-track, to detect the poses of both end-effectors of parallel robot and serial robot. | |
| C-track | Creaform Inc. | An eye-to-hand optical CMM sensor | |
| Fanuc M-20iA | Fanuc Inc. | Serial robot | |
| Matlab | MathWorks | A multi-paradigm numerical computing software | |
| Quanser | Quanser Inc. | Providing the engineering lab equipments for teaching and research. | |
| VB | Microsoft | Visual Basic | |
| Vxelements | Creaform Inc. | Software for C-track |
References
- Groppe, D. Robots Improve the Quality and Cost-effectiveness of Composite Structures. Industrial Robot: An International Journal. 27 (2), 96-102 (2000).
- Ahrens, M., Mallick, V., Parfrey, K. Robotic Based Thermoplastic Fibre Placement Process. Industrial Robot: An International Journal. 25 (5), 326-330 (1998).
- hirinzadeh, B., Cassidy, G., Oetomo, D., Alici, G., Ang, M. H. Jr Trajectory generation for open-contoured structures in robotic fibre placement. Robotics and Computer-Integrated Manufacturing. 23 (4), 380-394 (2007).
- Shirinzadeh, B., Foong, C. W., Tan, B. H. Robotic fibre placement process planning and control. Assembly Automation. 20 (4), 313-320 (2000).
- Shirinzadeh, B., Alici, G., Foong, C. W., Cassidy, G. Fabrication process of open surfaces by robotic fibre placement. Robotics and Computer Integrated Manufacturing. 20 (1), 17-28 (2004).
- Coriolis. , Available from: http://www.coriolis-composites.com/ (2011).
- Dasgupta, B., Muthyunjaya, T. S. The Stewart platform manipulator: a review. Mechanism and Machine Theory. 35 (1), 15-40 (2000).
- Zhang, X. M., Xie, W. F., Hoa, S. V., Zeng, R. Design and Analysis of Collaborative Automated Fiber Placement Machine. International Journal of Advanced Robotics and Automation. 1 (1), 1-14 (2016).
- Shirinzadeh, B., et al. Laser interferometry-based guidance methodology for high precision positioning of mechanisms and robots. Robotics Computer-Integrated Manufacturing. 26 (1), 74-82 (2010).
- Vincze, M., Prenninger, J. P., Gander, H. A laser tracking system to measure position and orientation of robot end effectors under motion. International Journal of Robotics Research. 13 (4), 305-314 (1994).
- Li, P., Zeng, R., Xie, W., Zhang, X. Relative posture-based kinematic calibration of a 6-RSS parallel robot by optical coordinate measurement machine. International Journal of Advanced Robotic Systems. 15 (2), (2018).
- Shu, T., Gharaaty, S., Xie, W. F., Joubair, A., Bonev, I. Dynamic path tracking of industrial robots with high accuracy using photogrammetry sensor. IEEE/ASME Transactions on Mechatronics. 23 (3), 1159-1170 (2018).
- Shirinzadeh, B., Cassidy, G., Oetomo, D., Alici, G., Ang, M. H. Jr Trajectory generation for open-contoured structures in robotic fibre placement. Robotics and Computer-Integrated Manufacturing. 23 (4), 380-394 (2007).
- Blom, A. W., Abdalla, M. M., Gürdal, Z. Optimization of course locations in fiber-placed panels for general fiber angle distributions. Composites Science and Technology. 70 (4), 564-570 (2010).
- Hély, C., Birglen, L., Xie, W. F. Feasibility study of robotic fibre placement on intersecting multi-axial revolution surfaces. Robotics and Computer-Integrated Manufacturing. 48, 73-79 (2017).
- Zhang, X. M., Xie, W. F., Hoa, S. V. Semi-offline trajectory synchronized algorithm of the cooperative automated fiber placement system. Robotics and Computer–Integrated Manufacturing. 51, 53-62 (2018).
- Robotics America Corporation. FANUC Robotics SYSTEM R-30iB Handling Tool Setup and Operations Manual. Fanuc. , 1686-1692 (2012).
Access restricted. Please log in or start a trial to view this content.
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved