
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
التصوير الشعاعي بالفيديو ثنائي المستوى لدراسة الرسغ والمفاصل الزندية الراديوية البعيدة
In This Article
Summary
التصوير الشعاعي بالفيديو ثنائي المستوى (BVR) هو تقنية تصوير متقدمة لفهم الحركة ثلاثية الأبعاد لعظام الهيكل العظمي والغرسات. من خلال الجمع بين أحجام الصور القائمة على الكثافة والصور الشعاعية بالفيديو للطرف العلوي البعيد ، يتم استخدام BVR لدراسة الحركة في الجسم الحي للمعصم والمفصل الزندي الراديوي البعيد ، بالإضافة إلى تقويم مفصل المفاصل.
Abstract
يعد القياس الدقيق لحركية الهيكل العظمي في الجسم الحي أمرا ضروريا لفهم وظيفة المفصل الطبيعية ، وتأثير علم الأمراض ، وتطور المرض ، وآثار العلاجات. قدمت أنظمة القياس التي تستخدم علامات سطح الجلد لاستنتاج حركة الهيكل العظمي نظرة ثاقبة مهمة للحركية الطبيعية والمرضية ، ومع ذلك ، لا يمكن تحقيق مفصل دقيق باستخدام هذه الأنظمة ، خاصة أثناء الأنشطة الديناميكية. في العقدين الماضيين ، مكنت أنظمة التصوير الشعاعي بالفيديو ثنائية المستوى (BVR) العديد من الباحثين من دراسة حركية الهيكل العظمي للمفاصل بشكل مباشر أثناء أنشطة الحياة اليومية. لتنفيذ أنظمة BVR للطرف العلوي البعيد ، يتم الحصول على الصور الشعاعية بالفيديو لنصف القطر البعيد واليد من مصدرين معايرين للأشعة السينية بينما يقوم الشخص بمهمة معينة. يتم حساب مواضع الجسم الصلب ثلاثية الأبعاد (3D) من الصور الشعاعية بالفيديو عبر تسجيلات أفضل ملاءمة لإسقاطات النموذج ثلاثي الأبعاد إلى كل عرض BVR. النماذج ثلاثية الأبعاد عبارة عن أحجام صور قائمة على الكثافة للعظم المحدد المستمدة من بيانات التصوير المقطعي المحوسب المكتسبة بشكل مستقل. باستخدام وحدات معالج الرسومات وأنظمة الحوسبة عالية الأداء ، يظهر نهج التتبع القائم على النموذج هذا سريعا ودقيقا في تقييم الميكانيكا الحيوية للمعصم والمفاصل الزندية الراديوية البعيدة. في هذه الدراسة ، قمنا أولا بتلخيص الدراسات السابقة التي أثبتت اتفاق BVR دون المليمتري والدرجة الفرعية مع نظام التقاط الحركة البصرية في المختبر في تقييم حركية المعصم والمفصل الزندي الإشعاعي البعيد. علاوة على ذلك ، استخدمنا BVR لحساب سلوك مركز دوران مفصل الرسغ ، لتقييم نمط المفصل لمكونات الغرسة على بعضها البعض ، ولتقييم التغيير الديناميكي للتباين الزندي أثناء ضخ الساعد. في المستقبل ، يمكن التقاط عظام الرسغ بمزيد من التفصيل مع إضافة أجهزة الكشف عن الأشعة السينية ذات اللوحة المسطحة ، أو المزيد من مصادر الأشعة السينية (أي التصوير الشعاعي بالفيديو متعدد المستويات) ، أو خوارزميات الرؤية الحاسوبية المتقدمة.
Introduction
يعد القياس الدقيق لحركية الهيكل العظمي في الجسم الحي ضروريا لفهم وظيفة المفاصل السليمة والبديلة ، وتأثير علم الأمراض ، وتطور المرض ، وآثار العلاجات. يعد تحديد حركية الهيكل العظمي بشكل غير جراحي على سطح المفصل (التهاب المفاصل) أمرا بالغ الأهمية لفهم أمراض المفاصل وأمراضها ، مثل هشاشة العظام ، ولكنه يمثل تحديا تقنيا. في السابق ، قدمت التقنيات التي تستخدم علامات سطح الجلد لاستنتاج حركة الهيكل العظمي نظرة ثاقبة مهمة حول الحركية الصحية والمرضية. ومع ذلك ، لا يمكن تحقيق علم المفاصل الدقيق باستخدام هذه التقنيات ، خاصة أثناء الأنشطة الديناميكية مثل أنشطة الحياة اليومية. هذه الأنظمة البصرية محدودة بطبيعتها في الدقة بسبب حركة الجلد بالنسبة للعظام الأساسية ، وهي المصدر الرئيسي للخطأ في تحليل الحركة البشرية1،2.
الطرق الحديثة الحالية لقياس حركية الهيكل العظمي ثلاثي الأبعاد (3D) هي التتبع المستند إلى الصور ، وهي التصوير الشعاعي بالفيديو ثنائي السطح (BVR) 3 والتصوير المقطعي المحوسب التسلسلي (CT) الأحجام4 والتصوير بالرنين المغناطيسي (MRI) 5. على الرغم من أن التقنيات العادية القائمة على التصوير المقطعي المحوسب والتصوير بالرنين المغناطيسي ثلاثية الأبعاد دقيقة للغاية ويمكن الوصول إليها في العديد من المستشفيات في جميع أنحاء العالم ، إلا أنها غير قادرة على قياس الحركة الديناميكية للمفاصل. تم تطوير تقنيات التصوير مثل المسح المقطعي المحوسب4D 6 والتصوير بالرنين المغناطيسيالديناميكي 7 في السنوات الأخيرة لحل هذا القصور. ومع ذلك ، فإن هذه الطرق إما تعرض المرضى لجرعة إشعاعية عالية أو تعاني من دقة زمنية منخفضة.
من خلال الجمع بين خوارزميات الرؤية الحاسوبية الجديدة وأنظمة الأشعة السينية التقليدية ، ثبت أن BVR دقيق للمفاصل المتعددة في والبشر. تم حلها إما باستخدام خوارزميات التتبع المستندة إلى العلامة أو المستندة إلى النموذج. تتعقب الأساليب القائمة على العلامات حبات التنتالوم التي يتم إدخالها في العظام أو الأنسجة الرخوة وهي مثالية للاختبار على وفي المختبر. ومع ذلك ، فهي غازية باهظة للأبحاث البشرية في الجسم الحي . لحسن الحظ ، توفر التحسينات في خوارزميات التتبع المستندة إلى النموذج بديلا قابلا للتطبيق. تتضمن مناهج تتبع BVR المستندة إلى النموذج في البشر إعداد مجموعات الصور الحجمية المكتسبة بواسطة التصوير المقطعي المحوسب أو التصوير بالرنين المغناطيسي في وضع ثابت والتقاط حركات الاهتمامات في مجال رؤية اثنين من الأشعة السينية. تقوم معظم تطبيقات التتبع المستندة إلى النموذج بعد ذلك بإنشاء صور شعاعية معاد بناؤها رقميا (DRR) للعظم أو الغرسة من صور التصوير المقطعي المحوسب أو التصوير بالرنين المغناطيسي الثابت ومطابقتها مع الصور الشعاعية بالفيديو المحسنة بالميزات باستخدام المقاييس التي توضح التشابه بين DRRs والصور الشعاعية بالفيديو8. تسمى هذه العملية "تتبع" العظم أو الزرع.
متغيرات الإخراج الأساسية لتتبع العظام أو الغرسات هي حركية الجسم الصلبة ، والتي يمكن من خلالها حساب حركية المفاصل ، واستطالة الأربطة9،10 ، وتباعد المفاصل كبديل لسمك الغضروف11 ، والتلامس المشترك12،13 ، والمؤشرات الحيوية الأخرى. في الآونة الأخيرة ، قمنا بتوثيق دقة تتبع BVR المستند إلى النموذج في حساب الميكانيكا الحيوية للمعصم ، وتقويم مفصل الرسغ الكلي (TWA) ، والمفصل الزندي الإشعاعي البعيد (DRUJ) 14،15. في القسم التالي ، يتم تقديم بروتوكول مفصل لهذه الطريقة التي تم التحقق من صحتها لدراسة حركة الرسغ الهيكلي وتقويم مفصل الرسغ الكلي والمفصل الزندي الإشعاعي البعيد أثناء المهام المختلفة. نقوم بتقسيم أحجام الصور القائمة على الكثافة للعظام والغرسات من أحجام صور التصوير المقطعي المحوسب ، وتتبع أحجام الصور الجزئية هذه داخل الصور الشعاعية بالفيديو ، وتحديد النتائج مثل مركز الدوران ونمط التلامس والتباين الزندي لإثبات نقاط القوة والقيود في هذه الطريقة.
Protocol
تمت الموافقة على هذه الدراسة من قبل مجلس المراجعة المؤسسية (IRB) لمستشفى Lifespan - Rhode Island ، وهو IRB معتمد من AAHRPP. قدم ما مجموعه 16 مريضا موافقة مستنيرة موقعة وفقا للإرشادات المؤسسية.
1. الحصول على البيانات
- التصوير المقطعي المحوسب (CT)
- تحضير العينات أو الموضوعات للتصوير المقطعي المحوسب.
ملاحظة: لتقييم الدقة، تم استخدام 14،15 ، 6 ساعدين سليمين من أربع عينات من الجثث السليمة (70.5 ± 12.3 سنة ، 4 حقوق ، 2 أنثى) و 1 ساعد (49 عاما ، يمين ، أنثى) مع تقويم مفصل الرسغ الكلي. بالنسبة للدراسة في الجسم الحي 16 ، تم تسجيل 10 متطوعين يتمتعون بمعصمين سليمين (57.0 ± 5.2 سنوات ، وثماني إناث ، وتسع معصمين مهيمنين) ، و 6 مرضى (74.7 ± 5.6 سنوات ، امرأتان ، اثنتان يمينتان ، أربعة معصمين مهيمنين) خضعوا لتقويم مفصل الرسغ الكلي. - لتصوير كل موضوع4 ، احصل على فحص بالأشعة المقطعية للساعد البعيد بقطر جمع بيانات 25 سم وأعد بناؤه بمجال رؤية 20 سم باستخدام خوارزمية الالتفاف Bone Plus باستخدام ماسح التصوير المقطعي المحوسب السريري المكون من 16 شريحة. استخدم إعدادات الأنبوب 80 كيلو فولت و 80 مللي أمبير. الحد من تعرض الساعد إلى حوالي 7 سم قريب من سطح نصف القطر البعيد إلى الكتائب البعيدة.
ملاحظة: في هذه الدراسة ، كانت أبعاد فوكسل للصورة 0.39 × 0.39 مم2 في المستوى العرضي للساعد ، و 0.625 مم على طول المحور الطويل للساعد. - نقل صور التصوير المقطعي المحوسب المكتسبة إلى كمبيوتر المختبر باستخدام بروتوكول معتمد من HIPPA بتنسيق التصوير الرقمي والاتصالات في الطب (DICOM).
- تحضير العينات أو الموضوعات للتصوير المقطعي المحوسب.
- التصوير الشعاعي بالفيديو ثنائي المستوى (BVR)
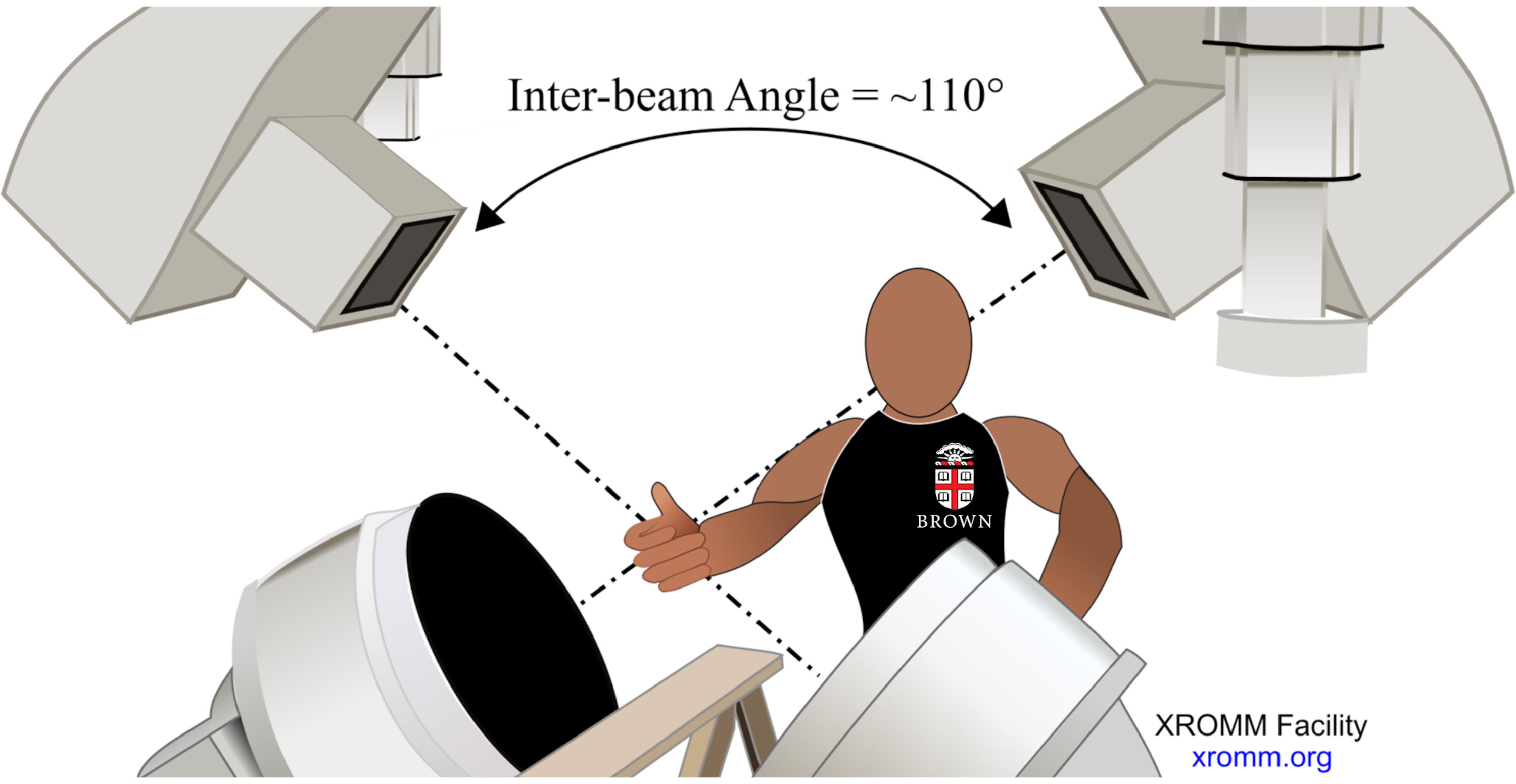
- الإعداد التجريبي (الشكل 1). لتمكين قطر مجال الرؤية القادر على التقاط نصف القطر البعيد ، والزند البعيد ، وعظام الرسغ ، والمشط بالإضافة إلى منظور لتقليل الانسداد العظمي في أوضاع الرسغ المختلفة ، ضع مكثفات الصورة (IIs) أسفل الساعدين ، واضبط الزاوية بينهما عند 110 درجة (مصادر الأشعة السينية موجهة لأسفل إلى IIs المقابلة باتجاه 55 درجة بالنسبة للأرض).
- قم بإنشاء الأشعة السينية في الوضع المستمر مع إعداد تعريض يتراوح بين 65 إلى 75 كيلو فولت ، اعتمادا على رؤية العظام / الغرسة ، و 80 مللي أمبير. اضبط المسافات من المصدر إلى الصورة لكل من أزواج الأشعة السينية II عند 130 سم تقريبا، والمسافات من المصدر إلى اليد عند 90 سم.
ملاحظة: في هذه الدراسة ، ارتدى الأشخاص مئزرا واقيا من الرصاص بالأشعة السينية ، وغطاء رقبة لدرع الياقة الغدة الدرقية ، ومقياس جرعات رقمي في المختبر. كان جميع الباحثين يقفون خلف زجاج واقي من الرصاص أثناء التجربة. - ضع حامل أو هيكل مشابه بين IIs ، واستخدمه لوضع العناصر (على سبيل المثال ، مقبض الباب ، المطرقة ، الإبريق) للأشخاص.
- قم بإنشاء الأشعة السينية في الوضع المستمر مع إعداد تعريض يتراوح بين 65 إلى 75 كيلو فولت ، اعتمادا على رؤية العظام / الغرسة ، و 80 مللي أمبير. اضبط المسافات من المصدر إلى الصورة لكل من أزواج الأشعة السينية II عند 130 سم تقريبا، والمسافات من المصدر إلى اليد عند 90 سم.
- الإعداد التجريبي (الشكل 1). لتمكين قطر مجال الرؤية القادر على التقاط نصف القطر البعيد ، والزند البعيد ، وعظام الرسغ ، والمشط بالإضافة إلى منظور لتقليل الانسداد العظمي في أوضاع الرسغ المختلفة ، ضع مكثفات الصورة (IIs) أسفل الساعدين ، واضبط الزاوية بينهما عند 110 درجة (مصادر الأشعة السينية موجهة لأسفل إلى IIs المقابلة باتجاه 55 درجة بالنسبة للأرض).

الشكل 1. الإعداد التجريبي. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
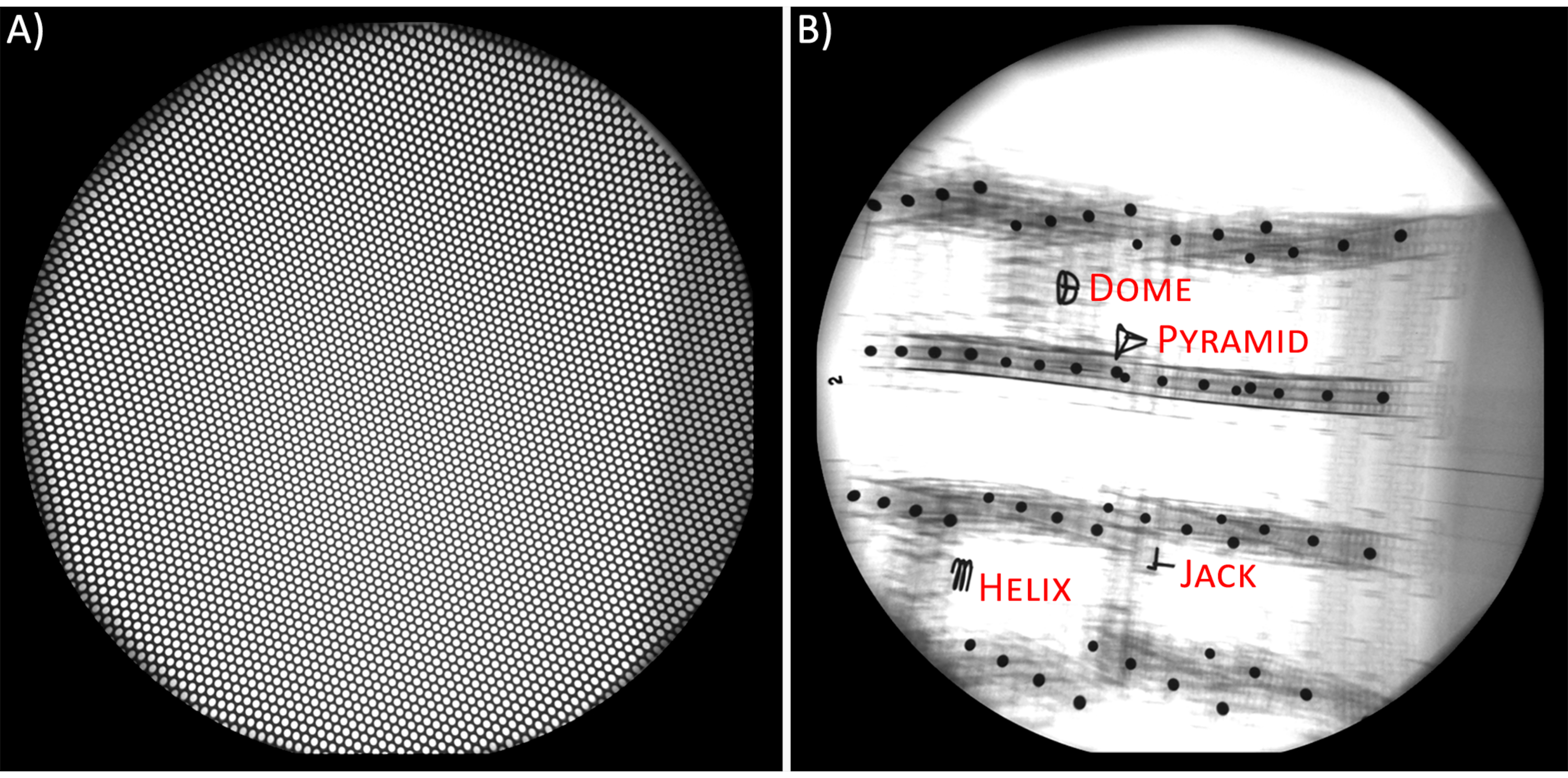
- شبكة عدم التشويه (الشكل 2 أ). نظرا لأن المجالات الكهرومغناطيسية الخارجية تؤثر على سلوك حزم الأشعة السينية (أي مسارات الإلكترون) ، فإن الصور الشعاعية تعاني من وسادة غير خطية وتشوهات على شكل حرفS 17. لإزالة هذه التشوهات ، استخدم صورة لقطعة مسطحة من الصفائح المعدنية المثقبة بدقة (أي شبكة غير مشوهة)18،19. ضع شبكات غير مشوهة على IIs والتقط صورها قبل وبعد بيانات التصوير الشعاعي بالفيديو. احفظ هذه الصور كصور TIFF 8 بت لكل من مصادر الأشعة السينية.
- المعايرة (الشكل 2 ب). تعد معايرة مصادر الأشعة السينية ضرورية لحساب الإحداثيات ثلاثية الأبعاد للأجسام (العظام أو الغرسات)20. استخدم صورا لكائن ثلاثي الأبعاد بهندسة معروفة ، والذي يحتوي على كرات راديو غير شفافة متباعدة بانتظام ، لتوليد علاقة بين موقع مصدر الأشعة السينية واتجاهه في الفضاء ثلاثي الأبعاد ومساحة الصورة (أي الصور الشعاعية). الجسم التكعيبي (أي مكعب المعايرة) المصنوع من صفائح الأكريليك والفواصل ذات الكرات الفولاذية فعال ودقيق لإعدادات BVR19.
- التقاط الصور الشعاعية لمكعب المعايرة18 في اتجاهات مختلفة 4 مرات قبل إجراء التجربة و 4 مرات بعد التجربة. تعمل معايرة ما بعد التجربة على تأكيد أن الإعداد التجريبي لم يتغير طوال التجربة. احفظ جميع الصور كصور TIFF 8 بت لكلا مصدري الأشعة السينية.

الشكل 2. أ) شبكة غير مشوهة. ب) مكعب المعايرة والعناصر المرجعية له. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- وصف المهام. حدد المهام المختلفة لالتقاط حركة المعصم أثناء تمديد الانثناء والانحراف الشعاعي الزندي والتطويف16. صف مهام حركة DRUJ على أنها دوران الساعد من وضعية الإمساك إلى الكب الكامل أو إلى الاستلقاء الكامل المعرف بأنه دوران مقبض باب مقبض T في اتجاه عقارب الساعة وعكس اتجاه عقارب الساعة21. احصل على صور شعاعية بالفيديو للمعصم في وضعه المحايد (أي مهمة ثابتة محايدة). التقط الوضع المحايد مع الجزء الخلفي من اليد متحدو المستوى مع الجزء الخلفي من الساعد.
ملاحظة: في وضع البداية لجميع المهام ، كان الكتف في حالة تقريب ، وكان الكوع مدعوما على مستوى المفصل ، وكان الساعد غير مقيد وفي دورانه المحايد. تم وصف مهام تمديد الانثناء والانحراف الزندي الشعاعي بأنها دوران راحة اليد بالنسبة إلى الجانبين الظهري الشعاعي والزندي الشعاعي لليد ، على التوالي. تم وصف التحويف بأنه حركة المعصم التي تهدف إلى تحقيق أقصى نطاق حركة نشط في كل اتجاه. - الحصول على التصوير الشعاعي بالفيديو. احصل على صور شعاعية بالفيديو بمعدل 200 هرتز مع ضبط سرعة مصراع الكاميرا على 500 ميكرو ثانية. سجل ثانيتين من التصوير لكل مهمة للحصول على 2 تكرار. قم بتخزين الصور الشعاعية بالفيديو التي تم الحصول عليها من كل مصدر للأشعة السينية كفيديو CINE بتنسيق 8 بت.
ملاحظة: في هذه الدراسة ، كانت الصور الشعاعية 1760×1760 بكسل في حجم الصورة ودقة تبلغ حوالي 0.22 مم ×0.22 مم لكل بكسل.
ملاحظة: تحتوي مصادر الأشعة السينية الحالية على خيار تكبير مجال الرؤية (FOV). ومع ذلك ، في هذه الدراسة ، لم يتم استخدام الوضع المكبر الذي توفره الأجهزة. استنادا إلى وصف المهمة ، قد تمكنك هذه الإمكانية من الحصول على مخرجات عالية الدقة. إذا تم استخدام هذه الميزة، فيجب التقاط خطوات Undistortion Grid و Calibration في هذا الوضع.
- التقاط الحركة البصرية (OMC) - دراسة الدقة
- استخدم بروتوكول الحصول على بيانات التقاط الحركة البصرية (OMC) الموصوف في الدراسات السابقة14،15. قم بإرفاق مجموعتين من العلامات مباشرة ، كل منهما بأربع كرات علامة عاكسة للرجعية بقطر 9.5 مم ، بعظام المشط ونصف القطر الثالثة. التقط حركة العلامة باستخدام 8 كاميرات لالتقاط الحركة البصرية. مزامنة بدء الحصول على بيانات OMC مع BVR بواسطة مشغل خارجي منخفض نشط.
2. معالجة البيانات
- التصوير المقطعي المحوسب (CT)
- إخفاء هوية DICOM. إخفاء هوية DICOMs واستيرادها إلى برنامج معالجة الصور للنمذجة ثلاثية الأبعاد (على سبيل المثال ، Mimics Materialise). في برنامج Mimics Materialise، من شريط أدوات الملف ، افتح نافذة إخفاء الهوية . عند فتح النافذة الجديدة ، حدد إخفاء هوية جميع الصور من علامة التبويب اليسرى ، واضغط على زر إخفاء الهوية في أسفل اليمين.
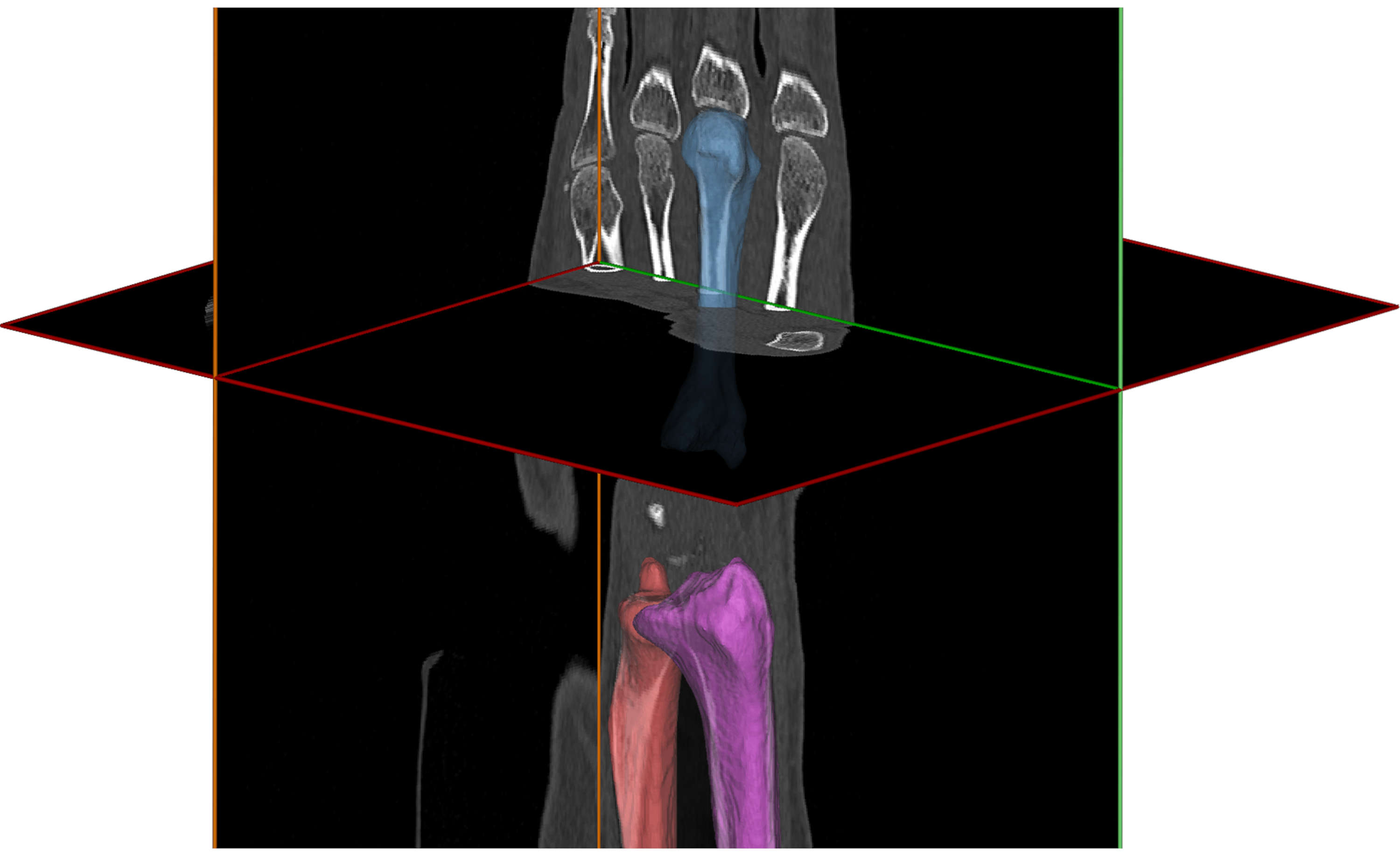
- التجزئة (الشكل 3). قم بتقسيم العظام أو الغرسات ذات الأهمية باتباع منهجية موصوفةسابقا 16،22،23.
- باختصار، من شريط أدوات الشريحة، حدد خيار Threshold، واختر مجموعات العتبة المحددة مسبقا ل Bone عند فتح النافذة. بعد إنشاء القناع ذي العتبة، استخدم خيار Split Mask، وقم بطلاء مناطق العظام أو مكونات الزرع يدويا.
- عندما تكون جميع المناطق ملونة ، انقر فوق موافق وانتظر حتى يقوم البرنامج بإنشاء الأقنعة لكل عظم ومكون الزرع تلقائيا. تحقق من جميع الأقنعة للتأكد من أنها تغطي المناطق المقصودة بالكامل. إذا لم يكن الأمر كذلك ، فاستخدم خيار تحرير الأقنعة لتعديل المناطق يدويا وواحدا تلو الآخر.
ملاحظة: لدراسة مفصل الرسغ ، يجب تقسيممشط القدم 2 و 3 وعظام نصف القطر وفصلها عن باقي العظام. اختياريا ، يمكن تقسيم العظام والعظام الأخرى لمراحل ما بعد المعالجة.
ملاحظة: لدراسة DRUJ ، يجب تقسيم نصف القطر والزند وفصلهما عن باقي العظام.
ملاحظة: بالنسبة للغرسات ، يجب تقسيم المكون الشعاعي والمكون الرسغي بمساميره.

الشكل 3. صورة التصوير المقطعي المحوسب للمعصم والنماذج المعاد بناؤها من نصف القطر ، مشط القدم الثالث ، والزند. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- التجزئة - مكون شعاعي فقط. نظرا للقطع الأثرية الخطية القائمة على الكثافة لسطح المكون الشعاعي في صور التصوير المقطعي المحوسب ، لا يمكن تقسيم نموذج المكون الشعاعي من الصور. وبالتالي ، استخدم نموذج CAD أو ماسح ضوئي سطحي ثلاثي الأبعاد لإنشاء نموذج ثلاثي الأبعاد للمكون الشعاعي المزروع. قم بتسجيل هذا النموذج في التجزئة التقريبية للمكون الشعاعي باستخدام طريقة Mimics Materialise الافتراضية.
ملاحظة: في هذه الدراسة ، استخدمنا ماسحا ضوئيا للسطح بدقة 0.1 مم. تم وضع الغرسة على طاولة ، وتم تحريك الماسح الضوئي ثلاثي الأبعاد يدويا حول الغرسة لالتقاط جميع الأسطح الخارجية. - وحدات تخزين جزئية للصور. يتطلب برنامج التتبع مجموعة مجزأة من الاهتمامات ليتم إدخالها كحجم صورة قائم على الكثافة. لإنشاء وحدة التخزين الجزئية هذه، قم بإنشاء قناع كامل لوحدة تخزين الصورة التي تحتوي على جميع القيم الرمادية عن طريق تحديد الخيار Threshold من شريط أدوات Segment . اضبط قيم العتبة من الحد الأدنى إلى الحد الأقصى للقيم الرمادية.
- بعد ذلك ، استخدم خيار المشغلين المنطقيين ، واطرح الحجم المجزأ للعظم أو الغرسة ذات الأهمية من القناع الكامل الذي تم إنشاؤه. قم بتغيير لون قناع وحدة التخزين الجزئية هذه إلى الأسود (RGB: 0.0/0.0/0.0) لأن برنامج التسجيل يقبل وحدات تخزين الصور ذات التدرج الرمادي فقط. قم بتصدير القناع باعتباره DICOM عن طريق تحديد تصدير DICOM ... في البرنامج. الإخراج هو حجم صورة للعظم المعزول أو الغرسة.
- نماذج ثلاثية الأبعاد. قم بتحويل الأقنعة المجزأة إلى نماذج سطح ثلاثية الأبعاد متشابكة مثلثة عن طريق تحديد خيار Calculate 3D ، مع ملف الدقة المثلى. قم بتصدير هذه النماذج بتنسيق VRML ، الذي يحتوي على الموقع ثلاثي الأبعاد للرؤوس (النقاط) وترتيب اتصالاتها. يتم إنشاء النماذج لبناء نظام الإحداثيات والمزيد من التصور.
- المعالجة المسبقة للتصوير الشعاعي بالفيديو
- استيراد XMALab18 . لكل موضوع ، قم بإنشاء نسخة تجريبية جديدة في برنامج XMALab. قم بتعيين مسارات المجلد لصور Undistortion Grid و 8 مجموعات من صور المعايرة في مربع الحوار New Trial .
ملاحظة: إذا تم قلب مصادر الأشعة السينية طوال فترة الالتقاط ، فيجب التحقق من خيار الوجه في برنامج XMALab. - إزالة التشويه. لإزالة تشويه الصور الشعاعية، بعد إنشاء الإصدار التجريبي وفتح البرنامج لصور الشبكة في مساحة عمل Undistortion، انقر فوق الزر Compute Undistortion . يقوم XMALab تلقائيا بتحديد وعرض الصور غير المشوهة للشبكات. بمجرد اكتشاف مراكز جميع الثقوب بواسطة البرنامج ، قم بتغيير مساحة العمل في القائمة العلوية اليسرى إلى مساحة عمل المعايرة . لمزيد من المعلومات وللمساعدة في تصحيح المشكلات المحتملة ، راجع المرجع24.
- معايرة. في هذه المرحلة ، يحدد برنامج XMALab مصفوفات المعايرة. في XMALab ، يتم نمذجة مصادر الأشعة السينية ككاميرات ذات ثقب مع معلمات جوهرية وخارجية ، مثل البعد البؤري ومركز المصدر والمسافات من المصدر إلى الصورة ، ومرحلة المعايرة هي عملية تحدد هذه المقاييس18. للمعايرة، حدد كل عنصر من العناصر المرجعية الأربعة الموضوعة في مكعب المعايرة لجميع مجموعات الصور ولكل طريقة عرض. في الإعداد ، كانت هذه المراجع هي الهرم ، وجاك ، والقبة ، واللولب (الشكل 2 ب). إذا لم يعثر البرنامج على النقاط تلقائيا، فاضغط على حساب المعايرة. بعد معايرة جميع صور المعايرة، حدد تحسين إعداد الكاميرا.
- تصدير مصفوفات المعايرة. بعد التحسين ، قم بفرز جميع مجموعات المعايرة الثمانية (أي المجموعات الأربعة التي تم التقاطها قبل التجربة والمجموعات الأربعة التي تم التقاطها بعد التجربة) وحدد مجموعة الصور بأصغر خطأ غير مشوه. ابحث عن هذه القيمة بالضغط على خيار المعلومات في الزاوية العلوية اليمنى من كل نافذة معايرة. في الصورة ذات الخطأ الأقل ، قم بتصدير الصور عن طريق تحديد خيار MayaCams 2.0 من قائمة تصدير الملفات . لمزيد من المعلومات ولتصحيح المشكلات المحتملة ، راجع المرجع20.
- التصوير الشعاعي بالفيديو غير مشوه. قم بتغيير مساحة العمل إلى تتبع العلامة وقم بتحميل الصور الشعاعية بالفيديو التي تم التقاطها بتنسيق CINE بالضغط على الرمز +. بعد اكتمال عملية التحميل، قم بتصدير الصور التجريبية غير المشوهة عن طريق تحديد صور تجريبية غير مشوهة من قائمة تصدير الملف .
- استيراد XMALab18 . لكل موضوع ، قم بإنشاء نسخة تجريبية جديدة في برنامج XMALab. قم بتعيين مسارات المجلد لصور Undistortion Grid و 8 مجموعات من صور المعايرة في مربع الحوار New Trial .
- التتبع المستند إلى النموذج (الشكل 4)
- تحسين ميزات الصور الشعاعية / DRRs (الشكل 4 أ - ب). يعد تحسين ميزات الصورة باستخدام المرشحات خطوة ضرورية لتحقيق تطابق دقيق. حدد معلمات المرشحات الأربعة ، بما في ذلك التباين (اكتشاف الشدة) ، Sobel (اكتشاف الحافة) ، Gaussian (التعتيم / أكثر سلاسة) ، و Sharpen (تقويم الحواف) في البرنامج. يمكن تحديد هذه المرشحات بالنقر بزر الماوس الأيمن على كائنات Rad Renderer أو DRR Renderer الموضحة في عنصر واجهة المستخدم العلوي الأيسر.
ملاحظة: في هذه الدراسة ، تم تحسين حواف صور العظام على الصور الشعاعية باستخدام مرشح Sobel بعامل مقياس 3 وقيمة مزج 0.4. بالإضافة إلى ذلك ، تم استخدام مرشح تباين مع ألفا (لتباين الصورة) 2.5 ، وبيتا (لسطوع الصورة) 0.9 لتحسين جودة الصور الشعاعية. لمطابقة DRRs مع التصوير الشعاعي ، تم استخدام قيمة شدة الشعاع 0.35 مع مرشح Sobel بقيمة مزج 0.1 وعامل مقياس 1.7. - التهيئة اليدوية. حرك DRR لكل عظم ومكون باستخدام النقطة المحورية الخاصة به لتحقيق أفضل تطابق ممكن بين DRR والصور الشعاعية. تساعد النقطة المحورية المستخدمين على تدوير DRR المحدد وترجمته من عنصر واجهة المستخدم السفلي الأيسر. هذه الخطوة ضرورية لأنه يجب تهيئة موضع العظم أو الغرسة مرة واحدة على الأقل ، وعلى الأقل للإطار الأول ، قبل إجراء التحسين. اضغط W لتحريك DRR في وضع الترجمة واضغط على E لتدوير DRR.
ملاحظة: لا يكون تغيير موقع النقطة المحورية ضروريا عادة، ولكن من الممكن استخدام خيار Move Pivot في شريط الأدوات. - الامثل. اضغط على C أو انقر فوق الزر Track Current من شريط الأدوات للعثور على أفضل تطابق بين DRR والصور الشعاعية. يستخدم الإجراء الافتراضي للبرنامج وظيفة تكلفة الارتباط المتبادل الطبيعي (NCC) وطريقة تحسين سرب الجسيمات وإجراءات الانحدارالبسيط 26،27. تسمى هذه العملية أيضا خطوة المطابقة أو التتبع. يمكن أيضا تنفيذ إجراء التحسين عبر مربع حوار التتبع. للقيام بذلك ، اضغط على خيار مربع حوار التتبع من شريط الأدوات. عند فتح النافذة الجديدة، قم بتغيير من الإطار وإلى الإطار إلى 0، واضغط على موافق.
ملاحظة: NCC هي دالة تقيس التشابه بين الصور الشعاعية وDRRs ، وأظهرت قيمة NCC الأقرب إلى 0 تطابقا أفضل. ومع ذلك ، فإن تحقيق هذه القيمة يعتمد كليا على مرشحات الصور وجودة الالتقاط. يمكن ملاحظة قيمة NCC في "النافذة الطرفية". - عملية المطابقة - التمريرة الأولى. بعد تحسين الإطار الأول تلقائيا ، افتح مربع الحوار التتبع ، وقم بتغيير من الإطار إلى 0 ، وقم بتغيير إلى الإطار إلى آخر رقم إطار (يمكن أن يكون موجودا في أسفل الأيمن). تستخدم عملية المطابقة الافتراضية للبرنامج الإطار الحالي كموضع أولي للحد من مخاطر الكوارث لعملية المطابقة. تستخدم عملية التحسين طريقة تحسين سرب الجسيمات (PSO) في منطقة 3 مم و 3 درجات من الموضع الأولي.
- عملية المطابقة - التمرير النهائي (الشكل 4 ج). نظرا لأن عملية المطابقة التلقائية قد تفشل بسبب ضعف التهيئة أو عوامل التصفية، تحقق من جميع الإطارات يدويا للتأكد من تنفيذ التحسين بشكل صحيح. إذا لم تتطابق DRR والصور الشعاعية بشكل صحيح، فكرر الخطوات الموضحة في القسم 2.3.2 و 2.3.3.
ملاحظة: تم إجراء تتبع الرسغ لأول مرة باستخدام نموذج تضمن المشط الثاني والثالث (MC2-MC3) لتقليل آثار تداخل العظام وتحسين دقة المطابقة. بعد تحديد موقع DRR المشترك والدوران في الصور الشعاعية ، تم تحويل مواقع MC2-MC3 المتطابقة والمحسنة إلى حجم الصورة الجزئي MC3 ، وتم زرع المواضع الأولية ل MC3. باستخدام هذه المواضع المصنفة ، تم تتبع MC3. على غرار MC3 ، تم أيضا تتبع نصف القطر ، والزند ، والمكون الشعاعي ، والمكون الرسغي في الصور الشعاعية بالفيديو أثناء جميع المهام.
- تحسين ميزات الصور الشعاعية / DRRs (الشكل 4 أ - ب). يعد تحسين ميزات الصورة باستخدام المرشحات خطوة ضرورية لتحقيق تطابق دقيق. حدد معلمات المرشحات الأربعة ، بما في ذلك التباين (اكتشاف الشدة) ، Sobel (اكتشاف الحافة) ، Gaussian (التعتيم / أكثر سلاسة) ، و Sharpen (تقويم الحواف) في البرنامج. يمكن تحديد هذه المرشحات بالنقر بزر الماوس الأيمن على كائنات Rad Renderer أو DRR Renderer الموضحة في عنصر واجهة المستخدم العلوي الأيسر.

الشكل 4. أ) صورة شعاعية ملتقطة لمصدر الأشعة السينية مع الصور الشعاعية المعاد بناؤها رقميا (DRRs) للعظام. ب) التصوير الشعاعي المحسس (المصفى) وDRRs. ج) DRRs المتطابقة بعد عملية التحسين. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- تقليل البيانات. واستنادا إلى معدل الإطارات وجودة الصور الشعاعية، يمكن استخدام أساليب الترشيح مثل طريقة المتوسط المتحرك (بامتداد 5 إطارات). للقيام بذلك ، من قائمة شريط الأدوات ، حدد مربع حوار التتبع المتقدم ، وانقر فوق الزر Smooth . تم استخدام هذا النهج لجميع اللقطات في هذه الدراسة.
- تصدير مواقف العظام / الزرع. بعد مطابقة كل عظم مع الصور الشعاعية ويتم تحسين جميع الإطارات ، قم بتصدير مصفوفات التحويل 4x4 لDRRs في عالم الأشعة السينية بالنقر فوق الزر حفظ التتبع وتحديد إخراج تنسيق المصفوفة. تحدد مصفوفة التحويل هذه دوران وترجمة حجم الصورة الجزئي للعظم / الغرسة في نظام إحداثيات العالم للأشعة السينية المعايرة ويمكن استخدامها للمعالجة الإضافية وحساب الحركة. يجب نقل نظام الإحداثيات لحجم الصورة الجزئي إلى نظام الإحداثيات التشريحية لإجراء تحليل ميكانيكي حيوي ذي مغزى.
3. تحليل البيانات
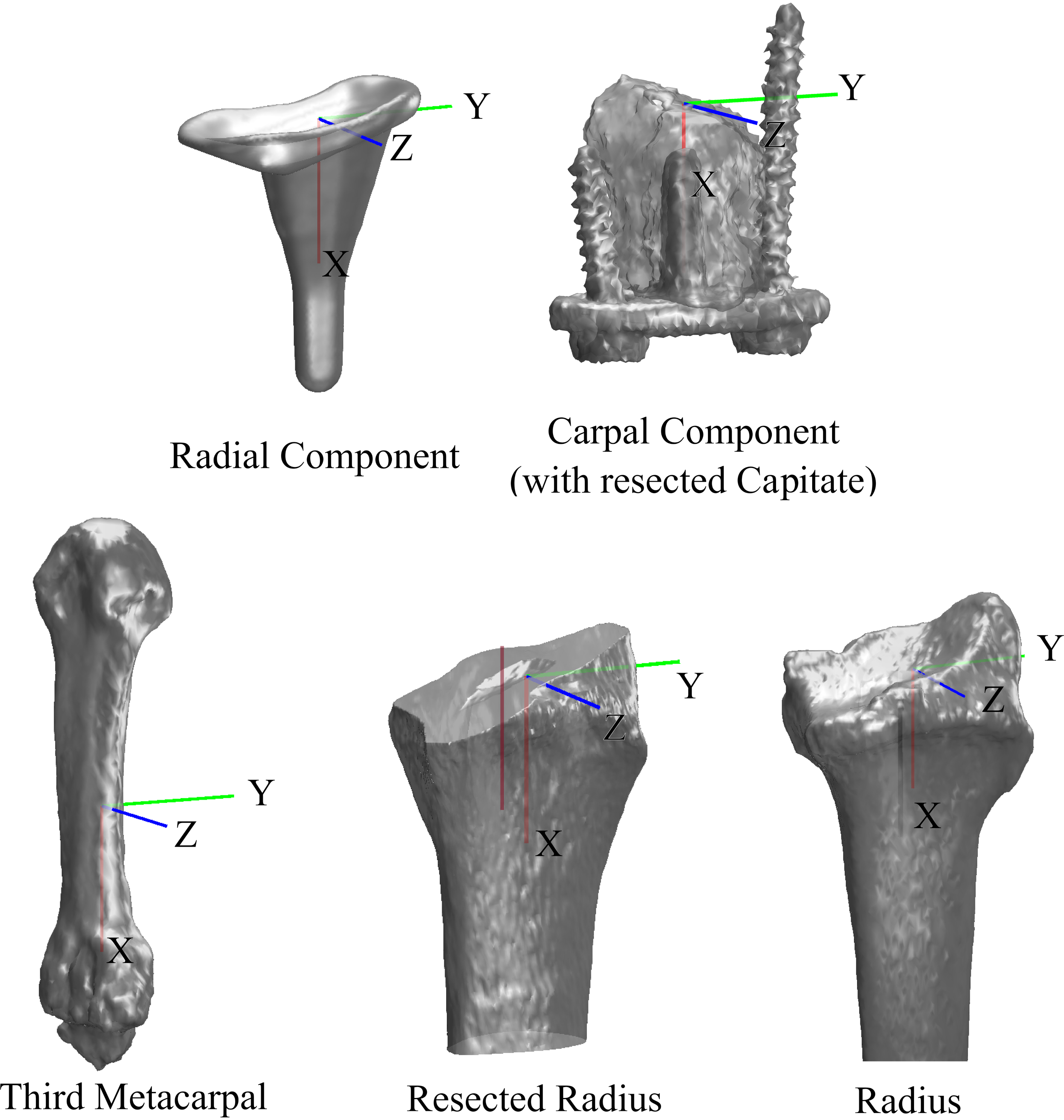
- أنظمة الإحداثيات (الشكل 5). للإبلاغ عن الحركية ، قم ببناء أنظمة الإحداثيات (CS) للعظام ومكونات الزرع بناء على معالمها التشريحية والهندسية. بعد إنشاء CS هذه ، قم بتسجيل النماذج الموجودة في CS الجديد على النماذج السطحية التي تم إنشاؤها في القسم 2.1.4 باستخدام خوارزمية أقرب نقطة تكرارية. يحسب هذا التسجيل الفردي مصفوفة تحويل جديدة 4 × 4 سيتم استخدامها لحسابات الحركية.
ملاحظة: في هذه الدراسة ، تم إنشاء CS لنصف القطر ، والزند ، والمشط الثالث ، والمكون الرسغي ، والمكون الشعاعي ، وغطاء البولي إيثيلين ، والرأس باستخدام الطرق التي تم وصفها سابقا16،22،23.

الشكل 5. تنسيق أنظمة العظام ومكونات الزرع. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- الكينماتيكا. في هذه الدراسة ، حدد حركة المعصم على أنها حركة MC3 بالنسبة إلى نصف القطر ، وتم الإبلاغ عن البيانات الحركية بالنسبة لموضع المعصم المحايد.
- بالنسبة لتحليل DRUJ ، احسب معلمات محور الحركة الحلزوني (HAM)28 لوصف الحركية على أنها الحركة النسبية لنصف القطر CS في الزندي CS ، فيما يتعلق بالوضع المحايد.
- استخدم تحليل HAM لتحديد مركز دوران الرسغ (COR) في الانثناء والتمديد والانحراف الزندي الشعاعي.
- لوصف التحول القريب البعيد أحادي البعد ل COR ، حدد COR المسقط للمعصمين السليمين كنقطة على المحور المركزي لعظم الرأس الذي كان له أقصر مسافة من المحور اللولبي للدوران16.
- قم بتحلل دوران HAM في نظام الإحداثيات الزندي باستخدام المحور اللولبي HAM ، واحسب الكب (الموجب) والاستلقاء (سالب) للساعد. تم تحديد الوضع المحايد عندما كان الاستلقاء على الكب (PS) صفرا.
- أخيرا ، حدد التباين الزندي (UV) على أنه المسافة بين النقرة الزندية والشق السيني في نصف القطر.
- نمط التعبير
- احسب أنماط التلامس بين غطاء البولي إيثيلين والمكون الشعاعي باستخدام حركية المعصم وحقول المسافة الخاصةبالمكون 29.
- احسب حقول المسافة لكل نموذج سطح ثلاثي الأبعاد كمصفوفة حجمية من المسافات الموقعة من السطح.
- احسب قيم تقارب حقول المسافة على سطح غطاء البولي إيثيلين والمكون الشعاعي لكل وضعية.
- للحصول على رقعة التلامس بين المكونات ، اضبط قيم القرب هذه على دقة نظام الاستحواذ (تم تحديد عتبة استبعاد المسافة على أنها 0.70 مم في هذه الدراسة).
- التحليل الإحصائي
- استخدم تحليل Bland-Altman لتقييم الدقة من خلال إظهار التحيز (متوسط الفروق) وحد الاتفاق بنسبة 95٪ (التحيز ± 1.96SD) بين BVR و OMC14 ، 30.
- استخدم النماذج الخطية المعممة (GLM) لوصف مركز سلوك الدوران للمعصم السليم ، ولإيجاد علاقة بين التغيير في الأشعة فوق البنفسجية و PS (الأشعة فوق البنفسجية = p1×PS2 + p2×PS) ، حيث كانت p1 و p2 معاملات تم تحسينها باستخدام الانحدار الخطي. استخدم مقياس الجذر متوسط تربيع الخطأ (RMSE) لتقييم دقة النموذج.
النتائج
يعتمد اختيار برنامج تسجيل الصور من 2D إلى 3D للتتبع المستند إلى النموذج جزئيا على الوصول إلى وحدة معالج الرسومات (GPU) وأنظمة الحوسبة عالية الأداء (HPC). هذه البرامج لها خطوط أنابيب مختلفة ، وحتى الآن ، لا توجد منهجية مشتركة بين البرامج. في هذه الدراسة ، نستخدم Autoscoper ، وهو برنام...
Discussion
التصوير الشعاعي بالفيديو ثنائي المستوى (BVR) هو طريقة قائمة على الصور يمكن استخدامها لقياس حركة العظام والزرع في المعصم والمفصل الزندي الإشعاعي البعيد بدقة دون المليمتر والدرجة الفرعية. في الدراسات التي وصفناها هنا ، تم استخدام BVR لتحديد نمط دقيق من COR المتوقع للمعصم السل...
Disclosures
ليس لدينا تضارب في المصالح للإعلان عنه.
Acknowledgements
يريد المؤلفون أن يشكروا جوزفين كالشوف ولورين بارولا على مراجعة البروتوكول. يريد المؤلفون أيضا أن يشكروا إريكا تافاريس وروهيت باديدا على مساعدتهم طوال عملية الحصول على البيانات ، وكالبيت شاه وأرنولد بيتر فايس وسكوت وولف لمساعدتهم في تفسير البيانات. كانت هذه الدراسة ممكنة بدعم من المعاهد الوطنية للصحة P30GM122732 (COBRE Bio-engineering Core) ومنحة من المؤسسة الأمريكية لجراحة اليد (AFSH).
Materials
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
References
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved